Novel Diagnostic Techniques for Rotating Electrical Machines—A Review †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Targets of Diagnostics
3. Diagnostics of Rotating Electrical Machines
Diagnostics of Electrical Motors Fed by Electronic Converter
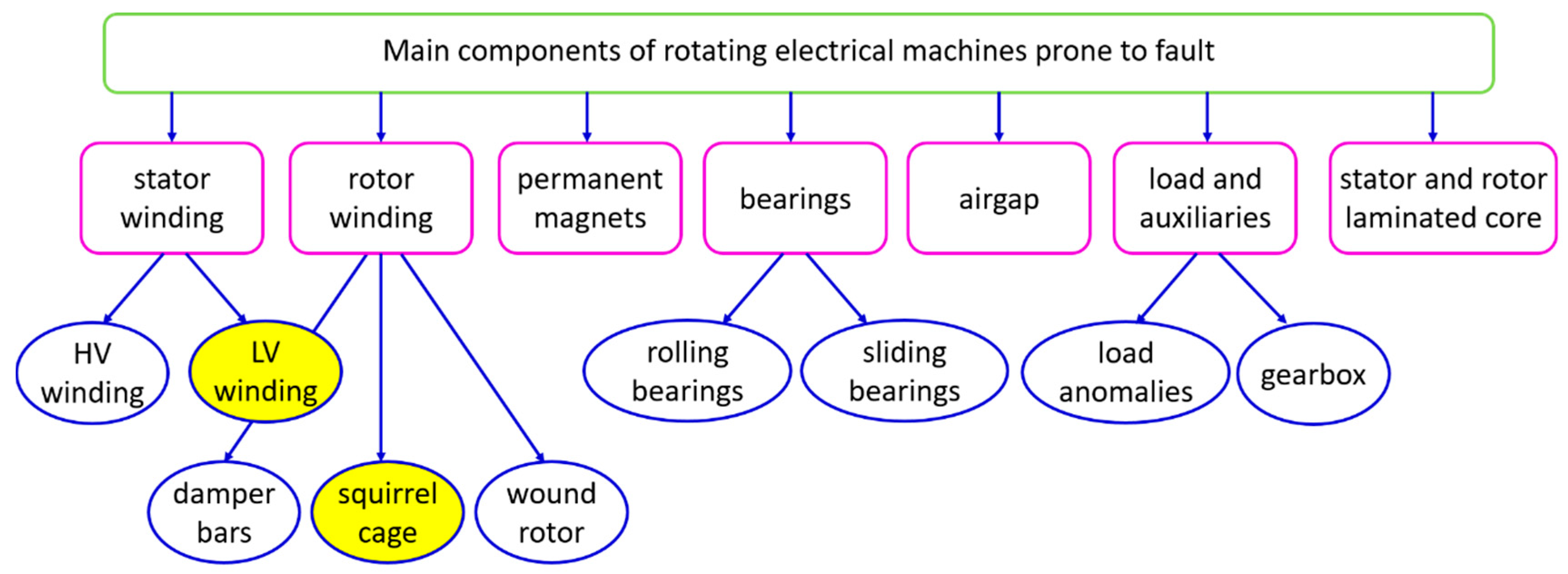
4. Stator Winding
4.1. Stator Winding at High Voltage (HV)
4.2. Stator Winding at Low Voltage (LV)
Stator Winding at Low Voltage Supplied by Electronic Converter
5. Rotor Winding
5.1. Damper Bars
5.2. Squirrel Cage Rotor
Squirrel Cage Rotor of Motors Fed by Electronic Converter
5.3. Wound Rotor
6. Permanent Magnets
7. Bearings
7.1. Rolling Bearings
7.2. Plain Bearings
8. Airgap
9. Load and Auxiliaries
9.1. Load Anomalies
9.2. Gearbox
10. Stator and Rotor Laminated Core
11. Discussion
Funding
Conflicts of Interest
References
- Nøland, J.K.; Leandro, M.; Suul, J.A.; Molinas, M. High-power machines and starter-generator topologies for more electric aircraft: A technology outlook. IEEE Access 2020, 8, 130104–130123. [Google Scholar] [CrossRef]
- Strangas, E.G.; Aviyente, S.; Neely, J.D.; Zaidi, S.S.H. The effect of failure prognosis and mitigation on the reliability of permanent-magnet AC motor drives. IEEE Trans. Ind. Electron. 2013, 60, 3519–3528. [Google Scholar] [CrossRef]
- Muetze, A.; Strangas, E.G. The useful life of inverter-based drive bearings: Methods and research directions from localized maintenance to prognosis. IEEE Ind. Appl. Mag. 2016, 22, 63–73. [Google Scholar] [CrossRef]
- Jensen, W.R.; Strangas, E.G.; Foster, S.N. A method for online stator insulation prognosis for inverter-driven machines. IEEE Trans. Ind. Appl. 2018, 54, 5897–5906. [Google Scholar] [CrossRef]
- Zaidan, M.A.; Harrison, R.F.; Mills, A.R.; Fleming, P.J. Bayesian hierarchical models for aerospace gas turbine engine prognostics. Expert Syst. Appl. 2015, 42, 539–553. [Google Scholar] [CrossRef]
- Zaidan, M.A.; Mills, A.R.; Harrison, R.F.; Fleming, P.J. Gas turbine engine prognostics using Bayesian hierarchical models: A variational approach. Mech. Syst. Signal Process. 2016, 70, 120–140. [Google Scholar] [CrossRef]
- Jin, X.; Que, Z.; Sun, Y.; Guo, Y.; Qiao, W. A data-driven approach for bearing fault prognostics. IEEE Trans. Ind. Appl. 2019, 55, 3394–3401. [Google Scholar] [CrossRef]
- Henao, H.; Capolino, G.-A.; Fernandez-Cabanas, M.; Filippetti, F.; Bruzzese, C.; Strangas, E.; Pusca, R.; Estima, J.; Riera-Guasp, M.; Hedayati-Kia, S. Trends in fault diagnosis for electrical machines. IEEE Ind. Electron. Mag. 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Capolino, G.-A.; Antonino-Daviu, J.A.; Riera-Guasp, M. Modern diagnostics techniques for electrical machines, power electronics, and drives. IEEE Trans. Ind. Electron. 2015, 62, 1738–1745. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Capolino, G.-A. Advances in electrical machine, power electronic and drive condition monitoring and fault detection: State of the art. IEEE Trans. Ind. Electron. 2015, 62, 1746–1759. [Google Scholar] [CrossRef]
- Capolino, G.-A.; Romary, R.; Hénao, H.; Pusca, R. State of the art on stray flux analysis in faulted electrical machines. In Proceedings of the 2019 IEEE WEMDCD, Athens, Greece, 22–23 April 2019. [Google Scholar]
- Tavner, P.; Ran, L.; Penman, J.; Sedding, H. Condition Monitoring of Rotating Electrical Machines, 1st ed.; The Institution of Engineering and Technology: London, UK, 2008. [Google Scholar]
- Frosini, L. Monitoring and diagnostics of electrical machines and drives: A state of the art. In Proceedings of the 2019 IEEE WEMDCD, Athens, Greece, 22–23 April 2019. [Google Scholar]
- Cusido, J.; Romeral, L.; Ortega, J.; Rosero, J.; Garcia Espinosa, A. Fault detection in induction machines using power spectral density in wavelet decomposition. IEEE Trans. Ind. Electron. 2008, 55, 633–643. [Google Scholar] [CrossRef]
- Zarri, L.; Gritli, Y.; Rossi, C.; Bellini, A.; Filippetti, F. Fault detection based on closed-loop signals for induction machines. In Proceedings of the 2015 IEEE WEMDCD, Torino, Italy, 26–27 March 2015. [Google Scholar]
