A Current Reconstruction Strategy Following the Operation Area in a 1-Shunt Inverter System


Abstract
:1. Introduction
2. The Conventional Method Using PWM Shift
3. The Proposed Reconstruction Method of the Phase Current
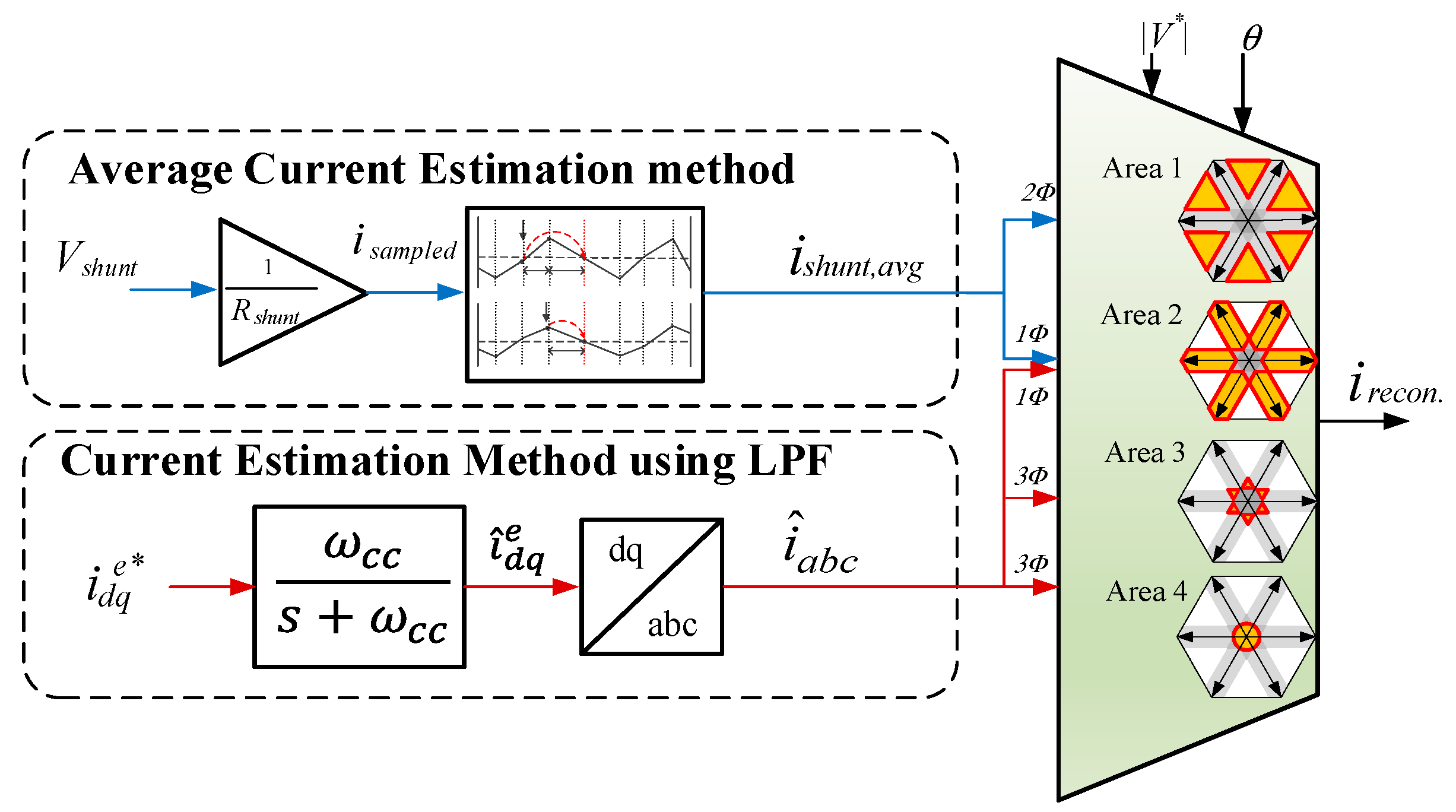
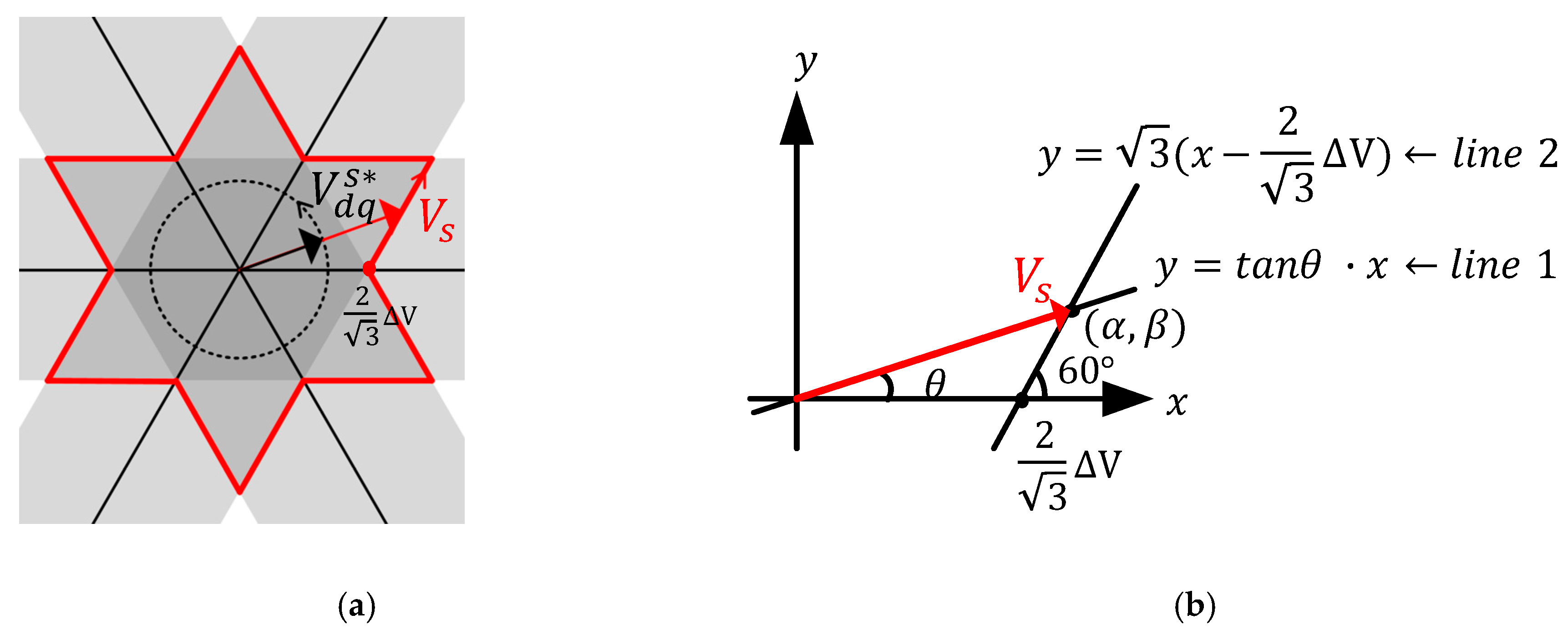
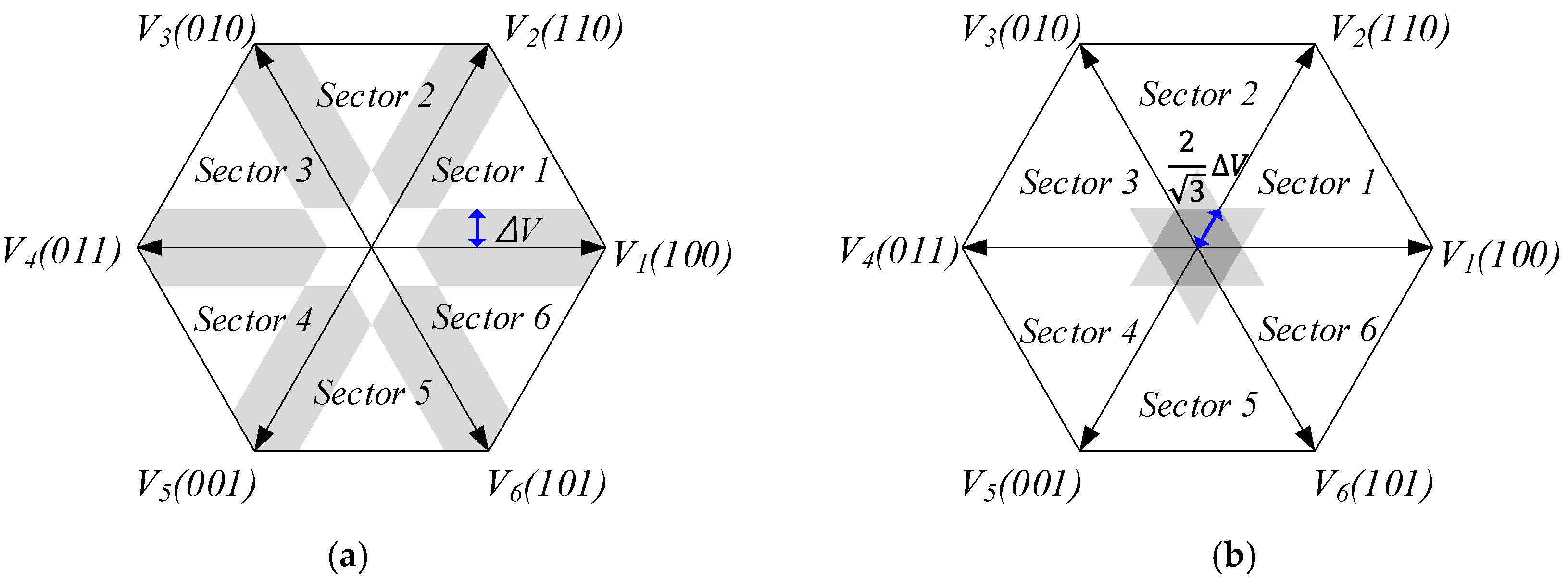
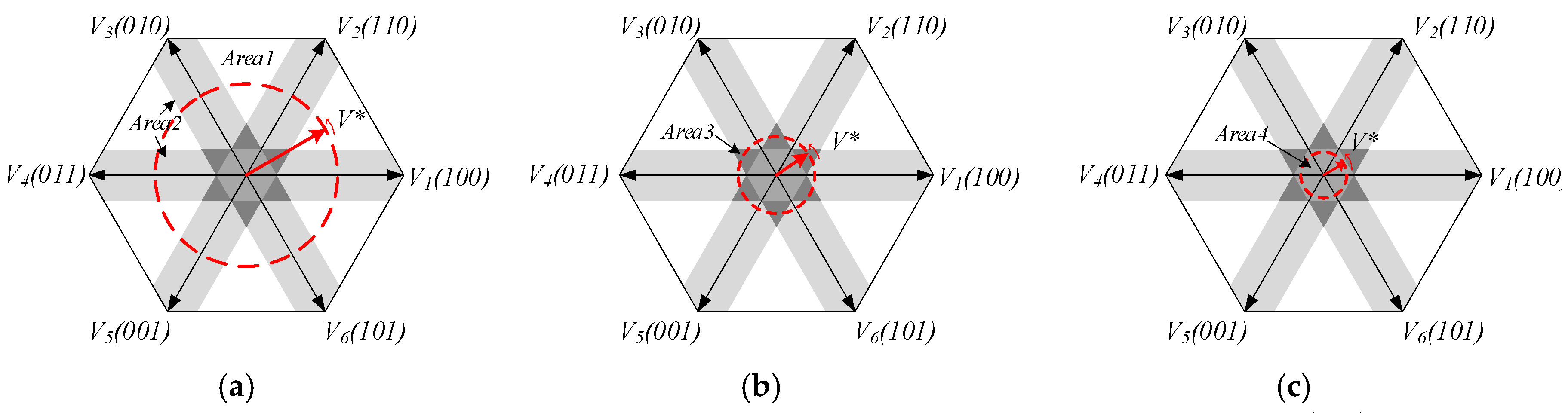
3.1. The Division of Operation Area for the Current Reconstruction
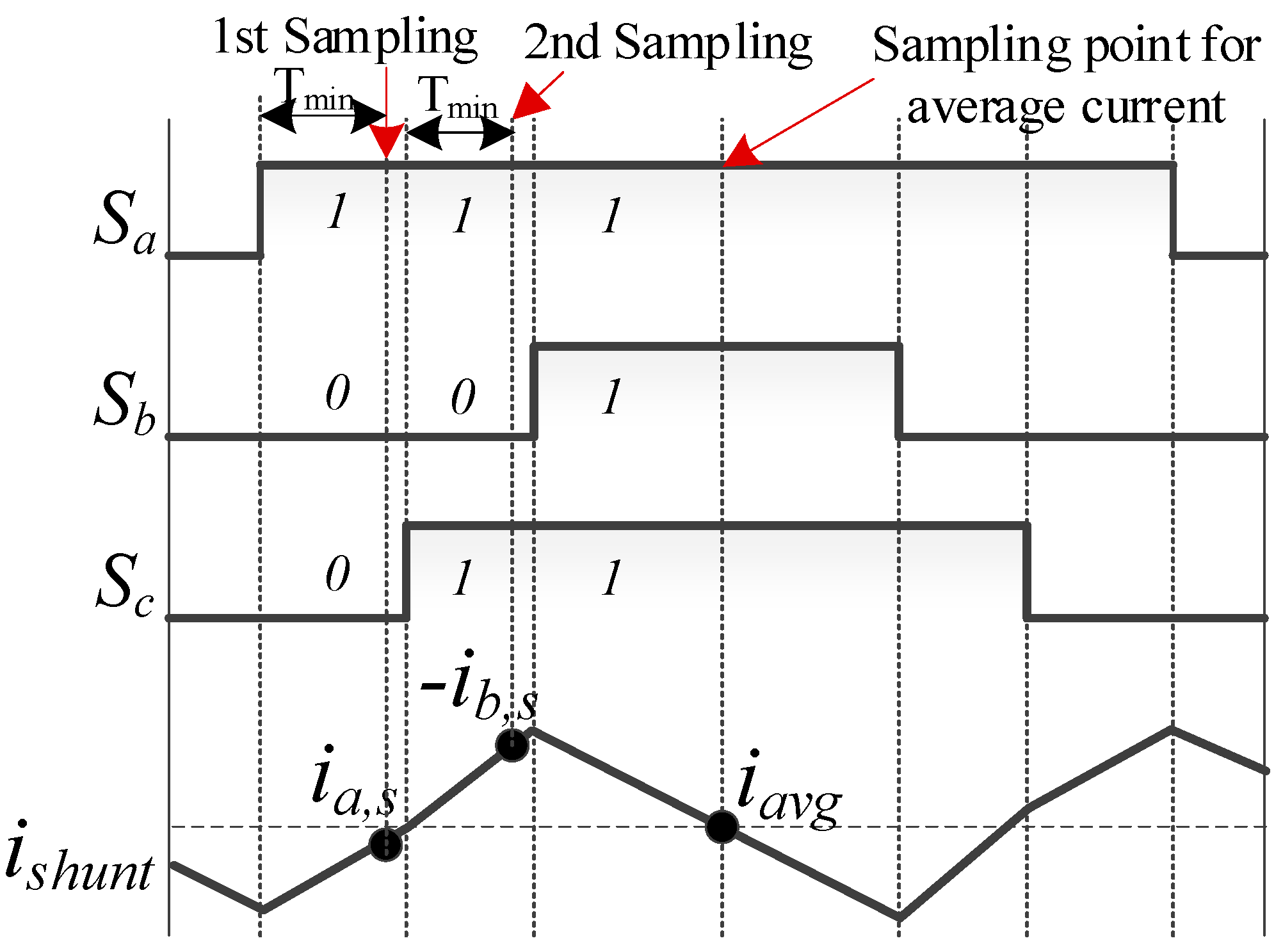
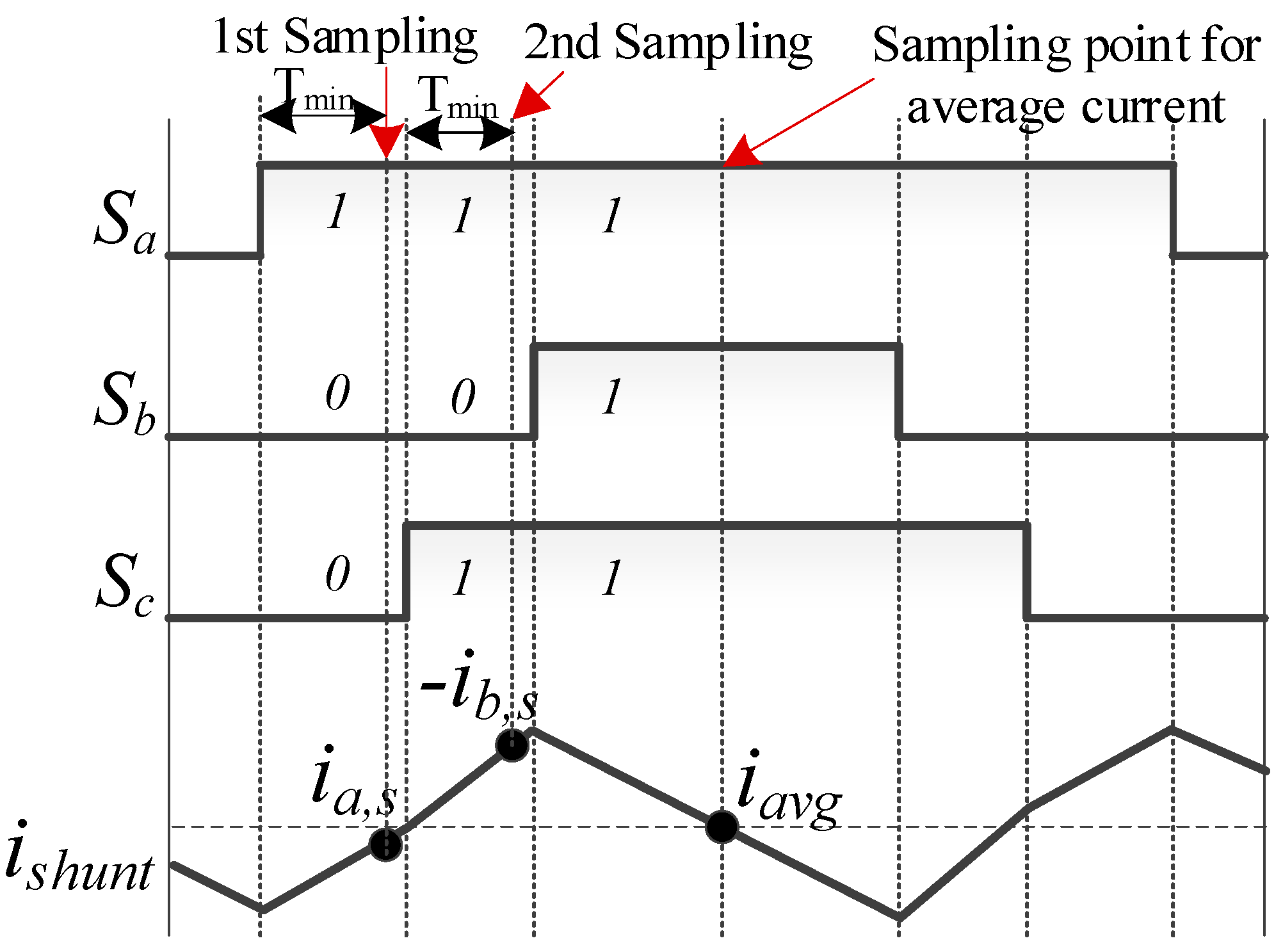
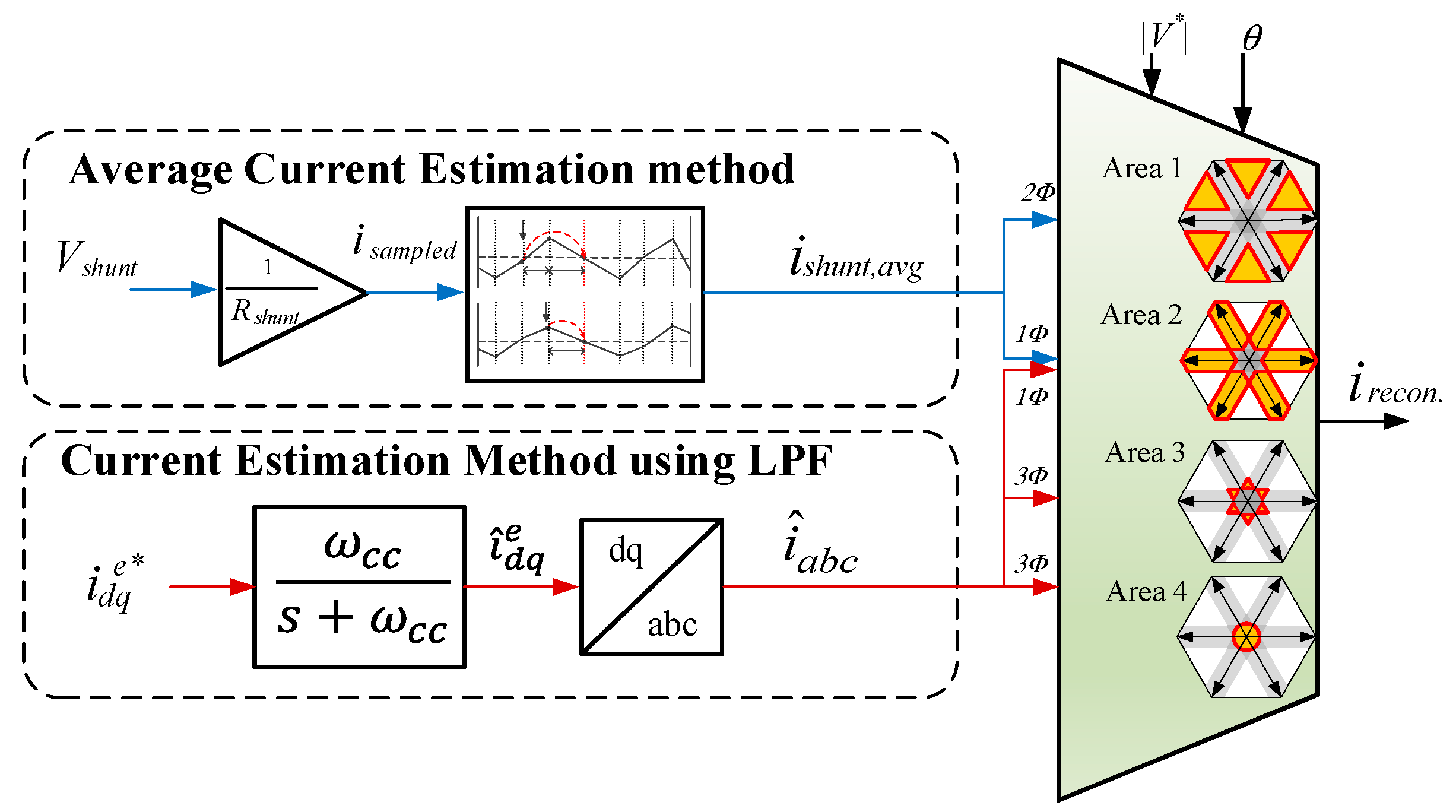
3.2. The Average Current Estimation Method from the Shunt Resistor in Area 1
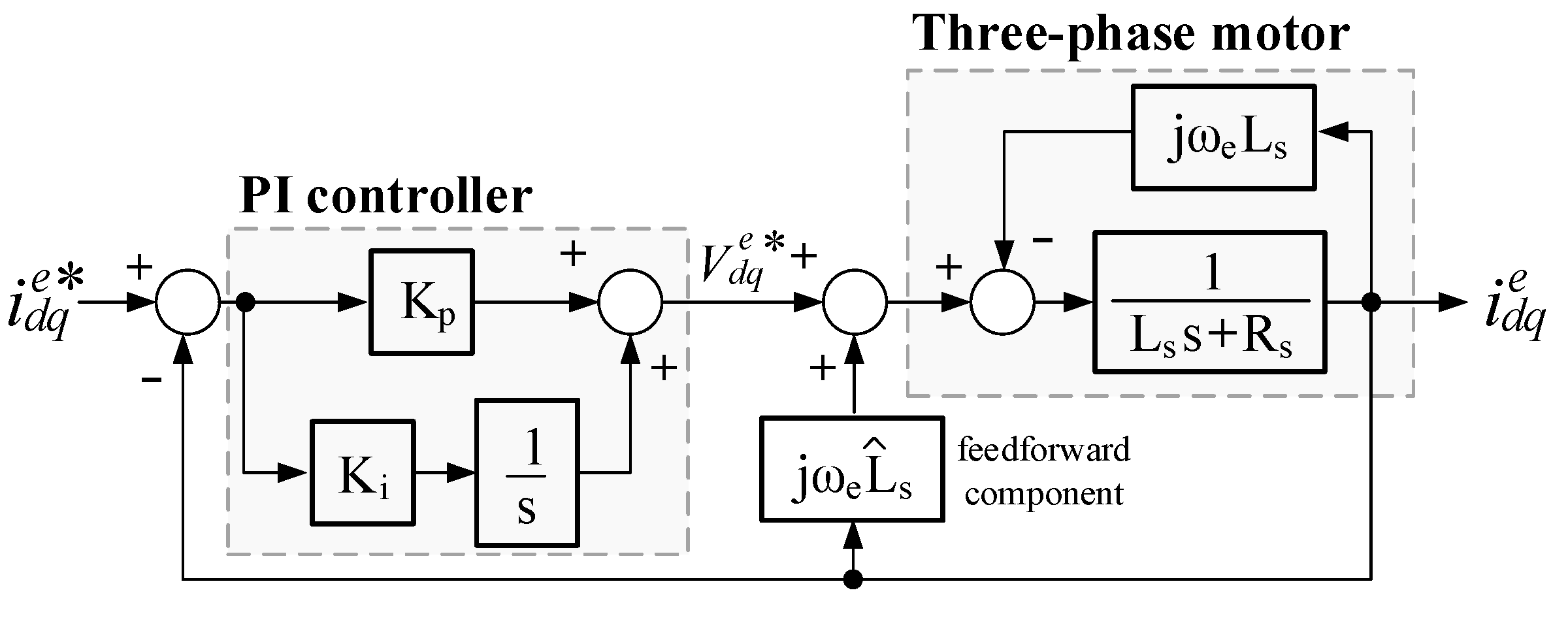
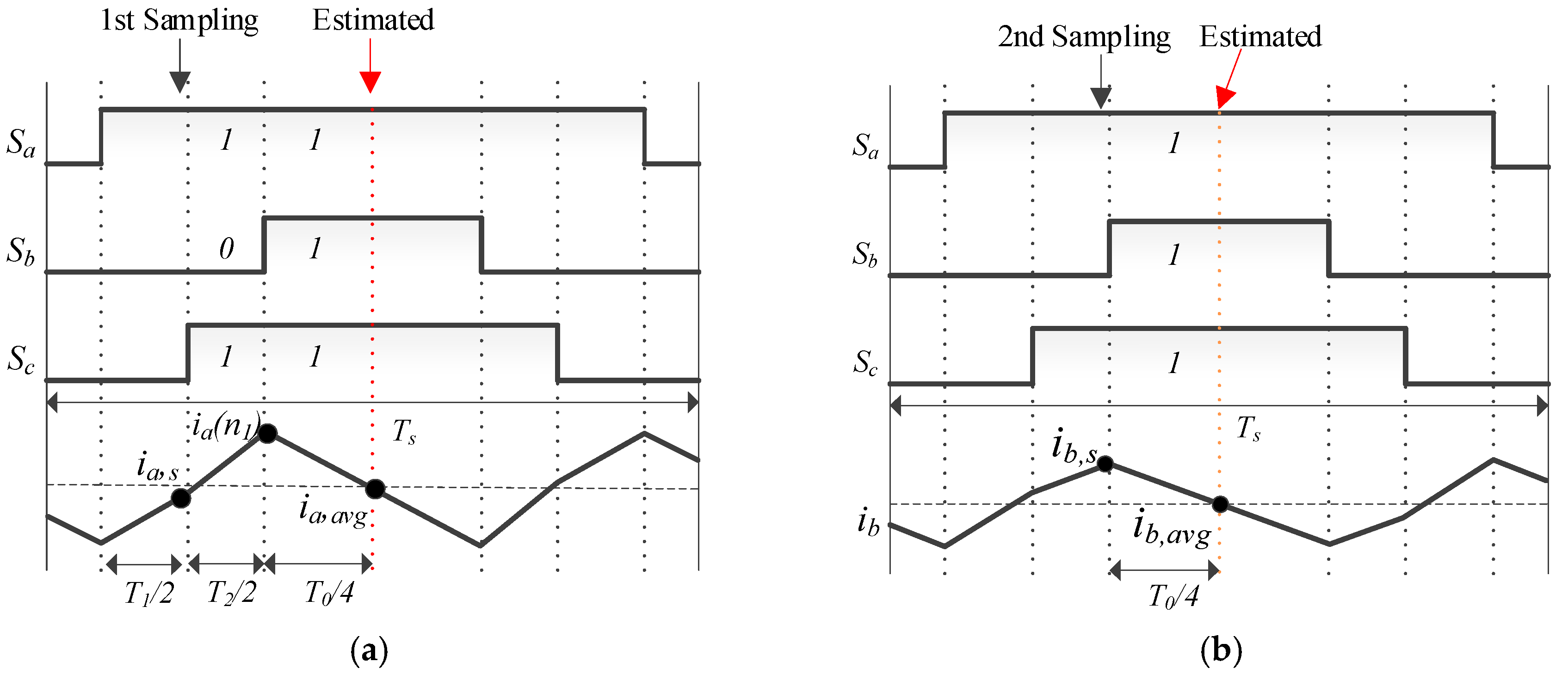
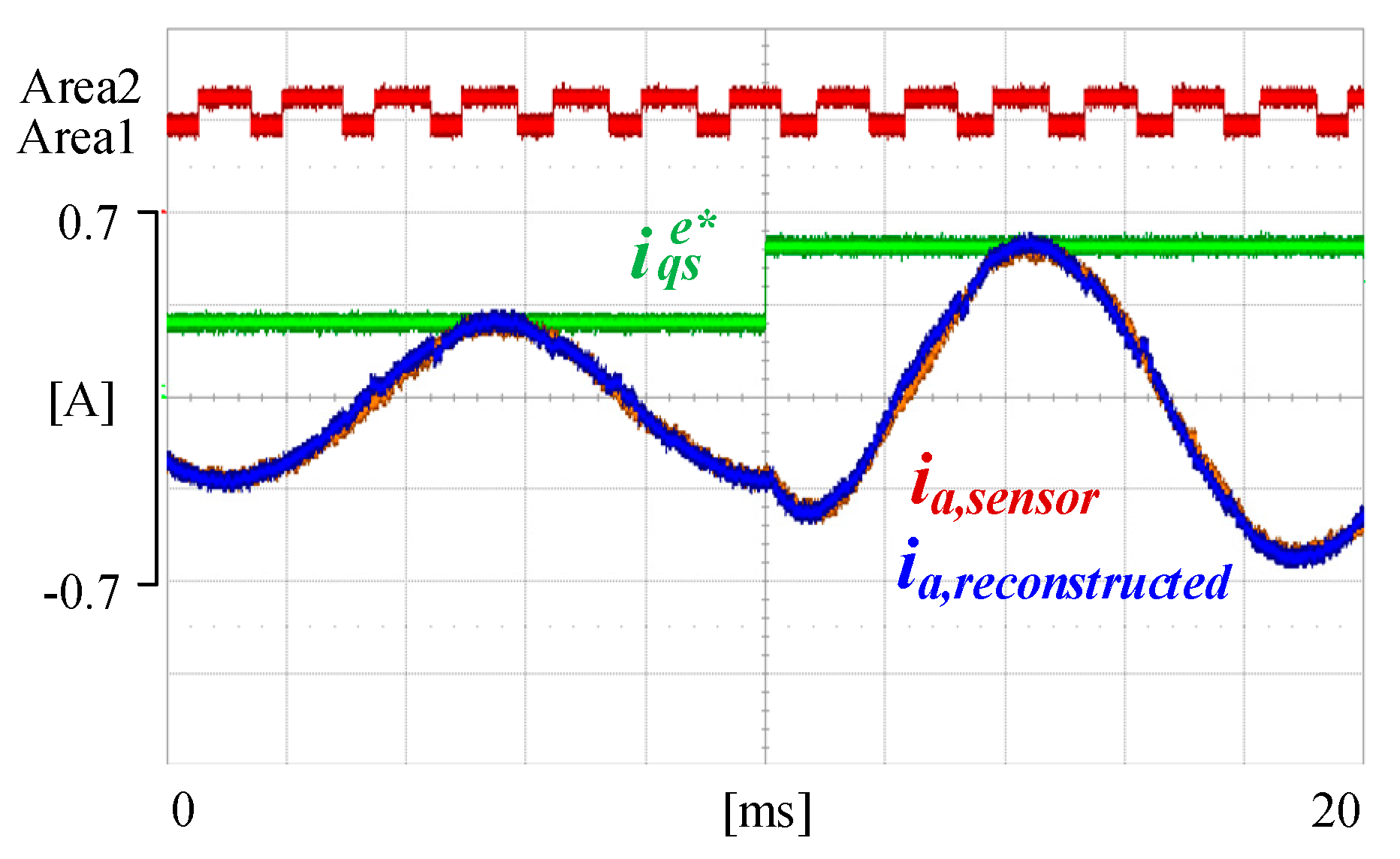
3.3. The Current Estimation Method Using Current Reference in the Unmeasurable Region
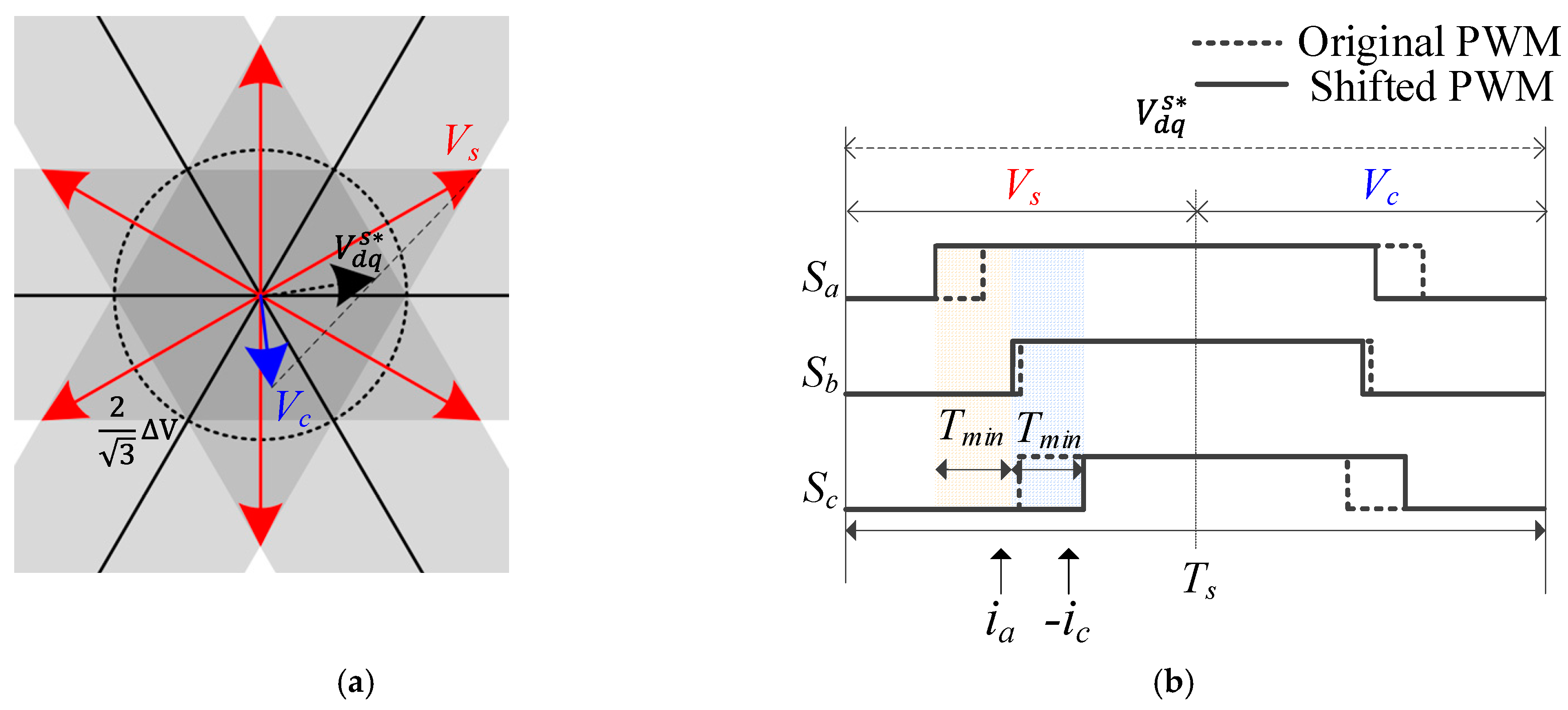
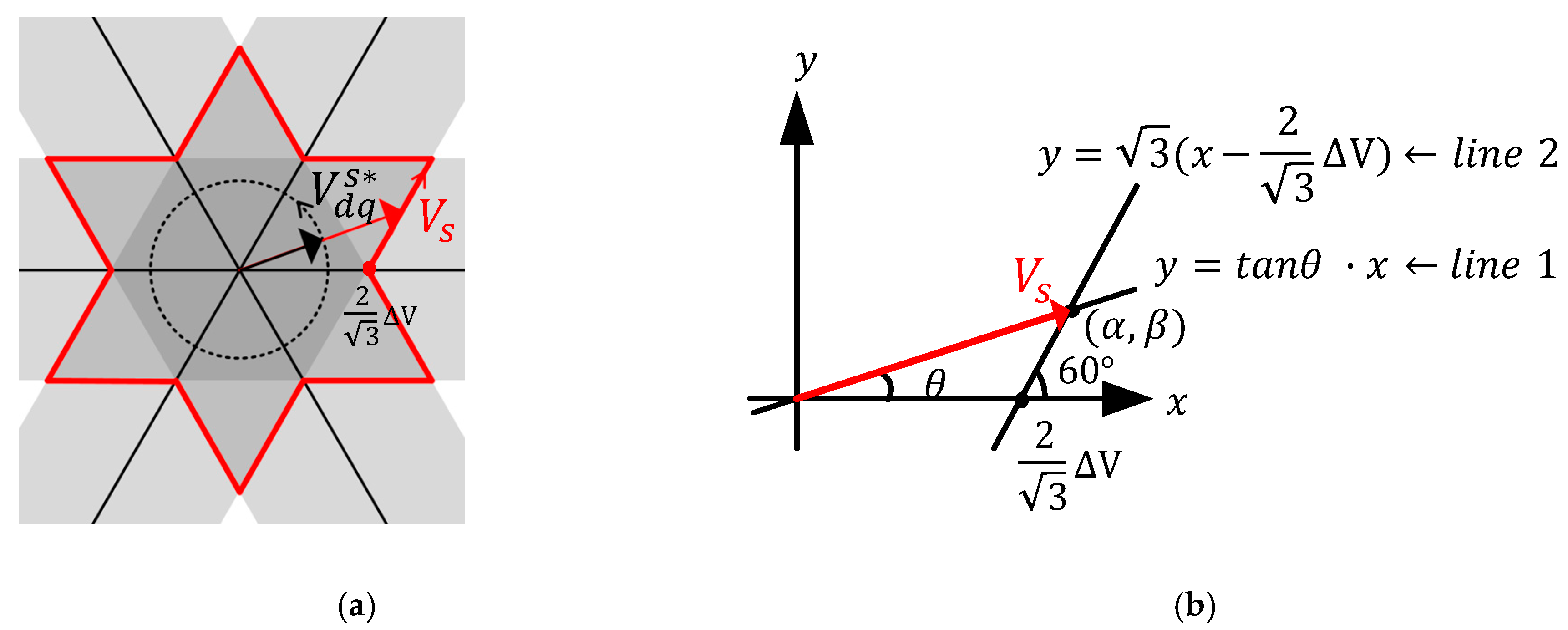
3.4. Intermittent PWM Shift Method
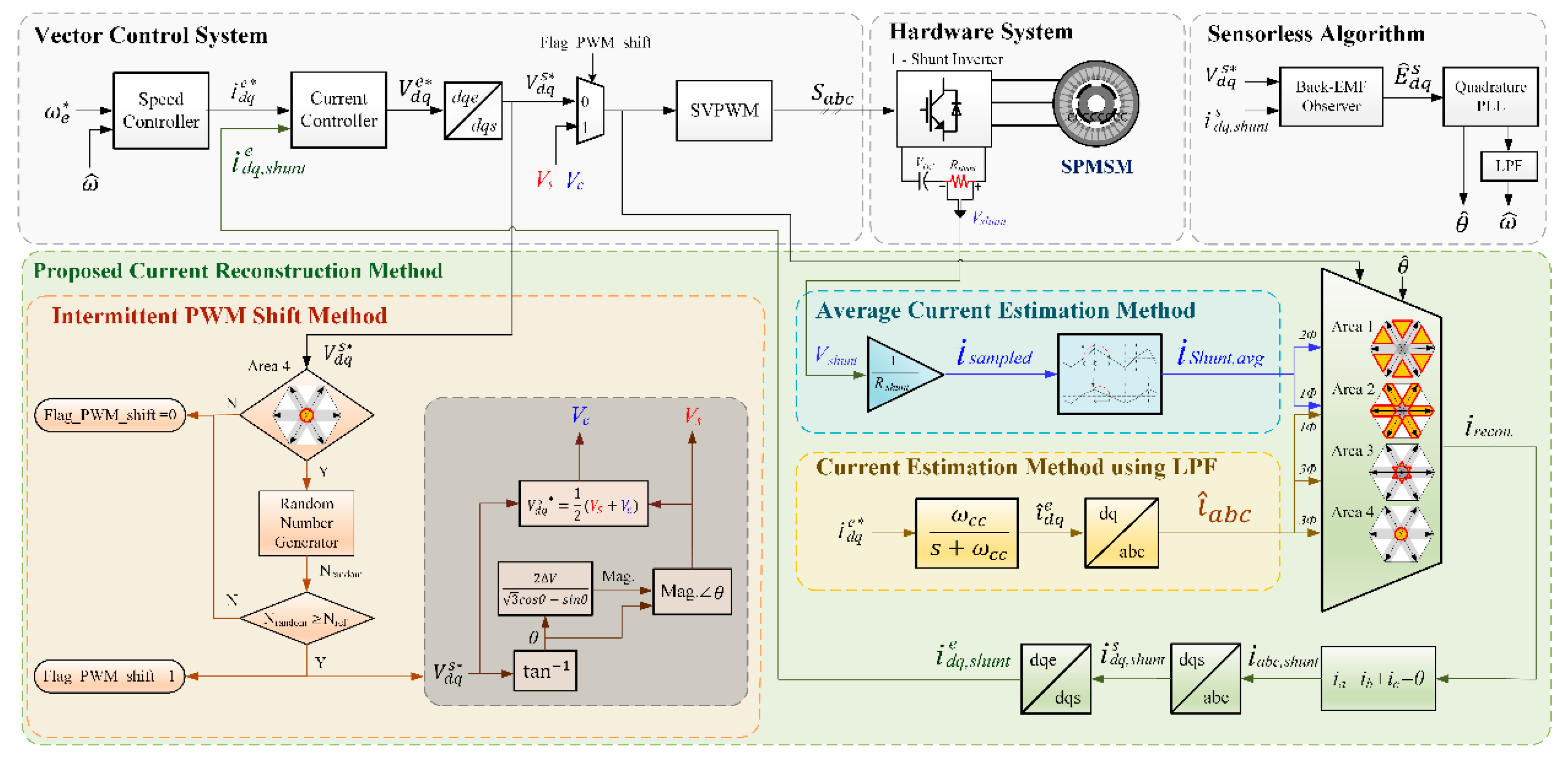
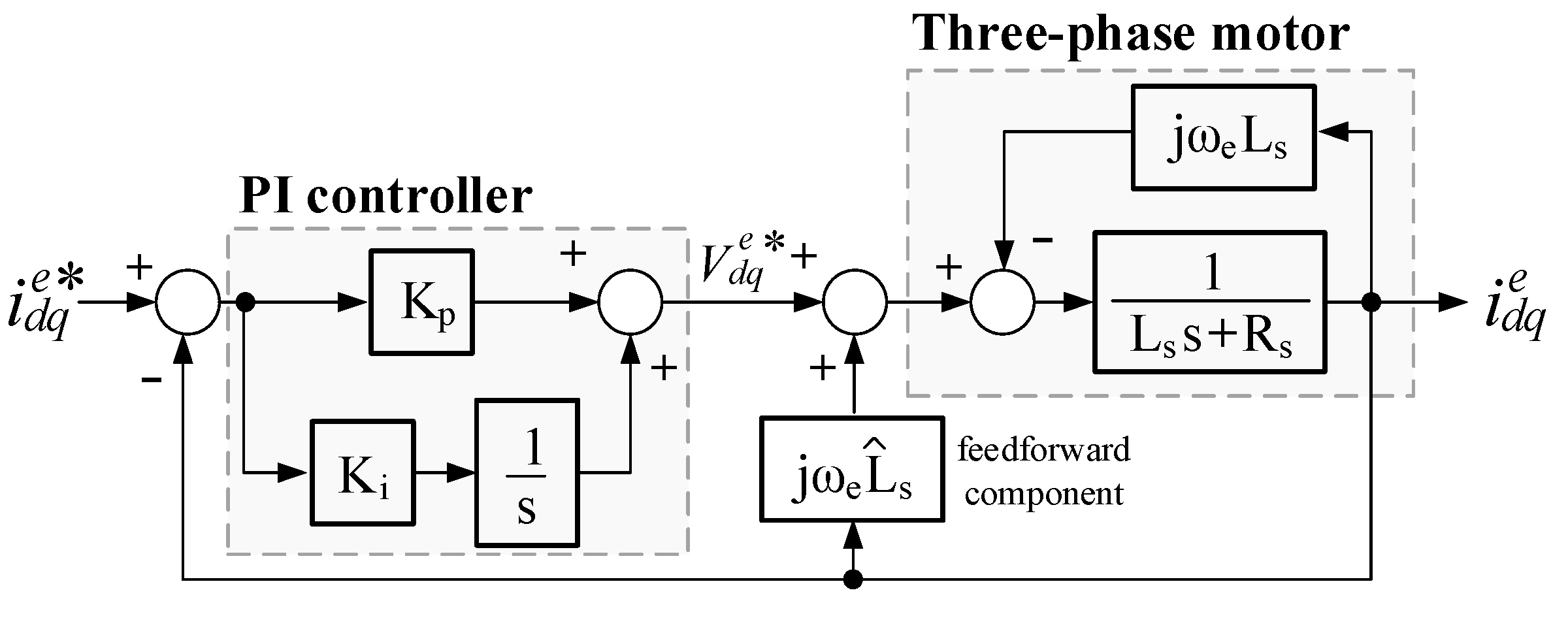
