Solar Irradiance Forecast Using Naïve Bayes Classifier Based on Publicly Available Weather Forecasting Variables


Abstract
1. Introduction
2. Data Description
2.1. Weather Variables
2.2. Solar Irradiance
3. Two-Days-Ahead Forecast Model
3.1. Step 1: Deterministic Characteristic of Solar Irradiance
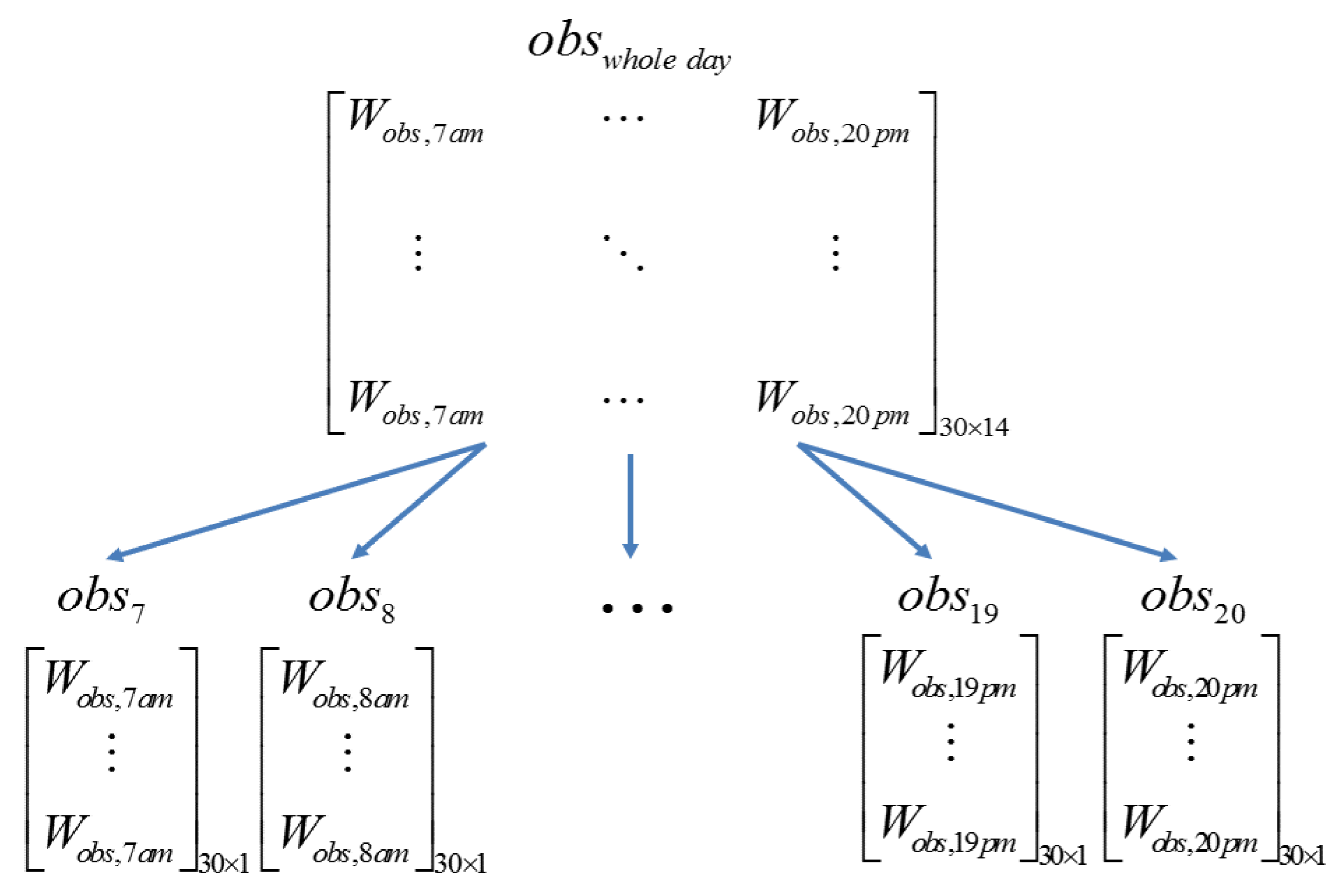
3.2. Step 2: Solar Irradiance Variation by Clouds
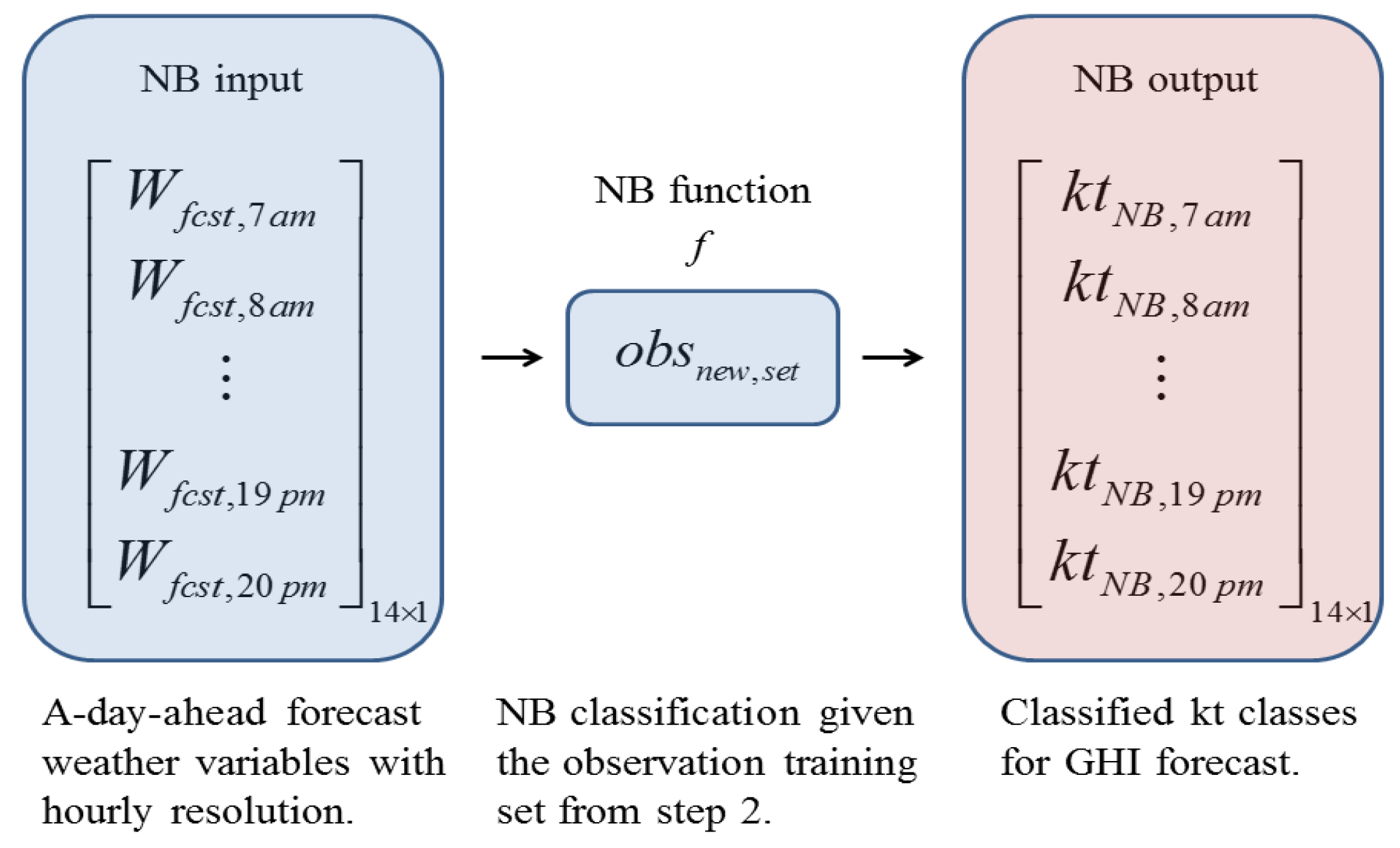
3.3. Step 3: Naïve Bayes Classifier
3.3.1. Estimation of : Kernel Methods
3.3.2. Update Posterior of C: Calculating the Value of
4. Forecasting Test
4.1. Diagnostic Checking
4.2. Model Testing
4.2.1. Monthly Results: Seasonal Effect
4.2.2. 4-Days-Results: Various Weather vs. Specified Weather Types
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hosenuzzaman, M.; Rahim, N.A.; Selvaraj, J.; Hasanuzzaman, M.; Malek, A.A.; Nahr, A. Global prospects, progress, policies, and environmental impact of solar photovoltaic power generation. Renew. Sustain. Energy Rev. 2015, 41, 284–497. [Google Scholar] [CrossRef]
