Performance Analysis and Optimization of Power Density Enhanced PMSM with Magnetic Stripe on Rotor



Abstract
:1. Introduction
2. Novel Rotor Structure with Magnetically Conductive Strips
2.1. Analysis of the Existing Rotor Structure Characteristics of SMPM
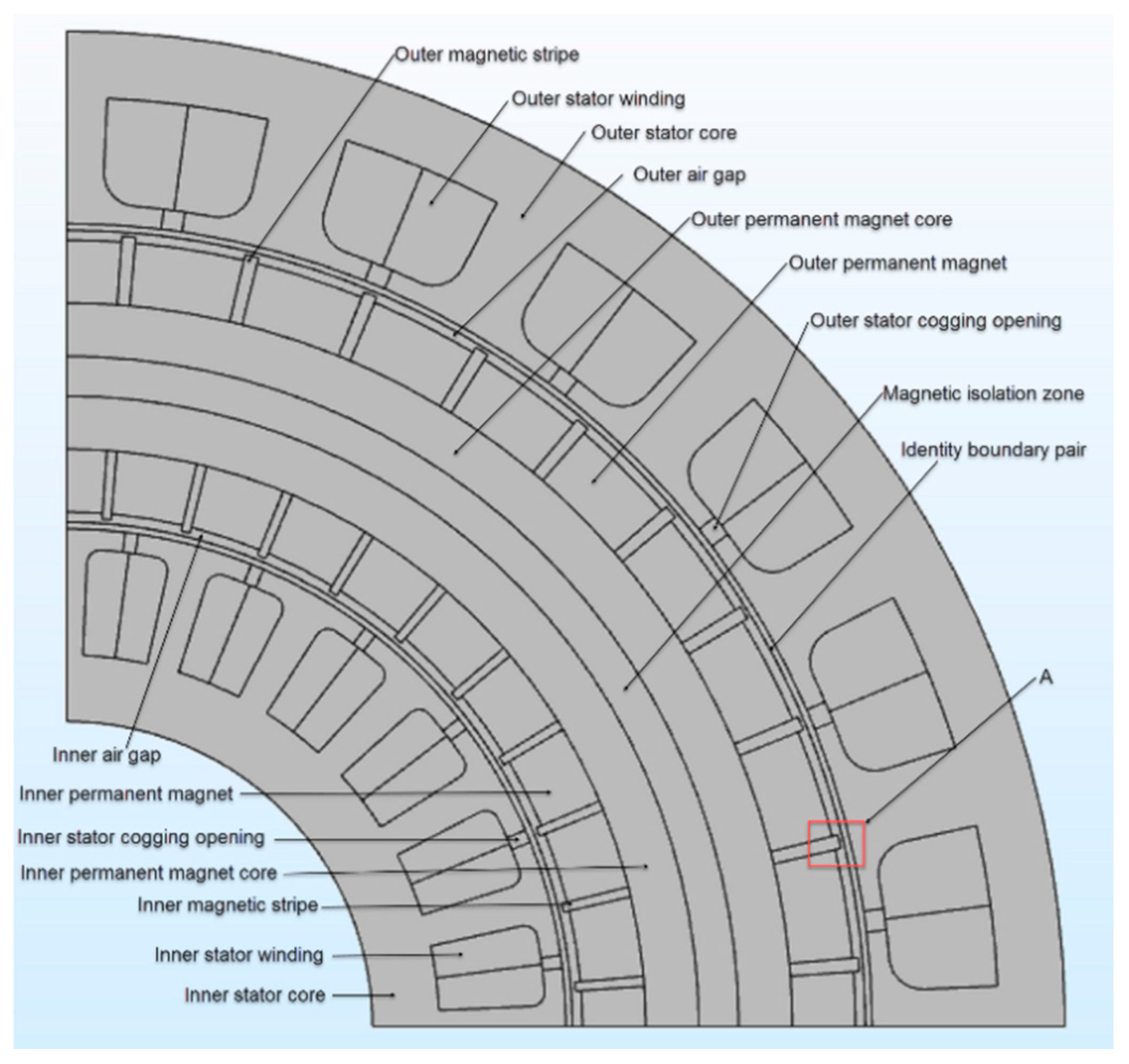
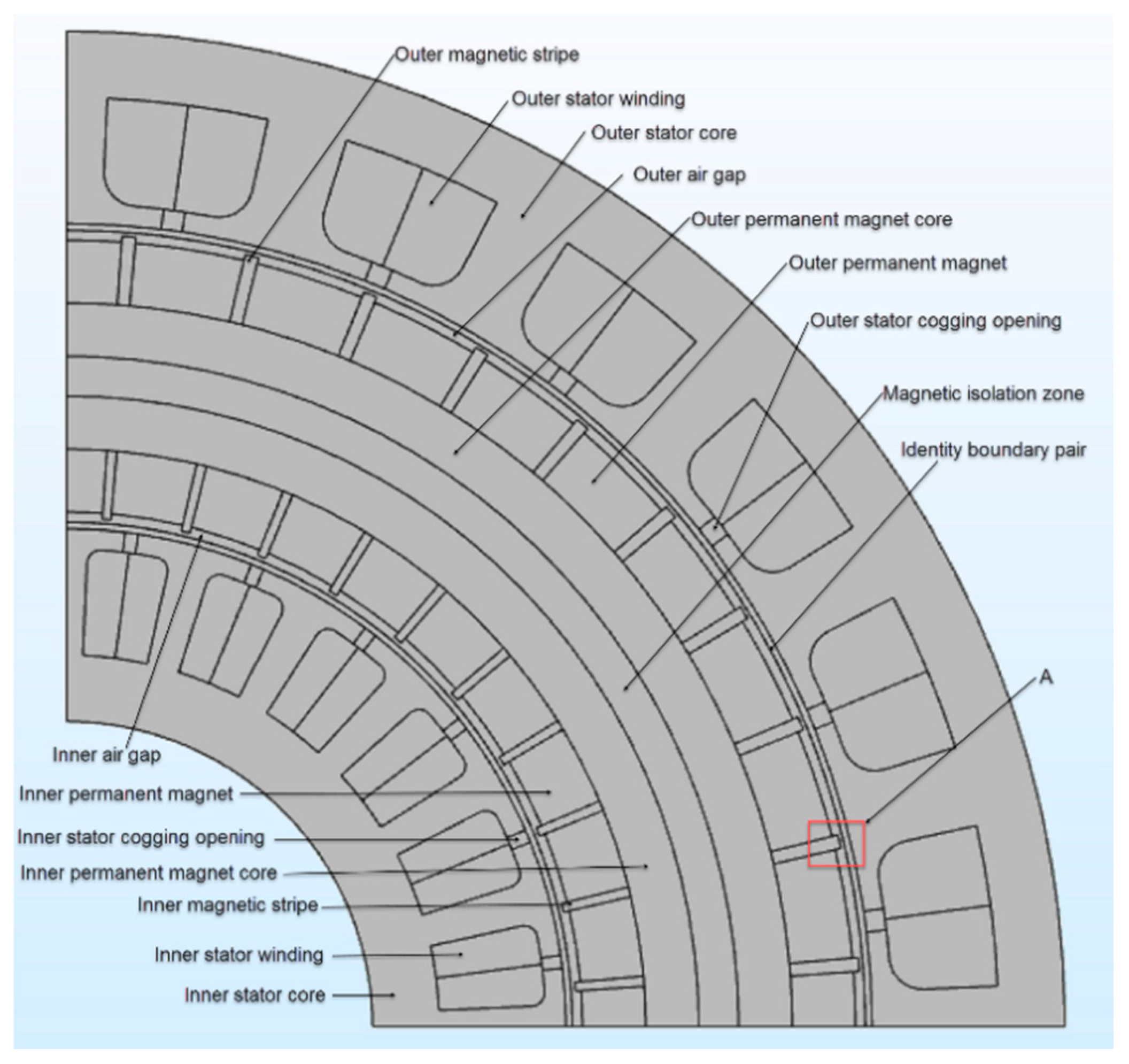
2.2. Novel Rotor Structure and Work Principle
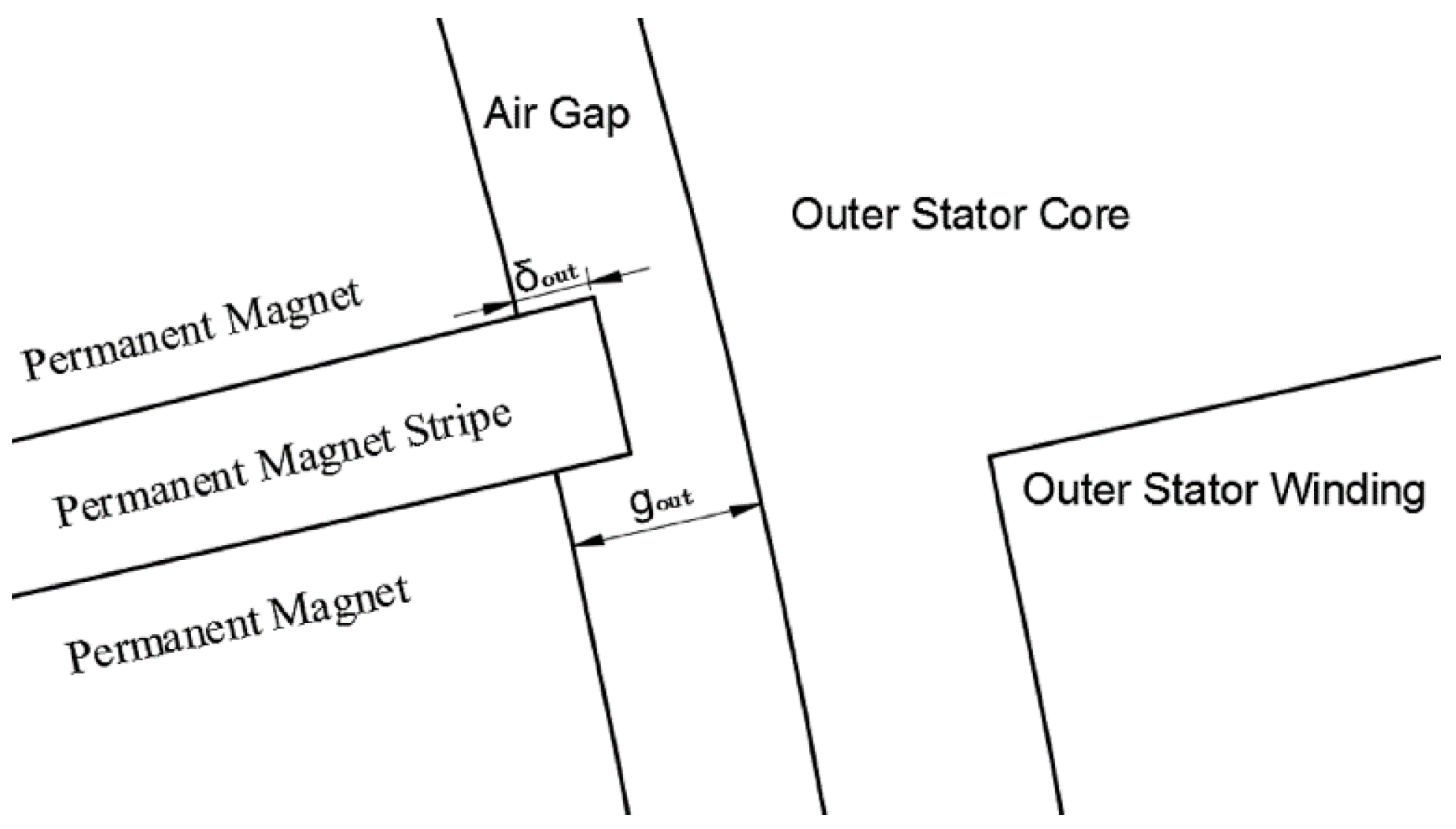
2.3. Structural Parameters and Characteristics
3. Modeling and Analysis of PMSM with Magnetic Stripe on Rotor
