1. Introduction
With the increasing use of electric vehicles worldwide, the industry’s technical requirements for its core component—the electric drive system—continue to increase [
1]. In recent years, the Permanent Magnet Synchronous Motor (PMSM) concept has attracted more and more attention in electric vehicle applications due to its high density, great efficiency, small size, light weight, and low cost [
2,
3]. The corresponding technologies of the PMSM drive system have become a research hotspot among scholars at home and abroad. Generally, the PMSM drive system is equipped with current, speed and position sensors to obtain the feedback signals of three-phase stator current, motor speed and position, which are required for the closed-loop control operation of the system. Obviously, the normal operation of various types of sensors is a basic guarantee to achieve stable and reliable operation of the PMSM drive system. However, due to the increasingly complex working environment, aging of devices and external interference, the sensors in the system are prone to failure, resulting in deviations in the feedback signals of the control system, which in turn affects the control performance and, in severe cases, even causes damage to other electrical equipment. Therefore, the fault diagnosis and fault-tolerance control of sensors in the PMSM drive system of electric vehicles are of great importance.
At present, the methods for sensor fault diagnosis and fault-tolerant control of PMSM drive systems can be divided into two categories: data-driven methods and analytical model-based methods. Data-driven methods do not require the establishment of accurate mathematical models. However, large amounts of data are needed to obtain prior knowledge so as to achieve fault diagnosis through data analysis. Data-driven methods have good diagnostic effect on sensor faults, but can hardly provide reliable fault-tolerant control [
4,
5]. Analytical model-based methods mainly establish a mathematical analytic model based on the operating state of system, and construct residuals and other physical signals for fault diagnosis and fault-tolerant control. The three main methods are as follows: (1) The current reconstruction method [
6,
7,
8]. This method estimates the current by reconstructing space vectors to achieve sensor fault diagnosis and fault-tolerant control. Though it is simple and satisfies the requirements of corresponding systems for stable operation under current sensor fault, it cannot be applied universally due to the great difference in the current reconstruction methods of different systems. (2) The Luenberger-based observer method [
9,
10,
11]. In this method, the establishment of the Luenberger observer can solve the universality problem effectively, but the observer is highly susceptible to the influence of parameter changes and external disturbances, which may even cause misdiagnosis or missed diagnosis. (3) The sliding mode observer-based method [
12,
13]. The sliding mode observer has stronger robustness and anti-disturbance than the Luenberger observer and can improve the diagnostic accuracy of the system, but its mathematical model is often complicated due to the high electromagnetic coupling of the motor drive system.
The above methods are widely used in fault diagnosis and fault-tolerant control of a single sensor in PMSM drive system, and have achieved good results. In the actual system, faults may occur to all kinds of sensors, so considering the faults of a single sensor alone cannot guarantee the stable operation of the system. Hence, the fault-tolerant control for multiple types of sensor faults is particularly important. Currently, research mainly focuses on the establishment of multiple observers based on analytical model methods to realize multi-sensor fault diagnosis and fault-tolerant control of PMSM drive system [
14,
15]. Among them, [
14] comprehensively considered the faults in three types of sensors: DC side voltage sensor, AC side current sensor and motor speed sensor of the PMSM drive system. Two high-order sliding mode observers and one Luenberger observer were designed, in which the high-order sliding mode observers estimated the system voltage and speed, respectively, while the Luenberger observer estimated the system current. The three observers operated in parallel so as to realize diagnosis and fault-tolerant control of the voltage, current and speed sensor faults of the PMSM drive system. Though it enhanced the robust performance of the system, the integral effect of the high-order sliding mode had an impact on the fast response characteristics of the system. Ref. [
15] also designed the self-adaptive observer, Luenberger observer and speed sensorless observer for the three types of sensors to estimate the corresponding voltage, current and speed. High frequency signals were injected into the low speed interval to improve the system performance. The diagnosis and fault tolerance control was relatively fast, as there was no integral term. However, both [
14] and [
15] required multiple observers to operate at the same time, which not only complicated the algorithm but also increased the time cost of the system. Also, multiple observers often interacted with each other when operating in parallel, thus reducing the overall system performance. On the other hand, for the PMSM drive system, the establishment of multiple observers will reduce the sensitivity of the various components of the system and the overall reliability of the system to a certain extent [
16], which affects the accuracy of fault diagnosis and the effectiveness of fault-tolerant control.
In summary, accurate diagnosis of sensor faults in PMSM drive systems is the basic premise for fault-tolerant control. In the process of fault diagnosis based on an observer, the selection of the threshold of each observation variable affects the accuracy of the sensor fault diagnosis directly. If the threshold is too small, when there is noise interference in the system or the model is biased, not only will misdiagnosis occur but also faulty fault-tolerant control will be triggered, which will cause safety problems for the PMSM system. On the contrary, if the threshold is too large, there will be a possibility of missed diagnosis, which increases the security risk of the system as well. At present, there are three main methods to set the thresholds for sensor fault diagnosis of PMSM drive system: (1) By observing the difference of residuals [
17]. This method only considers the single influence of the observation errors, so the overall diagnostic accuracy of the system is low. (2) By considering noise [
12]. The observation errors and measurement noise are both taken into consideration to minimize misdiagnosis rate and improve fault detection efficiency. (3) By considering parameter variations [
14]. This method further considers the influence of system parameter variations on the basis of observation errors and measurement noise, so the diagnostic accuracy can be further improved. However, in actual operation, the permanent magnet of the PMSM is prone to demagnetization due to the influence of temperature, mechanical action, and armature reaction magnetic field, which affects the residual values of observed variables [
18]. If the demagnetization is not considered when setting the threshold, it is very likely that misdiagnosis will occur.
In view of the multi-sensor fault problems, a composite sliding mode observer is designed in this paper based on the double closed-loop current and speed control strategy of the PMSM control system [
19]. A single observer is used to observe and estimate the various state variables in real time, which simplifies not only the implementation of the observer-related algorithm but also the sensor fault diagnosis and isolation control algorithm. Meanwhile, in order to improve the diagnostic accuracy of system under multi-sensor faults, a method for determining the fault thresholds is proposed through global search for the maximum residual value. Based on this, a fault diagnosis and active fault-tolerant control strategy is proposed to realize fast switching and reconstruction of feedback signals of closed-loop control systems under different faults of multiple sensors, thus restoring the system performance. Finally, the effectiveness of the proposed algorithm and control strategy is verified by simulating the occurrence of different faults of the three types of sensors.
