Hydrokinetic Power Conversion Using Vortex-Induced Oscillation with Cubic Restoring Force

Abstract
1. Introduction
2. Test Apparatus
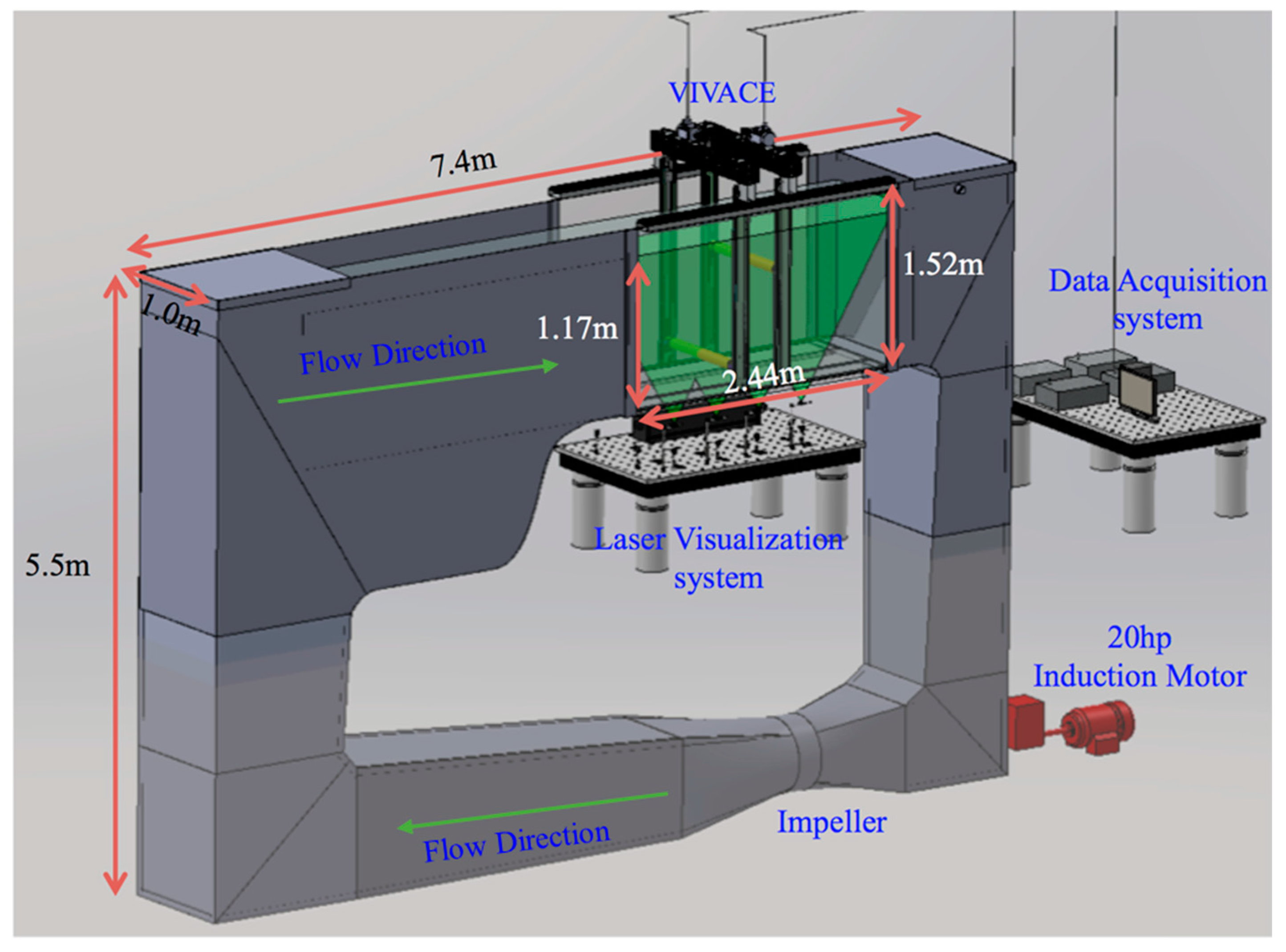
2.1. The Ltfsw Channel
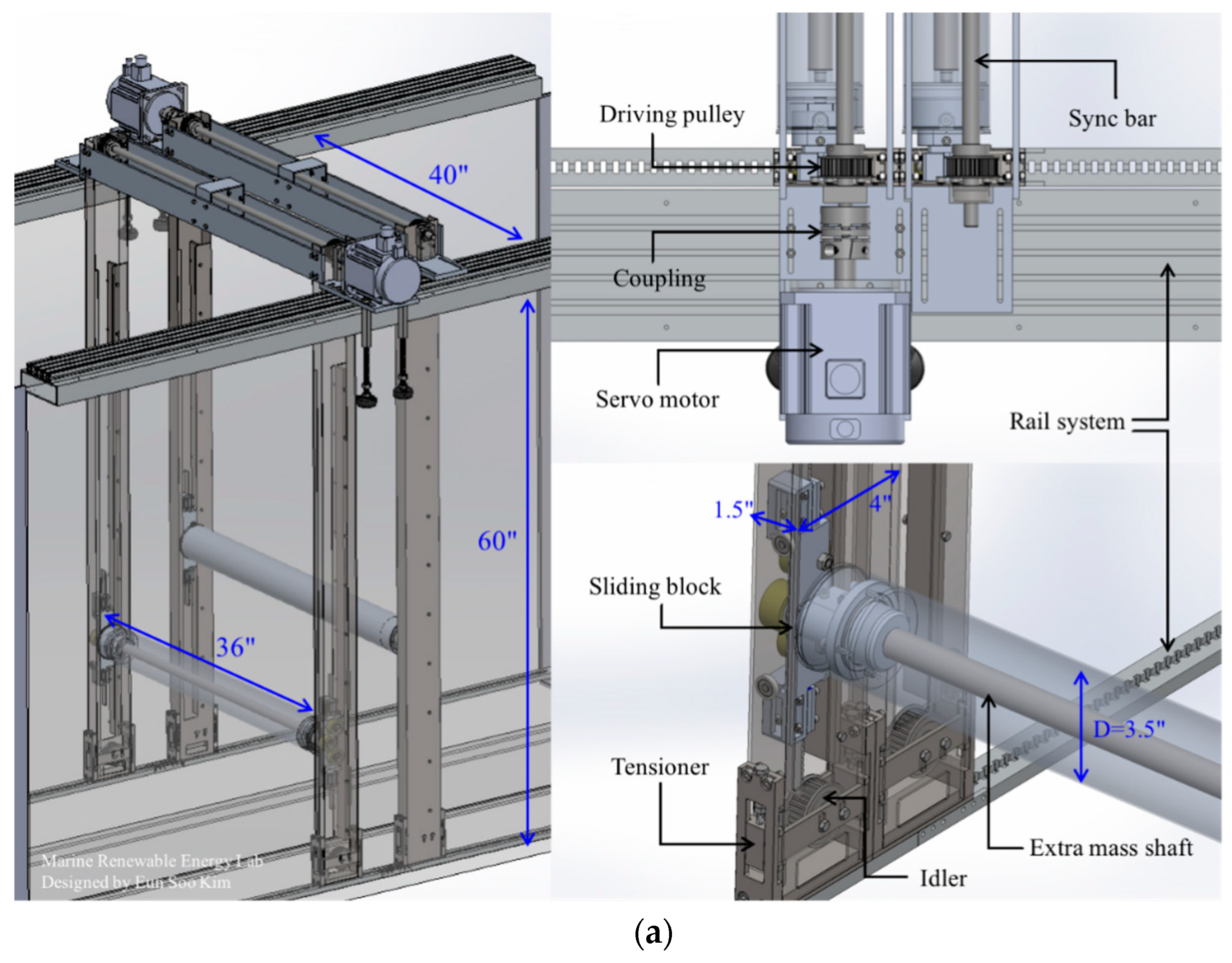
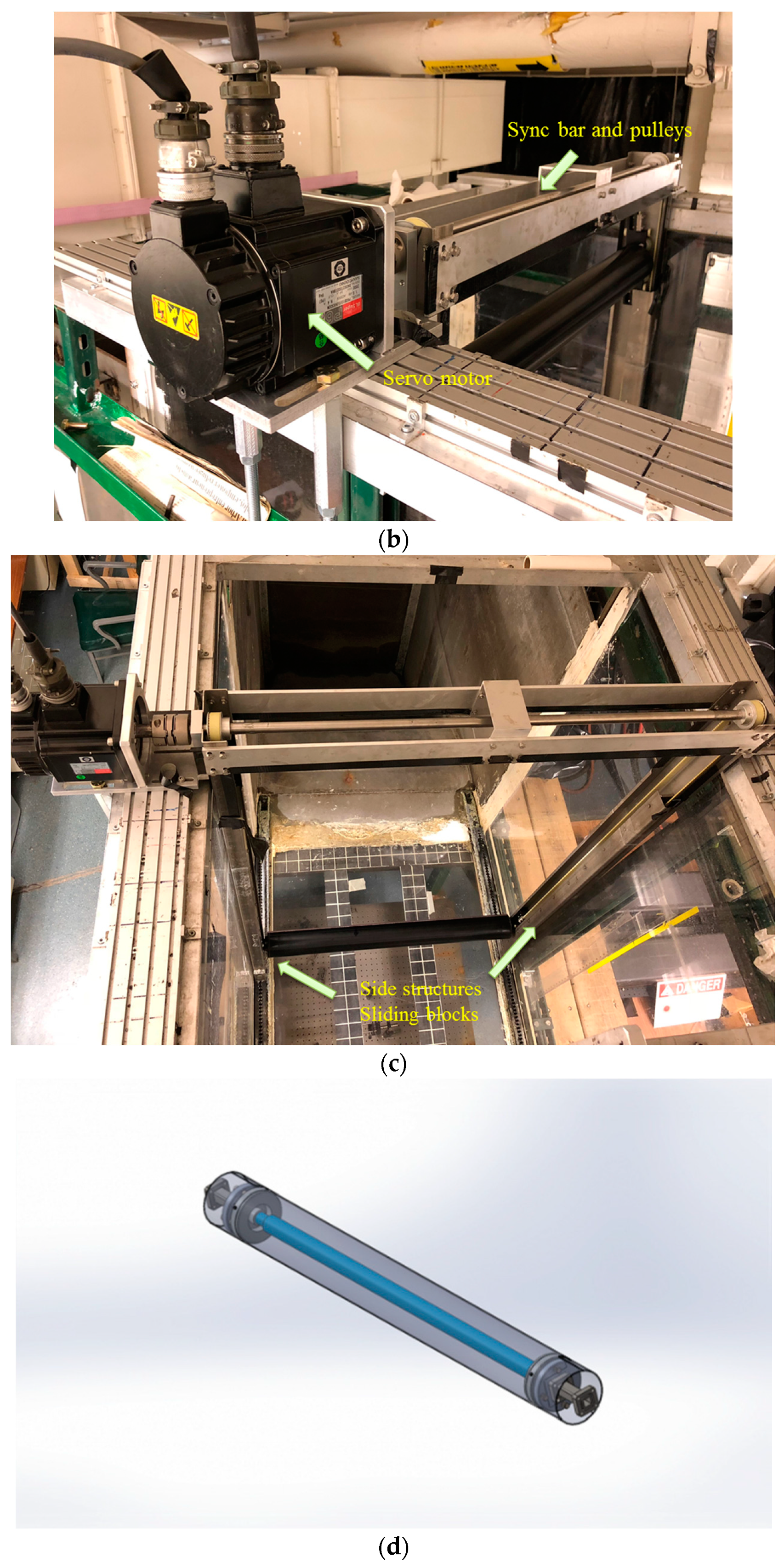
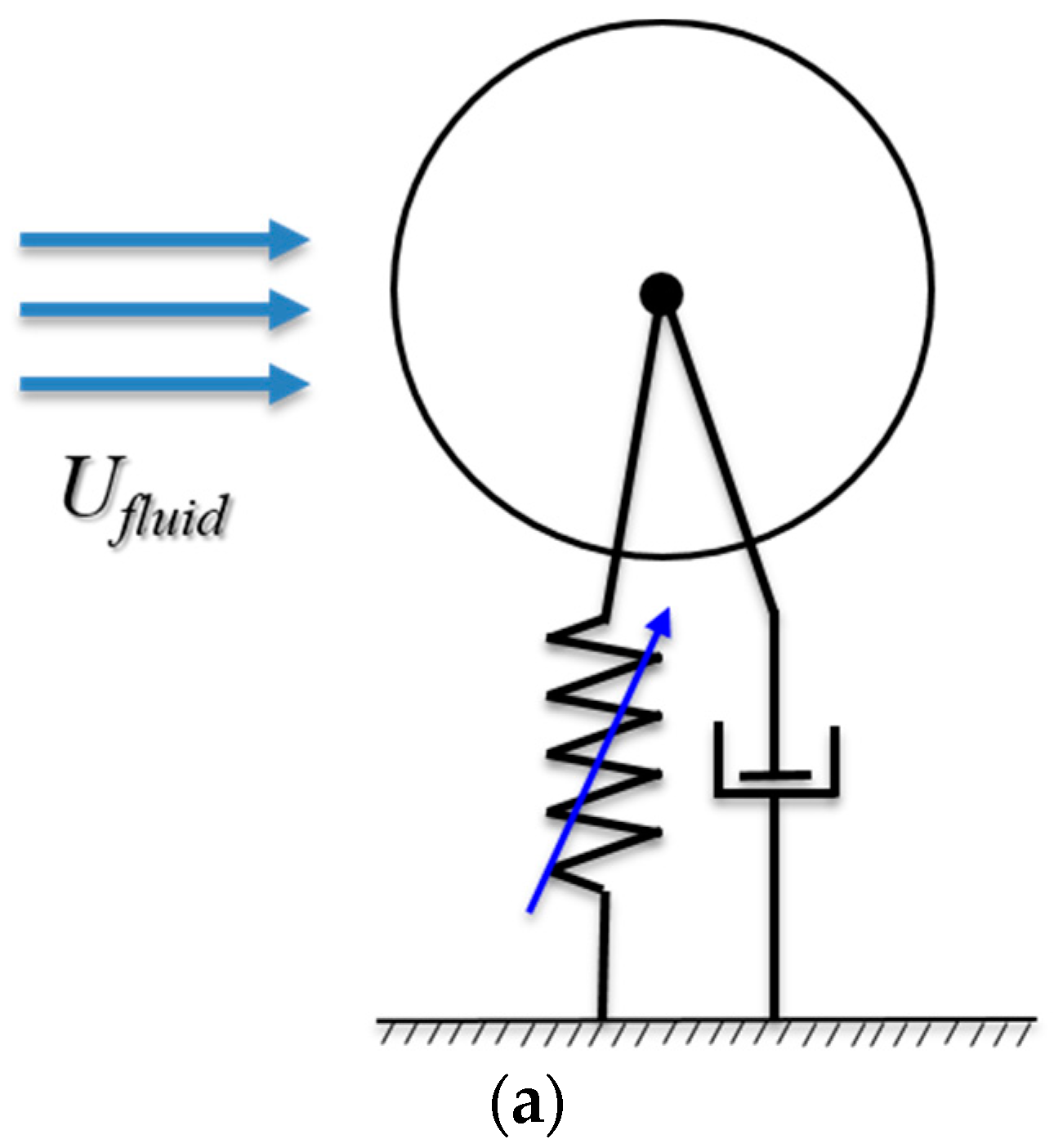
2.2. Oscillator Emulated by the Vck System
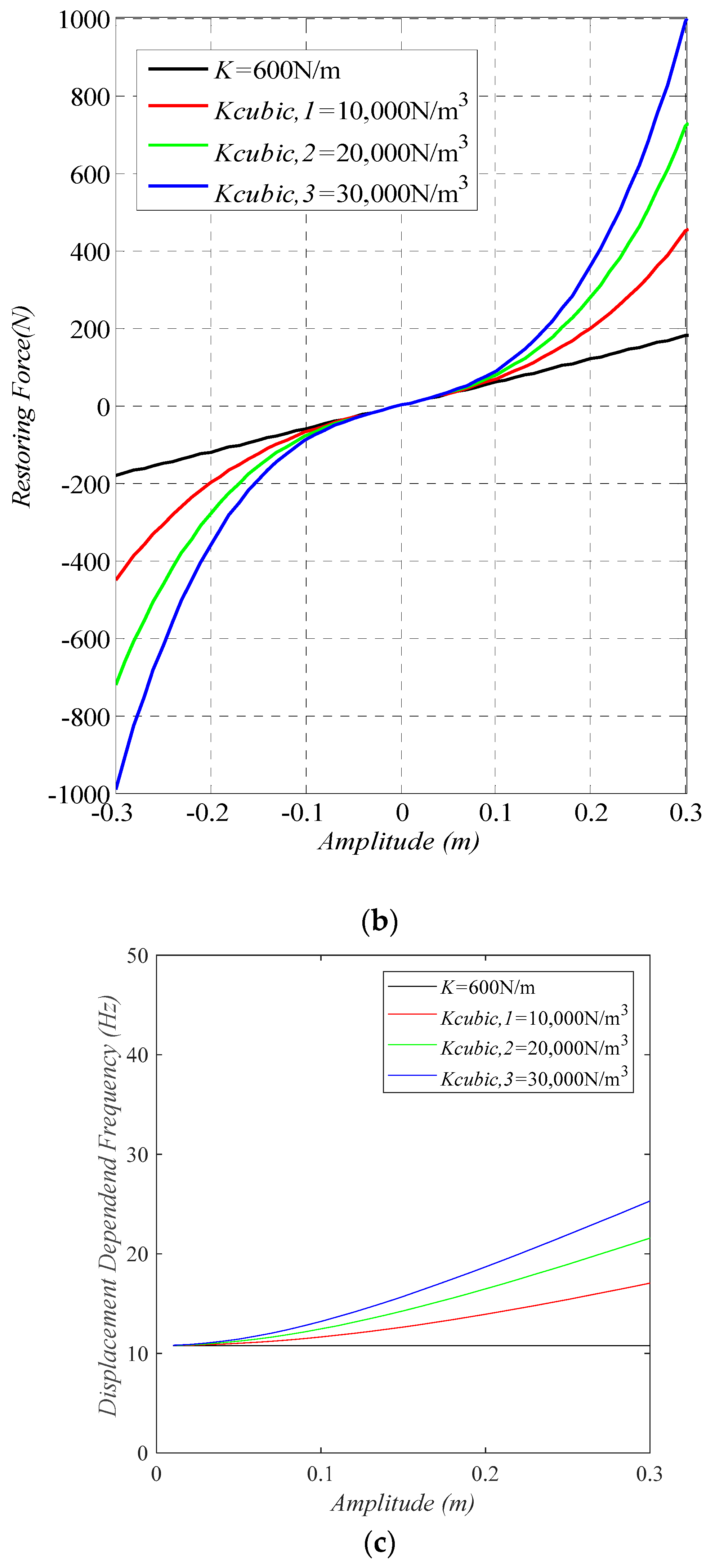
3. Nonlinear Cubic Stiffness Mathematical Model
4. The Mathematical Models of Harnessed Power and Efficiency in the Converter
4.1. Harnessed Power of Converter with Linear Spring Stiffness
4.2. Harnessed Power of the Nonlinear-Stiffness Restoring Force Oscillator
4.3. Harnessing Efficiency
5. Results and Discussion
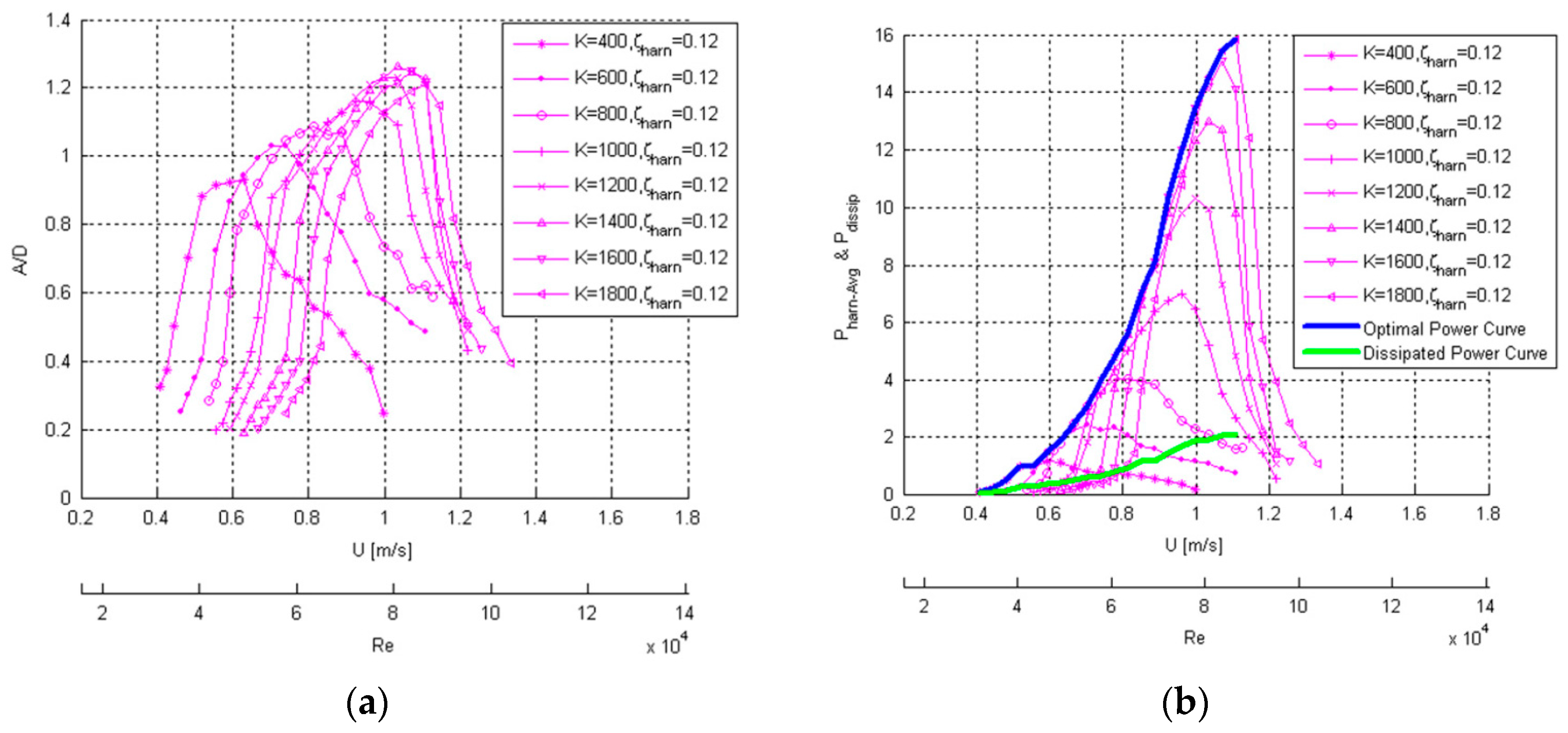
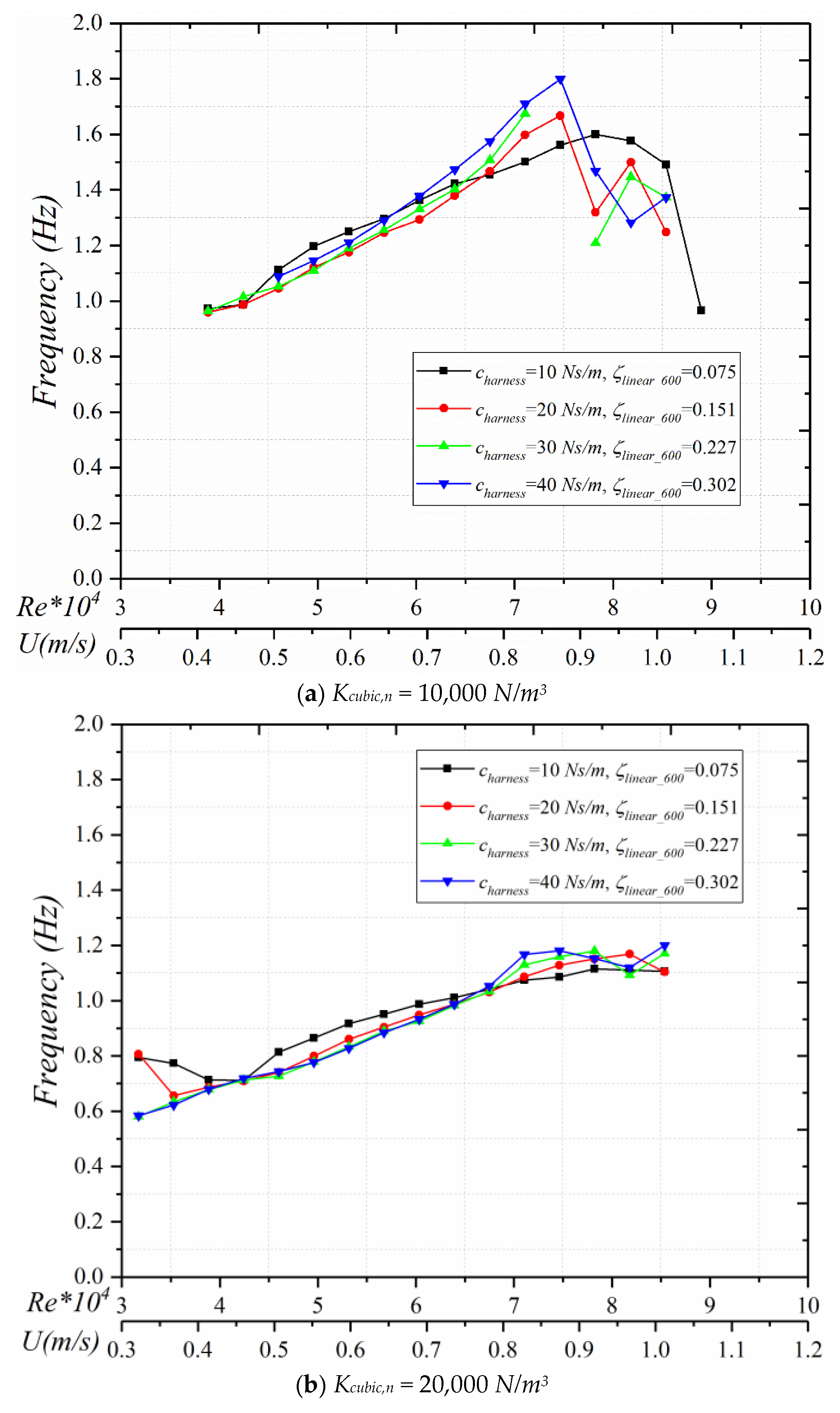
5.1. Amplitude Response
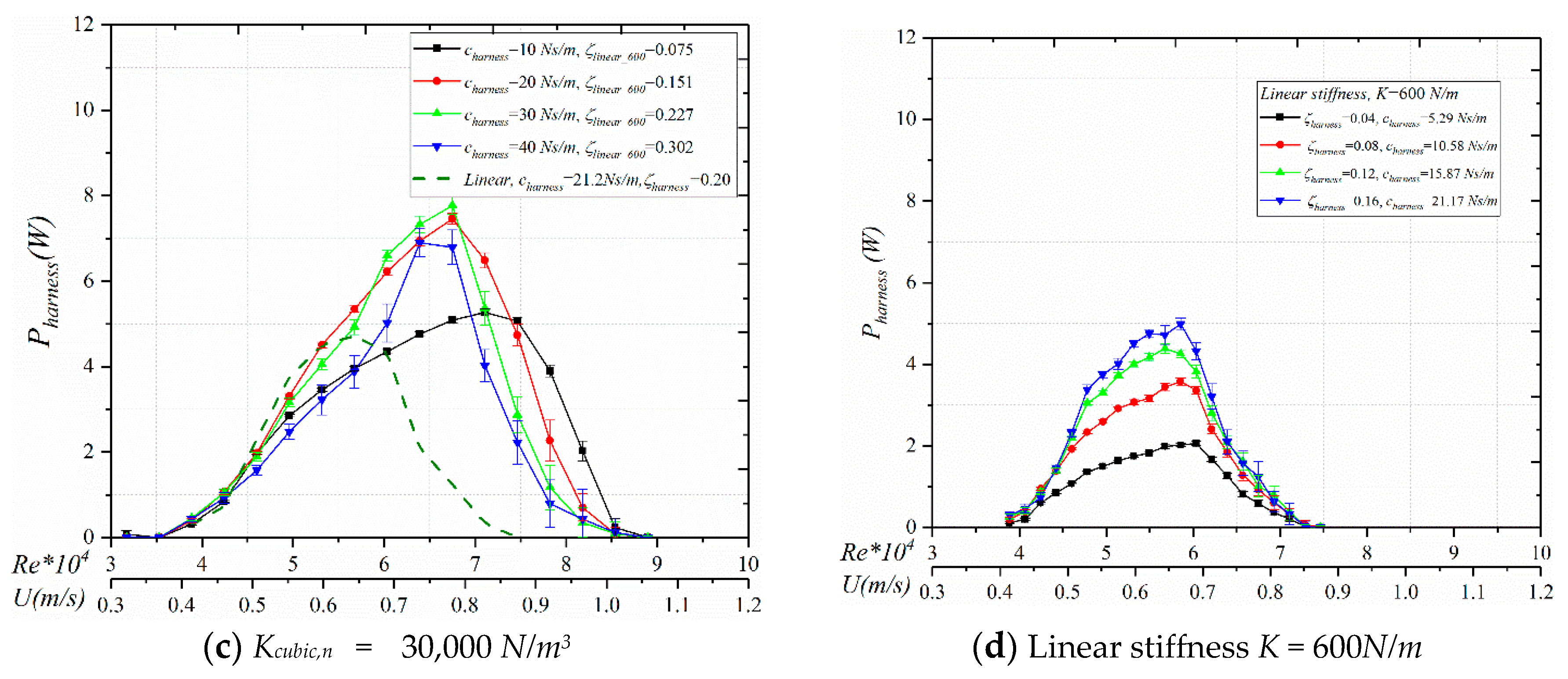
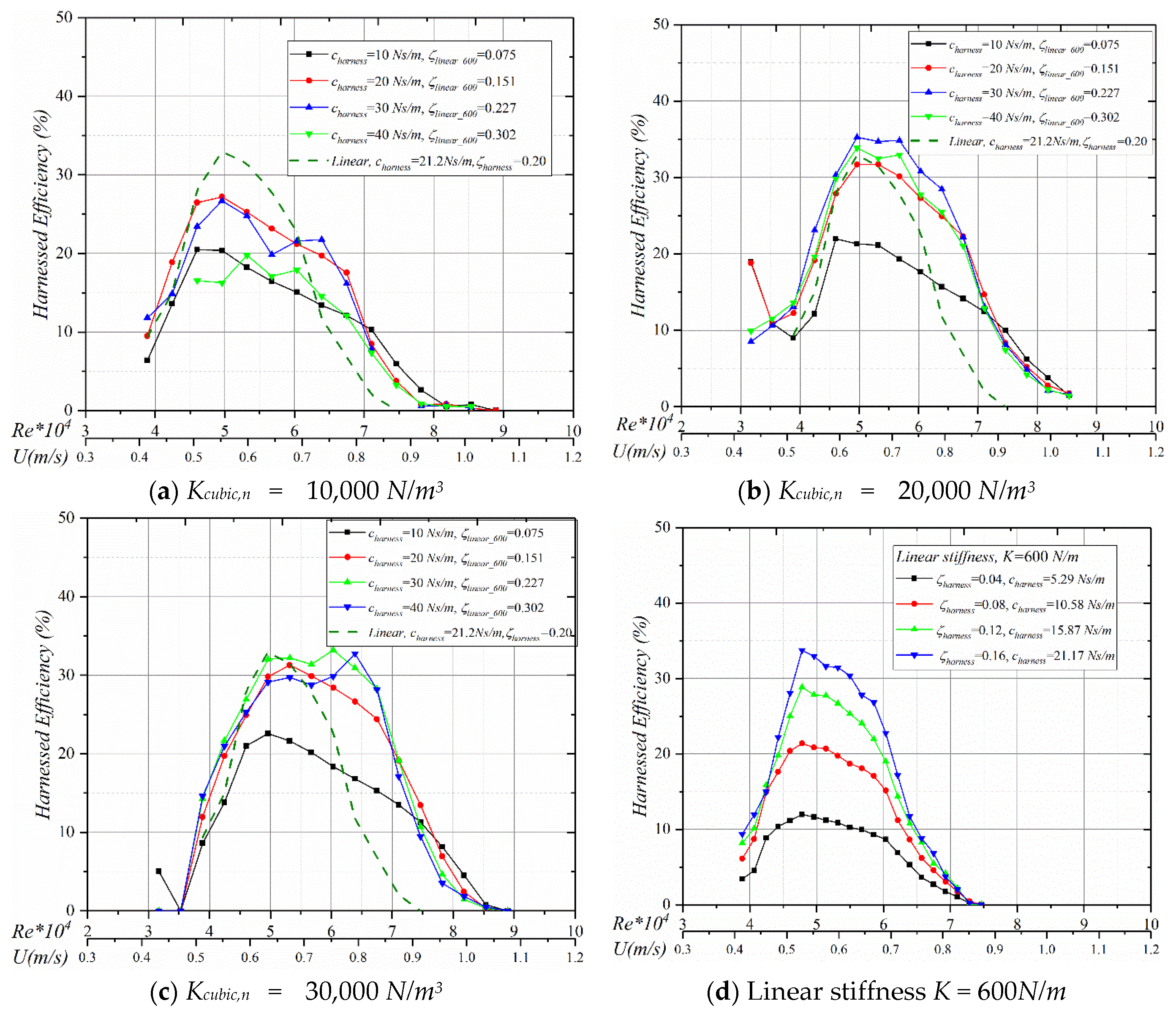
5.2. Harnessed Power and Harnessing Efficiency
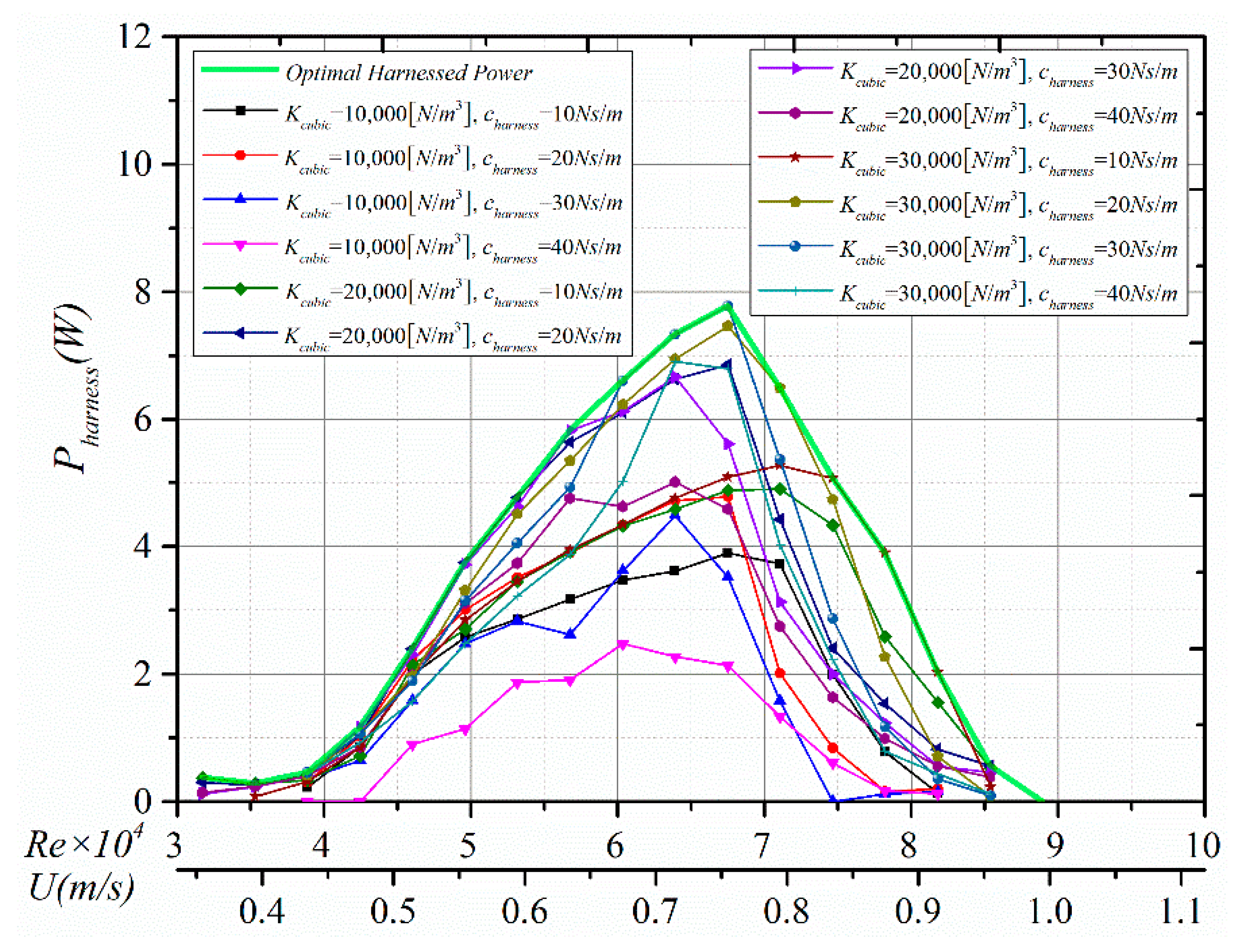
5.2.1. Harnessed Power
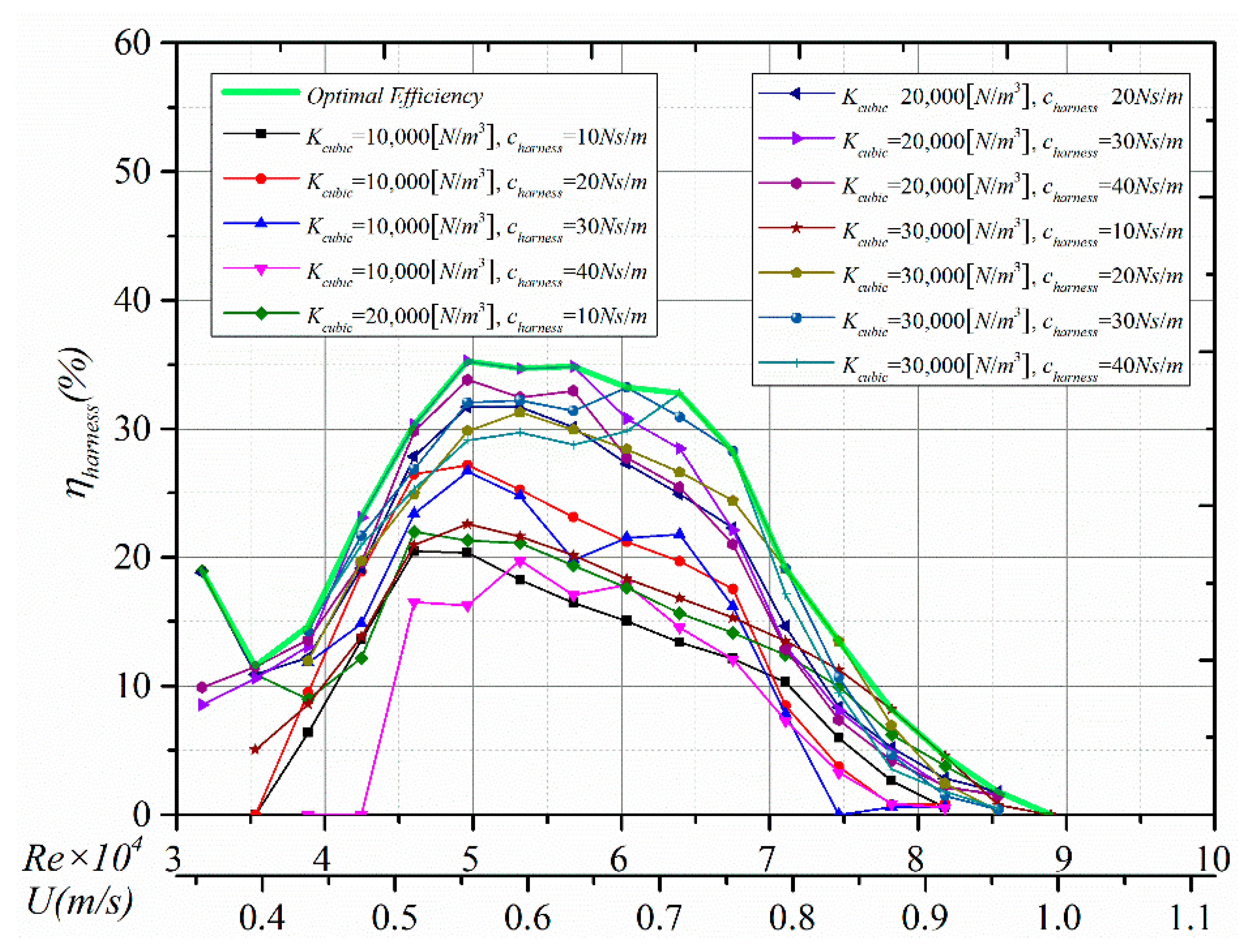
5.2.2. Harnessing Efficiency
