Computer Simulation as a Tool for Managing the Technical Development of Methods for Diagnosing the Technical Condition of a Vehicle




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
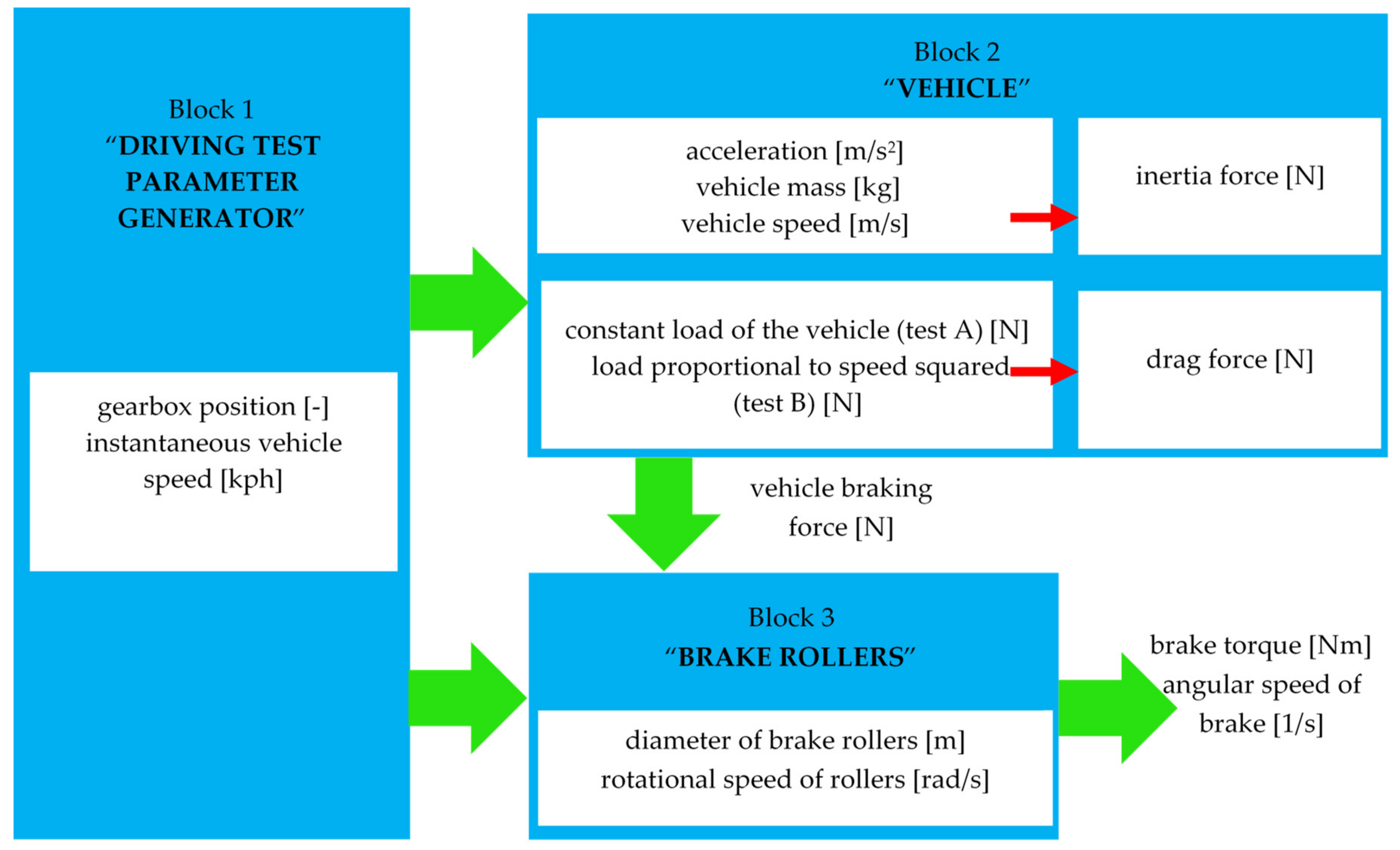
2.1. Determination of Dynamometer Requirements Based on Simulation of Driving Tests in SciLab
- CADCM150—Common Artemis Driving Cycle—Motor Medium with vMax = 150 kph
- CADC150—Common Artemis Driving Cycle—Motor Highway with vMax = 150 kph
- FTP75—EPA Federal Test Procedure—75 [0 … 1874] s at vMax = 56.7 mph = 91.25 kph
- NEDC—New European Drive Cycle [0 … 1180] s = 4 × UDC + 1 × EUDC
- WLTP—Worldwide Harmonized Light Vehicle Test Procedure—class 3 [0 … 1800] s at vMax = 131.3 kph.
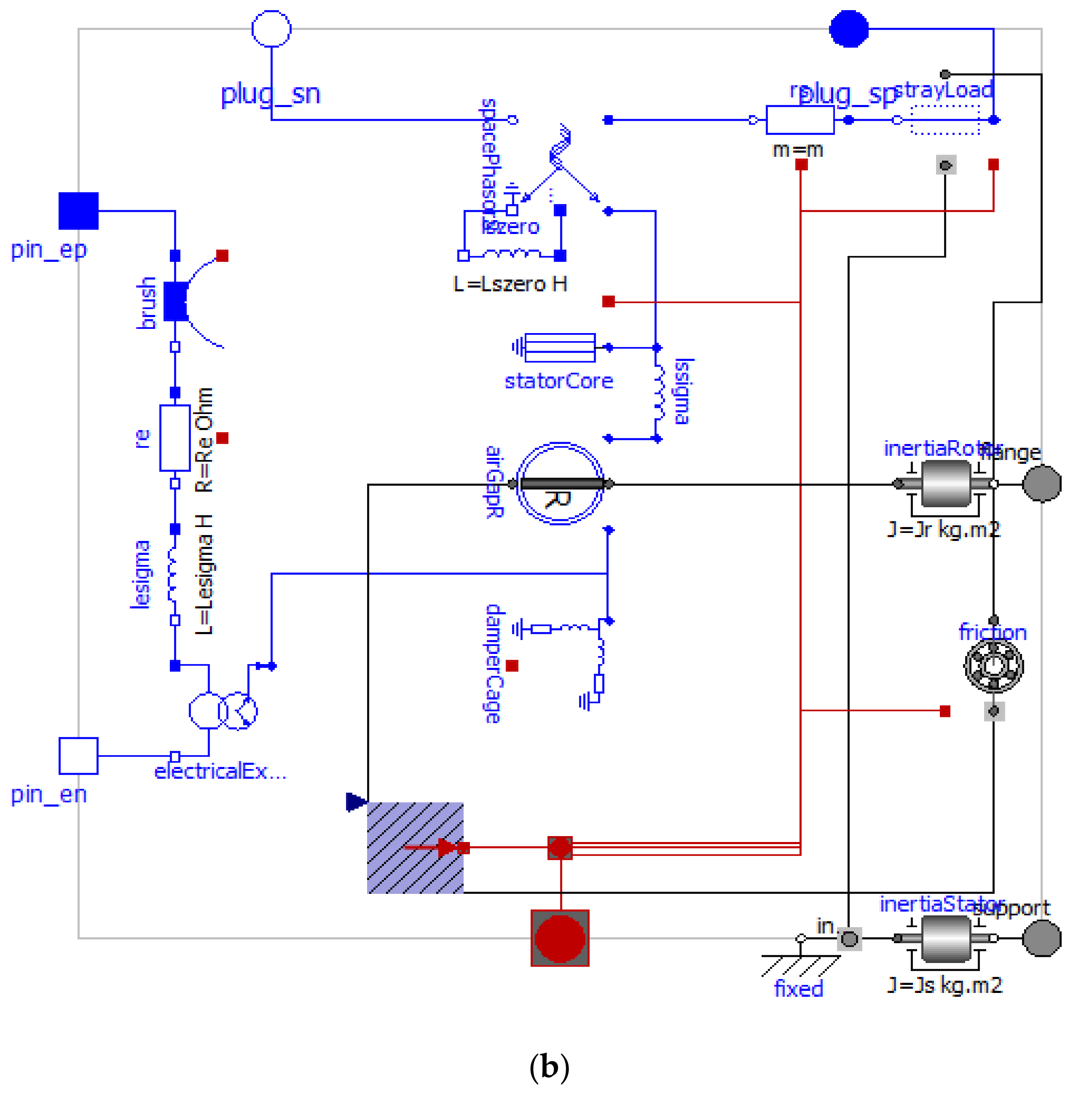
2.2. Simulation of the Braking Process for the Generator in the OpenModelica Program, in the Context of Driving Tests
3. Results
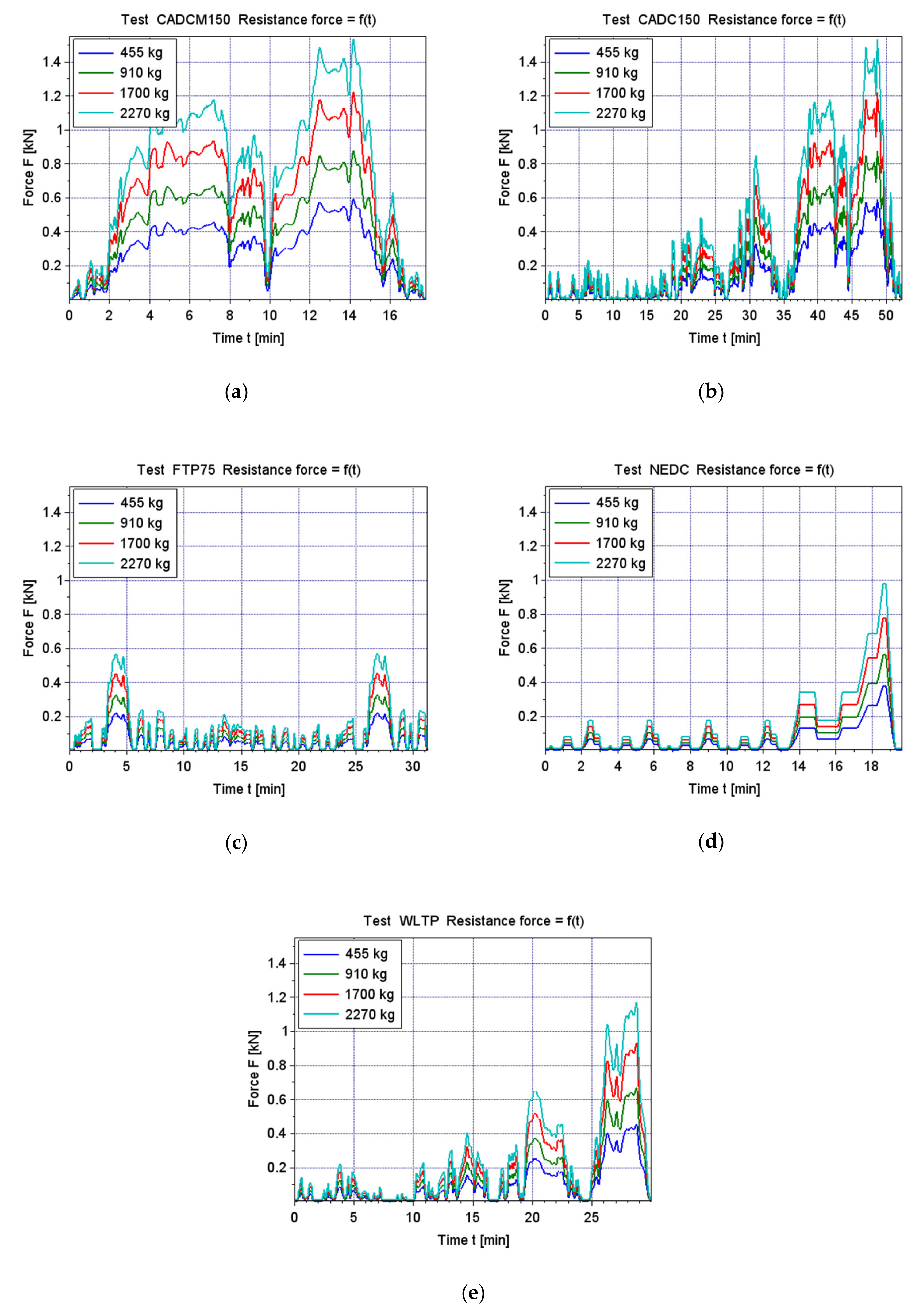
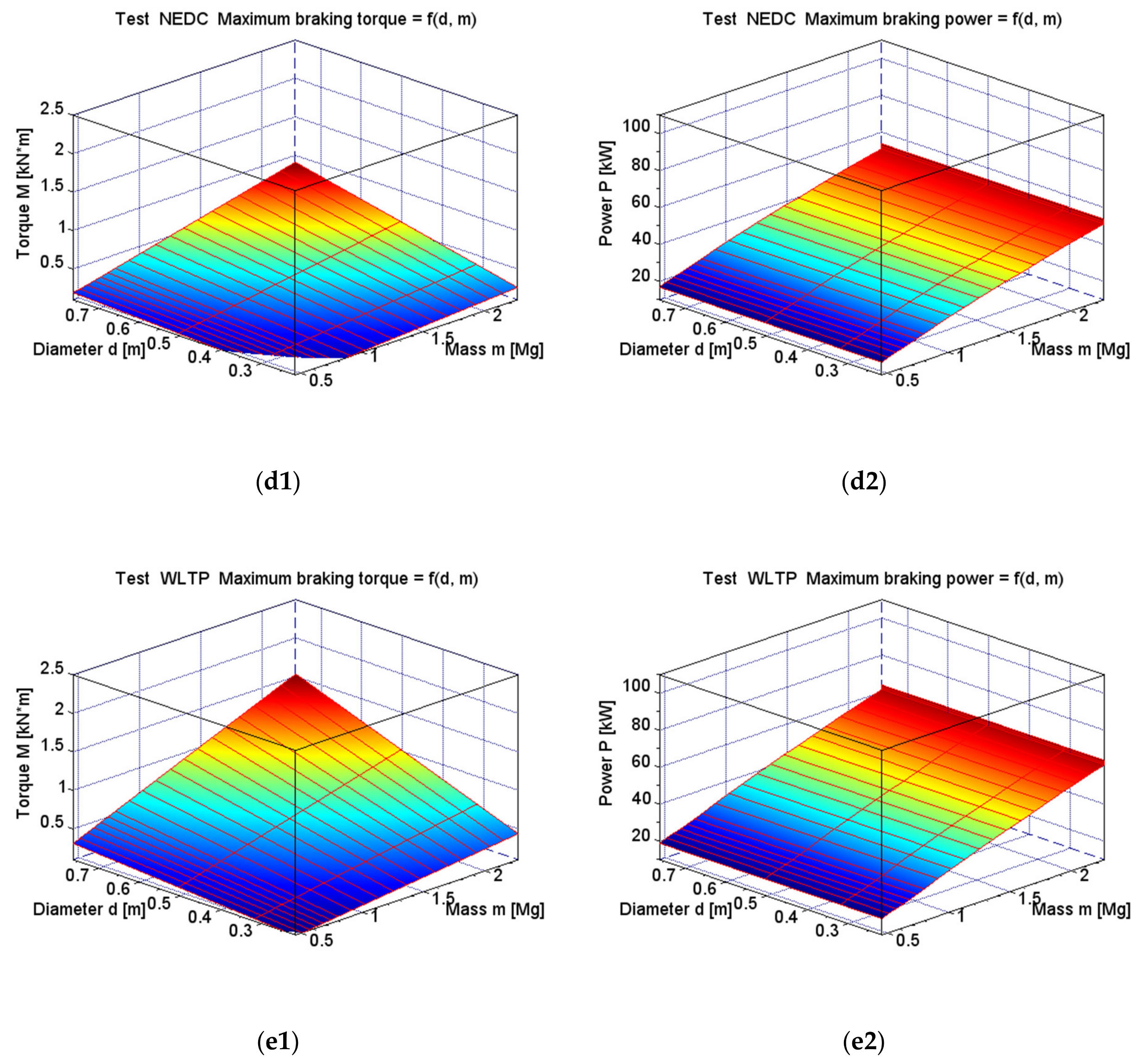
3.1. SciLab Simulation Results of Driving Tests for Various Braking Elements and Roller Sizes
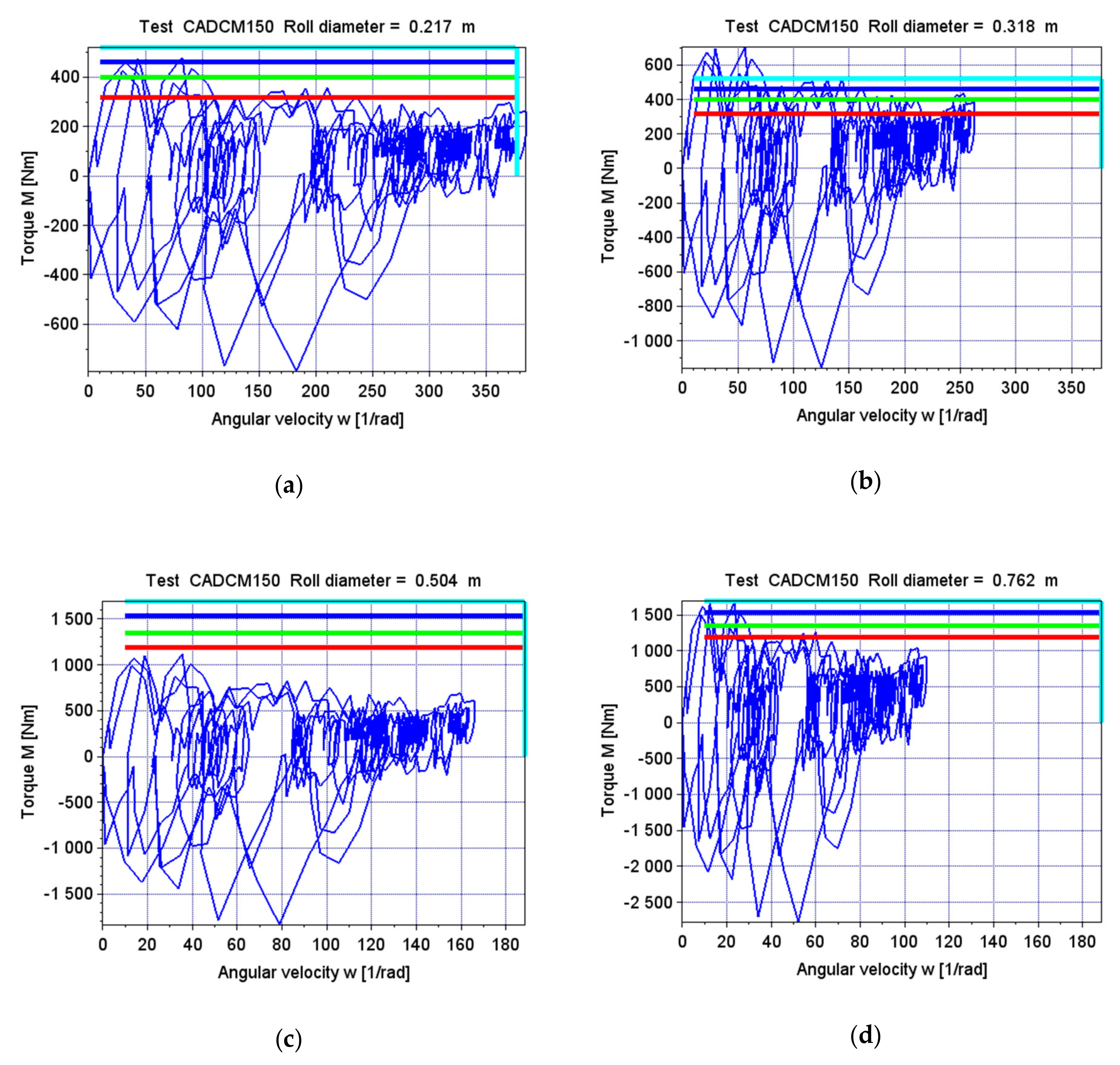