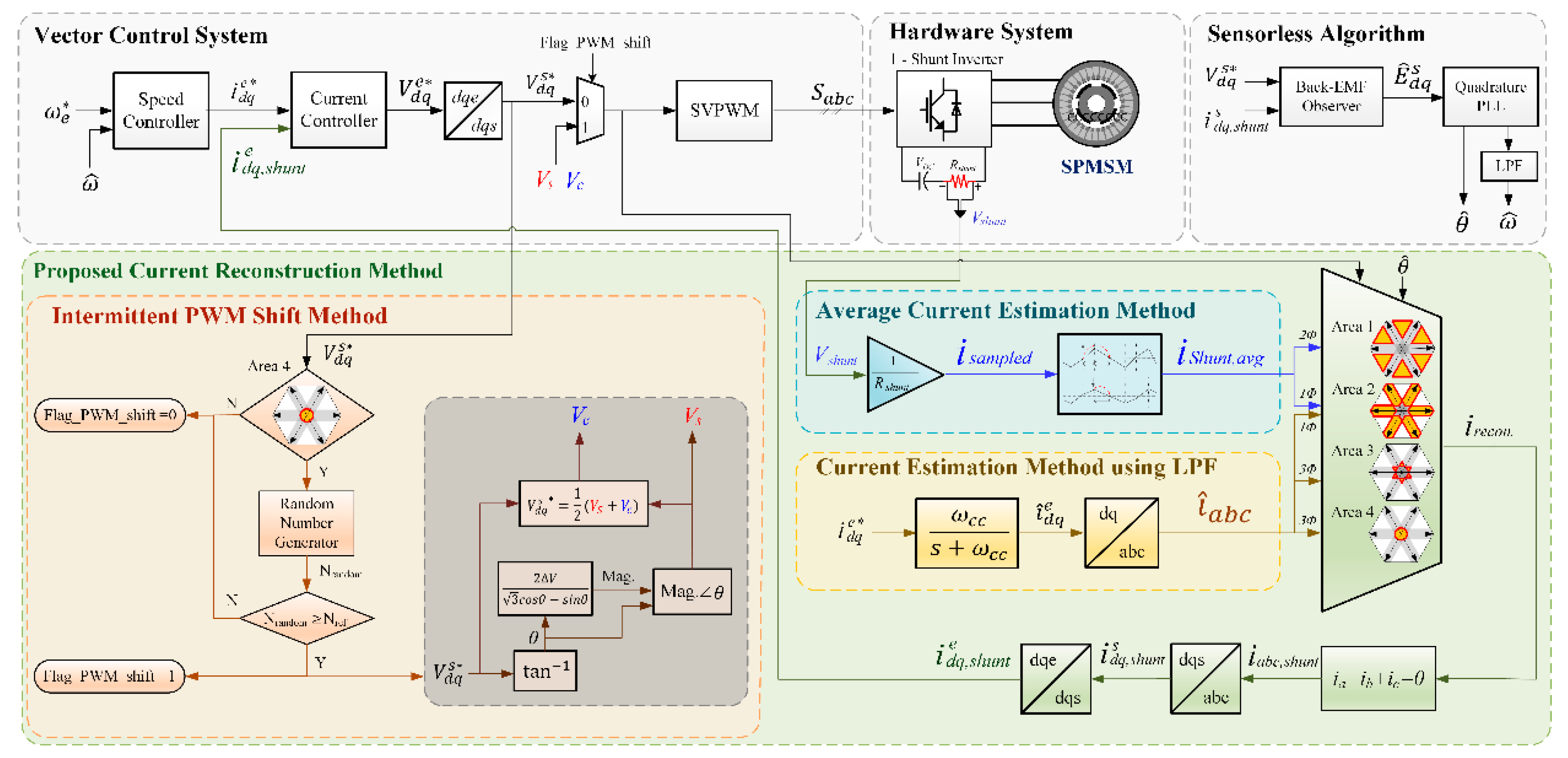
3.5. Overall Control Scheme
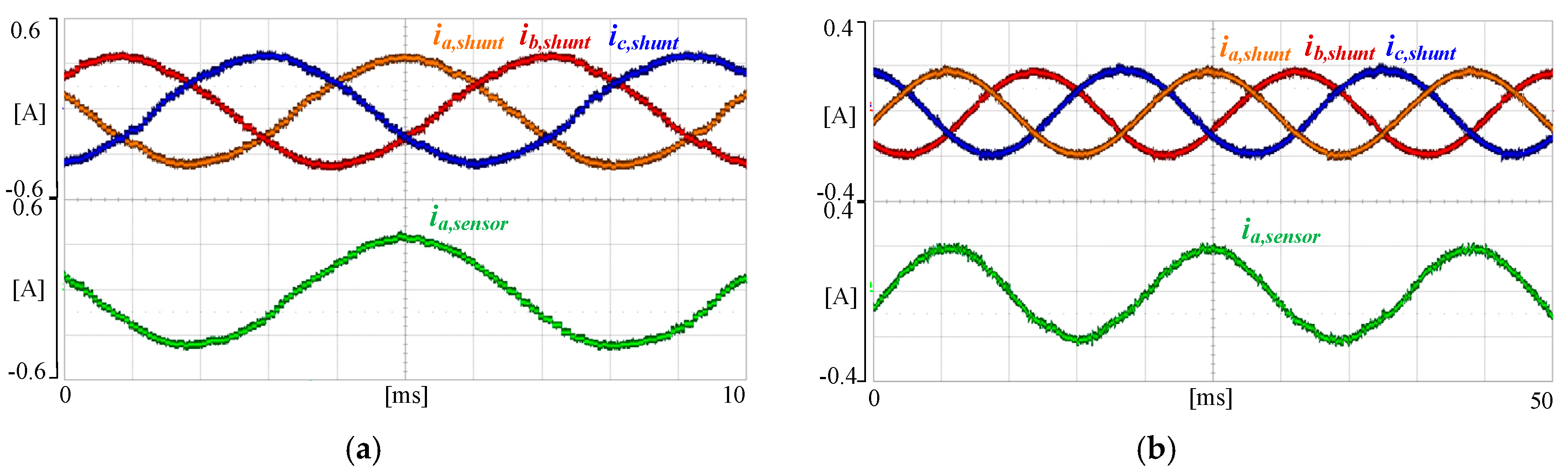
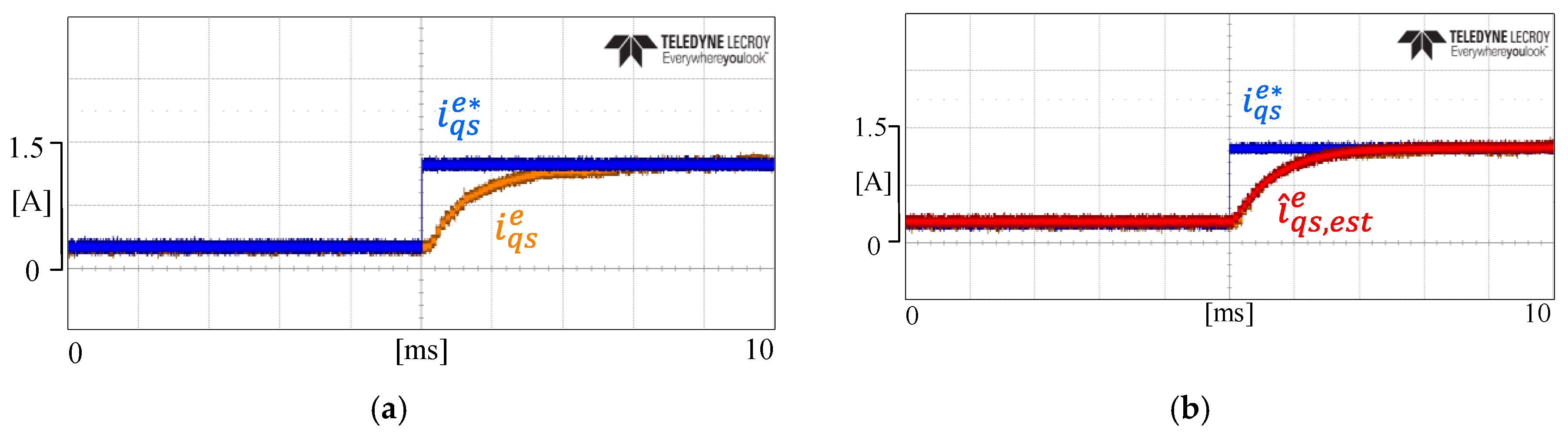
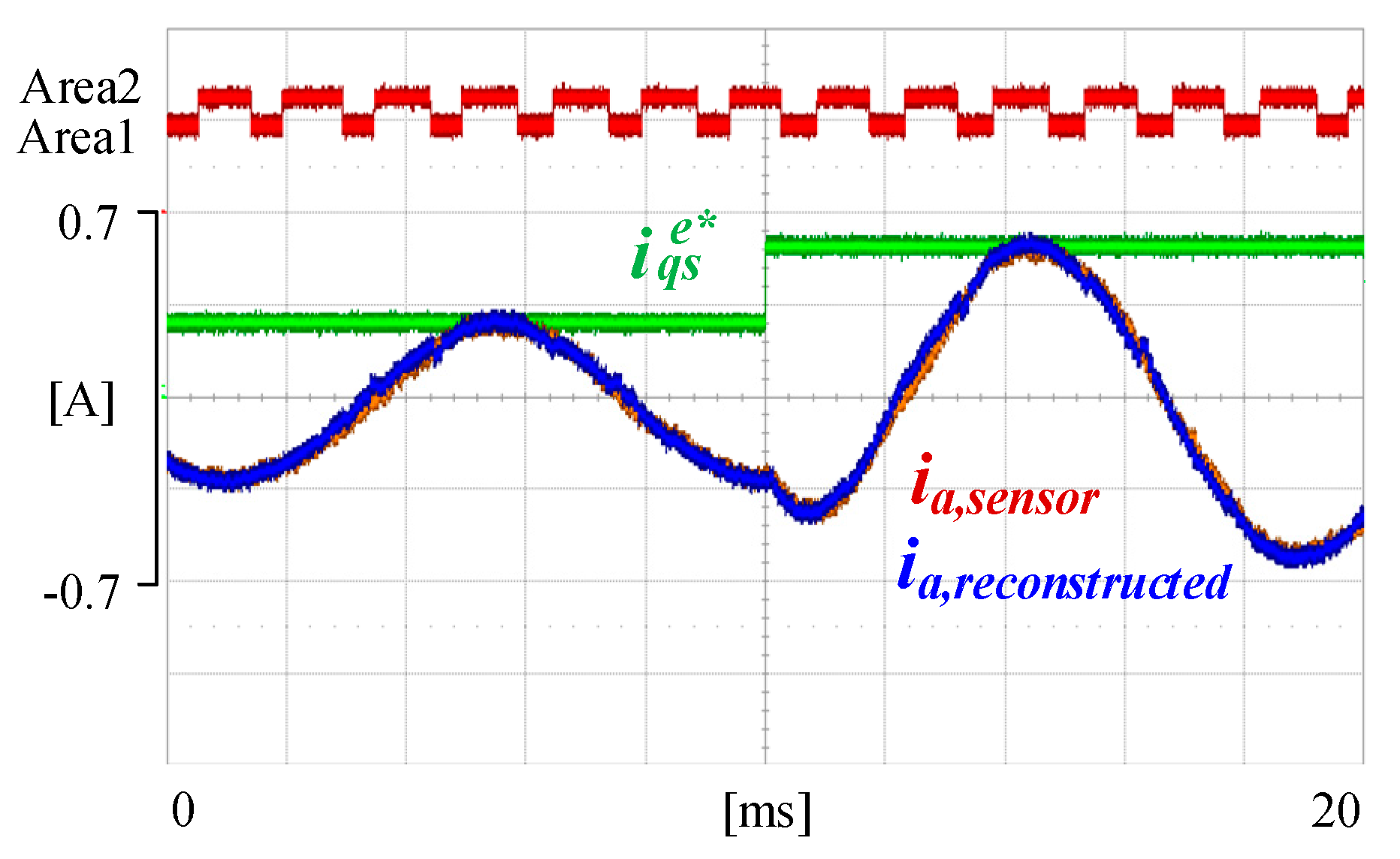
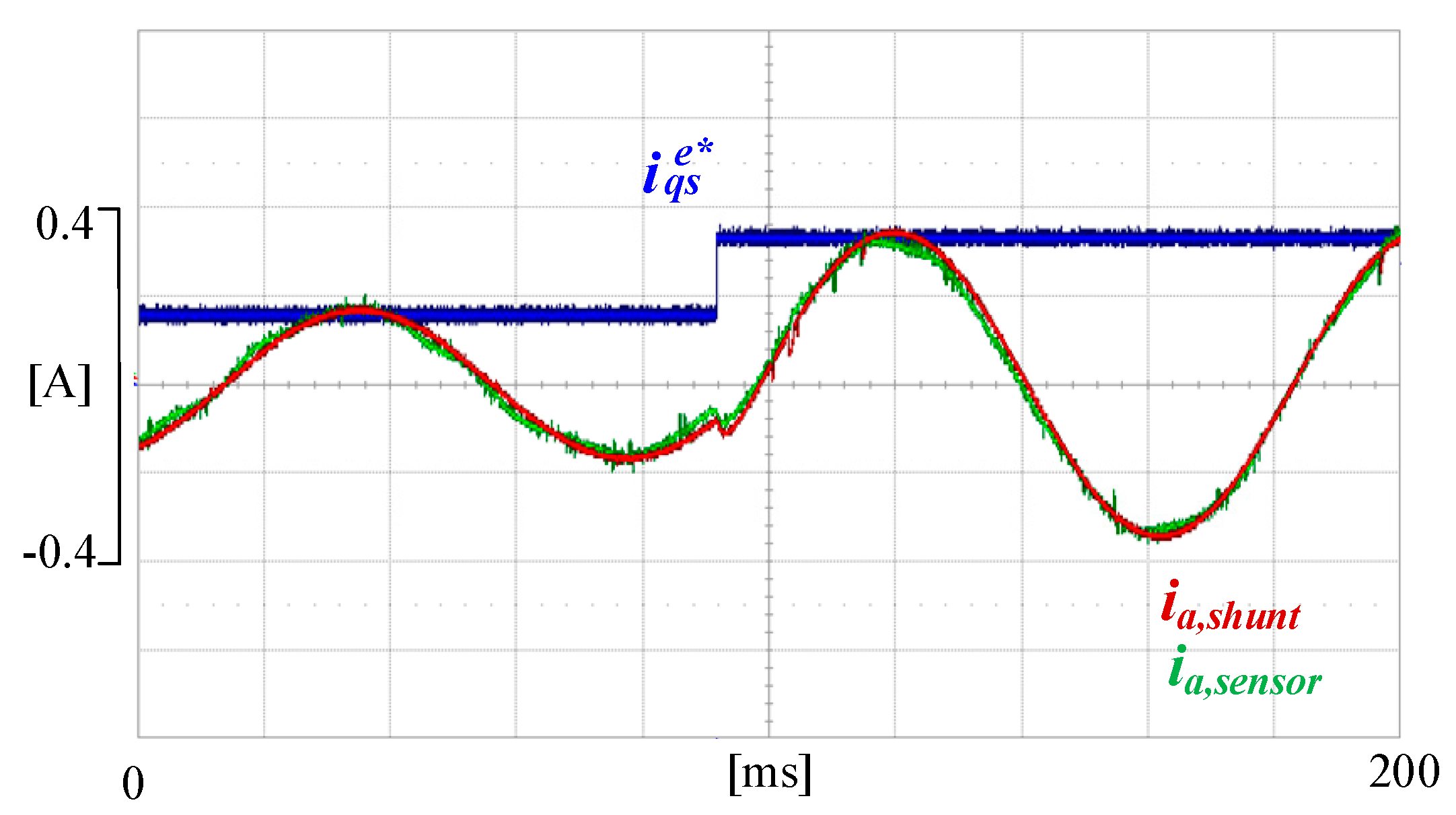
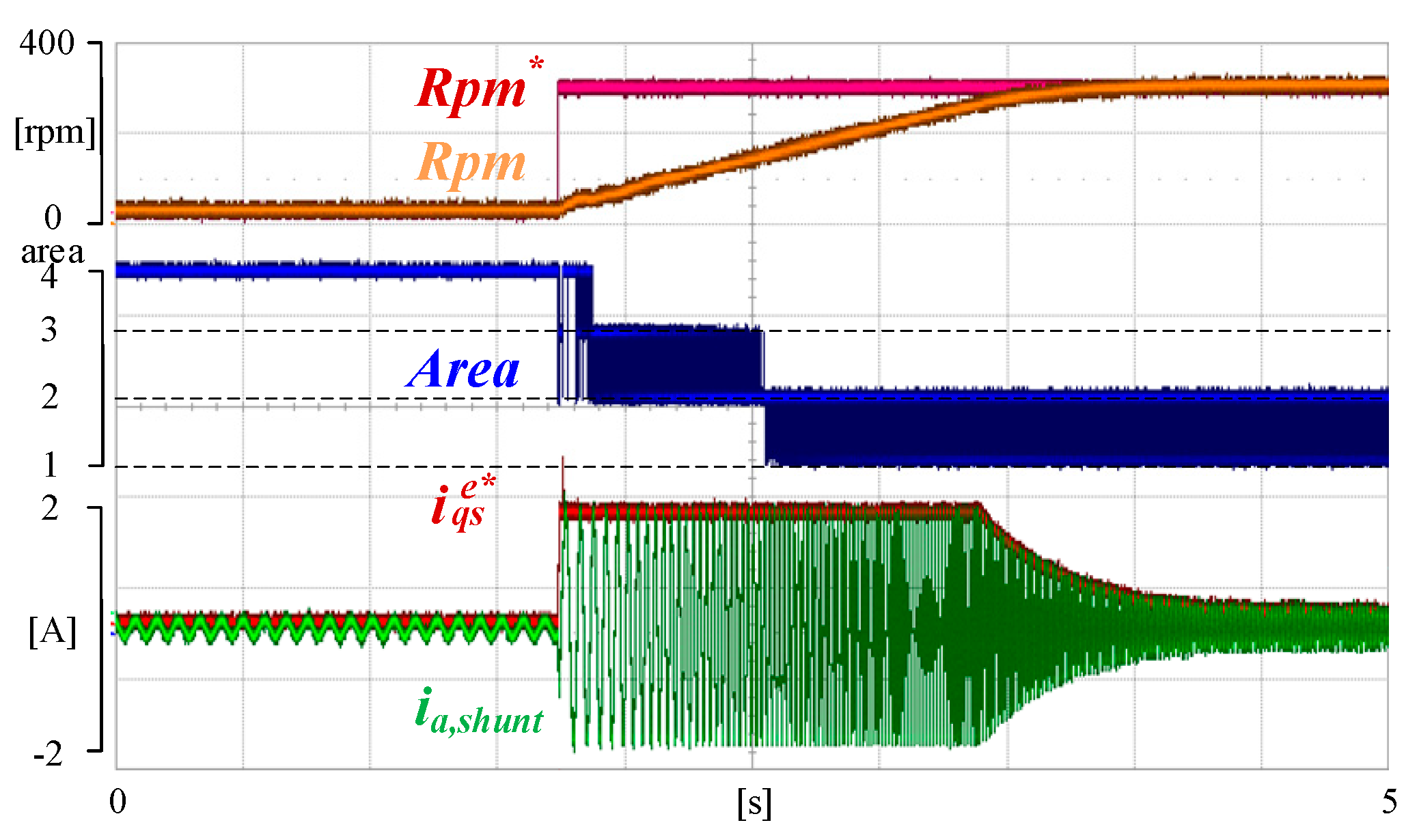
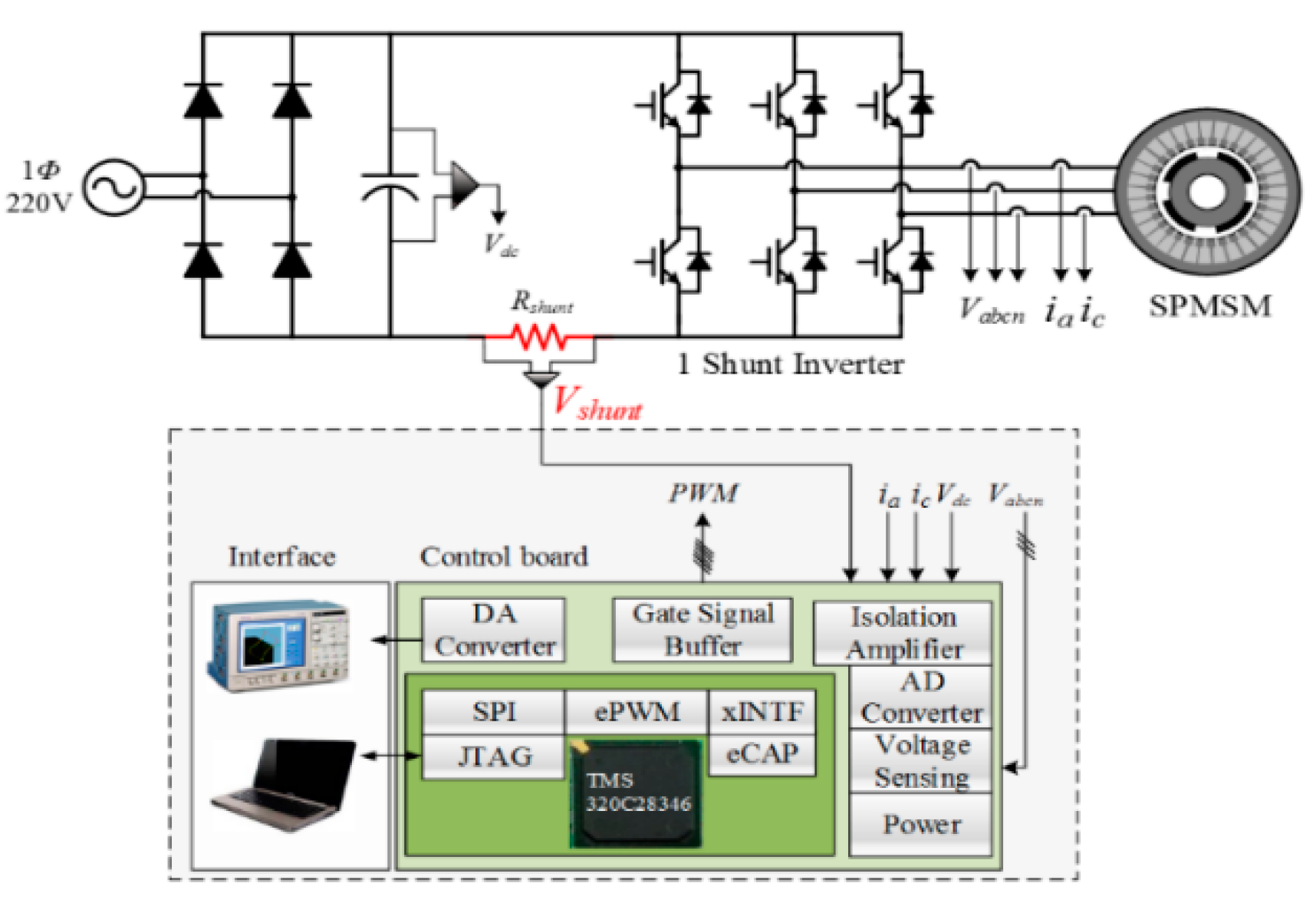
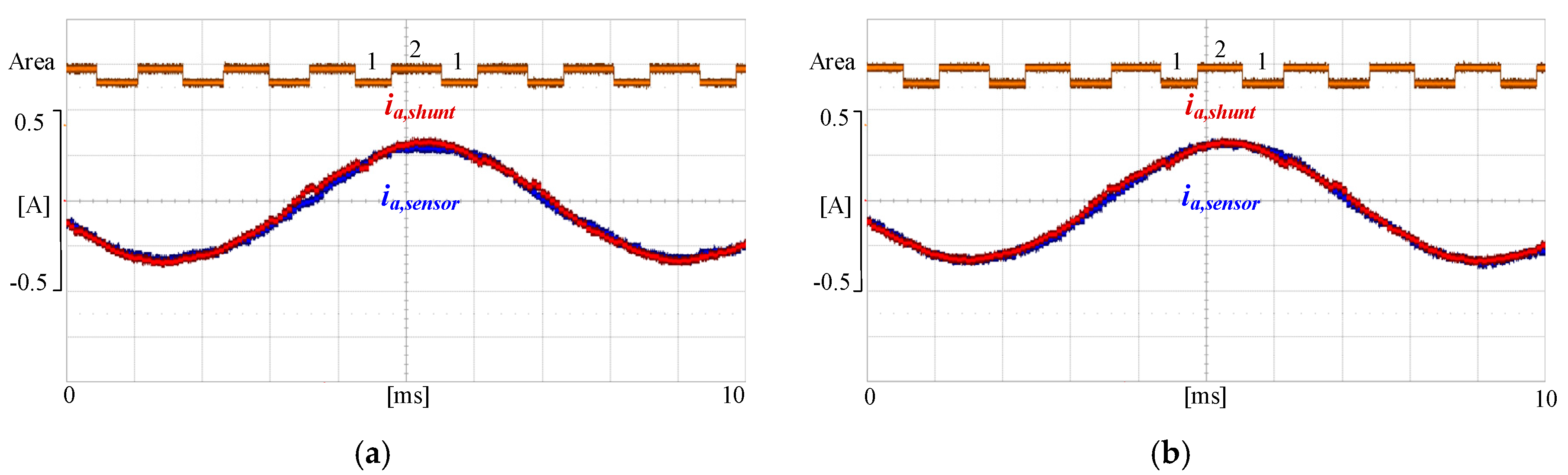
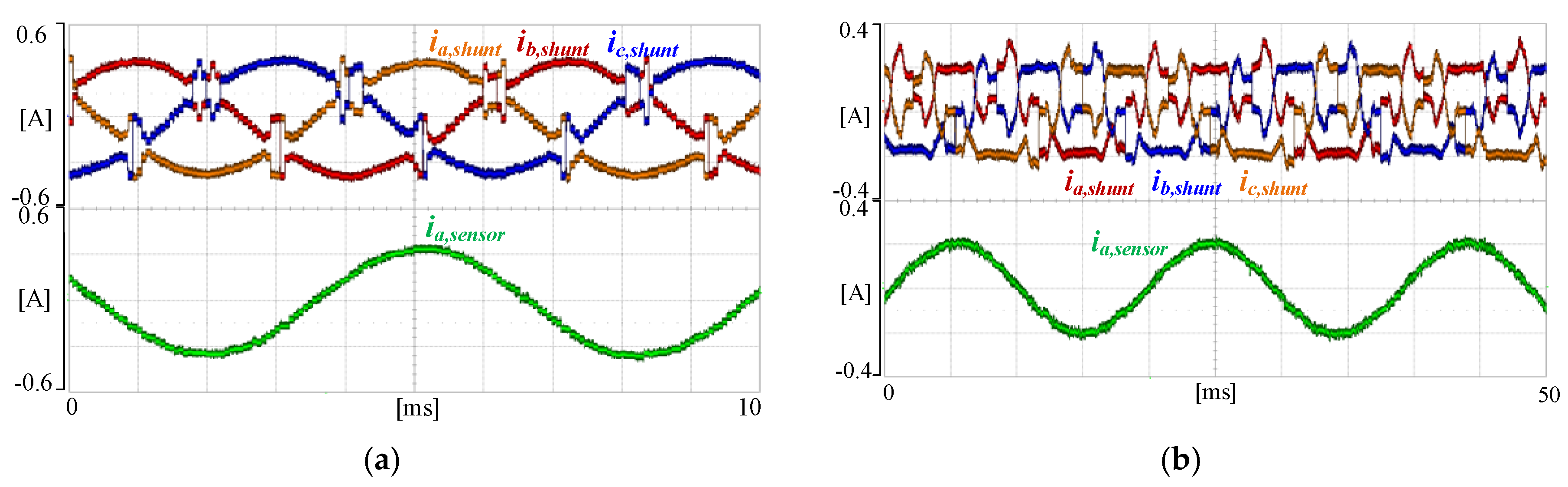
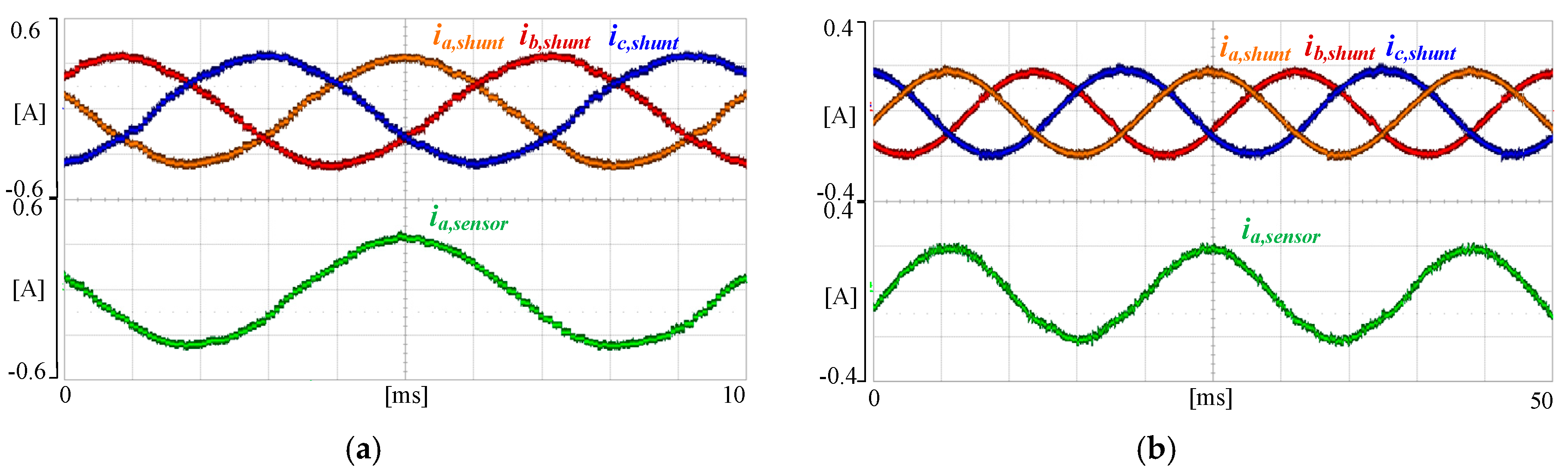
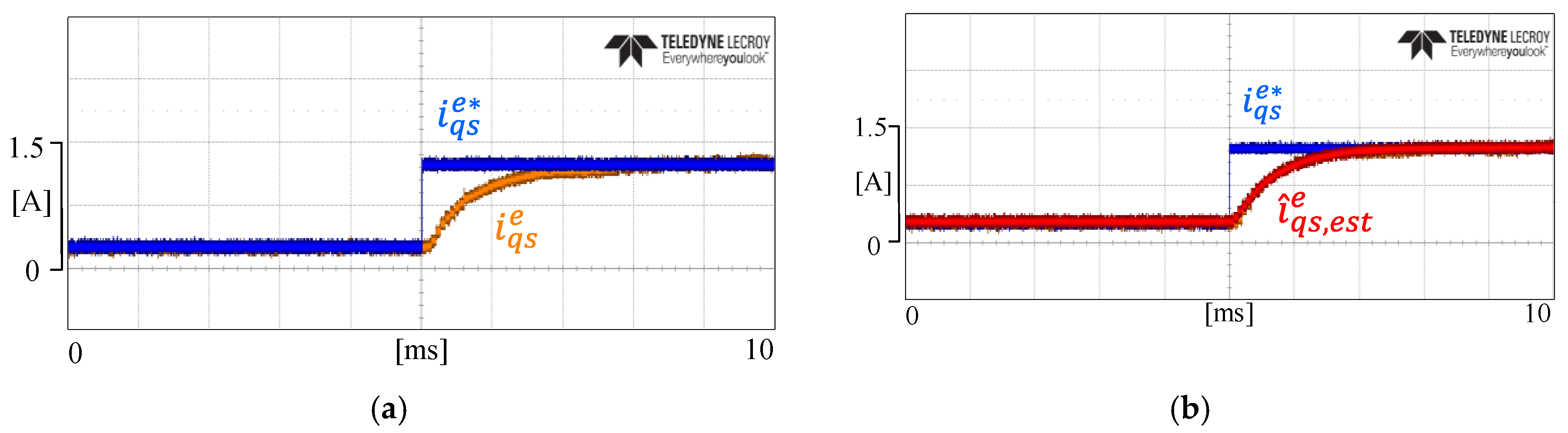
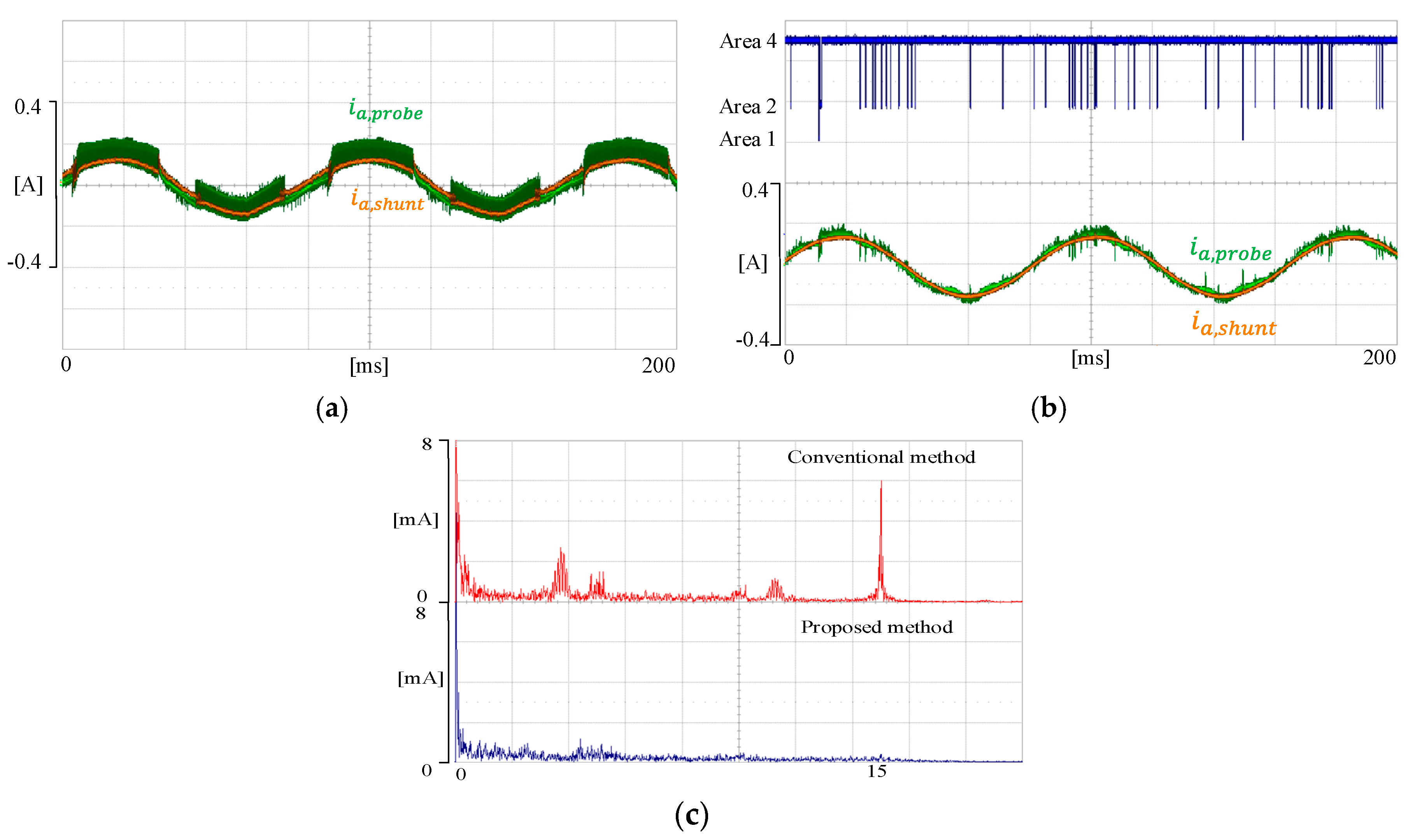
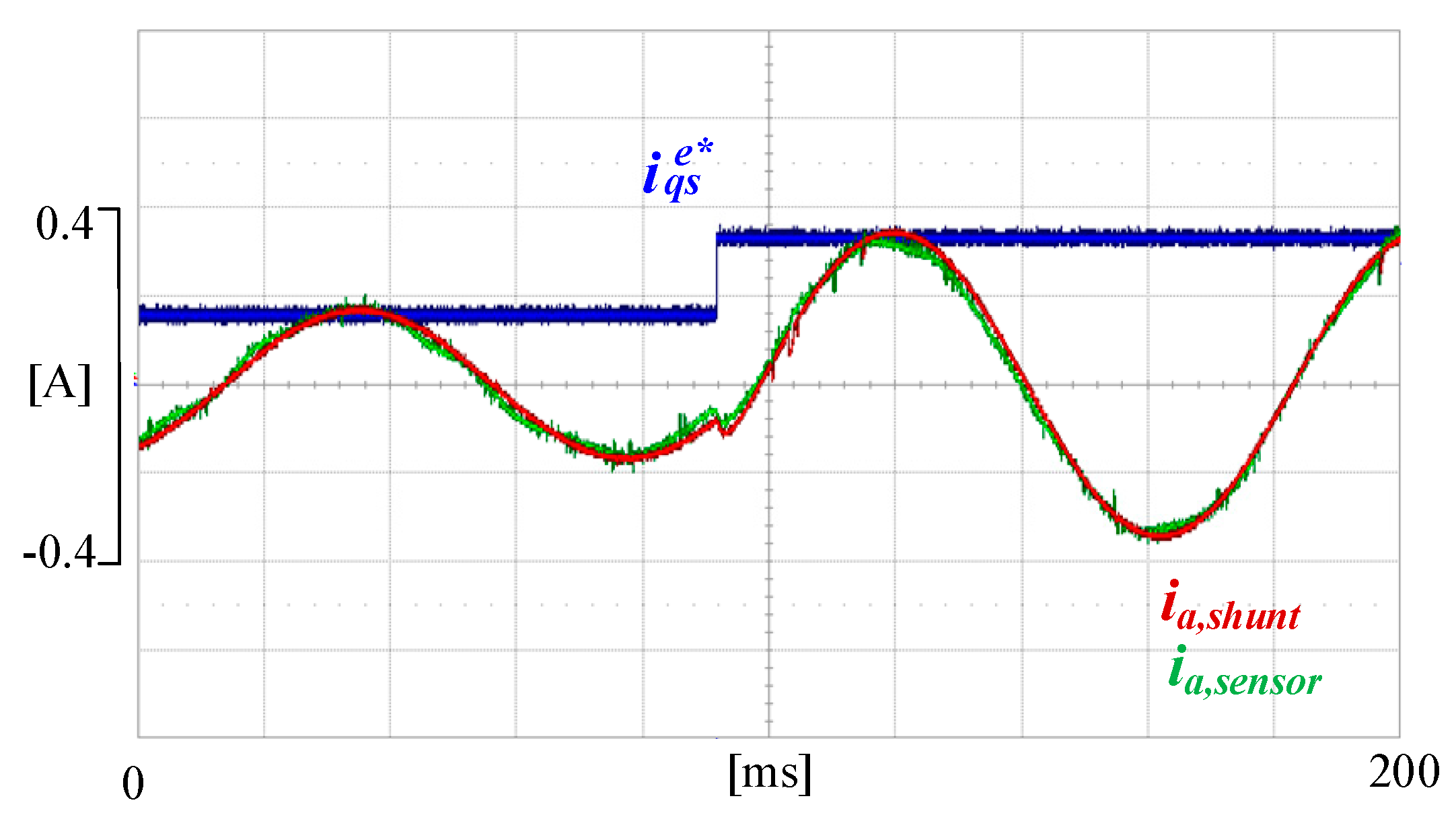
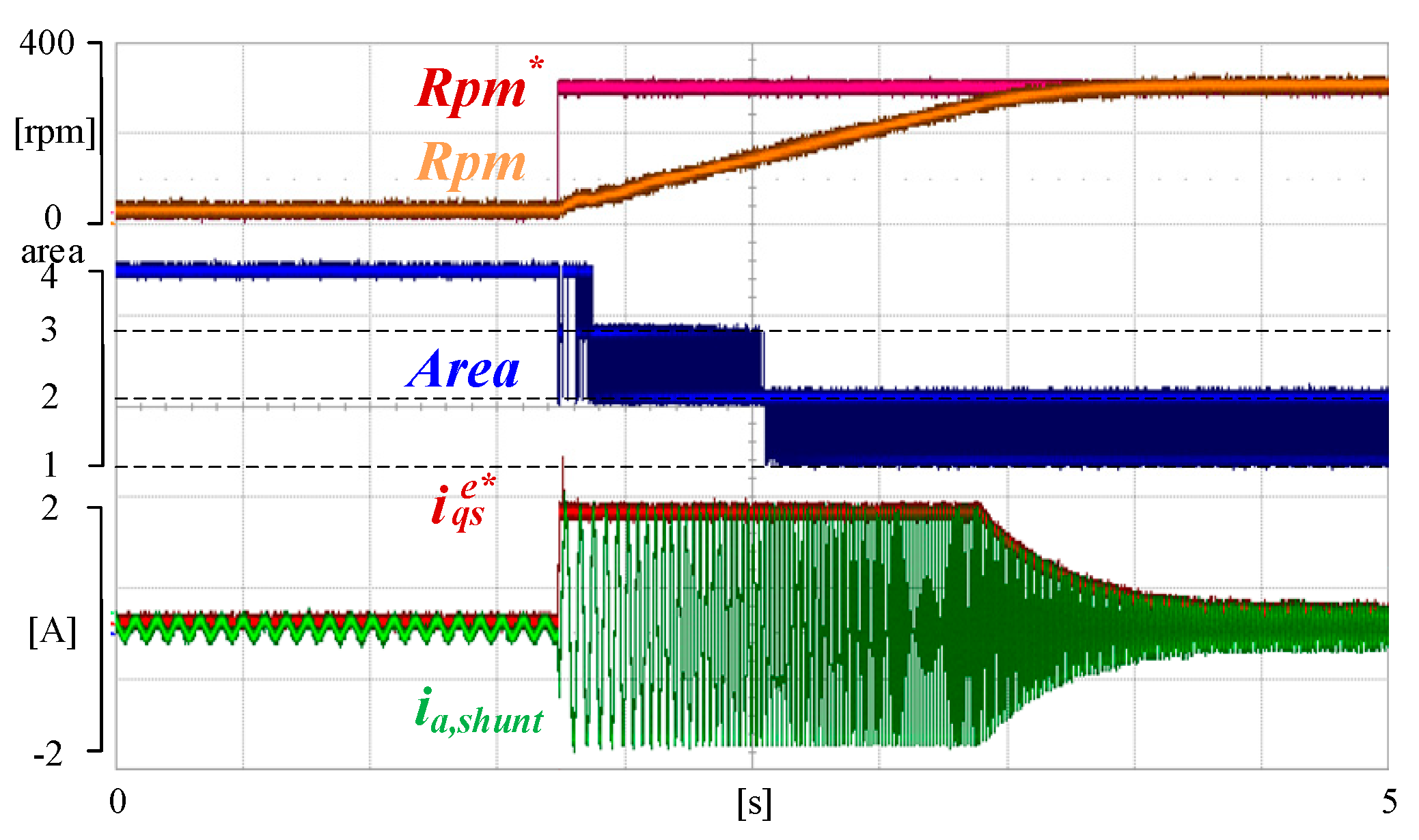
4. Experimental Results
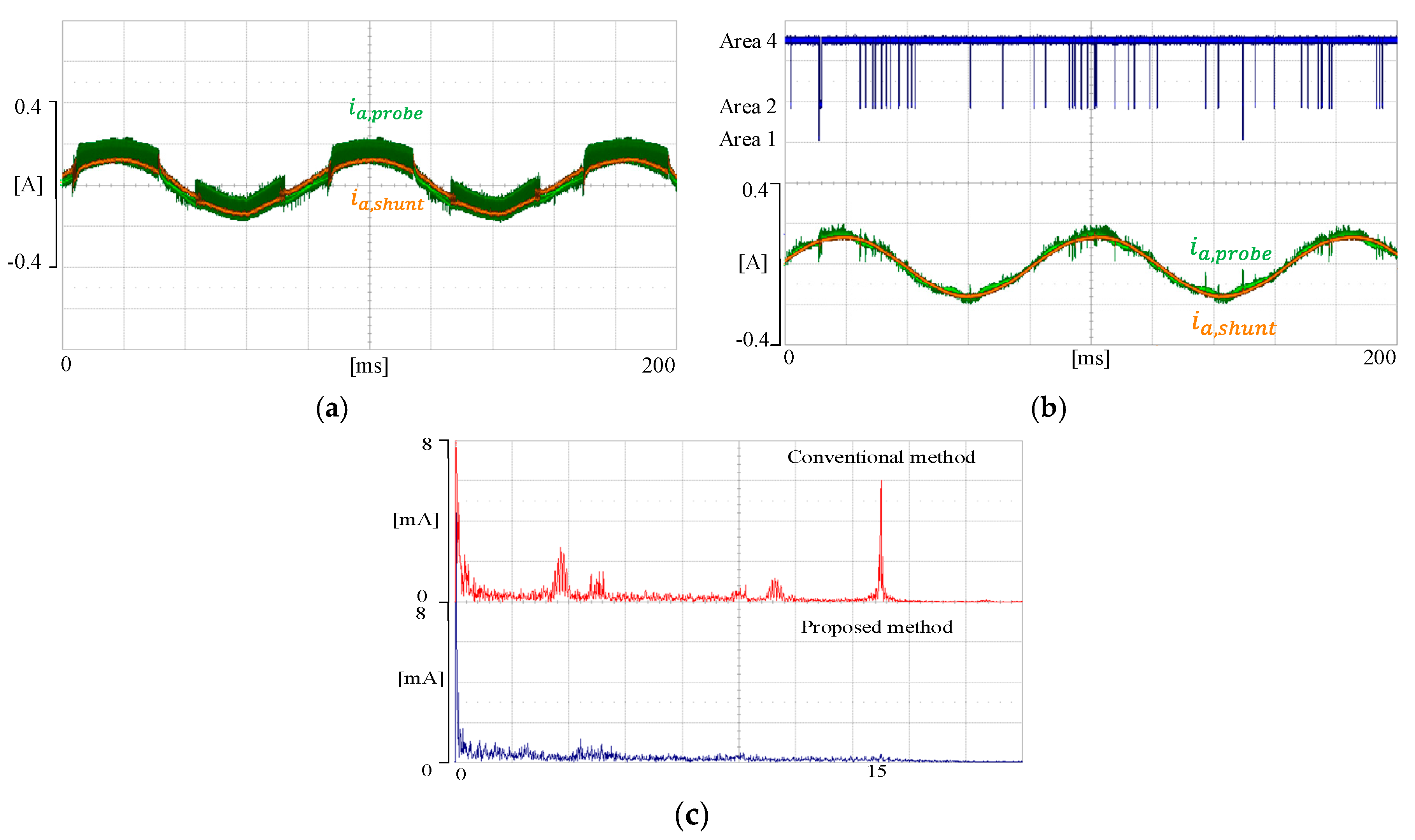
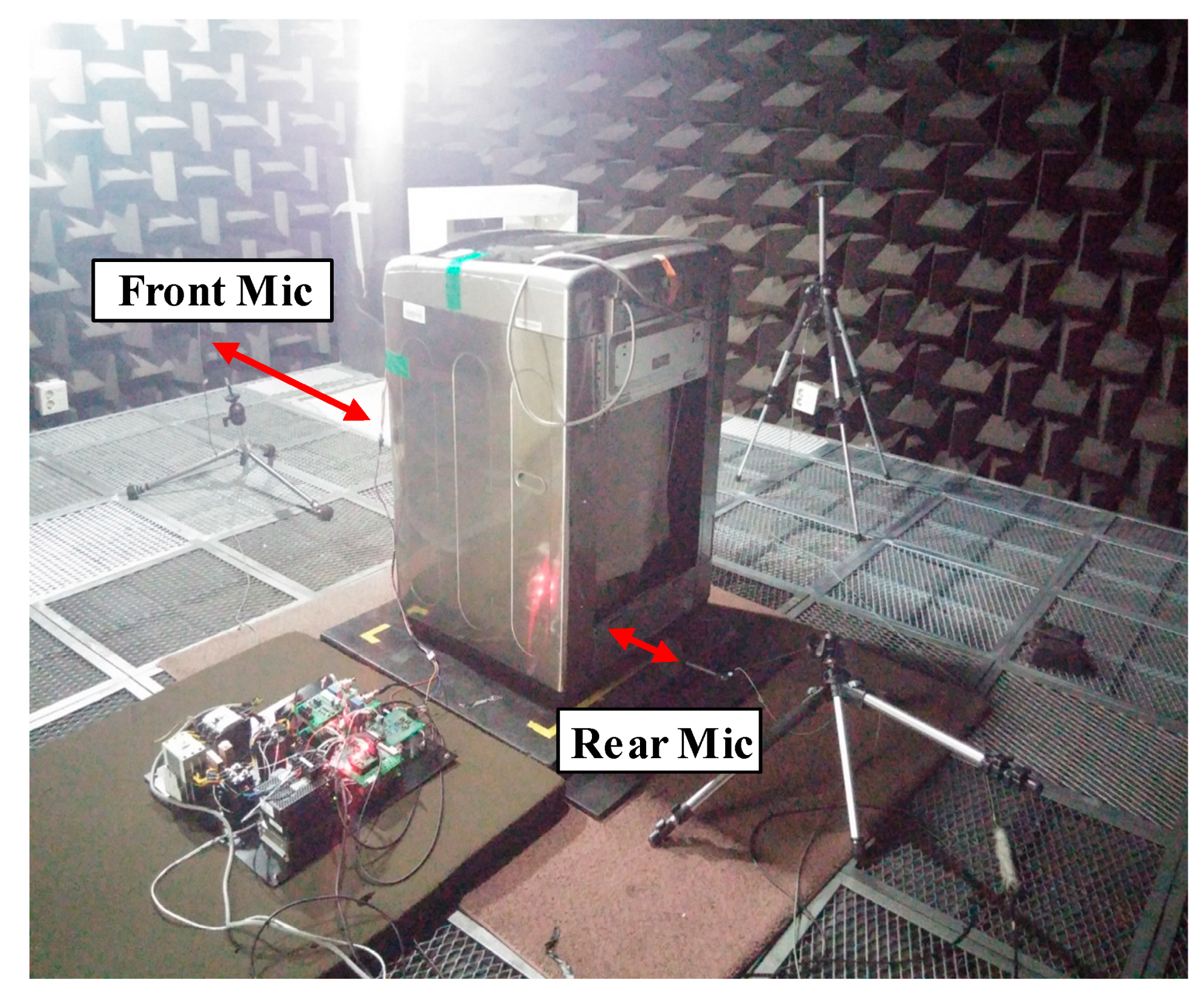
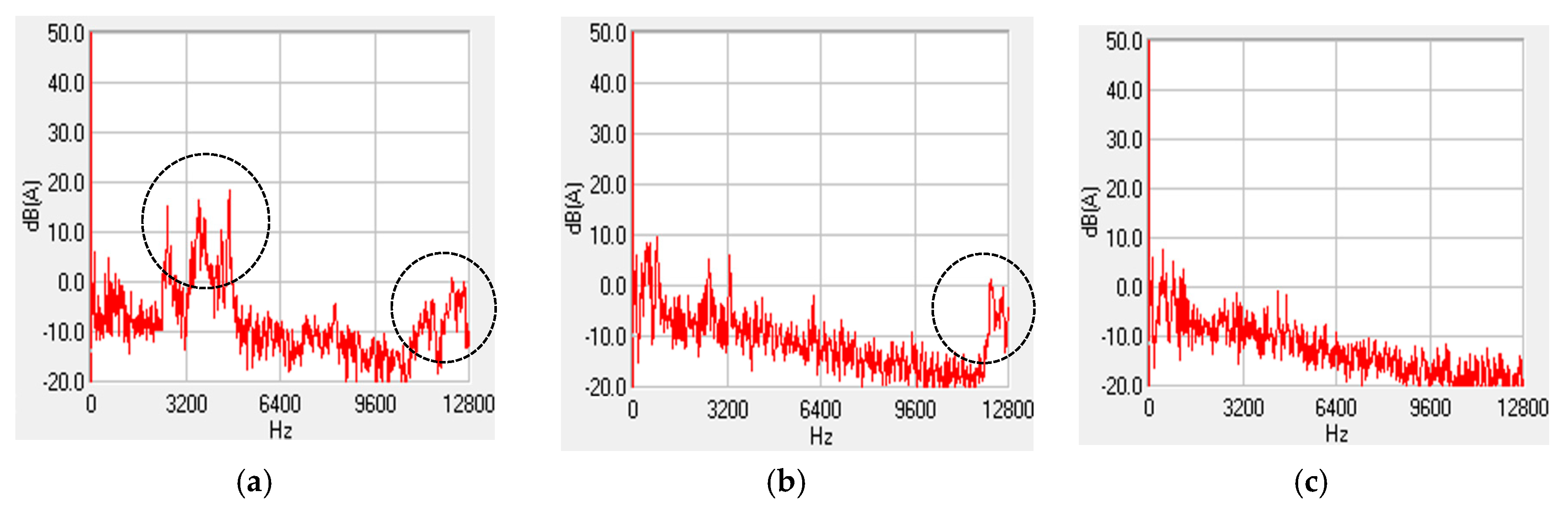
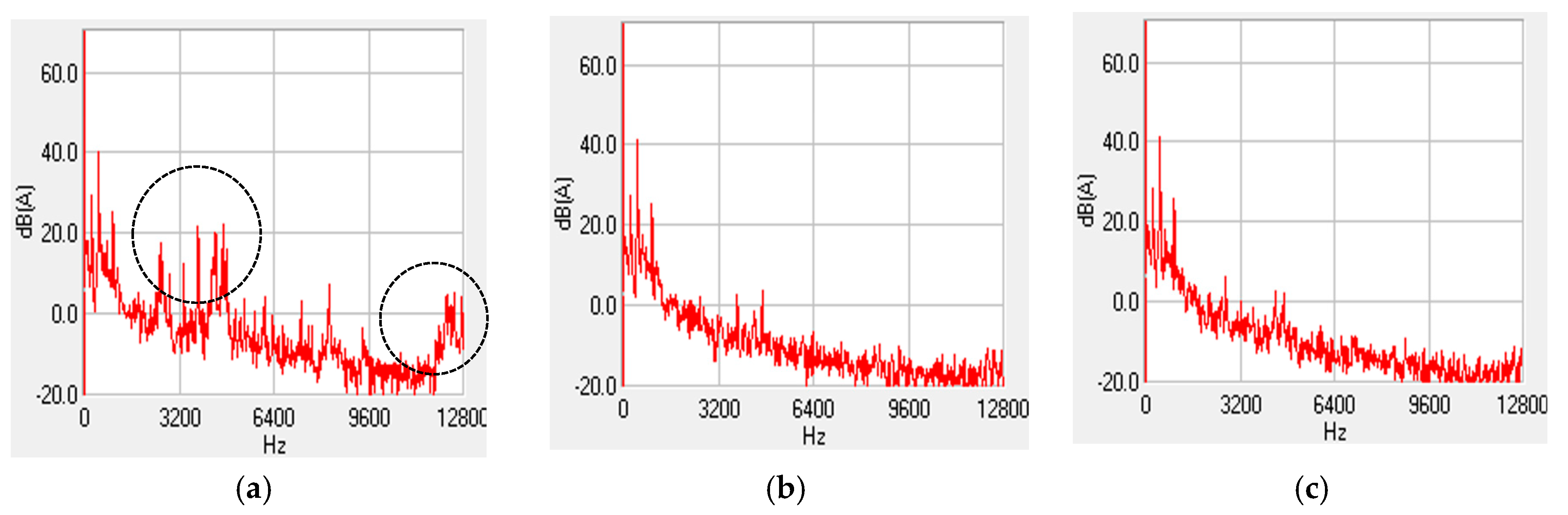
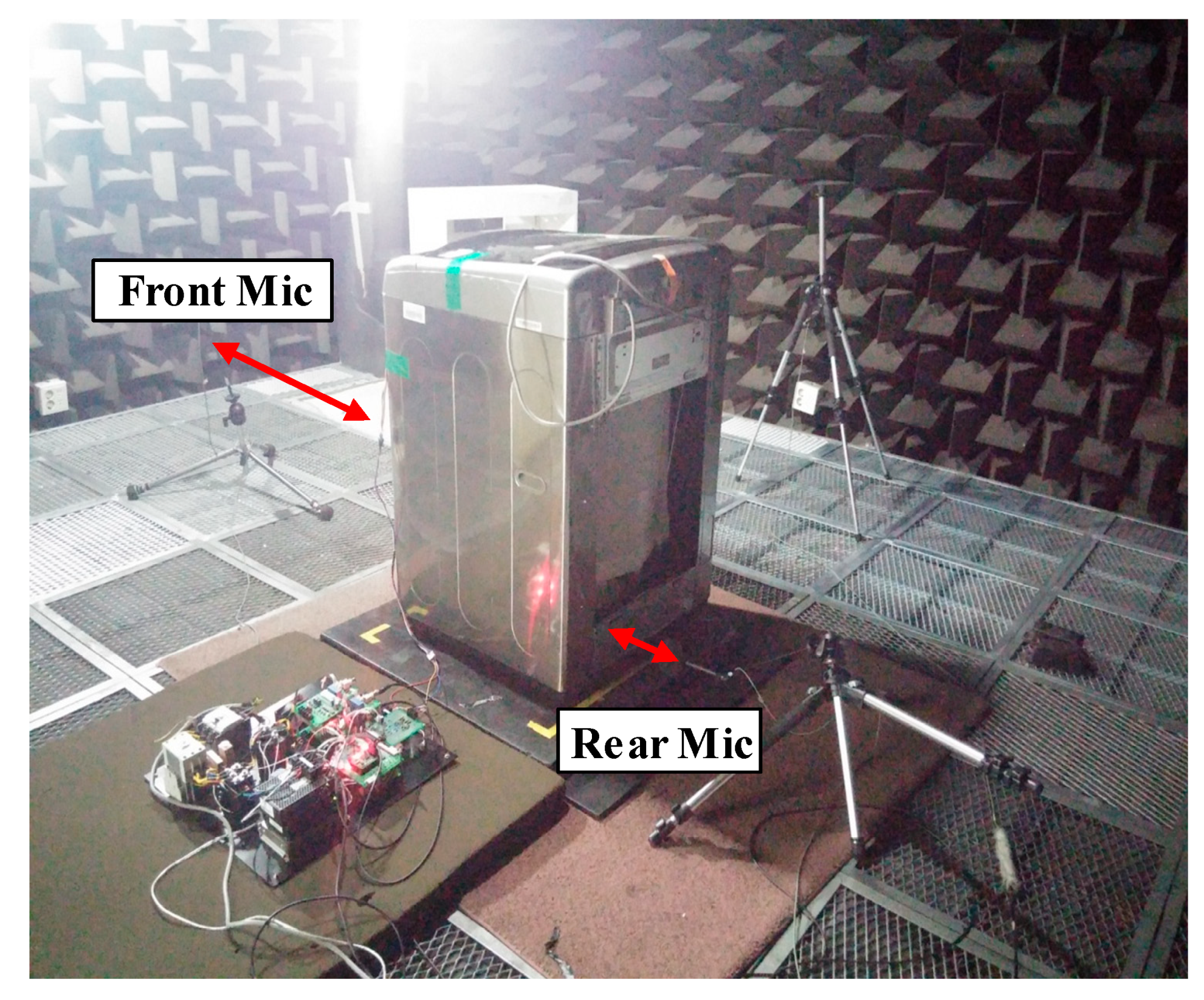
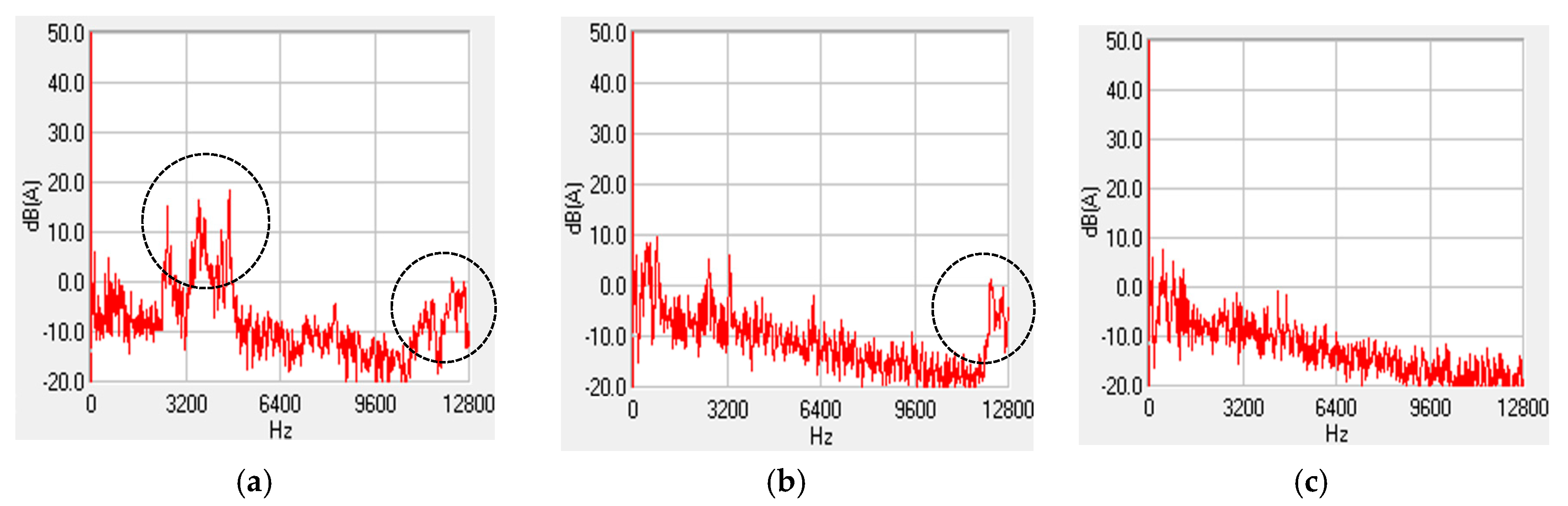
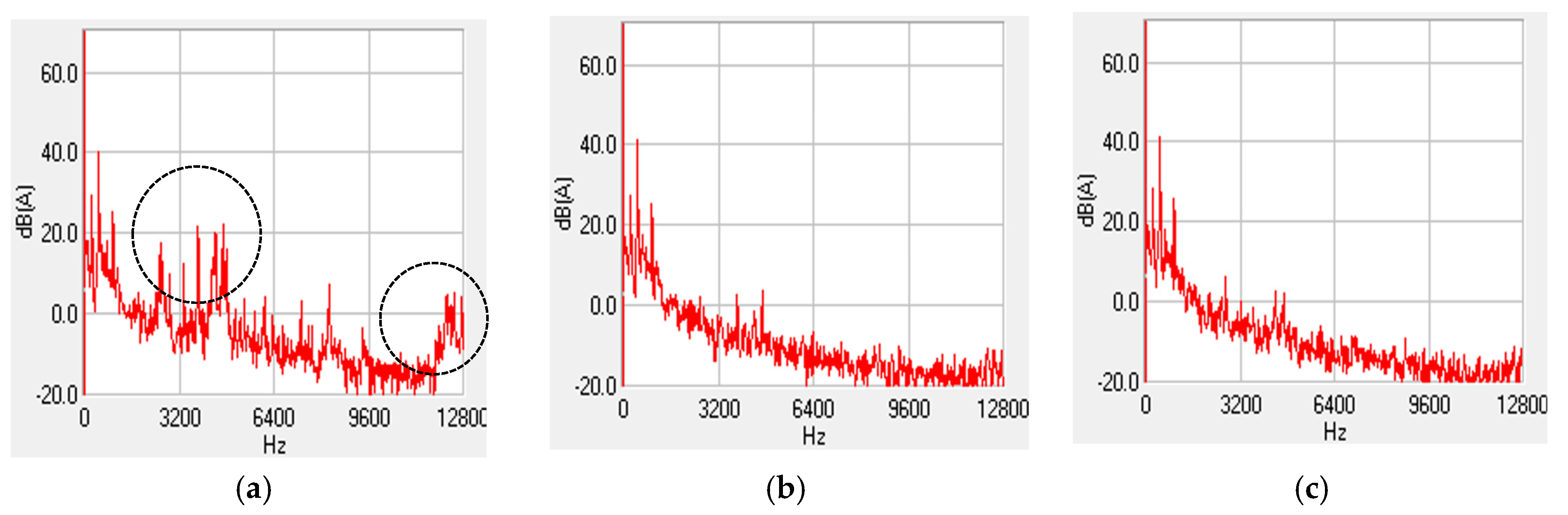
5. Measurement of the Acoustic Noise