5.3. Design Considerations for the Cubic Stiffness Converter
6. Conclusions and Remarks
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| A | Amplitude of transverse displacement |
| Charness | Harnessing damping |
| Cstructure | Frictional damping |
| ctotal | Total damping |
| D | Diameter of cylinder |
| fn | Natural frequency in vacuum |
| fn,water | Natural frequency in inviscid water |
| fosc | Oscillation frequency of cylinder |
| f | Frequency (Hz) |
| Ffluid | Force exerted by the fluid on the cylinder in the y-direction |
| k | Average grit height |
| K | Spring stiffness |
| Kcubic,n | Cubic spring stiffness |
| L | Cylinder length |
| mosc | Oscillating mass |
| ma | Added mass |
| md | Mass of fluid displaced by oscillating cylinder |
| m* | Mass ratio |
| Pdissipated | Dissipated power |
| Pfluid | Power in fluid flow |
| Pharness | Harnessed power |
| Re | Reynolds number |
| S | Surface through which fluid flows |
| U | Flow velocity |
| U* | Reduced velocity |
| Instantaneous cylinder motion in transvers direction | |
| Instantaneous cylinder velocity in transvers direction | |
| Instantaneous cylinder acceleration in transvers direction | |
| Greek Letters | |
| ζharness | Harnessing damping ratio |
| ζstructure | Frictional damping ratio |
| ζtotal | Total damping ratio |
| Efficiency in power conversion | |
| Efficiency in power harnessing | |
| Angular frequency of oscillation | |
Appendix A


References
- Bernitsas, M.M.; Ofuegbe, J.; Chen, J.U.; Sun, H. Eigen-Solution for Flow Induced Oscillations (VIV and Galloping) Revealed at the Fluid-Structure Interface. In Proceedings of the ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, UK, 9–14 June 2019. [Google Scholar]
- Sarpkaya, T. A critical review of the intrinsic nature of vortex-induced vibrations. J. Fluids Struct. 2004, 19, 389–447. [Google Scholar] [CrossRef]
- Bearman, P.W. Circular cylinder wakes and vortex-induced vibrations. J. Fluids Struct. 2011, 27, 648–658. [Google Scholar] [CrossRef]
- Mackowski, A.W.; Williamson, C.H. Developing a cyber-physical fluid dynamics facility for fluid–structure interaction studies. J. Fluids Struct. 2011, 27, 748–757. [Google Scholar] [CrossRef]