3.1.1. CADCM150 Driving Test
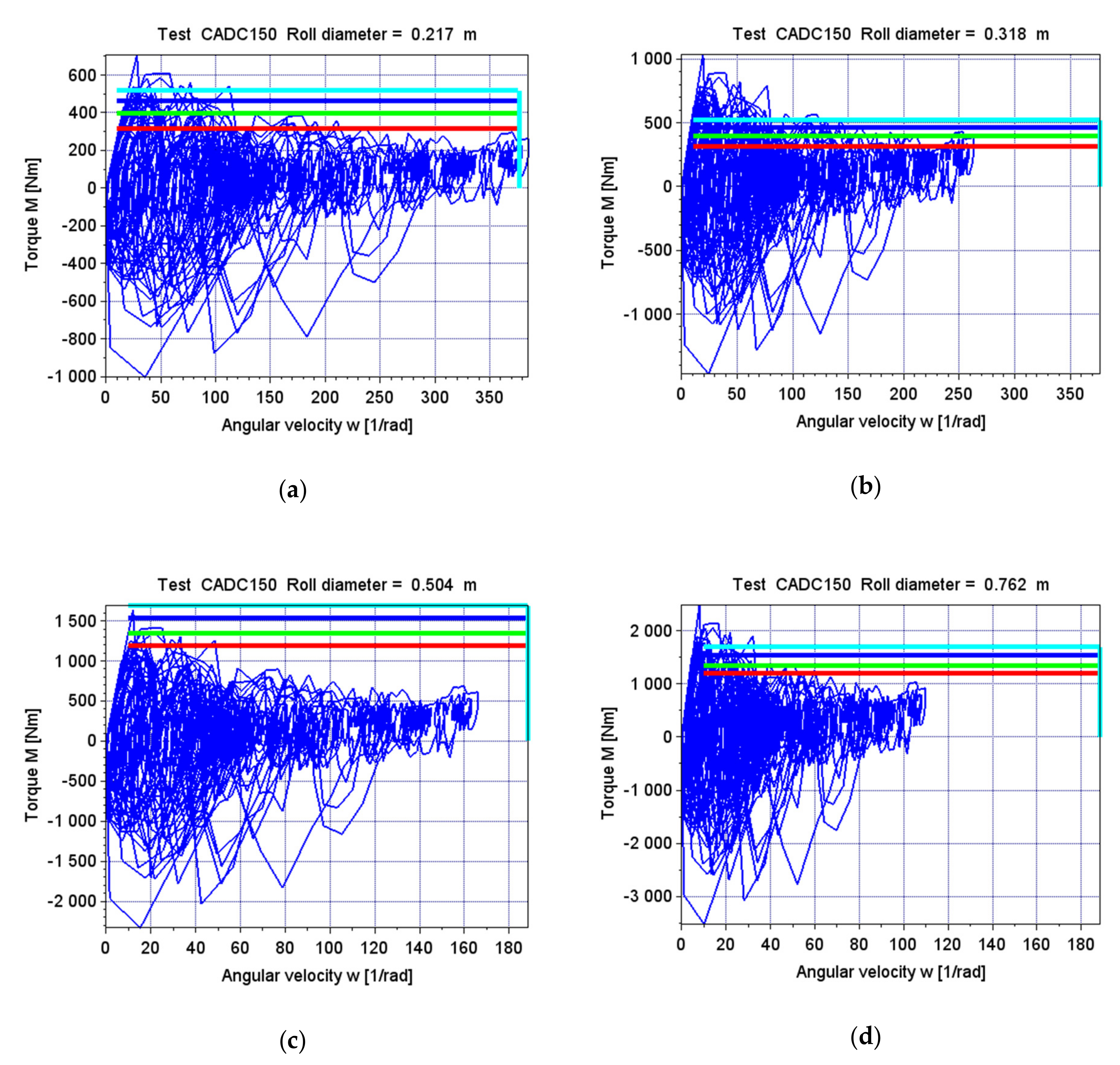
3.1.2. CADC150 Driving Test
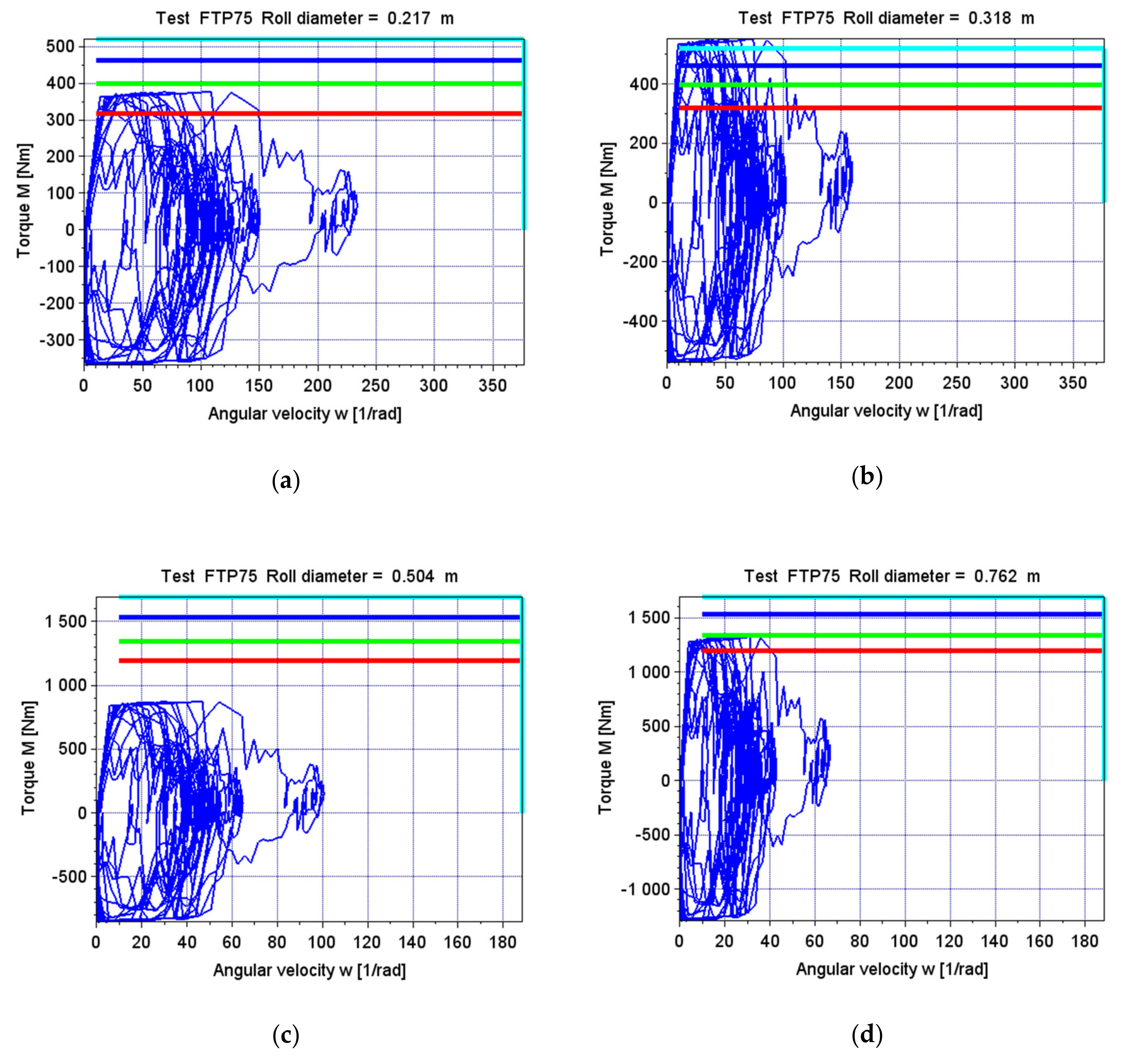
3.1.3. FTP75 Driving Test
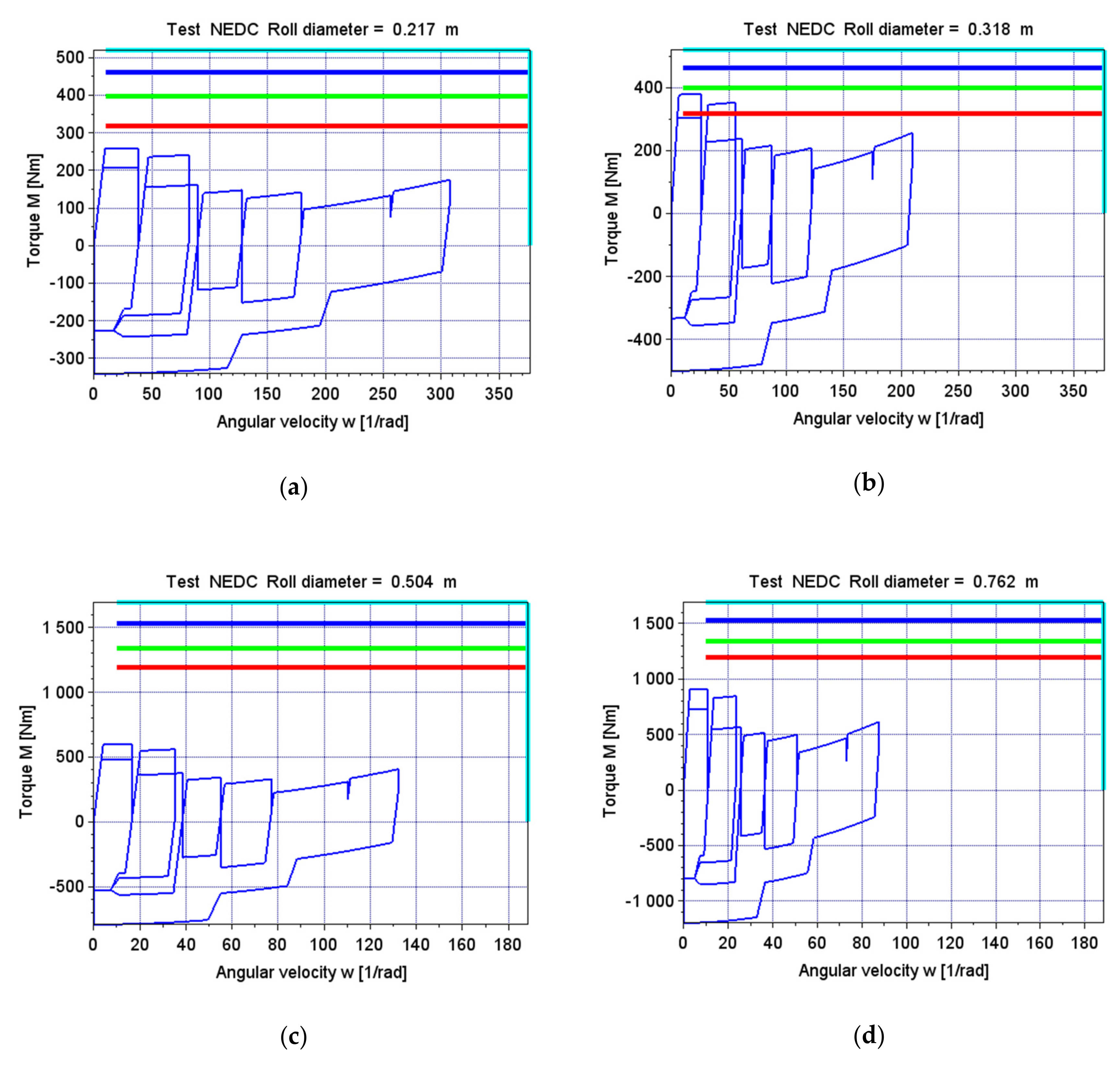
3.1.4. NEDC Driving Test
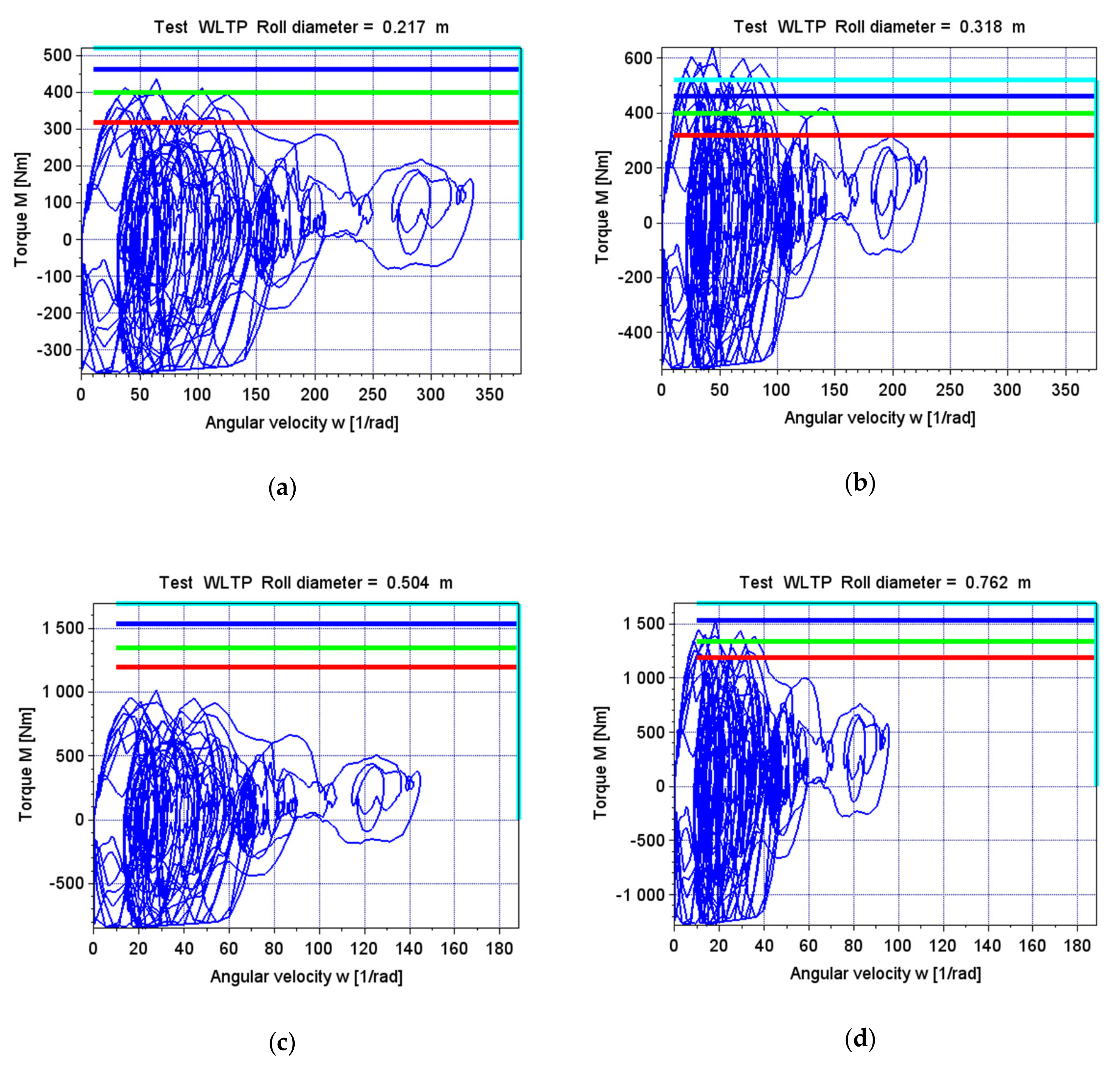
3.1.5. WLTP Driving Test
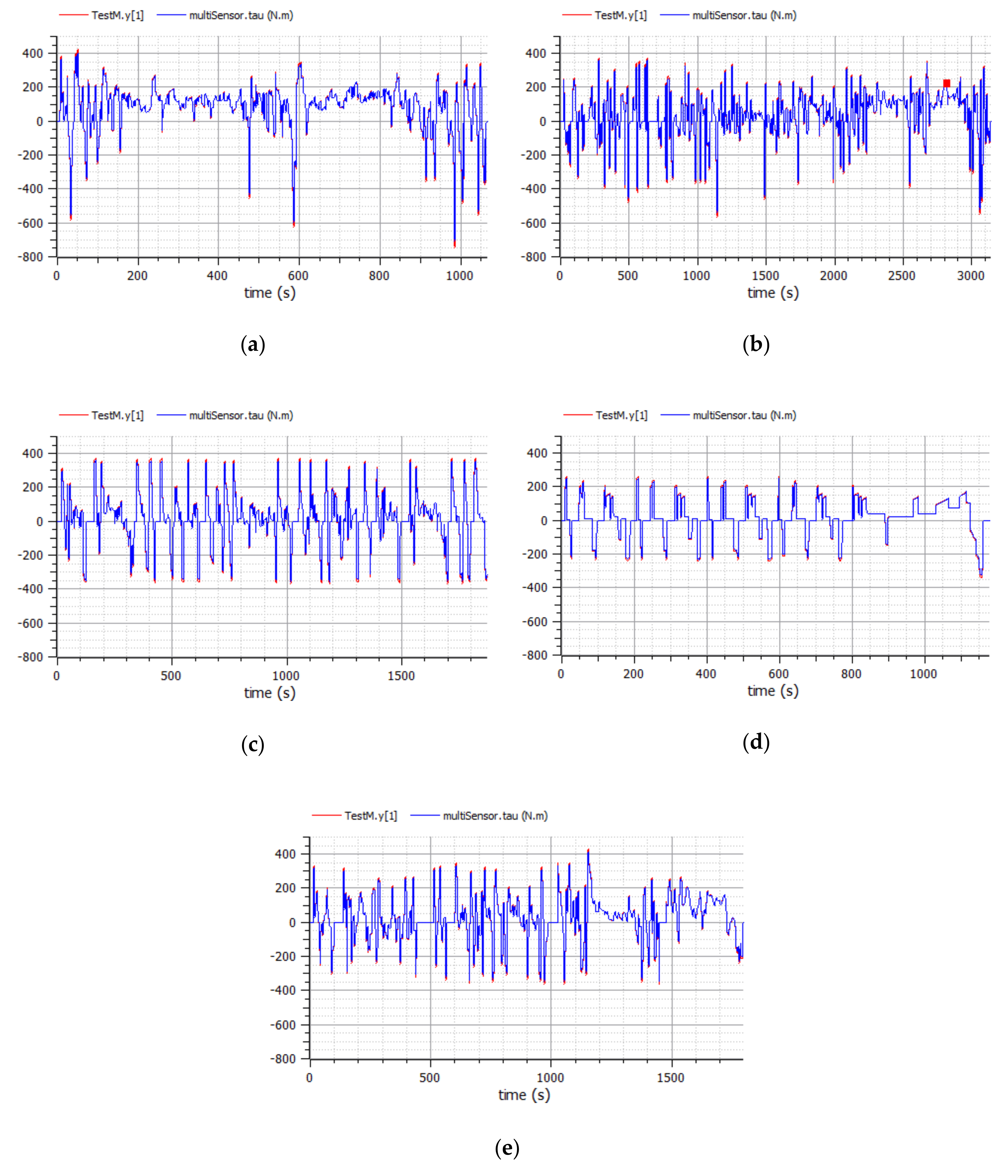
3.2. OpenModelica Simulation Results of the Braking Process for the Generator for Driving Tests
4. Conclusions
- Driving tests became the basis for building simulation models. However, to check the simulation position for the most common driving tests carried out worldwide (NEDC and WLTP), the following simulation input data were added to the set of simulation input data: CADCM150, CADC150, FTP75, which were characterized by the use of high speed of the vehicle movement during testing, which resulted in high demand of mechanical energy reception by the chassis dynamometer brake.
