Expansion of Operating Speed Range of High-Speed BLDC Motor Using Hybrid PWM Switching Method Considering Dead Time


Abstract
1. Introduction
2. Three-Phase BLDC Motor Inverter System and PWM Methods
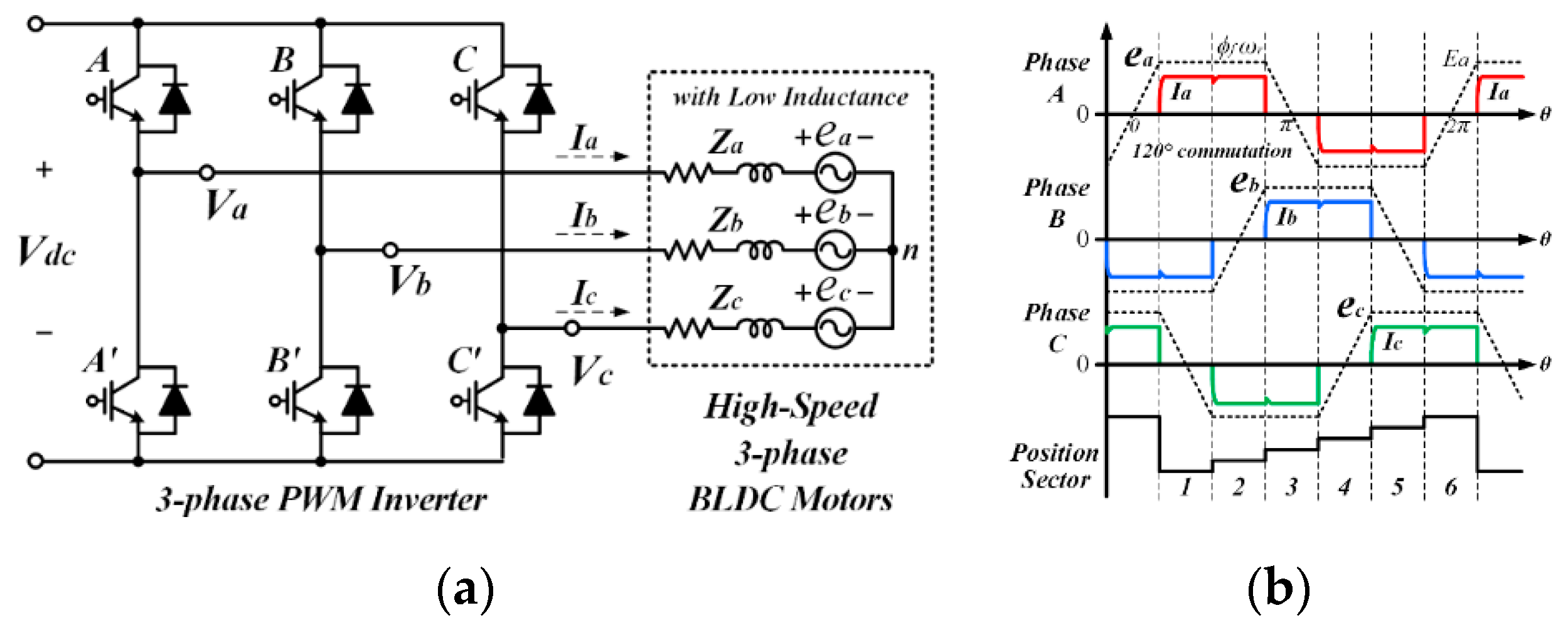
2.1. Three-Phase BLDC Motor Inverter System
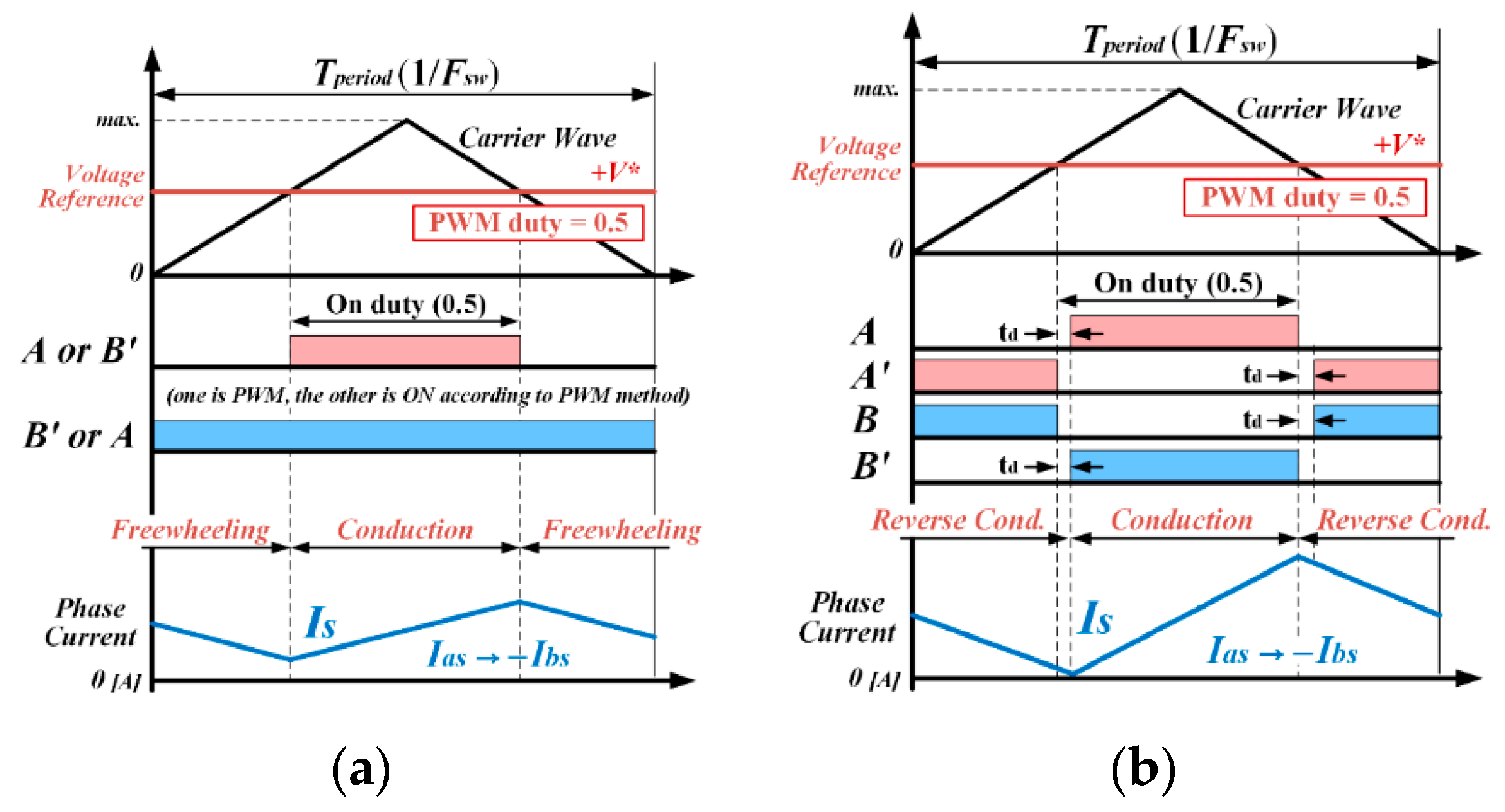
2.2. Unipolar and Bipolar PWM Methods
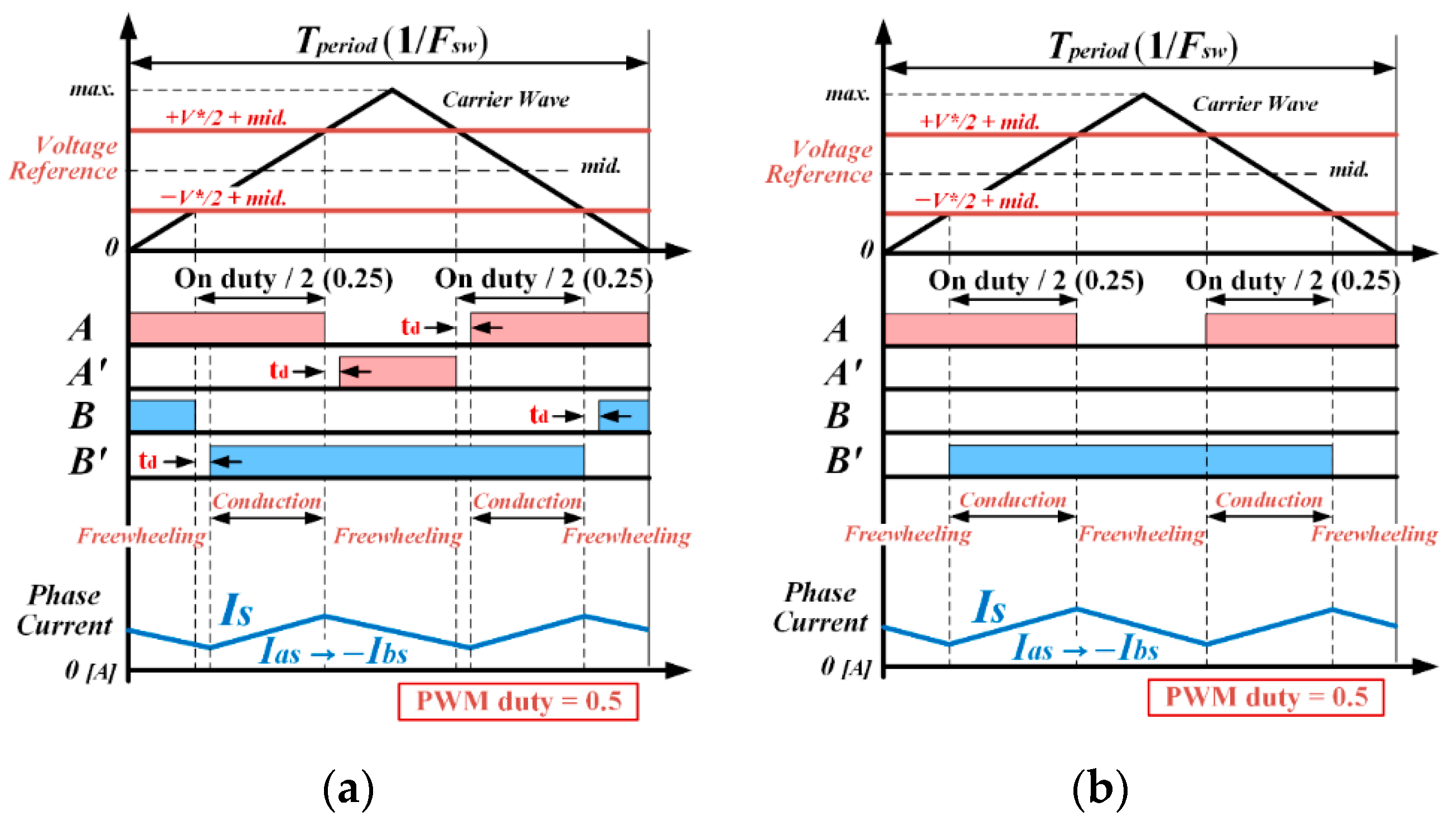
2.3. H-PWM-L-PWM Method for High-Speed BLDC Motors
2.4. Relationship between Dead Time and Voltage Utilization Rate
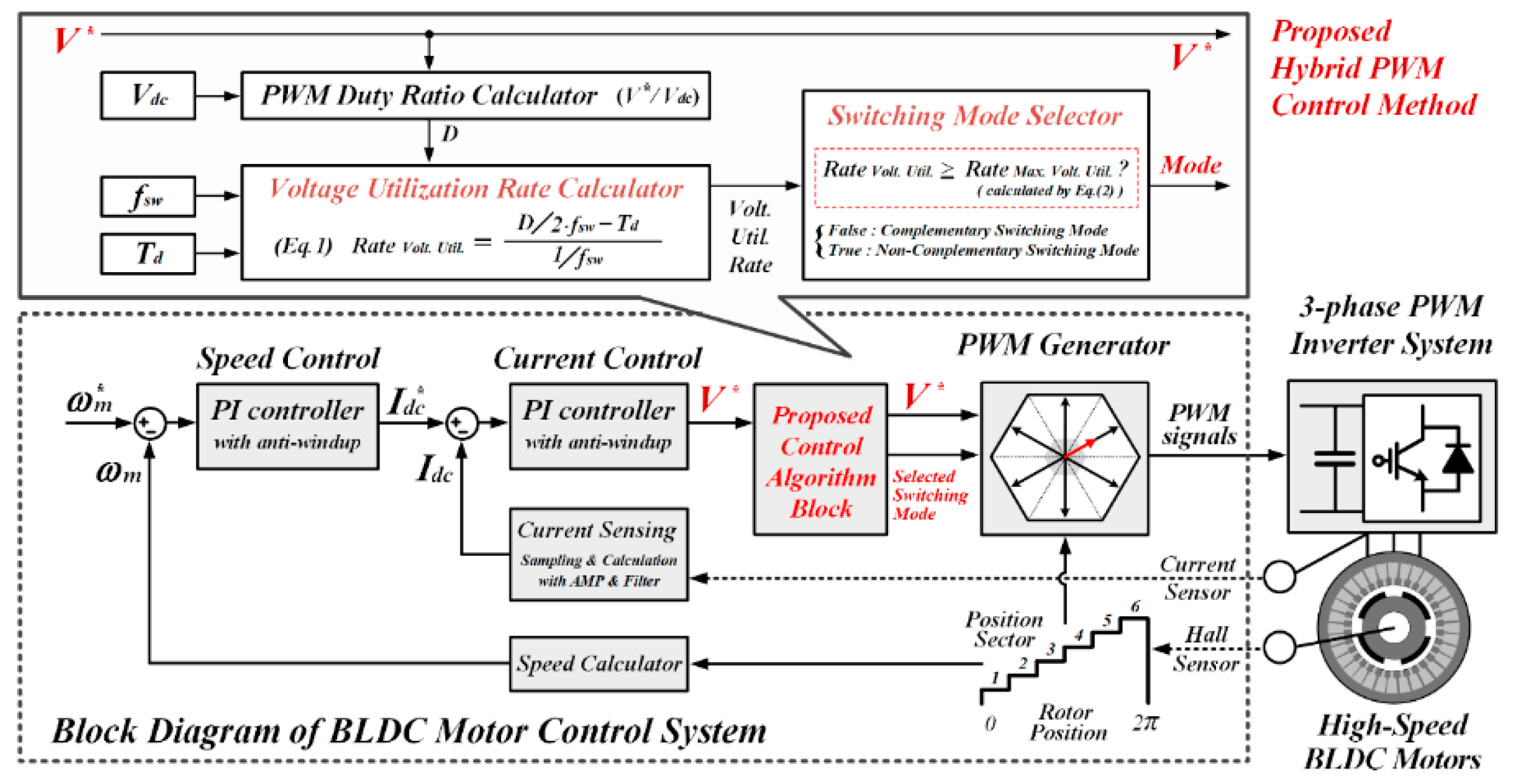
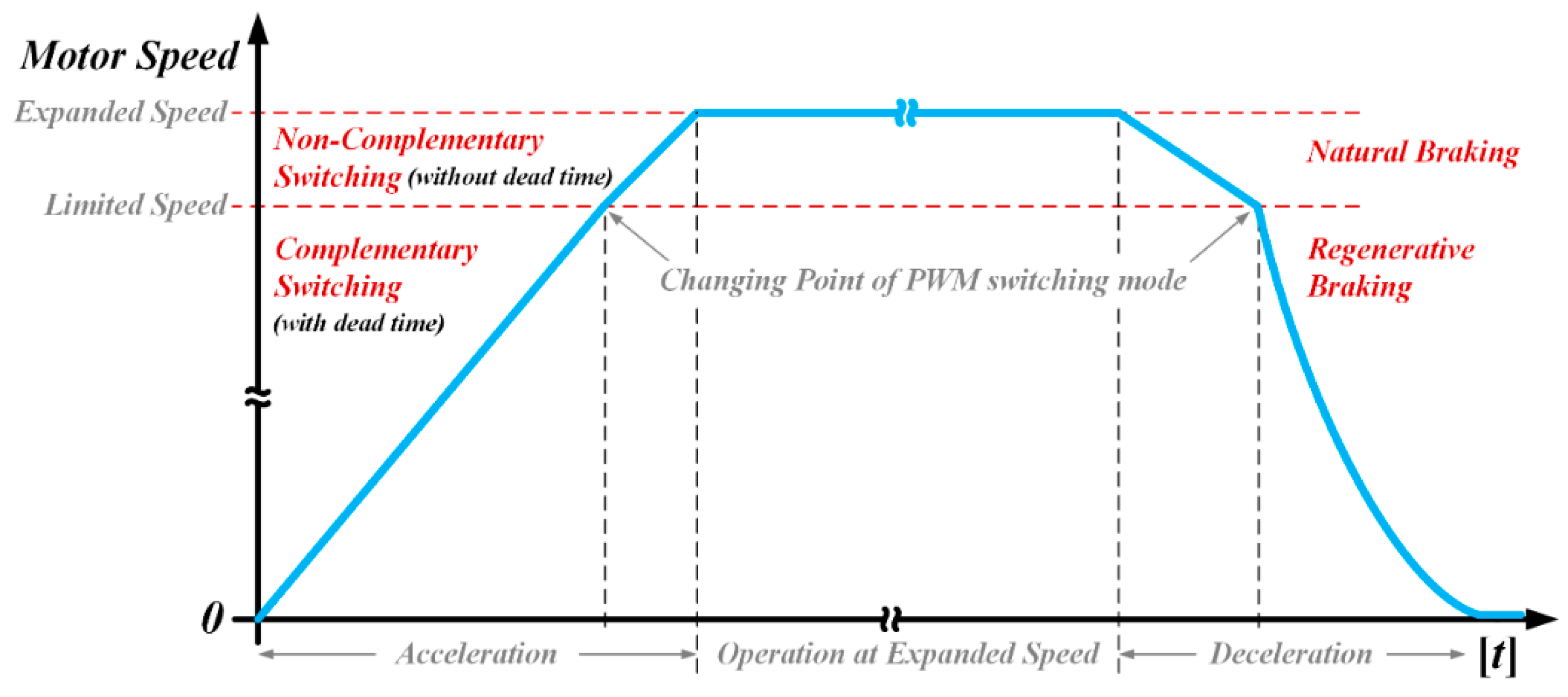
3. Proposed Hybrid PWM Control Method
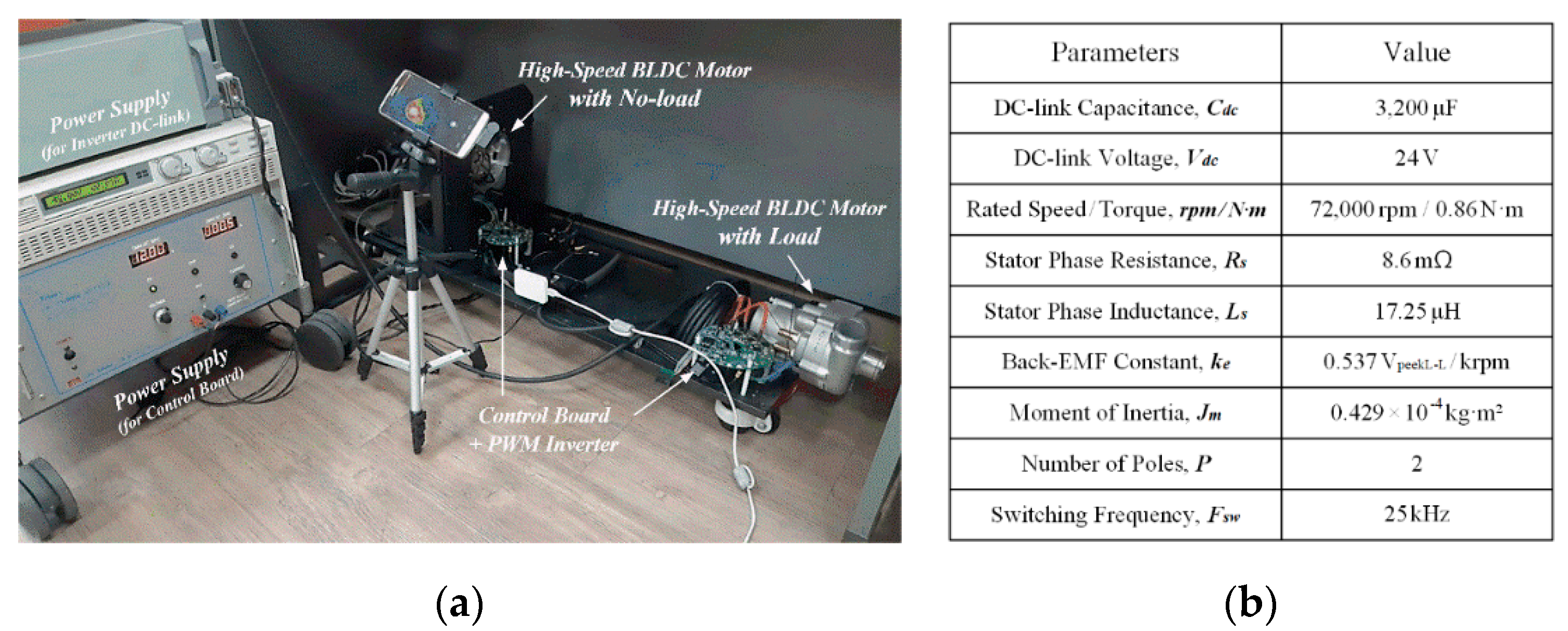
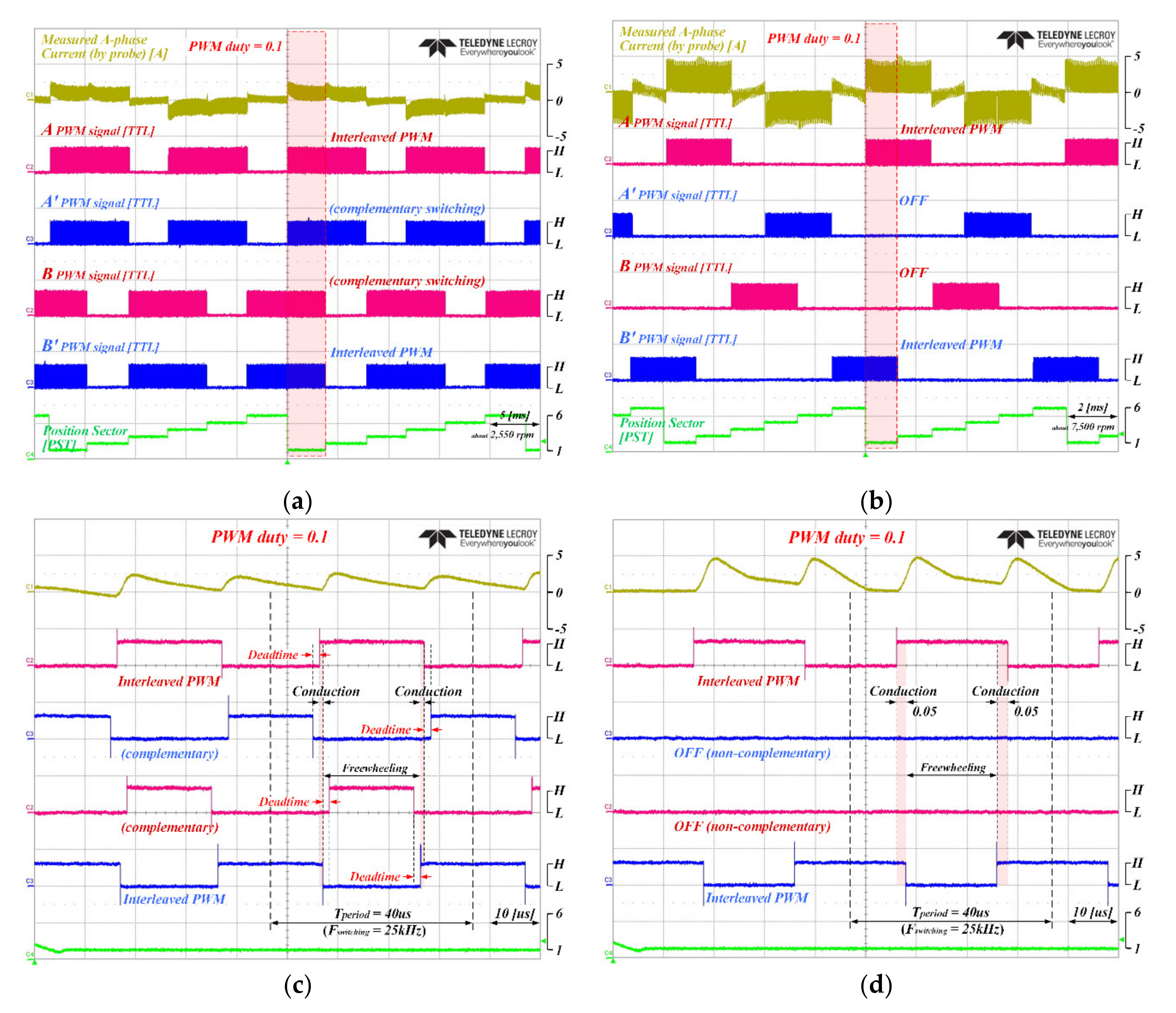
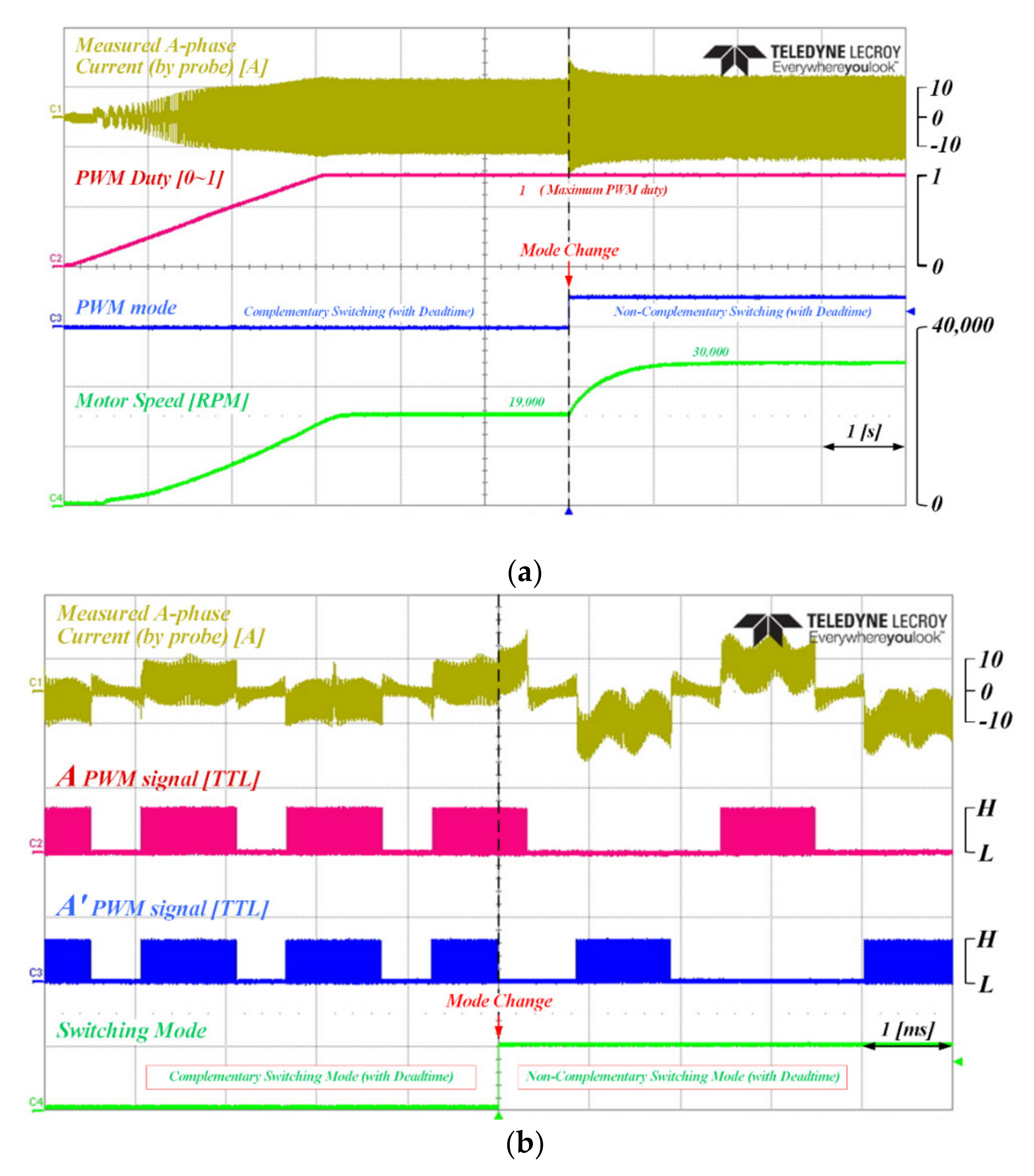
4. Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lee, W.; Schubert, E.; Li, Y.; Li, S.; Bobba, D.; Sarlioglu, B. Overview of electric turbocharger and supercharger for downsized internal combustion engines. IEEE Trans. Transp. Electrif. 2017, 3, 36–47. [Google Scholar] [CrossRef]
- Lequesne, B. Automotive electrification: The nonhybrid story. IEEE Trans. Transp. Electrif. 2015, 1, 40–53. [Google Scholar] [CrossRef]
- Johneric, L. Automotive 48-volt technology: Chapter 4. 48-volt electrification enabling vehicle efficiency. SAE Int. 2016, 16–18. [Google Scholar] [CrossRef]