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cho, B.G.; Ha, J.I.; Sul, S.K. Voltage Injection Method for Boundary Expansion of Output Voltages in Three Shunt Sensing PWM Inverters. In Proceedings of the 8th International Conference on Power Electronics-ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 411–415. [Google Scholar]
- Nannan, Z.; Bihe, Y.; Jiangbo, Q.; Gaolin, W.; Guoijiang, Z.; Diangu, X. Three-Phase Current Reconstruction Applying Constant Power Voltage Injection Method Using Three Shunt Resistors. In Proceedings of the 8th IEEE International Power Electronics and Motion Control Conference, Hefei, China, 22–26 May 2016. [Google Scholar]
- Jang, Y.H.; Kim, D.Y.; Ko, A.Y.; Won, I.K.; Kim, Y.R.; Won, C.Y. Three phase current reconstruction method using predictive current in three shunt sensing PWM inverter. In Proceedings of the IEEE Transportation Electrification Conference and Expo, Busan, Korea, 1–4 June 2016; pp. 436–440. [Google Scholar]
- Lee, J.S.; Im, W.S.; Kim, J.M. An over modulation method for space vector PWM inverters with dc-link shunt resistor. In Proceedings of the 8th International Conference on Power Electronics-ECCE-Asia, Jeju, Korea, 30 May–3 June 2011; pp. 1997–2004. [Google Scholar]