- In order to determine the minimum required parameters of the element receiving energy from the vehicle in the aforementioned tests, a simulation was developed using the SciLab package. Based on the results obtained from the simulation processes, including the change in the driving test mode of the vehicle mass and the adopted diameter of the brake rollers, the minimum brake power value of 200 kVA at the rated speed of 3600 rpm was selected.
- In the OpenModelica program, simulations of the component receiving mechanical power during the test were developed for: A generator with the option of controlling the excitation current. Based on the obtained results of the component, it can be concluded that the generators, due to the possibility of their work as an engine or generator, are better suited to a chassis dynamometer with dynamic tests of light vehicles up to 3.5 tons.
- The analysis of the simulation results, including simulated driving tests, variable diameter of brake rollers and types of synchronous generators allowed to choose a generator that meets the requirements and is available on the market. Consequently, the simulation is the basis for further implementation work.
- The special advantage of this type of electrical machine is the possibility of transferring the received energy during the driving test to the power grid, which reduces the amount of heat generated into the environment and irreversible energy losses.
- The developed simulation constitutes a useful tool for initial research or planning of real experiments. It may be an element of a more comprehensive system or an independent system.
- The authors in future research, presented in the manuscript of the tool, will expand on the results of experimental tests carried out on combustion engines powered by selected fuels and on simulations of work of other system components.
5. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Capros, C.; Kannavou, M.; Evangelopoulou, S.; Petropoulos, A.; Siskos, P.; Tasios, N.; Zazias, G.; DeVita, A. Outlook of the EU energy system up to 2050: The case of scenarios prepared for European Commission’s “clean energy for all Europeans” package using the PRIMES model. Energy Strategy Rev. 2018, 22, 255–263. [Google Scholar] [CrossRef]