- Moghaddam, R.R. High speed operation of electrical machines, a review on technology, benefits and challenges. In Proceedings of the IEEE ECCE 2014, Pittsburgh, PA, USA, 14–18 September 2014. [Google Scholar]
- Gerada, D.; Mebarki, A.; Brown, N.L.; Gerada, C.; Cavagnino, A.; Boglietti, A. High speed electrical machines: Technologies, trends and developments. IEEE Trans. Ind. Electron. 2014, 61, 2946–2959. [Google Scholar] [CrossRef]
- Tavernier, S.; Equoy, S. Design and characterization of an E-booster driven by an high speed brushless DC motor. SAE Int. J. Passenger Cars-Electron. Elect. Syst. 2013, 6, 360–365. [Google Scholar] [CrossRef]
- Pillay, P.; Krishnan, R. Application characteristics of permanent magnet synchronous and brushless dc motors for servo drives. IEEE Trans. Ind. Appl. 1991, 27, 986–996. [Google Scholar] [CrossRef]
- Zhao, N.; Schofield, N.; Yang, R.; Gu, R. Investigation of DC-link voltage and temperature variations on EV traction system design. IEEE Trans. Ind. Appl. 2017, 53, 3707–3718. [Google Scholar] [CrossRef]
- Choi, M.-E.; Lee, J.-S.; Seo, S.-W. Real-time optimization for power management systems of a battery/ supercapacitor hybrid energy storage system in electric vehicles. IEEE Trans. Vehicular Technol. 2014, 63, 3600–3611. [Google Scholar] [CrossRef]