- Gu, Y.; Ni, F.; Yang, D.; Liu, H. Switching-State Phase Shift Method for Three-Phase-Current Reconstruction with a Single DC-Link Current Sensor. IEEE Trans. Ind. Electron. 2011, 58, 5186–5194. [Google Scholar]
- Lee, W.C.; Hyun, D.S.; Lee, T.K. A Novel Control Method for Three-Phase PWM Rectifiers Using a Single Current Sensor. IEEE Trans. Power Electron. 2000, 15, 861–870. [Google Scholar]
- Ha, J.I. Voltage Injection Method for Three-Phase Current Reconstruction in PWM Inverters Using a Single Sensor. IEEE Trans. Power Electron. 2009, 24, 767–775. [Google Scholar]
- Blaabjerg, F.; Pedersen, J.K. An ideal PWM-VSI inverter using only one current sensor in the DC-link. In Proceedings of the Fifth International Conference on Power Electronics and Variable-Speed Drives, London, UK, 26–28 October 1994; pp. 458–464. [Google Scholar]
- Haifeng, L.; Xiaomeng, C.; Wenlong, Q.; Shuang, S.; Yituo, L.; Zhengyu, W. A Three-Phase Current Reconstruction Technique Using Single DC Current Sensor Based on TSPWM. IEEE Trans. Power Electron. 2014, 29, 1542–1550. [Google Scholar] [CrossRef]