2. Overall Control Process of the Proposed Fault Diagnosis and Active Fault-Tolerant Control System
During normal operation, the PMSM drive system requires current, speed and position sensors [
20], in which the position sensor is difficult to install due to its large size and high cost. It also increases the moment of inertia of the bearing and affects the dynamic and steady-state characteristics and robustness of the system. In recent years, some scholars have developed sensorless motor position control technologies based on indirect detection of the rotor position [
21,
22], which have found wide applications. With low cost and easy implementation in mind and on the basis of the traditional PMSM control system based on current and speed double closed-loop, this paper designs a composite sliding mode observer to observe and estimate multiple variables of the system. Studies are conducted on the fault diagnosis and active fault-tolerant control of the three-phase current sensors and motor speed sensor of the PMSM drive system.
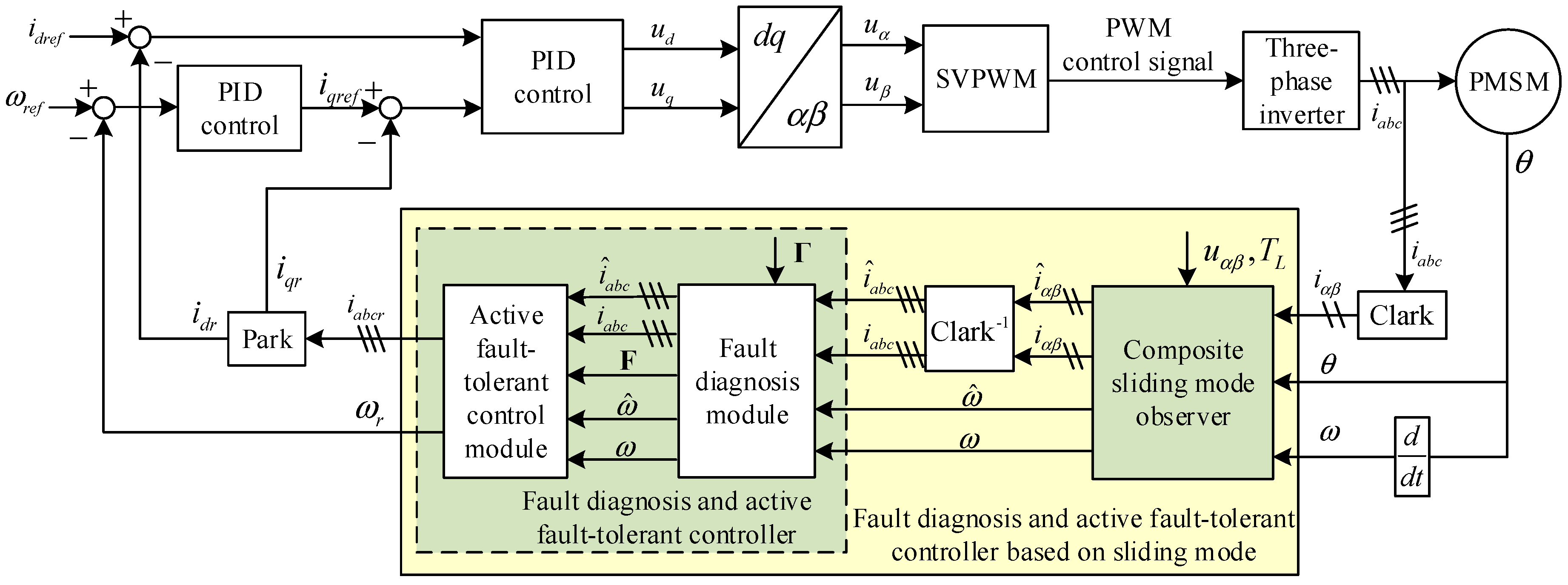
As shown in
Figure 1, among the fault diagnosis and active fault-tolerant control system, the fault diagnosis and active fault-tolerant controller based on sliding mode mainly includes two parts: a composite sliding mode observer and a fault diagnosis and active fault-tolerant controller. The corresponding fault-tolerant control is as follows: (1) Establish the fault thresholds of the system-related variables Γ = [Γ
ia Γ
ib Γ
ic Γ
ω]
T offline. Store the values in the fault diagnosis module, including the three-phase current thresholds Γ
ia, Γ
ib, Γ
ic and the speed threshold Γ
ω. (2) During system operation, the composite sliding mode observer estimates, in real time, the three-phase current and speed signals in the system, and inputs the corresponding estimated values and the measured values of the sensor altogether into the fault diagnosis module. (3) The fault diagnosis module generates the system residuals in real time according to the estimated values and the measured values of the three-phase current and speed signals, and compares them with the thresholds for fault diagnosis. (4) Based on the fault diagnosis results, the active fault-tolerant control module designs a corresponding algorithm to reconstruct and change the current and speed feedback signals of the original closed-loop control system, thereby eliminating the influence of the faulty sensor and achieving active fault-tolerant control under sensor fault.
The following sections will design a composite sliding mode observer as well as a fault diagnosis and active fault-tolerant controller based on the established PMSM mathematical model to realize fault diagnosis and active fault-tolerant control of sensors in the PMSM drive system.
3. The Design of Composite Sliding Mode Observer
3.1. PMSM Mathematical Model
The mathematical model of PMSM in an
α −
β two-phase stationary coordinate system includes stator voltage equation, stator flux linkage equation, electromagnetic torque equation and motion Equation [
23].
The corresponding stator voltage equation is:
The stator flux linkage equation is:
The electromagnetic torque equation is:
In the above equations, uα and uβ are stator voltages, iα and iβ are stator currents, ψα and ψβ are stator fluxes, Rs and Ls are stator resistance and inductance, respectively, ω is the rotor angular velocity, θ is the rotor position angle, ψf is the rotor permanent magnet flux, Te is the electromagnetic torque, TL is the load torque, np is the pole pair of the motor, and J is the moment of inertia.
From Equations (1)–(4), we obtain:
Meanwhile, the relationship between the stator currents and voltages in the
abc three-phase coordinate system and the stator currents and voltages in the
α −
β two-phase coordinate system is as follows:
where
ua,
ub and
uc are the stator voltages in the three-phase coordinate system, and
ia,
ib and
ic are the stator currents in the three-phase coordinate system.
