An Embedded Sensor Node for the Surveillance of Power Quality


 and
and
Abstract
:1. Introduction
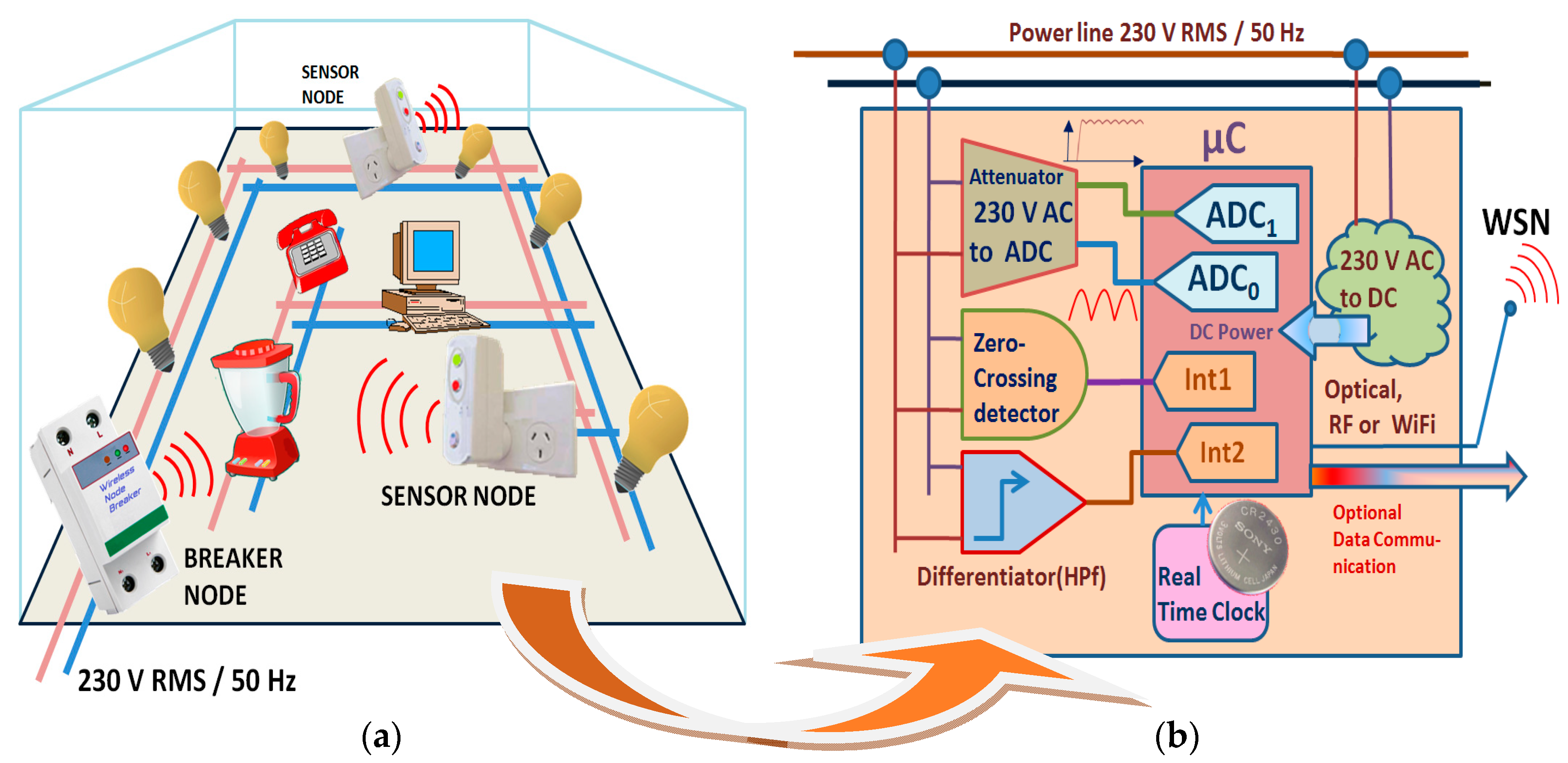
2. Sensor Node Architecture
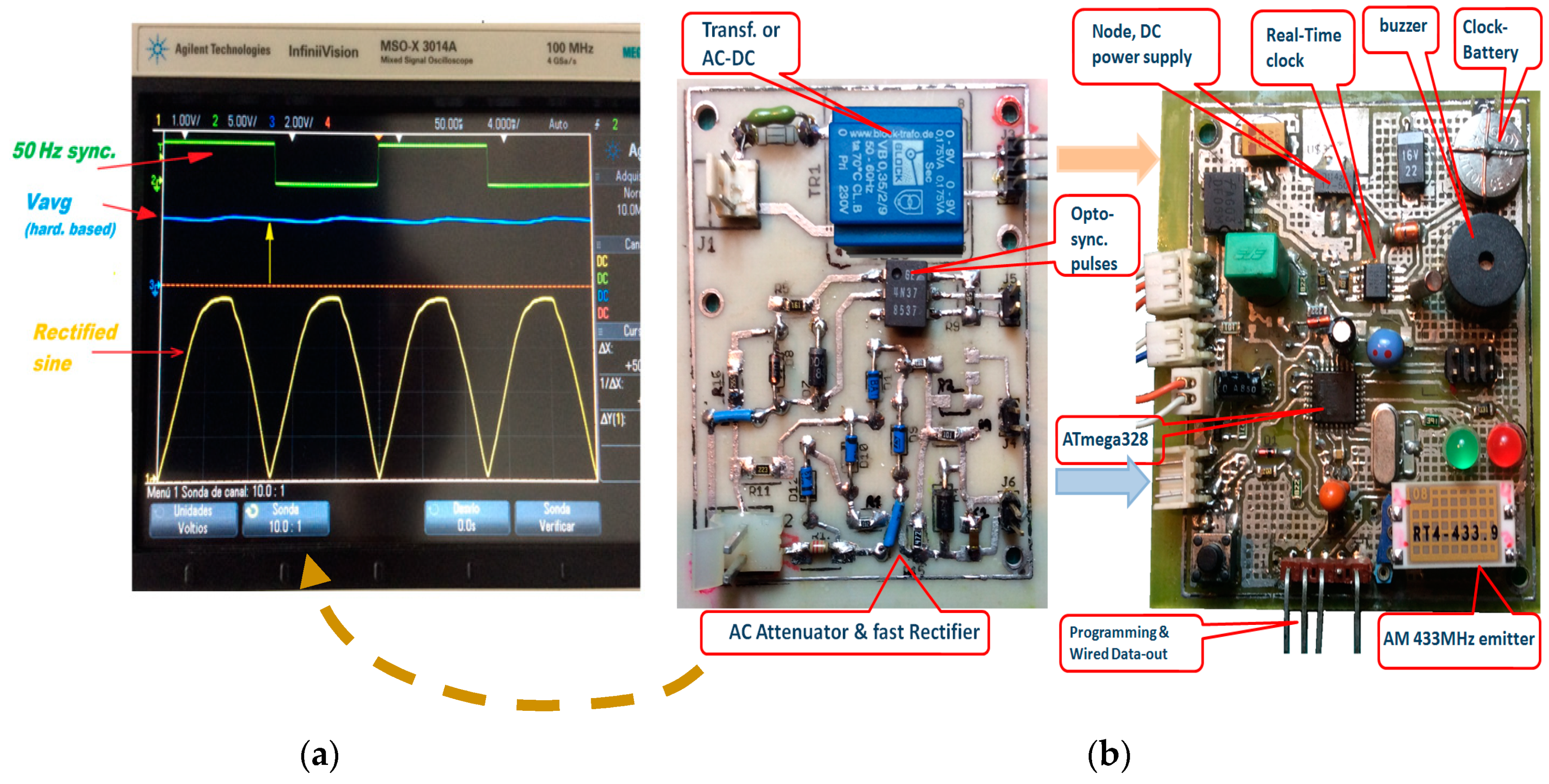
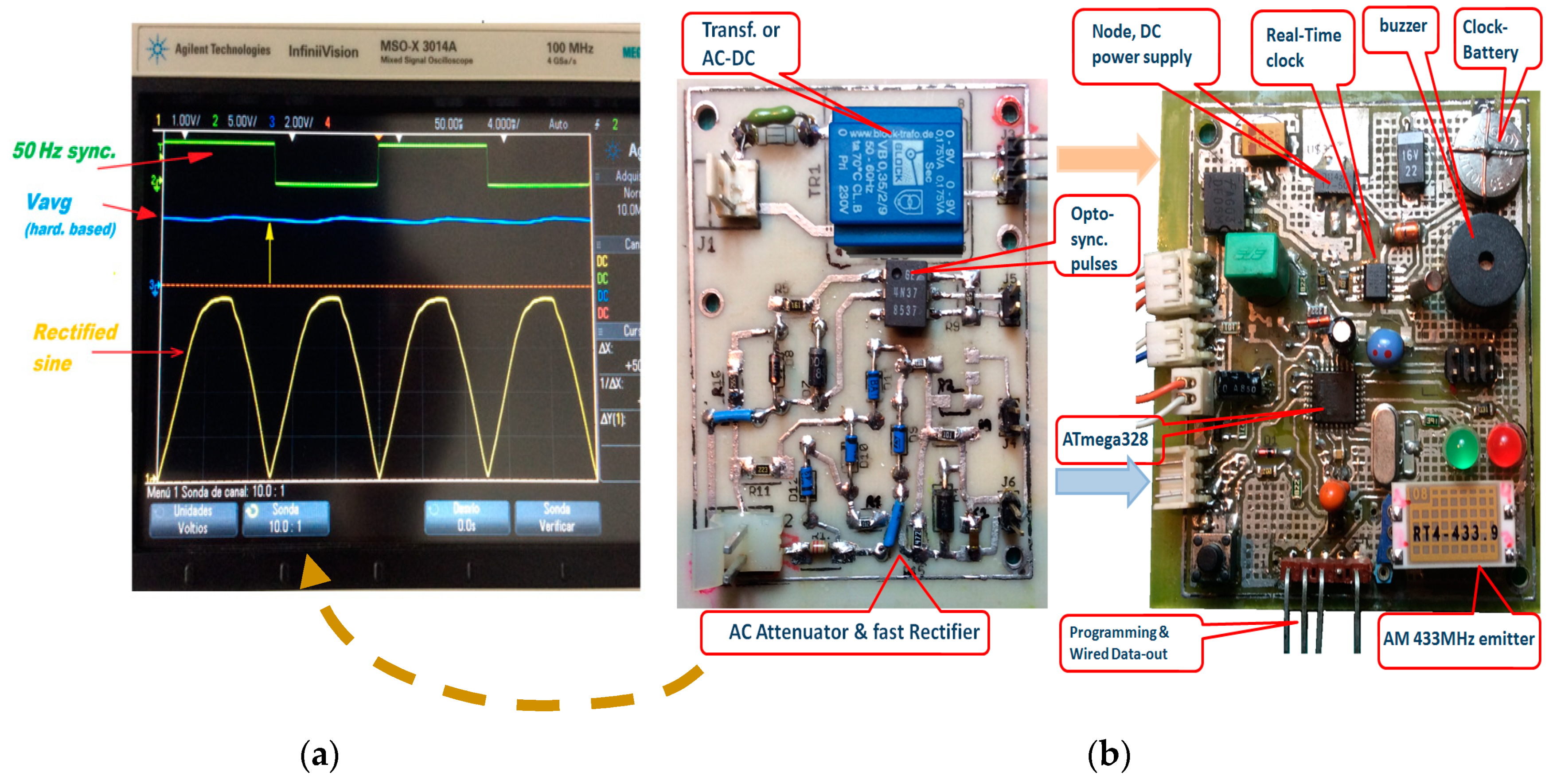
2.1. Acquiring and Conditioning of Electrical Parameters
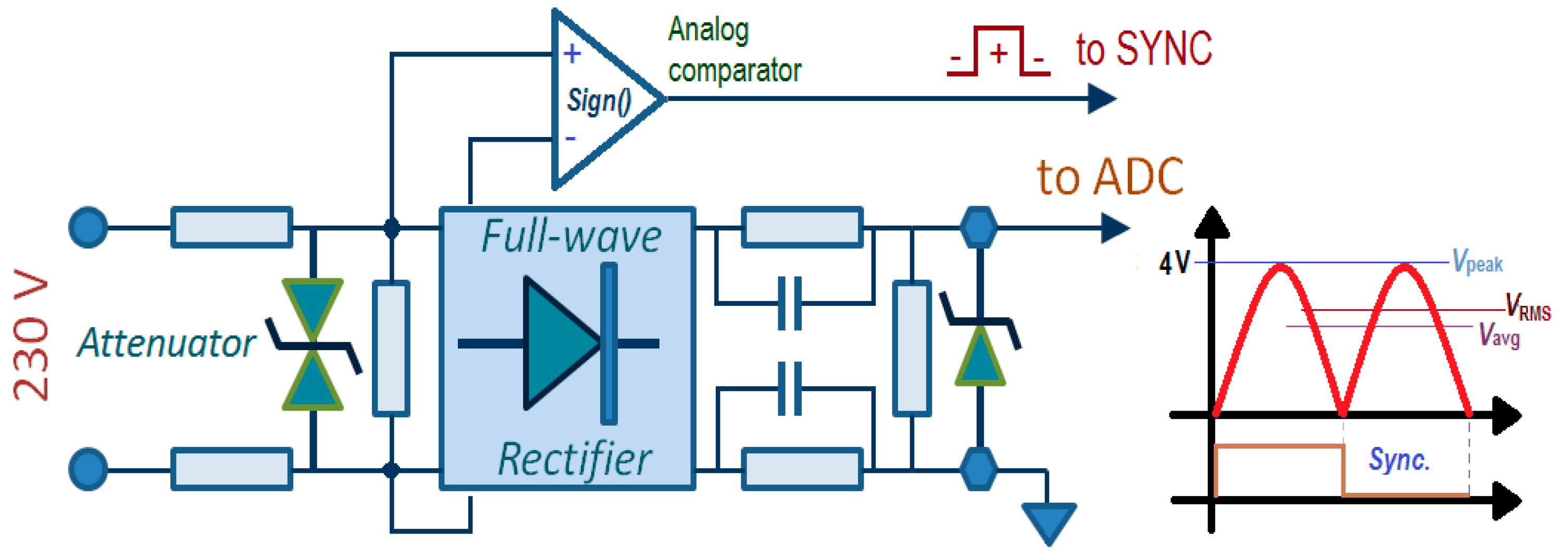
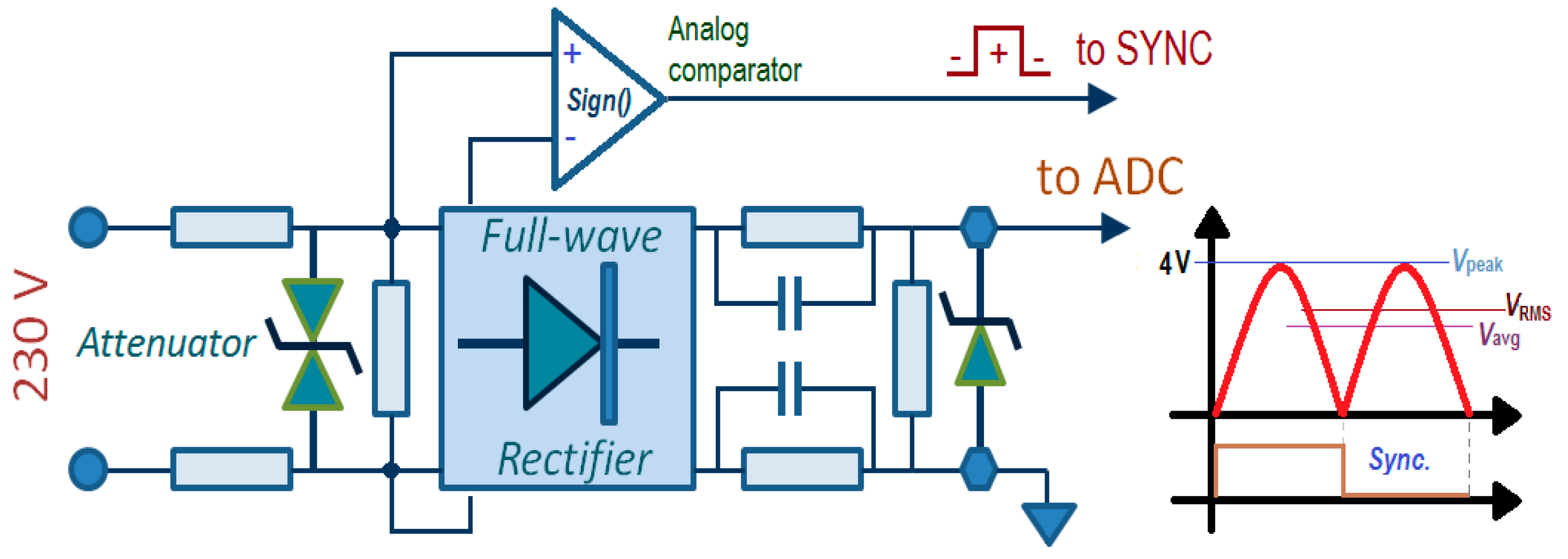
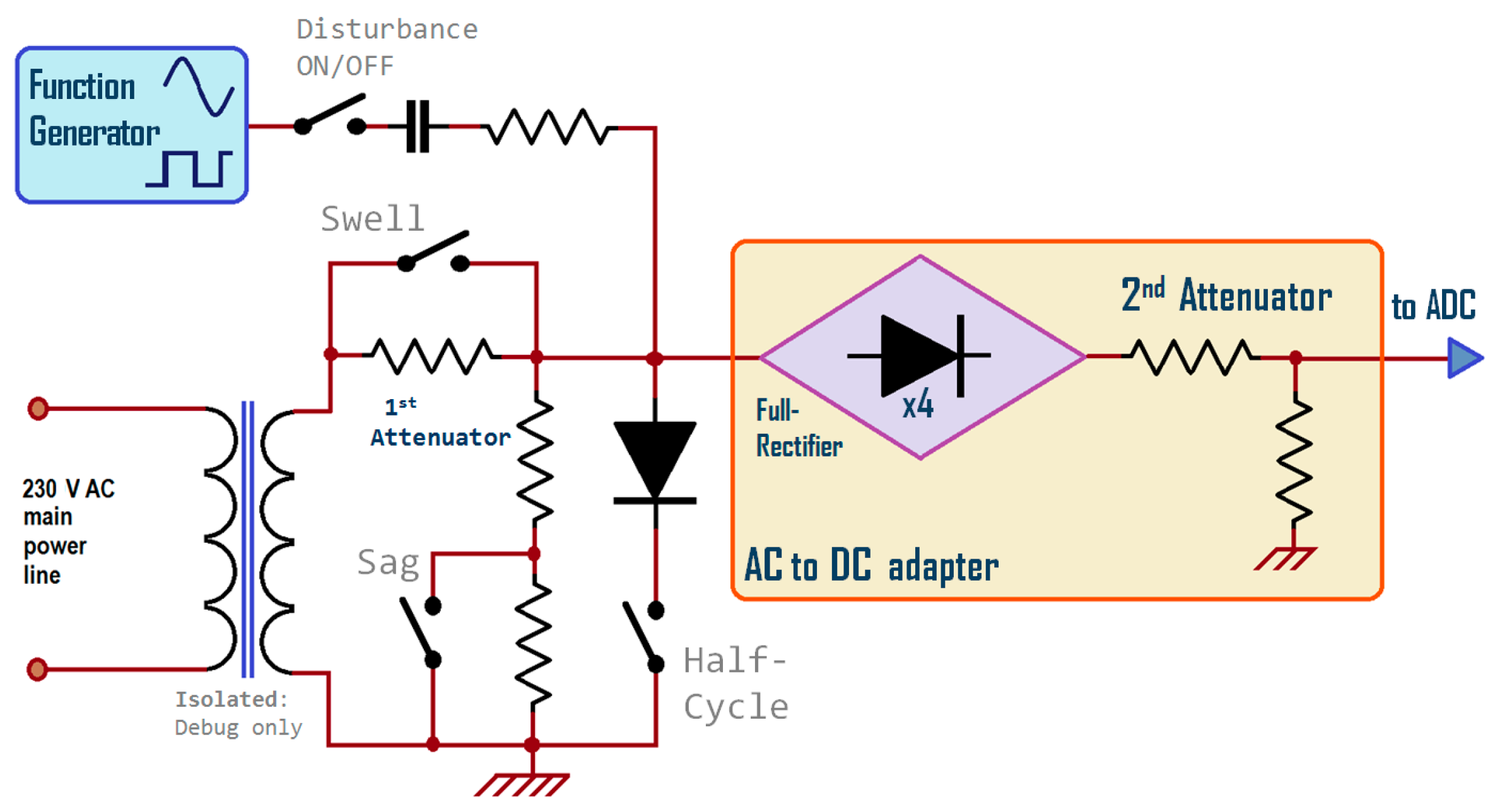
2.1.1. Alternating Current (AC) Power Line Adapter
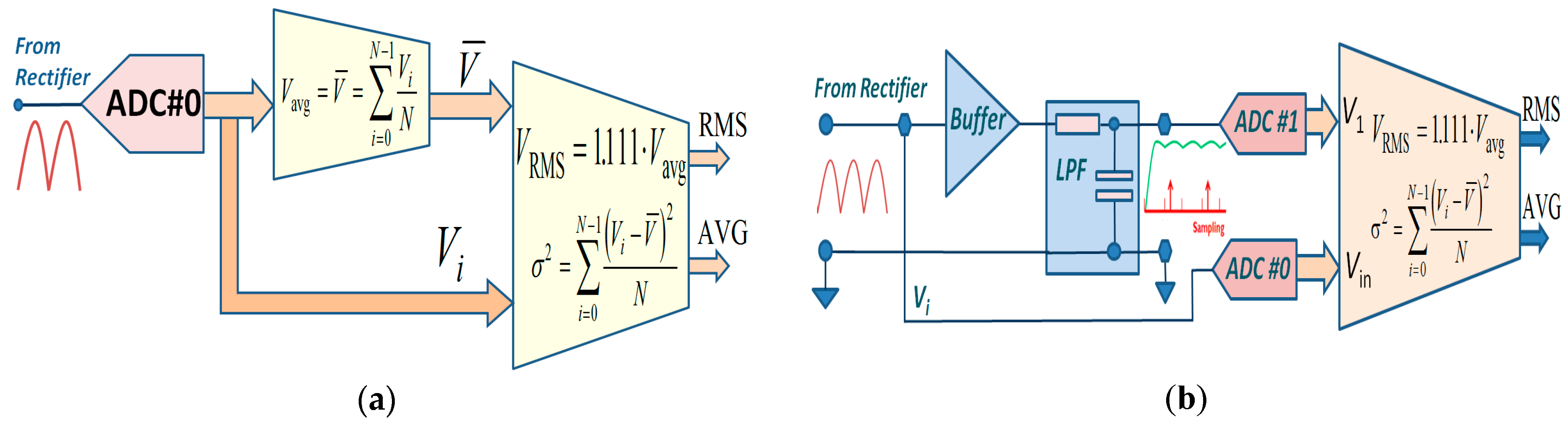
