Mechanical and Electrical Simulations of the Tulip Contact System


 , ,
, ,  and
and
Abstract
1. Introduction
- The ability to observe the behavior, operation, forces, and energy of all lamellas of the stationary (fixed) contact;
- Observation of the influence of the eccentricity of the movable contact mounting on the possibility of switching on;
- Mechanical analysis of the contact as for a real physical system;
- Determination of electrical parameter values during the switching operation;
- Contact development in other extinguishing environments (future work on the procured model).
2. State of the Art
3. Contacts in Electrical Apparatuses and Current Circuits
3.1. Non-Connecting and Connecting Contacts
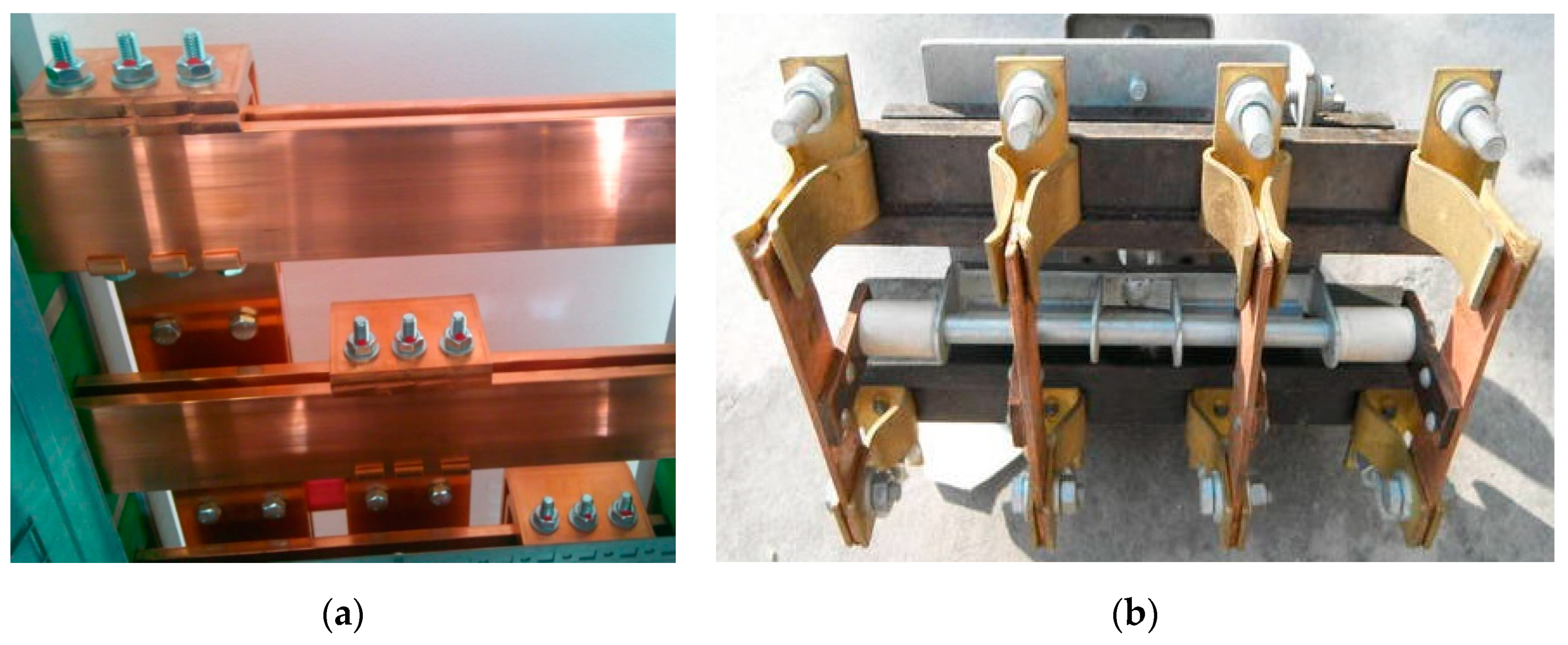
3.2. Tulip Contacts