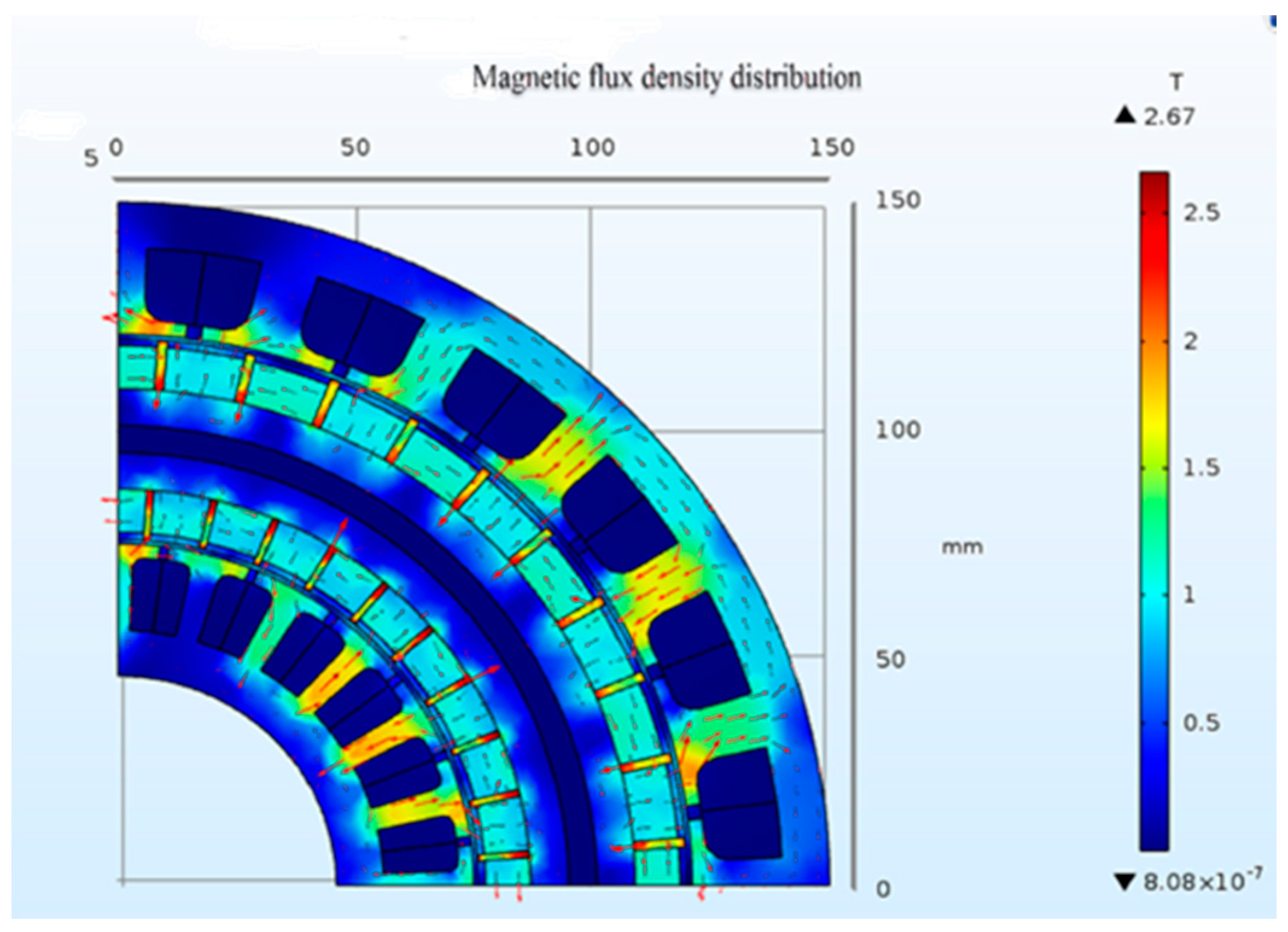
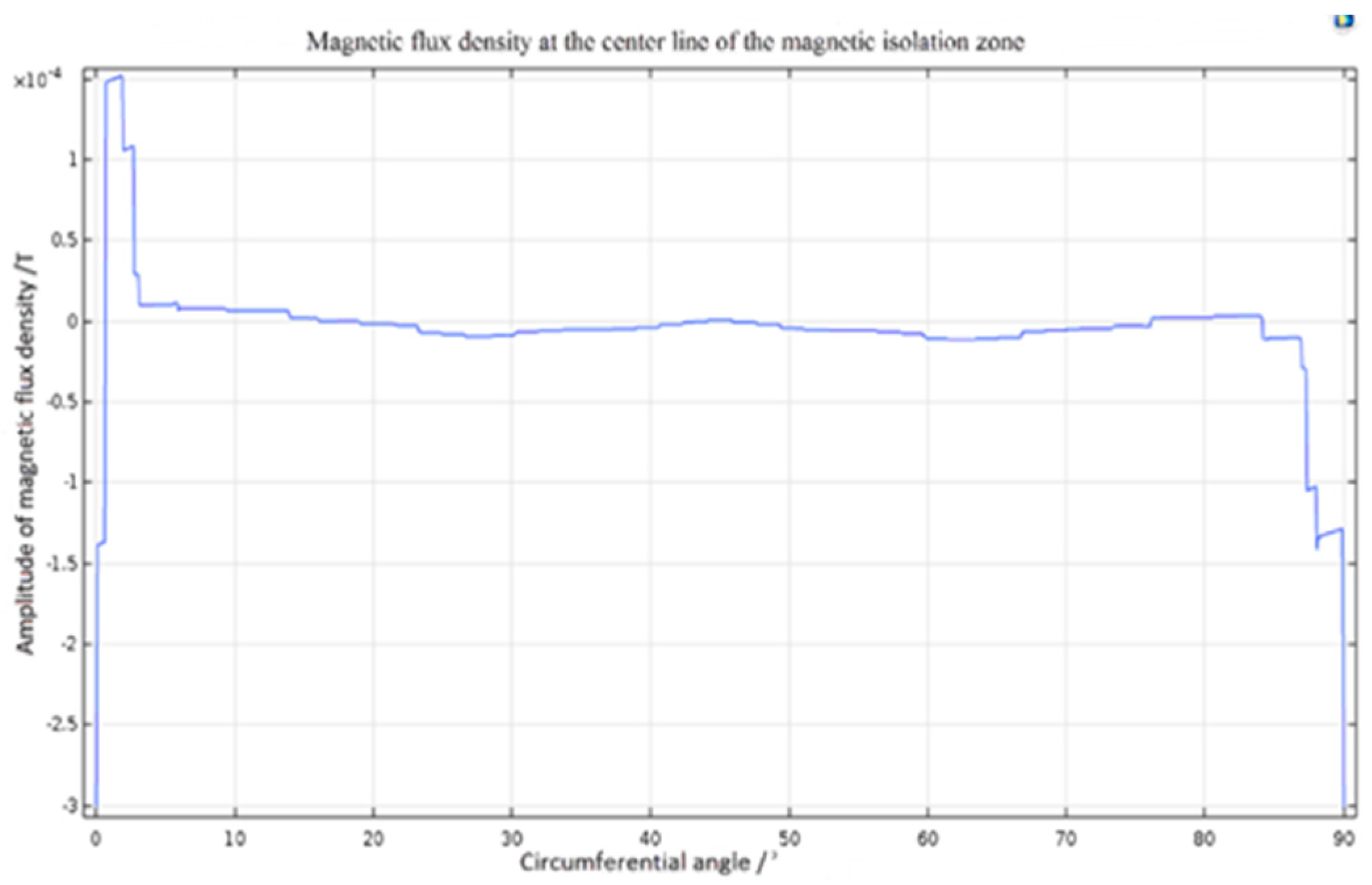
3.1. Modeling of PMSM with Rotor with Magnetic Stripe Structure
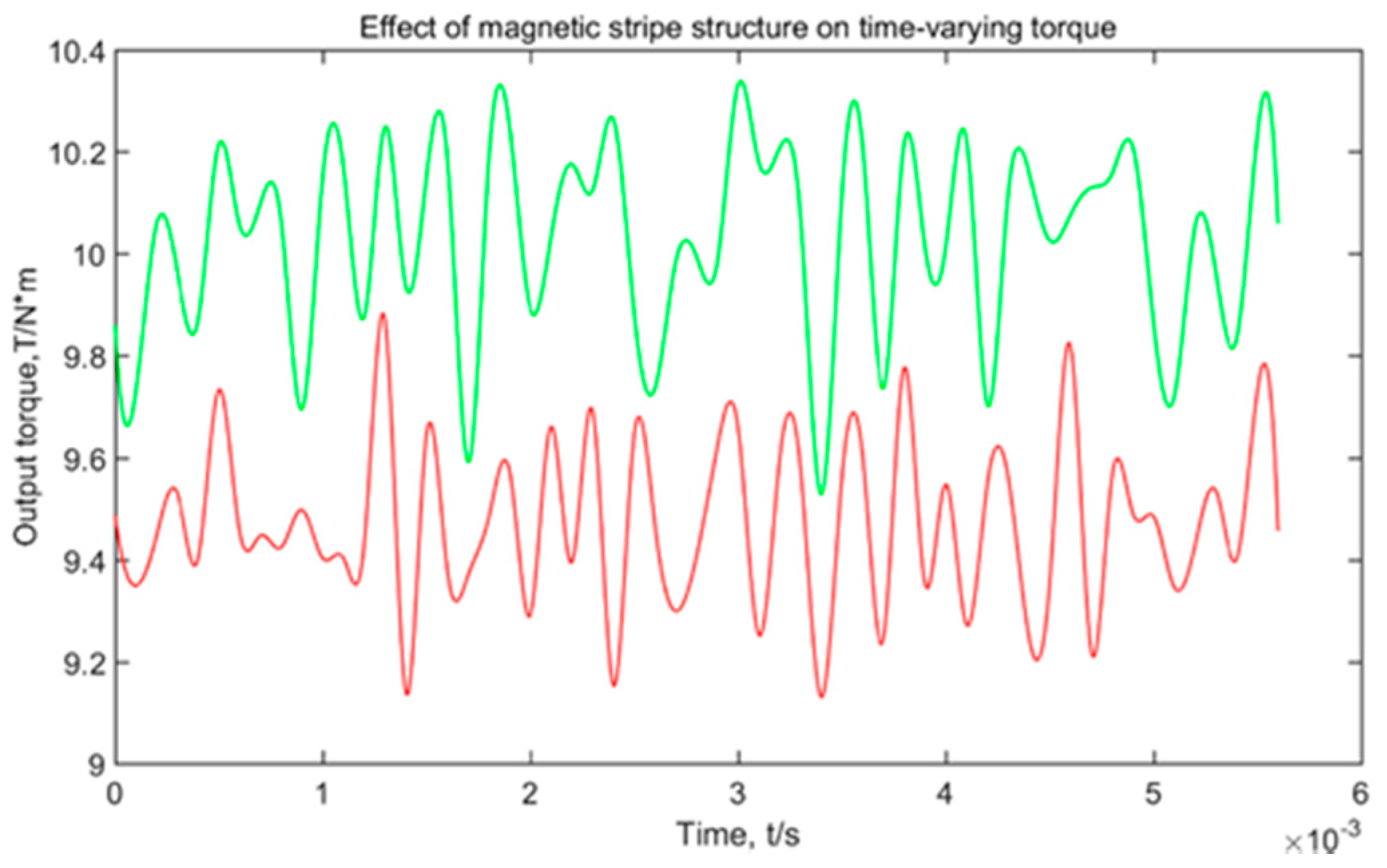
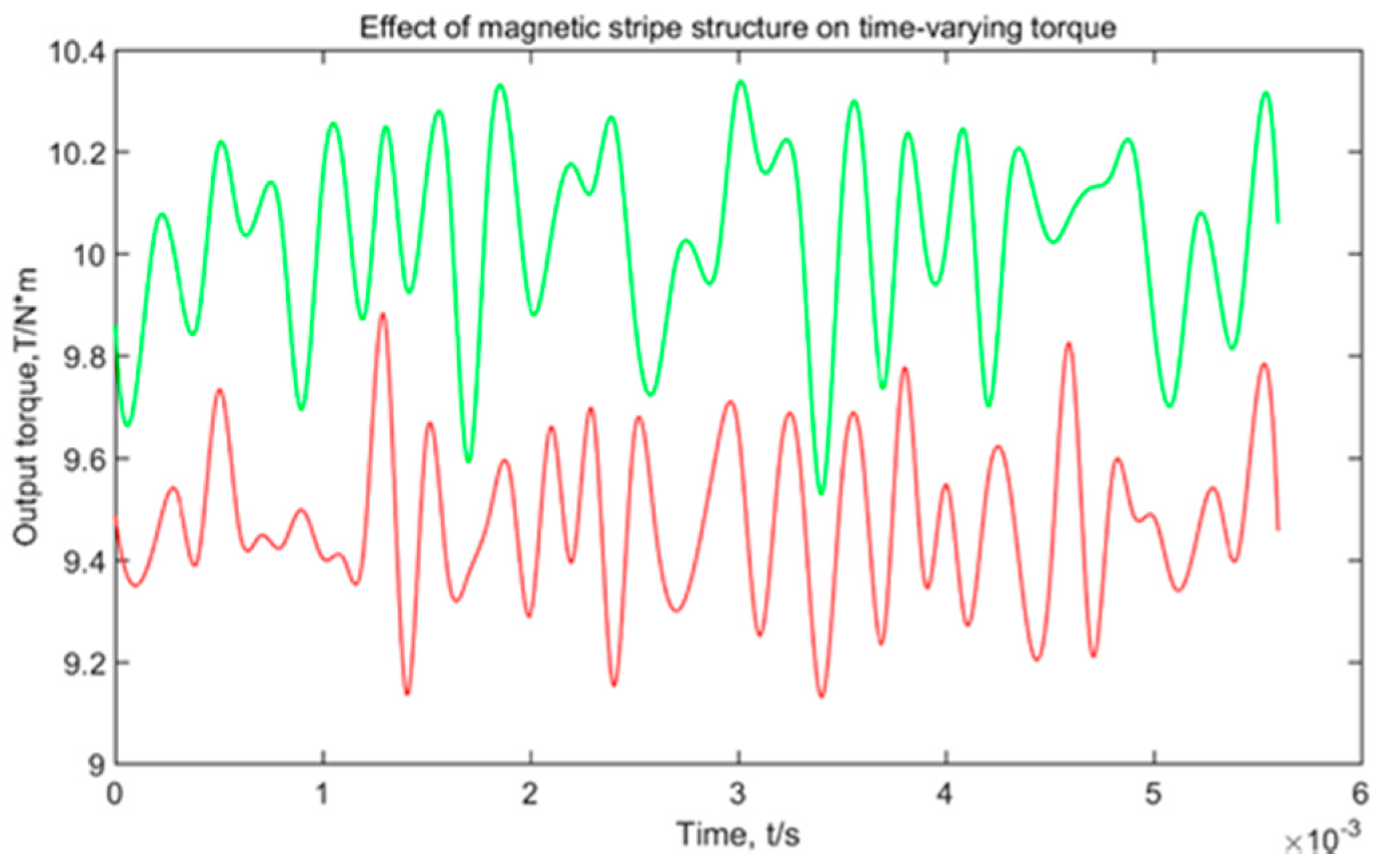
3.2. Torque Calculation and Comparative Analysis
4. Torque Performance Analysis of Novel Rotor Structure
4.1. Analysis of the Coupling Relationship between the Air Gap Proportionality Coefficients
4.2. Relationship between Air Gap Proportional Coefficient and Torque Performance
5. Structural Parameter Optimization of Novel Rotor Structure