Then, we have the state space model [
24] of the PMSM drive system.
where
x = [
iα iβ ω]
T is the state variable,
u = [
uα uβ TL]
T is the input vector,
y = [
ω] is the output vector, and the coefficient matrixes are:
3.2. Composite Sliding Mode Observer Design
According to the state space model of PMSM in the
α −
β two-phase stationary coordinate system, the composite sliding mode observer is constructed as:
where
,
,
and
are the estimated values of
iα,
iβ and
ω, respectively,
v is a nonlinear discontinuous term, and
Gn is a gain matrix.
Suppose that the system state estimation error is defined as:
The system output estimation error is defined as:
Then, for a composite sliding mode observer, the sliding mode surface is designed as:
The nonlinear discontinuous high-frequency switching term
v is likely to cause system chattering [
25], thus increasing the computational burden. Therefore, the discontinuity of
v should be “smoothed” to avoid or alleviate system chattering. In order to make the system state variables approximate the sliding mode surface, this paper uses the sigmoid function to define the approximate smoothing term as:
where
ρ is a positive real scalar.
Suppose that the gain matrix
Gn has the following structure, namely,
Gn =
diag(
g1,
g2,−1),
g1,
g2 ∈
R. From Equations (5), (8), (11), and (12), we can obtain
and
in the system:
With the above equation, the stator currents and speed of the motor can be observed and estimated in real time, paving the way for subsequent fault diagnosis and active fault-tolerant control. It can be proved that the sliding mode observer designed based on the above method is stable and feasible, and the corresponding gain matrix Gn and the positive scalar ρ can be derived. What follows is the proof and the specific derivation process.
According to the structure of the coefficient matrix C in the composite sliding mode observer, the system state estimation error defined by Equation (9) can be further broken into e = [e1 ey]T, e1 ∈ R2×1. Meanwhile, the Lyapunov function is defined as V = 1/2eTe.
In order for the system to reach the sliding mode surface within a limited time from any initial state, it must satisfy the condition
V& < 0. Namely:
To prove
, we can first prove that the following two equations are valid:
The proof of Equation (15) is as follows:
According to Equations (7) and (8), we have:
It can be broken up into:
where
,
,
,
,
,
,
.
Multiplying both sides by
ey we have:
When the positive scalar
ρ satisfies the following:
where ζ ∈
R+, then Equation (15) can be proved, that is,
.
The proof of Equation (16) is as follows:
When the positive scalar
ρ satisfies Equation (21), and assume that there is no model mismatch or disturbances, the system output estimation error will converge to zero in a finite time. At this point, Equation (18) can be approximated as:
In order to make the system in a stable reduced-order motion when entering the sliding mode [
26], it is necessary to ensure that the determinant of coefficient matrix in Equation (22) is less than zero:
Therefore, when the parameters
g1 and
g2 in the gain matrix
Gn satisfy the following equation, Equation (16) can be proved, that is,
:
In summary, when the sliding mode observer parameters (
g1 and
g2) and the positive scalar
ρ satisfy Equation (26), we have
. Then, the sliding mode observer proposed above is accessible in the state space:
3.3. Anti-Disturbance Performance Analysis of the Composite Sliding Mode Observer
From the previous analysis, we know that scholars at home and abroad tend to use the classic Luenberger observer to deal with sensor failures in the motor drive system. By comparison, the composite sliding mode observer proposed in this paper has better anti-disturbance performance. The detailed analysis is given below.
Let the interference signal be
ξ(
t) and its distribution matrix be
Q. Then the state space model described by Equation (7) becomes:
The distribution matrix
Q matches the gain matrix
Gn, and there exists a matrix
X which satisfies Equation (28):
At this time, the state estimation error is
(
t) +
(
t) −
Qξ(
t). After it is partitioned, Equation (18) is expressed as:
When
ρ > |
A21e1 +
A22ey +
Xξ| > 0, the trajectory of the system output estimation error will converge towards a minimal region from which they do not escape, and Equation (29) can be expressed as:
The approximated reduced-order motion expression of the system can be obtained , in agreement with Equation (22). It is independent of the interference signal ξ(t), which means that the composite sliding mode observer of the system is not affected by the interference signal and has good anti-disturbance performance.
5. Simulation Verification
In order to validate the fault diagnosis and active fault-tolerant control strategy based on the composite sliding mode observer, this paper builds a simulation model of PMSM double closed-loop control system for electric vehicles based on
Figure 1 on the MATLAB/Simulink platform. The proposed method is verified by simulating various faults of current and speed sensors. The specific simulation parameters are shown in
Table 1.
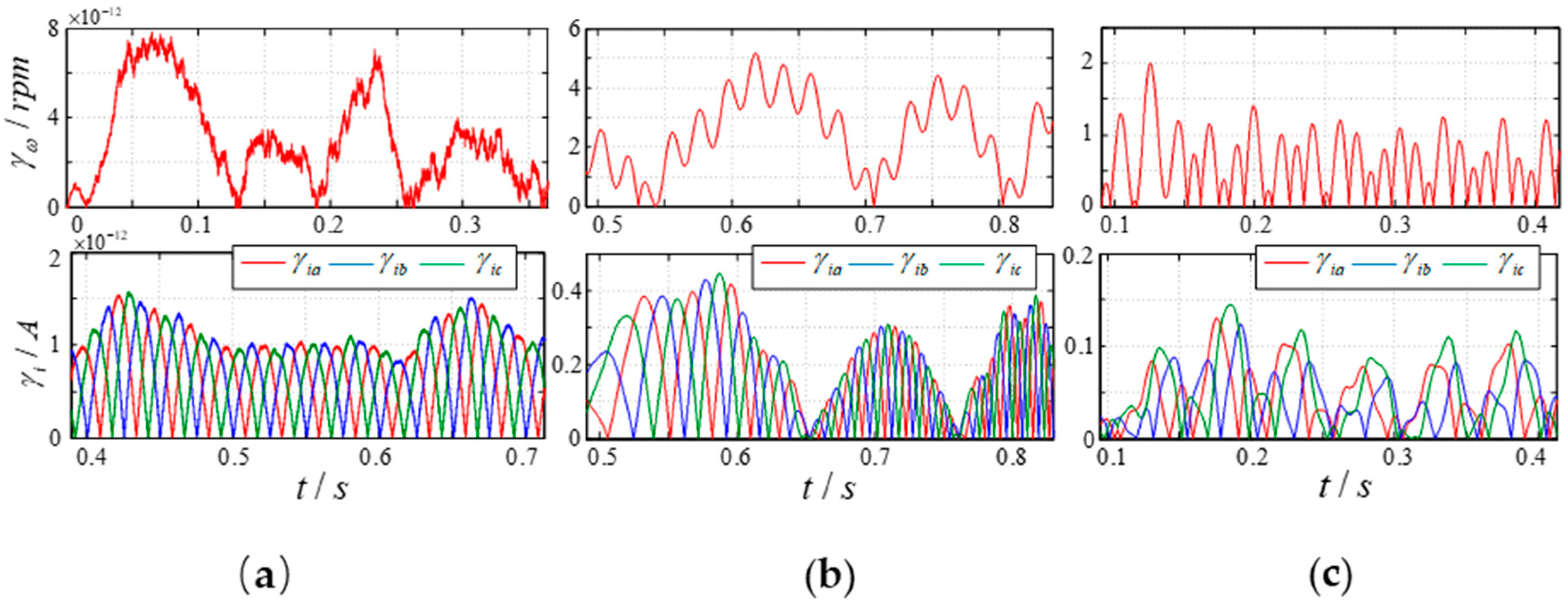
Before simulating the sensor fault diagnosis and fault-tolerant control, the thresholds of three-phase current and speed signals need to be set first. PMSM under no-load operation, under 40% demagnetization of the permanent magnet and under rated load is separately simulated, and corresponding simulation waveforms for the residuals of the current and speed signals are shown in
Figure 3. Comparing the three simulation waveforms, the corresponding residuals of the signals under 40% demagnetization of the permanent magnet shown in
Figure 3b are all higher than the other two cases, which is
γiabcmax = 0.4 A,
γωmax ≈ 5 rpm.