- Van der Geest, M.; Polinder, H.; Ferreira, J.A.; Christmann, M. Power density limits and design trends of high-speed permanent magnet synchronous machines. IEEE Trans. Transp. Electrif. 2015, 1, 266–276. [Google Scholar] [CrossRef]
- Zwyssig, C.; Round, S.D.; Kolar, J.W. An ultrahigh-speed, low power electrical drive system. IEEE Trans. Ind. Electron. 2008, 55, 577–585. [Google Scholar] [CrossRef]
- Fakham, H.; Djemai, M.; Busawon, K. Design and practical implementation of a back-emf sliding-mode observer for a brushless dc motor. IET Electric Power Appl. 2008, 2, 353–361. [Google Scholar] [CrossRef]
- Kim, S.-I.; Lee, G.-H.; Hong, J.-P.; Jung, T.-U. Design process of interior PM synchronous motor for 42-V electric air-conditioner system in hybrid electric vehicle. IEEE Trans. Magn. 2008, 44, 1590–1593. [Google Scholar]
- Pillay, P.; Krishnan, R. Modeling, simulation, and analysis of permanent-magnet motor drive, Part II: The brushless DC motor drive. IEEE Trans. Ind. Appl. 1989, 25, 274–279. [Google Scholar] [CrossRef]
- Wang, J.; Chen, C.; Chorian, S.; Huang, Y. Auxiliary power supply for hybrid electric vehicles. In Proceedings of the IEEE PESC, Orlando, FL, USA, 17–21 June 2007. [Google Scholar]