5.1. Optimization Model and Procedure
- (1)
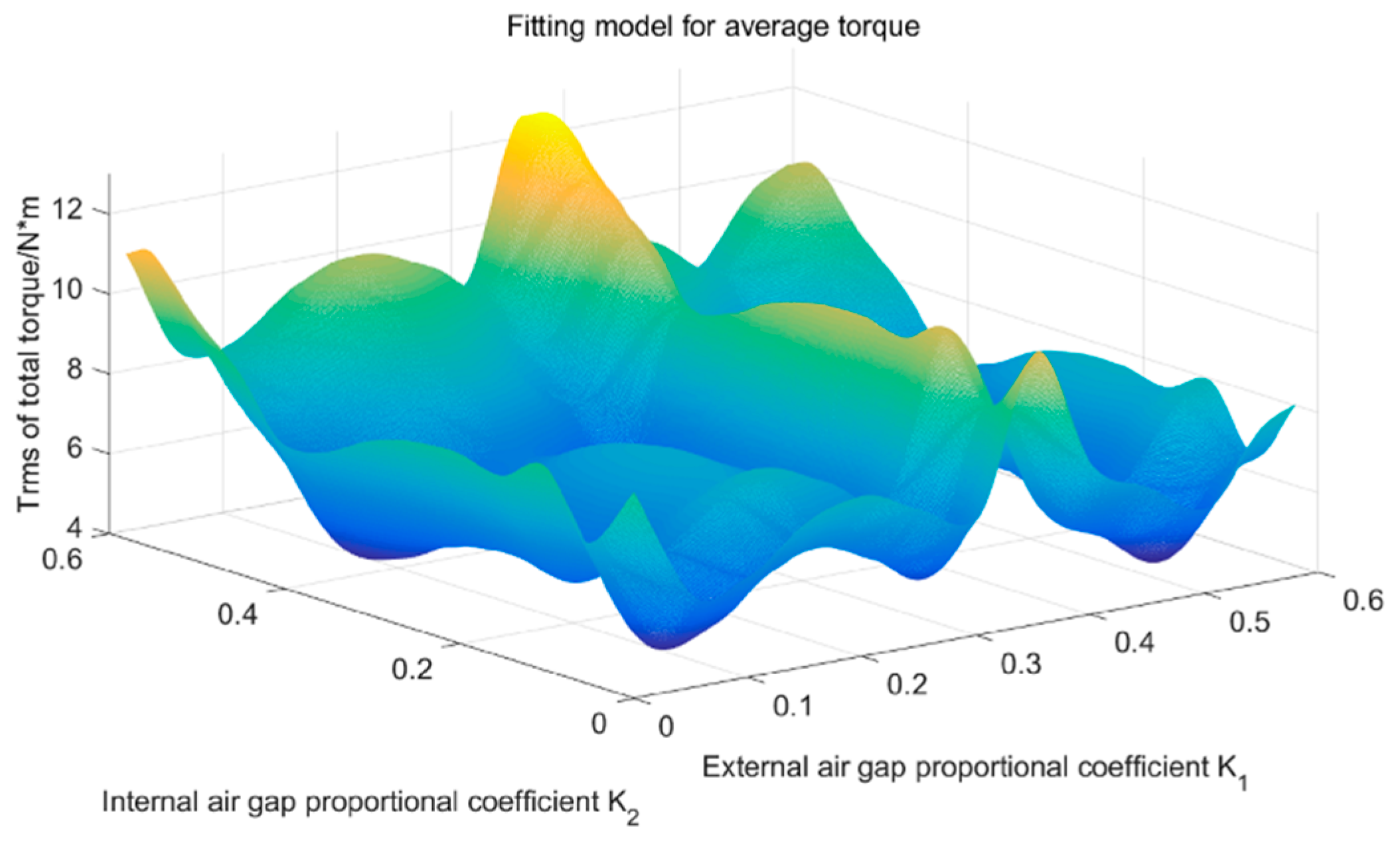
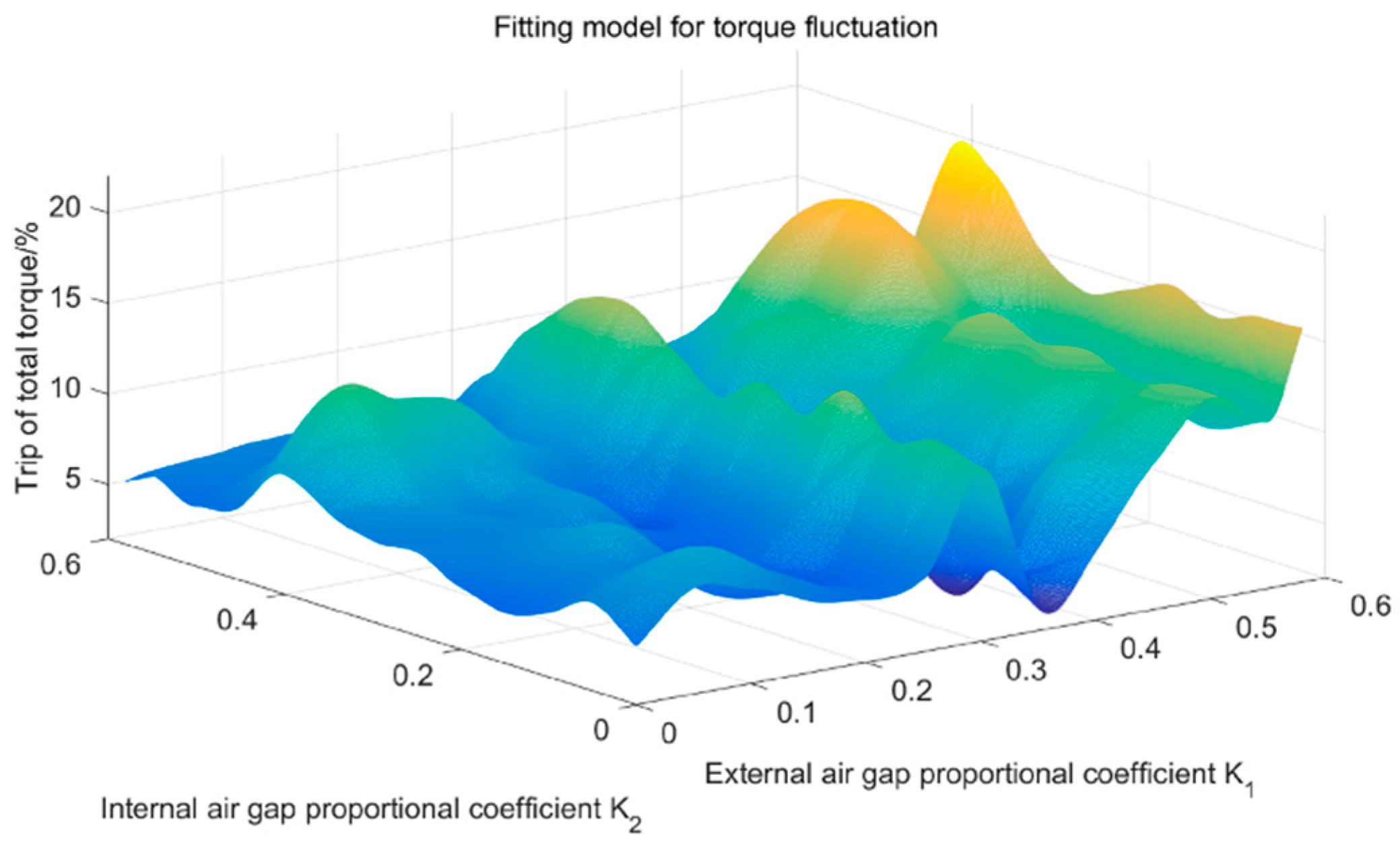
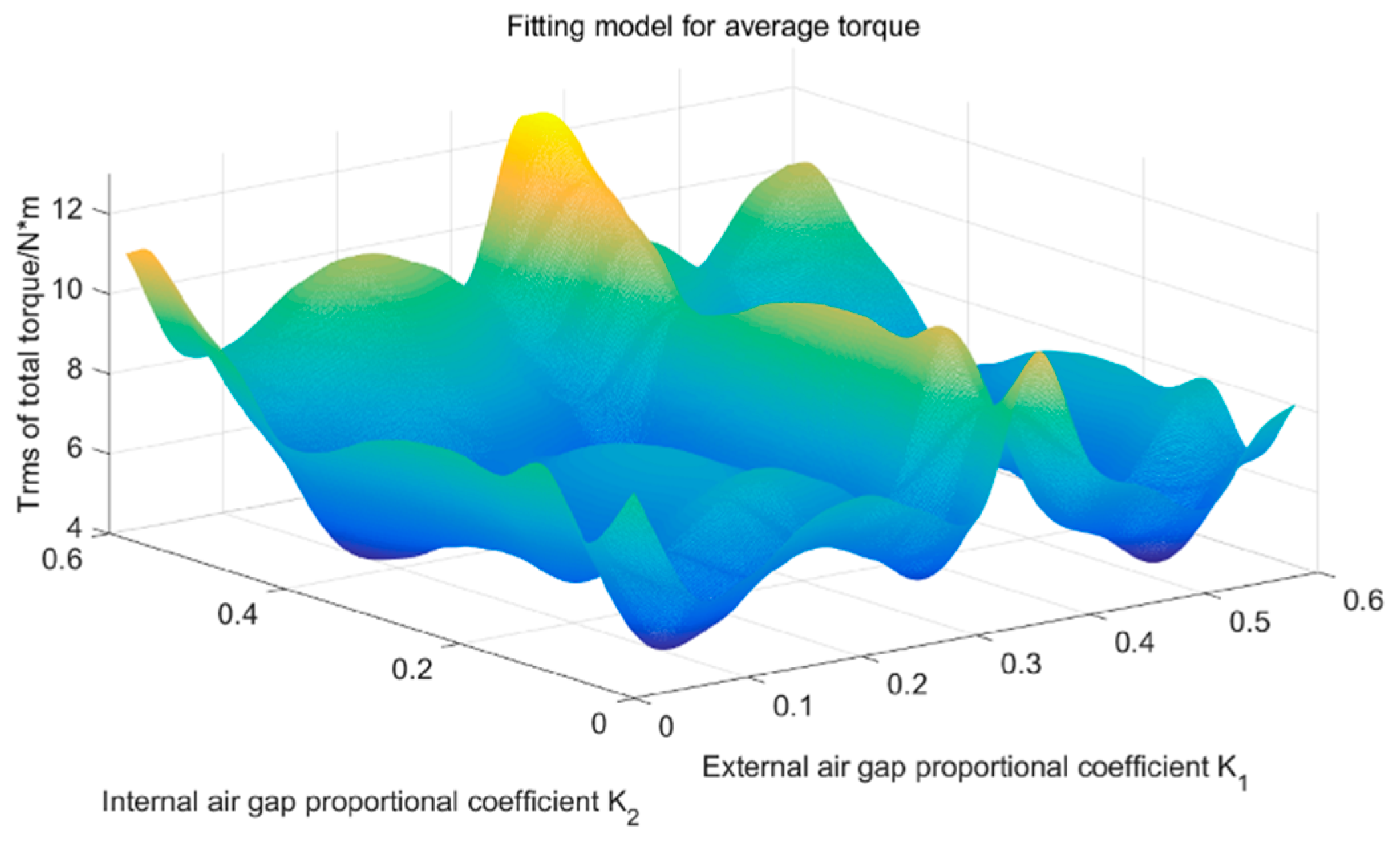
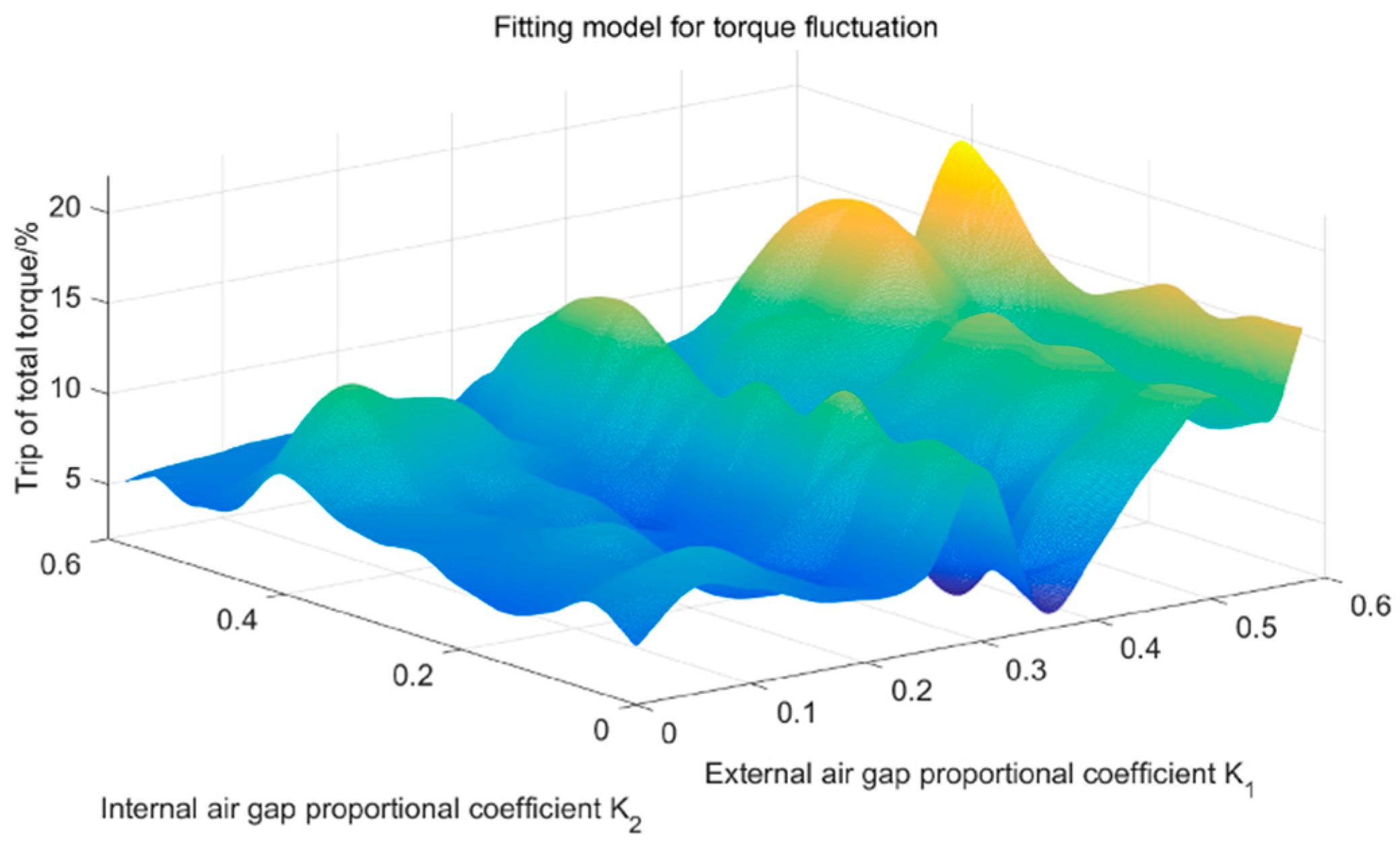
- Draw three-dimensional fitting graph of K1 and K2 and the average torque of the total torque, and the three-dimensional fitting graph of K1 and K2 and the torque fluctuation of the total torque. Since K1 and K2 are two independent variables, and the data of the internal torque and external torque change over time, the internal torque and external torque can be added based on time, and then the average torque of the total torque and torque fluctuation of the total torque under the combination of (K1, K2) can be obtained according to the Equations (3) and (4) Finally, the three-dimensional fitting graph of K1 and K2 and the average torque of the total torque can be obtained, as shown in Figure 8. Similarly, the three-dimensional fitting graph of K1 and K2 and the torque fluctuation of the total torque can be obtained, as shown in Figure 9.