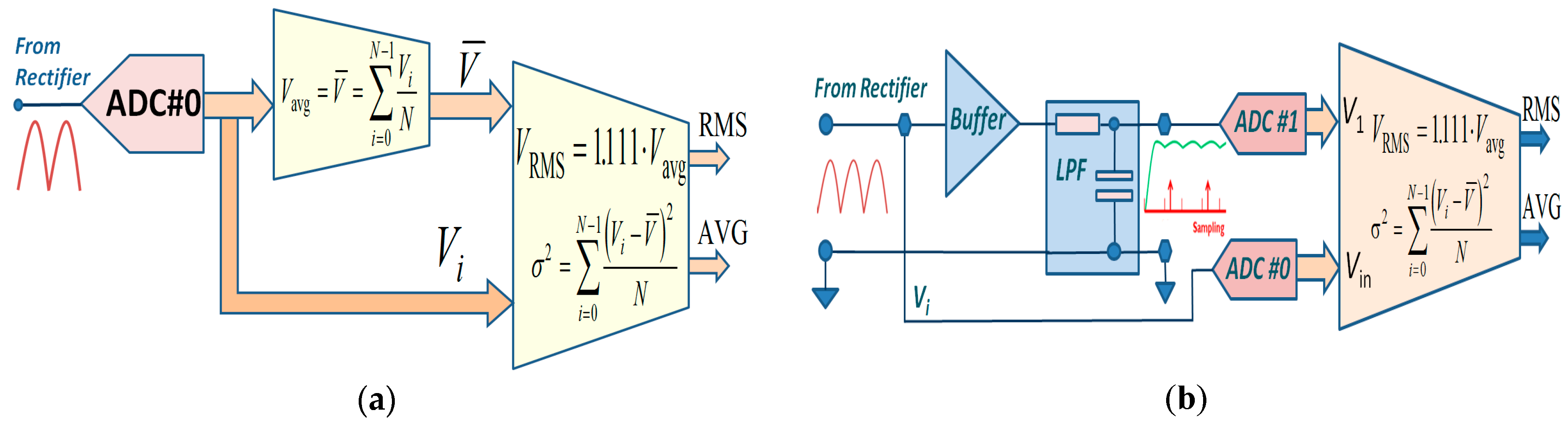
2.1.2. Average Voltage Measurement
2.2. Signal Processing Techniques
2.2.1. Statistical Processing Techniques
2.2.2. Detection Algorithm Using Kalman Filter
2.2.3. Detection Algorithm Using the Helmholtz Equation
2.2.4. Detection Algorithm by Contrasting with Successive Previous Integrations
3. Hardware Platform
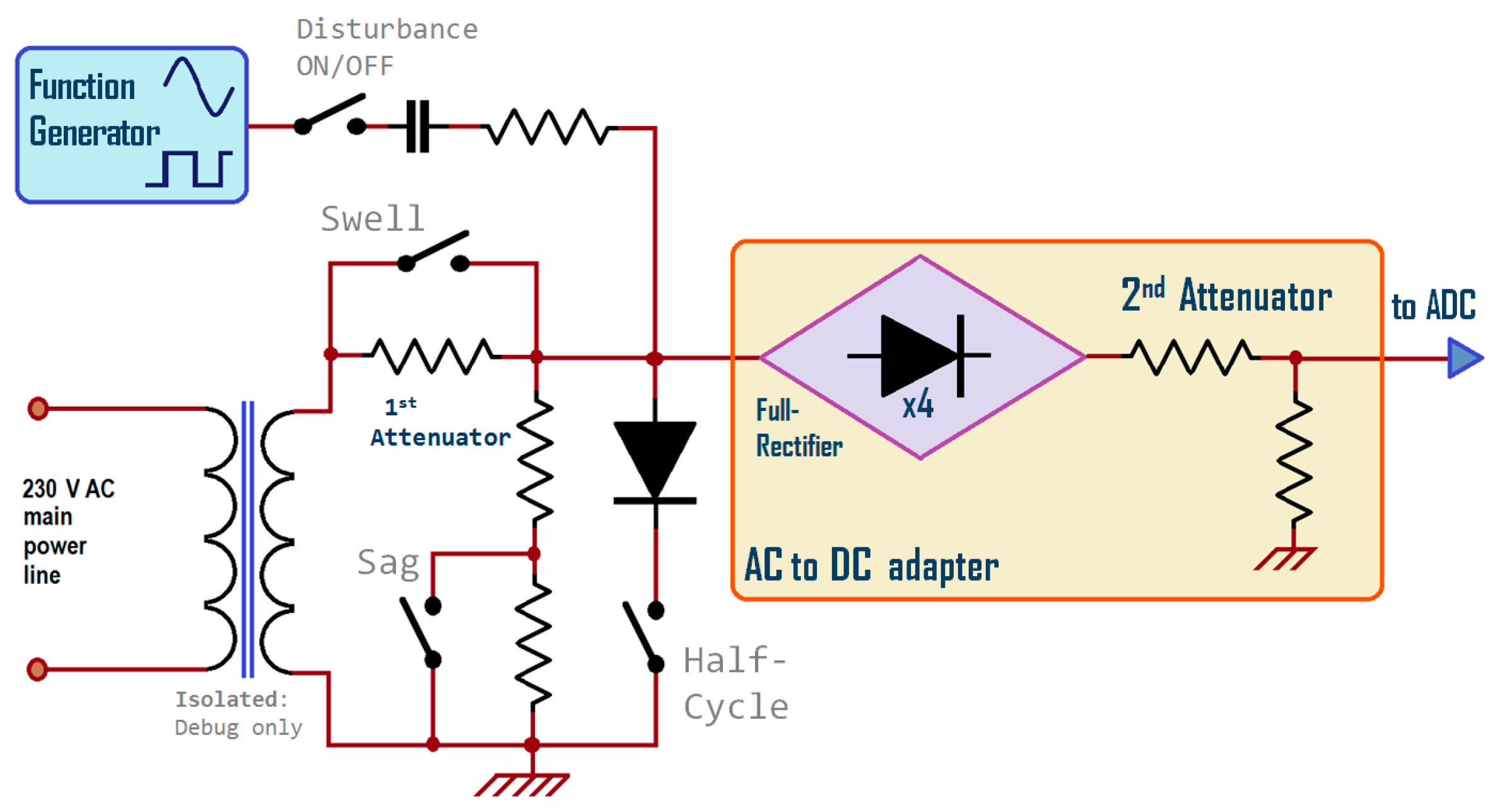
3.1. Measurement Setup
3.1.1. Dynamic Range
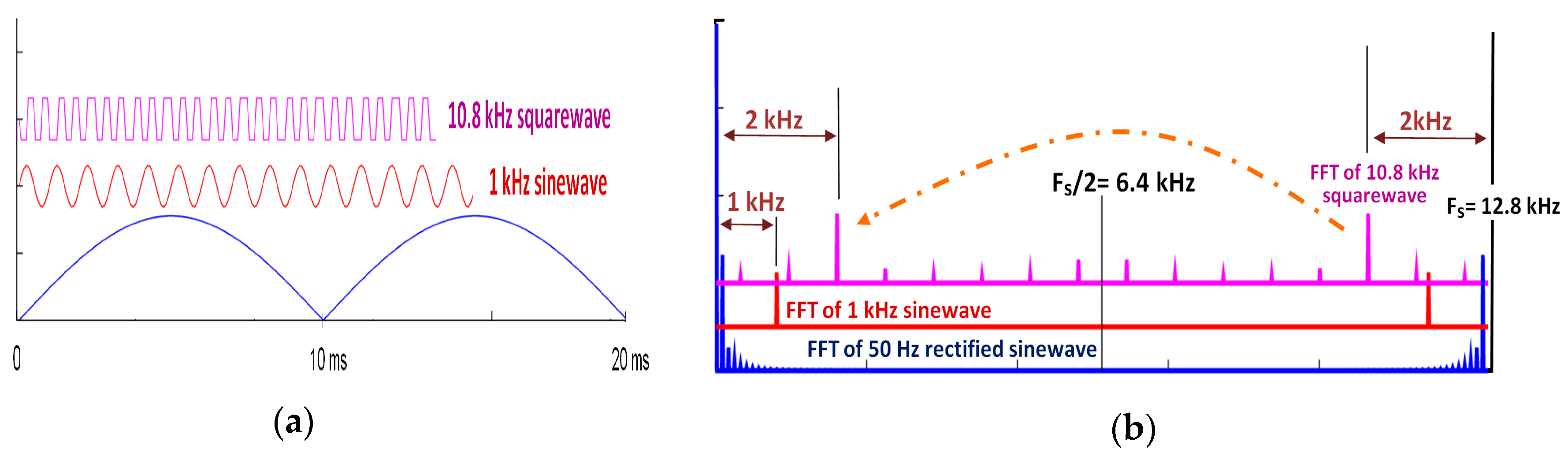