- Simeng, X.; Chong, C. Random PWM Technique Based Induction Motor Phase Current Reconstruction from DC-link Current of Inverters. In Proceedings of the 5th IEEE Conference on Industrial Electronics and Application, Taichung, Taiwan, 15–17 June 2010; pp. 749–752. [Google Scholar]
- Lin, Y.K.; Lai, Y.S. PWM Technique to Extend Current Reconstruction Range and Reduce Common-Mode Voltage for Three-Phase Inverter using DC-link Current Sensor Only. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 1978–1985. [Google Scholar]
- Moynihan, J.F.; Bolognani, S.; Kavanagh, R.C.; Egan, M.G.; Murphy, J.M.D. Single sensor current control of AC servo drives using digital signal processors. In Proceedings of the Fifth European Conference on Power Electronics and Applications, Brighton, UK, 13–16 September 1993; pp. 415–421. [Google Scholar]
- Li, Y.; Nesimi, E. An Observer-Based Three-Phase Current Reconstruction using DC Link Measurement in PMAC Motors. In Proceedings of the CES/IEEE 5th International Power Electronics and Motion Control Conference, Shanghai, China, 14–16 August 2016; pp. 1–5. [Google Scholar]
- Saritha, B.; Janakiraman, P.A. Sinusoidal Three-Phase Current Reconstruction and Control Using a DC-Link Current Sensor and a Curve-Fitting Observer. IEEE Trans. Ind. Electron. 2006, 54, 2657–2664. [Google Scholar] [CrossRef]
- Xu, Y.; Yan, H.; Zou, J.; Wang, B.; Li, Y. Zero Voltage Vector Sampling Method for PMSM Three-Phase Current Reconstruction Using Single Current Sensor. IEEE Trans. Power Electron. 2016, 32, 3797–3807. [Google Scholar] [CrossRef]
- Yan, H.; Xu, Y.; Zou, J. A phase Current Reconstruction Approach for Three-Phase Permanent-Magnet Synchronous Motor Drive. Energies 2016, 9, 853. [Google Scholar] [CrossRef]
- Kim, K.S.; Yeom, H.B.; Ku, H.K.; Kim, J.M. Current reconstruction method with single DC-link sensor based on the PWM inverter and AC motor. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 250–256. [Google Scholar]