- Wolkiewicz, M.; Tarchala, G.; Orlowska-Kowalska, T. Diagnosis of stator and rotor faults of an induction motor in closed-loop control structure. In Proceedings of the 2018 SPEEDAM, Amalfi, Italy, 20–22 June 2018. [Google Scholar]
- Wolkiewicz, M.; Tarchała, G.; Orłowska-Kowalska, T.; Kowalski, C.T. Online stator interturn short circuits monitoring in the DFOC induction-motor drive. IEEE Trans. Ind. Electron. 2016, 63, 2517–2528. [Google Scholar] [CrossRef]
- IEC 60034-18-42. Rotating Electrical Machines—Part 18-42: Partial Discharge Resistant Electrical Insulation Systems (Type II) Used in Rotating Electrical Machines Fed from Voltage Converters—Qualification Tests; International Electrotechnical Commission: Geneva, Switzerland, 2017. [Google Scholar]
- Cabanas, M.F.; Norniella, J.G.; Melero, M.G.; Rojas, C.H.; Cano, J.M.; Pedrayes, F.; Orcajo, G.A. Detection of stator winding insulation failures: On-line and off-line tests. In Proceedings of the 2013 IEEE WEMDCD, Paris, France, 11–12 March 2013. [Google Scholar]
- Verginadis, D.; Antonino-Daviu, J.; Karlis, A.; Danikas, M.G. Diagnosis of stator faults in synchronous generators: Short review and practical case. In Proceedings of the 2020 ICEM, Gothenburg, Sweden, 23–26 August 2020. (Virtual Conference). [Google Scholar]
- Stone, G.C.; Sedding, H.G.; Chan, C. Experience with online partial-discharge measurement in high-voltage inverter-fed motors. IEEE Trans. Ind. Appl. 2018, 54, 866–872. [Google Scholar] [CrossRef]
- Timperley, J.E.; Vallejo, J.M. Condition assessment of electrical apparatus with EMI diagnostics. IEEE Trans. Ind. Appl. 2017, 53, 693–699. [Google Scholar] [CrossRef]
- IEC 60034-18-41. Rotating Electrical Machines—Part 18-41: Partial Discharge Free Electrical Insulation Systems (Type I) Used in Rotating Electrical Machines Fed from Voltage Converters—Qualification and Quality Control Tests; International Electrotechnical Commission: Geneva, Switzerland, 2014. [Google Scholar]
- Grubic, S.; Aller, J.; Lu, B.; Habetler, T. A survey on testing and monitoring methods for stator insulation systems of low-voltage induction machines focusing on turn insulation problems. IEEE Trans. Ind. Electron. 2008, 55, 4127–4136. [Google Scholar] [CrossRef] [Green Version]
- Gandhi, A.; Corrigan, T.; Parsa, L. Recent advances in modeling and online detection of stator interturn faults in electrical motors. IEEE Trans. Ind. Electron. 2011, 58, 1567–1575. [Google Scholar] [CrossRef]
- Henao, H.; Demian, C.; Capolino, G.-A. A frequency-domain detection of stator winding faults in induction machines using an external flux sensor. IEEE Trans. Ind. Appl. 2003, 39, 1272–1279. [Google Scholar] [CrossRef]
- Penman, J.; Sedding, H.G.; Lloyd, B.A.; Fink, W.T. Detection and location of interturn short circuits in the stator windings of operating motors. IEEE Trans. Energy Convers. 1994, 9, 652–658. [Google Scholar] [CrossRef] [Green Version]
- Stavrou, A.; Sedding, H.G.; Penman, J. Current monitoring for detecting inter-turn short circuits in induction motors. IEEE Trans. Energy Convers. 2001, 16, 32–37. [Google Scholar] [CrossRef]
- Thomson, W.T. On-line MCSA to diagnose shorted turns in low voltage stator windings of 3-phase induction motors prior to failure. In Proceedings of the 2001 IEMDC, Cambridge, MA, USA, 17–20 June 2001. [Google Scholar]
- Cruz, S.M.A.; Cardoso, A.J.M. Diagnosis of stator inter-turn short circuits in DTC induction motor drives. IEEE Trans. Ind. Appl. 2004, 40, 1349–1360. [Google Scholar] [CrossRef]
- Romary, R.; Pusca, R.; Lecointe, J.P.; Brudny, J.F. Electrical machines fault diagnosis by stray flux analysis. In Proceedings of the 2013 WEMDCD, Paris, France, 11–12 March 2013. [Google Scholar]