- (2)
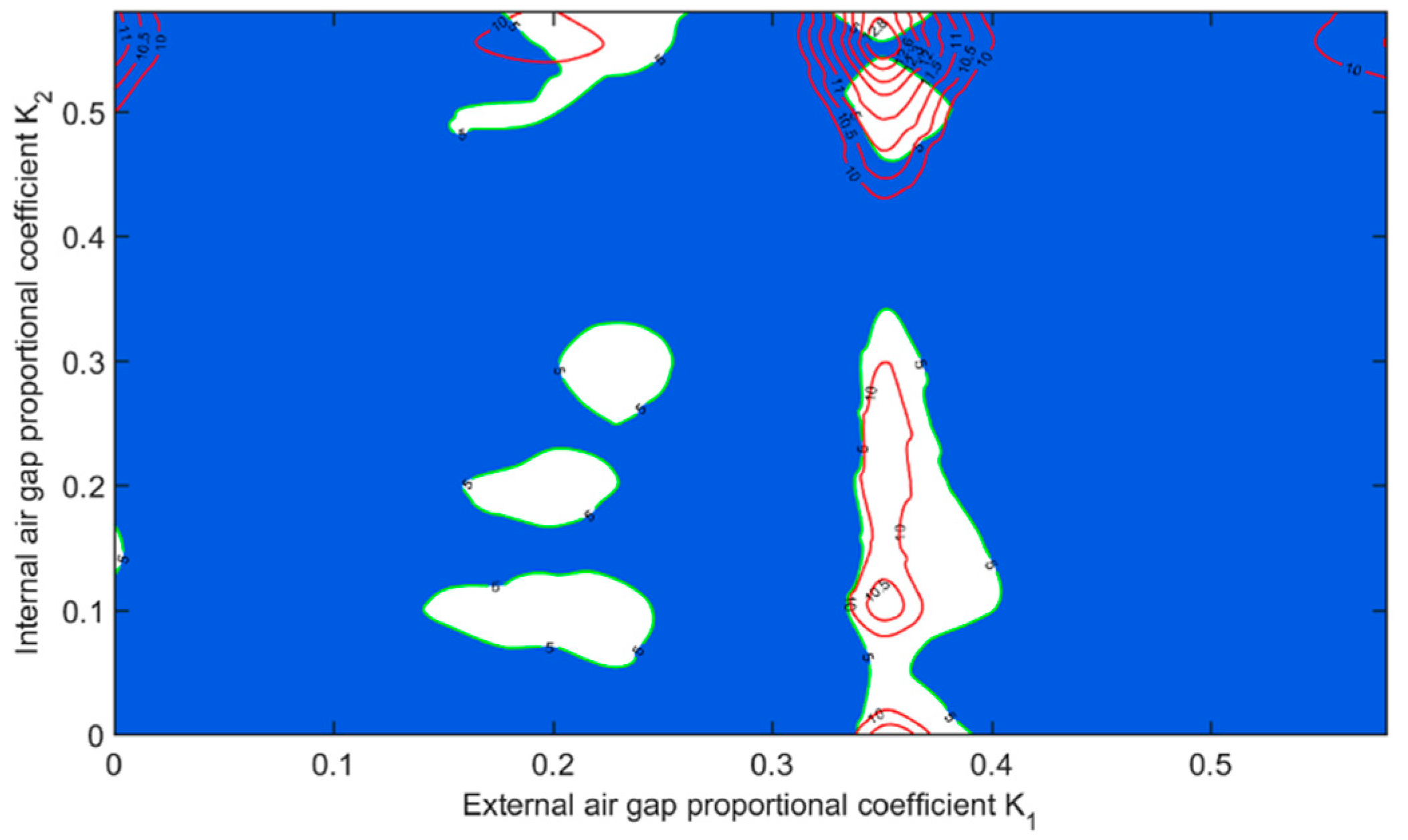
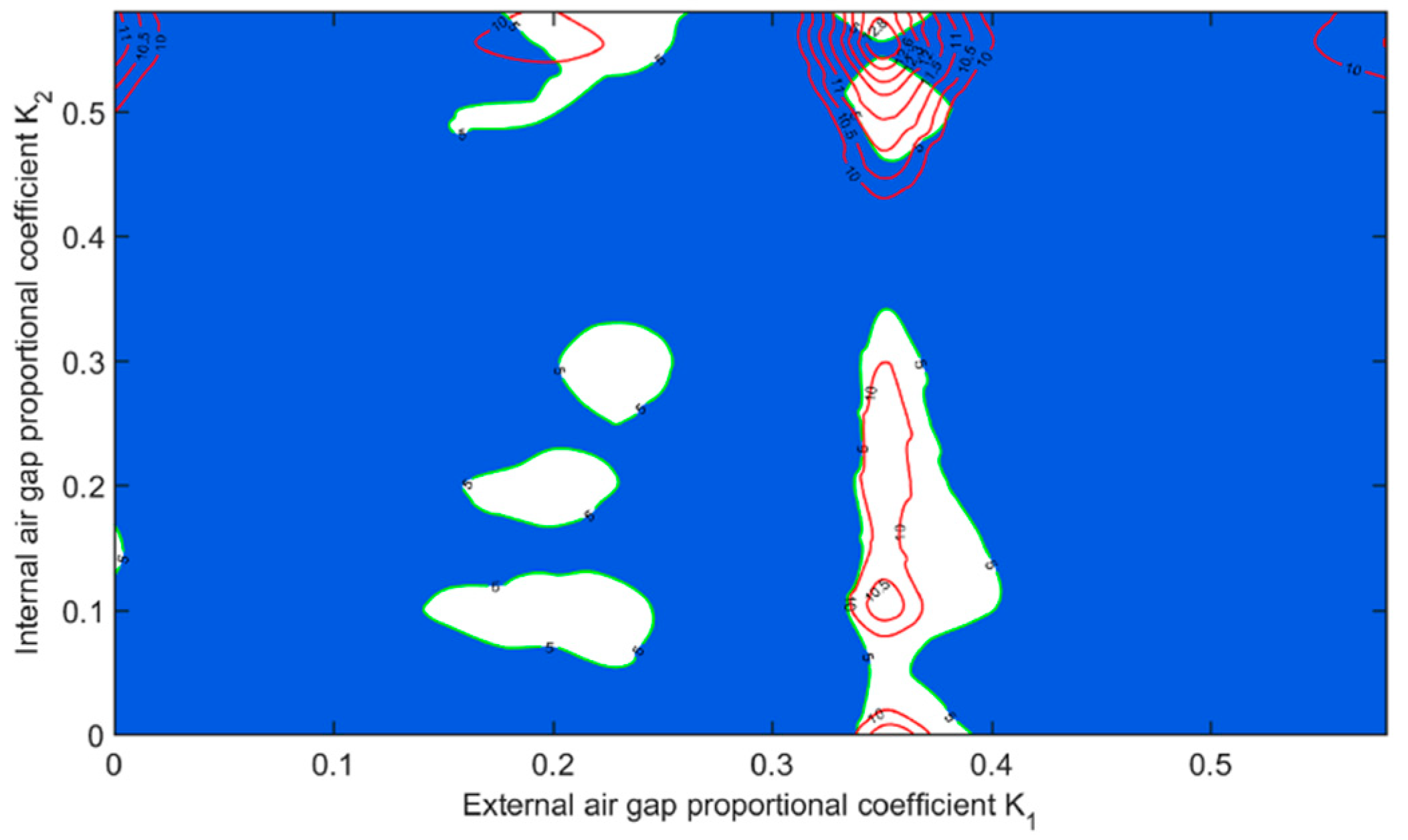
- Get the feasible region X. Add the constraint Trip ≤ 5% based on the previous steps; the feasible region X of (K1, K2) can be obtained, as shown by the white area in Figure 10.