- Evzelman, M.; Rehman, M.M.; Hathaway, K.; Zane, R.; Costinett, D.; Maksimovic, D. Active balancing system for electric vehicles with incorporated low-voltage bus. IEEE Trans. Power Electron. 2016, 31, 7887–7895. [Google Scholar] [CrossRef]
- Tani, A.; Camara, M.B.; Dakyo, B.; Azzouz, Y. DC/DC and DC/AC converters control for hybrid electric vehicles energy management-ultracapacitors and fuel cell. IEEE Trans. Ind. Inform. 2013, 9, 686–696. [Google Scholar] [CrossRef]
- Hegazy, O.; Barrero, R.; Van Mierlo, J.; Lataire, P.; Omar, N.; Coosemans, T. An advanced power electronics interface for electric vehicles applications. IEEE Trans. Power Electron. 2013, 28, 5508–5521. [Google Scholar] [CrossRef]
- Anun, M.; Ordonez, M.; Zurbriggen, I.G.; Oggier, G.G. Circular switching surface technique: High-performance constant power load stabilization for electric vehicle systems. IEEE Trans. Power Electron. 2015, 30, 4560–4572. [Google Scholar] [CrossRef]
- Camara, M.B.; Gualous, H.; Gustin, F.; Berthon, A.; Dakyo, B. DC/DC converter design for supercapacitor and battery power management in hybrid vehicle applications—Polynomial control strategy. IEEE Trans. Ind. Electron. 2010, 57, 587–597. [Google Scholar] [CrossRef]
