A Novel Fault Location Method of a 35-kV High-Reliability Distribution Network Using Wavelet Filter-S Transform


Abstract
1. Introduction
2. Principle of Fault Location for a 35-kV High-Reliability Distribution Network
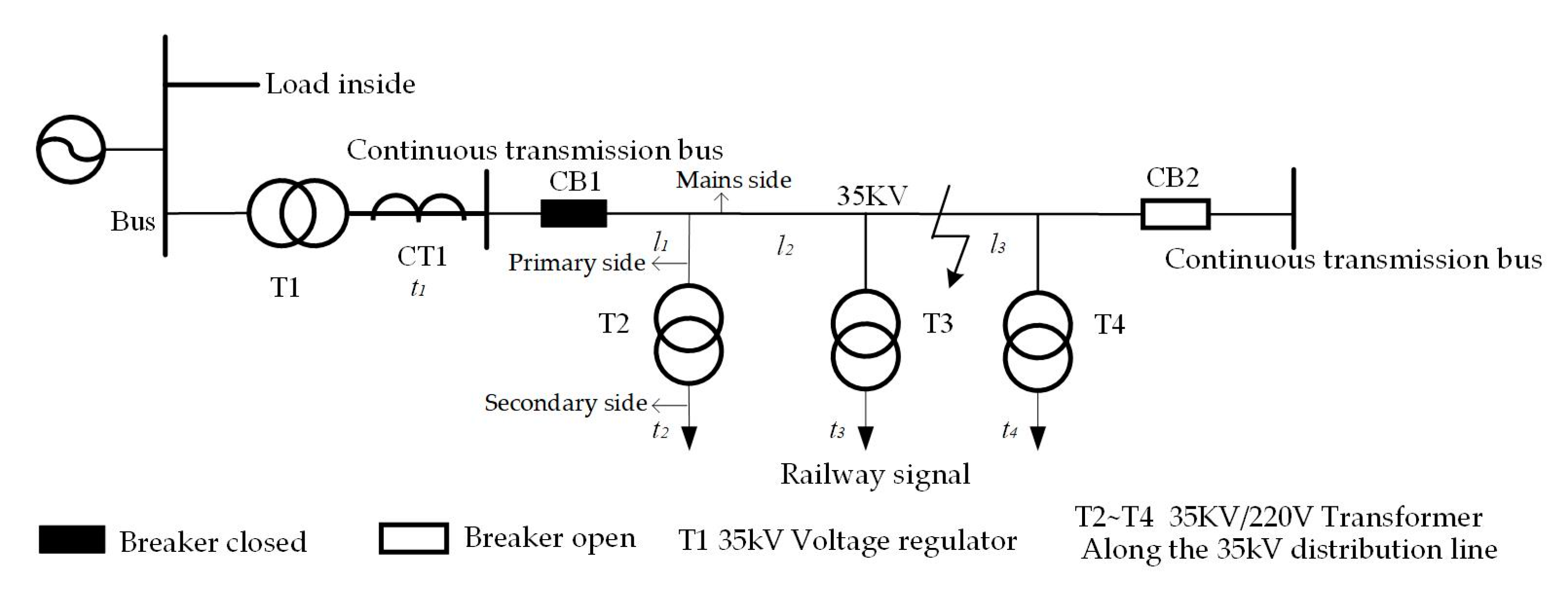
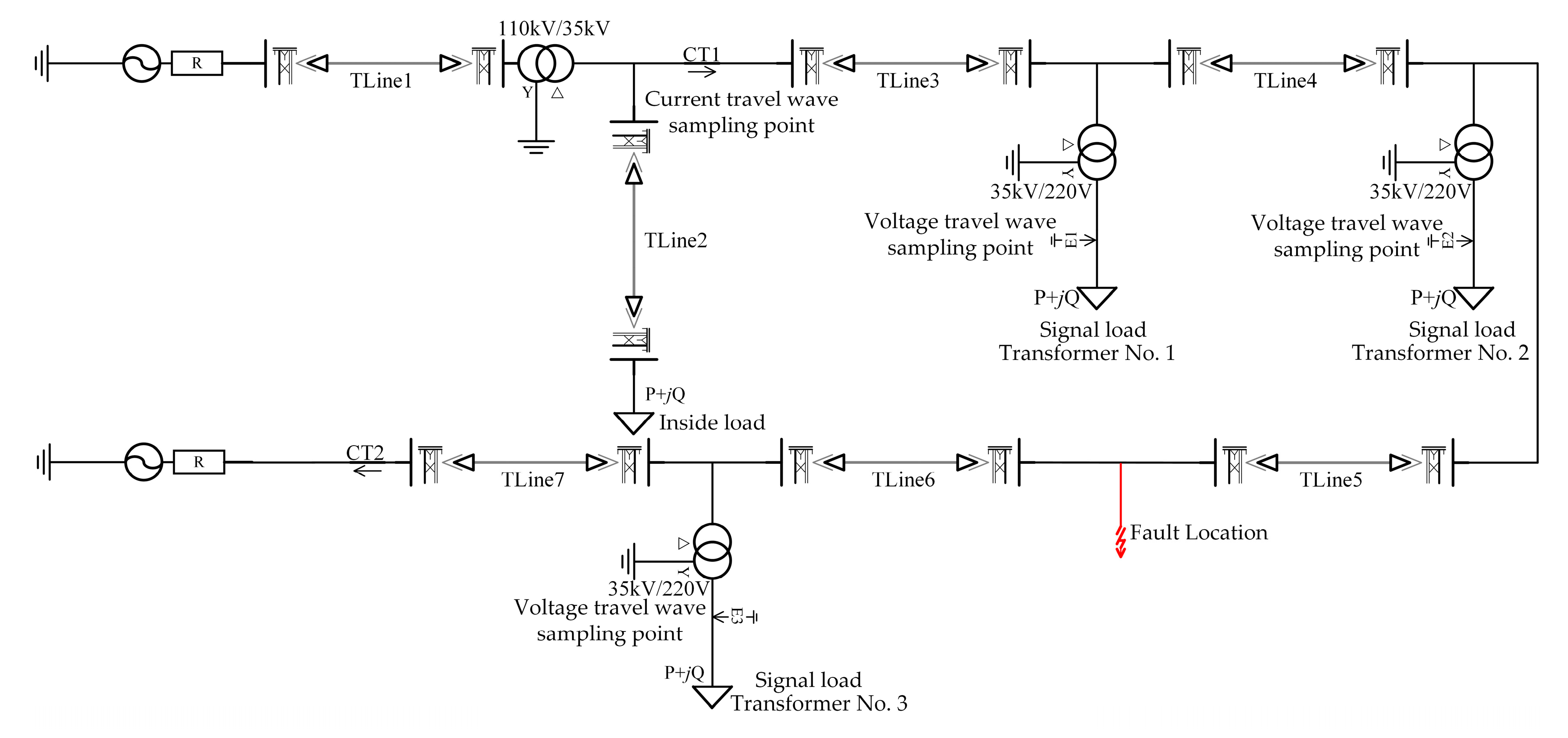
2.1. Structures of 35-kV High-Reliability Distribution Network
2.2. Principle Simulation of Double-Ended Location
2.3. Model of Distributed Multi-Point Location
2.4. Analog–Digital Conversion and Noise Interference
2.4.1. Frequency and Bits of Analog–Digital Conversion
2.4.2. Noise Interference
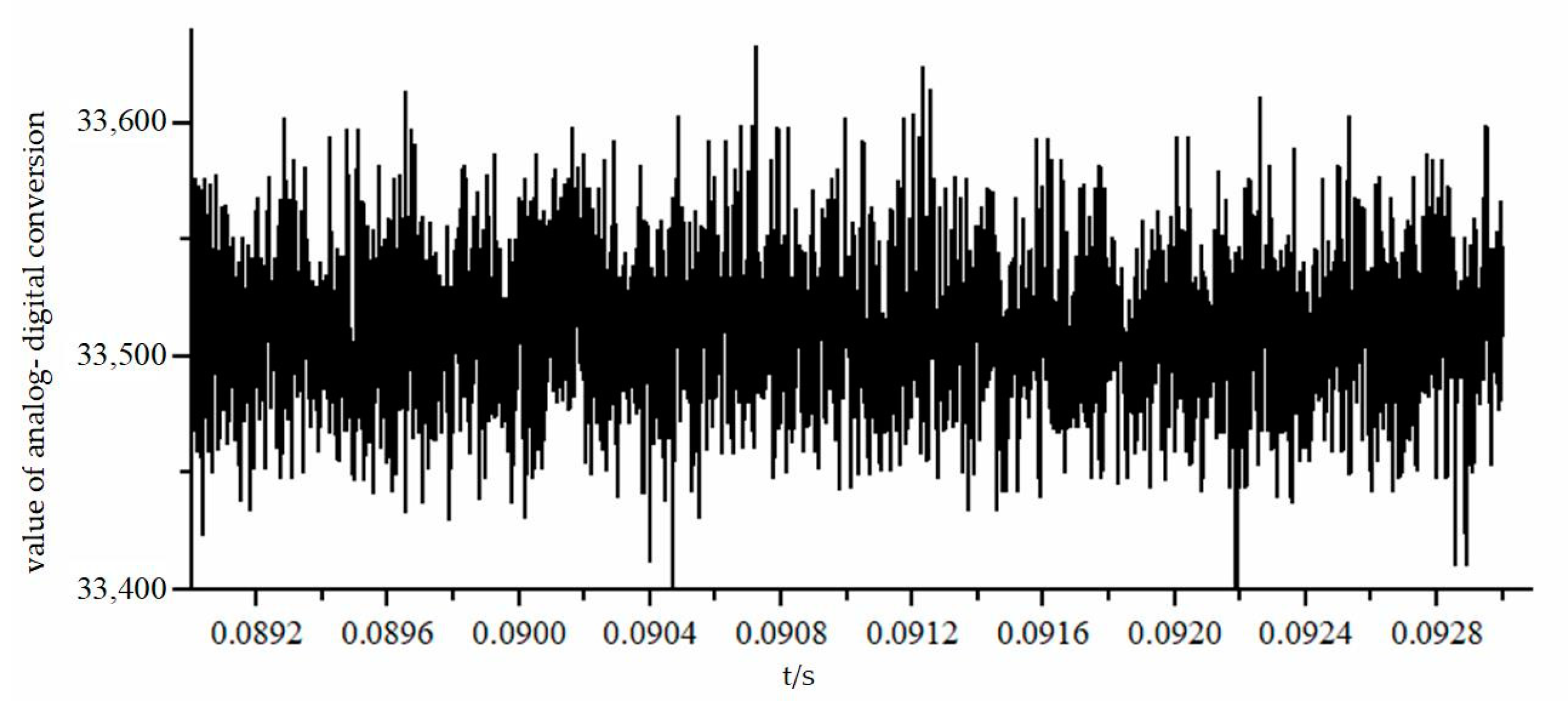
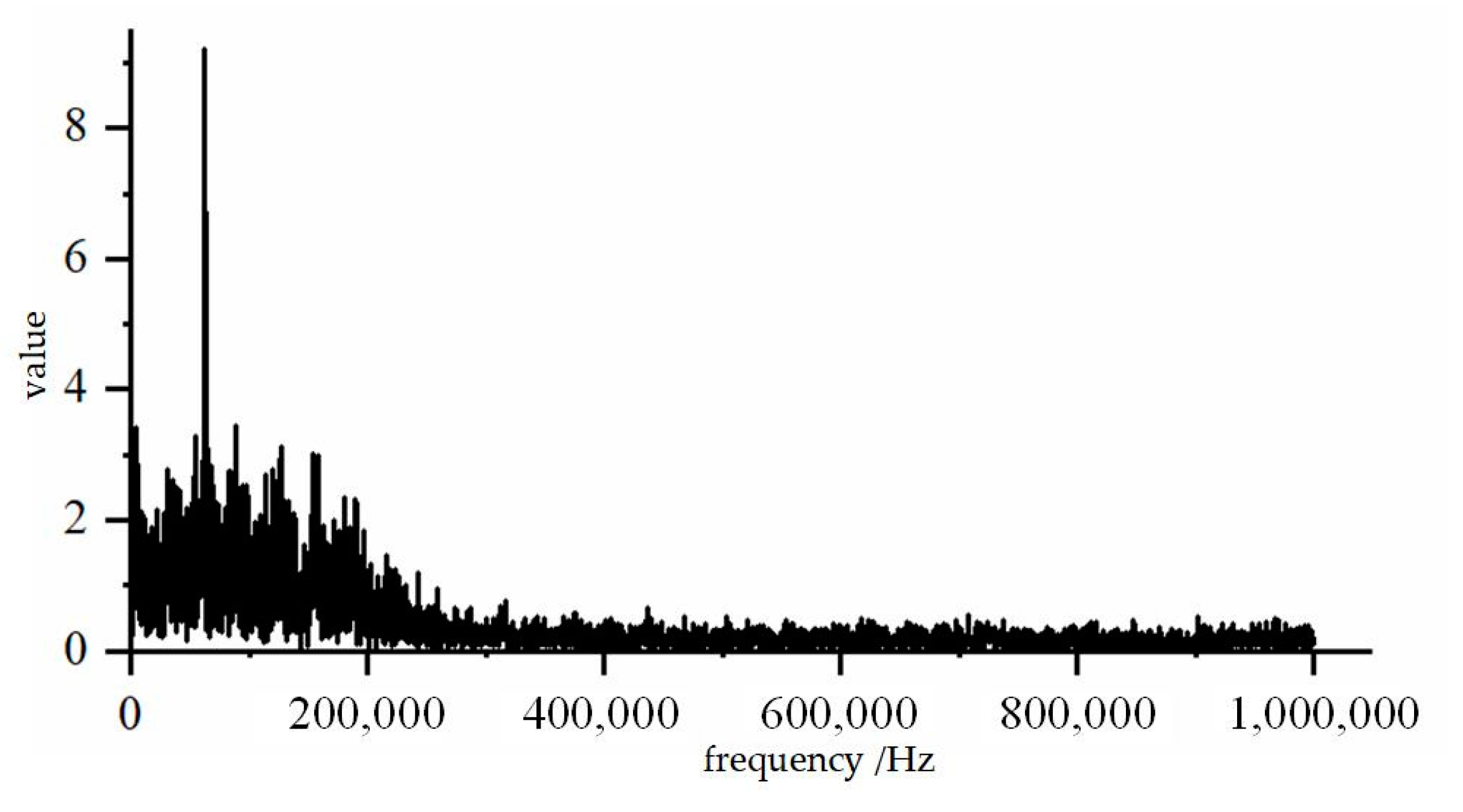
