Coordinated Frequency and State-of-Charge Control with Multi-Battery Energy Storage Systems and Diesel Generators in an Isolated Microgrid


Abstract
1. Introduction
2. System Configuration and Control Strategy
2.1. Configuration of the Test System
2.2. Control Strategy of the System
3. Proposed Control Strategy of Diesel Generators
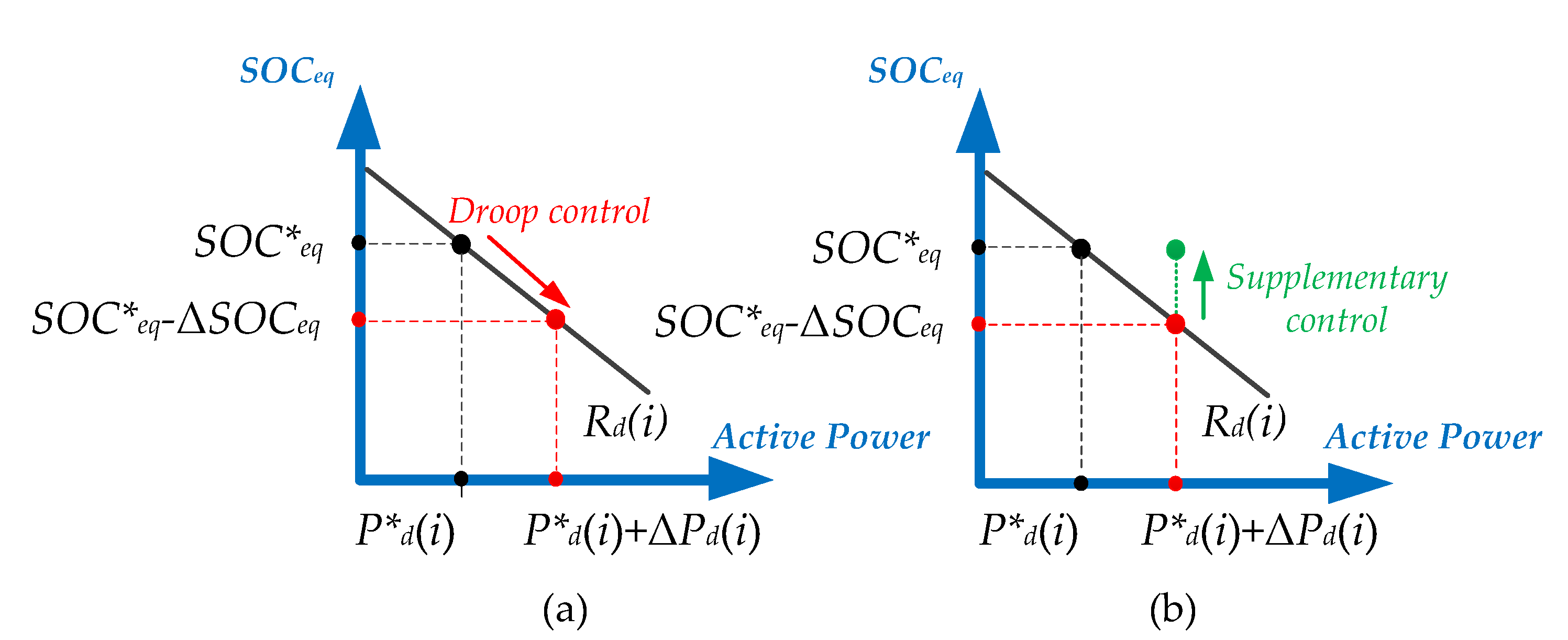
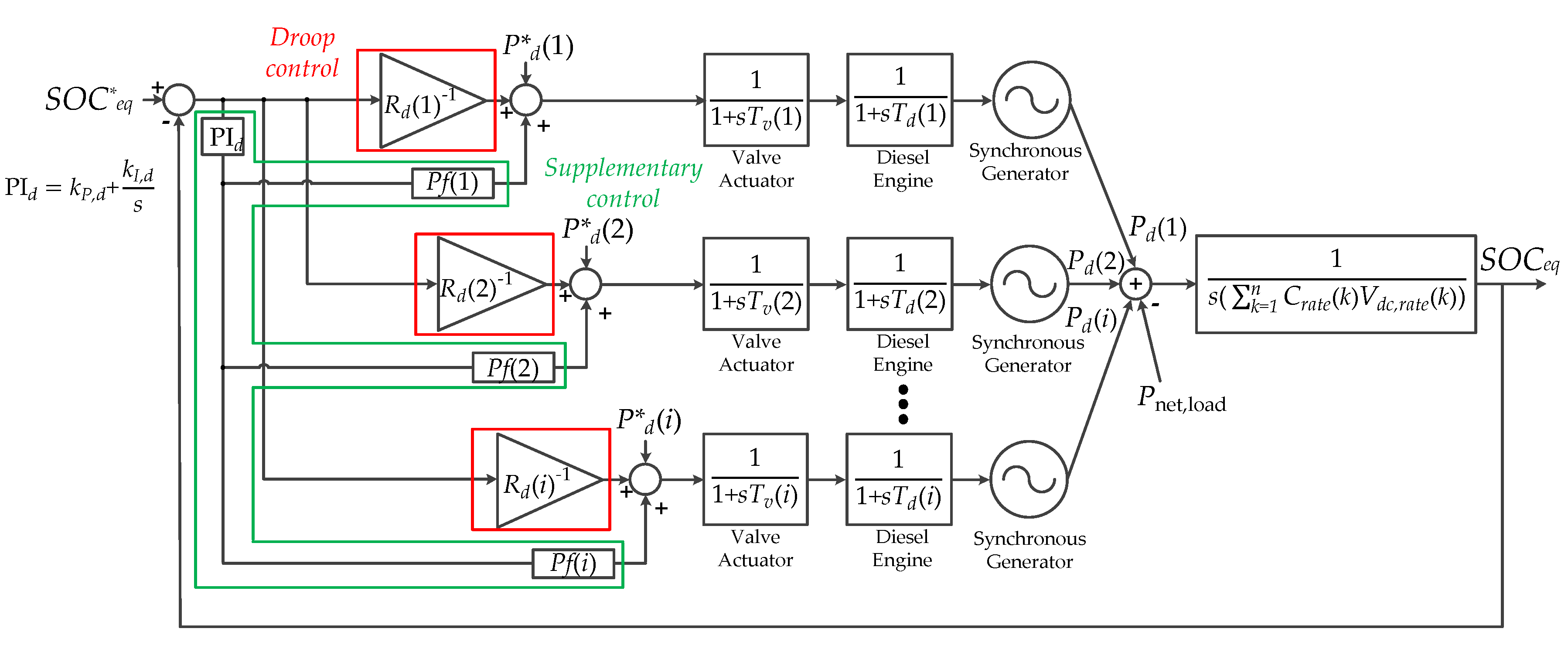
3.1. SOCeq Control Scheme for Single Diesel Generator
3.2. SOCeq Control Scheme for Multiple Diesel Generators
4. Control Strategy of Battery Energy Storage Systems (BESSs)
4.1. Frequency Control Scheme for Multiple BESSs
4.2. Self State of Charge (SOC) Controller for Individual BESSs
4.3. Maintaining Desired Active Power Outputs of BESSs by the Linear Time-Varying SOC Control
5. Case Study
5.1. Case 1: Step Load Change with the Conventional and Proposed Control Method
5.2. Case 2: Step Load Change with and without Self SOC Controller (SSC)
5.3. Case 3: Fluctuation of Renewable Energy Sources (RESs) with the Conventional and Proposed Control Method
5.4. Case 4: Consideration of Communication Delays
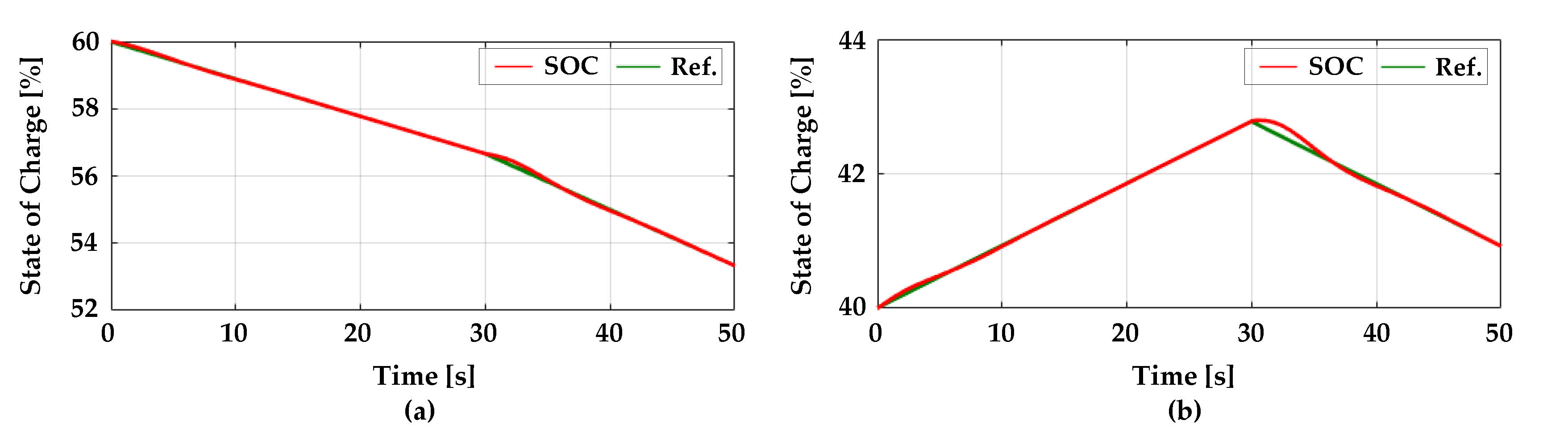
5.5. Case 5: Regulating Active Power of BESSs by the Linear Time-Varying Control of SOCs
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pashajavid, E.; Ghosh, A. Frequency support for remote microgrid systems with intermittent distributed energy resources—A two-level hierarchical strategy. IEEE Syst. J. 2014, 12, 2760–2771. [Google Scholar] [CrossRef]
- Mohamed, S.; Shaaban, M.F.; Ismail, M.; Serpedin, E.; Qaraqe, K. An efficient planning algorithm for hybrid remote microgrids. IEEE Trans. Sustain. Energy 2018, 10, 257–267. [Google Scholar] [CrossRef]
- Etxegarai, A.; Equia, P.; Torres, E.; Iturregi, A.; Valverde, V. Review of grid connection requirements for generation assets in weak power grids. Renew. Sustain. Energy Rev. 2015, 41, 1501–1514. [Google Scholar] [CrossRef]