3.1.2. Synchronous Conversion and Sampling Rate
3.1.3. The Absence of the Anti-Aliasing Filter
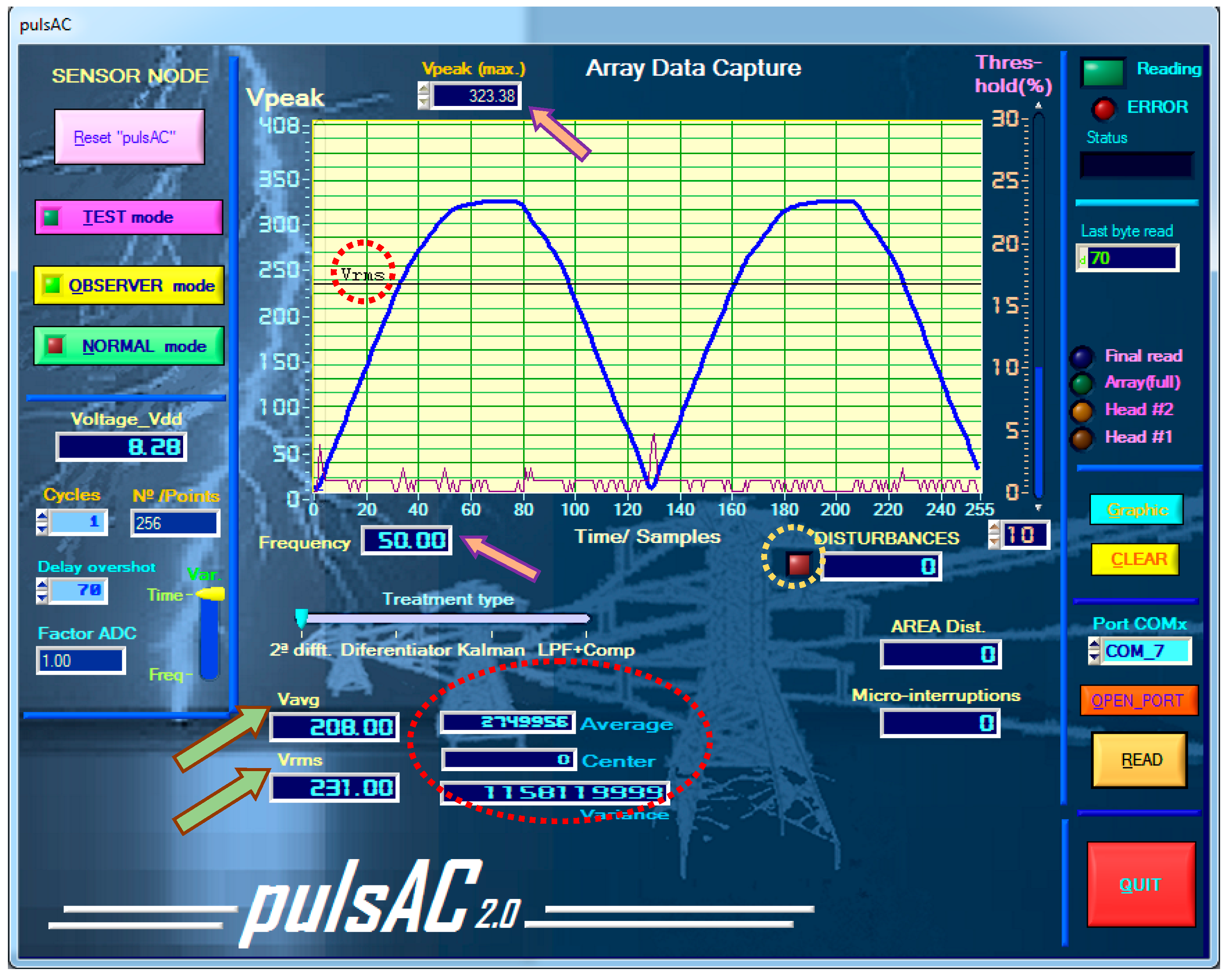
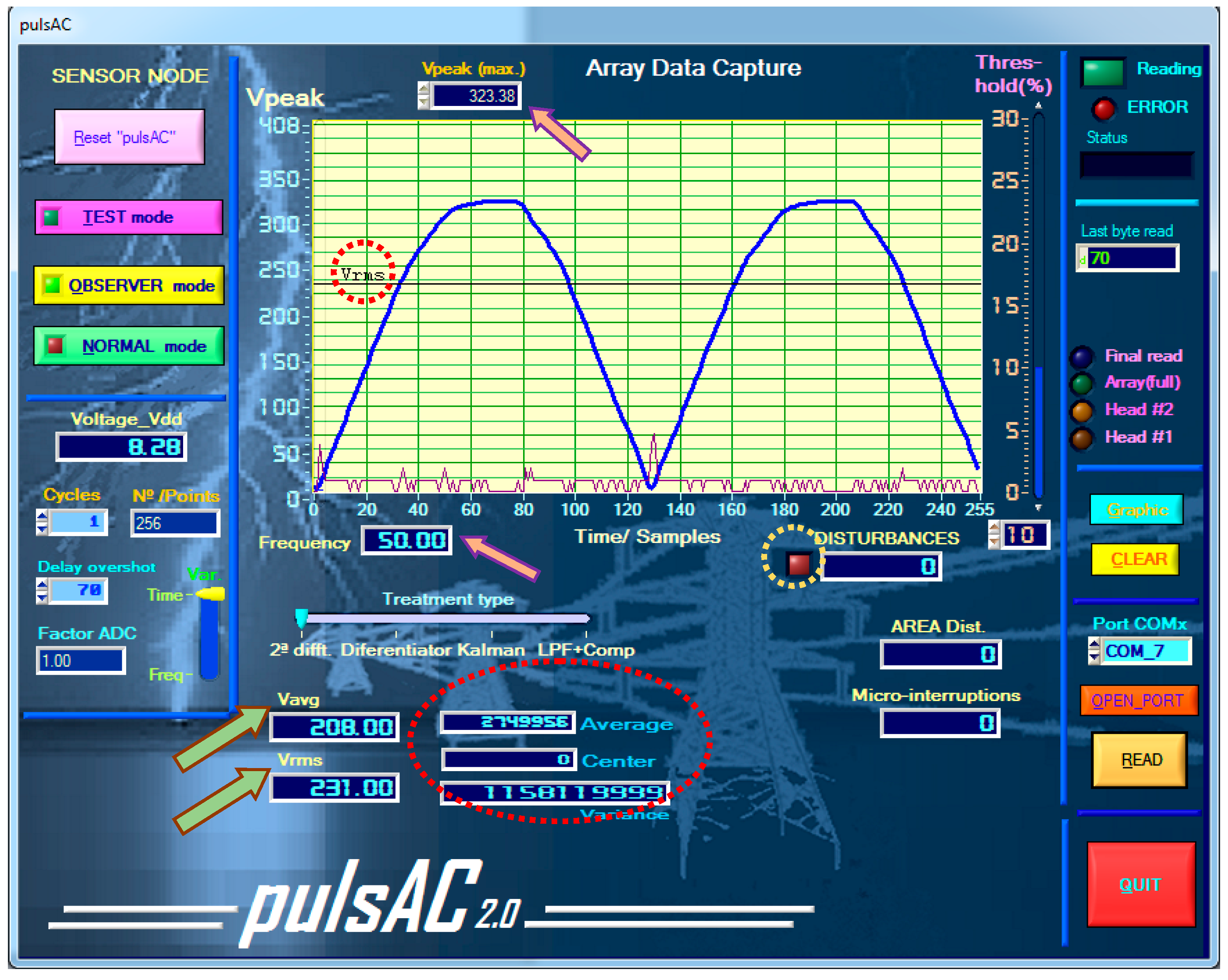
3.1.4. Application Software for Essays of Algorithms and Test-Bench
3.1.5. Data Acquisition State Machine
3.2. Algorithms’ Implementation Codes
3.2.1. Detection Algorithm Based on the Helmholtz Equation

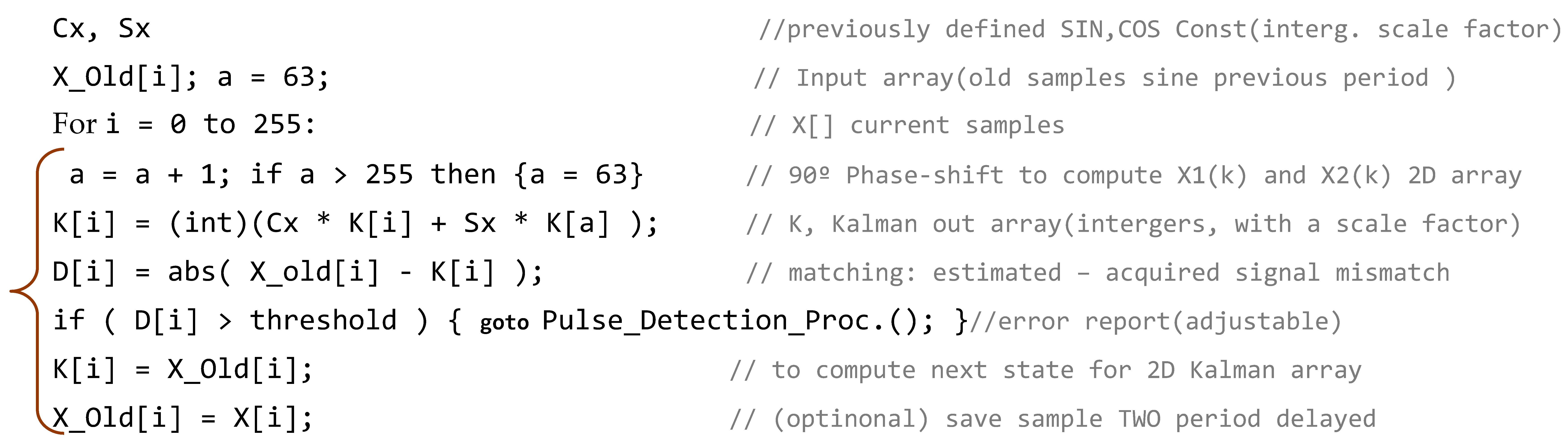
3.2.2. Kalman Filter Implementation
3.2.3. Detection Algorithm by Contrasting with Successive Previous Integrations

4. Results
- VRMS decreased by approximately half of the nominal 230 V AC (−54.7%) (0.6 p.u. momentary sag).
- Half-cycle missing or a sag in an amount bigger than 10% (instantaneous sag, 0.5 cycles > 0.1 p.u.).
- Swelled peak voltage at 13.35% over the 311 V nominal peak (1.13 p.u. momentary swell).
- Permanent or intermittent disturbance signals, as sine or square waves, with different amplitude levels and frequencies, from the function generator.
- To emulate impulsive transients of different duration, square pulses of low, medium and high frequency (10 Hz, 1 kHz, 10 kHz and 100 kHz) and amplitude up to 10% of Vpeak (corresponding to 0.1 p.u., with respect to the rectified voltage and using a voltage divider) were injected. To emulate harmonic distortion a 200 Hz sine low-amplitude component can also be superimposed. Different sinusoidal functions (10 Hz to 10 kHz), approximately 10% (0.1 p.u.) amplitude with respect to the rectified voltage peak value were used for oscillations simulation.