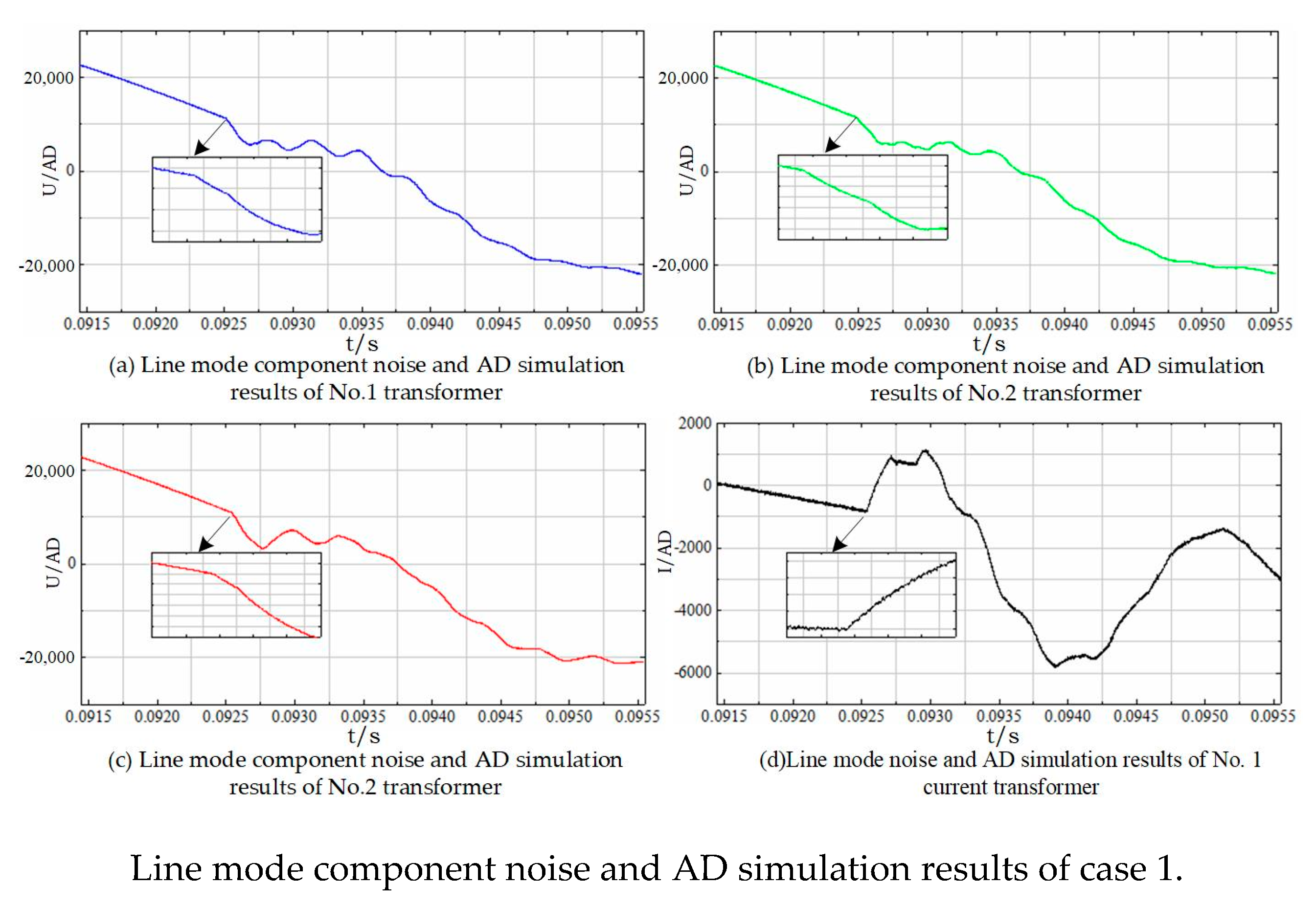
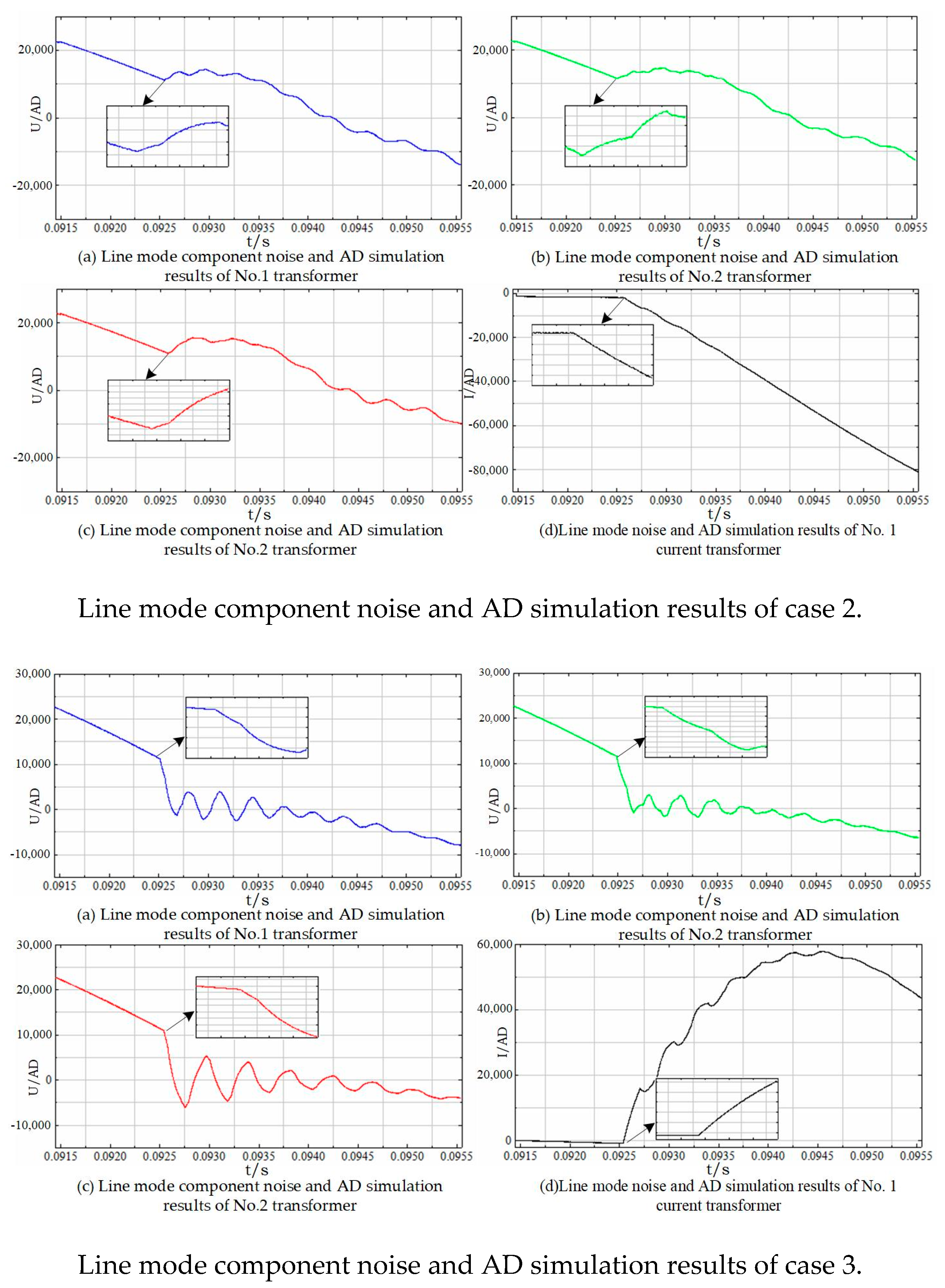
2.4.3. Simulation of Analog–Digital Conversion and Noise Interference
3. Calibration of Traveling Wave Arrival Time Based on Wavelet Filter-S Transform
3.1. Wavelet Filter
3.2. Model of S Transform
3.3. Steps of Fault Location
- (1)
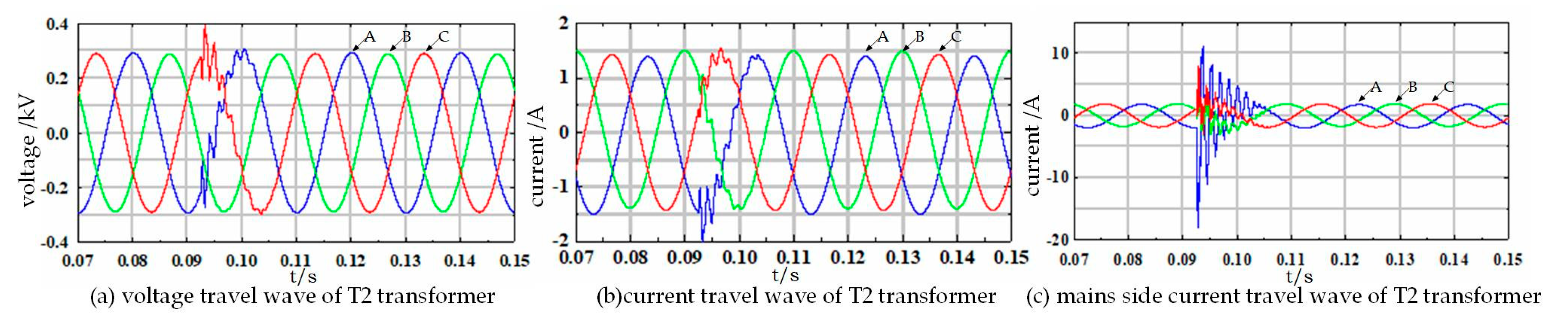
- Simulation model of 35-kV high-reliability distribution network was established to collect the voltage and current traveling wave signals. Then, a total of 4 ms traveling wave data was stored for fault location. The three-phase voltage and current traveling waves were converted based on Equations (5) and (6) and mixed in noise.
- (2)
- (3)