- Williamson, C.H.K.; Govardhan, R. Vortex-induced vibrations. Annu. Rev. Fluid Mech. 2004, 36, 413–455. [Google Scholar] [CrossRef]
- Vikestad, K.; Vandiver, J.K.; Larsen, C.M. Added mass and oscillation frequency for a circular cylinder subjected to vortex-induced vibrations and external disturbance. J. Fluids Struct. 2000, 14, 1071–1088. [Google Scholar] [CrossRef]
- Lee, J.H.; Xiros, N.; Bernitsas, M.M. Virtual damper–spring system for VIV experiments and hydrokinetic energy conversion. Ocean Eng. 2011, 38, 732–747. [Google Scholar] [CrossRef]
- Bernitsas, M.M.; Raghavan, K.; Ben-Simon, Y.; Garcia, E.M.H. VIVACE (Vortex Induced Vibration Aquatic Clean Energy): A new concept in generation of clean and renewable energy from fluid flow. J. Offshore Mech. Arct. Eng. Trans. ASME 2008, 130, 041101. [Google Scholar] [CrossRef]
- Sun, H.; Kim, E.S.; Nowakowski, G.; Mauer, E.; Bernitsas, M.M. Effect of mass-ratio, damping, and stiffness on optimal hydrokinetic energy conversion of a single, rough cylinder in flow induced motions. Renew. Energy 2016, 99, 936–959. [Google Scholar] [CrossRef]