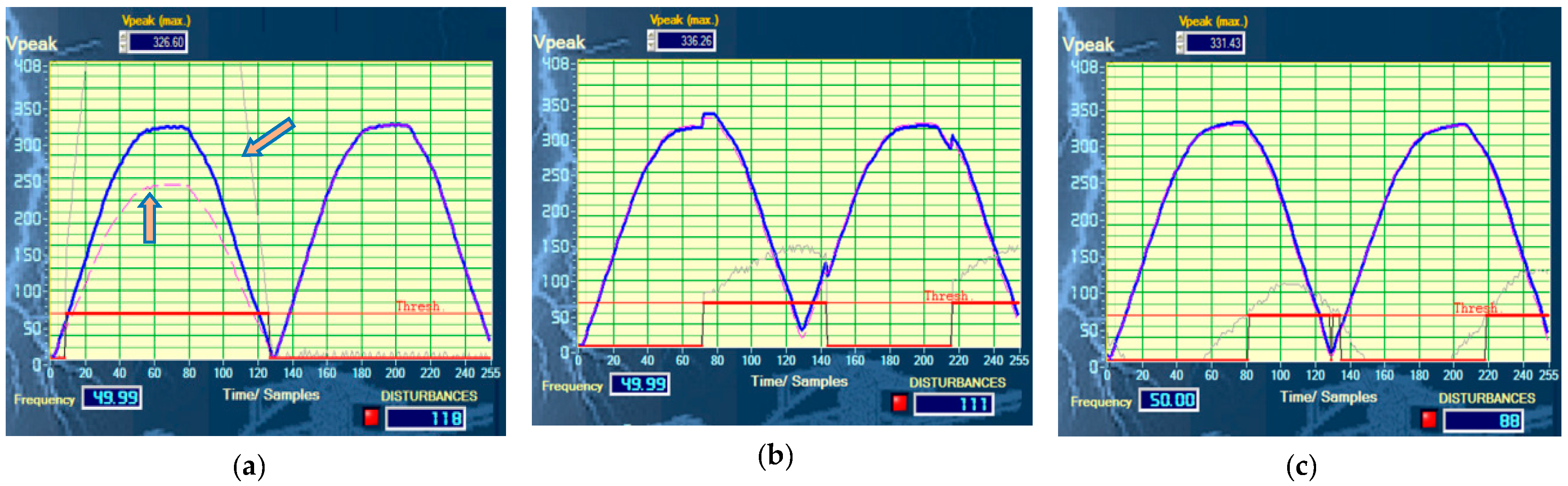
4.1. Helmholtz-Based Method
- Voltage fluctuations testing: the slow voltage variation generates small differences values in the derivative algorithm given by Equation (13). This method is insensitive for phenomena such as sag or swell voltage.
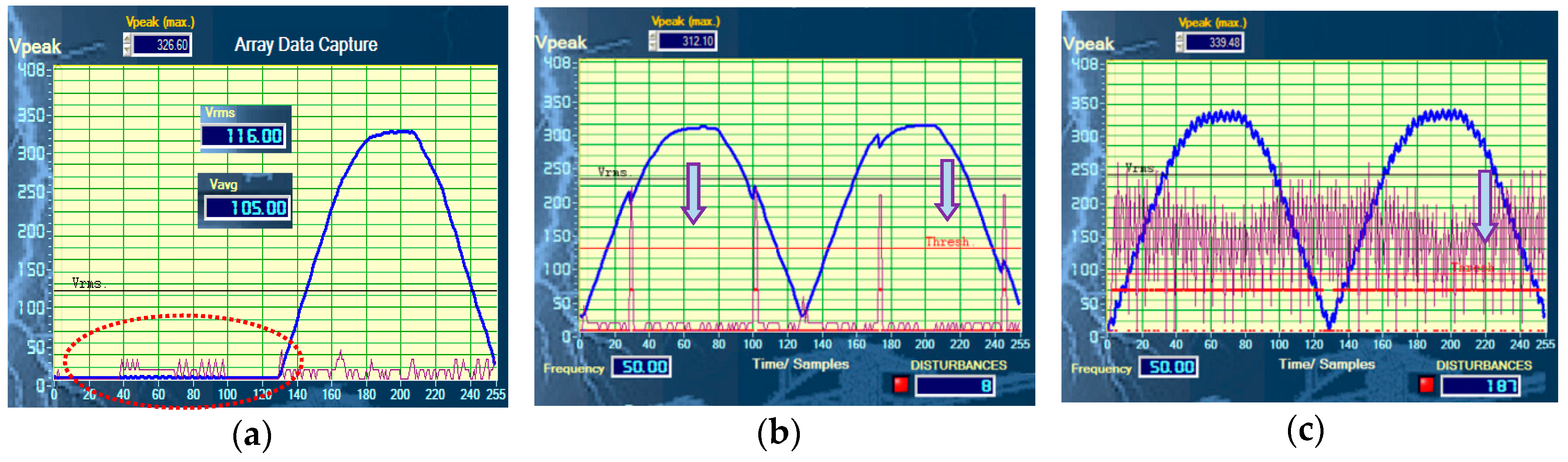
- The process is not sensitive to brief changes such as micro-interruption or sudden half-cycle missing failures (Figure 9a) because the algorithm requires a full period to compute completely the array of the sampled input voltage.
- When a square voltage (1 kHz or 100 Hz) is superimposed (Figure 9b) the algorithm presents a good detection response (relative threshold = 5% adjustable from 0 up to 30%). It also works correctly for high frequencies (10 kHz and 100 kHz, even greater than FS (Section 4.4)
4.2. Kalman Filter Detection
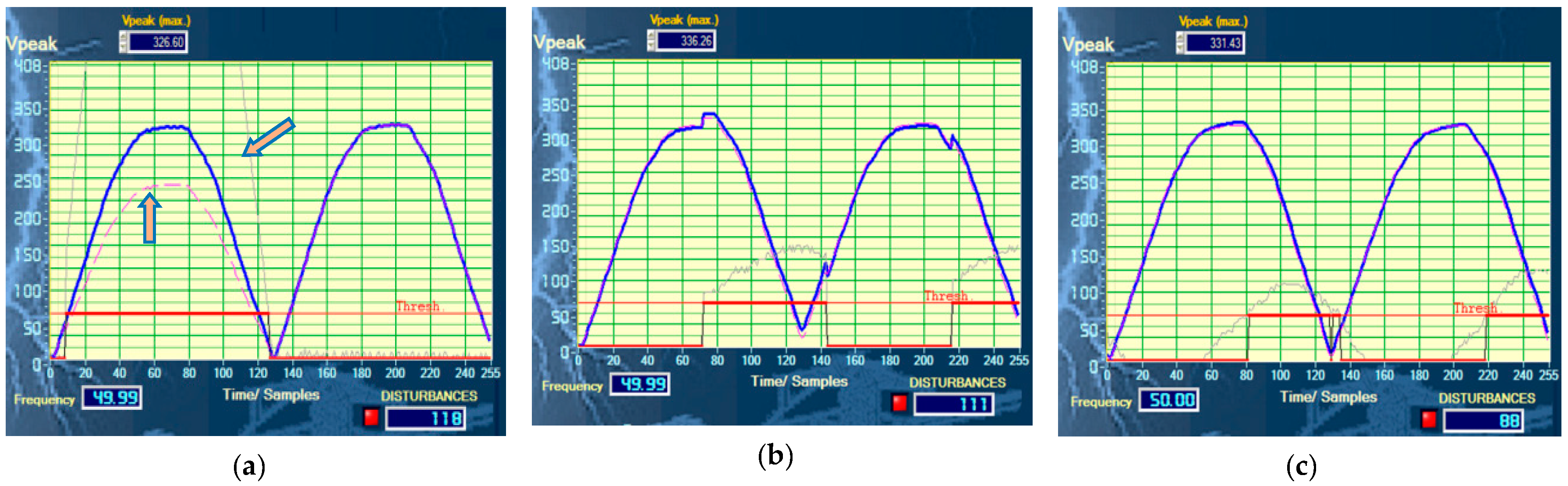
- Voltage fluctuations testing: Figure 10a shows a half-cycle sudden failure (blue). Thus, the filter predicts the half-cycle missing (magenta) and consequently detects the failure (the green line show the error value; the red one is the computed comparator result). Likewise, it also detects slow disturbances with a presence for a longer time than the period of the signal.
- Since detection is a strategy based on prediction, the code correctly detects the square transients (Figure 10b). When a square wave voltage is superimposed (frequencies of 10 Hz to 1 kHz), the algorithm presents a good differentiation (up to a relative threshold level of 6%, adjustable).
- Injecting a sine wave disturbance higher than 10 Hz, the system shows a good response, for different threshold values (Figure 10). In this case, it is possible to detect the harmonic distortion (4th-harmonic of the 50 Hz sine wave).