- The line modulus component obtained by the Karen Bell transform was used for the wavelet filter. The wavelet filter was based on the threshold denoising method, and the threshold was determined by the general threshold method.
- (4)
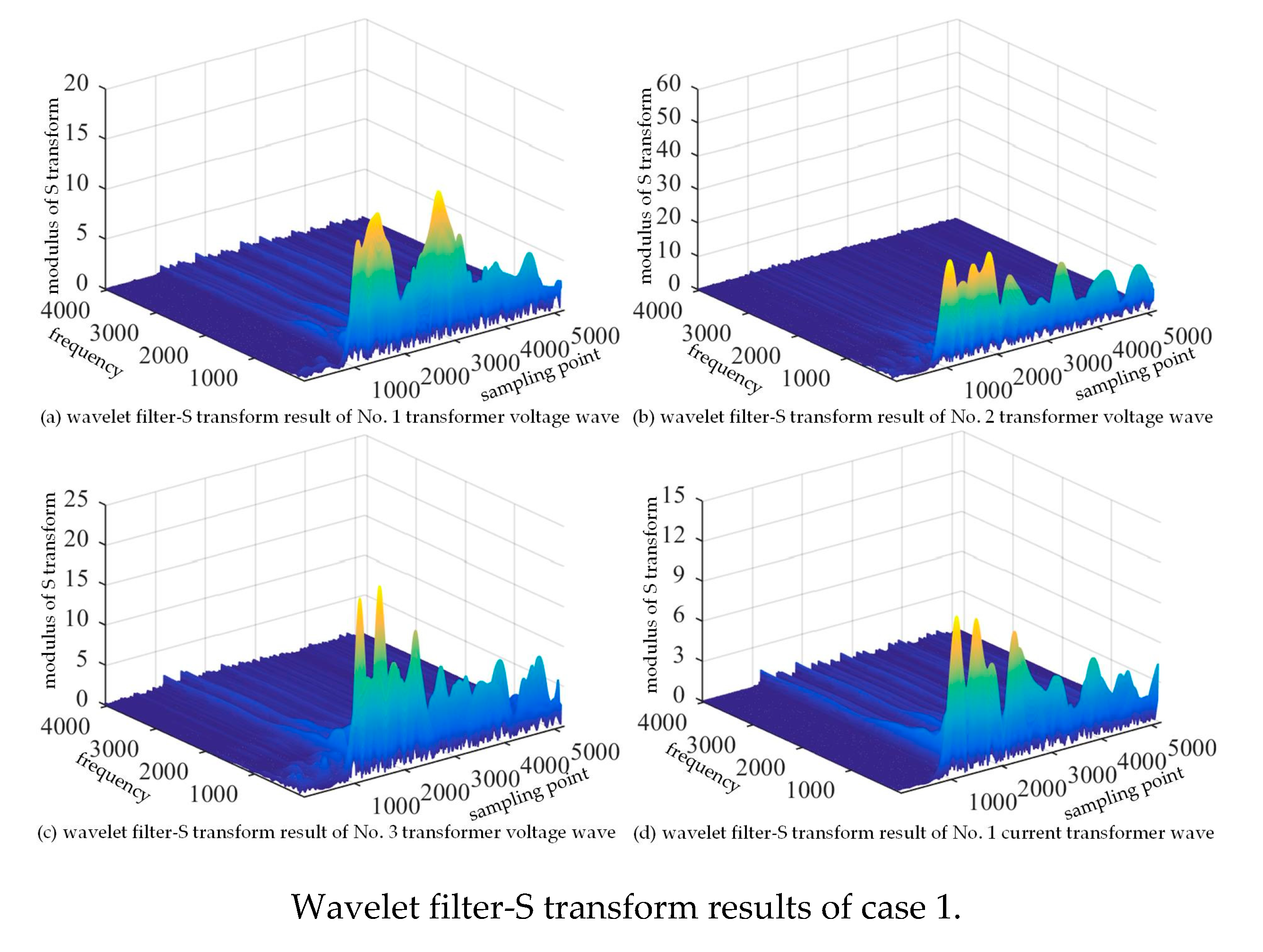
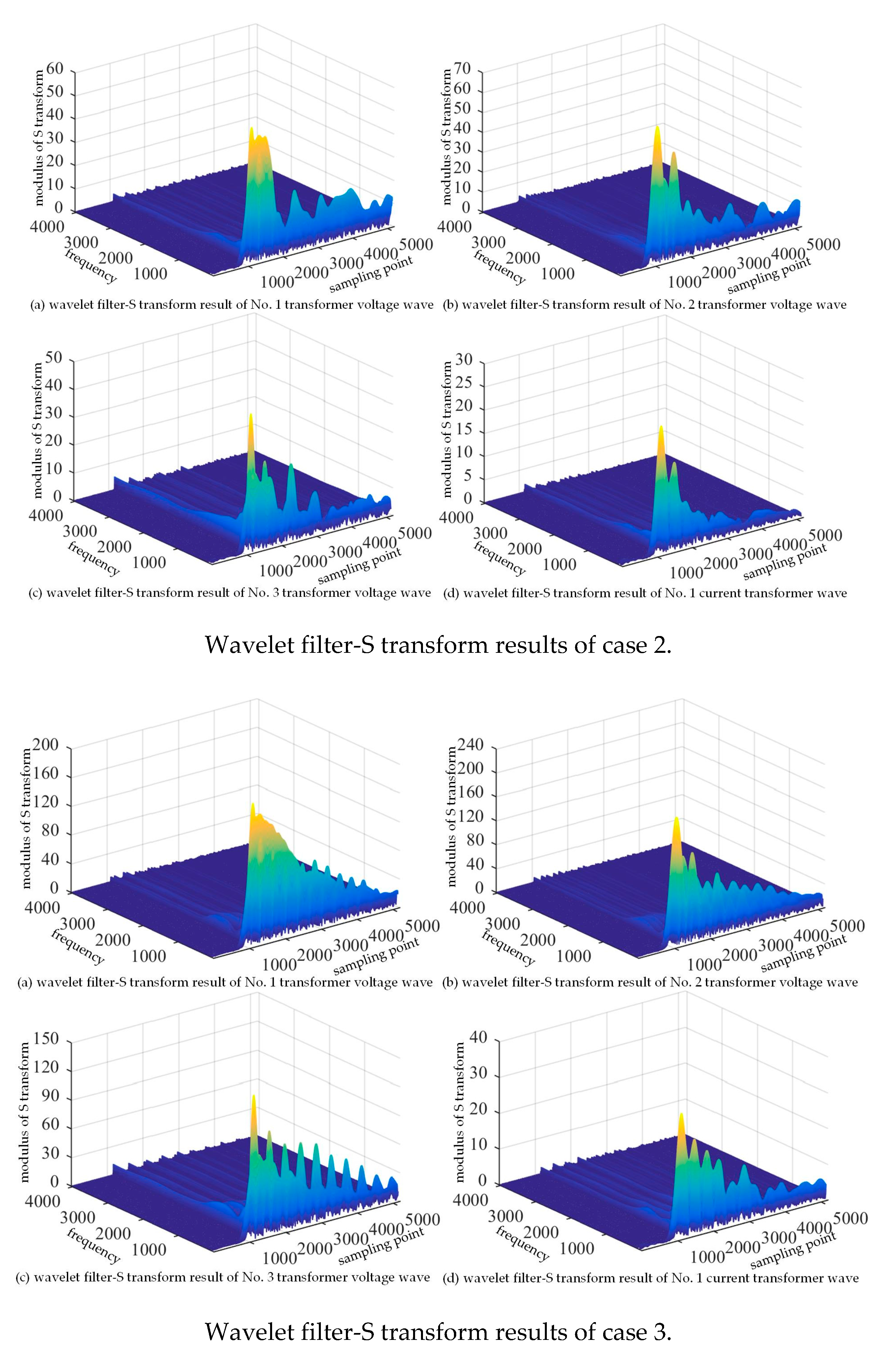
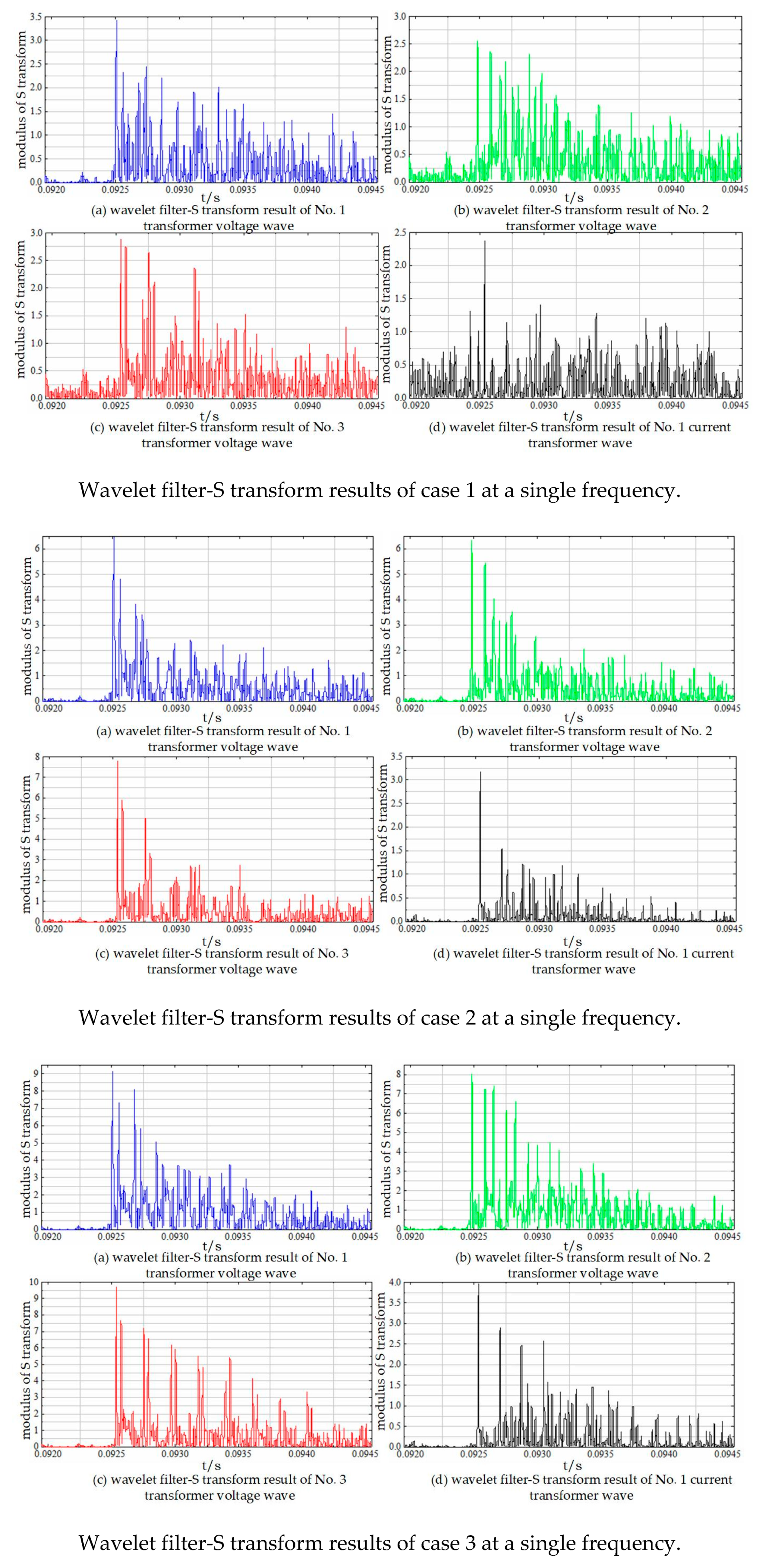
- The result of the wavelet filter was used as the original data of S transform. The S modulus matrix in the range of approximately 10–100 kHz was obtained. The maximum modulus at different frequencies were defined. The corresponding moments of unique modulus maximum were used as the arrival time of the traveling wave.
- (5)
