Analysis of Open-Circuit Fault in Fault-Tolerant BLDC Motors with Different Winding Configurations


Abstract
1. Introduction
2. Analysis of Winding Configurations
2.1. Star, Delta and Star–Delta Winding Configurations
2.2. Finite Element Method (FEM) Analysis
2.3. Static Characteristics
2.4. Back Electromotive Force (BEMF)
3. A Mathematical Model of the Analysed Brushless Direct Current Motor with Permanent Magnet (BLDCM)
- -
- Symmetric cylindrical stator and permanent magnet type rotor, linear magnetic circuit;
- -
- Cogging and reluctance torques are neglected;
- -
- Phenomena relating to eddy currents and magnetic hysteresis are neglected—in particular, zero losses in the stator and rotor cores are assumed.
3.1. No-Constraints Phase Voltages, Three-Phase BLDC Star–Delta Model
3.2. Star, Delta and Star–Delta Line Voltage Models
- Model for star (Y) winding BLDC motor
- Model for delta (Δ) winding BLDC motor
- Model for star–delta (YΔ) winding BLDC motor
4. Comparative Analysis, Simulation and Experimental Verification
4.1. Star Configuration—Transient Analysis in Healthy Mode and under Open Phase Fault
4.1.1. Waveforms of Electromagnetic Torque and Currents
4.1.2. FFT of u0
4.2. Delta Configuration—Transient Analysis in Healthy Mode and Under Open Phase Fault
4.2.1. Delta (Δ) Configuration—Waveforms of Electromagnetic Torque and Currents
4.2.2. FFT of u0
4.3. Star–Delta Configuration—Transient Analysis in Healthy Mode and Under Open Phase Fault
4.3.1. Waveforms of Electromagnetic Torque and Currents
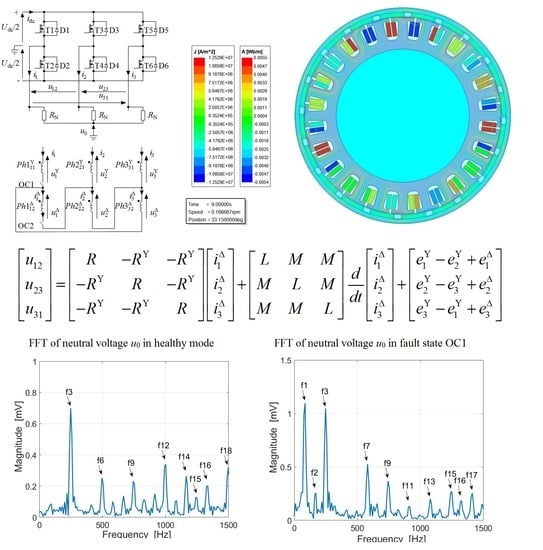
4.3.2. FFT of u0
4.4. Comparative Analysis in Healthy Mode and Under Open Phase Fault
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhou, R.; Li, G.; Wang, Q.; He, J. Torque Calculation of Permanent-Magnet Spherical Motor Based on Permanent-Magnet Surface Current and Lorentz Force. IEEE Trans. Magn. 2020, 56, 1–9. [Google Scholar] [CrossRef]
- Onsal, M.; Cumhur, B.; Demir, Y.; Yolacan, E.; Aydin, M. Rotor Design Optimization of a New Flux-Assisted Consequent Pole Spoke-Type Permanent Magnet Torque Motor for Low-Speed Applications. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Li, Z.; Chen, Q.; Wang, Q. Analysis of Multi-Physics Coupling Field of Multi-Degree-of-Freedom Permanent Magnet Spherical Motor. IEEE Trans. Magn. 2019, 55, 1–5. [Google Scholar] [CrossRef]
- Wei, Y.; Xu, Y.; Zou, J.; Li, Y. Current Limit Strategy for BLDC Motor Drive with Minimized DC-Link Capacitor. IEEE Trans. Ind. Appl. 2015, 51, 3907–3913. [Google Scholar] [CrossRef]
- Shao, J. An Improved Microcontroller-Based Sensorless Brushless DC (BLDC) Motor Drive for Automotive Applications. IEEE Trans. Ind. Appl. 2006, 42, 1216–1221. [Google Scholar] [CrossRef]
- Zhu, J.; Bai, H.; Wang, X.; Li, X. Current Vector Control Strategy in a Dual-Winding Fault-Tolerant Permanent Magnet Motor Drive. IEEE Trans. Energy Convers. 2018, 33, 2191–2199. [Google Scholar] [CrossRef]
- Niu, S.; Luo, Y.; Fu, W.; Zhang, X. An Indirect Reference Vector-Based Model Predictive Control for a Three-Phase PMSM Motor. IEEE Access 2020, 8, 29435–29445. [Google Scholar] [CrossRef]
- Khan, K.R.; Miah, M.S. Fault-Tolerant BLDC Motor-Driven Pump for Fluids with Unknown Specific Gravity: An Experimental Approach. IEEE Access 2020, 8, 30160–30173. [Google Scholar] [CrossRef]
- Chun, T.; Tran, Q.; Lee, H.; Kim, H. Sensorless Control of BLDC Motor Drive for an Automotive Fuel Pump Using a Hysteresis Comparator. IEEE Trans. Power Electron. 2014, 29, 1382–1391. [Google Scholar] [CrossRef]
- Kumar, R.; Singh, B. Grid Interactive Solar PV-Based Water Pumping Using BLDC Motor Drive. IEEE Trans. Ind. Appl. 2019, 55, 5153–5165. [Google Scholar] [CrossRef]