- Thounthong, P.; Chunkag, V.; Sethakul, P.; Davat, B.; Hinaje, M. Comparative study of fuel-cell vehicle hybridization with battery or supercapacitor storage device. IEEE Trans. Vehicular Technol. 2009, 58, 3892–3904. [Google Scholar] [CrossRef]
- Chen, G.; Deng, Y.; Dong, J.; Hu, Y.; Jiang, L.; He, X. Integrated multiple-output synchronous buck converter for electric vehicle power supply. IEEE Trans. Vehicular Technol. 2017, 66, 5752–5761. [Google Scholar] [CrossRef]
- Elevich, L.N. 3-Phase BLDC Motor Control with Hall Sensors Using56800/E Digital Signal Controllers; Application Note, Freescale Semiconductor Inc.: Austin, TX, USA, 2005. [Google Scholar]
- Song, K.Y.; Jin, Y.S.; Kim, H.W.; Cho, K.Y.; Han, B.M. Position control of BLDC motor with modified bipolar PWM for clutch system of PHEV. In Proceedings of the IEEE ECCE Asia Downunder, Melbourne, Australia, 3–6 June 2013. [Google Scholar]
- Sathyan, A.; Milivojevic, N.; Lee, Y.-J.; Krishnamurthy, M.; Emadi, A. An FPGA-based novel digital PWM control scheme for BLDC motor drives. IEEE Trans. Ind. Electron. 2009, 56, 3040–3049. [Google Scholar] [CrossRef]
- Rodriguez, F.; Emadi, A. A novel digital control technique for brushless DC motor drives. IEEE Trans. Ind. Electron. 2007, 54, 2365–2373. [Google Scholar] [CrossRef]