- Joksimovic, G.M.; Riger, J.; Wolbank, T.M.; Peric, N.; Vašak, M. Stator-current spectrum signature of healthy cage rotor induction machines. IEEE Trans. Ind. Electron. 2013, 60, 4025–4033. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G.-A. Efficient digital signal processing techniques for induction machine fault diagnosis. In Proceedings of the 2013 WEMDCD, Paris, France, 11–12 March 2013. [Google Scholar]
- Cherif, H.; Menacer, A.; Romary, R.; Pusca, R. Dispersion field analysis using discrete wavelet transform for inter-turn stator fault detection in induction motors. In Proceedings of the 2017 SDEMPED, Tinos, Greece, 29 August–1 September 2017. [Google Scholar]
- Irhoumah, M.; Pusca, R.; Lefevre, E.; Mercier, D.; Romary, R.; Demian, C. Information fusion with belief functions for detection of interturn short-circuit faults in electrical machines using external flux sensors. IEEE Trans. Ind. Electron. 2018, 65, 2642–2652. [Google Scholar] [CrossRef]
- Irhoumah, M.; Pusca, R.; Lefevre, E.; Mercier, D.; Romary, R. Detection of the stator winding inter-turn faults in asynchronous and synchronous machines through the correlation between harmonics of the voltage of two magnetic flux sensors. IEEE Trans. Ind. Appl. 2019, 55, 2682–2689. [Google Scholar] [CrossRef]
- Obeid, N.H.; Battiston, A.; Boileau, T.; Nahid-Mobarakeh, B. Identification and localization of incipient intermittent inter-turn fault in the stator of a three phase permanent magnet synchronous motor. In Proceedings of the 2017 SDEMPED, Tinos, Greece, 29 August–1 September 2017. [Google Scholar]
- Bakhri, S.; Ertugrul, N.; Soong, W.L. Negative sequence current compensation for stator shorted turn detection in induction motors. In Proceeding of the 2012 IECON, Montreal, QC, Canada, 25–28 October 2012. [Google Scholar]
- Redondo, M.; Platero, C.A.; Gyftakis, K.N. Turn-to-turn fault protection technique for synchronous machines without additional voltage transformers. In Proceedings of the 2017 SDEMPED, Tinos, Greece, 29 August–1 September 2017. [Google Scholar]
- Filleau, C.; Picot, A.; Maussion, P.; Manfé, P.; Jannot, X. Stator short-circuit diagnosis in power alternators based on Flux2D/Matlab co-simulation. In Proceedings of the 2017 SDEMPED, Tinos, Greece, 29 August–1 September 2017. [Google Scholar]
- Keravand, M.; Faiz, J.; Soleimani, M.; Ghasemi-Bijan, M.; Bandar-Abadi, M.; Cruz, S.M.Â. A fast, precise and low cost stator inter-turn fault diagnosis technique for wound rotor induction motors based on wavelet transform of rotor current. In Proceedings of the 2017 SDEMPED, Tinos, Greece, 29 August–1 September 2017. [Google Scholar]
- Mirzaeva, G.; Imtiaz Saad, K. Advanced diagnosis of stator turn-to-turn faults and static eccentricity in induction motors based on internal flux measurement. IEEE Trans. Ind. Appl. 2018, 54, 3961–3970. [Google Scholar] [CrossRef]
- Muxiri, A.C.P.; Bento, F.; Fonseca, D.S.B.; Marques Cardoso, A.J. Thermal analysis of an induction motor subjected to inter-turn short-circuit failures in the stator windings. In Proceedings of the 2019 ICIEAM, Sochi, Russia, 25–29 March 2019. [Google Scholar]
- Tozzi, M.; Cavallini, A.; Montanari, G.C. Monitoring off-line and on-line PD under impulsive voltage on induction motors—part 1: Standard procedure. IEEE Elect. Insul. Mag. 2010, 26, 16–26. [Google Scholar] [CrossRef]
- Frosini, L.; Zanazzo, S.; Albini, A. A wavelet-based technique to detect stator faults in inverter-fed induction motors. In Proceedings of the 2016 ICEM, Lausanne, Switzerland, 4–7 September 2016. [Google Scholar]
- Frosini, L.; Minervini, M.; Ciceri, L.; Albini, A. Multiple faults detection in low voltage inverter-fed induction motors. In Proceedings of the 2019 SDEMPED, Toulouse, France, 27–30 August 2019. [Google Scholar]
- Fernandez-Cavero, V.; Morinigo-Sotelo, D.; Duque-Perez, O.; Pons-Llinares, J. Fault detection in inverter-fed induction motors in transient regime: State of the art. In Proceedings of the 2015 SDEMPED, Guarda, Portugal, 1–4 September 2015. [Google Scholar]