- The arrival time of the traveling wave was collected by each 35-KV/220 V low-voltage transformer and the line head CT. The fault location was defined based on the double-ended location principle and the distributed multi-point location model.
4. Simulation Results
4.1. Simulation Model and Parameters
4.2. Result Analysis
4.2.1. Analysis of Different Fault Conditions
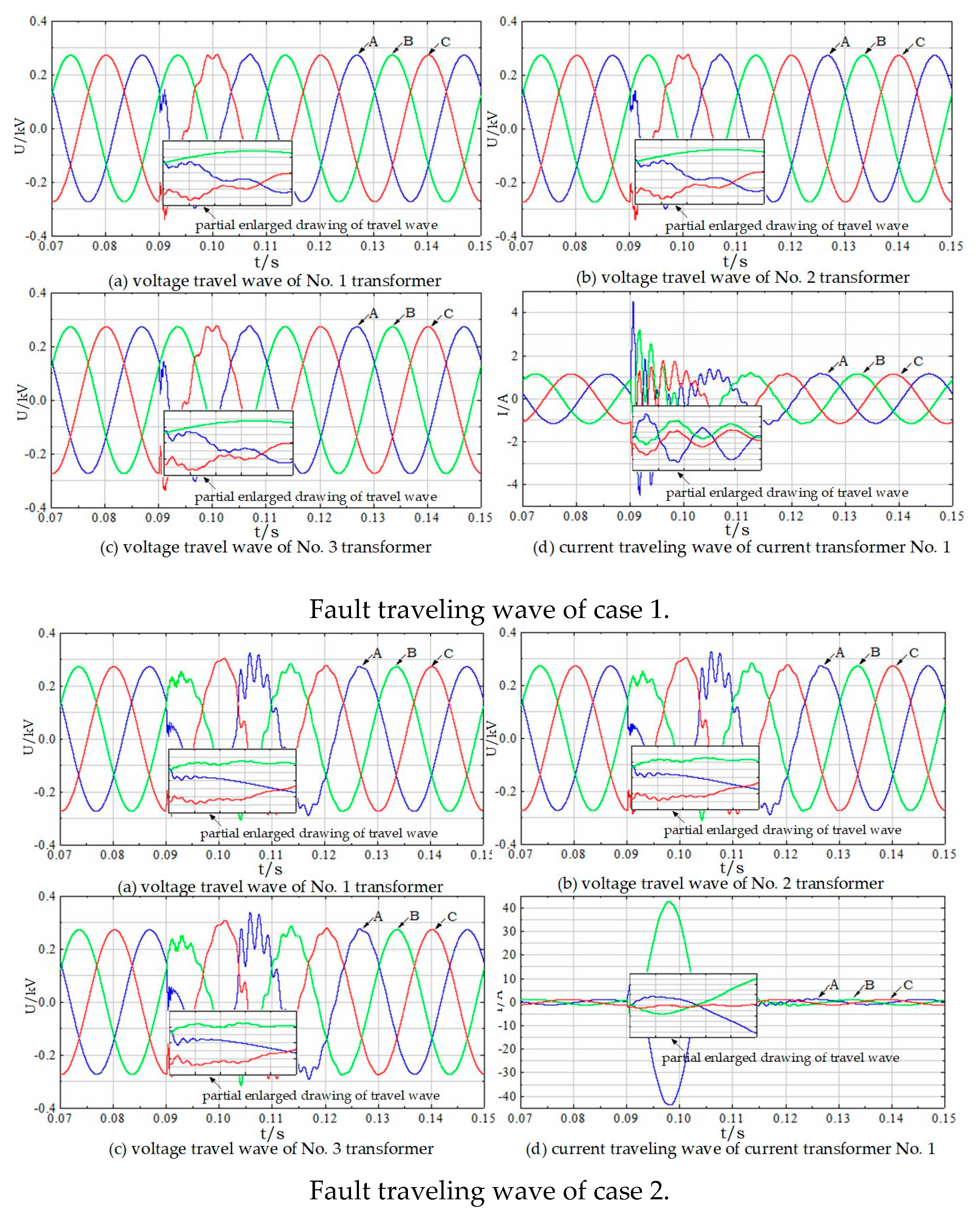
- (1)
- Case 1: Phase A is grounded through 100 Ω transition resistance. Single-phase grounding faults are the most frequent type of fault in the power system. The fault traveling wave characteristics are not obvious, which makes it difficult to calibrate the arrival time of the traveling wave.