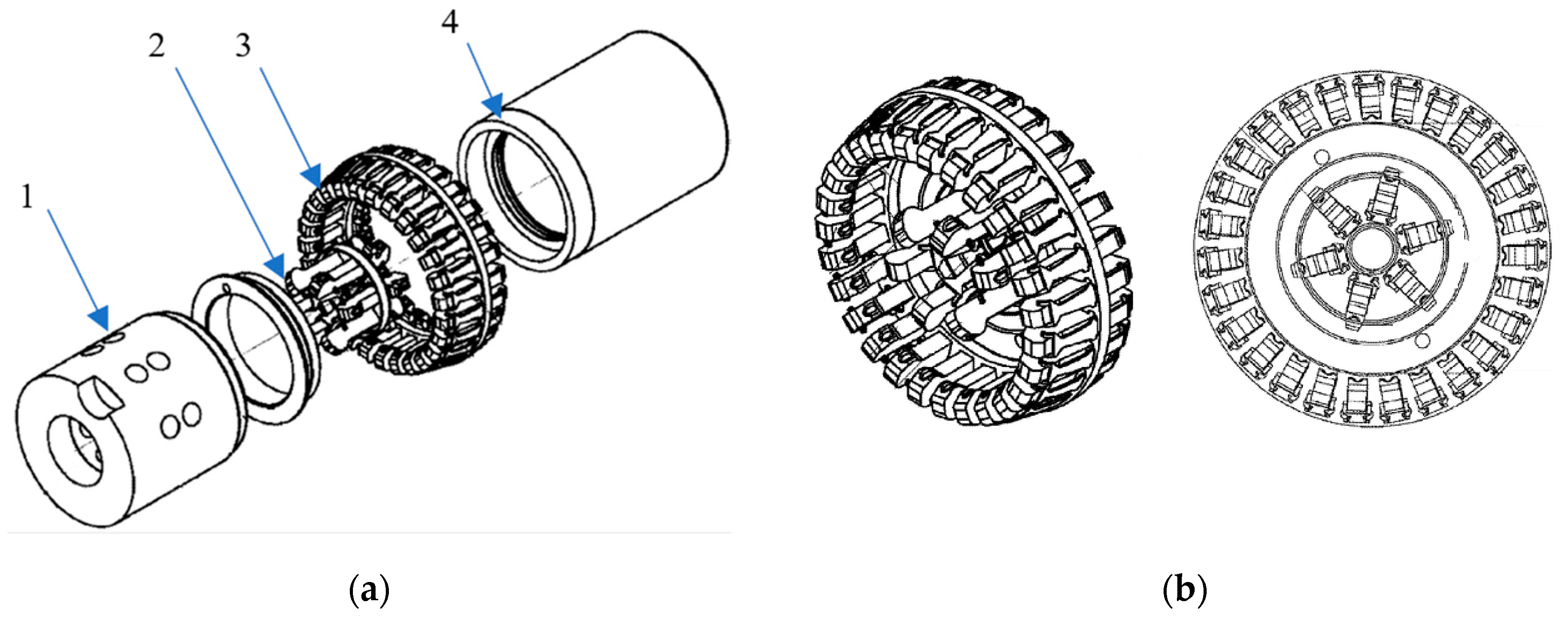
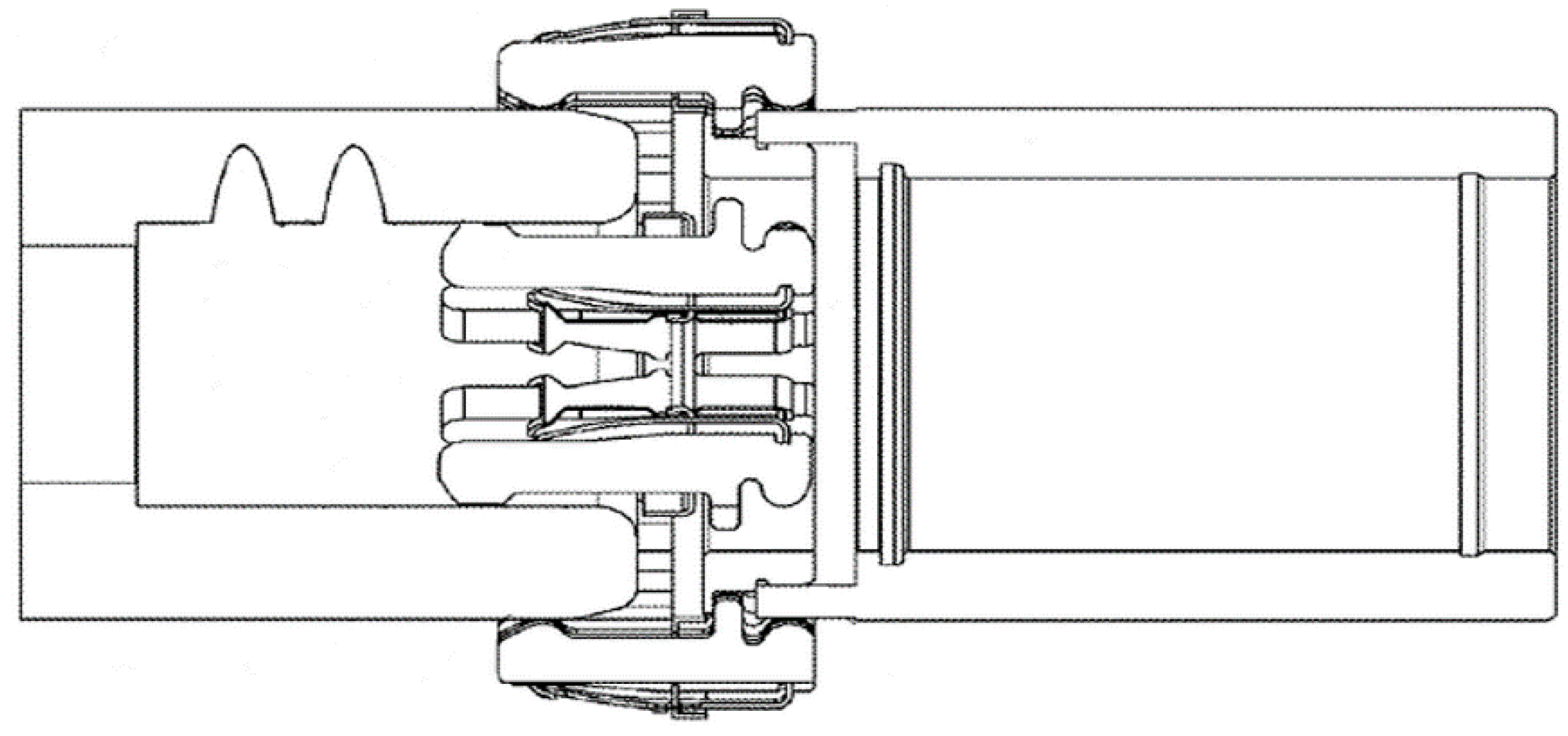
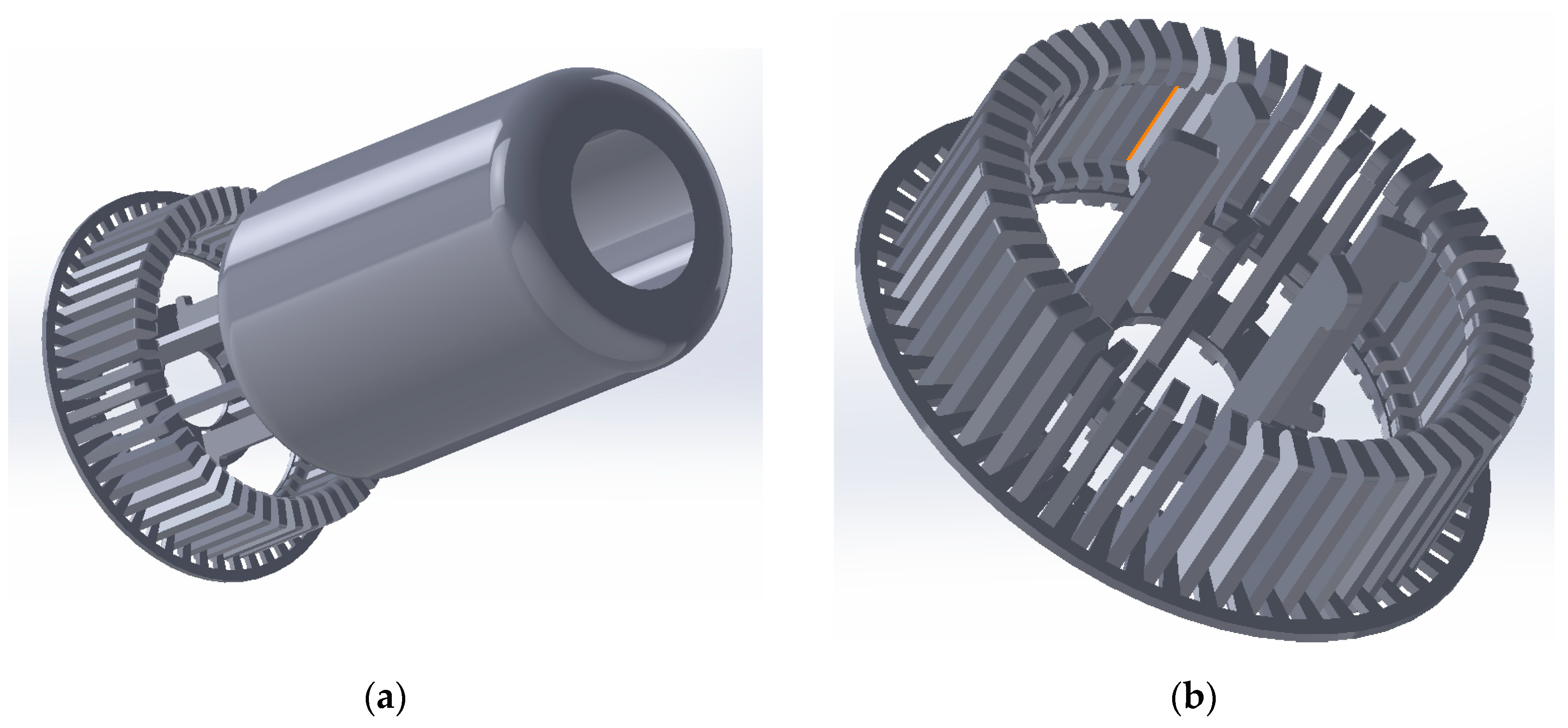
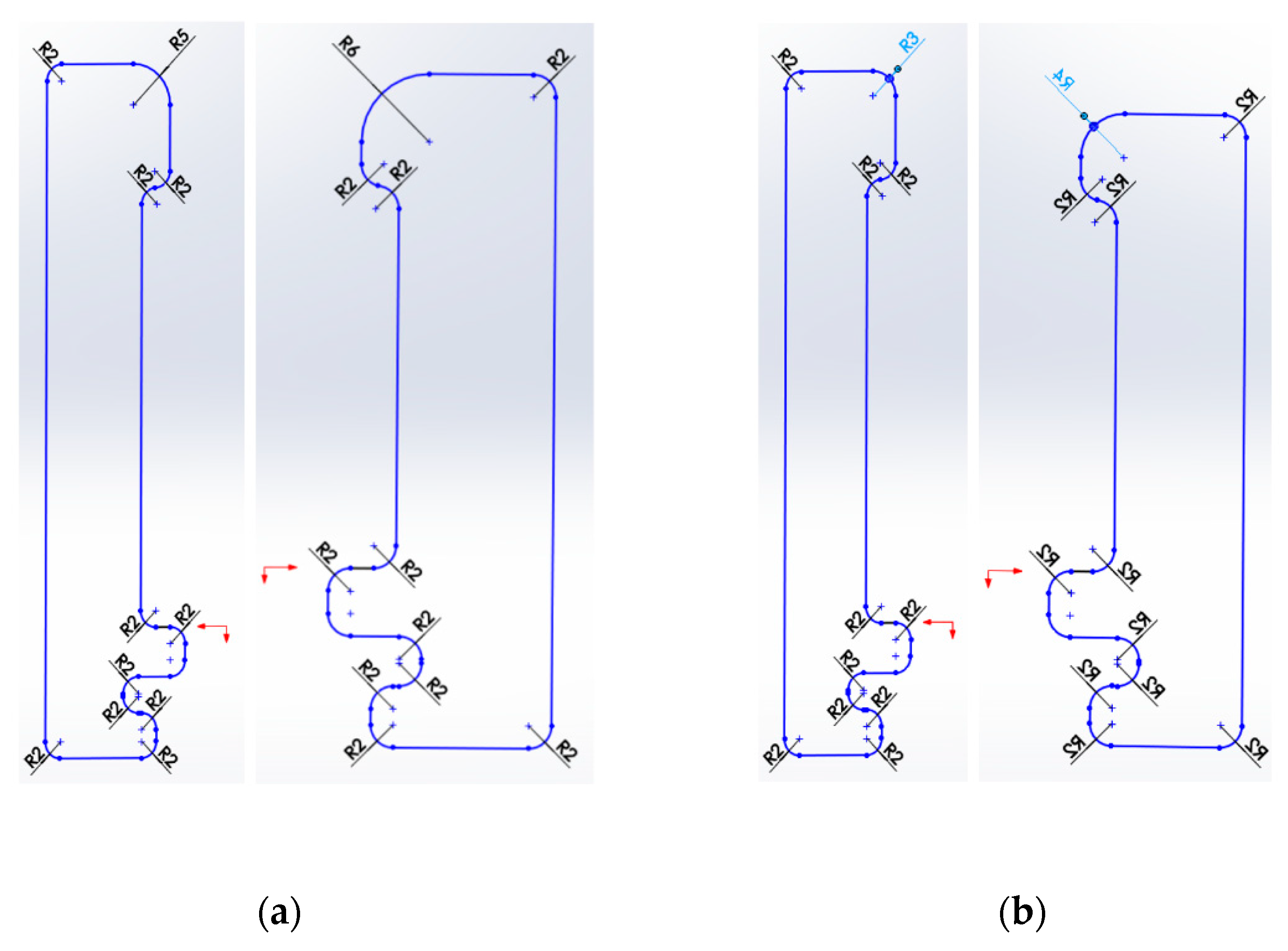
4. Construction of a Tulip Contact Used in Finite Element Method Analysis
5. Physical Properties of Tulip Contact Systems
5.1. Insulation Strength of Contact Systems
5.2. Continuous, Variable and Short-Circuit Current Carrying Capacity
- Unprotected current circuits placed in air or an SF6 environment, where heat is mainly released into the environment through radiation and lifting;
- Homogeneous current paths, surrounded by a layer of solid insulation, where all forms of heat transfer are significant;
- Heterogeneous current circuits, in which, in a steady state, an important role in heat transfer is carried out by axial heat flow.