- Kim, Y.S.; Hwang, C.S.; Kim, E.S.; Cho, C. State of charge based active power sharing method in a standalone microgrid with high penetration level of renewable energy sources. Energies 2016, 9, 480. [Google Scholar] [CrossRef]
- Liu, Y.; Du, W.; Xiao, L.; Wang, H.; Cao, J. A method for sizing energy storage system to increase wind penetration as limited by grid frequency deviations. IEEE Trans. Power Syst. 2016, 31, 729–737. [Google Scholar] [CrossRef]
- Diaz, N.L.; Luna, A.C.; Vasquez, J.C.; Guerrero, J.M. Centralized control architecture for coordination of distributed renewable generation and energy storage in islanded ac microgrids. IEEE Trans. Power Electron. 2017, 32, 5202–5213. [Google Scholar] [CrossRef]
- Kim, Y.S.; Kim, E.S.; Moon, S.I. Frequency and voltage control strategy of standalone microgrids with high penetration of intermittent renewable generation systems. IEEE Trans. Power Syst. 2016, 31, 718–728. [Google Scholar] [CrossRef]
- Delille, G.D.; Francois, B.; Malarange, G. Dynamic frequency control support by energy storage to reduce the impact of wind and solar generation on isolated power system’s inertia. IEEE Trans. Sustain. Energy 2012, 3, 931–939. [Google Scholar] [CrossRef]
- Jiang, Q.; Hong, H. Wavelet-based capacity configuration and coordinated control of hybrid energy storage system for smoothing out wind power fluctuations. IEEE Trans. Power Syst. 2013, 28, 1363–1372. [Google Scholar] [CrossRef]
- Xiao, J.; Bai, L.; Li, F.; Liang, H.; Wang, C. Sizing of energy storage and diesel generators in an isolated microgrid using discrete fourier transform (DFT). IEEE Trans. Sustain. Energy 2014, 5, 907–916. [Google Scholar] [CrossRef]
- Singh, B.; Solanki, J. Compensation for diesel generator-based isolated generation system employing DSTATCOM. IEEE Trans. Ind. Appl. 2011, 5, 907–916. [Google Scholar] [CrossRef]
- Moon, H.J.; Kim, Y.J.; Chang, J.W.; Moon, S.I. Decentralised active power control strategy for real-time power balance in an isolated microgrid with an energy storage system and diesel generators. Energies 2019, 12, 511. [Google Scholar] [CrossRef]