Therefore, by searching for the maximum value of the residuals globally and leaving a certain margin, we can determine the fault thresholds of the signals are Γia = Γib = Γic = 2 A, Γω = 9 rpm. The threshold is equivalent to the value determined by the existing threshold setting method mentioned above.
So based on the fault thresholds, simulation analysis and verification can be performed on fault diagnosis and fault tolerance of various types of sensors.
5.1. Simulation I
The operating characteristics of the PMSM closed-loop control system based on the composite sliding mode observer are analyzed in the case of no sensor fault to verify the effectiveness of the proposed sliding mode observer.
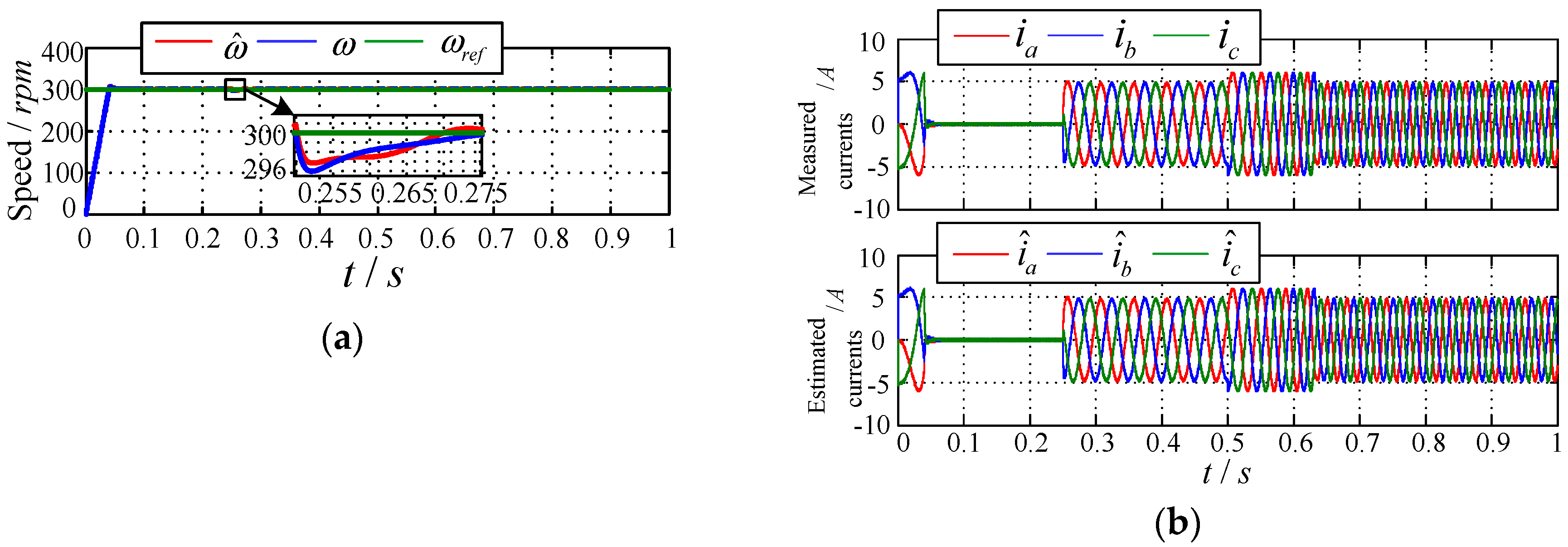
5.1.1. Normal Operation
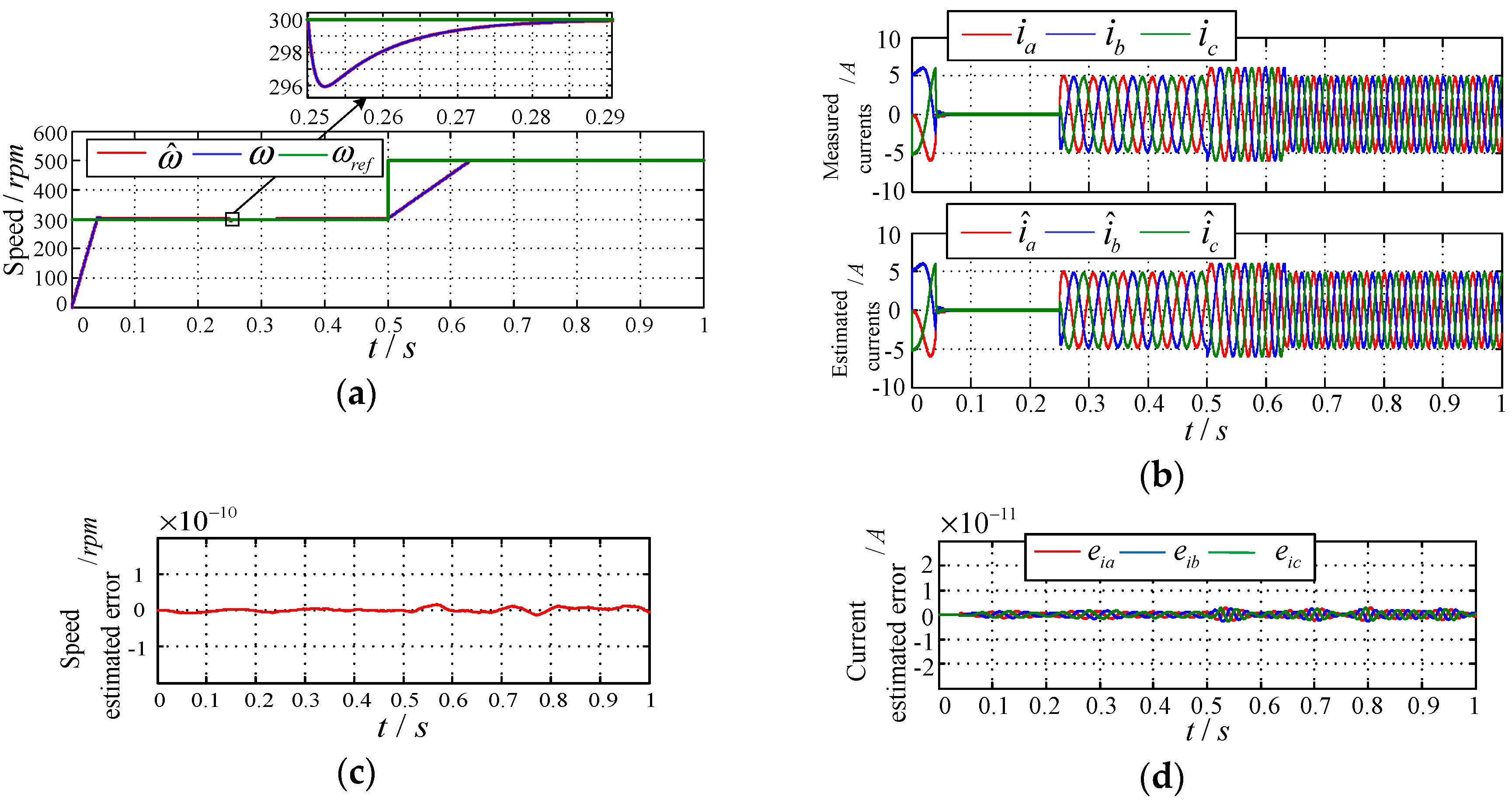
Assume the motor starts at
t = 0 without load, and the given starting rotation speed is
ωref = 300 rpm. After it is steady, apply a load torque
TL = 5 N·m at
t = 0.25 s. At the moment
t = 0.5 s, the given speed increases sharply to
ωref = 500 rpm. The overall simulation time is 1 s, and the simulation result is shown in
Figure 4.
It can be seen that the constructed composite sliding mode observer can estimate well the PMSM stator current and speed signals, and the error maintains at a small value near zero. When the system load torque or reference changes, the system fluctuations are small and the sliding mode tracking rate is fast. It indicates the good performance of the closed-loop control system and sliding mode control, thus verifying the effectiveness of the composite sliding mode observer proposed in this paper.
5.1.2. Disturbance Operation
Without loss of generality, the disturbance signal chosen in this paper is
ξ(
t) = 0.2sin(300
t), and its distribution matrix
Q =
diag(1,1,−1) matches the matrix
Gn. Similarly, the motor starts without load, with the given starting rotation speed being
ωref = 300 rpm, and a disturbance signal
ξ(
t) is added to the system at the same time. After it is steady, apply a load torque
TL = 5 N·m at
t = 0.25 s. The overall simulation time is 1 s, and the simulation result is shown in
Figure 5.
Analysis of the waveforms shows that the interference signal added to the system does not affect the operation of the composite sliding mode observer and the estimated signal still matches the corresponding signal well. It is consistent with the previous theoretical analysis, and verifies the good robust performance and anti-disturbance performance of the composite sliding mode observer.
5.2. Simulation II
In this case, the effectiveness of the fault diagnosis and active fault-tolerant control strategy proposed in this paper is verified by simulating different types of sensor fault. In the simulation, it is assumed that there are three faults—a-phase current sensor being stuck, b-phase current sensor constant deviation, and speed sensor constant gain fault, and all faults occur at tf = 0.6 s.