- Joice, C.S.; Paranjothi, S.R.; Kumar, V.J.S. Digital control strategy for four quadrant operation of three phase BLDC motor with load variations. IEEE Trans. Ind. Inform. 2013, 9, 974–982. [Google Scholar] [CrossRef]
- Yang, M.-J.; Jhou, H.-L.; Ma, B.-Y.; Shyu, K.-K. A cost-effective method of electric brake with energy regeneration for electric vehicles. IEEE Trans. Ind. Electron. 2009, 56, 2203–2212. [Google Scholar] [CrossRef]
- Lai, Y.-S.; Lin, Y.-K. Quicken the pulse. IEEE Ind. Appl. Mag. 2008, 14, 34–44. [Google Scholar] [CrossRef]
- Li, Q.; Huang, H.; Yin, B. The study of PWM methods in permanent magnet brushless DC motor speed control system. In Proceedings of the Int. Conf. on Elect. Mach. and Syst, Wuhan, China, 17–20 October 2008. [Google Scholar]
- Valle, R.L.; Almeida, P.M.; Ferreira, A.A.; Barbosa, P.G. Unipolar PWM predictive current-mode control of a variable-speed low inductance BLDC motor drive. IET Electric Power Appl. 2017, 11, 688–696. [Google Scholar] [CrossRef]
- Pindoriya, R.M.; Mishra, A.K.; Rajpurohit, B.S.; Kumar, R. An analysis of vibration and acoustic noise of BLDC motor drive. In Proceedings of the IEEE PESGM, Portland, OR, USA, 5–10 August 2018. [Google Scholar]