- (2)
- Case 2: AB two-phase short circuit is grounded through 100 Ω transition resistance.
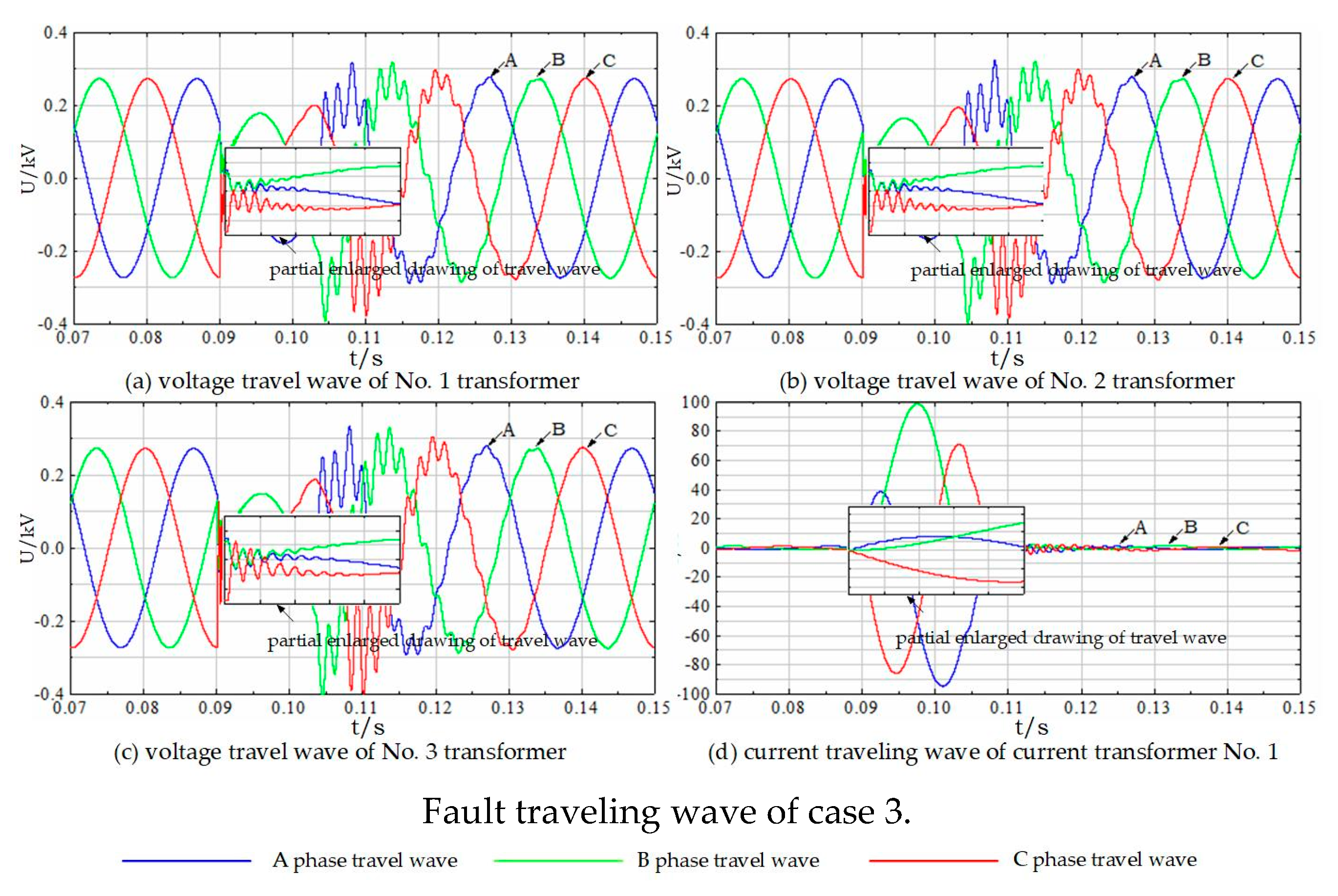
- (3)
- Case 3: Three-phase ABC short circuit.
4.2.2. Comparison of Multiple Ranging Methods
- (1)
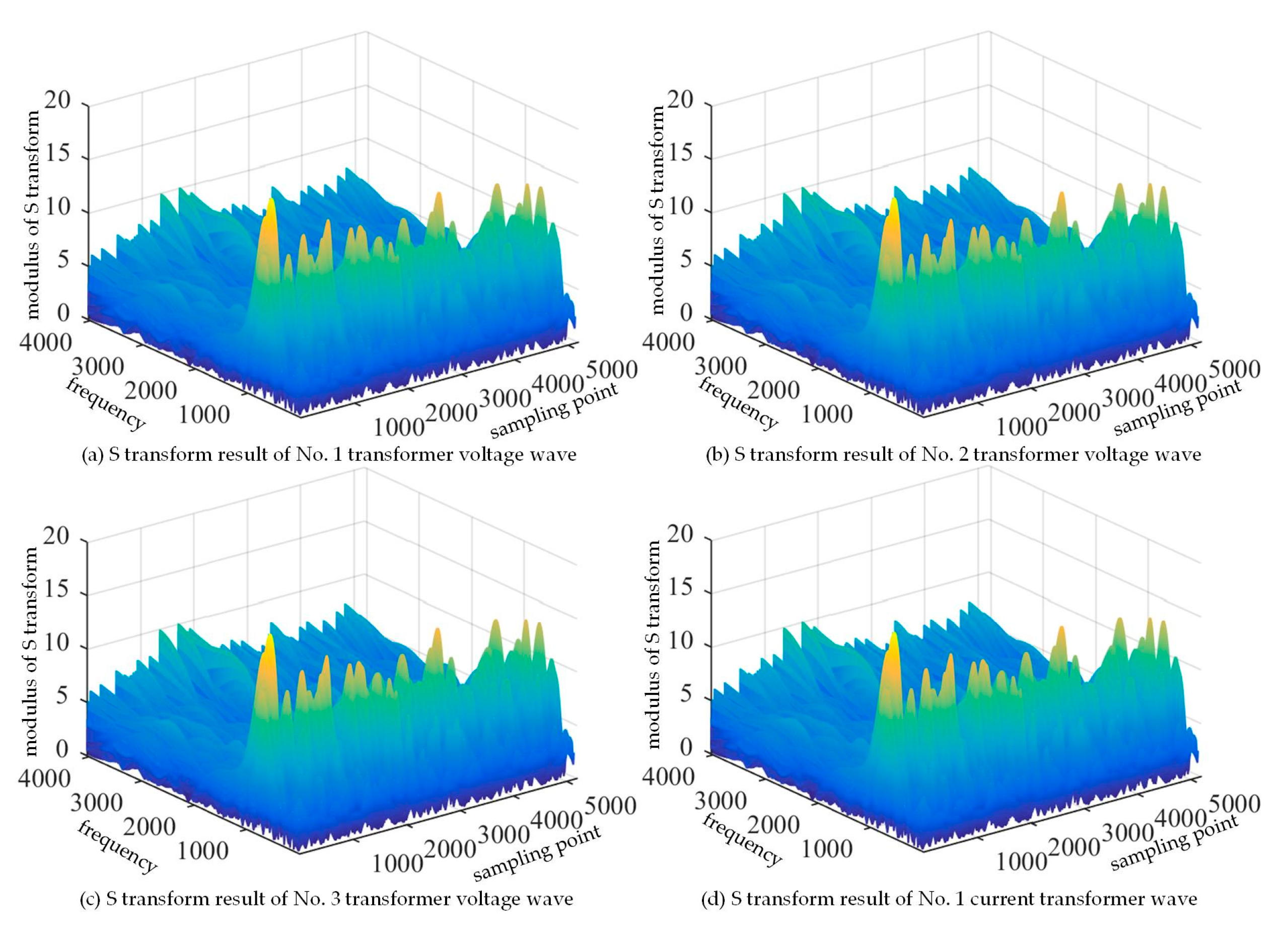
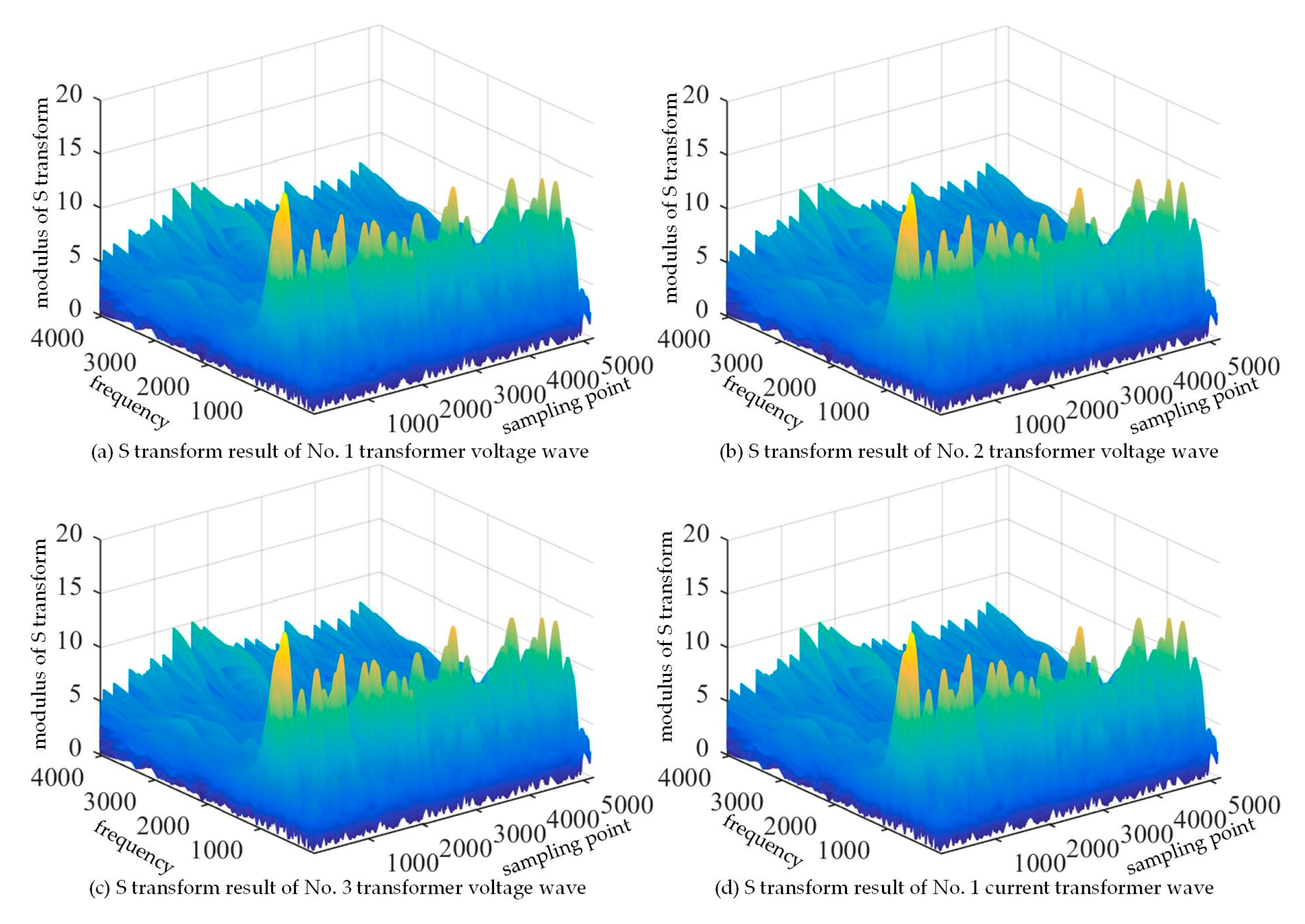
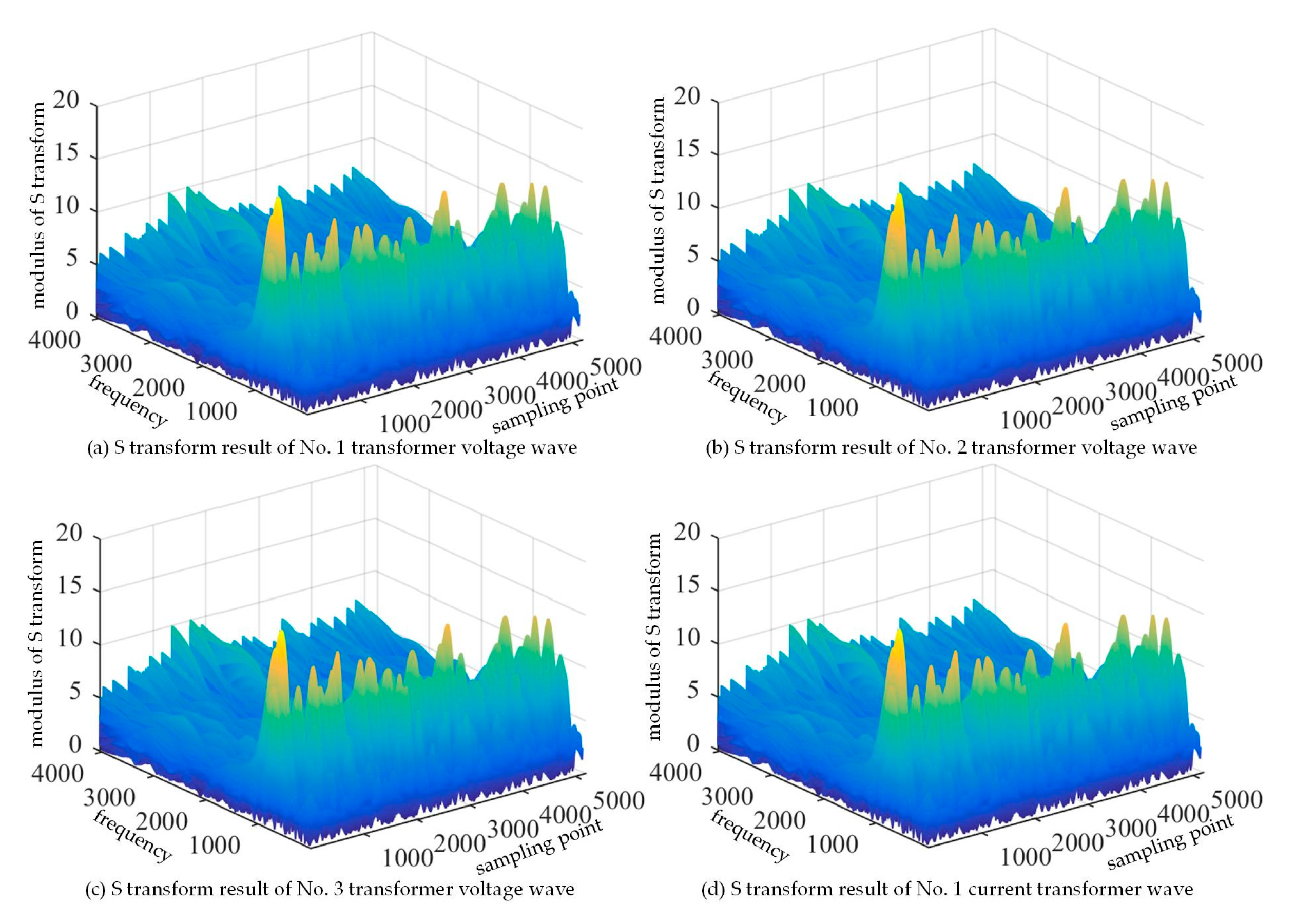
- Method 1. Only S transform was used to obtain the fault traveling wave S-mode matrix. The arrival time of the traveling wave was determined according to the frequency range and the principle of modulus maximum [29]. The single S transformation results of the above three failure conditions are shown in Figure A1, Figure A2 and Figure A3 in the Appendix A. Due to the end effect, the S transform results at the head and tail were abnormally high. Therefore, the data at the head and tail were ignored in the S transform result. Only the middle part was used for arrival time calibration.From the Figure A1, Figure A2 and Figure A3 in the Appendix A, it was seen that the maximum value of the voltage traveling wave and the current traveling wave were the same. It was impossible to distinguish the time difference of the fault travel when waves reach different sampling points. The main reason was that the analog–digital conversion