- Gao, L.; Liu, S.; Dougal, R.A. Dynamic lithium-ion battery model for system simulation. IEEE Trans. Compon. Packag. Technol. 2002, 25, 495–505. [Google Scholar]
- Rocabert, J.R.; Luna, A.L.; Blaabjerg, F.; Rodriquez, P. Control of power converters in ac microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Ogata, K. Modern Control Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 2009. [Google Scholar]
- Yazdami, A.; Iravani, R. Voltage-Sourced Converters in Power System; Willy Press: Hoboken, NY, USA, 2010. [Google Scholar]
- Kim, Y.S.; Kim, E.S.; Moon, S.I. Distributed generation control method for active power sharing and self-frequency recovery in an islanded microgrid. IEEE Trans. Power Syst. 2017, 32, 544–551. [Google Scholar] [CrossRef]
- Kosari, M.; Hosseinian, S.H. Decentralized reactive power sharing and frequency restoration in islanded microgrid. IEEE Trans. Power Syst. 2017, 32, 2901–2912. [Google Scholar] [CrossRef]
- IEEE. IEEE Recommended Practice for Protection and Coordination of Industrial and Commercial Power Systems; IEEE: Piscataway, NJ, USA, 1986. [Google Scholar]
- Bergen, A.R. Power System Analysis; Prentice-Hall: Englewood Cliffs, NJ, USA, 1986. [Google Scholar]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons: Chichester, UK, 2011. [Google Scholar]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electr. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Paquette, A.D.; Reno, M.J.; Harley, R.G.; Divan, D.M. Sharing transient loads: Causes of unequal transient load sharing in islanded microgrid operation. IEEE Ind. Appl. Mag. 2014, 20, 22–34. [Google Scholar] [CrossRef]
- Badin, F.; Le Berr, F.; Briki, H.; Dabadie, J.-C.; Petit, M.; Magand, S.; Condemine, E. Evaluation of EVs energy consumption influencing factors, driving conditions, auxiliaries use, driver’s aggressiveness. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–12. [Google Scholar]