- Ma, C.; Sun, H.; Nowakowski, G.; Mauer, E.; Bernitsas, M.M. Nonlinear piecewise restoring force in hydrokinetic power conversion using flow induced motions of single cylinder. Ocean Eng. 2016, 128, 1–12. [Google Scholar] [CrossRef]
- Barton, D.A.; Burrow, S.G.; Clare, L.R. Energy harvesting from vibrations with a nonlinear oscillator. J. Vib. Acoust. 2010, 132, 021009. [Google Scholar] [CrossRef]
- Ma, C.; Sun, H.; Bernitsas, M.M. Nonlinear Piecewise Restoring Force in Hydrokinetic Power Conversion Using Flow-Induced Vibrations of Two Tandem Cylinders. J. Offshore Mech. Arct. Eng. 2018, 140. [Google Scholar] [CrossRef]
- Sun, H.; Bernitsas, M.M. Bio-Inspired adaptive damping in hydrokinetic energy harnessing using flow-induced oscillations. Energy 2019, 176, 940–960. [Google Scholar] [CrossRef]
- Cottone, F.; Vocca, H.; Gammaitoni, L. Nonlinear energy harvesting. Phys. Rev. Lett. 2009, 102, 080601. [Google Scholar] [CrossRef] [PubMed]
- Ferrari, M.; Ferrari, V.; Guizzetti, M.; Andò, B.; Baglio, S.; Trigona, C. Improved energy harvesting from wideband vibrations by nonlinear piezoelectric converters. Sens. Actuators A Phys. 2010, 162, 425–431. [Google Scholar] [CrossRef]
- Abdelkefi, A.; Hajj, M.R.; Nayfeh, A.H. Phenomena and modeling of piezoelectric energy harvesting from freely oscillating cylinders. Nonlinear Dyn. 2012, 70, 1377–1388. [Google Scholar] [CrossRef]
- Huynh, B.H.; Tjahjowidodo, T.; Zhong, Z.W.; Wang, Y.; Srikanth, N. Numerical and experimental investigation of nonlinear vortex induced vibration energy converters. J. Mech. Sci. Technol. 2017, 31, 3715–3726. [Google Scholar] [CrossRef]
- Sun, H.; Kim, E.S.; Bernitsas, P.M.; Bernitsas, M.M. Virtual Spring–Damping System for Flow-Induced Motion Experiments. J. Offshore Mech. Arct. Eng. 2015, 137, 061801. [Google Scholar] [CrossRef]
- Kinaci, O.K.; Lakka, S.; Sun, H.; Bernitsas, M.M. Effect Of Tip-Flow On Vortex Induced Vibration Of Circular Cylinders For . Ocean Eng. 2016, 117, 130–142. [Google Scholar] [CrossRef]
- Lee, J.H.; Bernitsas, M.M. High-damping, High-Reynolds VIV tests for energy harnessing using the VIVACE converter. Ocean Eng. 2011, 38, 1697–1712. [Google Scholar] [CrossRef]