- Piwowar, A.; Dzikuć, M. Development of Renewable Energy Sources in the Context of Threats Resulting from Low-Altitude Emissions in Rural Areas in Poland: A Review. Energies 2019, 12, 3558. [Google Scholar] [CrossRef]
- Ng, C.W.; Tam, I.C.K.; Wu, D. System Modelling of Organic Rankine Cycle for Waste Energy Recovery System in Marine Applications. Energy Procedia 2019, 158, 1955–1961. [Google Scholar] [CrossRef]
- Aneke, M.; Agnew, B.; Underwood, C.; Wu, H.W.; Masheiti, S. Power generation from waste heat in a food processing application. Appl. Therm. Eng. 2012, 36, 171–180. [Google Scholar] [CrossRef]
- Production of Passenger Cars Worldwide from 1998 to 2018. Available online: https://www.statista.com/statistics/268739/production-of-passenger-cars-worldwide/ (accessed on 21 April 2020).
- Pettersson, P.; Johannesson, P.; Jacobson, B.; Bruzelius, F.; Fast, L.; Berglund, S. A statistical operating cycle description for prediction of road vehicles’ energy consumption. Transp. Res. Part D Transp. Environ. 2019, 73, 205–229. [Google Scholar] [CrossRef]
- Passenger Cars in the EU. Available online: https://ec.europa.eu/eurostat/ (accessed on 21 April 2020).