weakens the singular characteristics of the fault traveling wave. The change caused by the line fault was covered by the noise signal. The modulus maximum point no longer corresponds to the arrival time of fault traveling wave. The accuracy of method 1 is shown in Table 3 under the mentioned three kinds of fault conditions.
- (2)
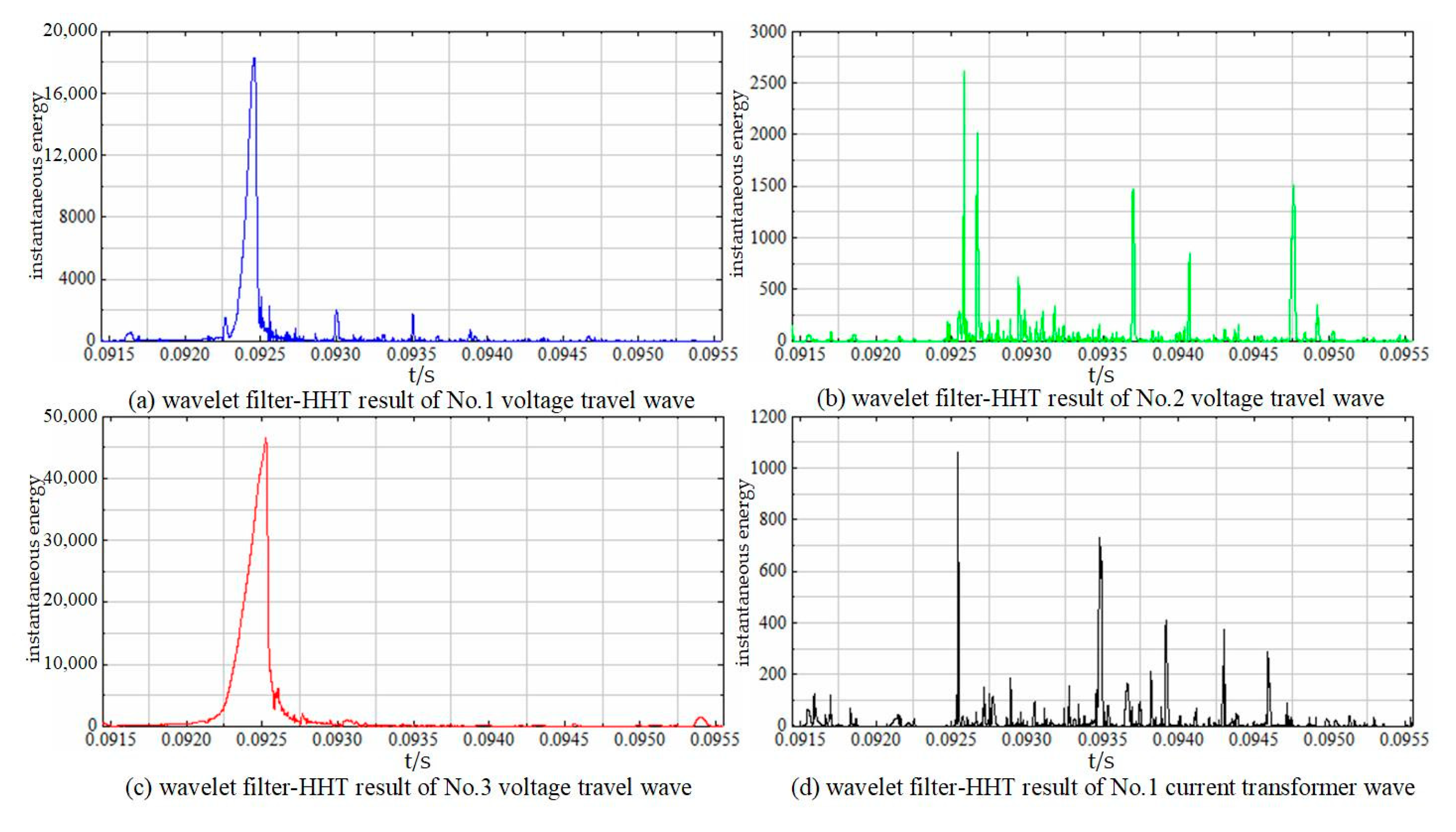
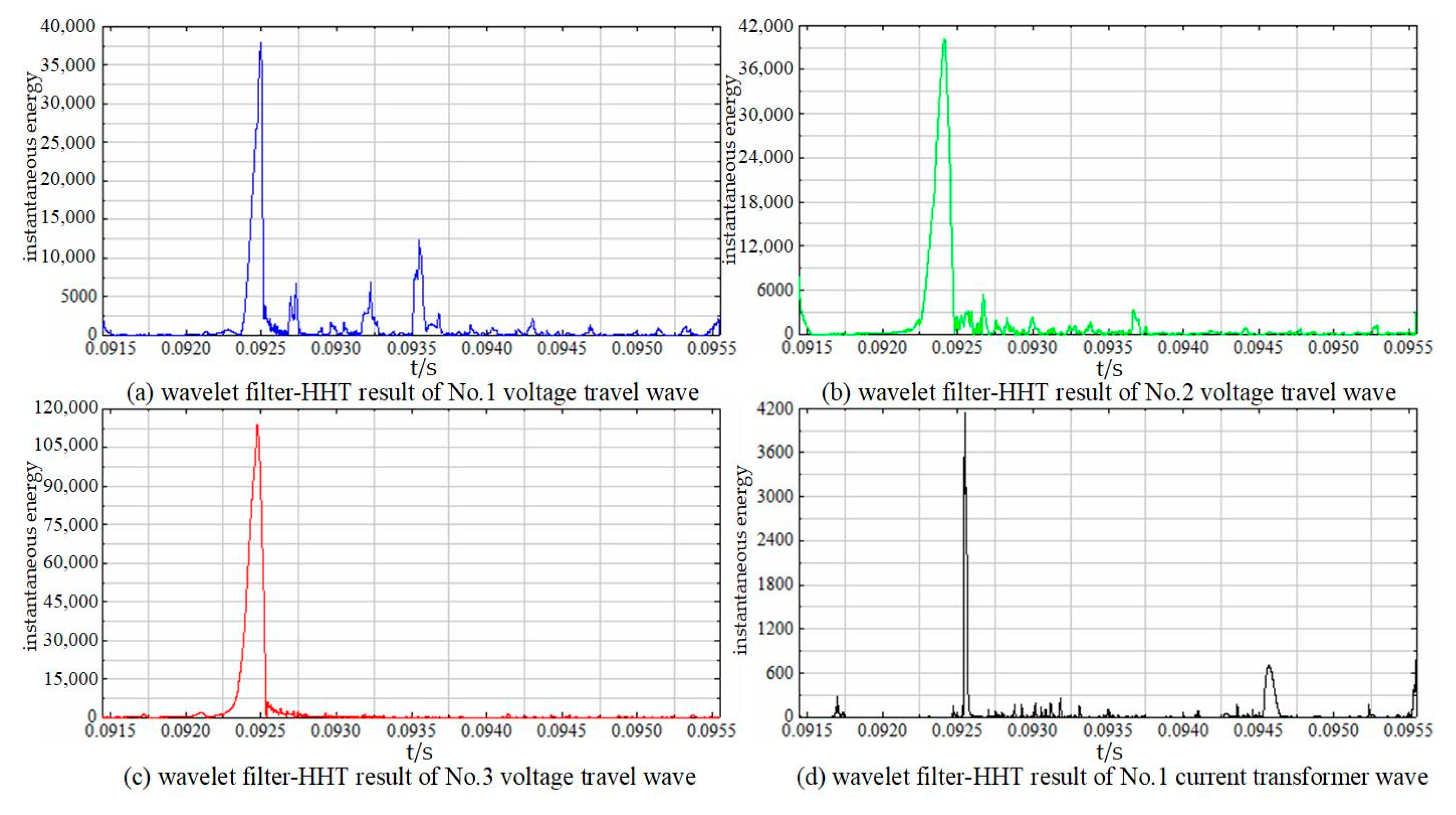
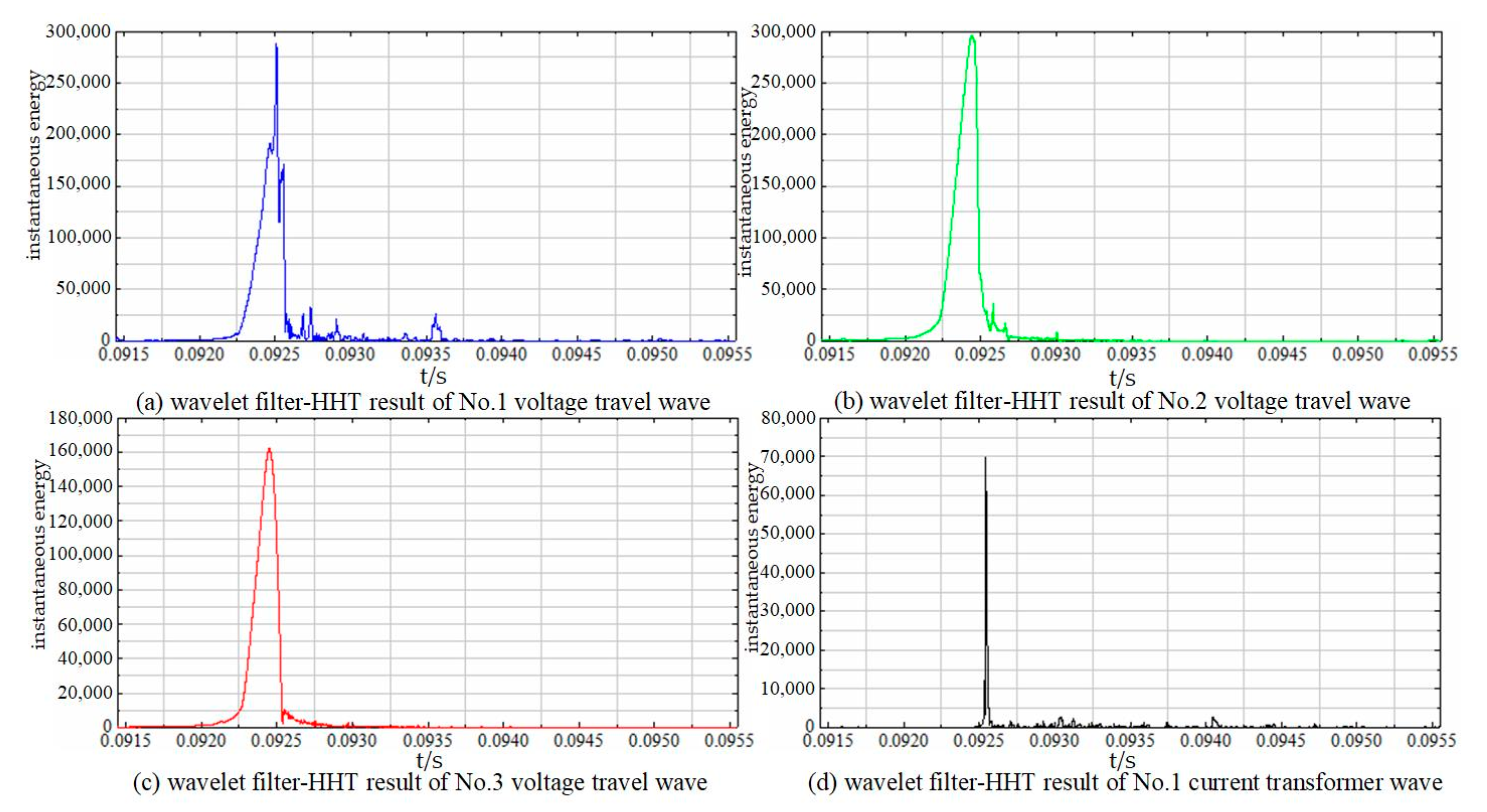
- Method 2. The wavelet filter method was combined with the HHT method mentioned in the literature [7]. The data after wavelet filter was subjected to empirical mode decomposition (EMD). The high-frequency intrinsic mode function component IMF1 was used for the Hilbert–Huang Transform to obtain instantaneous energy. The maximum instantaneous energy corresponded to the arrival time of the traveling wave [7]. The HHT results of the above three fault conditions are shown in Figure A4, Figure A5 and Figure A6 in the Appendix A.It can be seen from Figure A4, Figure A5 and Figure A6 in the Appendix A that both the voltage and current traveling waves have obvious instantaneous energy maximum. The current traveling waves were collected at the head of the line, where the instantaneous energy changes the most. The maximum instantaneous energy point corresponded to the arrival time of the traveling wave. Based on the distributed multi-point location model, the non-faulty line was used to calculate the wave speed. The location accuracy of different fault conditions is shown in Table 3.
- (3)
- Method 3. The method proposed in this paper was used to define the fault position of the 35-kV high-reliability distribution network. The location accuracy under different fault conditions was analyzed. The results of the method proposed in this paper are shown in Figure 10.
5. Conclusions
- (1)
- Wave speed is calculated based on the actual travel time in a multi-point location model. The method avoids that the traditional calculation method of wave speed only considers the line parameters and fails to analyze the influence of the environment on the wave speed. The location error caused by inaccurate wave speed is reduced.
- (2)
- Analog–digital conversion and noise will weaken the singular characteristics of the line fault traveling wave. The change caused by the line fault might be covered by the noise signal. The single S transform modulus maximum method cannot be used to locate the fault. The method proposed in this paper can effectively reduce the influence of noise on the identification of the traveling wave.