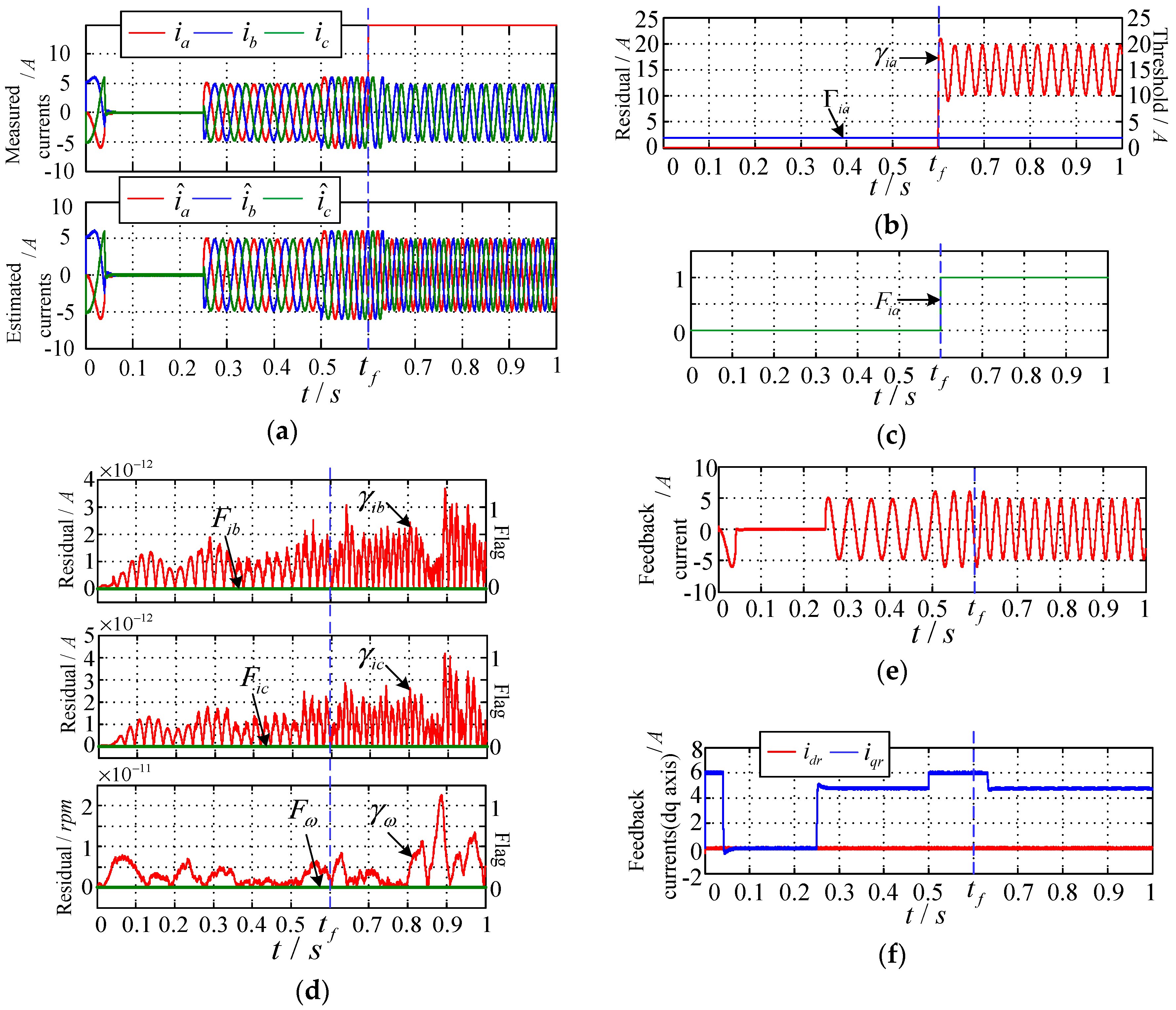
5.2.1. a-Phase Current Sensor Being Stuck
Assume
K = 15 when the
a-phase current sensor is stuck, and the corresponding simulation waveforms are shown in
Figure 6.
It can be seen that at
t = 0.6 s, the measured signal of
a-phase stator current changes abruptly. At this time, the estimation of the three-phase stator current by the sliding mode observer is not affected, and the estimated current is still
, so
. Then,
Fia changes from 0 to 1, indicating that the
a-phase current sensor is faulty. However, the
b-phase and
c-phase current sensors and the speed sensor are working normally, and the residual is far less than the set threshold. The fault flag remains 0, which means that they are not affected by the
-phase current sensor failure. In this way, through fault-tolerant reconstruction and control of the feedback signal, the closed-loop feedback signals can be obtained,
iar = 0 ×
ia + 1 ×
,
ibr =
ib,
icr =
ic,
ωr =
ω. So the
a-phase current feedback signal changes from the measured signal to the estimated signal at the time of failure, while the
a-phase and
a-phase current and speed feedback signals are still composed of the measured signals of corresponding sensors. Thus, the
a-phase sensor fault does not produce adverse effects on the system. Further analysis of
Figure 6f shows that the closed-loop feedback signal of three-phase current still maintains good symmetry, and the overall system control strategy and algorithm are not impacted by the
a-phase current sensor fault, which ensures the safe and stable operation of the system.
5.2.2. b-Phase Current Sensor Constant Deviation
Assume
n = 8 when the
b-phase current sensor has a constant deviation fault, and the corresponding simulation waveforms are shown in
Figure 7.
It can be seen that at
t = 0.6 s, the measured signal
ib of
b-phase stator current is superimposed a constant deviation. At this time, the estimation of the three-phase stator current by the sliding mode observer is not affected, and the estimated current is still
, so
. Then,
Fib changes from 0 to 1, indicating that the
b-phase current sensor is faulty. However, the
a-phase and
c-phase current sensors and the speed sensor are working normally, and the residual is far less than the set threshold. The fault flag remains 0, which means that they are not affected by the
b-phase current sensor failure. In this way, through fault-tolerant reconstruction and control of the feedback signal, the closed-loop feedback signals can be obtained,
ibr = 0 ×
ib + 1 ×
,
iar =
ia,
icr =
ic,
ωr =
ω, so the
b-phase current feedback signal changes from the measured signal to the estimated signal at the time of failure, while the
a-phase and
c-phase current and speed feedback signals are still composed of the measured signals of corresponding sensors. Thus, the
b-phase sensor fault does not produce adverse effects on the system. Further analysis of
Figure 7f shows that the closed-loop feedback signal of three-phase current still maintains good symmetry, and the overall system control strategy and algorithm are not impacted by the
b-phase current sensor fault, which ensures the safe and stable operation of the system.