- Baszynski, M.; Pirog, S. Unipolar modulation for a BLDC motor with simultaneously switching of two transistors with closed loop control for four-quadrant operation. IEEE Trans. Ind. Inform. 2018, 14, 146–155. [Google Scholar] [CrossRef]
- Kim, H.W.; Shin, H.K.; Mok, H.S.; Lee, Y.K.; Cho, K.Y. Novel PWM method with low ripple current for position control applications of BLDC motors. J. Power Electron. 2011, 11, 726–733. [Google Scholar] [CrossRef]
- Park, S.J.; Park, H.W.; Lee, M.H.; Harashima, F. A new approach for minimum-torque-ripple maximum-efficiency control of BLDC motors. IEEE Trans. Ind. Electron. 2000, 47, 109–114. [Google Scholar] [CrossRef]
- Choi, J.-W.; Sul, S.-K. Inverter output voltage synthesis using novel dead time compensation. IEEE Trans. Power Electron. 1996, 11, 221–227. [Google Scholar] [CrossRef]
- Zhao, Y.; Qiao, W.; Wu, L. Dead-time effect analysis and compensation for a sliding-mode position observer-based sensorless IPMSM control system. IEEE Trans. Ind. Appl. 2015, 51, 2528–2535. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PWM Type | Unipolar PWM | Bipolar PWM | H-PWM-L-PWM | |
|---|---|---|---|---|
| Switching mode | non-complementary | complementary | complementary | non-complementary |
| Dead time | not used | used | used | not used |
| Ratio of voltage fluctuation between PWM ON and OFF | 1 | 2 | 1 | |