6. Motion Simulations of the Tulip Contact System
6.1. Environment for Simulation Research
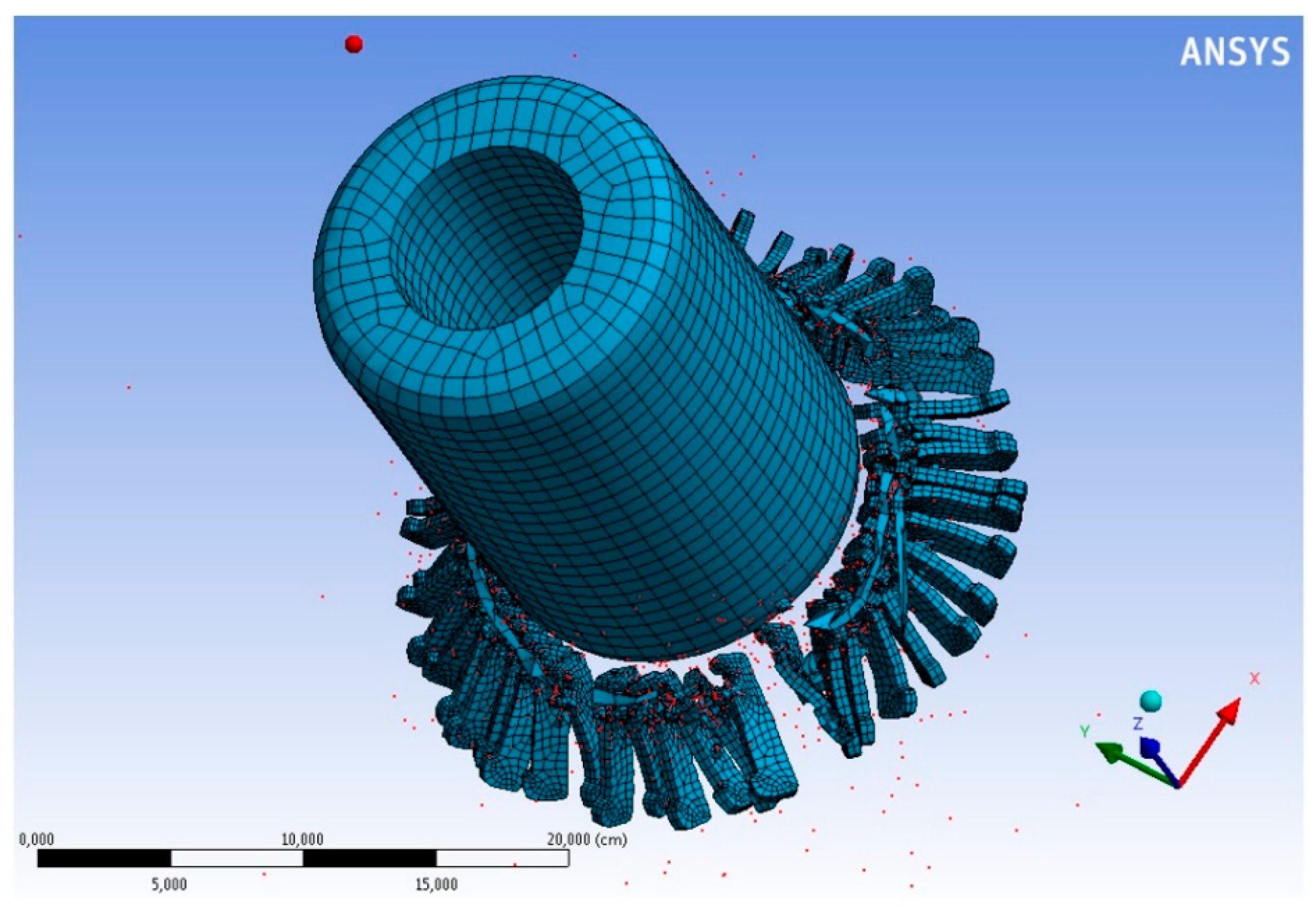
6.2. Discretization of the Procured Model
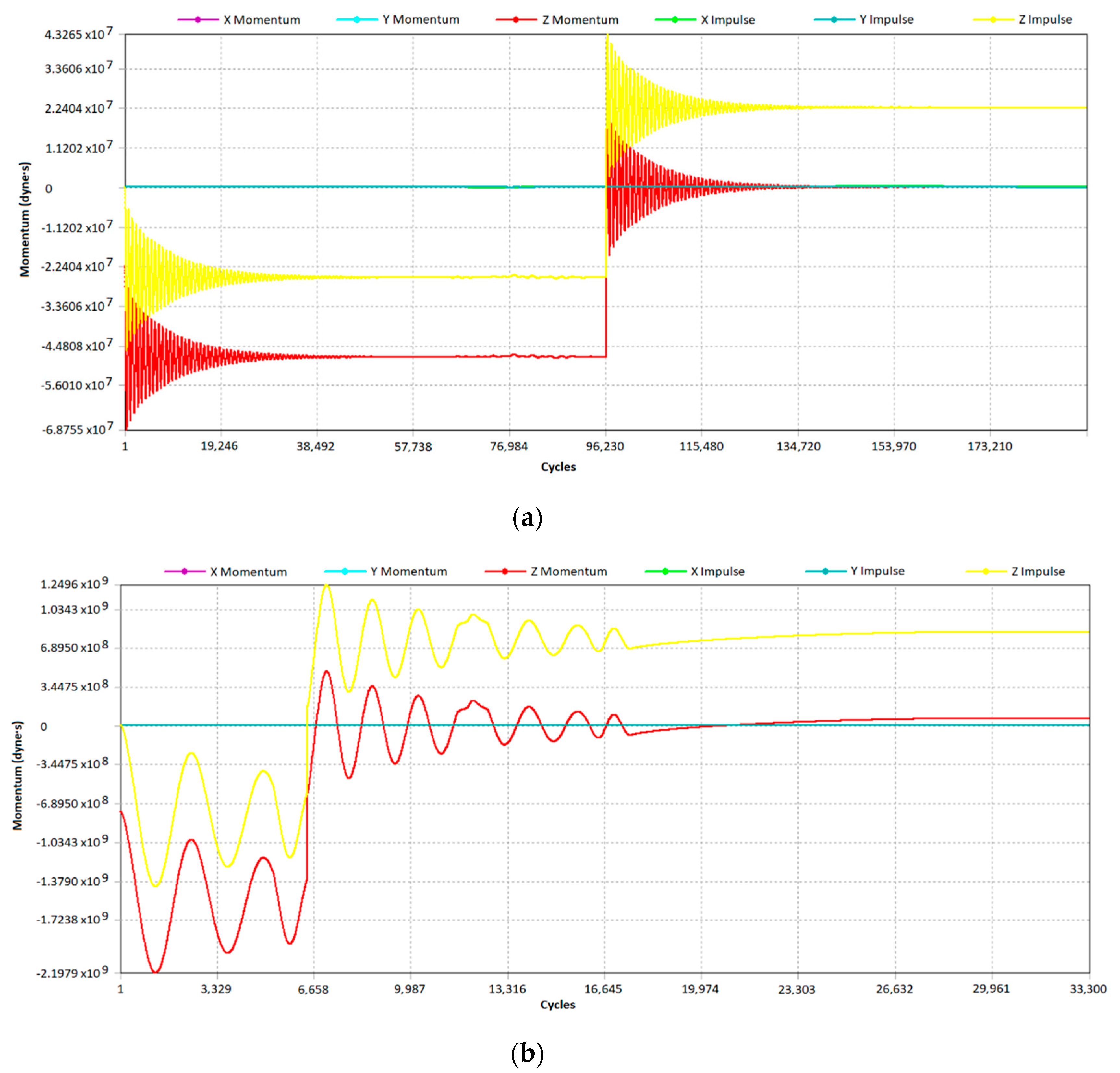
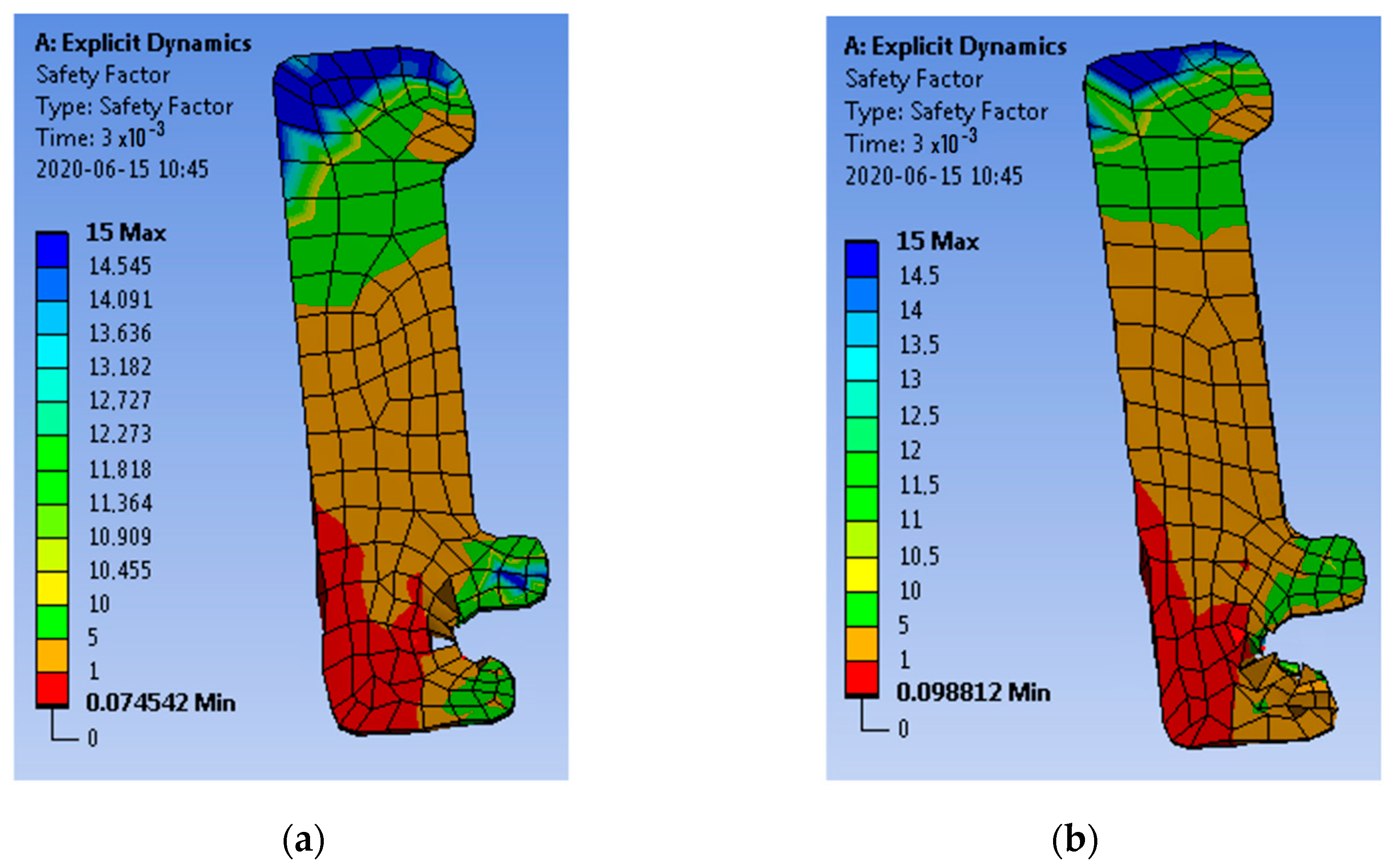
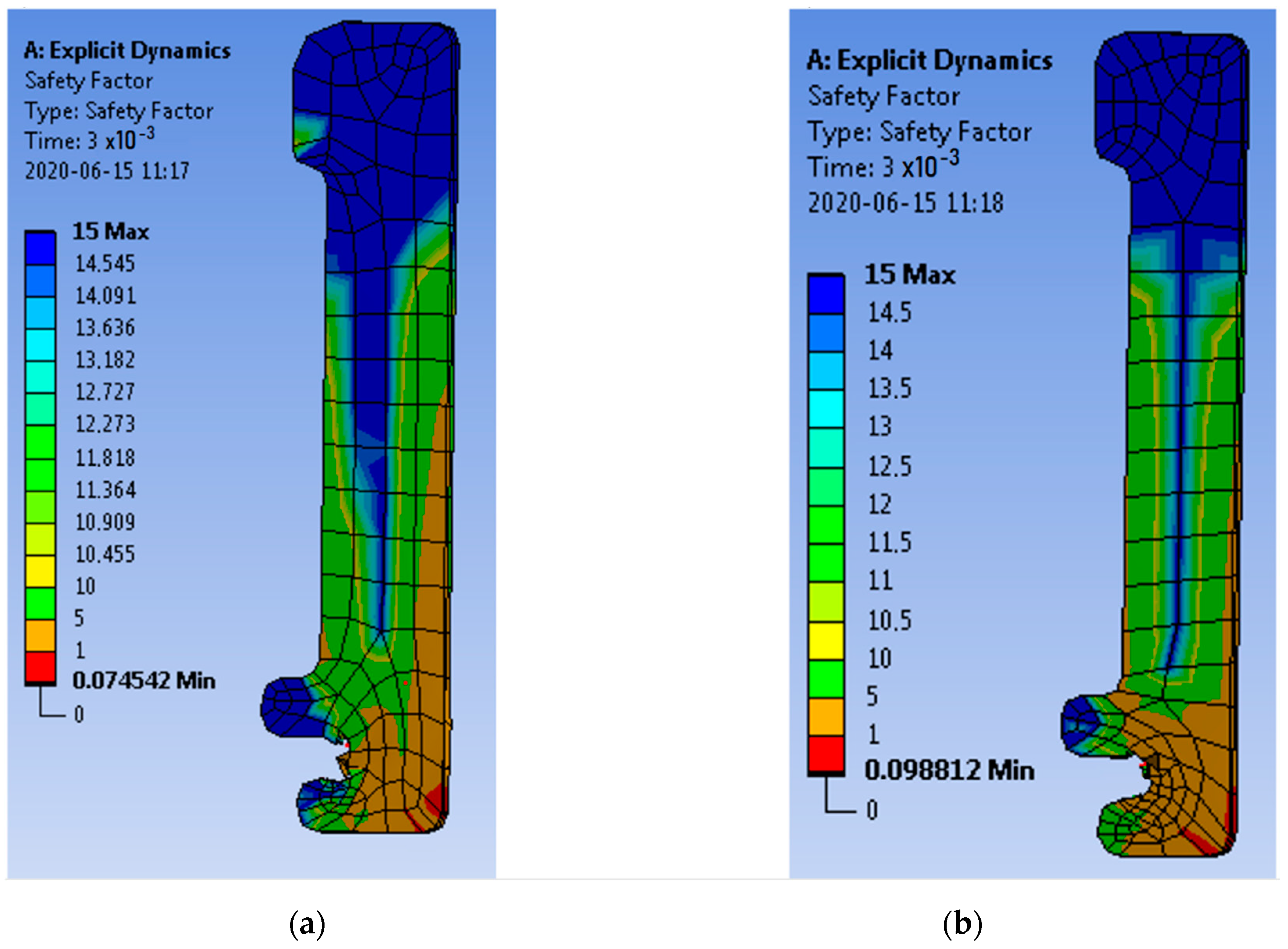
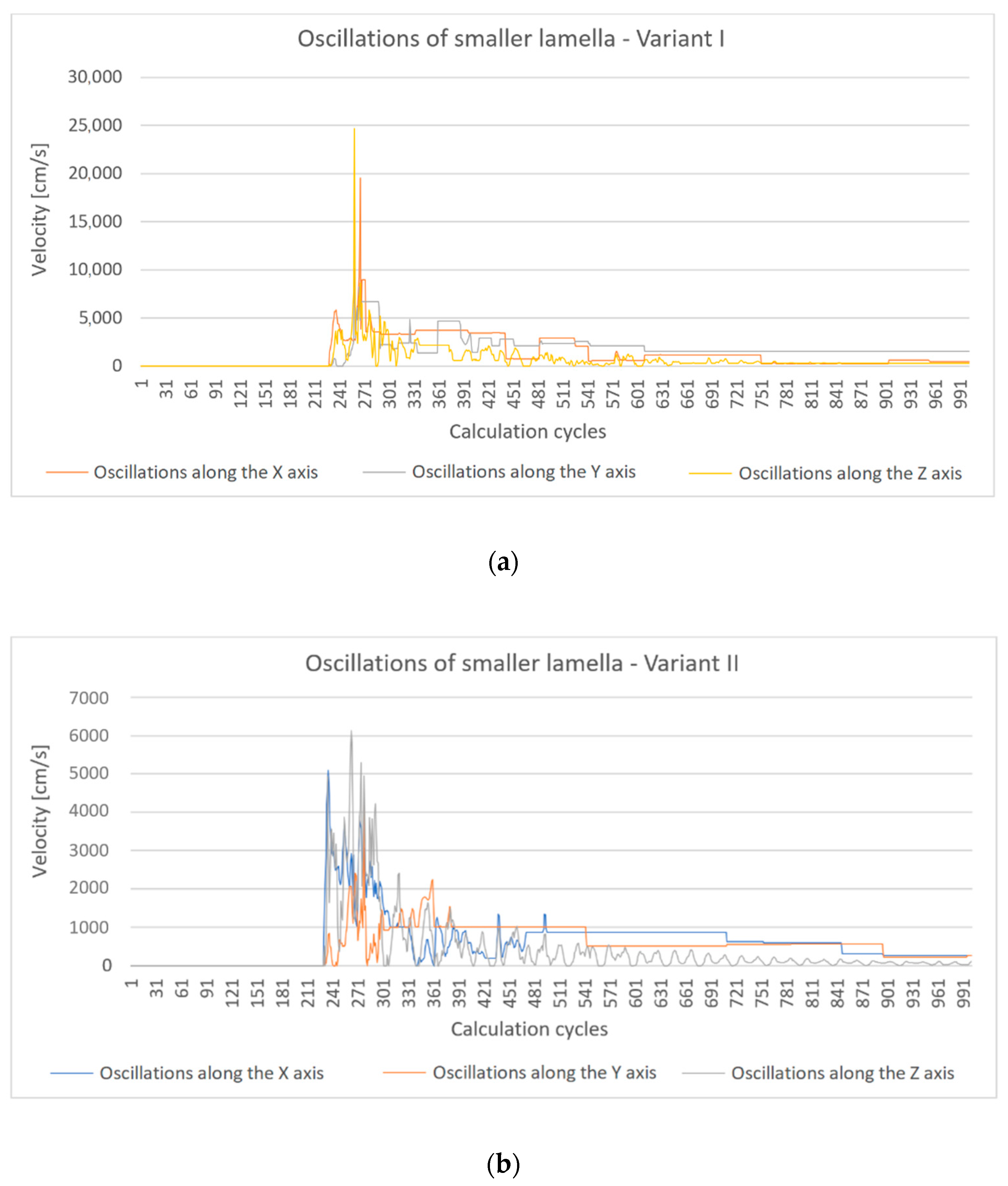
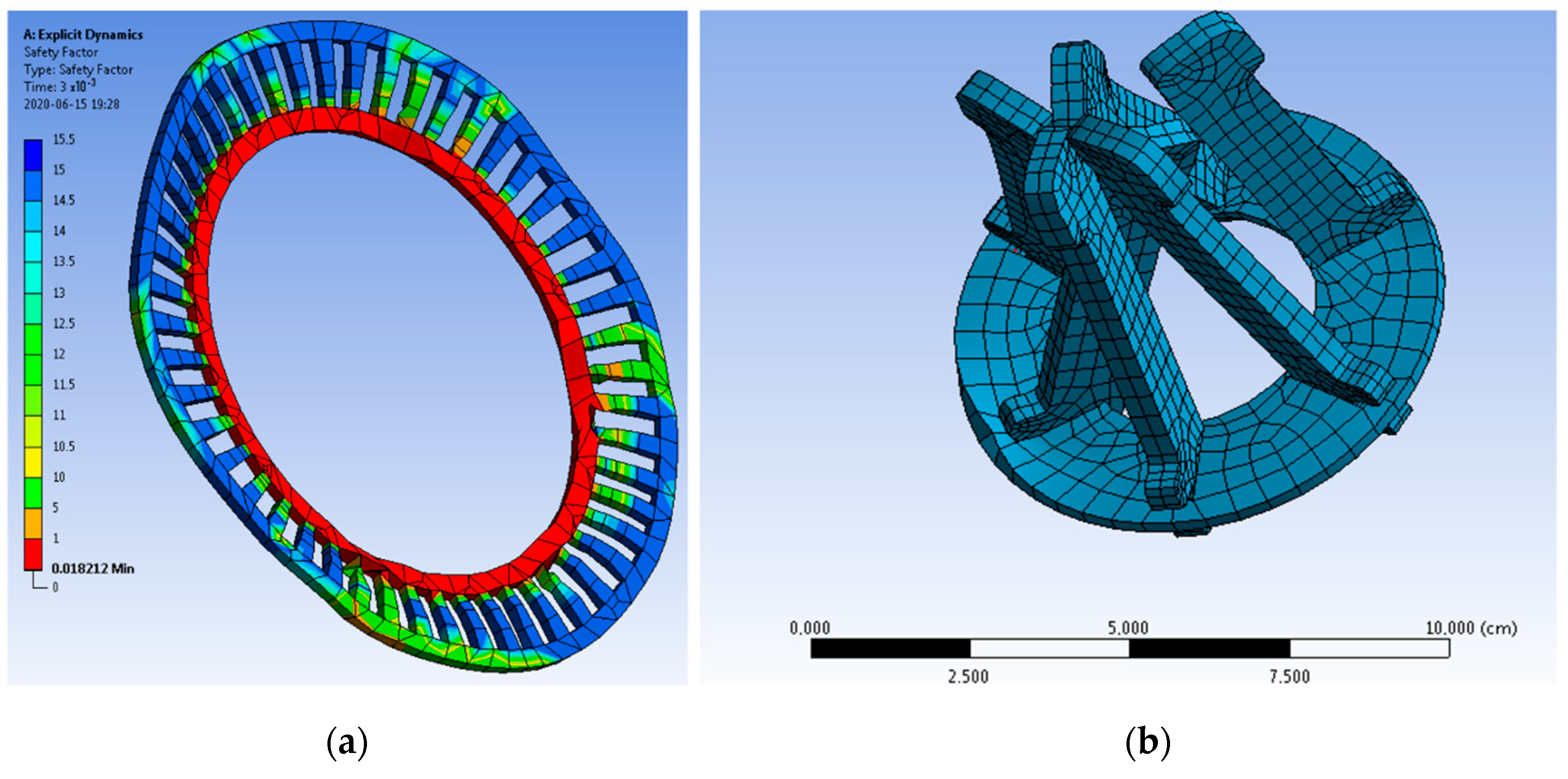
6.3. Analysis of the Tulip Contact Motion Dynamics—Variant I
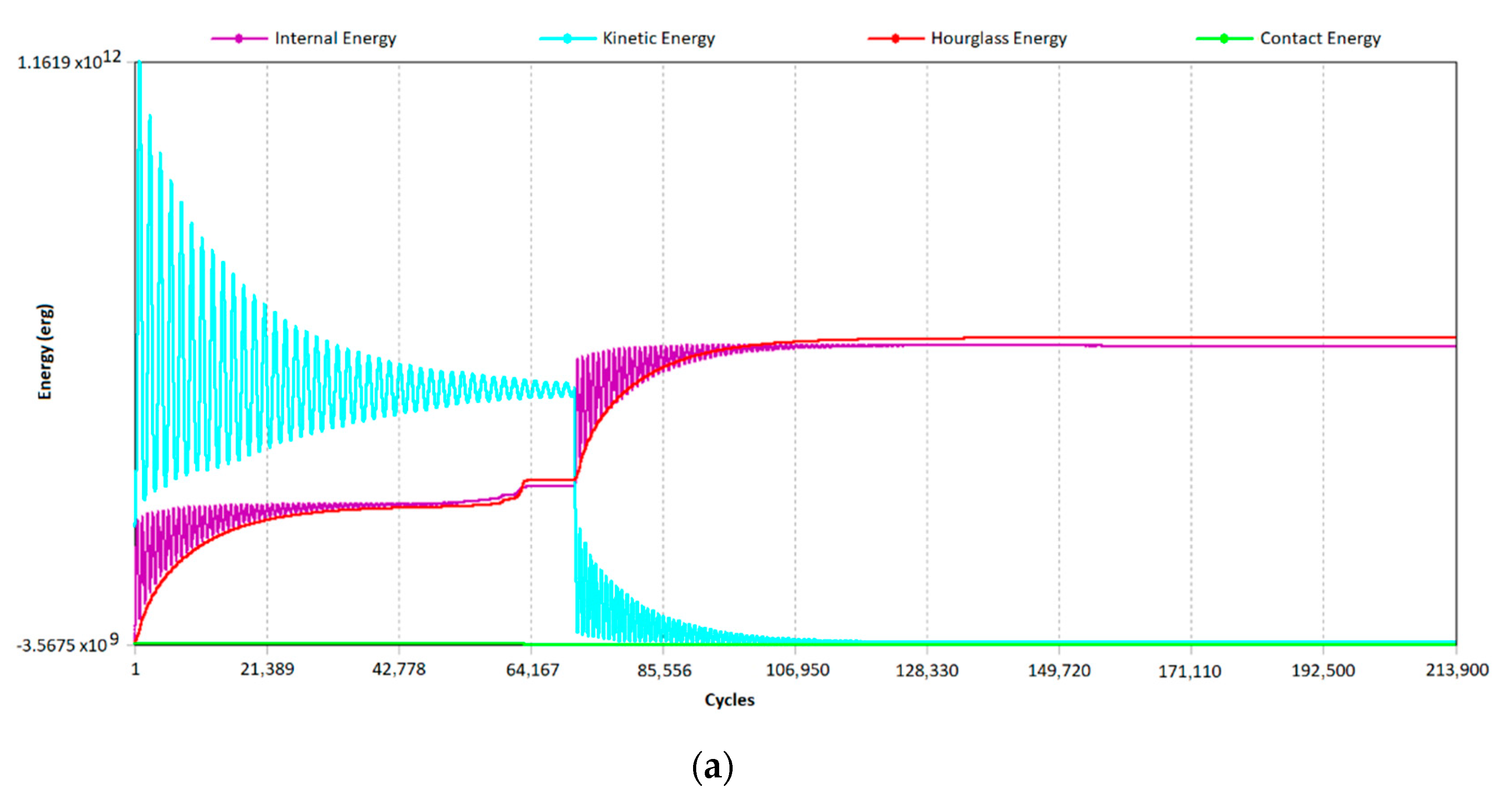
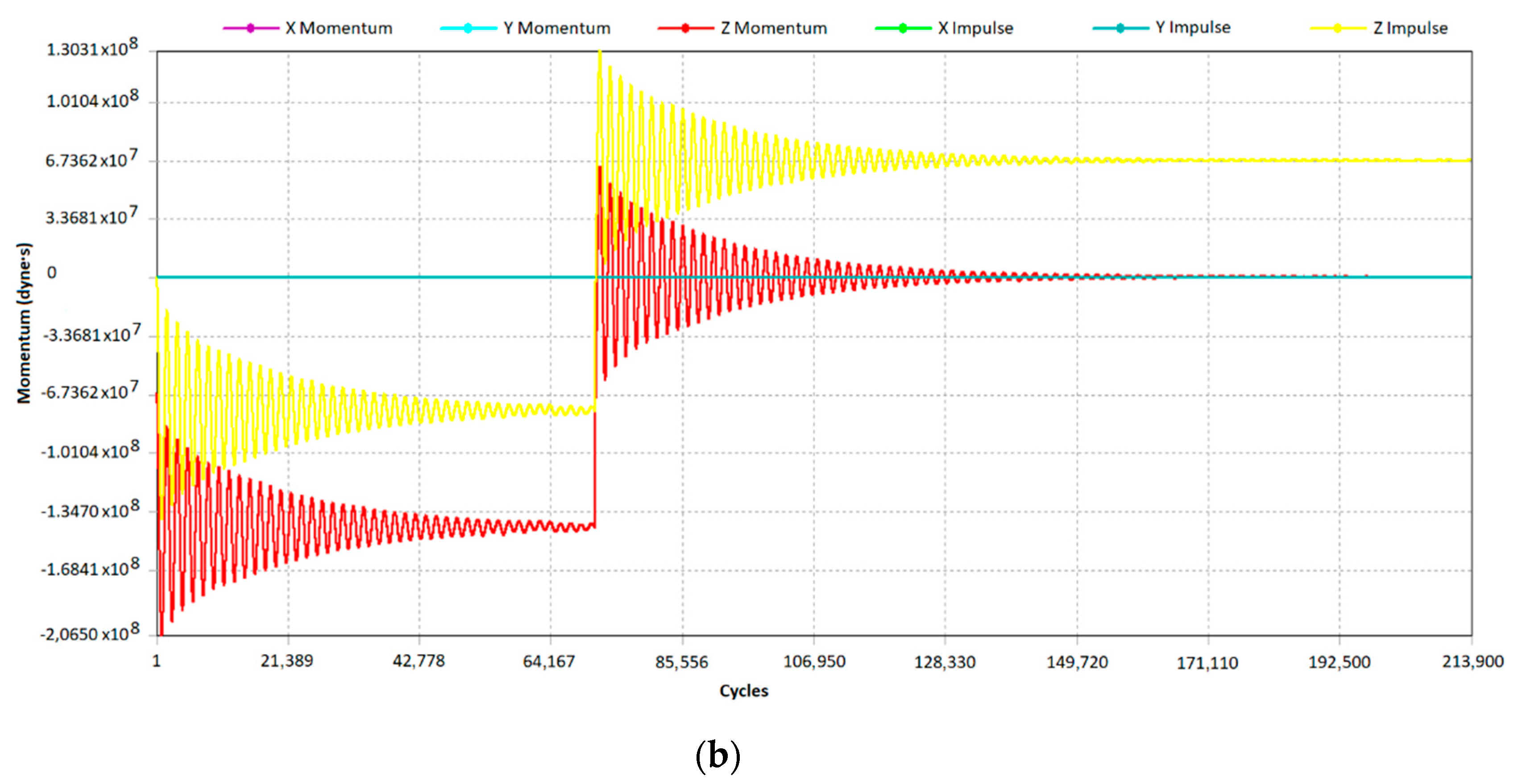
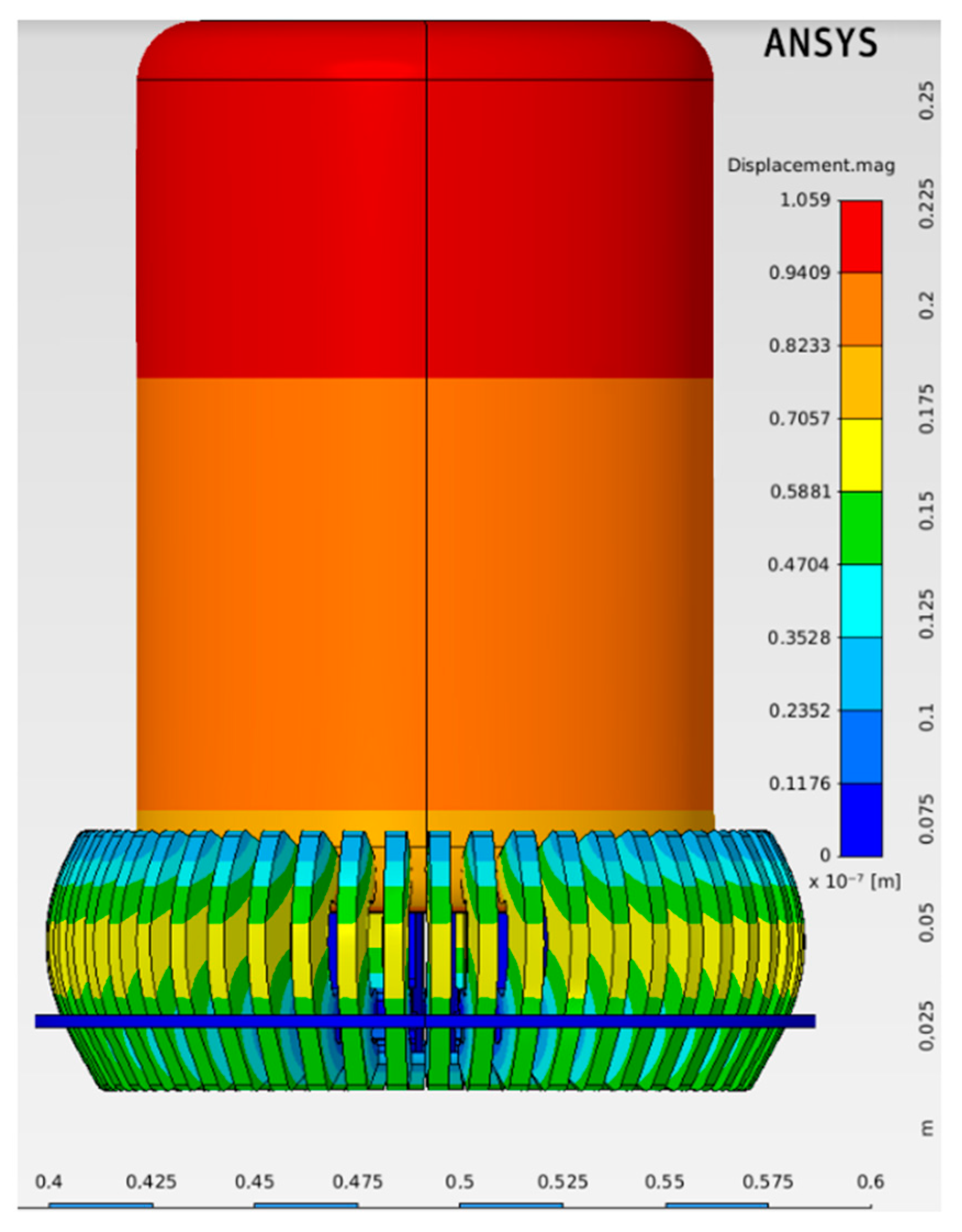
6.4. Results of Motion Dynamics—Variant I
6.5. Analysis of the Tulip Contact Motion Dynamics—Variant II
6.6. Defects Study in Motion Dynamics Analysis
7. Electrical Simulations of the Tulip Contact System
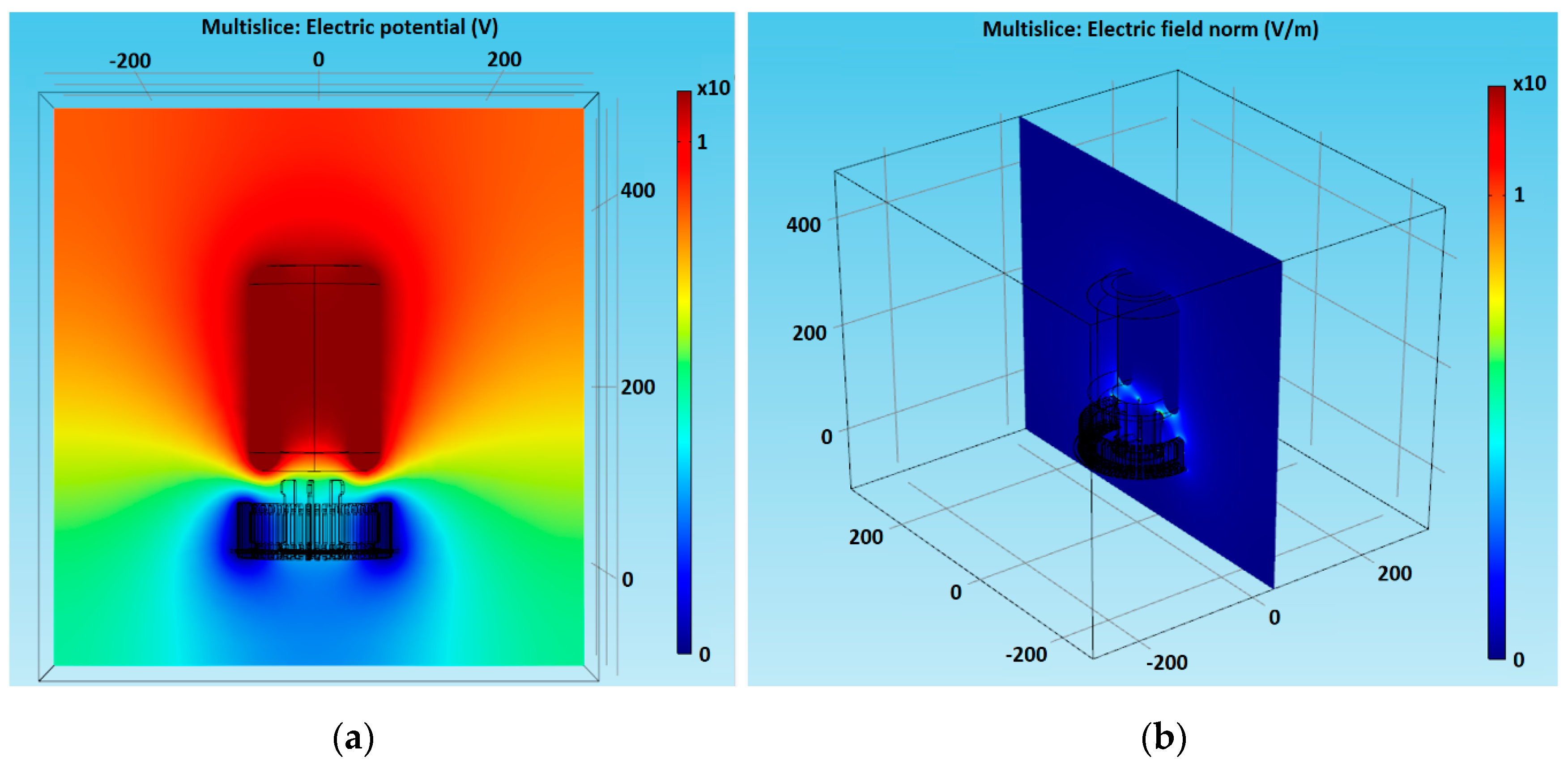
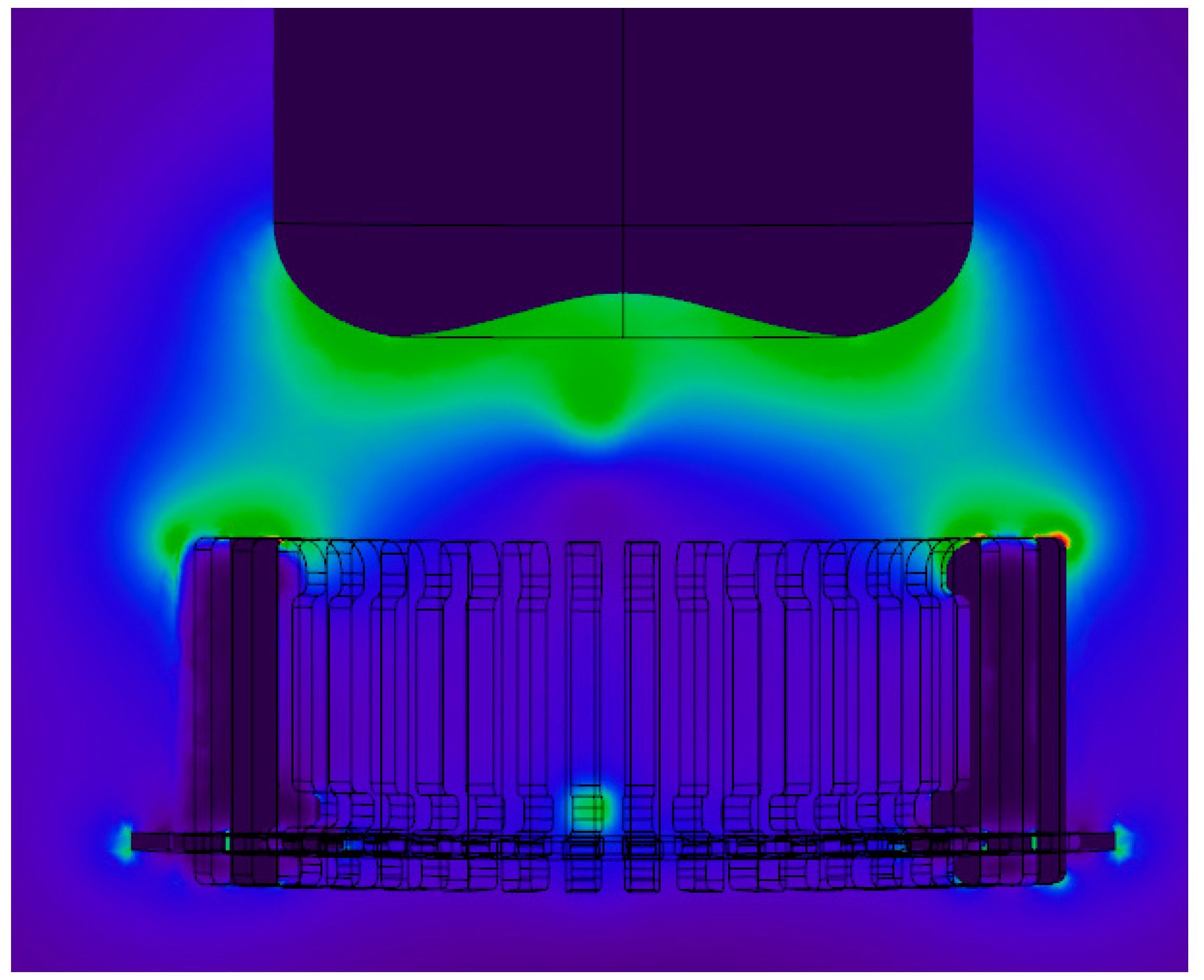
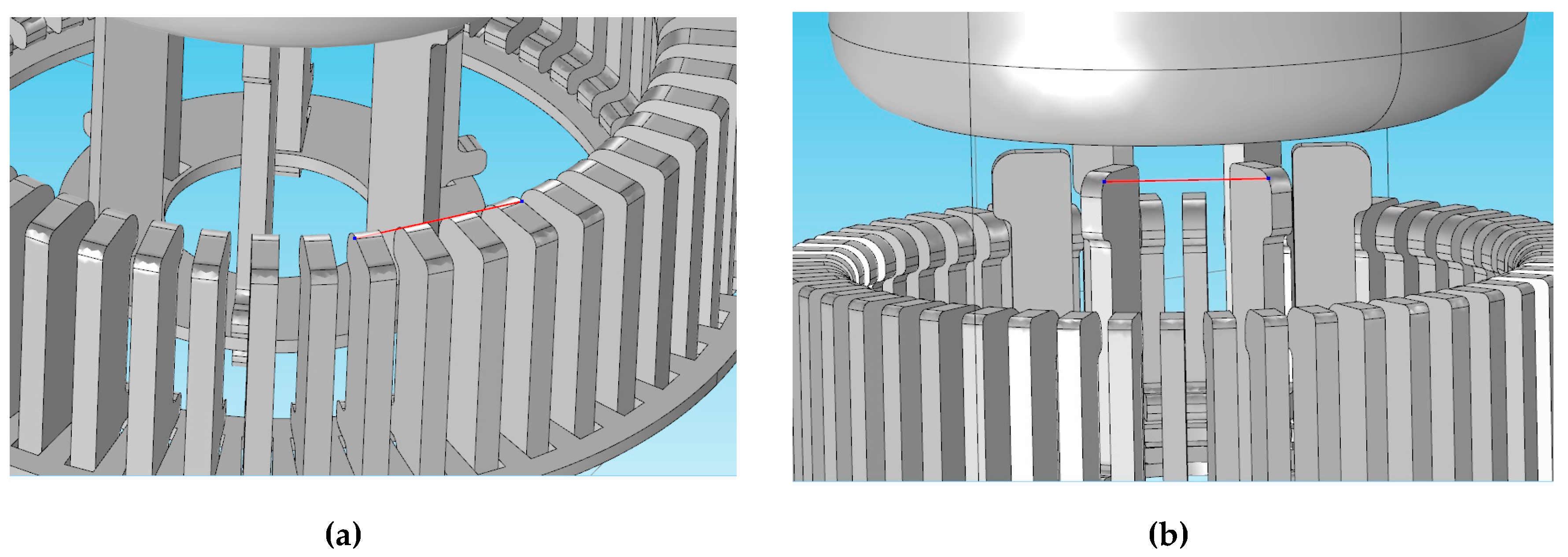
7.1. Electric Field Distribution in a Tulip Contact System
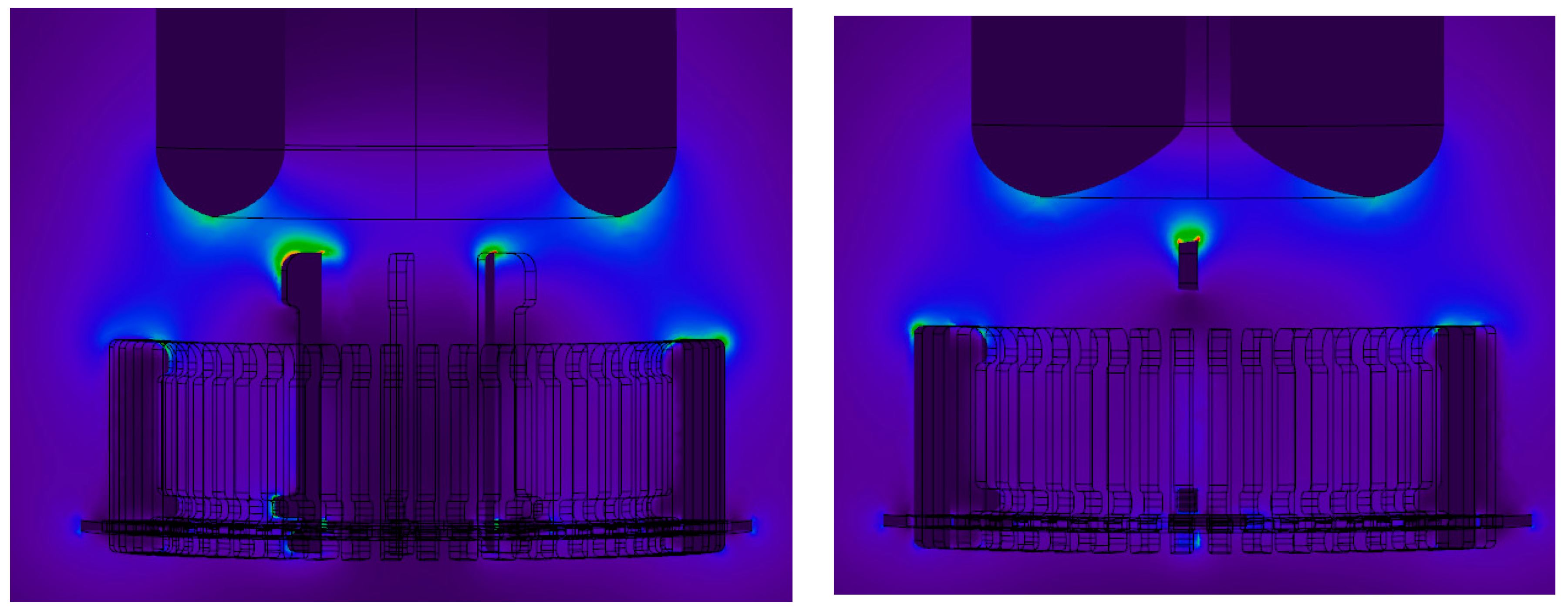
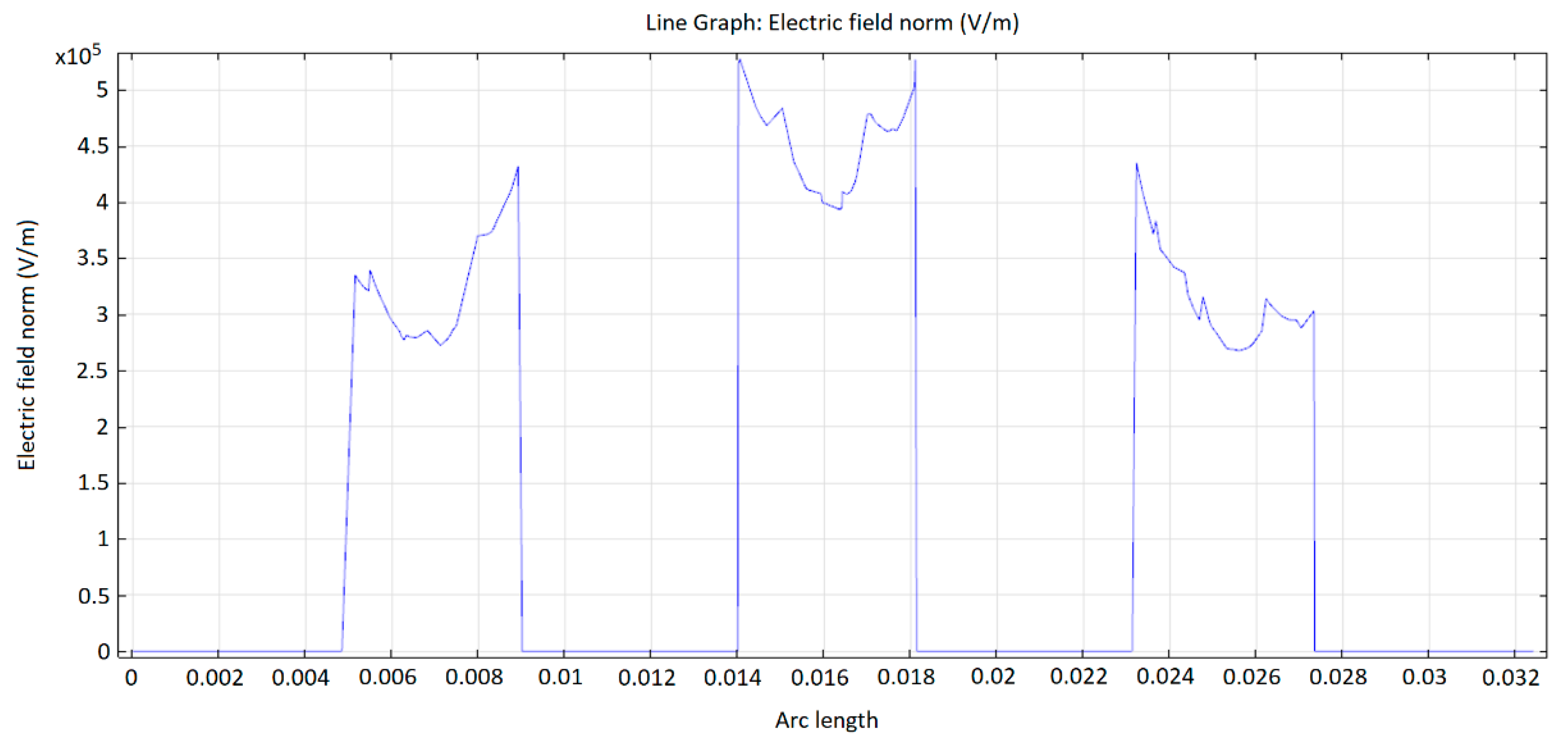
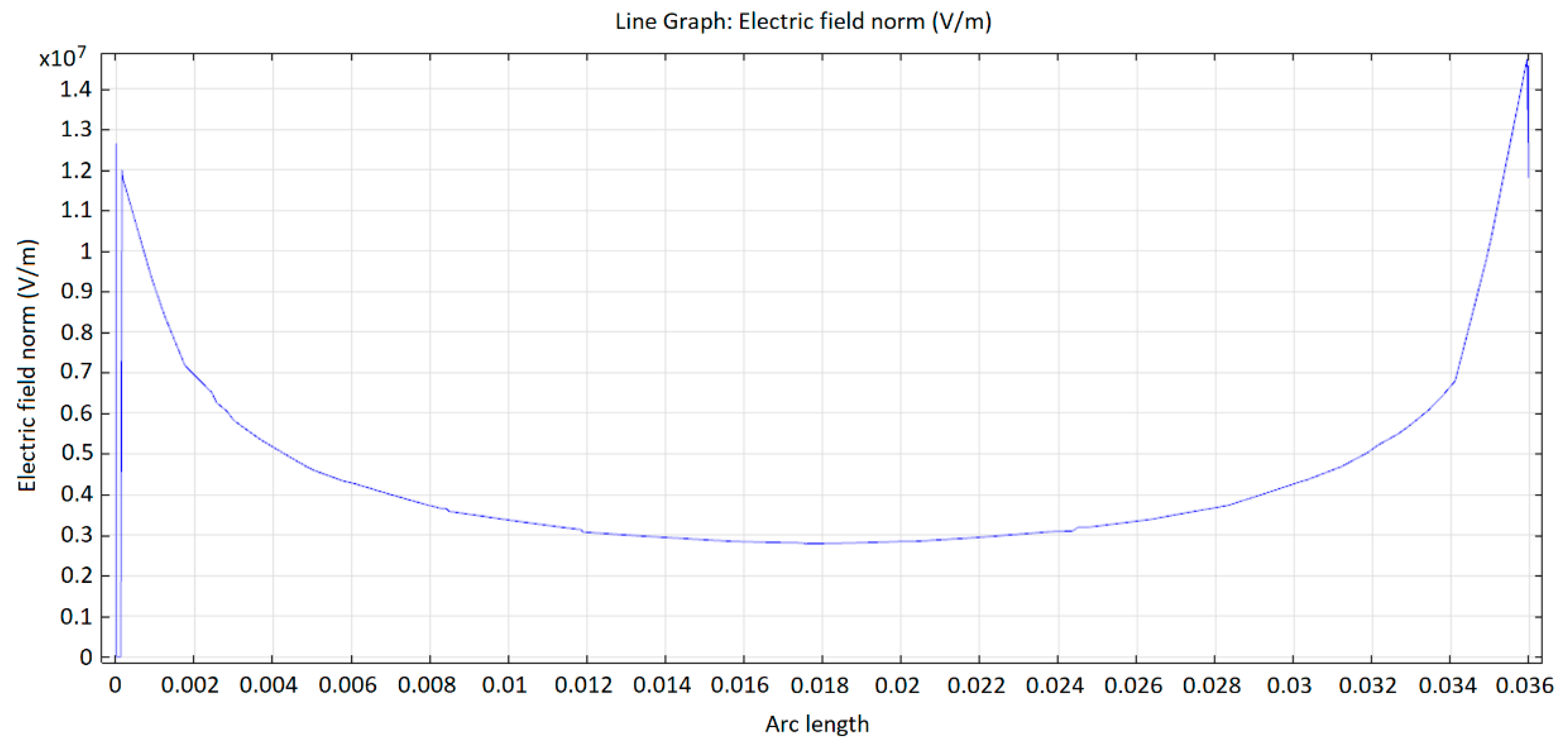
7.2. Parametric Analysis of the Electric Field
8. Validation of the Procured Simulations
9. Summary
10. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bini, R.; Galletti, B.; Iordanidis, A.; Schwinne, M. Arc-induced Turbulent Mixing in a Circuit Breaker Model. In Proceedings of the 1st International Conference on Electric Power Equipment–Switching Technology, Xi’an, China, 23–27 October 2011; pp. 375–378. [Google Scholar]
- Wang, L.; Liu, H.; Zheng, W.; Ge, C.; Guan, R.; Chen, L.; Jia, S. Numerical Simulation of Impact Effect of Internal Gas Pressure on Chamber Housing in Low-Voltage Circuit Breaker. IEEE Trans. Compon. Packag. Manuf. Technol. 2014, 4, 632–640. [Google Scholar] [CrossRef]
- Ye, X.; Dhotre, M.T.; Mantilla, J.D.; Kotilainen, S. CFD Analysis of the Thermal Interruption Process of Gases with Low Environmental Impact in High Voltage Circuit Breakers. In Proceedings of the 2015 Electrical Insulation Conference (EIC), Seattle, WA, USA, 7–10 June 2015. [Google Scholar]
- Dhotre, M.T.; Ye, X.; Seeger, M.; Schwinne, M.; Kotilainen, S. CFD Simulation and Prediction of Breakdown Voltage in High Voltage Circuit Breakers. In Proceedings of the 2017 Electrical Insulation Conference (EIC), Baltimore, MD, USA, 11–14 June 2017. [Google Scholar]
- Chen, D.G.; Li, Z.P.; Li, X.W. Simulation of pressure rise in arc chamber of MCCB during its interruption process. In Proceedings of the 53rd IEEE Holm Conference on Electrical Contacts, Pittsburgh, PA, USA, 16–19 September 2007; pp. 43–47. [Google Scholar]