- Ng, K.S.; Moo, C.S.; Chen, Y.P.; Hsieh, Y.C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Delille, G.; Francois, B.; Malarange, G. Dynamic frequency control support: A virtual inertia provided by distributed energy storage to isolated power systems. In Proceedings of the IEEE Innovative Smart Grid Technologies Europe Conference (ISGT), Gothenburg, Sweden, 11–13 October 2010. [Google Scholar]
- Wang, Y.; Delille, G.; Guillaud, X.; Colas, F.; Francois, B. Real-time simulation: The missing link in the design process of advanced grid equipment. In Proceedings of the IEEE PES General Meeting, Minneapolis, MN, USA, 25–29 July 2010. [Google Scholar]
- Pan, C.T.; Liao, Y.H. Modeling and coordinate control of circulating currents in parallel three-phase boost rectifiers. IEEE Trans. Ind. Appl. 2007, 54, 825–838. [Google Scholar] [CrossRef]
- Xie, X.; Xin, Y.; Xiao, J.; Wu, J.; Han, Y. WAMS application in Chinese power system. IEEE Power Energy Mag. 2006, 4, 54–63. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Method | Parallel Operation of Diesel Generators | Parallel Operation of BESSs | Frequency Control | SOC Control |
|---|---|---|---|---|
| Conventional CSF | X | X | O | △ (Single) |
| Proposed CSF | O | O | O | O (Multiple) |
| Control Method | Type | Parameter | Symbol | Value |
|---|---|---|---|---|
| Conventional Method | Diesel Generators | Droop gain | Rd(1), Rd(2), Rd(3) | 4.8/150 Hz/kW |
| PI gain for suppl. control | kP,sup(1) + kI,sup(1)/s, kP,sup(2) + kI,sup(2)/s | 60,000 + 45,000/s | ||
| Participation factor | Pf(1), Pf(2), Pf(3) | 1/3 | ||
| BESSs | Droop gain | Rb(1), Rb(2) | 0.6/250, 0.4/150 Hz/kW | |
| Proposed Method | Diesel Generators | Droop gain | Rd(1), Rd(2), Rd(3) | 5/150%/kW |
| PI gain for suppl. control | kP,d + kI,d/s, | 30,000 + 22,500/s | ||
| Participation factor | Pf(1), Pf(2), Pf(3) | 1/3 | ||
| BESSs | Droop gain | Rb(1), Rb(2) | 0.6/250, 0.4/150 Hz/kW | |
| PI gain for suppl. control | kP,s(1) + kI,s(1)/s, kP,s(2) + kI,s(2)/s | 0 + 500/s, 0 + 100/s | ||
