Intelligent Recognition of Insulator Contamination Grade Based on the Deep Learning of Ultraviolet Discharge Image Information


Abstract
:1. Introduction
2. Theories of SAE and DBN
2.1. Extraction of Sparse Features with Sparse Autoencoder
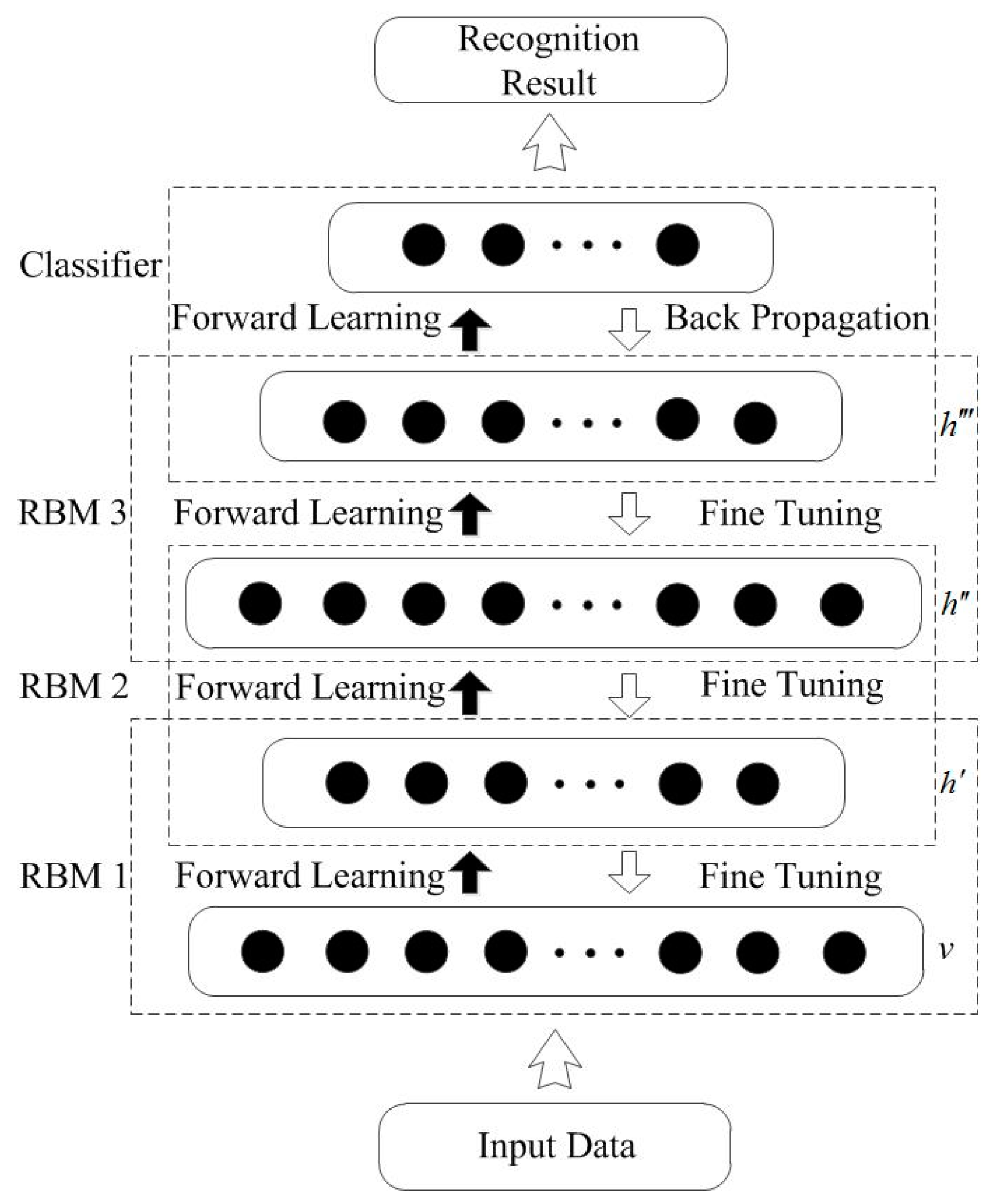
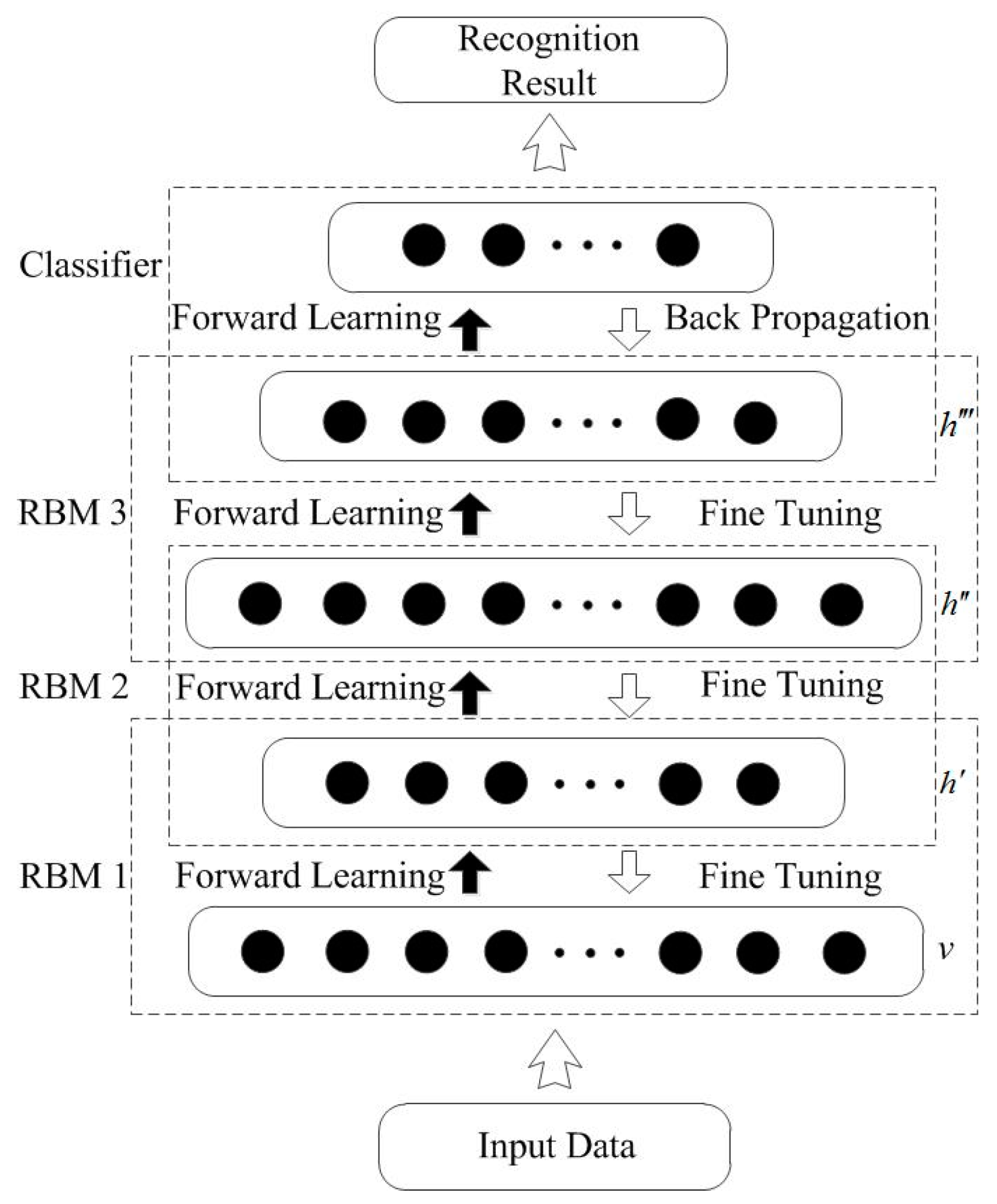
2.2. Deep Belief Network
2.2.1. Forward Unsupervised Layer-by-Layer Learning of RBM
2.2.2. Backward Supervised Fine-Tuning Learning
3. Experimental Results and Analysis
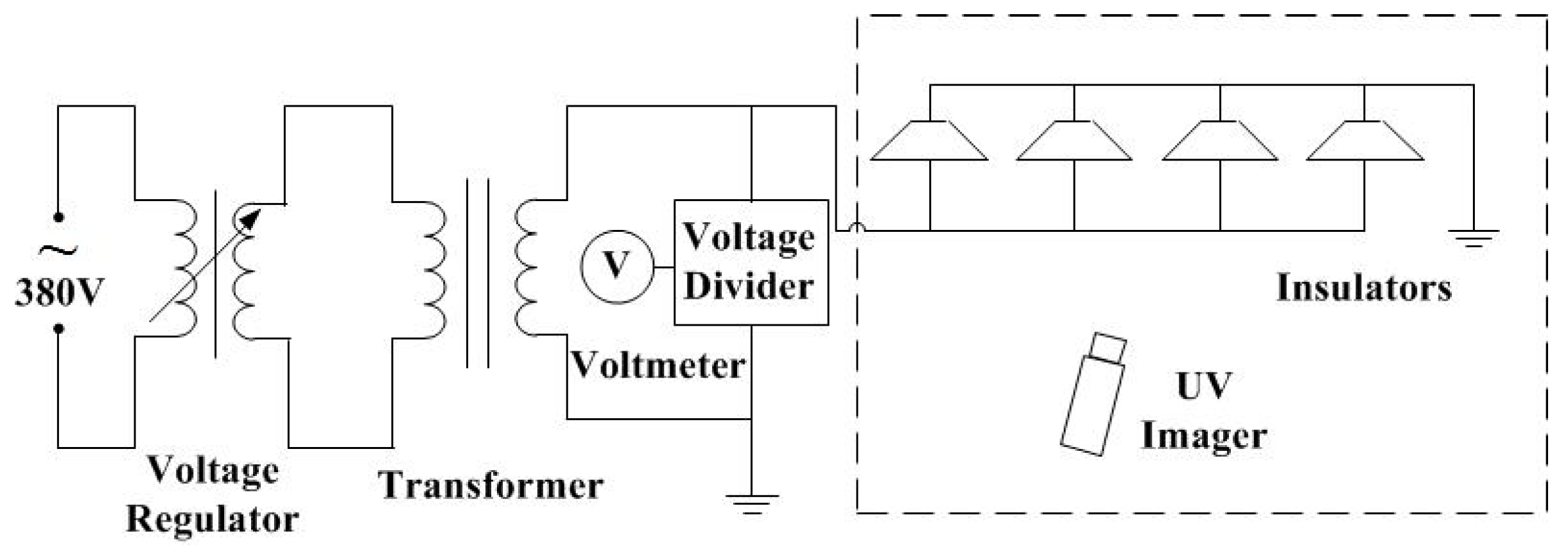
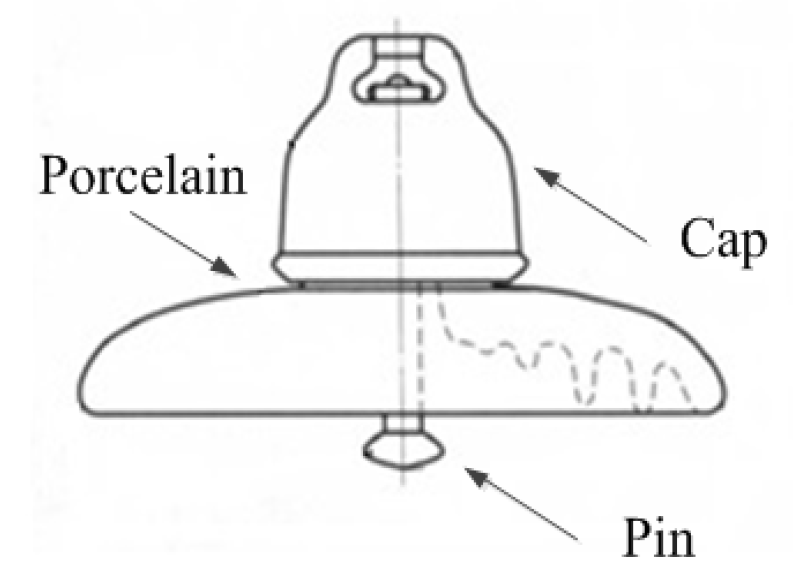
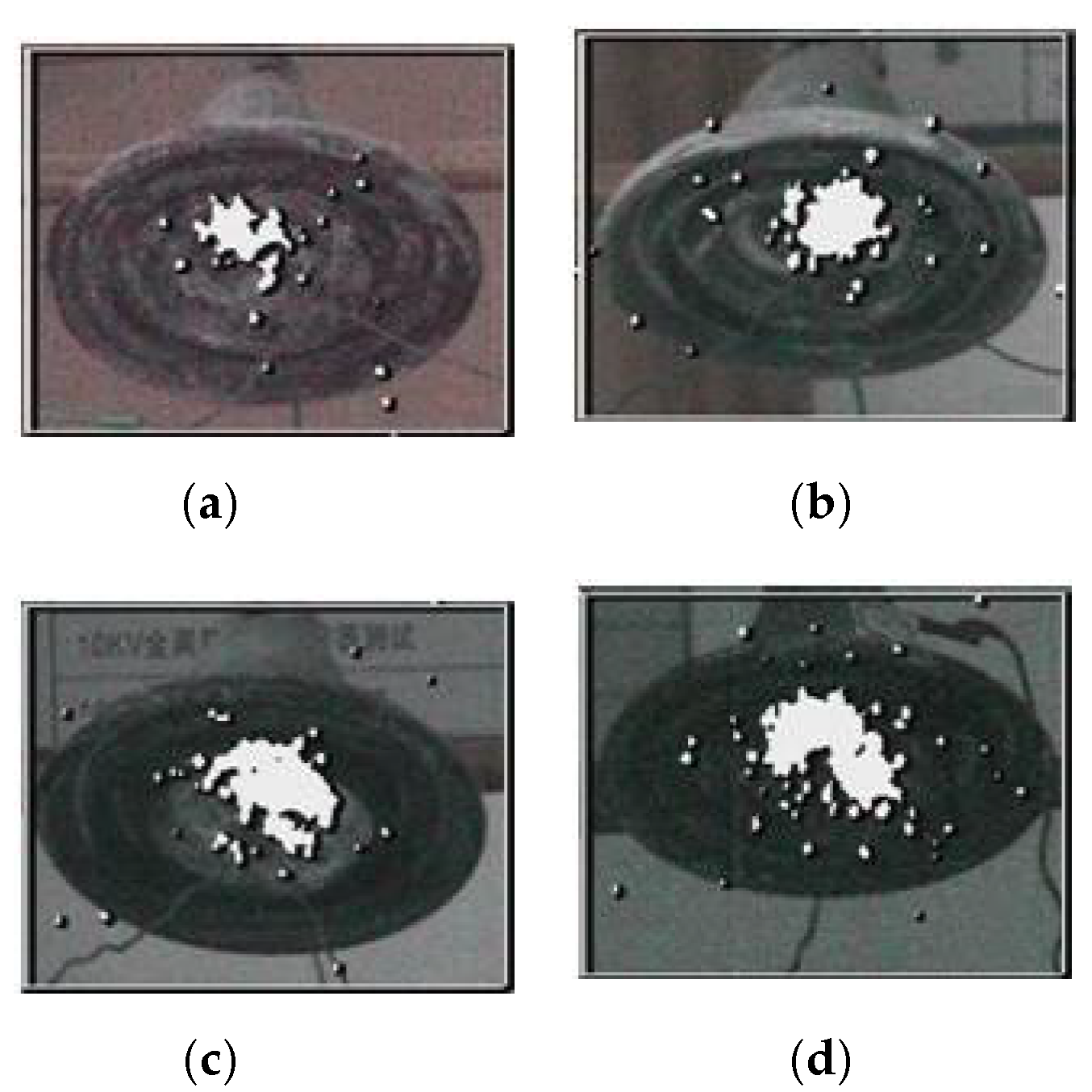
3.1. High Voltage Experiment for Contaminated Insulators
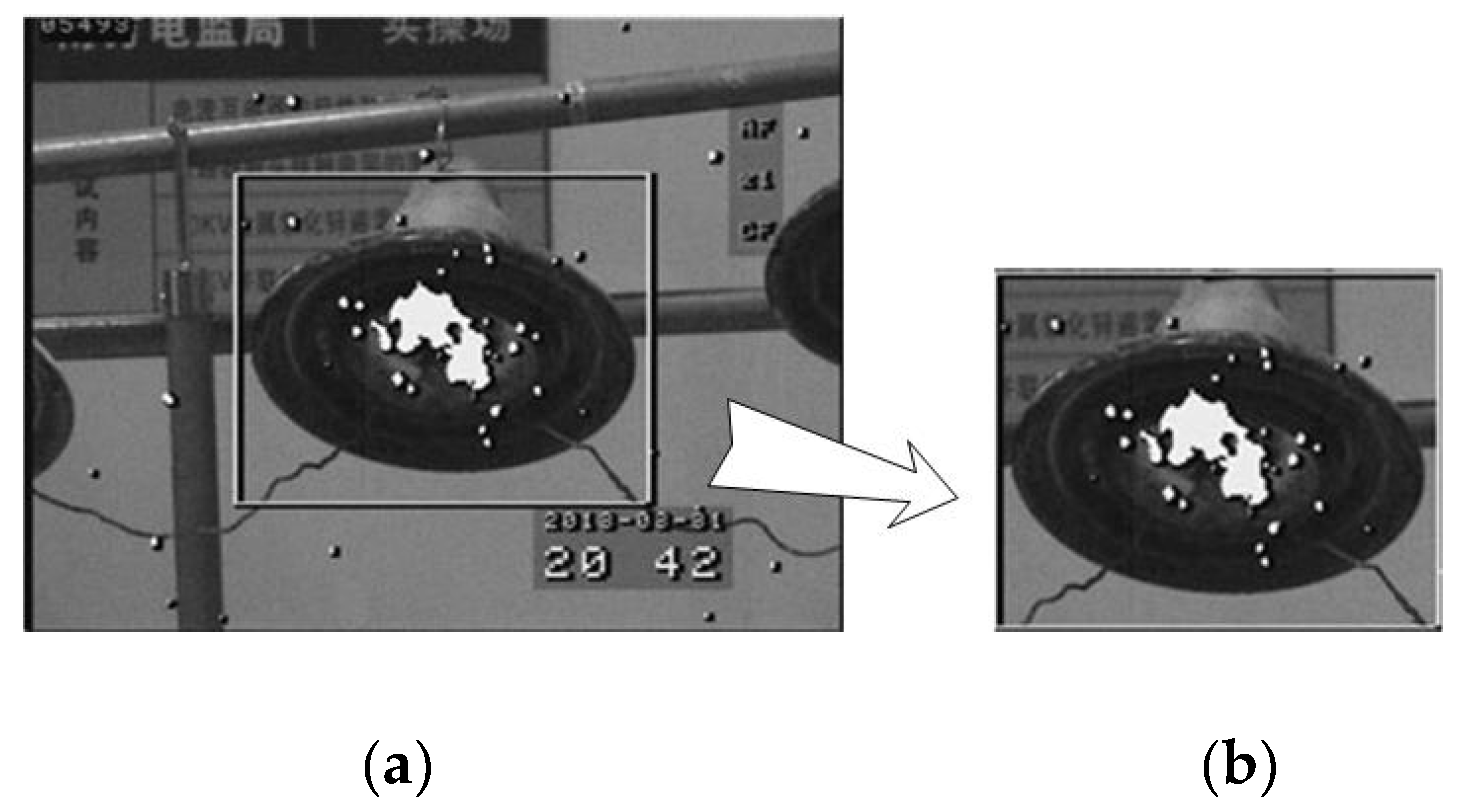
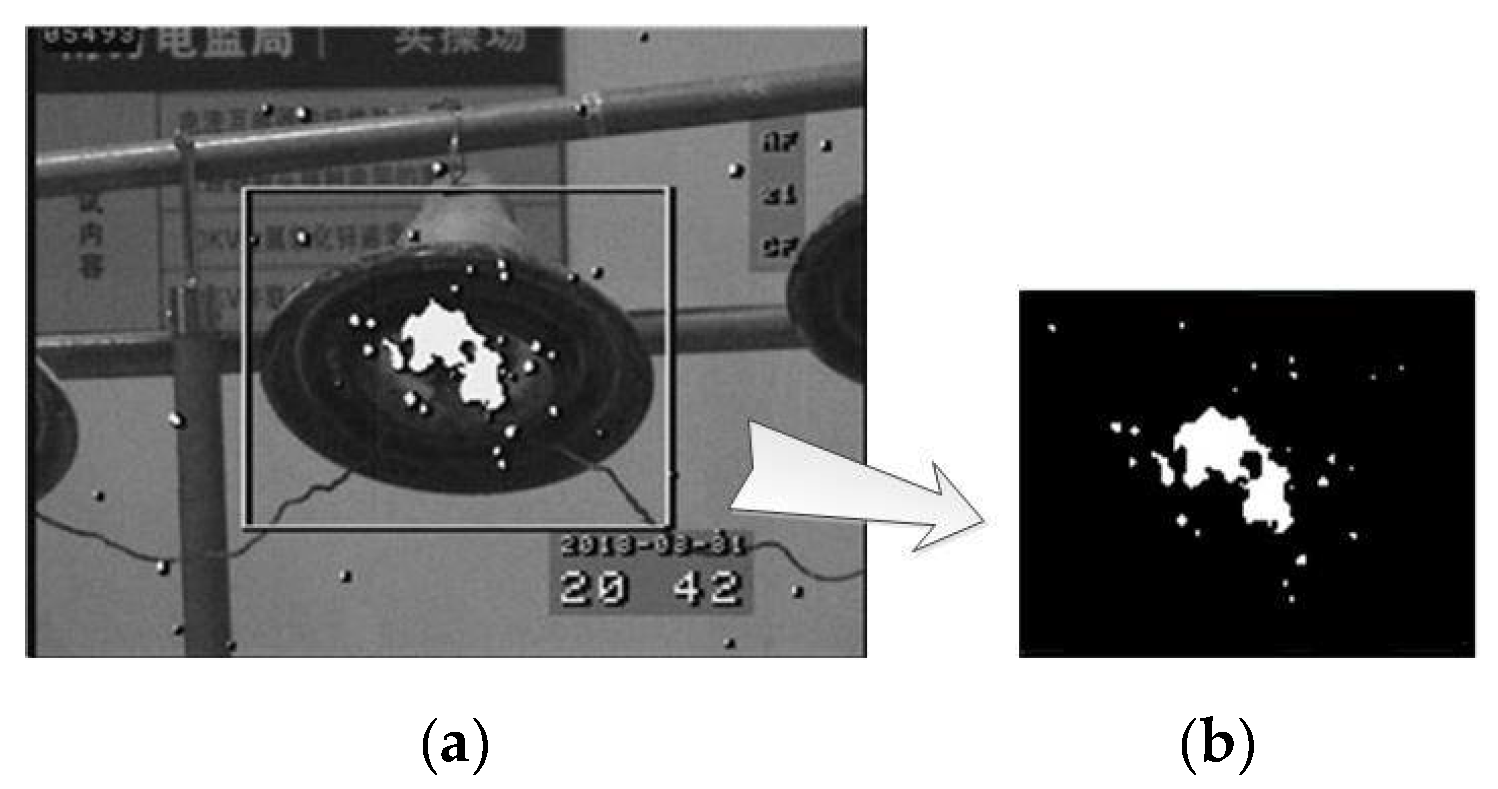
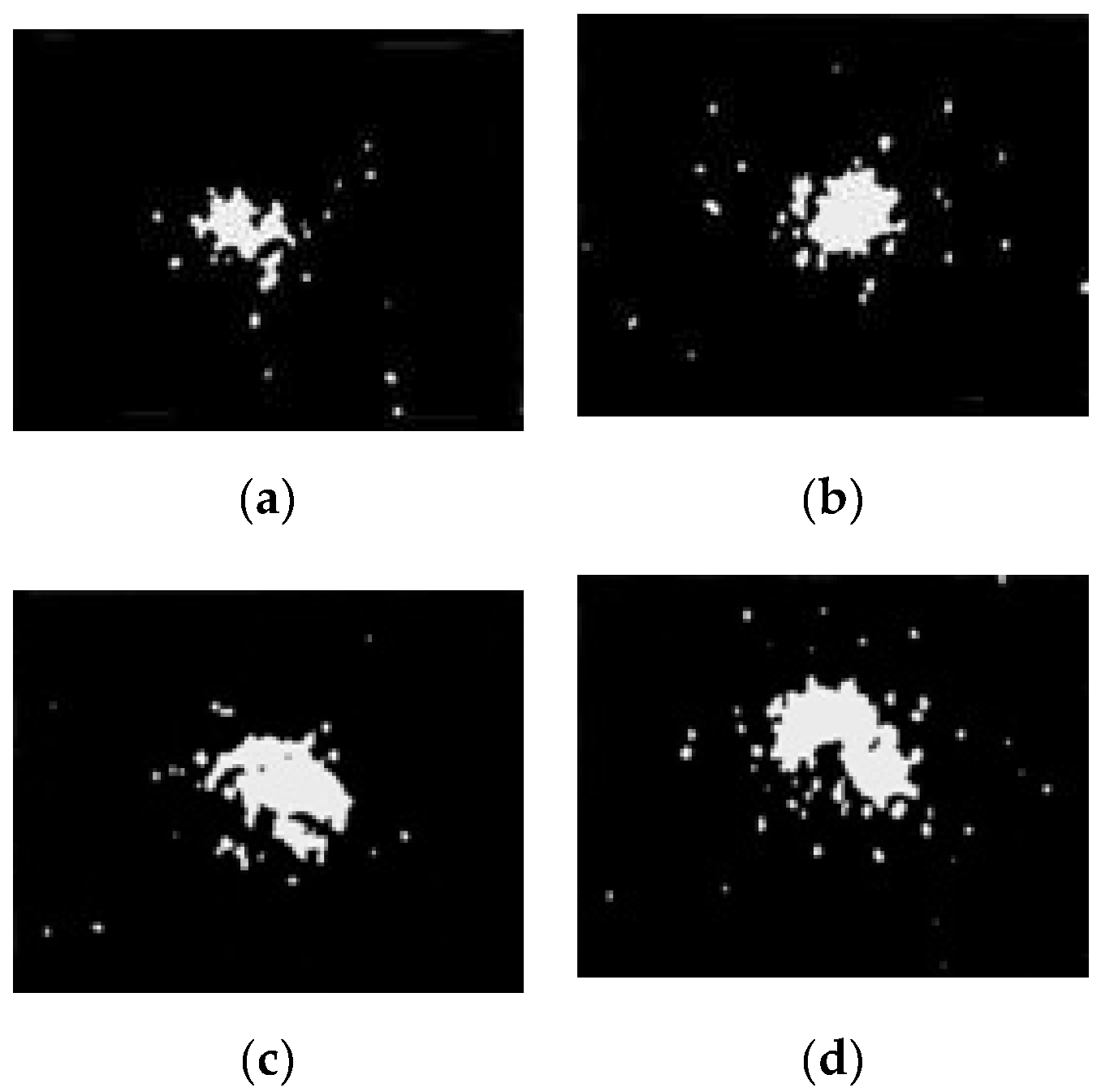
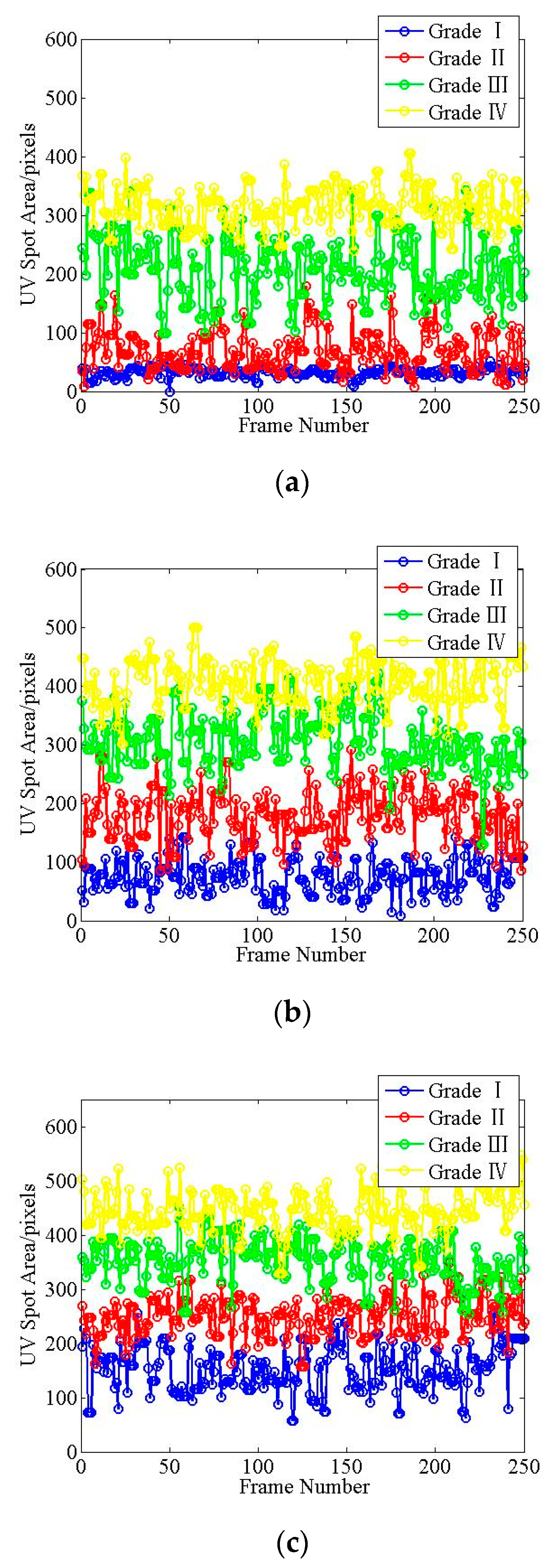
3.2. Preprocessing of the Ultraviolet Images
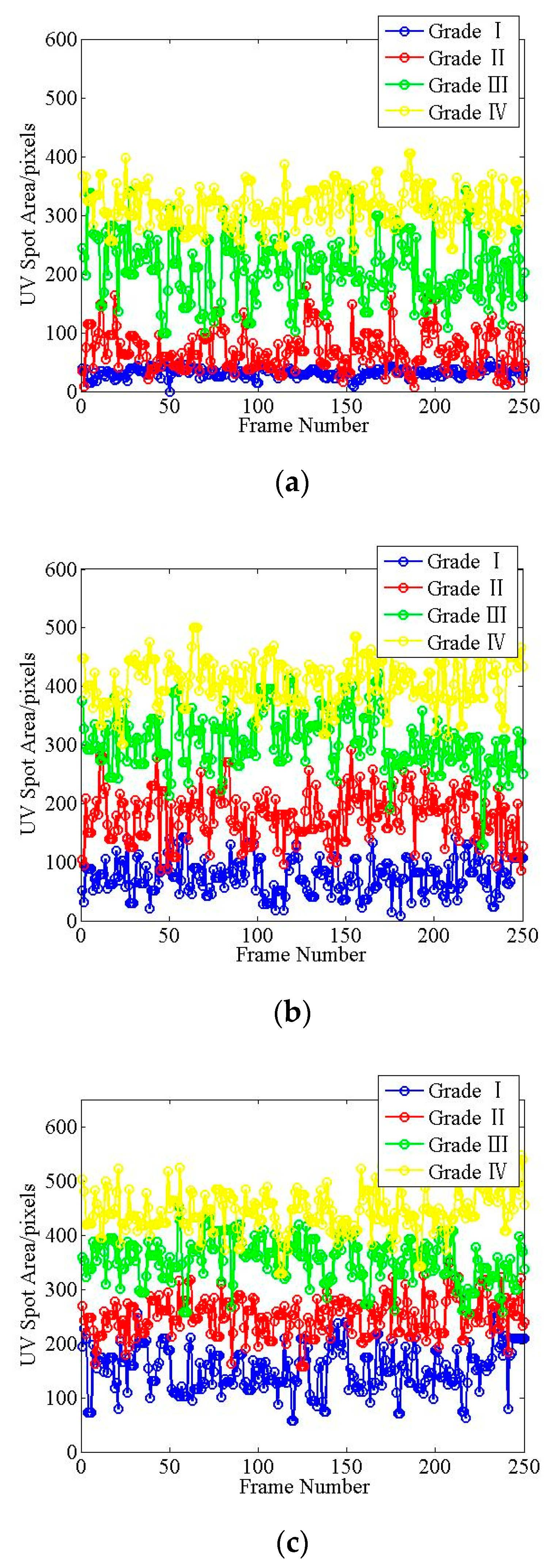