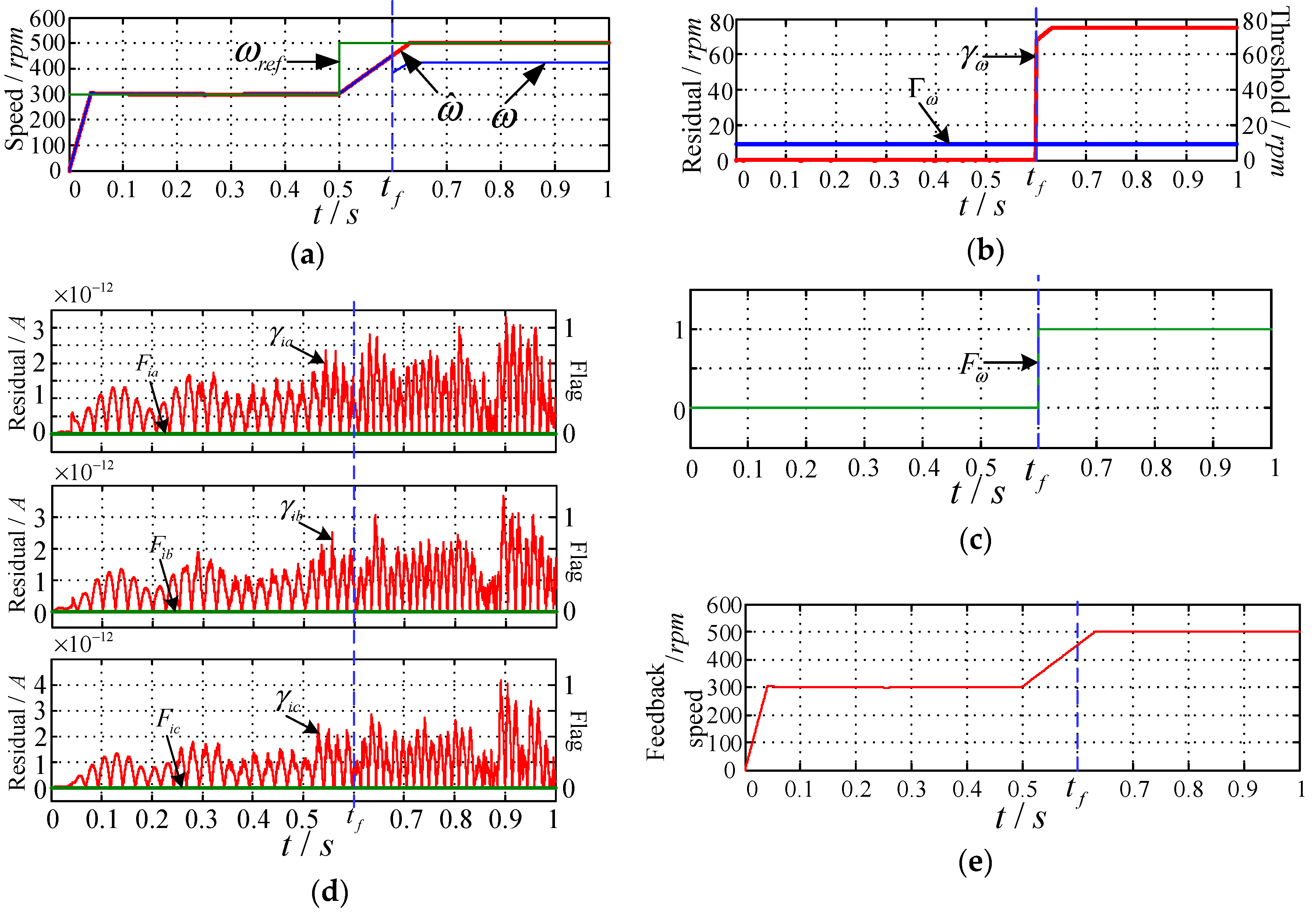
5.2.3. Speed Sensor Constant Gain Fault
Assume
m = 0.85 when the speed sensor has a constant gain fault, and the corresponding simulation waveforms are shown in
Figure 8. It can be seen that at
t = 0.6 s, the measured signal of speed changes abruptly. At this time, the estimation of speed by the sliding mode observer is not affected, and the estimated speed is still
, so
. Then,
Fω changes from 0 to 1, indicating the speed sensor is faulty. However, the three-phase current sensors are working normally, and the residual is far less than the set threshold. The fault flag remains 0, which means that it is not affected by the speed sensor failure. In this way, through fault-tolerant reconstruction and control of the feedback signal, the closed-loop feedback signals can be obtained,
ωr = 0 ×
ω + 1 ×
=
,
iar =
ia,
ibr =
ib,
icr =