- Eldeeb, H.H.; Berzoy, A.; Mohammed, O. Comprehensive investigation of harmonic signatures resulting from inter-turn short-circuit faults in DTC driven IM operating in harsh environments. In Proceeding of the 2018 ICEM, Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Eldeeb, H.H.; Berzoy, A.; Mohammed, O. Stator fault detection on DTC-driven IM via magnetic signatures aided by 2-D FEA co-simulation. IEEE Trans. Magn. 2019, 55. [Google Scholar] [CrossRef]
- Akhil Vinayak, B.; Anjali Anand, K.; Jagadanand, G. Wavelet-based real-time stator fault detection of inverter-fed induction motor. IET Electr. Power Appl. 2020, 14, 82–90. [Google Scholar] [CrossRef]
- Afshar, M.; Tabesh, A.; Ebrahimi, M.; Khajehoddin, S.A. Stator short-circuit fault detection and location methods for brushless DFIMs using nested-loop rotor slot harmonics. IEEE Trans. Power Electr. 2020, 35, 8559–8568. [Google Scholar] [CrossRef]
- Bianchini, C.; Torreggiani, A.; Davoli, M.; Bellini, A.; Babetto, C.; Bianchi, N. Stator fault diagnosis by reactive power in dual three-phase reluctance motors. In Proceedings of the 2019 SDEMPED, Toulouse, France, 27–30 August 2019. [Google Scholar]
- Filippetti, F.; Bellini, A.; Capolino, G.-A. Condition monitoring and diagnosis of rotor faults in induction machines: State of art and future perspectives. In Proceedings of the 2013 WEMDCD, Paris, France, 11–12 March 2013. [Google Scholar]
- Salah, M.; Bacha, K.; Chaari, A.; Benbouzid, M.E.H. Brushless three-phase synchronous generator under rotating diode failure conditions. IEEE Trans. Energy Convers. 2014, 29, 594–601. [Google Scholar] [CrossRef]
- Wei, Z.; Liu, W.; Pang, J.; Sun, C.; Zhang, Z.; Ma, P. Fault diagnosis of rotating rectifier based on waveform distortion and polarity of current. IEEE Trans. Ind. Appl. 2019, 55, 2356–2367. [Google Scholar] [CrossRef]
- Yun, J.; Park, S.W.; Yang, C.; Lee, S.B.; Antonino-Daviu, J.A.; Sasic, M.; Stone, G.C. Airgap search coil-based detection of damper bar failures in salient pole synchronous motors. IEEE Trans. Ind. Appl. 2019, 55, 3640–3648. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.; Fuster-Roig, V.; Park, S.; Park, Y.; Choi, H.; Park, J.; Lee, S.B. Electrical monitoring of damper bar condition in salient-pole synchronous motors without motor disassembly. IEEE Trans. Ind. Appl. 2020, 56, 1423–1431. [Google Scholar] [CrossRef]
- Castro-Coronado, H.; Antonino-Daviu, J.; Quijano-Lopez, A.; Llovera-Segovia, P.; Fuster-Roig, V. Stray-flux and current analyses under starting for the detection of damper failures in cylindrical rotor synchronous machines. In Proceedings of the 2020 ICEM, Gothenburg, Sweden, 23–26 August 2020. (Virtual Conference). [Google Scholar]
- Jeong, M.; Yun, J.; Park, Y.; Lee, S.B.; Gyftakis, K.N. Quality assurance testing for screening defective aluminum die-cast rotors of squirrel cage induction machines. IEEE Trans. Ind. Appl. 2018, 54, 2246–2254. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Spyropoulos, D.V.; Arvanitakis, I.; Panagiotou, P.A.; Mitronikas, E.D. Induction motors torque analysis via frequency extraction for reliable broken rotor bar detection. In Proceedings of the 2020 ICEM, Gothenburg, Sweden, 23–26 August 2020. (Virtual Conference). [Google Scholar]
- Antonino-Daviu, J.; Riera-Guasp, M.; Pons-Llinares, J.; Park, J.; Lee, S.B.; Yoo, J.; Kral, C. Detection of broken outer-cage bars for double-cage induction motors under the startup transient. IEEE Trans. Ind. Appl. 2012, 48, 1539–1548. [Google Scholar] [CrossRef]
- Gritli, Y.; Lee, S.B.; Filippetti, F.; Zarri, L. Advanced diagnosis of outer cage damage in double squirrel cage induction motors under time-varying condition based on wavelet analysis. IEEE Trans. Ind. Appl. 2014, 50, 1791–1800. [Google Scholar] [CrossRef]
- Yang, C.; Kang, T.J.; Hyun, D.; Lee, S.B.; Antonino-Daviu, J.A.; Pons-Llinares, J. Reliable detection of induction motor rotor faults under the rotor axial air duct influence. IEEE Trans. Ind. Appl. 2014, 50, 2493–2502. [Google Scholar] [CrossRef]