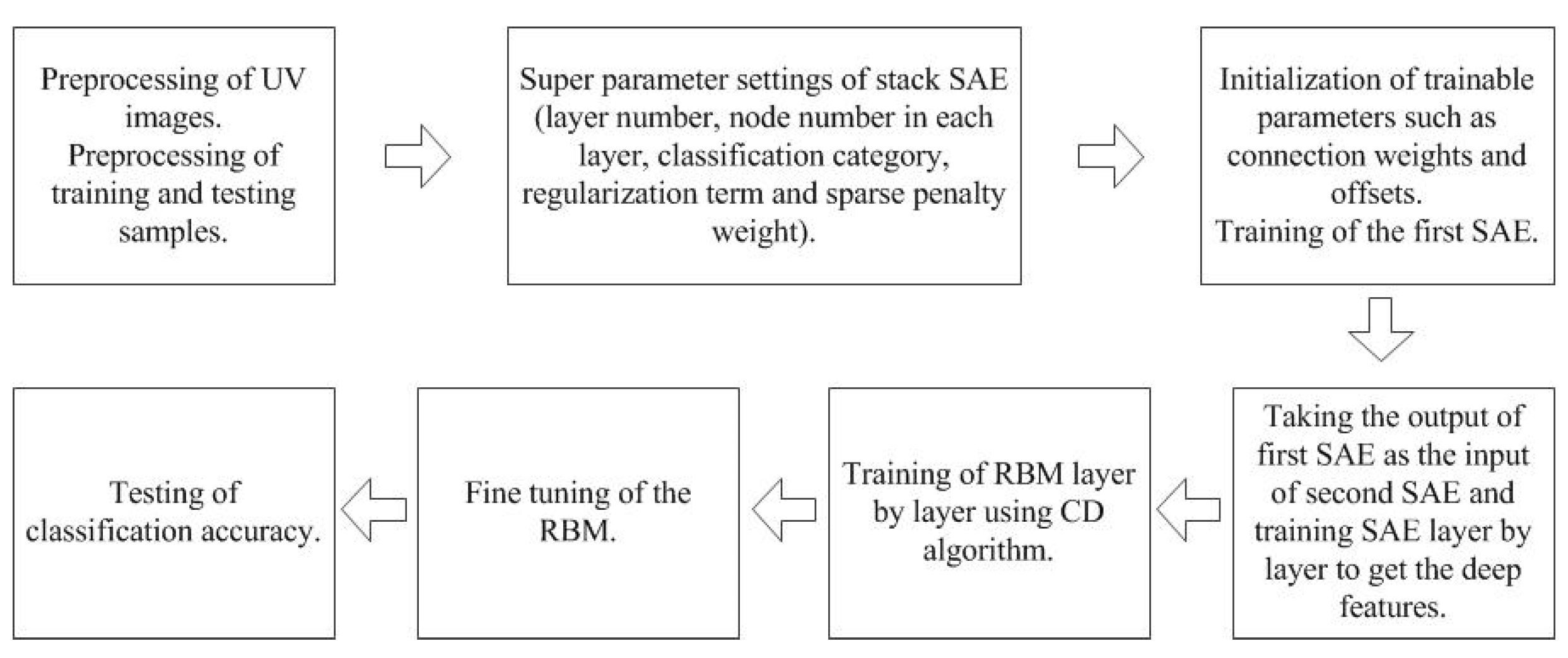
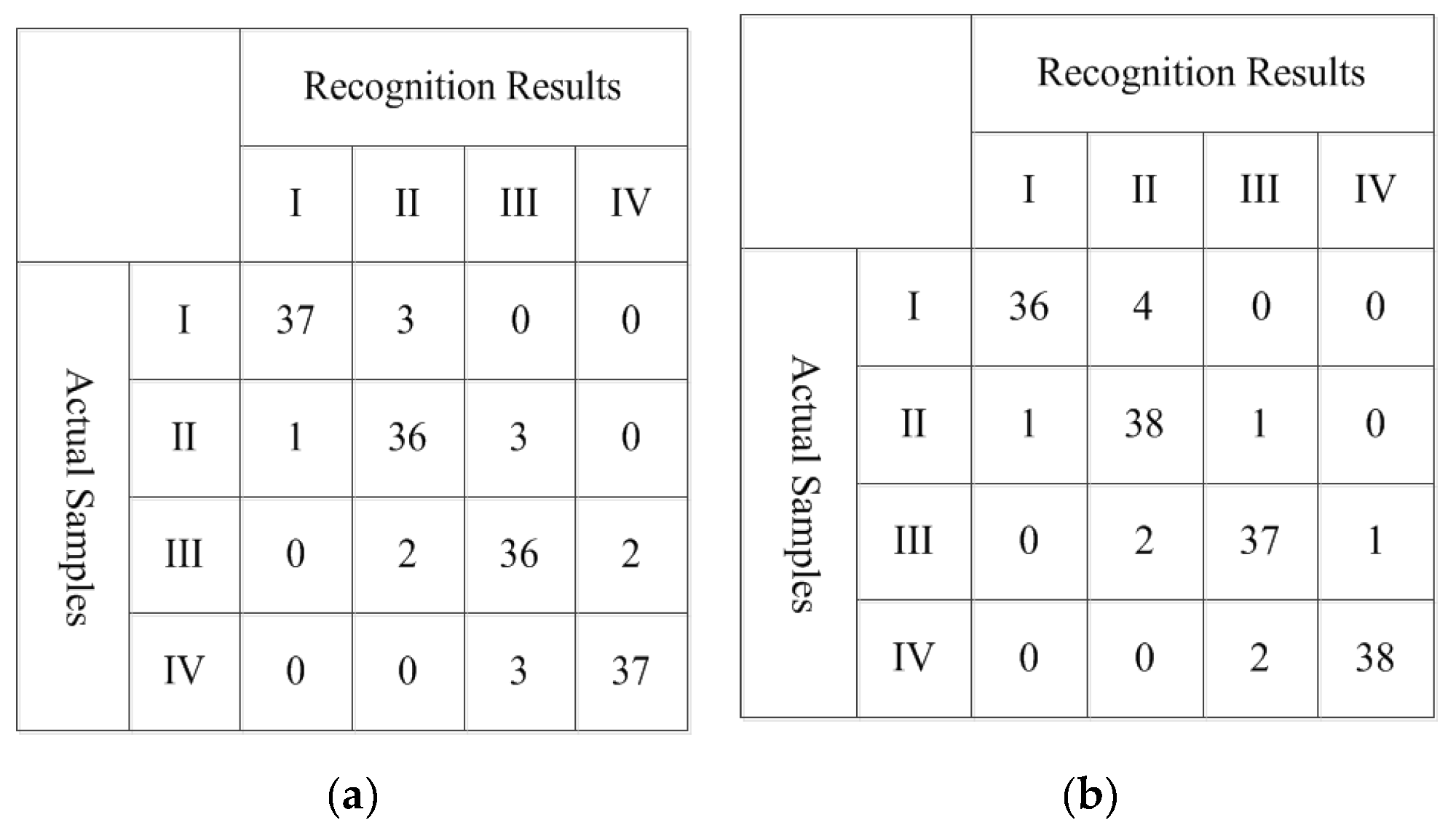
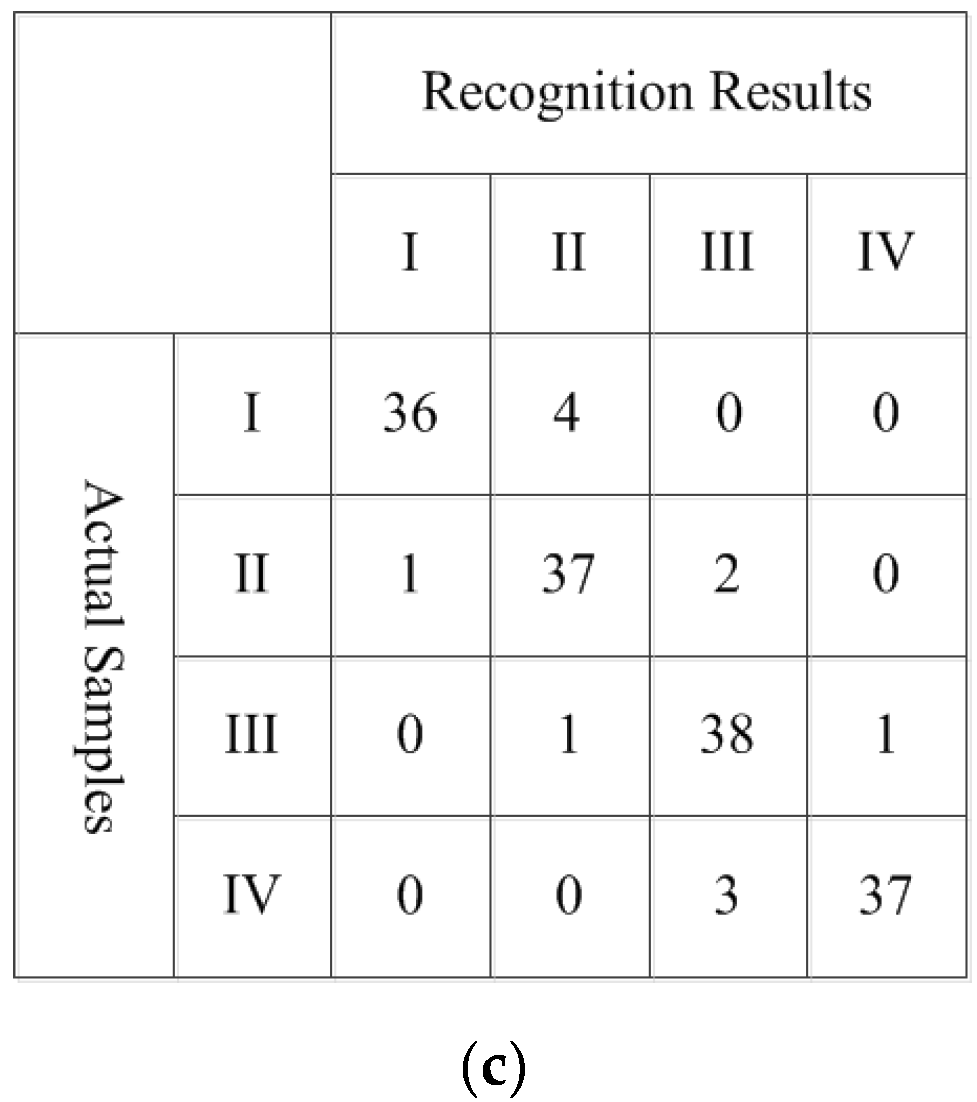
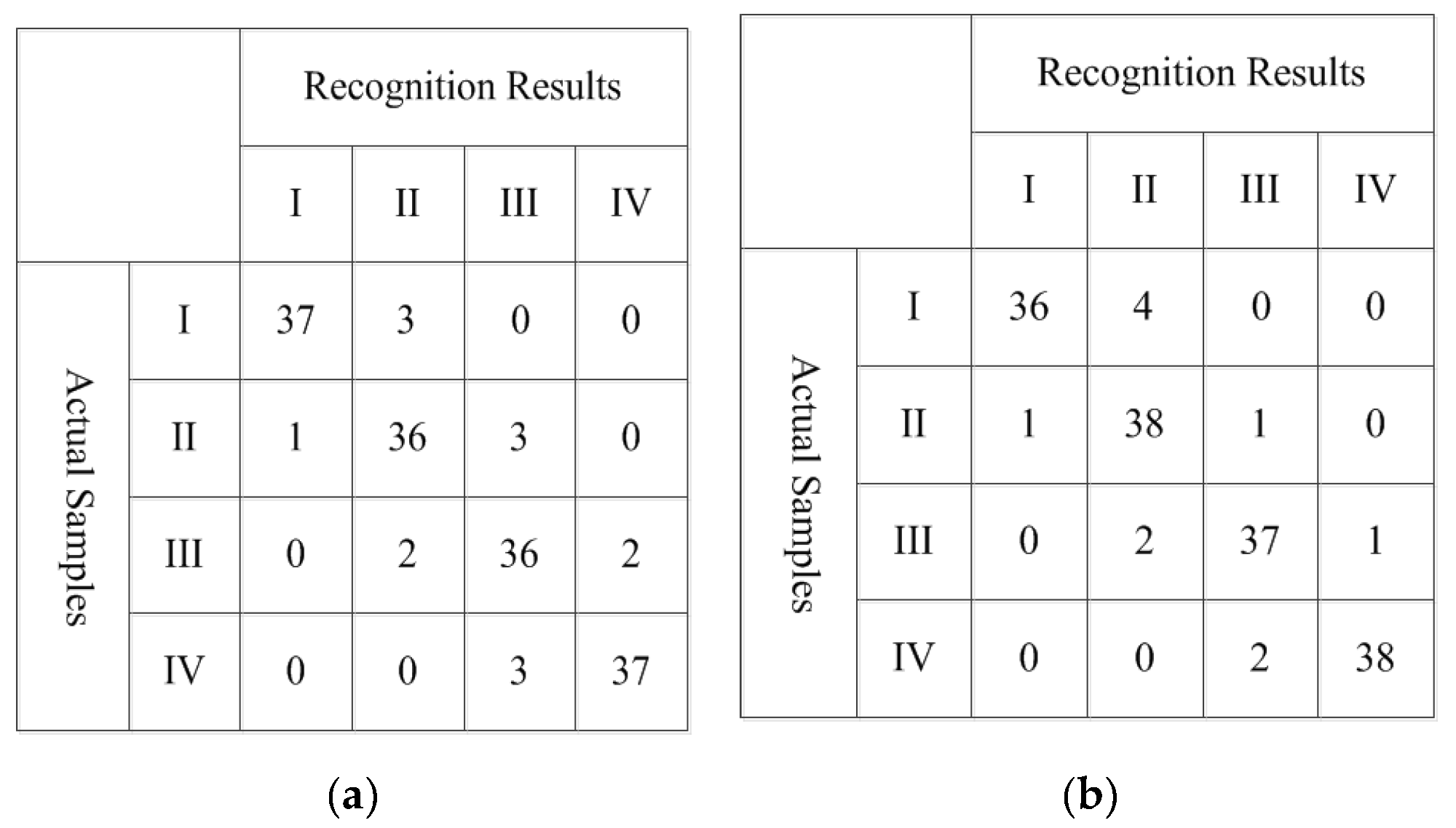
3.3. Recognition of Contamination Grades
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- He, J.; Gorur, R.S. Flashover of insulators in a wet environment. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 1038–1044. [Google Scholar] [CrossRef]
- Zhang, D.; Meng, F.C. Research on the Interrelation between temperature distribution and dry band on wet contaminated insulators. Energies 2019, 12, 4289. [Google Scholar] [CrossRef] [Green Version]
- Qiao, X.H.; Zhang, Z.J.; Jiang, X.L.; Tian, L. Influence of DC electric fields on pollution of HVDC composition insulator short samples with different environmental parameters. Energies 2019, 12, 2304. [Google Scholar] [CrossRef] [Green Version]