- Palkowski, K. Electric Car and Atmosphere Protection. Rocz. Ochr. Srodowiska Annu. Set Environ. Prot. 2016, 18, 628–639. [Google Scholar]
- Helmers, E.; Leitão, J.; Tietge, U.; Butler, T. CO2-equivalent emissions from European passenger vehicles in the years 1995–2015 based on real-world use: Assessing the climate benefit of the European “diesel boom”. Atmos. Environ. 2019, 198, 122–132. [Google Scholar] [CrossRef]
- Biernat, K. Perspectives for global development of biofuel technologies to 2050. Chemik 2012, 66, 1178–1189. [Google Scholar]
- Tucki, K.; Orynycz, O.; Świć, A.; Mitoraj-Wojtanek, M. The Development of Electromobility in Poland and EU States as a Tool for Management of CO2 Emissions. Energies 2019, 12, 2942. [Google Scholar] [CrossRef]
- Chłopek, Z.; Biedrzycki, J.; Lasocki, J.; Wójcik, P. Pollutant emissions from combustion engine of motor vehicle tested in driving cycles simulating real–world driving conditions. Zesz. Nauk. Inst. Pojazdów Politech. Warsz. 2013, 1, 67–76. [Google Scholar]
- Ambrozik, A.; Kurczyński, D.; Łagowski, P.; Warianek, M. The toxicity of combustion gas from the Fiat 1.3 Multijet engine operating following the load characteristics and fed with rape oil esters. Proc. Inst. Veh. 2016, 1, 23–36. [Google Scholar]
- Lee, T.; Shin, M.; Lee, B.; Chung, J.; Kim, D.; Keel, J.; Lee, S.; Kim, I.; Hong, Y. Rethinking NOx emission factors considering on-road driving with malfunctioning emission control systems: A case study of Korean Euro 4 light-duty diesel vehicles. Atmos. Environ. 2019, 202, 212–222. [Google Scholar] [CrossRef]
- Hooftman, N.; Messagie, M.; Van Mierlo, J.; Coosemans, T. A review of the European passenger car regulations—Real driving emissions vs local air quality. Renew. Sustain. Energy Rev. 2018, 86, 1–21. [Google Scholar] [CrossRef]
- Kuklinska, K.; Wolska, L.; Namiesnik, J. Air quality policy in the U.S. and the EU—A review. Atmos. Pollut. Res. 2015, 6, 129–137. [Google Scholar] [CrossRef]
- Regulation (EC) No 443/2009 of the European Parliament and of the Council of 23 April 2009 Setting Emission Performance Standards for New Passenger Cars as Part of the Community’s Integrated Approach to Reduce CO2 Emissions from Light-Duty Vehicles (Text with EEA Relevance). Available online: https://eur-lex.europa.eu/ (accessed on 21 April 2020).
- Bocheńki, C. Biofuels in agriculture. Agric. Eng. 2008, 1, 23–26. [Google Scholar]
- Mendoza-Villafuerte, P.; Suarez-Bertoa, R.; Giechaskiel, B.; Riccobono, F.; Bulgheroni, C.; Astorga, C.; Perujo, A. NOx, NH3, N2O and PN real driving emissions from a Euro VI heavy-duty vehicle. Impact of regulatory on-road test conditions on emissions. Sci. Total Environ. 2017, 609, 546–555. [Google Scholar] [CrossRef]
- Triantafyllopoulos, G.; Dimaratos, A.; Ntziachristos, L.; Bernard, Y.; Dornoff, J.; Samaras, Z. A study on the CO2 and NOx emissions performance of Euro 6 diesel vehicles under various chassis dynamometer and on-road conditions including latest regulatory provisions. Sci. Total Environ. 2019, 666, 337–346. [Google Scholar] [CrossRef]
- Grigoratos, T.; Fontaras, G.; Giechaskiel, B.; Zacharof, N. Real world emissions performance of heavy-duty Euro VI diesel vehicles. Atmos. Environ. 2019, 201, 348–359. [Google Scholar] [CrossRef]
- Terzis, A.; Kirsch, M.; Vaikuntanathan, V.; Geppert, A.; Lamanna, G.; Weigand, B. Splashing characteristics of diesel exhaust fluid (AdBlue) droplets impacting on urea-water solution films. Exp. Therm. Fluid Sci. 2019, 102, 152–162. [Google Scholar] [CrossRef]
- Tucki, K.; Mruk, R.; Orynycz, O.; Wasiak, A.; Botwińska, K.; Gola, A. Simulation of the Operation of a Spark Ignition Engine Fueled with Various Biofuels and Its Contribution to Technology Management. Sustainability 2019, 11, 2799. [Google Scholar] [CrossRef]
- Xiao, H.; Guo, F.; Li, S.; Wang, R.; Yang, X. Combustion performance and emission characteristics of a diesel engine burning biodiesel blended with n-butanol. Fuel 2019, 258, 115887. [Google Scholar] [CrossRef]
- Huang, Y.; Ng, E.C.Y.; Yam, Y.S.; Lee, C.K.C.; Surawski, N.C.; Mok, W.C.; Organ, B.; Zhou, J.L.; Chan, E.F.C. Impact of potential engine malfunctions on fuel consumption and gaseous emissions of a Euro VI diesel truck. Energy Convers. Manag. 2019, 184, 521–529. [Google Scholar] [CrossRef]
- Merkisz, J.; Pielecha, I.; Pielecha, J.; Brudnicki, K. On-Road Exhaust Emissions from Passenger Cars Fitted with a Start-Stop System. Arch. Transp. 2011, 23, 37–46. [Google Scholar] [CrossRef][Green Version]
- Dobrzyńska, E.; Szewczyńska, M.; Pośniak, M.; Szczotka, A.; Puchałka, B.; Woodburn, J. Exhaust emissions from diesel engines fueled by different blends with the addition of nanomodifiers and hydrotreated vegetable oil HVO. Environ. Pollut. 2020, 259, 113772. [Google Scholar] [CrossRef] [PubMed]
- Odziemkowska, M.; Czarnocka, J.; Frankiewicz, A.; Szewczyńska, M.; Lankoff, A.; Gromadzka-Ostrowska, J.; Mruk, R. Chemical characterization of exhaust gases from compression ignition engine fuelled with various biofuels. Pol. J. Environ. Stud. 2017, 26, 1183–1190. [Google Scholar] [CrossRef]
- O’Driscoll, R.; Stettler, M.E.J.; Molden, N.; Oxley, T.; ApSimon, H.M. Real world CO2 and NOx emissions from 149 Euro 5 and 6 diesel, gasoline and hybrid passenger cars. Sci. Total Environ. 2018, 621, 282–290. [Google Scholar] [CrossRef]
- Bielaczyc, P.; Szczotka, A.; Pajdowski, P.; Woodburn, J. The potential of current European light duty LPG-fuelled vehicles to meet Euro 6 requirement. Combust. Engines 2015, 162, 874–880. [Google Scholar]
- Millo, F.; Giacominetto, P.F.; Bernardi, M.G. Analysis of different exhaust gas recirculation architectures for passenger car Diesel engines. Appl. Energy 2012, 98, 79–91. [Google Scholar] [CrossRef]
- Lozhkin, V.; Lozhkina, O.; Dobromirov, V. A study of air pollution by exhaust gases from cars in well courtyards of Saint Petersburg. Transp. Res. Procedia 2018, 36, 453–458. [Google Scholar] [CrossRef]
- Kilicarslan, A.; Qatu, M. Exhaust Gas Analysis of an Eight Cylinder Gasoline Engine Based on Engine Speed. Energy Procedia 2017, 110, 459–464. [Google Scholar] [CrossRef]
- Den Tonkelaar, W.A.M. CAR Smog: System for on-line extrapolation from hourly measurements to concentrations along standard roads within cities. Sci. Total Environ. 1996, 189–190, 423–429. [Google Scholar] [CrossRef]
- Frankowski, J. Attention: Smog alert! Citizen engagement for clean air and its consequences for fuel poverty in Poland. Energy Build. 2019, 207, 109525. [Google Scholar] [CrossRef]
- Gao, J.; Chen, H.; Li, Y.; Chen, J.; Zhang, Y.; Dave, K.; Huang, Y. Fuel consumption and exhaust emissions of diesel vehicles in worldwide harmonized light vehicles test cycles and their sensitivities to eco-driving factors. Energy Convers. Manag. 2019, 196, 605–613. [Google Scholar] [CrossRef]
- Mansour, C.; Nader, W.B.; Breque, F.; Haddad, M.; Nemer, M. Assessing additional fuel consumption from cabin thermal comfort and auxiliary needs on the worldwide harmonized light vehicles test cycle. Transp. Res. Part D Transp. Environ. 2018, 62, 139–151. [Google Scholar] [CrossRef]
- Gużda, A.; Szmolke, N. Variability of selected air parameters in the premises containing a car dynamometer. Autobusy 2017, 6, 208. [Google Scholar]
- Chen, L.; Wang, Z.; Liu, S.; Qu, L. Using a chassis dynamometer to determine the influencing factors for the emissions of Euro VI vehicles. Transp. Res. Part D Transp. Environ. 2018, 65, 564–573. [Google Scholar] [CrossRef]
- Li, T.; Chen, X.; Yan, Z. Comparison of fine particles emissions of light-duty gasoline vehicles from chassis dynamometer tests and on-road measurements. Atmos. Environ. 2013, 68, 82–91. [Google Scholar] [CrossRef]
- Gołębiewski, W.; Prajwowski, K. The use of road dynamometer to determine engine operating parameters. Autobusy 2014, 6, 100–104. [Google Scholar]
- Ruan, D.; Xie, H.; Song, K.; Zhang, G. Adaptive Speed Control based on Disturbance Compensation for Engine-Dynamometer System. IFAC-PapersOnLine 2019, 52, 642–647. [Google Scholar] [CrossRef]
- Kęder, M.; Grzeszczyk, R.; Merkisz, J.; Fuć, P.; Lijewski, P. Design of a new engine dynamometer test stand for driving cycle simulation. J. KONES 2014, 21, 217–224. [Google Scholar] [CrossRef]
- Huertas, J.I.; Giraldo, M.; Quirama, L.F.; Díaz, J. Driving Cycles Based on Fuel Consumption. Energies 2018, 11, 3064. [Google Scholar] [CrossRef]
- Pavlovic, J.; Ciuffo, B.; Fontaras, G.; Valverde, V.; Marotta, A. How much difference in type-approval CO2 emissions from passenger cars in Europe can be expected from changing to the new test procedure (NEDC vs. WLTP)? Transp. Res. Part A Policy Pract. 2018, 111, 136–147. [Google Scholar] [CrossRef]
- Mazer, M.; Hatschbach, L.; Dos Santos, I.; Silveira, J.; Garlet, R.A.; Martins, M.E.S.; Nora, M.D. Comparison between the WLTC and the FTP-75 Driving Cycles Applied to a 1.4 L Light-Duty Vehicle Running on Ethanol. Available online: https://www.sae.org/publications/technical-papers/content/2019-36-0144/ (accessed on 21 April 2020).