- Kamada, R.; Yagioka, T.; Adachi, S.; Handa, A.; Tai, K.F.; Kato, T.; Sugimoto, H. New world record Cu (In, Ga)(Se, S) 2 thin film solar cell efficiency beyond 22%. In Proceedings of the Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016; pp. 1287–1291. [Google Scholar]
- Bacha, S.; Picault, D.; Burger, B.; Etxeberria-Otadui, I.; Martins, J. Photovoltaics in microgrids: An overview of grid integration and energy management aspects. IEEE Ind. Electron. Mag. 2015, 9, 33–46. [Google Scholar] [CrossRef]
- Schittekatte, T.; Stadler, M.; Cardoso, G.; Mashayekh, S.; Sankar, N. The impact of short-term stochastic variability in solar irradiance on optimal microgrid design. IEEE Trans. Smart Grid 2018, 9, 1647–1656. [Google Scholar] [CrossRef]
- Monjoly, S.; Andre, M.; Calif, R.; Soubdhan, T. Hourly forecasting of global solar radiation based on multiscale decomposition methods: A hybrid approach. Energy 2017, 119, 288–298. [Google Scholar] [CrossRef]
- Masters, G.M. Renewable and Efficient Electric Power Systems; Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Raza, M.Q.; Nadarajah, M.; Ekanayake, C. On recent advances in PV output power forecast. Sol. Energy 2016, 136, 125–144. [Google Scholar] [CrossRef]