- (3)
- The simulation results show that the method proposed in this paper has high location accuracy under the conditions of single-phase grounding through transition resistance, two-phase short-circuit grounding through transition resistance, and three-phase short-circuit.
Author Contributions
Funding
Conflicts of Interest
Appendix A






References
- State Development and Reform Commission. Action Plan for Construction and Transformation of Distribution Network (2015–2020); The State Development and Reform Commission: Beijing, China, 2017.
- Hong, Y.; Tan, Y.H.; Yi, H.L. New method of single phase-to-ground fault location based on traveling wave in distribution networks. Proc. CSU-EPSA 2017, 29, 14–20. [Google Scholar]
- Hu, M.; Chen, H. Detection and location of power quality disturbances using wavelet transform modulus maxima. Power Syst. Technol. 2001, 25, 12–16. [Google Scholar]
- Han, Z.; Li, S.; Liu, S.; Gao, S. Generalized Fault-Location Scheme for All-Parallel AT Electric Railway System. Energies 2020, 13, 4081. [Google Scholar] [CrossRef]
- Ji, Y.Y.; He, J.H. Application of travelling wave based fault location in 10kV railway automatic blocking and continuous power transmission lines. Power Syst. Technol. 2003, 27, 13–15. [Google Scholar]
- Deng, F.; Li, X.R.; Zeng, X.J. Single-ended traveling-wave-based fault location algorithm for hybrid transmission line based on the full-waveform. Trans. China Electrotech. Soc. 2018, 33, 3471–3482. [Google Scholar]
- Xiong, L.B.; Wu, G.H.; Wang, Z.X. Study on fault location of multi measuring points traveling wave method based on IHHT in all parallel AT traction network. Trans. China Electrotech. Soc. 2019, 35, 3244–3252. [Google Scholar]
- Li, Z.B.; Xu, Y.H.; Wu, B.X. Fault location of high voltage transmission line based on S-transform traveling wave method. Electr. Meas. Instrum. 2014, 51, 40–42. [Google Scholar]
- Qian, J.Q.; Ye, J.Z.; Kuang, Z. A fault location method for multi-terminal transmission network based on S transform. Power Syst. Prot. Control 2014, 42, 82–88. [Google Scholar]
- Xie, L.W.; Liu, Y.X.; Zeng, X.J. Fault Location of Multi-terminal Transmission Lines Based on VMD and S Transform. Proc. CSU-EPSA 2019, 31, 126–134. [Google Scholar]
- Dai, F.; Ye, Y.Y.; Liu, Z.Y. Research on fault location of transmission line based on S-transform and synchronized phasor measurement. Electr. Meas. Instrum. 2020, 57, 13–19, 44. [Google Scholar]
- Pang, Z.J.; Du, J.; Jiang, F.; He, L.; Li, Y.; Qin, L.; Li, Y. A Fault Section Location Method Based on energy Remainder of Generalized S-Transform for Single-phase round Fault of Distribution Networks. In Proceedings of the IEEE Advanced Information Technology, Electronic & Automation Control Conference, Chongqing, China, 12–14 October 2018; pp. 1511–1515. [Google Scholar]
- Wu, Y.Y.; Shu, Q. Algorithm research of S transform in the analysis of fault traveling wave signal in distribution network. Digit. Technol. Appl. 2017, 4, 135–137, 141. [Google Scholar]
- Liu, X.L. Research on common faults and preventive measures of urban distribution network lines. Commun. World 2017, 21, 266–267. [Google Scholar]
- Guo, H.Q. Study on Fault Locating of 10 kV Automatic Blocking and Continuous Transmission Lines of Railway Based on Traveling Wave Method. Master’s Thesis, Shijiazhuang Tiedao University, Shijiazhuang, China, 2019. [Google Scholar]
- Nduwamungu, A.; Ntagwirumugara, E.; Mulolani, F.; Bashir, W. Fault Ride through Capability Analysis (FRT) in Wind Power Plants with Doubly Fed Induction Generators for Smart Grid Technologies. Energies 2020, 13, 4260. [Google Scholar] [CrossRef]
- Liu, X.Q.; Wang, D.Z.; Jiang, X.C. Fault location algorithm for distribution power network based on relationship in time difference of arrival of traveling wave. Proc. CSEE 2017, 37, 4109–4115. (In Chinese) [Google Scholar]
- Zhao, J.X.; Li, J.H.; Chang, Q. Study on GPS timing and frequency calibration method and the test results. J. Beijing Univ. Aeronaut. Astronaut. 2004, 8, 762–766. [Google Scholar]
- Ji, T.; Sun, T.J.; Xu, B.G. Traveling waves measurement with distribution transformers. Autom. Electr. Power Syst. 2006, 16, 66–71. [Google Scholar]
- Zhu, Y.L.; Fan, X.Q.; Yin, J.L. A new fault location scheme for transmission lines based on traveling waves of three measurements. Trans. China Electrotech. Soc. 2012, 27, 260–268. [Google Scholar]
- Wang, Q.J.; Jin, T.; Shen, T. A complete analytic model of section location in distribution network based on multi-factor dimensionality deduction. Trans. China Electrotech. Soc. 2019, 34, 3012–3024. [Google Scholar]
- Yu, H.N.; Ma, C.C.; Wang, H. Research on transmission line fault location method based on compressed sensing estimating traveling wave natural frequency. Trans. China Electrotech. Soc. 2017, 32, 140–148. [Google Scholar]
- Pan, Q.; Meng, J.L.; Zhang, L. Wavelet filtering method and its application. J. Electron. Inf. Technol. 2007, 29, 236–242. [Google Scholar]
- Donoho, D.L. De-Noising by Soft-Thresholding. IEEE Trans. Signal Process. 1995, 41, 613–627. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R.P. Localization of the complex spectrum: The S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Liu, Q.; Tai, N.L.; Fan, C.J. Phase-mode transformation of asymmetry-parameter four-parallel lines on the same tower. Trans. China Electrotech. Soc. 2015, 30, 171–1803. [Google Scholar]
- Xu, M.M.; Xiao, L.Y.; Lin, L.Z. Single phase ground fault location method for distribution lines based on zero-mode traveling wave attenuation characteristics. Trans. China Electrotech. Soc. 2015, 30, 397–404. [Google Scholar]
- Northwest Electric Power Design Institute. Power Engineering Design Manual Volume 3; Shanghai People’s Publishing House: Shanghai, China, 2010. [Google Scholar]
- Brown, R.A.; Lauzon, M.L.; Frayne, R. A General Description of Linear Time-Frequency Transforms and Formulation of a Fast, Invertible Transform That Samples the Continuous S-Transform Spectrum Nonredundantly. IEEE Trans. Signal Process. 2010, 58, 281–290. [Google Scholar] [CrossRef]
- Ji, T.T. Study on Fault Location of Distribution Network Feeders Based on Transient Traveling Waves; Shandong University: Shandong, China, 2015. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sampling Point | Secondary Side Voltage Traveling Wave of T2 Transformer | Primary Side Current Traveling Wave of T2 Transformer | Mains Side Current Traveling Wave of T2 Transformer |
|---|---|---|---|
| Arrival time/s | 0.092502 | 0.092502 | 0.092502 |
| Parameter Type of Overhead Transmission Line | Parameters of Overhead Transmission Line | |
|---|---|---|
| Cross-sectional area/mm2 | Aluminum | 95.2 |
| Steel core | 17.8 | |
| Outer radius/mm | Electric wire | 13.7 |
| Steel core | 5.4 | |
| DC resistance temperature 20 ℃/(Ω/km) | 0.33 | |
| Length of Tline1 overhead transmission line/km | 40 | |
| Length of Tline2 overhead transmission line/km | 40 | |
| Length of Tline3 overhead transmission line/km | 7 | |
| Length of Tline4 overhead transmission line/km | 7 | |
| Length of Tline5 overhead transmission line/km | 10 | |
| Length of Tline6 overhead transmission line/km | 25 | |
| Length of Tline7 overhead transmission line/km | 7 | |
| Fault Condition | Type of Method | The Fault Location is Away from the No. 2 Transformer/m | Location Error/m | |
|---|---|---|---|---|
| Theoretical Value | Actual Value | |||
| Condition 1 | Method 1 | 10,000 | 14,033.10649 | +4033.10649 |
| Method 2 | 10,948.17073 | +948.170731 | ||
| Method 3 | 10,086.92895 | +86.9289500 | ||
| Condition 2 | Method 1 | 10,000 | 14,033.10649 | +4033.10649 |
| Method 2 | 9126.185353 | −873.814647 | ||
| Method 3 | 10,088.52033 | +88.5203300 | ||
| Condition 3 | Method 1 | 10,000 | 14,033.10649 | +4033.10649 |
| Method 2 | 9142.498089 | −857.501911 | ||
| Method 3 | 10,183.03030 | +183.030300 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, S.; Miao, S.; Zhao, H.; Yin, H.; Wang, Z. A Novel Fault Location Method of a 35-kV High-Reliability Distribution Network Using Wavelet Filter-S Transform. Energies 2020, 13, 5118. https://doi.org/10.3390/en13195118
Guo S, Miao S, Zhao H, Yin H, Wang Z. A Novel Fault Location Method of a 35-kV High-Reliability Distribution Network Using Wavelet Filter-S Transform. Energies. 2020; 13(19):5118. https://doi.org/10.3390/en13195118
Chicago/Turabian StyleGuo, Shuyu, Shihong Miao, Haipeng Zhao, Haoran Yin, and Zixin Wang. 2020. "A Novel Fault Location Method of a 35-kV High-Reliability Distribution Network Using Wavelet Filter-S Transform" Energies 13, no. 19: 5118. https://doi.org/10.3390/en13195118
APA StyleGuo, S., Miao, S., Zhao, H., Yin, H., & Wang, Z. (2020). A Novel Fault Location Method of a 35-kV High-Reliability Distribution Network Using Wavelet Filter-S Transform. Energies, 13(19), 5118. https://doi.org/10.3390/en13195118