- Committee of Inquiry into Emission Measurements in the Automotive Sector. Working Document No. 12. on the Inquiry into Emission Measurements in the Automotive Sector—Appendix E: Glossary. Available online: https://www.europarl.europa.eu/doceo/document/EMIS-DT-594082_EN.pdf?redirect (accessed on 21 April 2020).
- Żółtowski, A. Comparison of pollutant emissions test cycles for ic engines. J. KONES Powertrain Transp. 2007, 14, 591–598. [Google Scholar]
- Tucki, K.; Mruk, R.; Baczyk, A.; Botwinska, B.; Wozniak, K. Analysis of the Exhaust Gas Emission Level from a Diesel Engine with Using Computer Simulation. Rocz. Ochr. Srodowiska 2018, 20, 1095–1112. [Google Scholar]
- Król, E. Comparison of emissions of electric and diesel vehicles. Napędy Sterow. 2017, 19, 140–143. [Google Scholar]
- Suchecki, A.; Nowakowski, J. Research during the approval process on a chassis and engine dynamometer. Badania 2015, 12, 1459–1463. [Google Scholar]
- Łączyński, J. Type aprval tests of the car designed for the transport of disable persons. Autobusy 2013, 3, 749–759. [Google Scholar]
- Wu, T.; Han, X.; Zheng, M.M.; Ou, X.; Sun, H.; Zhang, X. Impact factors of the real-world fuel consumption rate of light duty vehicles in China. Energy 2020, 190, 116388. [Google Scholar] [CrossRef]
- Karagöz, Y. Analysis of the impact of gasoline, biogas and biogas + hydrogen fuels on emissions and vehicle performance in the WLTC and NEDC. Int. J. Hydrogen Energy 2019, 44, 31621–31632. [Google Scholar] [CrossRef]
- Emission Standards. Summary of Worldwide Engine and Vehicle Emission Standards. Available online: https://dieselnet.com/standards/#eu (accessed on 21 April 2020).
- Franco, V.; Delgado, O.; Muncrief, R. Heavy-Duty Vehicle Fuel-Efficiency Simulation: A Comparison of Us and Eu Tools. Available online: https://theicct.org/sites/default/files/publications/ICCT_GEM-VECTO-comparison_20150511.pdf (accessed on 21 April 2020).
- Kocsis, L.; Iclodean, C.D.; Gaspar, F.; Burnete, N.V. Comparison of international vehicle testing cycles using simulation. Rom. J. Tech. Sci. 2018, 1, 25–35. [Google Scholar]
- Pavlovic, J.; Marotta, A.; Ciuffo, B. CO2 emissions and energy demands of vehicles tested under the NEDC and the new WLTP type approval test procedures. Appl. Energy 2016, 177, 661–670. [Google Scholar] [CrossRef]
- Dimaratos, A.; Tsokolis, D.; Fontaras, G.; Tsiakmakis, S.; Ciuffo, B.; Samaras, Z. Comparative Evaluation of the Effect of Various Technologies on Light-duty Vehicle CO2 Emissions over NEDC and WLTP. Transp. Res. Procedia 2016, 14, 3169–3178. [Google Scholar] [CrossRef]
- Massaguer, E.; Massaguer, A.; Pujol, T.; Comamala, M.; Montoro, L.; Gonzalez, J.R. Fuel economy analysis under a WLTP cycle on a mid-size vehicle equipped with a thermoelectric energy recovery system. Energy 2019, 179, 306–314. [Google Scholar] [CrossRef]
- Kim, J.; Choi, K.; Myung, C.L.; Lee, Y.; Park, S. Comparative investigation of regulated emissions and nano-particle characteristics of light duty vehicles using various fuels for the FTP-75 and the NEDC mode. Fuel 2013, 106, 335–343. [Google Scholar] [CrossRef]
- Choi, Y.; Lee, J.; Jang, J.; Park, S. Effects of fuel-injection systems on particle emission characteristics of gasoline vehicles. Atmos. Environ. 2019, 2017, 116941. [Google Scholar] [CrossRef]
- Roso, V.R.; Santos, N.D.S.A.; Valle, R.M.; Alvarez, C.E.C.; Monsalve-Serrano, J.; García, A. Evaluation of a stratified prechamber ignition concept for vehicular applications in real world and standardized driving cycles. Appl. Energy 2019, 254, 113691. [Google Scholar] [CrossRef]
- Puškár, M.; Jahnátek, A.; Kádárová, J.; Šoltésová, M.; Kovanič, L.; Krivosudská, J. Environmental study focused on the suitability of vehicle certifications using the new European driving cycle (NEDC) with regard to the affair “dieselgate” and the risks of NOx emissions in urban destinations. Air Qual. Atmos. Health 2019, 12, 251–257. [Google Scholar] [CrossRef]
- Shim, B.J.; Park, K.S.; Koo, J.M.; Jin, S.H. Work and speed based engine operation condition analysis for new European driving cycle (NEDC). J. Mech. Sci. Technol. 2014, 28, 755–761. [Google Scholar] [CrossRef]
- Pavlovic, J.; Fontaras, G.; Ktistakis, M.; Anagnostopoulos, K.; Komnos, D.; Ciuffo, B.; Clairotte, M.; Valverde, V. Understanding the origins and variability of the fuel consumption gap: Lessons learned from laboratory tests and a real-driving campaign. Environ. Sci. Eur. 2020, 32, 53. [Google Scholar] [CrossRef]
- EU: Light-Duty: New European Driving Cycle. Available online: https://www.transportpolicy.net/standard/eu-light-duty-new-european-driving-cycle/ (accessed on 21 April 2020).
- Degraeuwe, B.; Weiss, M. Does the New European Driving Cycle (NEDC) really fail to capture the NOX emissions of diesel cars in Europe? Environ. Pollut. 2017, 222, 234–241. [Google Scholar] [CrossRef] [PubMed]
- Bielaczyc, P.; Woodburn, J. Trends in Automotive Emission Legislation: Impact on LD Engine Development, Fuels, Lubricants and Test Methods: A Global View, with a Focus on WLTP and RDE Regulations. Emiss. Control Sci. Technol. 2019, 5, 86–98. [Google Scholar] [CrossRef]
- Pfaffelhuber, K.; Uhl, F. Engine Encapsulations for Fewer Cold Starts. ATZ Worldw. 2015, 117, 20–23. [Google Scholar] [CrossRef]
- Singh, T.; Balzer, D.; Leertouwer, K.; Wise, J. WLTP Regulations and Advanced Recuperation Strategies. ATZ Worldw. 2018, 120, 50–53. [Google Scholar] [CrossRef]
- From NEDC to WLTP: Effect on the Type-Approval CO2 Emissions of Light-Duty Vehicles. Available online: https://ec.europa.eu/jrc/en/publication/eur-scientific-and-technical-research-reports/nedc-wltp-effect-type-approval-co2-emissions-light-duty-vehicles (accessed on 21 April 2020).
- Commission Regulation (EU) 2018/1832 of 5 November 2018 amending Directive 2007/46/EC of the European Parliament and of the Council, Commission Regulation (EC) No 692/2008 and Commission Regulation (EU) 2017/1151 for the Purpose of Improving the Emission Type Approval Tests and Procedures for Light Passenger and Commercial Vehicles, Including Those for In-Service Conformity and Real-Driving Emissions and Introducing Devices for Monitoring the Consumption of Fuel and Electric Energy (Text with EEA Relevance.) C/2018/6984. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32018R1832 (accessed on 21 April 2020).