ic, so the speed feedback signal changes from the measured signal to the estimated signal at the time of failure, while the three-phase current feedback signals are still composed of the measured signals of corresponding sensors. Thus, the speed sensor fault does not produce adverse effects on the system.
Based on the simulation and analysis of the above three modes of failure, the effectiveness of the fault diagnosis and active fault-tolerant control strategy proposed in this paper is verified.
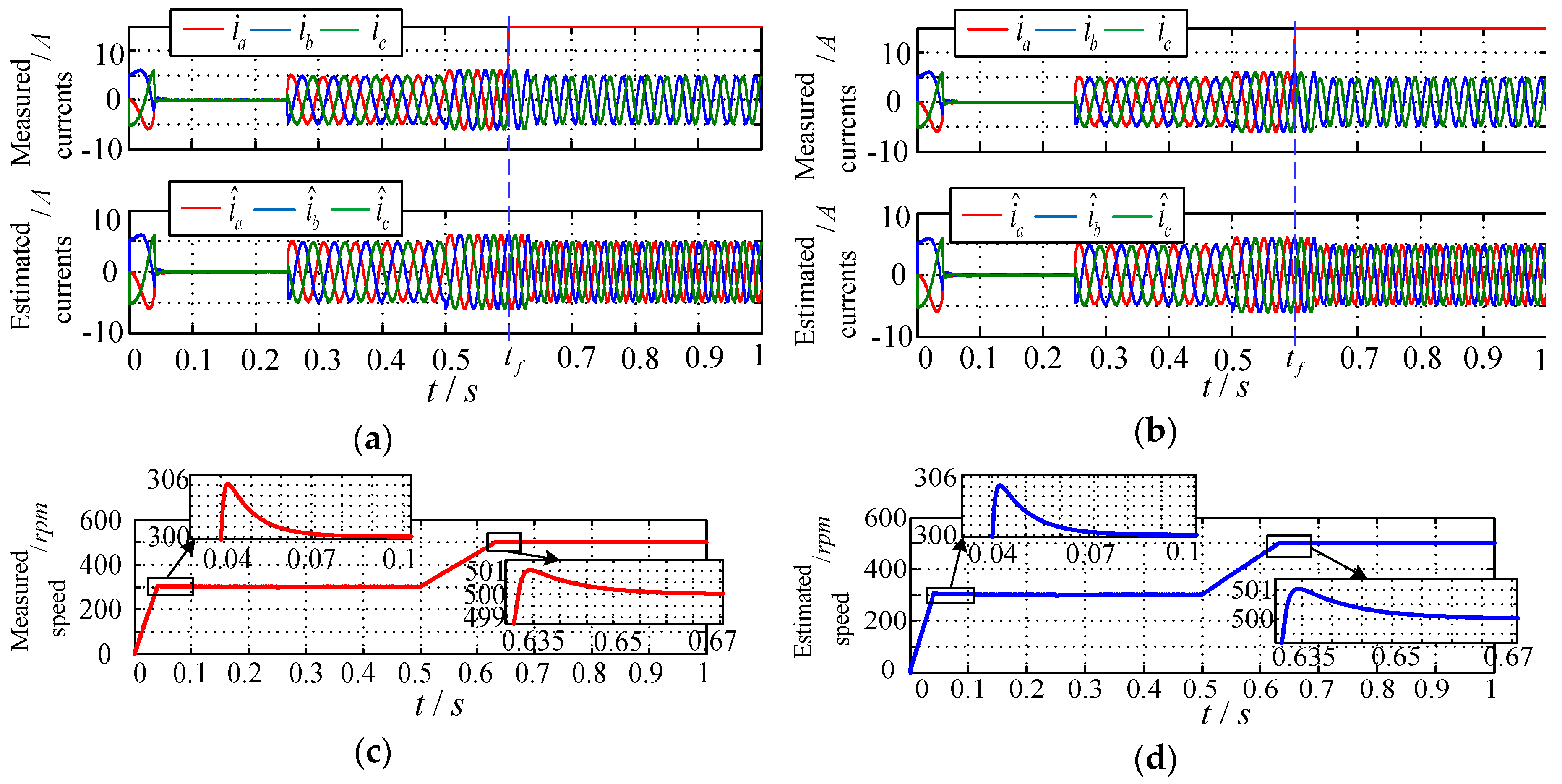
5.3. Simulation III
In this case, the design methods of the Luenberger observer oriented for motor speed sensor and current sensor and the traditional sliding mode observer in [
10,
12] are applied in the PMSM closed-loop control system constructed in this paper. The speed and three-phase current signals are observed and estimated to form a sensor fault diagnosis and fault-tolerant control system with multiple observers. Through simulation, its performance is compared with that of the proposed control system with a single composite sliding mode observer.