- Kim, H.; Lee, S.B.; Park, S.; Kia, S.H.; Capolino, G.-A. Reliable detection of rotor faults under the influence of low-frequency load torque oscillations for applications with speed reduction couplings. IEEE Trans. Ind. Appl. 2016, 52, 1460–1468. [Google Scholar] [CrossRef]
- Drif, M.; Kim, H.; Kim, J.; Lee, S.B.; Cardoso, A.J.M. Active and reactive power spectra-based detection and separation of rotor faults and low frequency load torque oscillations. IEEE Trans. Ind. Appl. 2017, 53, 2702–2710. [Google Scholar] [CrossRef]
- Panagiotou, P.A.; Arvanitakis, I.; Lophitis, N.; Antonino-Daviu, J.A.; Gyftakis, K.N. On the broken rotor bar diagnosis using time-frequency analysis: Is one spectral representation enough for the characterization of monitored signals? IET Electr. Power Appl. 2019, 11, 932–942. [Google Scholar] [CrossRef] [Green Version]
- Panagiotou, P.A.; Arvanitakis, I.; Lophitis, N.; Antonino-Daviu, J.A.; Gyftakis, K.N. A new approach for broken rotor bar detection in induction motors using frequency extraction in stray flux signals. IEEE Trans. Ind. Appl. 2019, 55, 3501–3511. [Google Scholar] [CrossRef] [Green Version]
- Gyftakis, K.N.; Panagiotou, P.A.; Lee, S.B. The role of the mechanical speed frequency on the induction motor fault detection via the stray flux. In Proceedings of the 2019 SDEMPED, Toulouse, France, 27–30 August 2019. [Google Scholar]
- Ramirez-Nunez, J.A.; Antonino-Daviu, J.A.; Climente-Alarcón, V.; Quijano-López, A.; Razik, H.; Osornio-Rios, R.A.; Romero-Troncoso, R.J. Evaluation of the detectability of electromechanical faults in induction motors via transient analysis of the stray flux. IEEE Trans. Ind. Appl. 2018, 54, 4324–4332. [Google Scholar] [CrossRef]
- Concari, C.; Franceschini, G.; Tassoni, C. Differential diagnosis based on multivariable monitoring to assess induction machine rotor conditions. IEEE Trans. Ind. Electron. 2008, 55, 4156–4166. [Google Scholar] [CrossRef]
- Wolbank, T.M.; Nussbaumer, P.; Chen, H.; Macheiner, P.E. Monitoring of rotor-bar defects in inverter-fed induction machines at zero load and speed. IEEE Trans. Ind. Electron. 2011, 58, 1468–1478. [Google Scholar] [CrossRef]
- Romero-Troncoso, R.J.; Garcia-Perez, A.; Morinigo-Sotelo, D.; Duque-Perez, O.; Osornio-Rios, R.A.; Ibarra-Manzano, M.A. Rotor unbalance and broken rotor bar detection in inverter-fed induction motors at start-up and steady-state regimes by high-resolution spectral analysis. Elsevier Electr. Power Syst. Res. 2016, 133, 142–148. [Google Scholar] [CrossRef]
- Fernandez-Cavero, V.; Pons-Llinares, J.; Duque-Perez, O.; Morinigo-Sotelo, D. Detection of broken rotor bars in non-linear startups of inverter-fed induction motors. In Proceedings of the 2019 SDEMPED, Toulouse, France, 27–30 August 2019. [Google Scholar]
- Garcia-Perez, A.; Romero-Troncoso, R.J.; Camarena-Martinez, D.; Osornio-Rios, R.A.; Amezquita-Sanchez, J.P. Broken rotor bar detection in inverter-fed induction motors by time-corrected instantaneous frequency spectrogram. In Proceedings of the 2017 SDEMPED, Tinos, Greece, 29 August–1 September 2017. [Google Scholar]
- Godoy, W.F.; da Silva, I.N.; Goedtel, A.; Palácios, R.H.C.; Scalassara, P.; Moriñnigo-Sotelo, D.; Duque-Perez, O. Detection of broken rotor bars faults in inverter-fed induction motors. In Proceeding of the 2018 ICEM, Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Asad, B.; Vaimann, T.; Belahcen, A.; Kallaste, A. Broken rotor bar fault diagnostic of inverter fed induction motor using FFT, Hilbert and Park’s vector approach. In Proceeding of the 2018 ICEM, Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Spyropoulos, D.V.; Mitronikas, E.D.; Dermatas, E.S. Broken rotor bar fault diagnosis in induction motors using a Goertzel algorithm. In Proceeding of the 2018 ICEM, Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Yazidi, A.; Henao, H.; Capolino, G.-A.; Betin, F. Rotor inter-turn short circuit fault detection in wound rotor induction machines. In Proceedings of the 2010 ICEM, Rome, Italy, 6–8 September 2010. [Google Scholar]