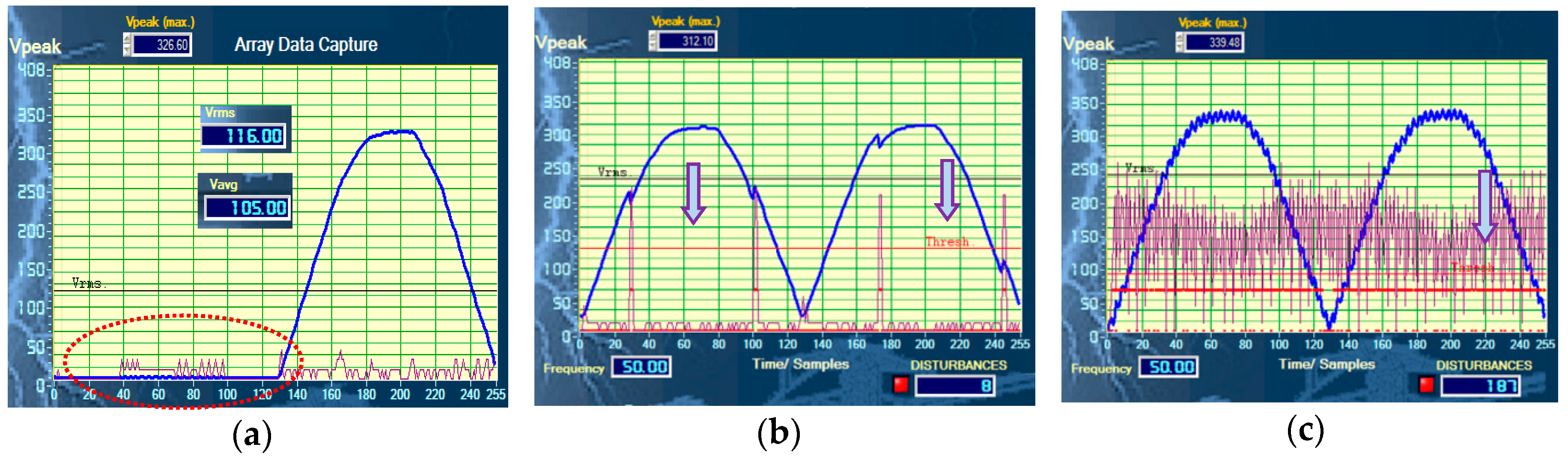
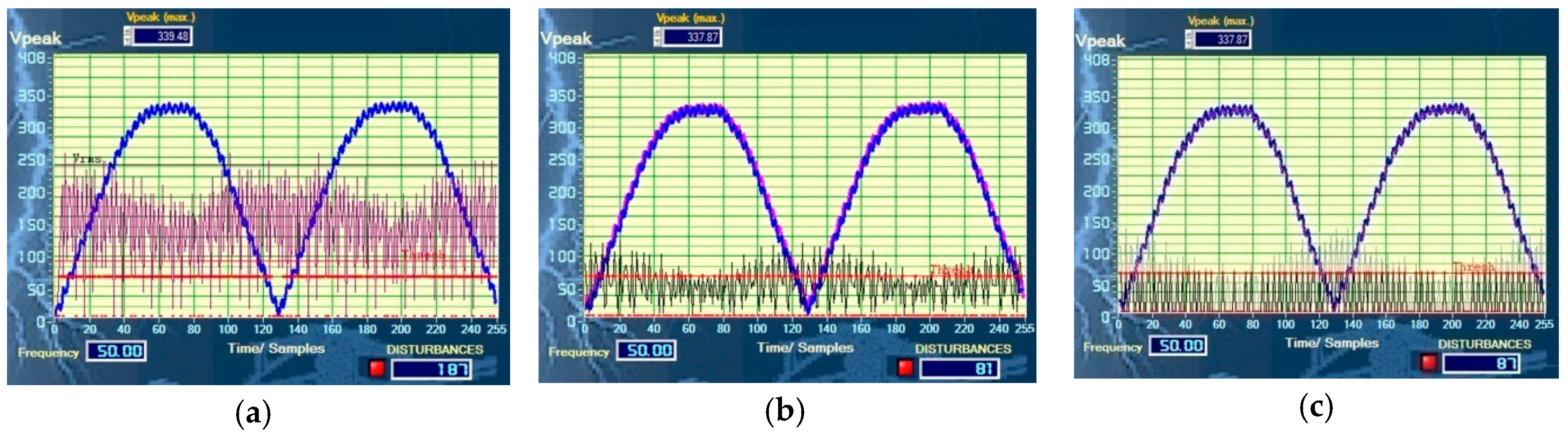
4.3. Method of Successive Integrations (LPF) and Comparison
- Voltage fluctuations testing: since the algorithm obtains an arithmetic average of each similar phase sample (during previous periods), this process is slow with respect to any very fast event that may occur in the immediate preceding half-cycle. In these situations, sometimes the algorithm can produce an erroneous result. However, since the final average is obtained from the immediately previous samples, it works quite accurately when sudden events occur, lasting longer than a half-cycle. In this case, a swell voltage variation is detected perfectly.
- This method works properly when a square disturbance is injected (Figure 11b). For square wave voltage superimposing tests (10 Hz and 1 kHz), the algorithm presents a good differentiation and detection (using a threshold level of 6%). If the phenomenon is persistent, the transient will gradually dissolve in the averaged waveform array (due to the filter effect).
- For low-frequency sinusoidal oscillation (hundreds of Hz), the procedure has an equally good detection response because it compares the current signal samples with the previous averaged sine wave and without transients (Figure 11c). It could also detect the harmonic distortion (presence of the 4th harmonic).
4.4. Performance in High Frequency
5. Conclusions
- In order to achieve a high penetration of sensor nodes, low-cost platforms are essential.
- For this reason, a special design is required, choosing low-energy and inexpensive hardware ad-hoc platforms and implementing specific algorithms to maximize the device performance.
- The 2nd-derivative Helmholtz method is quite sensitive to high-frequency interferences (brief oscillations) or pulses, while it is very insensitive to slow changes (harmonic distortion, sag or swell voltage).
- The Kalman filter option is the most effective and is able to show all kinds of anomalies that have been tested. The disadvantage is that it demands more memory and requires much more code implementation complexity.
- The ‘integration (LPF) and comparison’ method detects correctly for slow voltage variation or high-frequency disturbances (swell, sag, oscillations or short pulses, etc.). However, it is not capable of detecting short voltage variations with a shorter duration of a half cycle due to the integration time.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- IEEE Std. 1159-2009, IEEE Recommended Practice for Monitoring Electric Power Quality; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- IEC 61000-4-30. Electromagnetic Compatibility (EMC), Part 4: Testing and Measurement Techniques. Section 30: Power Quality Measurement Methods; International Electrotechnical Commission, IEC Central Office: Geneva, Switzerland, 2008. [Google Scholar]
- Neumann, R. The importance of IEC6100-4-30 Class A for the Coordination of Power Quality Levels. In Proceedings of the 9th International Conference Electrical Power Quality and Utilization, Barcelona, Spain, 9–11 October 2007. [Google Scholar] [CrossRef]
- IEC 61557-12. Electrical Safety in Low Voltage Distribution Systems up to 1000 V a.c. and 1500 V d.c. - Equipment for Testing. Measuring or Monitoring of Protective Measures - Part 12: Performance Measuring and Monitoring Devices (PMD), 2nd ed.; International Electrotechnical Commission, IEC Webstore: Geneve, Switzerland, 2018; Available online: https://webstore.iec.ch/publication/64047 (accessed on 22 April 2019).