- Tsiakmakis, S.; Fontaras, G.; Anagnostopoulos, K.; Ciuffo, B.; Pavlovic, J.; Marotta, A. A simulation based approach for quantifying CO2 emissions of light duty vehicle fleets. A case study on WLTP introduction. Transp. Res. Procedia 2017, 25, 3898–3908. [Google Scholar] [CrossRef]
- United States Environmental Protection Agency. Vehicle and Fuel Emissions Testing. Available online: https://www.epa.gov/vehicle-and-fuel-emissions-testing/dynamometer-drive-schedules (accessed on 21 April 2020).
- Myung, C.L.; Jang, W.; Kwon, S.; Ko, J.; Jin, D.; Park, S. Evaluation of the real-time de-NOx performance characteristics of a LNT-equipped Euro-6 diesel passenger car with various vehicle emissions certification cycles. Energy 2017, 132, 356–369. [Google Scholar] [CrossRef]
- Wi, H.; Park, J. Analyzing uncertainty in evaluation of vehicle fuel economy using FTP-75. Int. J. Automot. Technol. 2013, 14, 471–477. [Google Scholar] [CrossRef]
- Chan, T.W.; Meloche, E.; Kubsh, J.; Brezny, R. Black Carbon Emissions in Gasoline Exhaust and a Reduction Alternative with a Gasoline Particulate Filter. Environ. Sci. Technol. 2014, 48, 6027–6034. [Google Scholar] [CrossRef]
- Schifter, I.; Díaz, L.; Rodríguez, R.; Salazar, L. Oxygenated transportation fuels. Evaluation of properties and emission performance in light-duty vehicles in Mexico. Fuel 2011, 90, 779–788. [Google Scholar] [CrossRef]
- Samuel, S.; Austin, L.; Morrey, D. Automotive test drive cycles for emission measurement and real-world emission levels—A review. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2002, 216, 555–564. [Google Scholar] [CrossRef]
- Oh, C.; Cha, G. Impact of fuel, injection type and after-treatment system on particulate emissions of light-duty vehicles using different fuels on FTP-75 and HWFET test cycles. Int. J. Automot. Technol. 2015, 16, 895–901. [Google Scholar] [CrossRef]
- Vehicle Standard (Australian Design Rule 79/00—Emission Control for Light Vehicles). 2005. Available online: https://www.legislation.gov.au/Details/F2005L04079/Explanatory%20Statement/Text (accessed on 21 April 2020).
- Dallmann, T.; Façanha, C. International Comparison of Brazilian Regulatory Standards for Light-Duty Vehicle Emissions. Available online: https://theicct.org/sites/default/files/publications/Brazil-LDF-Regs_White-Paper_ICCT_13062017_vF_revised.pdf (accessed on 21 April 2020).
- Alvarez, R.; Weilenmann, M.; Favez, J.Y. Assessing the real-world performance of modern pollutant abatement systems on motorcycles. Atmos. Environ. 2009, 43, 1503–1509. [Google Scholar] [CrossRef]
- Giechaskiel, B.; Suarez-Bertoa, R.; Lahde, T.; Clairotte, M.; Carriero, M.; Bonnel, P.; Maggiore, M. Emissions of a Euro 6b Diesel Passenger Car Retrofitted with a Solid Ammonia Reduction System. Atmosphere 2019, 10, 180. [Google Scholar] [CrossRef]
- Sileghem, L.; Bosteels, D.; May, J.; Favre, C.; Verhelst, S. Analysis of vehicle emission measurements on the new WLTC, the NEDC and the CADC. Transp. Res. Part D Transp. Environ. 2014, 32, 70–85. [Google Scholar] [CrossRef]
- Demuynck, J.; Bosteels, D.; De Paepe, M.; Favre, C.; May, J.; Verhelst, S. Recommendations for the new WLTP cycle based on an analysis of vehicle emission measurements on NEDC and CADC. Energy Policy 2012, 49, 234–242. [Google Scholar] [CrossRef]
- Chindamo, D.; Gadola, M. What is the Most Representative Standard Driving Cycle to Estimate Diesel Emissions of a Light Commercial Vehicle? IFAC-PapersOnLine 2018, 51, 73–78. [Google Scholar] [CrossRef]
- Tucki, K.; Orynycz, O.; Wasiak, A.; Swic, A.; Mruk, R.; Botwinska, K. Estimation of Carbon Dioxide Emissions from a Diesel Engine Powered by Lignocellulose Derived Fuel for Better Management of Fuel Production. Energies 2020, 13, 561. [Google Scholar] [CrossRef]
- Jahn, R.M.; Syré, A.; Grahle, A.; Schlenther, T.; Göhlich, D. Methodology for Determining Charging Strategies for Urban Private Vehicles based on Traffic Simulation Results. Procedia Comput. Sci. 2020, 170, 751–756. [Google Scholar] [CrossRef]
- Tsiakmakis, S.; Fontaras, G.; Dornoff, J.; Valverde, V.; Komnos, D.; Ciuffo, B.; Mock, P.; Samaras, Z. From lab-to-road & vice-versa: Using a simulation-based approach for predicting real-world CO2 emissions. Energy 2019, 169, 1153–1165. [Google Scholar]
- Mecc Alte. Available online: https://www.meccalte.com/en/products (accessed on 21 April 2020).
- Campbell, S.L.; Chancelier, J.P.; Nikoukhah, R. Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4, 1st ed.; Springer: New York, NY, USA, 2006; pp. 73–155. [Google Scholar]
- Lachowicz, C.T. Matlab, Scilab, Maxima: Opis i Przykłady Zastosowań, 1st ed.; Oficyna Wydawnicza Politechniki Opolskiej: Opole, Poland, 2005; pp. 120–310. [Google Scholar]
- Brozi, A. Scilab w Przykładach, 1st ed.; Wydawnictwo Nakom: Poznań, Poland, 2007; pp. 62–209. [Google Scholar]
- Commission Recommendation of 31.5.2017 on the Use of Fuel Consumption and CO2 Emission Values Type-Approved and Measured in Accordance with the World Harmonised Light Vehicles Test Procedure When Making Information Available for Consumers Pursuant to Directive 1999/94/EC of the European Parliament and of the Council. Available online: https://ec.europa.eu/transport/sites/transport/files/c20173525-recommendation-wltp.pdf (accessed on 21 April 2020).
- CO2 Targets Are Becoming ever More Demanding Worldwide. Available online: https://www.daimler.com/sustainability/vehicles/climate-protection/wltp/wltp-part-5.html (accessed on 21 April 2020).
- Blanco-Rodriguez, D.; Vagnoni, G.; Holderbaum, B. EU6 C-Segment Diesel vehicles, a challenging segment to meet RDE and WLTP requirements. IFAC-PapersOnLine 2016, 49, 649–656. [Google Scholar] [CrossRef]
- OpenModelica. Available online: https://www.openmodelica.org/ (accessed on 21 April 2020).
- Hirano, Y. Application of Modelica to Development of Future New-concept Vehicles. IFAC Proc. Vol. 2013, 46, 428–433. [Google Scholar] [CrossRef]
- Cafferkey, N.; Provan, G. An Analysis of Performance-critical Properties of Modelica Models. IFAC-PapersOnLine 2015, 48, 210–215. [Google Scholar] [CrossRef]
- Library for Electric Machines. Modelica Electrical Machines Examples. Available online: https://www.maplesoft.com/documentation_center/online_manuals/modelica/Modelica_Electrical_Machines_Examples.html (accessed on 21 April 2020).












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tucki, K.; Wasiak, A.; Orynycz, O.; Mruk, R. Computer Simulation as a Tool for Managing the Technical Development of Methods for Diagnosing the Technical Condition of a Vehicle. Energies 2020, 13, 2869. https://doi.org/10.3390/en13112869
Tucki K, Wasiak A, Orynycz O, Mruk R. Computer Simulation as a Tool for Managing the Technical Development of Methods for Diagnosing the Technical Condition of a Vehicle. Energies. 2020; 13(11):2869. https://doi.org/10.3390/en13112869
Chicago/Turabian StyleTucki, Karol, Andrzej Wasiak, Olga Orynycz, and Remigiusz Mruk. 2020. "Computer Simulation as a Tool for Managing the Technical Development of Methods for Diagnosing the Technical Condition of a Vehicle" Energies 13, no. 11: 2869. https://doi.org/10.3390/en13112869
APA StyleTucki, K., Wasiak, A., Orynycz, O., & Mruk, R. (2020). Computer Simulation as a Tool for Managing the Technical Development of Methods for Diagnosing the Technical Condition of a Vehicle. Energies, 13(11), 2869. https://doi.org/10.3390/en13112869