- (3)
- Get the optimal solution. The maximum value in the corresponding value range can be obtained, when the feasible region X is taken as the definition domain, by the graphical method shown in Figure 10, in which the contours of average torque can be used to find the maximum value in the feasible region X, or by numerical method. The maximum value of the average torque of the total torque is obtained when Trip ≤ 5% is satisfied.
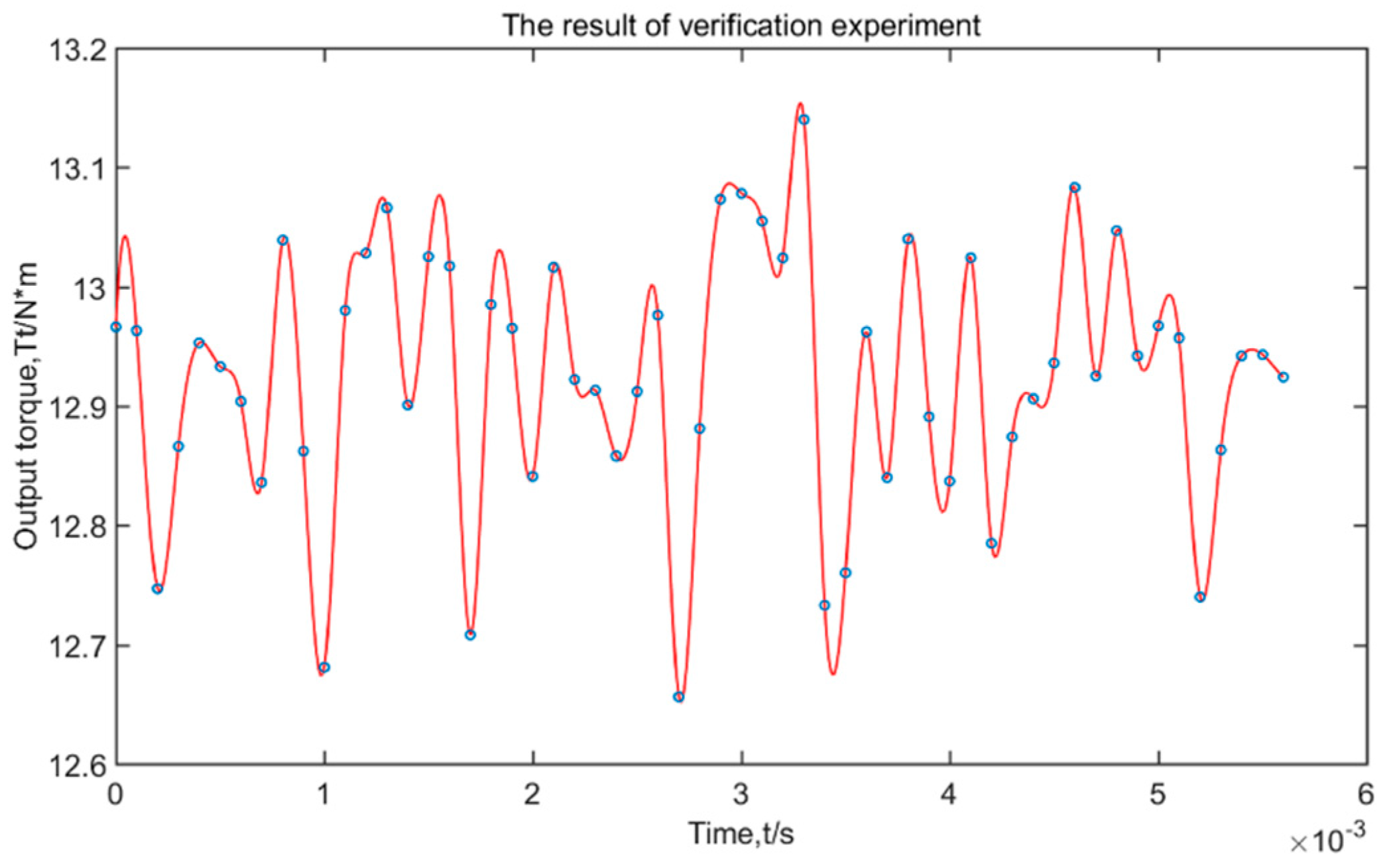
5.2. Optimization Results and Verification
6. Conclusions
- (1)
- The structure of the rotor with magnetic stripes has a significant effect on the improvement of the average torque of the motor. Compared with the average torque of the non-magnetic stripe structure, when the magnetic stripe structure is taken as K1 = K2 = 0.55, the average torque increases by 5.87%.
- (2)
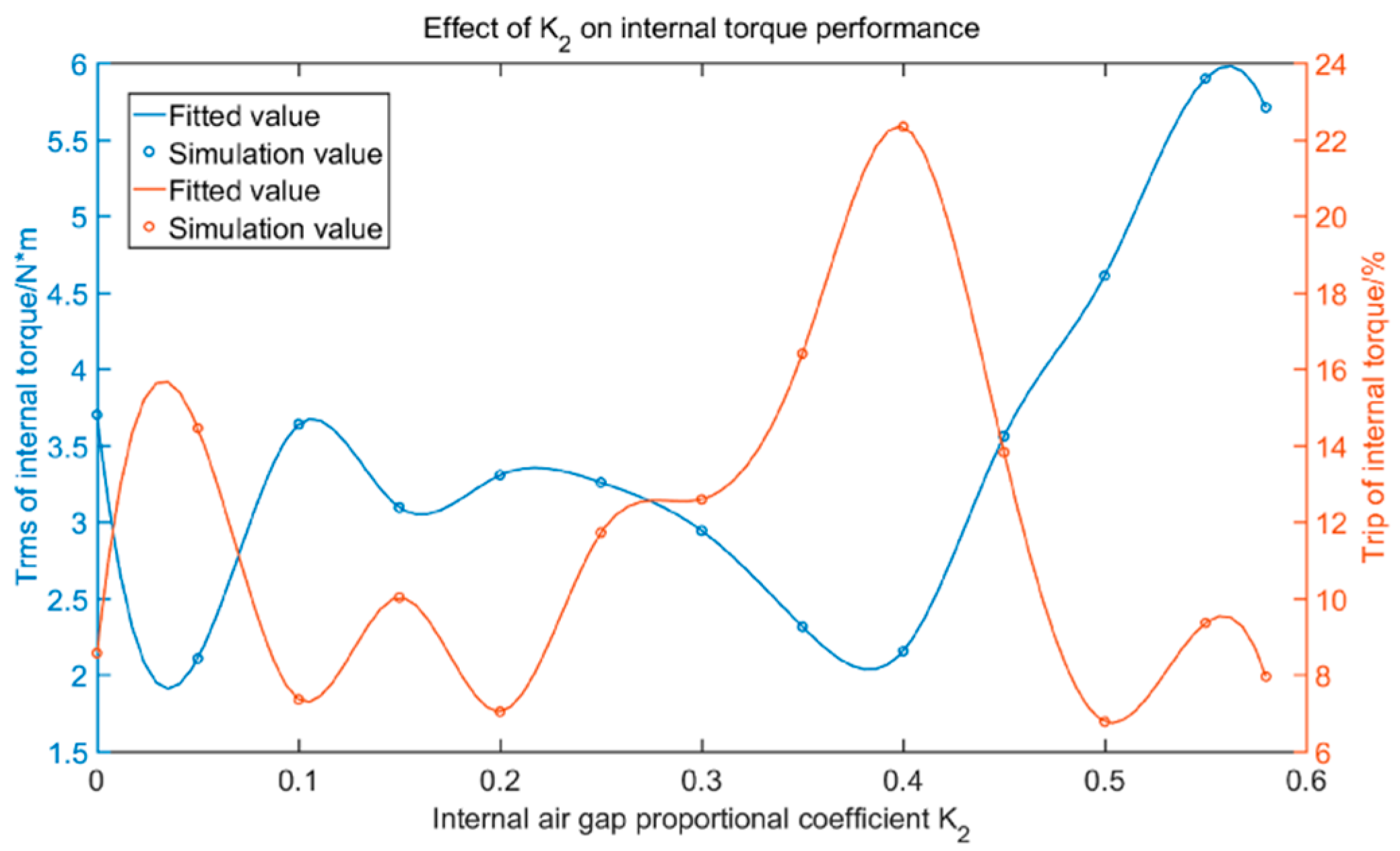
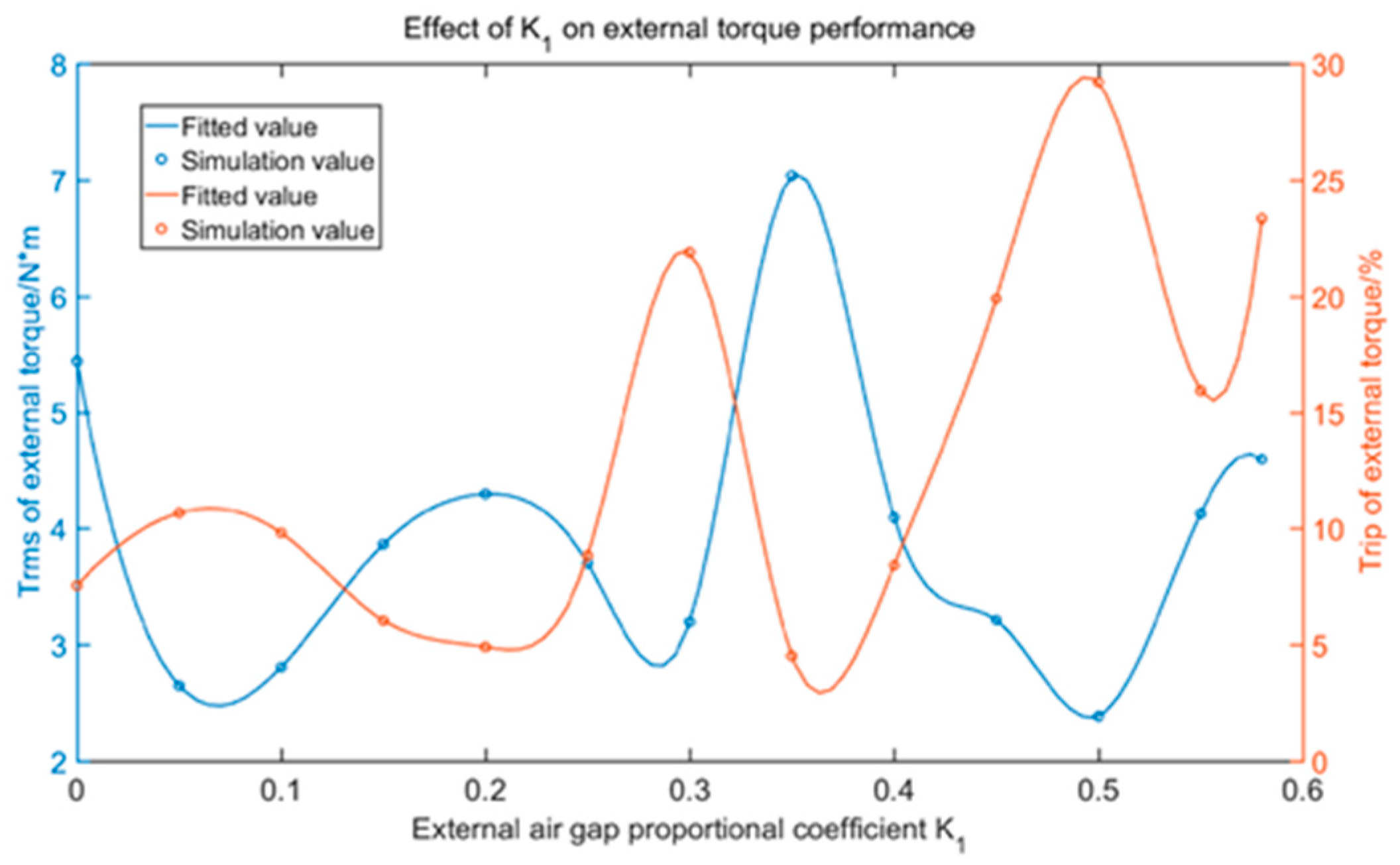
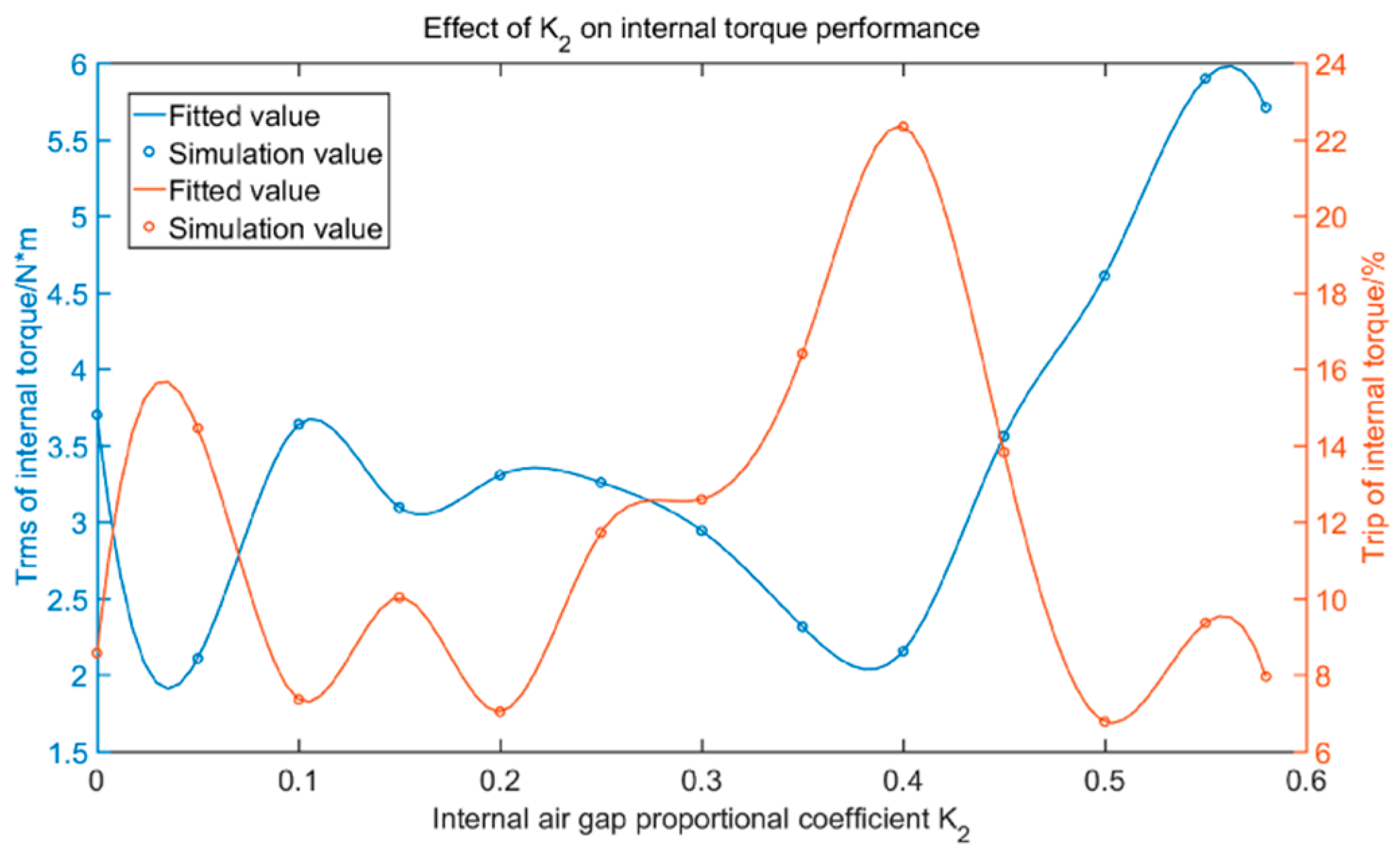
- The relationship between the air gap proportional coefficient and the torque performance is very close, and the average torque of the external and internal torque has a peak value. When the external air gap proportional