- Bernitsas, M.M. Harvesting Energy by Flow Included Motions; Chapter 47; Springer Handbook of Ocean Engineering; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Foulhoux, L.; Bernitsas, M.M. Forces and Moments on a Small Body Moving in a 3-D Unsteady Flow. J. Offshore Mech. Arct. Eng. ASME Trans. 1993, 115, 91–104. [Google Scholar] [CrossRef]
- Betz, A. Das Maximum der theoretisch möglichen Ausnützung des Windes durch Windmotoren. Z. Gesamte Turbinenwesen 1920, 26, 307–309. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass Ratio | Aspect Ratio | Maximum Oscillatory Amplitude | Longitudinal Distance |
|---|---|---|---|
| 0.91 ≤ m* ≤ 1.98 | L/D = 10.29 | Amax/D3.5” = 5.0 | 1.429 ≤ d/D3.5” ≤ 6.0 |
| Test Parameters | |
|---|---|
| K [N/m] (Based stiffness) | 600 |
| fn [Hz] (K = 600 N/m) | 1.44 |
| fn,water [Hz] (K = 600 N/m) | 1.09 (quiescent water) |
| Kcubic,n [N/m3] | 10,000; 20,000; 30,000 |
| charness [Ns/m] | 10, 20, 30, 40 |
| cstructure [Ns/m] | 3.41 |
| D [m] | 0.0889 |