- Rumpler, C.; Stammberger, H.; Zacharias, A. Low-voltage arc simulation with outgassing polymers. In Proceedings of the IEEE 57th Holm Conference on Electrical Contacts, Minneapolis, MN, USA, 11–14 September 2011; pp. 1–8. [Google Scholar]
- Li, Z. Research of Gas Dynamic Problems in Arc Chamber of Low-Voltage Circuit Breaker. Ph.D. Dissertation, Department Electrical Engineering, Xi’an Jiaotong University, Xi’an, China, 2006. [Google Scholar]
- Lindmayer, M. Complete simulation of moving arc in low voltage switchgear. In Proceedings of the 14th International Conference Gas Discharge Applications, Liverpool, UK, 2–6 September 2002; pp. 318–324. [Google Scholar]
- Nordborg, H.; Iordanidis, A. Self-consistent radiation based modelling of electric arcs. Part I: Efficient radiation approximations. J. Phys. D Appl. Phys. 2008, 41, 135205. [Google Scholar] [CrossRef]
- Iordanidis, A.; Franck, C.M. Self-consistent radiation based simulation of electric arcs. Part II: Application to gas circuit breakers. J. Phys. D Appl. Phys. 2008, 41, 135206. [Google Scholar]
- Holm, R. Electric Contacts-Theory and Application; Springer: New York, NY, USA, 1958. [Google Scholar]