coefficient K1 falls near 0.35, the average torque of the external torque reaches a peak value, and when the internal air-gap proportional coefficient K2 falls near 0.55, the average torque of the internal torque reaches a peak value, as shown in Figure 6 and Figure 7.
- (3)
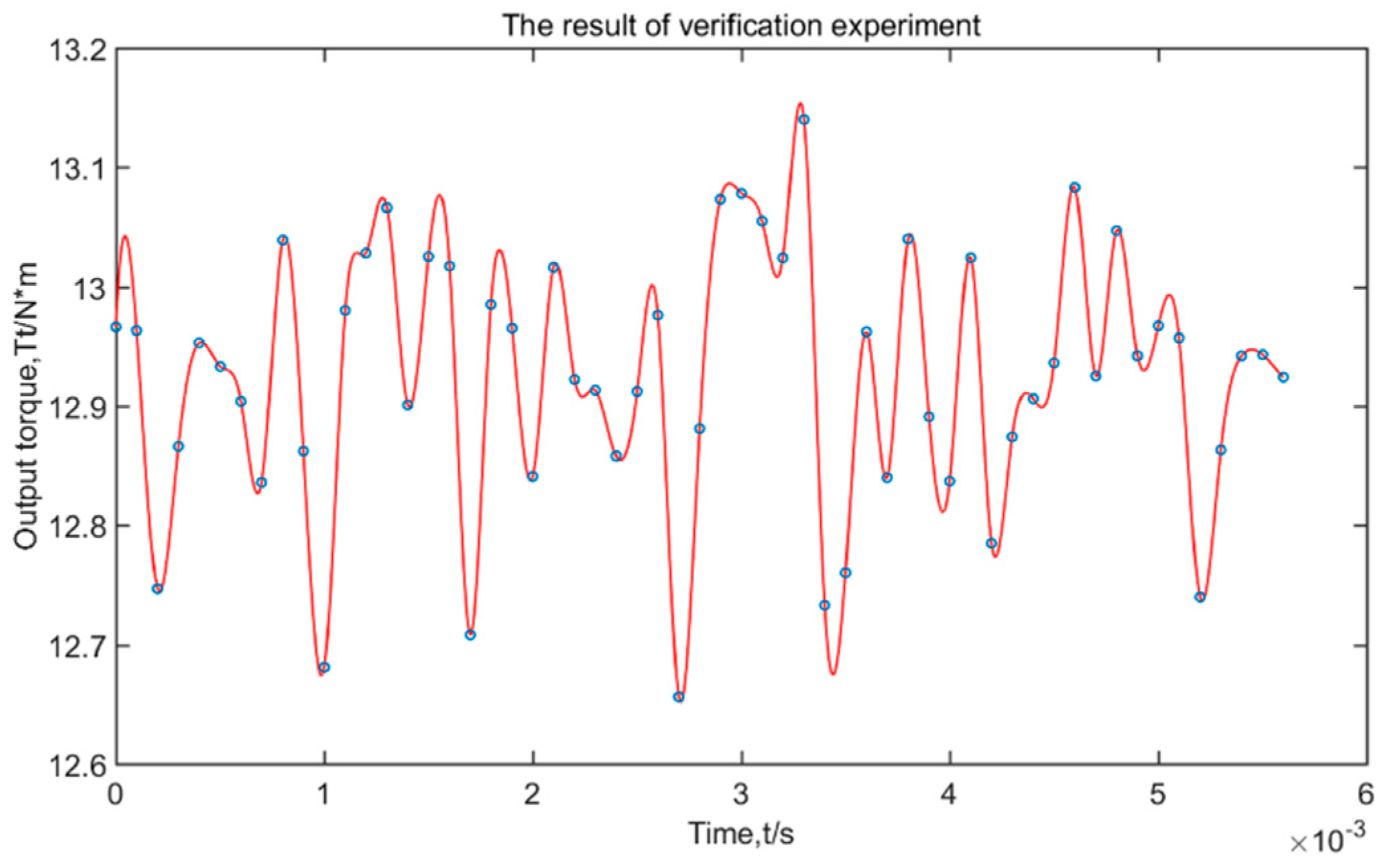
- The optimization method is proposed for a novel rotor structure with magnetic stripes. Take K1 and K2 as optimization variables, and take Trip as the total torque with no more than 5% as a constraint, and take the maximum average torque as the optimization goal. The optimization results show that under the premise that Trip ≤ 5%, the average torque of the PMSM with magnetic stripes has the biggest increase when (K1, K2) = (0.35, 0.5560). It can reach 12.9244 N·m, increases by 28.89% compared with the average torque of the PMSM without optimization, and the optimization method proposed is efficient. After parameter optimization, the power density of the PMSM was further enhanced. In the example, the thickness of the air gap is taken as 2.5 mm, when the thickness of the air gap is taken to be smaller, the average torque can be increased, but its increment can be reduced.