| L [m] | 0.895 |
| md = ρπD2/4 [kg] | 5.425 |
| mosc [kg] | 7.286 |
| ma [kg] (inviscid) | 5.425 |
| Temperature [°C] | 18.5~20.5 |
| μ [N s/m2] | 1.004 × 103 |
| υ [m2/s] | 9.940 × 107 |
| ρ [kg/m3] | 999.729 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Bernitsas, C.; Jing, G.; Hai, S. Hydrokinetic Power Conversion Using Vortex-Induced Oscillation with Cubic Restoring Force. Energies 2020, 13, 3283. https://doi.org/10.3390/en13123283
Li M, Bernitsas C, Jing G, Hai S. Hydrokinetic Power Conversion Using Vortex-Induced Oscillation with Cubic Restoring Force. Energies. 2020; 13(12):3283. https://doi.org/10.3390/en13123283
Chicago/Turabian StyleLi, Mengyu, Christopher Bernitsas, Guo Jing, and Sun Hai. 2020. "Hydrokinetic Power Conversion Using Vortex-Induced Oscillation with Cubic Restoring Force" Energies 13, no. 12: 3283. https://doi.org/10.3390/en13123283
APA StyleLi, M., Bernitsas, C., Jing, G., & Hai, S. (2020). Hydrokinetic Power Conversion Using Vortex-Induced Oscillation with Cubic Restoring Force. Energies, 13(12), 3283. https://doi.org/10.3390/en13123283