- Basse, N.P.T.; Bini, R.; Seeger, M. Measured turbulent mixing in a small-scale circuit breaker model. Appl. Opt. 2009, 48, 6381–6391. [Google Scholar] [CrossRef] [PubMed]
- Incropera, F.P.; DeWitt, D.P.; Bergman, T.L.; Lavine, A.S. Introduction to Heat Transfer, 5th ed.; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- Muller, P.T. Macroscopic Electro Thermal Simulation of Contact Resistances. Bachelor’s Thesis, RWTH Aachen University, Aachen, Germany, 2016. [Google Scholar]
- Kumar, P.; Kale, A. 3-Dimensional CFD simulation of an internal arc in various compartments of LV/MV Switchgear. In Proceedings of the ANSYS Convergence Conference 2016, Pune, India, 23 August 2016. [Google Scholar]
- Wu, Y.; Li, M.; Rong, M.; Yang, F.; Murhpy, A.B.; Wu, Y.; Yuan, D. Experimental and theoretical study of internal fault arc in a closed container. J. Phys. D Appl. Phys. 2014, 47, 505204. [Google Scholar] [CrossRef]
- Kulas, S.; Kolimas, Ł.; Piskała, M. Electromagnetic forces on contacts. In Proceedings of the 2008 43rd International Universities Power Engineering Conference, Padova, Italy, 1–4 September 2008. [Google Scholar]
- Christen, T. Radiation and nozzle ablation models for CFD simulations of gas circuit breakers. In Proceedings of the 1st International Conference on Electric Power Equipment–Switching Technologies, Xi’an, China, 23–27 October 2011. [Google Scholar]