Author Contributions
Funding
Conflicts of Interest
References
- El-Refaie, A.; Osama, M. High Specific Power Electrical Machines: A System Perspective. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017; pp. 1–6. [Google Scholar]
- Zhang, X.; Haran, K.S. High-Specific-Power Electric Machines for Electrified Transportation Applications-Technology Options. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Luongo, C.; Masson, P.; Nam, T.; Mavris, D.; Kim, H.; Brown, G.; Waters, M.; Hall, D. Next Generation More-Electric Aircraft: A Potential Application for HTS Superconductors. IEEE Trans. Appl. Supercond. 2009, 19, 1055–1068. [Google Scholar] [CrossRef]
- Kasha, A.; Lin, R.; Sudhoff, S.; Chalfant, J.; Alsawalhi, J. A Comparison of Permanent Magnet Machine Topologies for Marine Propulsion Applications. In Proceedings of the 2017 IEEE Electric Ship Technologies Symposium (ESTS), Arlington, VA, USA, 14–17 August 2017; pp. 437–444. [Google Scholar]
- Wang, A.; Jia, Y.; Soong, W.L. Comparison of Five Topologies for an Interior Permanent-Magnet Machine for a Hybrid Electric Vehicle. IEEE Trans. Magn. 2011, 47, 3606–3609. [Google Scholar] [CrossRef]
- Chen, Z.; Ma, H.; Li, Z. Rotor Parameter Analysis for Surface-Mounted and Interior Hybrid Permanent Magnet Synchronous Machine. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–5. [Google Scholar]
- Önsal, M.; Cumhur, B.; Demir, Y.; Yolacan, E.; Aydin, M. Rotor Design Optimization of a New Flux-Assisted Consequent Pole Spoke-Type Permanent Magnet Torque Motor for Low-Speed Applications. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Baoquan, K.; Chunyan, L.; Shukang, C. Flux-weakening-characteristic analysis of a new permanent magnet motor synchronous motor used for electric vehicles. IEEE Trans. Plasma Sci. 2010, 39, 511–515. [Google Scholar] [CrossRef]
- Dubois, M.R.; Trovao, J.P. EMF Waveform Optimization using the Permanent Magnet Volume-Integration Method. CES Trans. Electr. Mach. Syst. 2017, 1, 189–198. [Google Scholar] [CrossRef]
- Dubois, M.R.; Trovão, J.P.F. Motor Drive with Halbach Permanent Magnet Array for Urban Electric Vehicle Concept. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference (VPPC), Montreal, QC, Canada, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Sui, Y.; Liu, Y.; Tong, C.; Yu, B.; Cheng, L. Magnetic System Study of a Halbach Compound-Structure PMSM Used for Hybrid Electric Vehicles. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 January 2015; pp. 1173–1177. [Google Scholar]
- Galea, M.; Papini, L.; Zhang, H.; Gerada, C.; Hamiti, T. Demagnetization Analysis for Halbach Array Configurations in Electrical Machines. IEEE Trans. Magn. 2015, 51, 1–9. [Google Scholar] [CrossRef]
- Yoon, A.; Yi, X.; Martin, J.; Chen, Y.; Haran, K. A High-Speed, High-Frequency, Air-Core PM Machine for Aircraft Application. In Proceedings of the 2016 IEEE Power and Energy Conference at Illinois (PECI), Urbana, IL, USA, 19–20 February 2016. [Google Scholar]
- Golovanov, D.; Galea, M.; Gerada, C. High Specific Torque Motor for Propulsion System of Aircraft. In Proceedings of the 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Toulouse, France, 2–4 November 2016. [Google Scholar]
- Cho, S.; Jeong, G.; Liu, H.C.; Ham, S.-H.; Lee, J. Design and Performance Analysis of Outer Rotor Fan-Type PMSM for Power Density Improvement. In Proceedings of the 2016 IEEE Conference on Electromagnetic Field Computation (CEFC), Miami, FL, USA, 13–16 November 2016. [Google Scholar]
- Kasha, A.E.; Sudhoff, S.D. Multi-objective design optimization of a surface-mounted modular permanent-magnet pole machine. In Proceedings of the 2016 IEEE Power and Energy Conference at Illinois (PECI), Urbana, IL, USA, 19–20 February 2016; pp. 1–7. [Google Scholar]
- Alsawalhi, J.Y.; Sudhoff, S.D. Design Optimization of Asymmetric Salient Permanent Magnet Synchronous Machines. IEEE Trans. Energy Convers. 2016, 31, 1315–1324. [Google Scholar] [CrossRef]
- Lin, R.; Sudhoff, S.D. A Hybrid Model to Calculate Air Gap Flux Density for a V-Shape Interior Permanent Magnet Machine. In Proceedings of the 2016 IEEE Power and Energy Conference at Illinois (PECI), Urbana, IL, USA, 19–20 February 2016; pp. 1–7. [Google Scholar]
- Shi-Uk, C.; Seok-Hwan, M.; Dong-Jun, K.; Jong-Moo, K. Development of a 20Pole-24Slot SPMSM with Consequent Pole Rotor for In-Wheel Direct Drive. IEEE Trans. Ind. Electron. 2015, 63, 302–309. [Google Scholar] [CrossRef]
- Qu, H.; Zhu, Z.Q.; Li, H.Y. Analysis of Novel Consequent Pole Flux Reversal Permanent Magnet Machine. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 5223–5230. [Google Scholar]
- Yang, H.; Zhu, Z.Q.; Lin, H.; Li, H.; Lyu, S. Analysis of Consequent-Pole Flux Reversal Permanent Magnet Machine with Biased Flux Modulation Theory. IEEE Trans. Ind. Electron. 2020, 67, 2107–2121. [Google Scholar] [CrossRef]
- Zhu, Z.; Howe, D. Halbach permanent magnet machines and applications: A review. IEE Proc. Electr. Power Appl. 2001, 148, 299. [Google Scholar] [CrossRef]
- Bomme, E.; Foggia, A.; Chevalier, T. Double Air-gaps Permanent Magnet Synchronous Motors Analysis. In Proceedings of the 2018 18th International Conference on Electrical Machines(ICEM), Vilamoura, Portugal, 6–9 September 2008; pp. 1–5. [Google Scholar]
- Liu, R.; Zhao, H.; Tong, C.; Chen, G.; Zheng, P.; Gu, G. Experimental Evaluation of a Radial-Radial-Flux Compound-Structure Permanent-Magnet Synchronous Machine Used for HEVs. IEEE Trans. Magn. 2009, 45, 645–649. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value |
|---|---|
| Inner diameter of external stator | 121 mm |
| Cogging depth of inner and outer stator | 16 mm |
| Cogging width of inner and outer stator | 10° |
| Thickness of outer air gap | 2.5 mm |
| Thickness of outer permanent magnet | 10 mm |
| Thickness of outer permanent magnet core | 8 mm |
| Thickness of magnetic isolation zone | 6 mm |
| Thickness of inner permanent magnet core | 8 mm |
| Thickness of inner permanent magnet | 10 mm |
| Width of inner and outer permanent magnet | 8° |
| Thickness of inner air gap | 2.5 mm |
| Inner diameter of internal stator | 46 mm |
| Axial length | 10 mm |
| Width of inner and outer magnetic stripe | 1° |
| External air gap proportional coefficient K1 | 0.05–0.58 |
| Internal air gap proportional coefficient K2 | 0.05–0.58 |
| Parameter Name | Value |
|---|---|
| Peak current of stator winding (I_max)/A | 100 |
| Current density of stator winding (J)/A/mm2 | 10 |
| Remanence of permanent magnet (Br)/T | 1.2 |
| Speed (n)/rpm | 3000 |
| Electrical frequency of stator winding/Hz | 500 |
| Poles/slots | 20/24 |
| Performance | Rotor without Magnetic Stripe | Rotor with Magnetic Stripe |
|---|---|---|
| Trms/N·m | 9.4712 | 10.0274 |
| Trip/% | 7.80 | 8.03 |
| Performance | Result of Optimization | Result of Verification Experiment | Relative Error |
|---|---|---|---|
| Trms/N·m | 12.9730 | 12.9244 | 0.38% |
| Trip/% | 5.00 | 3.74 | - |
| Performance | Before Optimization (K1 = K2 = 0.55) | After Optimization (K1 = 0.35, K2 = 0.5560) | Improvement |
|---|---|---|---|
| Trms/N·m | 10.0274 | 12.9244 | 28.89% |
| Trip/% | 8.03 | 3.74 | −52.42% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, W.; Zhang, J.; Yao, J.; Tang, S.; Zhang, S. Performance Analysis and Optimization of Power Density Enhanced PMSM with Magnetic Stripe on Rotor. Energies 2020, 13, 4457. https://doi.org/10.3390/en13174457
Wei W, Zhang J, Yao J, Tang S, Zhang S. Performance Analysis and Optimization of Power Density Enhanced PMSM with Magnetic Stripe on Rotor. Energies. 2020; 13(17):4457. https://doi.org/10.3390/en13174457
Chicago/Turabian StyleWei, Wenlong, Jinping Zhang, Jin Yao, Siqi Tang, and Shiyou Zhang. 2020. "Performance Analysis and Optimization of Power Density Enhanced PMSM with Magnetic Stripe on Rotor" Energies 13, no. 17: 4457. https://doi.org/10.3390/en13174457
APA StyleWei, W., Zhang, J., Yao, J., Tang, S., & Zhang, S. (2020). Performance Analysis and Optimization of Power Density Enhanced PMSM with Magnetic Stripe on Rotor. Energies, 13(17), 4457. https://doi.org/10.3390/en13174457