- Chun, D.-W.; Kim, J.-S.; Sul, S.-K. Unified voltage modulation technique for real-time three-phase power conversion. IEEE Trans. Ind. Appl. 1998, 34, 374–380. [Google Scholar] [CrossRef]
- Yeom, H.B.; Ku, H.K.; Kim, J.M. Current Reconstruction Method for PMSM Drive System with a DC Link Shunt Resistor. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–6. [Google Scholar]
- Briz, F.; Degner, M.W.; Lorenz, R.D. Dynamic Analysis of Current Regulators for AC Motors Using Complex Vectors. IEEE Trans. Ind. Appl. 1999, 35, 1424–1432. [Google Scholar] [CrossRef]
- Sul, S.K. Control of Electric Machine Drive Systems; Wiley: New York, NY, USA, 2011; pp. 173–175. [Google Scholar]
- Silverio, B. Design Issues and Estimation Errors Analysis of Back-EMF-Based Position and Speed Observer for SPM Synchronous Motors. IEEE Trans. Power Electron. 2014, 2, 159–170. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Vector | |
|---|---|
| Switching State | Current Slope of | Current Slope of | Current Slope of |
|---|---|---|---|
| 310 [V] | Poles | 48 | |
| 66.67 [us] | 5.9 | ||
| 7 [us] | 537.5 [mH] | ||
| Rated speed | 400 [rpm] | 0.1528 [Vˑs/rad] | |
| Rated power | 430 [W] | 0.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, C.-H.; Kim, D.-Y.; Yeom, H.-B.; Son, Y.-D.; Kim, J.-M. A Current Reconstruction Strategy Following the Operation Area in a 1-Shunt Inverter System. Energies 2019, 12, 1423. https://doi.org/10.3390/en12081423
Park C-H, Kim D-Y, Yeom H-B, Son Y-D, Kim J-M. A Current Reconstruction Strategy Following the Operation Area in a 1-Shunt Inverter System. Energies. 2019; 12(8):1423. https://doi.org/10.3390/en12081423
Chicago/Turabian StylePark, Chang-Hwan, Dong-Youn Kim, Han-Beom Yeom, Yung-Deug Son, and Jang-Mok Kim. 2019. "A Current Reconstruction Strategy Following the Operation Area in a 1-Shunt Inverter System" Energies 12, no. 8: 1423. https://doi.org/10.3390/en12081423
APA StylePark, C.-H., Kim, D.-Y., Yeom, H.-B., Son, Y.-D., & Kim, J.-M. (2019). A Current Reconstruction Strategy Following the Operation Area in a 1-Shunt Inverter System. Energies, 12(8), 1423. https://doi.org/10.3390/en12081423