- Reikard, G. Predicting solar radiation at high resolutions: A comparison of time series forecasts. Sol. Energy 2009, 83, 342–349. [Google Scholar] [CrossRef]
- Mellit, A.; Pavan, A.M. A 24-h forecast of solar irradiance using artificial neural network: Application for performance prediction of a grid-connected PV plant at Trieste, Italy. Sol. Energy 2010, 84, 807–821. [Google Scholar] [CrossRef]
- Chen, C.; Duan, S.; Cai, T.; Liu, B. Online 24-h solar power forecasting based on weather type classification using artificial neural network. Sol. Energy 2011, 85, 2856–2870. [Google Scholar] [CrossRef]
- Sfetsos, A.; Coonick, A.H. Univariate and Multivariate Forecasting of Hourly Solar Radiation with Artificial Intelligence Techniques. Sol. Energy 2000, 68, 169–178. [Google Scholar] [CrossRef]
- Kemmoku, Y.; Orita, S.; Nakagawa, S. Daily insolation forecasting using a multi-stage neural network. Sol. Energy 1999, 66, 193–199. [Google Scholar] [CrossRef]
- NOAA. Available online: http://www.noaa.gov (accessed on 23 March 2019).
- WeatherSpark. Available online: http://weatherspark.com/averages/29684/Austin-Texas-United-States (accessed on 23 March 2019).