- Gritli, Y.; Zarri, L.; Mengoni, M.; Rossi, C.; Filippetti, F.; Casadei, D. Rotor fault diagnosis of wound rotor induction machine for wind energy conversion system under time-varying conditions based on optimized wavelet transform analysis. In Proceedings of the 2013 EPE, Lille, France, 2–6 September 2013. [Google Scholar]
- Gritli, Y.; Zarri, L.; Rossi, C.; Filippetti, F.; Capolino, G.-A.; Casadei, D. Advanced diagnosis of electrical faults in wound-rotor induction machines. IEEE Trans. Ind. Electr. 2013, 60, 4012–4024. [Google Scholar] [CrossRef]
- Kia, S.H. Monitoring of wound rotor induction machines by means of discrete wavelet transform. Electr. Power Compon. Syst. 2018, 46, 2021–2035. [Google Scholar] [CrossRef]
- Moosavi, S.-M.M.; Faiz, J.; Abadi, M.B.; Cruz, S.M.A. Comparison of rotor electrical fault indices owing to inter-turn short circuit and unbalanced resistance in doubly-fed induction generator. IET Electr. Power Appl. 2019, 13, 235–242. [Google Scholar] [CrossRef]
- Zamudio-Ramirez, I.; Antonino-Daviu, J.A.; Osornio-Rios, R.A.; Romero-Troncoso, R.J.; Razik, H. Detection of winding asymmetries in wound-rotor induction motors via transient analysis of the external magnetic field. IEEE Trans. Ind. Electron. 2020, 67, 5050–5059. [Google Scholar] [CrossRef]
- Urresty, J.; Riba, J.R.; Delgado, M.; Romeral, L. Detection of demagnetization faults in surface-mounted permanent magnet synchronous motors by means of the zero-sequence voltage component. IEEE Trans. Energy Convers. 2012, 27, 42–51. [Google Scholar] [CrossRef]
- Zarate, S.; Almandoz, G.; Ugalde, G.; Poza, J.; Escalada, A.J. Effects of demagnetization on torque ripples in permanent magnet synchronous machines with manufacturing tolerances. In Proceeding of the 2018 ICEM, Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Riba, J.R.; Rosero, J.A.; Garcia, A.; Romeral, L. Detection of demagnetization faults in permanent-magnet synchronous motors under nonstationary conditions. IEEE Trans. Magn. 2009, 45, 2961–2969. [Google Scholar]
- Casadei, D.; Filippetti, F.; Rossi, C.; Stefani, A. Magnets faults characterization for permanent magnet synchronous motors. In Proceeding of the 2009 SDEMPED, Cargese, France, 31 August–3 September 2009. [Google Scholar]
- Park, Y.; Fernandez, D.; Lee, S.B.; Hyun, D.; Jeong, M.; Kommuri, S.K.; Cho, C.; Diaz, D.; Briz, F. On-line detection of rotor eccentricity and demagnetization faults in PMSMs based on Hall-effect field sensor measurements. IEEE Trans. Ind. Appl. 2019, 55, 2499–2509. [Google Scholar] [CrossRef]
- Reigosa, D.; Fernández, D.; Martínez, M.; Park, Y.; Lee, S.B.; Briz, F. Permanent magnet synchronous machine non-uniform demagnetization detection using zero-sequence magnetic field density. IEEE Trans. Ind. Appl. 2019, 55, 3823–3833. [Google Scholar] [CrossRef]
- Immovilli, F.; Bianchini, C.; Cocconcelli, M.; Bellini, A.; Rubini, R. Bearing fault model for induction motor with externally induced vibration. IEEE Trans. Ind. Electron. 2013, 60, 3408–3418. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Schmidt, S.; Heyns, P.S.; Gryllias, K.C. A discrepancy analysis methodology for rolling element bearing diagnostics under variable speed conditions. Mech. Syst. Signal Process. 2019, 116, 40–61. [Google Scholar] [CrossRef] [Green Version]
- Frosini, L.; Bassi, E. Stator current and motor efficiency as indicators for different types of bearing faults in induction motors. IEEE Trans. Ind. Electron. 2010, 57, 244–251. [Google Scholar] [CrossRef]
- Frosini, L.; Harlişca, C.; Szabó, L. Induction machine bearing faults detection by means of statistical processing of the stray flux measurements. IEEE Trans. Ind. Electron. 2015, 62, 1846–1854. [Google Scholar] [CrossRef]
- Frosini, L.; Magnaghi, M.; Albini, A.; Magrotti, G. A new diagnostic instrument to detect generalized roughness in rolling bearings for induction motors. In Proceedings of the 2015 SDEMPED, Guarda, Portugal, 1–4 September 2015. [Google Scholar]