| PI gain for self SOC control | kP,SSC(1) + kI,SSC(1)/s, kP,SSC(2) + kI,SSC(2)/s | 20 + 5/s | ||
| SOC reference value | SOCref(1), SOCref(2) | 60%, 40% |
| Type | Parameter | Symbol | Value |
|---|---|---|---|
| Diesel Generators | Valve-actuator time constant | Tv(1), Tv(2), Tv(3) | 0.05 s |
| Diesel-engine time constant | Td(1), Td(2), Td(3) | 0.5 s | |
| BESSs | Filter components | Lf(1), Lf(2), Cf(1), Cf(2) | 0.14 mH, 0.25 mH 4.8 mF, 3.4 mF |
| Voltage-control PI gain | kP,v(1)+ kI,v(1)/s, kP,v(2)+ kI,v(2)/s | 3 + 500/s, 3 + 1000/s | |
| Current-control PI gain | kP,c(1) + kI,c(1)/s, kP,c(2)+ kI,c(2)/s | 32 + 300/s, 35 + 200/s | |
| Rated battery capacity | Crate(1), Crate(2) | 5000/710, 3000/650 Ah | |
| Nominal battery voltage | Vdc,rate(1), Vdc,rate(2) | 710, 650 V | |
| Initial SOC | SOC0(1), SOC0(2) | 60%, 40% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, J.-W.; Lee, G.-S.; Moon, H.-J.; Glick, M.B.; Moon, S.-I. Coordinated Frequency and State-of-Charge Control with Multi-Battery Energy Storage Systems and Diesel Generators in an Isolated Microgrid. Energies 2019, 12, 1614. https://doi.org/10.3390/en12091614
Chang J-W, Lee G-S, Moon H-J, Glick MB, Moon S-I. Coordinated Frequency and State-of-Charge Control with Multi-Battery Energy Storage Systems and Diesel Generators in an Isolated Microgrid. Energies. 2019; 12(9):1614. https://doi.org/10.3390/en12091614
Chicago/Turabian StyleChang, Jae-Won, Gyu-Sub Lee, Hyeon-Jin Moon, Mark B. Glick, and Seung-Il Moon. 2019. "Coordinated Frequency and State-of-Charge Control with Multi-Battery Energy Storage Systems and Diesel Generators in an Isolated Microgrid" Energies 12, no. 9: 1614. https://doi.org/10.3390/en12091614
APA StyleChang, J.-W., Lee, G.-S., Moon, H.-J., Glick, M. B., & Moon, S.-I. (2019). Coordinated Frequency and State-of-Charge Control with Multi-Battery Energy Storage Systems and Diesel Generators in an Isolated Microgrid. Energies, 12(9), 1614. https://doi.org/10.3390/en12091614