- Bini, R.; Basse, N.T.; Seeger, M. Arc-induced Turbulent Mixing in a Circuit Breaker Model. J. Phys. D Appl. Phys. 2011, 44, 025203. [Google Scholar] [CrossRef]
- Biao, W.; Yanyan, L.; Xiaojun, Z. Study on detection technology of the contact pressure on the electrical contacts of relays. In Proceedings of the 26th International Conference on Electrical Contacts (ICEC 2012), Beijing, China, 14–17 May 2012; pp. 161–164. [Google Scholar]
- Shing, A.W.C.; Pascoschi, G. Contact wire wear measurement and data management. In Proceedings of the IET International Conference on Railway Condition Monitoring, Birmingham, UK, 29–30 November 2006; pp. 182–187. [Google Scholar]
- Kriegel, M.; Zhu, X.; Digard, H.; Feitoza, S.; Glinkowski, M.; Grund, A.; Kim, H.K.; Roldan, J.L.; Robin-Jouan, P.; Sluis, L.; et al. Simulations and Calculations as verification tools for design and performance of high voltage equipment. In Proceedings of the CIGRE Conference 2008, Paris, France, 25–28 August 2008; p. A3-210. [Google Scholar]
- Siemens Product Catalogs. Available online: https://publikacje.siemens-info.com (accessed on 21 June 2020).
- Tu, Z.; Zhu, K.; Lv, Y. Tulip Contact and Electrical Contact System for Switching Device. U.S. Patent 8,641,837 B2, 4 February 2014. [Google Scholar]