- Martínez-Montes, E.; Jiménez-Chillarón, L.; Gilabert-Marzal, J.; Antonino-Daviu, J.; Quijano-López, A. Evaluation of the detectability of bearing faults at different load levels through the analysis of stator currents. In Proceeding of the 2018 ICEM, Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Leite, V.C.M.N.; Borges da Silva, J.G.; Cintra Veloso, G.F.; Borges da Silva, L.E.; Lambert-Torres, G.; Bonaldi, E.L.; de Lacerda de Oliveira, L.E. Detection of localized bearing faults in induction machines by spectral kurtosis and envelope analysis of stator current. IEEE Trans. Ind. Electron. 2015, 62, 1855–1865. [Google Scholar] [CrossRef]
- Hamadache, M.; Lee, D.; Veluvolu, K.C. Rotor speed-based bearing fault diagnosis (RSB-BFD) under variable speed and constant load. IEEE Trans. Ind. Electron. 2015, 62, 6486–6495. [Google Scholar] [CrossRef]
- Rzeszucinski, P.; Orman, M.; Pinto, C.T.; Tkaczyk, A.; Sulowicz, M. Bearing health diagnosed with a mobile phone: Acoustic signal measurements can be used to test for structural faults in motors. IEEE Ind. Appl. Mag. 2018, 24, 17–23. [Google Scholar] [CrossRef]
- Gongora, W.S.; Goedtel, A.; Favoretto Castoldi, M.; Oliveira da Silva, S.A.; Nunes da Silva, I. Embedded system to detect bearing faults in line-connected induction motors. In Proceeding of the 2018 ICEM, Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Ye, M.; Huang, J. Bearing fault diagnosis under time-varying speed and load conditions via speed sensorless algorithm and angular resample. In Proceeding of the 2018 ICEM, Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- He, M.; He, D. Deep learning based approach for bearing fault diagnosis. IEEE Trans. Ind. Appl. 2017, 53, 3057–3065. [Google Scholar] [CrossRef]
- Guedidi, A.; Guettaf, A.; Cardoso, A.J.M.; Laala, W.; Arif, A. Bearing faults classification based on variational mode decomposition and artificial neural network. In Proceedings of the 2019 SDEMPED, Toulouse, France, 27–30 August 2019. [Google Scholar]
- Khlaief, A.; Nguyen, K.; Medjaher, K.; Picot, A.; Maussion, P.; Tobon, D.; Chauchat, B.; Cheron, R. Feature engineering for ball bearing combined-fault detection and diagnostic. In Proceedings of the 2019 SDEMPED, Toulouse, France, 27–30 August 2019. [Google Scholar]
- Immovilli, F.; Lippi, M.; Cocconcelli, M. Automated bearing fault detection via long short-term memory networks. In Proceedings of the 2019 SDEMPED, Toulouse, France, 27–30 August 2019. [Google Scholar]
- Zhang, S.; Zhang, S.; Wang, B.; Habetler, T.G. Deep learning algorithms for bearing fault diagnostics—A comprehensive review. IEEE Access 2020, 8, 29857–29881. [Google Scholar] [CrossRef]
- Klempner, G.; Kerszenbaum, I. Handbook of Large Turbo-Generators Operation and Maintenance, 3rd ed.; Wiley-IEEE Press: Piscataway, NJ, USA, 2018. [Google Scholar]
- Salah, A.A.; Dorrell, D.G.; Guo, Y. A review of the monitoring and damping unbalanced magnetic pull in induction machines due to rotor eccentricity. IEEE Trans. Ind. Appl. 2019, 55, 2569–2580. [Google Scholar] [CrossRef]
- Dorrell, D.G.; Thomson, W.T. Analysis of airgap flux, current, and vibration signals as a function of the combination of static and dynamic airgap eccentricity in 3-phase induction motors. IEEE Trans. Ind. Appl. 1997, 33, 24–34. [Google Scholar] [CrossRef]
- Concari, C.; Franceschini, G.; Tassoni, C. Toward practical quantification of induction drive mixed eccentricity. IEEE Trans. Ind. Appl. 2011, 47, 1232–1239. [Google Scholar] [CrossRef]
- Park, Y.; Choi, H.; Shin, J.; Park, J.; Lee, S.-B.; Jo, H. Airgap flux based detection and classification of induction motor rotor and load defects during the starting transient. IEEE Trans. Ind. Electron. 2020, 67, 10075–10084. [Google Scholar] [CrossRef]
- Samonig, M.A.; Wolbank, T.M. Exploiting rotor slotting harmonics to determine and separate static and dynamic air-gap eccentricity in induction machines. In Proceedings of the 2017 SDEMPED, Tinos, Greece, 29 August–1 September 2017.