- Deb, S.; Choudhury, N.R.; Ghosh, R.; Chatterjee, B.; Dalai, S. Short time modified Hilbert transform-aided sparse representation for sensing of overhead line insulator contamination. IEEE Sens. J. 2018, 18, 8125–8132. [Google Scholar] [CrossRef]
- Li, L.; Li, Y.; Lu, M.; Liu, Z.; Wang, C.; Lv, Z. Quantification and comparison of insulator pollution characteristics based on normality of relative contamination values. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 965–973. [Google Scholar] [CrossRef]
- Cao, B.; Wang, L.; Yin, F. A low-cost evaluation and correction method for the soluble salt components of the insulator contamination layer. IEEE Sens. J. 2019, 19, 5266–5273. [Google Scholar] [CrossRef]
- Jiang, Y.; McMeekin, S.G.; Reid, A.J.; Nekahi, A.; Judd, M.D.; Wilson, A. Monitoring contamination level on insulator materials under dry condition with a microwave reflectometer. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 1427–1434. [Google Scholar] [CrossRef]
- Banik, A.; Dalai, S.; Chatterjee, B. Autocorrelation aided rough set based contamination level prediction of high voltage insulator at different environmental condition. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 2883–2891. [Google Scholar] [CrossRef]
- Lv, Y.; Zhao, W.; Song, Q. Simulation on deposition characteristics of contamination particles in fog-haze environment. IEEE Access 2020, 8, 26119–26128. [Google Scholar] [CrossRef]
- Wang, J.; Wang, K.; Zhou, M.; Zhao, L.; Yao, S.; Fang, C. The natural contamination of XP-70 insulators in Shenzhen, China. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 349–358. [Google Scholar] [CrossRef]
- Cao, B.; Wang, L.; Li, X.; Guan, Z. Influence of partial electric arc on the contamination degree monitoring system in view of leakage current. IEEE Trans. Dielectr. Electr. Insul. 2018, 25, 1545–1552. [Google Scholar] [CrossRef]