| Number of conduction (per one switching period) | 1 | 1 | 2 | |
| Ratio of phase current ripple amplitude | 1 | 2 | 0.5 | |
| Four-quadrant operation and regenerative braking | impossible | possible | possible | impossible |
| Maximum voltage utilization rate (Equation (2)) | 1 | 1 − Td × fsw | 0.5 − Td × fsw | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.-J.; Park, H.-S.; Kim, J.-M. Expansion of Operating Speed Range of High-Speed BLDC Motor Using Hybrid PWM Switching Method Considering Dead Time. Energies 2020, 13, 5212. https://doi.org/10.3390/en13195212
Kim H-J, Park H-S, Kim J-M. Expansion of Operating Speed Range of High-Speed BLDC Motor Using Hybrid PWM Switching Method Considering Dead Time. Energies. 2020; 13(19):5212. https://doi.org/10.3390/en13195212
Chicago/Turabian StyleKim, Ho-Jin, Hyung-Seok Park, and Jang-Mok Kim. 2020. "Expansion of Operating Speed Range of High-Speed BLDC Motor Using Hybrid PWM Switching Method Considering Dead Time" Energies 13, no. 19: 5212. https://doi.org/10.3390/en13195212
APA StyleKim, H.-J., Park, H.-S., & Kim, J.-M. (2020). Expansion of Operating Speed Range of High-Speed BLDC Motor Using Hybrid PWM Switching Method Considering Dead Time. Energies, 13(19), 5212. https://doi.org/10.3390/en13195212