- González de la Rosa, J.J.; Sierra-Fernández, J.M.; Palomares Salas, J.C.; Aguera Pérez, A.; Jiménez Montero, A. An application of spectral kurtosis to separate hybrid power quality events. Energies 2015. [Google Scholar] [CrossRef]
- González de la Rosa, J.J.; Aguera Pérez, A.; Palomares Salas, J.C.; Florencia-Oliveiros, O.; Sierra-Fernández, J.M. A dual Monitoring Technique to detect Power Quality Transients Based on the Fourth-Order Spectrogram. Energies 2018, 11, 503. [Google Scholar] [CrossRef]
- Palomares Salas, J.C.; González de la Rosa, J.J.; Sierra-Fernández, J.M.; Aguera Pérez, A. HOS Network-based classification of power quality events via regression algorithms. EURASIP J. Adv. Signal Process. 2015. [Google Scholar] [CrossRef]
- Valtierra-Rodriguez, M.; De Romero-Troncoso, J.; Osornio-Rios, R.A.; Garcia-Perez, A. Detection and classification of single and combined power quality disturbances using neural networks. IEEE Trans. Ind. Electron. 2014, 61. [Google Scholar] [CrossRef]
- Borges, F.A.S.; Fernandes, R.A.S.; Silva, I.N.; Silva, C.B.S. Feature Extraction and Power Quality Disturbances Classification Using Smart Meters Signals. IEEE Trans. Ind. Inform. 2016, 12, 824–833. [Google Scholar] [CrossRef]
- Zygarlicki, J.; Zygarlicka, M.; Mroczka, J.; Latawiec, K.J. A Reduced Prony’s Method in Power-Quality Analysis Parameters Selection. IEEE Trans. Power Deliv. 2010, 25. [Google Scholar] [CrossRef]
- Liu, Z.; Cui, Y.; Li, W. Combined Power Quality Disturbances Recognition Using Wavelet Packet Entropies and S-Transform. Entropy 2015. [Google Scholar] [CrossRef]
- He, S.; Li, K.; Zhang, M. A Real-Time Power Quality Disturbances Classification Using Hybrid Methods Based on S-Transform and Dynamics. IEEE Trans. Instrum. Meas. 2013, 62. [Google Scholar] [CrossRef]
- Dash, P.K.; Chilukuri, M.V. Hybrid S-Transform and Kalman Filtering Approach for Detection and Measurement of Short Duration Disturbances in Power Networks. IEEE Trans. Instrum. Meas. 2004, 53. [Google Scholar] [CrossRef]
- Granados, D.; Romero, R.J.; Osornio, R.A.; Garcia, A. Techniques and methodologies for power quality analysis and disturbances classification in power systems: A review. IET Gener. Transm. Distrib. 2011, 5. [Google Scholar] [CrossRef]
- Barros, J.; Diego, R.I. Review of signal processing techniques for detection of transient disturbances in voltage supply systems. In Proceedings of the IEEE Instrumentation and Measurement Technology Conference, Minneapolis, MN, USA, 6–9 May 2013. [Google Scholar] [CrossRef]
- Artioli, M.; Pasini, G.; Peretto, L.; Sasdelli, R. Low-cost DSP-based equipment for the real-time detection of transients in power systems. IEEE Trans. Instrum. Meas. 2004, 53. [Google Scholar] [CrossRef]
- Gallo, D.; Landi, C.; Luiso, M.; Bucci, G.; Fiorucci, E. Low Cost Smart Power Metering. In Proceedings of the 2013 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Minneapolis, MN, USA, 6–9 May 2013; pp. 763–776. [Google Scholar] [CrossRef]
- Granados, D.; Valtierra, M.; Morales, L.A.; Romero, R.J.; Osornio, R.A. A Hilbert Transform-Based Smart Sensor for detection, Classification and Quantification of Power Quality Disturbances. Sensors 2013. [Google Scholar] [CrossRef]
- Yingkayun, K.; Premrudeepreechacharn, S.; Watson, N.R.; Higuchi, K. Power Quality monitoring system based on embedded system with network monitoring. Sci. Res. Essays 2012, 7. [Google Scholar] [CrossRef]
- Quiros-Olozabal, A.; Gonzalez-de-la-Rosa, J.J.; Cifredo-Chacon, M.A.; Sierra-Fernandez, J.M. A novel FPGA-based system for real-time calculation of the Spectral Kurtosis: A prospective application to harmonic detection. Measurement 2016, 86. [Google Scholar] [CrossRef]
- Asha Kiranmai, S.; JayaLaxmi, A. Hardware for classification of power quality problems in three phase system using Microcontroller. Cogent Eng. 2017, 4. [Google Scholar] [CrossRef]
- Alam, K.; Chakraborty, T.; Pramanik, S.; Sardda, D.; Mal, S. Measurement of Power Frequency with Higher Accuracy Using PIC Microcontroller. Procedia Technol. 2013, 10. [Google Scholar] [CrossRef]
- Malekpour, M.; Pouramin, A.; Malekpour, A.; Phung, T.; Ambikairajah, E. Monitoring and measurement of high-frequency oscillatory transient recovery voltage of circuit breakers. IET Sci. Meas. Technol. 2018, 12. [Google Scholar] [CrossRef]
- Gajjar, S.; Choksi, N.; Sarkar, M.; Dasgupta, K. Comparative analysis of Wireless Sensor Network Motes. In Proceedings of the 2014 International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 20–21 February 2014; ISBN 978-1-4799-2865-1. [Google Scholar] [CrossRef]
- Maurya, M.; Shukla, S.R.N. Current Wireless Sensor Nodes (MOTES): Performance metrics and Constraints. Int. J. Adv. Res. Electron. Commun. Eng. 2013, 2. Available online: http://ijarece.org/wp-content/uploads/2013/08/IJARECE-VOL-2-ISSUE-1-45-48.pdf) (accessed on 19 February 2019).
- Zhong, D.; Li, H.; Han, J.; Wei, Q. A Practical Combining Wireless Sensor Networks and Internet of Things: Safety Management System for Tower Crane Groups. Sensors 2014. [Google Scholar] [CrossRef]
- Alonso-Rosa, M.; Gil-de-Castro, A.; Medina-Gracia, R.; Moreno-Munoz, A.; Cañete-Carmona, E. Novel Internet of Things Platform for In-Building Power Quality Submetering. Appl. Sci. 2018, 8, 1320. [Google Scholar] [CrossRef]
- Viciana, E.; Alcayde, A.; Montoya, F.G.; Baños, R.; Arrabal-Campos, F.M.; Manzano-Agugliaro, F. An Open Hardware Design for Internet of Things Power Quality and Energy Saving Solutions. Sensors 2019, 19, 627. [Google Scholar] [CrossRef] [PubMed]
- Microchip—Atmel. Internet of Things Page Application. Available online: https://www.microchip.com/design-centers/internet-of-things/google-cloud-iot/avr-iot (accessed on 22 April 2019).
- Kalman, R.E. A new approach to linear filtering and prediction problems. Trans. Am. Soc. Mech. Eng. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| a) Interruptions (Categories) | Amplitude (230 V RMS/50 Hz) | Duration | b) Transients /Disturbances | Typical Spectral | Typical Duration | Relative Duration (D) (230 V RMS/50 Hz) |
|---|---|---|---|---|---|---|
| Instantaneous: | Impulsive: | |||||
| -Sag | 207 V to 23 V | 0.5 to 30 cycles or 10 ms to 0.5 s | -Short | 5 ns rise | < 50 ns | T = 50 ns → D = 25×10−5% |
| -Swell | 253 V to 414 V | -Medium | 1 μs rise | 0.05 to 1 ms | T = 0.5 ms → D = 2.5% | |
| Momentary: | −10% cycle | 0.1 ms | < 1 ms | T = 1 ms → D = 5.0% | ||
| -Interruption | <23 V | 0.5 s to 3.0 s or 25 to 150 cycles | Oscillatory: | |||
| -Sag | 207 V to 23 V | -Low freq. | <5 kHz | 0.3 to 50 ms | T = 0.3 ms → D = 1.5% | |
| -Swell | 253 V to 414 V | T = 50 ms → D = 250% | ||||
| Temporary: | 0 to 920 V | |||||
| -Interruption | <23 V | 3.0 s to 1.0 min or 150 to 3000 cycles | -Med. freq. | 5 to 500 kHz | 20 μs | T = 20 μs → D = 0.1% |
| -Sag | 207 V to 23 V | 0 to 1840 V | ||||
| -Swell | 253 V to 414 V | -High freq. | 0.5 to 5 MHz | 5 μs | T = 5μs →D = 25×10−3% | |
| Long duration: | 0 to 920 V | |||||
| -Sust. Interr. | ≈0 V | >1.0 min or 3000 cycles | ||||
| -Under-volt. | 207 V to 184 V | |||||
| -Over-voltage | 253 V to 414 V | |||||
| Disturbance | Helmholtz Equation | Kalman Filter | Successive Integrations and Comparison |
|---|---|---|---|
| Sag/Swell | NO, False detections | Yes | Yes |
| Half-cycle off | NO, False detections | Yes | NO, slow for half-cycle |
| Pulse 100 Hz/10% | count any sudden pulses | Yes | Yes |
| Pulse 1 kHz/10% | Yes | Yes | Yes |
| Pulse 10 kHz/10% | Yes | Yes | Yes |
| Oscillation 200 Hz/10% | No sure detection (low freq.) | Yes | Yes |
| Oscillation 1 kHz/10% | Yes | Yes | Yes |
| Oscillation 10 kHz/10% | Yes, best if F > F sampling | Yes, work F > F sampling | Yes, work to F > F sampling |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerrero-Rodríguez, J.-M.; Cobos-Sánchez, C.; González-de-la-Rosa, J.-J.; Sales-Lérida, D. An Embedded Sensor Node for the Surveillance of Power Quality. Energies 2019, 12, 1561. https://doi.org/10.3390/en12081561
Guerrero-Rodríguez J-M, Cobos-Sánchez C, González-de-la-Rosa J-J, Sales-Lérida D. An Embedded Sensor Node for the Surveillance of Power Quality. Energies. 2019; 12(8):1561. https://doi.org/10.3390/en12081561
Chicago/Turabian StyleGuerrero-Rodríguez, José-María, Clemente Cobos-Sánchez, Juan-José González-de-la-Rosa, and Diego Sales-Lérida. 2019. "An Embedded Sensor Node for the Surveillance of Power Quality" Energies 12, no. 8: 1561. https://doi.org/10.3390/en12081561
APA StyleGuerrero-Rodríguez, J.-M., Cobos-Sánchez, C., González-de-la-Rosa, J.-J., & Sales-Lérida, D. (2019). An Embedded Sensor Node for the Surveillance of Power Quality. Energies, 12(8), 1561. https://doi.org/10.3390/en12081561