- Zhang, Z.J.; Yang, S.H.; Jiang, X.L.; Qiao, X.H.; Xiang, Y.Z.; Zhang, D.D. DC flashover dynamic model of post insulator under non-uniform pollution between windward and leeward sides. Energies 2019, 12, 2345. [Google Scholar] [CrossRef] [Green Version]
- Cao, B.; Wang, L.; Yin, F. Measurement of saturated water absorption of the contamination layer deposited on insulator surface. IEEE Sens. J. 2019, 19, 10804–10811. [Google Scholar] [CrossRef]
- Yang, D.; Yin, F.; Mei, H.; Wang, L.; Guo, C. In-situ monitoring of electrolytic corrosion on the caps of HVDC insulators. IEEE Sens. J. 2018, 18, 8569–8577. [Google Scholar]
- Albano, M.; Haddad, A.M.; Bungay, N. Is the dry-band characteristic a function of pollution and insulator design? Energies 2019, 12, 3607. [Google Scholar] [CrossRef] [Green Version]
- Salem, A.A.; Abd-Rahman, R.; Al-Gailani, S.A.; Kamarudin, M.S.; Ahmad, H.; Salam, Z. The leakage current components as a diagnostic tool to estimate contamination level on high voltage insulators. IEEE Access 2020, 8, 92514–92528. [Google Scholar] [CrossRef]
- Boulanouar, H.; Bayadi, A.; Haddad, A. Analysis of textured silicone rubber performance under contaminated conditions. IET Sci. Meas. Technol. 2019, 13, 461–468. [Google Scholar] [CrossRef]
- Li, Y.B.; Zou, L.; Jiang, L.; Zhou, X.Y. Fault diagnosis of rotating machinery based on combination of deep belief network and one-dimensional convolutional neural network. IEEE Access 2019, 7, 165710–165723. [Google Scholar] [CrossRef]
- Ian, G.; Courville, A.; Bengion, Y. Large scale featurelearning with spike and slab sparse coding. In Proceedings of the 29th International Conference of Machine Learning, Edinburgh, UK, 26 June–1 July 2012; pp. 1439–1446. [Google Scholar]