- Ferreira, F.J.T.E.; Baoming, G.; de Almeida, A.T. Stator Winding Connection-Mode Management in Line-Start Permanent Magnet Motors to Improve Their Efficiency and Power Factor. IEEE Trans. Energy Convers. 2013, 28, 523–534. [Google Scholar] [CrossRef]
- Ibrahim, M.N.F.; Rashad, E.; Sergeant, P. Performance Comparison of Conventional Synchronous Reluctance Machines and PM-Assisted Types with Combined Star–DeltaWinding. Energies 2017, 10, 1500. [Google Scholar] [CrossRef]
- Misir, O.; Morteza Raziee, S.; Hammouche, N.; Klaus, C.; Kluge, R.; Ponick, B. Prediction of Losses and Efficiency for Three-Phase Induction Machines Equipped with Combined Star–Delta Windings. IEEE Trans. Ind. Appl. 2017, 53, 3579–3587. [Google Scholar] [CrossRef]
- Lei, Y.; Zhao, Z.; Wang, S.; Dorrell, D.G.; Xu, W. Design and Analysis of Star–Delta Hybrid Windings for High-Voltage Induction Motors. IEEE Trans. Ind. Electron. 2011, 58, 3758–3767. [Google Scholar] [CrossRef]
- Song, X.; Han, B.; Zheng, S.; Fang, J. High-Precision Sensorless Drive for High-Speed BLDC Motors Based on the Virtual Third Harmonic Back-EMF. IEEE Trans. Power Electron. 2018, 33, 1528–1540. [Google Scholar] [CrossRef]
- Ullah, Z.; Hur, J. A Comprehensive Review of Winding Short Circuit Fault and Irreversible Demagnetization Fault Detection in PM Type Machines. Energies 2018, 11, 3309. [Google Scholar] [CrossRef]
- Yang, S. Online Stator Turn Fault Detection for Inverter-Fed Electric Machines Using Neutral Point Voltages Difference. IEEE Trans. Ind. Appl. 2016, 52, 4039–4049. [Google Scholar] [CrossRef]
- Urresty, J.C.; Riba, J.R.; Romeral, L. A Back-emf Based Method to Detect Magnet Failures in PMSMs. IEEE Trans. Mag. 2013, 49, 591–598. [Google Scholar] [CrossRef]
- Korkosz, M.; Prokop, J.; Bogusz, P. Modelling and experimental research of fault-tolerant dual-channel brushless DC motor. IET Electr. Power Appl. 2018, 12, 787–796. [Google Scholar] [CrossRef]
- ANSYS. Ansys Electronics Release 2019 R3; ANSYS Inc.: Canonsburg, PA, USA, 2019. [Google Scholar]


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Y | Δ | YΔ |
|---|---|---|
| = 0.371 N·m/A |
| Y | Δ | YΔ |
|---|---|---|
| = 29.08 V/1000 r/min | = 16.8 V/1000 r/min | = 22.27 V/1000 r/min |
| = 100% |
| Configuration /State of Work | Symmetry | OC1 | OC2 | |||
|---|---|---|---|---|---|---|
| Acoustic Noise [dB] | Acceleration [m/s2] | Acoustic Noise [dB] | Acceleration [m/s2] | Acoustic Noise [dB] | Acceleration [m/s2] | |
| Y | 1.2 | 64.6 | 6.8 | 72.1 | - | - |
| Δ | 1.2 | 64.4 | 1.1 | 64.3 | - | - |
| YΔ | 0.9 | 64.1 | 6.6 | 70.4 | 1.0 | 64.3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korkosz, M.; Prokop, J.; Pakla, B.; Podskarbi, G.; Bogusz, P. Analysis of Open-Circuit Fault in Fault-Tolerant BLDC Motors with Different Winding Configurations. Energies 2020, 13, 5321. https://doi.org/10.3390/en13205321
Korkosz M, Prokop J, Pakla B, Podskarbi G, Bogusz P. Analysis of Open-Circuit Fault in Fault-Tolerant BLDC Motors with Different Winding Configurations. Energies. 2020; 13(20):5321. https://doi.org/10.3390/en13205321
Chicago/Turabian StyleKorkosz, Mariusz, Jan Prokop, Bartlomiej Pakla, Grzegorz Podskarbi, and Piotr Bogusz. 2020. "Analysis of Open-Circuit Fault in Fault-Tolerant BLDC Motors with Different Winding Configurations" Energies 13, no. 20: 5321. https://doi.org/10.3390/en13205321
APA StyleKorkosz, M., Prokop, J., Pakla, B., Podskarbi, G., & Bogusz, P. (2020). Analysis of Open-Circuit Fault in Fault-Tolerant BLDC Motors with Different Winding Configurations. Energies, 13(20), 5321. https://doi.org/10.3390/en13205321