- Poggi, P.; Notton, G.; Muselli, M.; Louche, A. Stochastic study of hourly total solar radiation in Corsica using a Markov model. Int. J. Climatol. 2000, 20, 1843–1860. [Google Scholar] [CrossRef]
- Mitchell, T. Machine Learning, 1st ed.; McGraw-Hill Science/Engineering/Math: New York, NY, USA, 1997; ISBN 0070428077. [Google Scholar]
- Shi, J.; Lee, W.J.; Liu, Y.; Yang, Y.; Peng, W. Forecasting Power Output of Photovoltaic System Based on Weather Classification and Support Vector Machines. IEEE Trans. Ind. Appl. 2012, 48, 1064–1069. [Google Scholar] [CrossRef]
- Härdle, W. Smoothing Technique: With Implementation in S.; Springer: New York, NY, USA, 1991. [Google Scholar]
- DeGroo, M.H.; Schervish, M.J. Probability and Statistics; Addison Wesley: Boston, MA, USA, 2001. [Google Scholar]
- Armstrong, J.S.; Collopy, F. Error Measures for Generalizing about Forecasting Methods: Empirical Comparisons. Int. J. Forecast. 1992, 8, 69–80. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Month | r (%) | Training Days | MAE (Wh/m2) | RMBE (%) | |||||
|---|---|---|---|---|---|---|---|---|---|
| August | 5/999 | 551.28 | 306.65 | 90.38 | 26 | 33.42 | 62.31 | 126.8 | 6.06 |
| September | 0/926 | 452.85 | 302.79 | 86.55 | 26 | 23.46 | 78.18 | 143.64 | 5.18 |
| October | 0/879 | 348.18 | 284.98 | 84.7 | 28 | 12.56 | 84.48 | 143.66 | 3.61 |
| November | 0/746 | 227.11 | 232.94 | 87.29 | 36 | 40.49 | 76.51 | 117.22 | 17.83 |
| December | 0/643 | 210.87 | 212.16 | 78.37 | 40 | 4.95 | 73.77 | 126.49 | 2.35 |
| January | 0/745 | 273.30 | 240.28 | 91.42 | 50 | –11.09 | 57.04 | 91.03 | –4.06 |
| February | 0/853 | 254.80 | 269.35 | 80.98 | 24 | –12.89 | 105.17 | 147.91 | –5.06 |
| March | 0/972 | 338.68 | 300.83 | 80.9 | 30 | –32.85 | 107.37 | 167.32 | –9.7 |
| Total | 0/999 | 333.04 | 292.47 | 86.33 | 30 | 9.09 | 80.39 | 138.85 | 2.73 |
| (8 months) | |||||||||
| Weather Type | r (%) | RMBE (%) |
|---|---|---|
| Type 1 | 99.82 | −1.49 |
| Type 2 | 84.16 | −1.33 |
| Type 3 | 96.86 | −3.4 |
| Type 4 | 74.18 | −8.43 |
| Method | Structure | Weather Type | r (%) | RMBE (%) | MAPE (%) |
|---|---|---|---|---|---|
| ANN in [10] | Three layers (input, hidden, output) & 6 input variables | Sunny | 98.77 | x | 9.45 |
| Cloudy | 98.46 | x | 9.88 | ||
| Rainy | 65.63 | x | 38.11 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, Y.; Kwasinski, A.; Kwasinski, A. Solar Irradiance Forecast Using Naïve Bayes Classifier Based on Publicly Available Weather Forecasting Variables. Energies 2019, 12, 1529. https://doi.org/10.3390/en12081529
Kwon Y, Kwasinski A, Kwasinski A. Solar Irradiance Forecast Using Naïve Bayes Classifier Based on Publicly Available Weather Forecasting Variables. Energies. 2019; 12(8):1529. https://doi.org/10.3390/en12081529
Chicago/Turabian StyleKwon, Youngsung, Alexis Kwasinski, and Andres Kwasinski. 2019. "Solar Irradiance Forecast Using Naïve Bayes Classifier Based on Publicly Available Weather Forecasting Variables" Energies 12, no. 8: 1529. https://doi.org/10.3390/en12081529
APA StyleKwon, Y., Kwasinski, A., & Kwasinski, A. (2019). Solar Irradiance Forecast Using Naïve Bayes Classifier Based on Publicly Available Weather Forecasting Variables. Energies, 12(8), 1529. https://doi.org/10.3390/en12081529