- Hinton, G.E. Training products of experts by minimizing contrastive divergence. Neural Comput. 2002, 14, 1771–1800. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated Voltage (kV) | Top Surface (cm2) | Bottom Surface (cm2) | Creepage Distance (mm) | Structural Height (mm) | Diameter (mm) |
|---|---|---|---|---|---|
| 10 | 674 | 917 | 295 | 146 | 255 |
| Contamination Grade | I | II | III | IV |
|---|---|---|---|---|
| ESDD Range (mg/cm2) | 0.03–0.06 | 0.06–0.1 | 0.1–0.25 | 0.25–0.35 |
| Relative Humidity | Recognition Accuracy (%) | ||||
|---|---|---|---|---|---|
| Grade I | Grade II | Grade III | Grade IV | Total Accuracy | |
| 80% | 92.5 | 90 | 90 | 92.5 | 91.25 |
| 85% | 90 | 95 | 92.5 | 95 | 93.125 |
| 90% | 90 | 92.5 | 95 | 92.5 | 92.5 |
| Relative Humidity | Recognition Accuracy (%) | ||||
|---|---|---|---|---|---|
| Grade I | Grade II | Grade III | Grade IV | Total Accuracy | |
| 80% | 80 | 80 | 80 | 82.5 | 80.625 |
| 85% | 80 | 82.5 | 85 | 82.5 | 82.5 |
| 90% | 82.5 | 85 | 82.5 | 82.5 | 83.125 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, D.; Chen, S. Intelligent Recognition of Insulator Contamination Grade Based on the Deep Learning of Ultraviolet Discharge Image Information. Energies 2020, 13, 5221. https://doi.org/10.3390/en13195221
Zhang D, Chen S. Intelligent Recognition of Insulator Contamination Grade Based on the Deep Learning of Ultraviolet Discharge Image Information. Energies. 2020; 13(19):5221. https://doi.org/10.3390/en13195221
Chicago/Turabian StyleZhang, Da, and Shuailin Chen. 2020. "Intelligent Recognition of Insulator Contamination Grade Based on the Deep Learning of Ultraviolet Discharge Image Information" Energies 13, no. 19: 5221. https://doi.org/10.3390/en13195221
APA StyleZhang, D., & Chen, S. (2020). Intelligent Recognition of Insulator Contamination Grade Based on the Deep Learning of Ultraviolet Discharge Image Information. Energies, 13(19), 5221. https://doi.org/10.3390/en13195221