In the simulation, it is assumed that the
a-phase current sensor is stuck (
K = 15) and there is a speed sensor constant gain fault (
m = 0.85), and the faults all occur at
tf = 0.6 s. The simulation output waveforms based on multi-observer and single composite observer system for different faults are shown in
Figure 9,
Figure 10 and
Figure 11. The dynamic and steady-state performance indexes of the two types of system are calculated and shown in
Table 2.
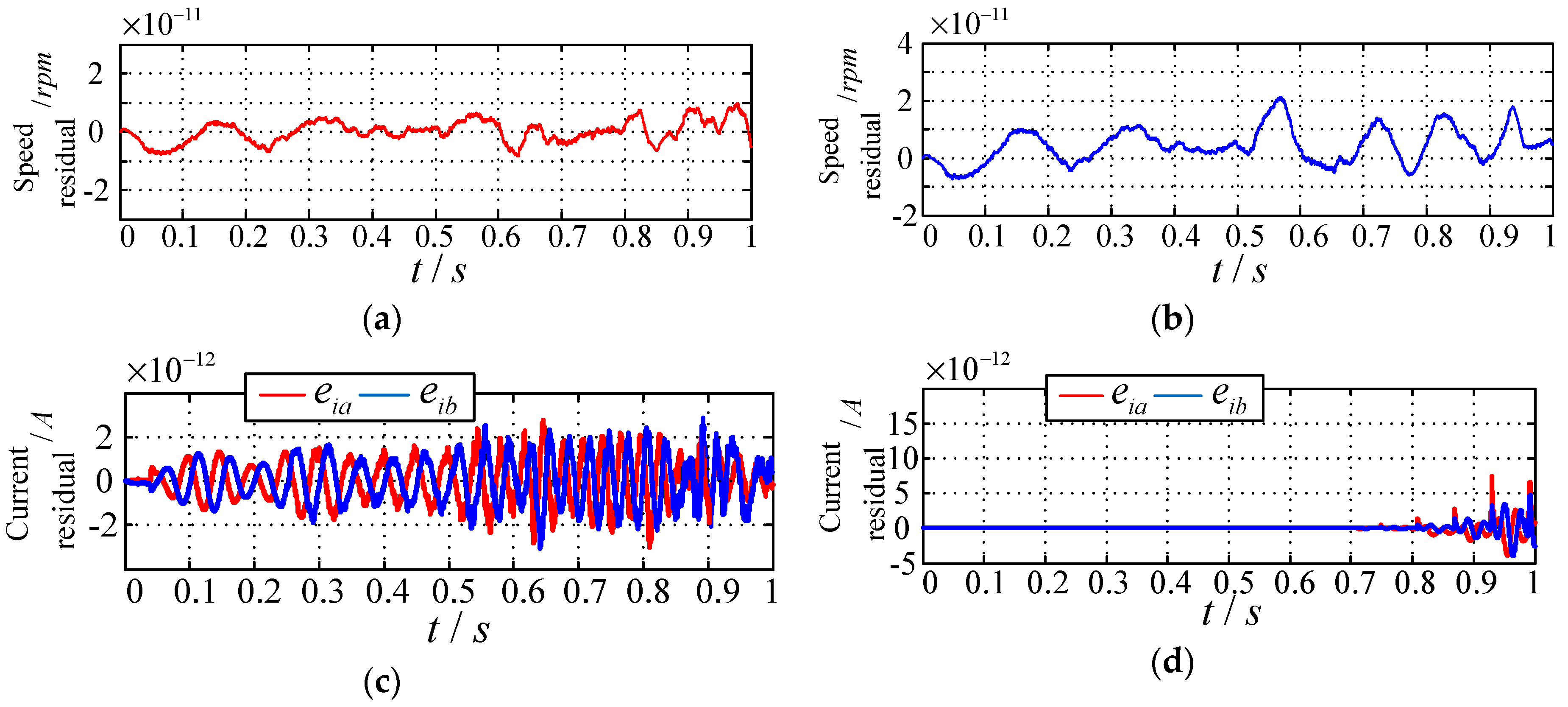
According to the above waveforms and data, it is not difficult to find that from the perspective of control objective, both the composite sliding mode observer control system proposed in this paper and the multi-observer control system based on [
10,
12] can realize diagnosis and fault-tolerant control under current and speed sensor faults, as shown in
Figure 9a,b and
Figure 10a,b. From the perspective of control accuracy, the composite sliding mode observer control system has higher precision and lower probability of misdiagnosis or missed diagnosis, and thus reducing the chattering phenomenon of the system considerably, as shown in
Figure 9c,d,
Figure 10c,d,
Figure 11a and
Figure 10d. From the perspective of control performance, the rise time and adjustment time of the composite sliding mode observer control system is shorter than that of the multi-observer control system, and the fault diagnosis and isolation control are more rapid, which can better meet the actual engineering application requirements. In addition, in the steady-state operation stage, the error between the steady-state response and the expected response is kept in a smaller range, which indicates its better steady-state performance, as shown in
Table 2.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}