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Engineering Data | Copper | Steel | Unit |
|---|---|---|---|
| Density | 8300 | 7850 | (kg/m3) |
| Young’s Modulus | 1.10 × 1011 | 2.00 × 1011 | (Pa) |
| Poisson’s Ratio | 0.34 | 0.3 | |
| Bulk Modulus | 1.15 × 1011 | 1.67 × 1011 | (Pa) |
| Shear Modulus | 4.10 × 1010 | 7.69 × 1011 | (Pa) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Łapczyński, S.; Szulborski, M.; Gołota, K.; Kolimas, Ł.; Kozarek, Ł. Mechanical and Electrical Simulations of the Tulip Contact System. Energies 2020, 13, 5059. https://doi.org/10.3390/en13195059
Łapczyński S, Szulborski M, Gołota K, Kolimas Ł, Kozarek Ł. Mechanical and Electrical Simulations of the Tulip Contact System. Energies. 2020; 13(19):5059. https://doi.org/10.3390/en13195059
Chicago/Turabian StyleŁapczyński, Sebastian, Michał Szulborski, Karol Gołota, Łukasz Kolimas, and Łukasz Kozarek. 2020. "Mechanical and Electrical Simulations of the Tulip Contact System" Energies 13, no. 19: 5059. https://doi.org/10.3390/en13195059
APA StyleŁapczyński, S., Szulborski, M., Gołota, K., Kolimas, Ł., & Kozarek, Ł. (2020). Mechanical and Electrical Simulations of the Tulip Contact System. Energies, 13(19), 5059. https://doi.org/10.3390/en13195059