- Ebrahimi, B.M.; Faiz, J.; Roshtkhari, M.J. Static-, dynamic-, and mixed-eccentricity fault diagnoses in permanent-magnet synchronous motors. IEEE Trans. Ind. Electron. 2009, 56, 4727–4739. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Roshtkhari, M.J.; Faiz, J.; Khatam, S.V. Advanced eccentricity fault recognition in permanent magnet synchronous motors using stator current signature analysis. IEEE Trans. Ind. Electron. 2014, 61, 2041–2052. [Google Scholar] [CrossRef]
- Herman, J.; Beguš, S.; Mihalič, P.; Bojkovski, J. Novel method for direct measurement of air gap anomalies in direct-drive electrical motors. IEEE Trans. Ind. Electron. 2020, 67, 2422–2429. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Platero, C.A.; Bernal, S. Off-line detection of static eccentricity in salient-pole synchronous machines. In Proceeding of the 2018 ICEM, Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Salles, G.; Filippetti, F.; Tassoni, C.; Grellet, G.; Franceschini, G. Monitoring of induction motor load by neural network techniques. IEEE Trans. Power Electron. 2000, 15, 762–768. [Google Scholar] [CrossRef]
- Blodt, M.; Regnier, J.; Chabert, M.; Faucher, J. Fault indicators for stator current based detection of torque oscillations in induction motors at variable speed using time-frequency analysis. In Proceedings of the 2006 IET PEMD, Dublin, Ireland, 4–6 April 2006. [Google Scholar]
- Frosini, L.; Beccarisi, F.; Albini, A. Detection of torque oscillations in induction motor drives by linear discriminant analysis. In Proceedings of the 2017 SDEMPED, Tinos, Greece, 29 August–1 September 2017. [Google Scholar]
- D’Elia, G.; Mucchi, E.; Cocconcelli, M. On the identification of the angular position of gears for the diagnostics of planetary gearboxes. Mech. Syst. Signal Process. 2017, 83, 305–320. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G.-A. A comparative study of acoustic, vibration and stator current signatures for gear tooth fault diagnosis. In Proceedings of the 2012 ICEM, Marseille, France, 2–5 September 2012. [Google Scholar]
- Kia, S.H.; Henao, H.; Capolino, G.-A. Gear tooth surface damage fault detection using induction machine stator current space vector analysis. IEEE Trans. Ind. Electron. 2015, 62, 1866–1878. [Google Scholar] [CrossRef]
- Kia, S.H.; Marzebali, M.H.; Henao, H.; Capolino, G.-A.; Faiz, J. Simulation and experimental analyses of planetary gear tooth defect using electrical and mechanical signatures of wound rotor induction generators. In Proceedings of the 2017 SDEMPED, Tinos, Greece, 29 August–1 September 2017. [Google Scholar]
- Bertenshaw, D.R.; Smith, A.C.; Ho, C.W.; Chan, T.; Sasic, M. Detection of stator core faults in large electrical machines. IET Electr. Power Appl. 2012, 6, 295–301. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.; Hong, J.; Lee, K.-W.; Lee, S.B.; Wiedenbrug, E.J. A stator-core quality-assessment technique for inverter-fed induction machines. IEEE Trans. Ind. Appl. 2010, 46, 213–221. [Google Scholar]
- Romary, R.; Jelassi, S.; Brudny, J.F. Stator-interlaminar-fault detection using an external-flux-density sensor. IEEE Trans. Ind. Electron. 2010, 57, 237–243. [Google Scholar] [CrossRef]
- Romary, R.; Demian, C.; Schlupp, P.; Roger, J.-Y. Offline and online methods for stator core fault detection in large generators. IEEE Trans. Ind. Electron. 2013, 60, 4084–4092. [Google Scholar] [CrossRef]

© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frosini, L. Novel Diagnostic Techniques for Rotating Electrical Machines—A Review. Energies 2020, 13, 5066. https://doi.org/10.3390/en13195066
Frosini L. Novel Diagnostic Techniques for Rotating Electrical Machines—A Review. Energies. 2020; 13(19):5066. https://doi.org/10.3390/en13195066
Chicago/Turabian StyleFrosini, Lucia. 2020. "Novel Diagnostic Techniques for Rotating Electrical Machines—A Review" Energies 13, no. 19: 5066. https://doi.org/10.3390/en13195066
APA StyleFrosini, L. (2020). Novel Diagnostic Techniques for Rotating Electrical Machines—A Review. Energies, 13(19), 5066. https://doi.org/10.3390/en13195066