Modeling and Forecasting Electric Vehicle Consumption Profiles †



Abstract
1. Introduction
1.1. Context
1.2. Objective
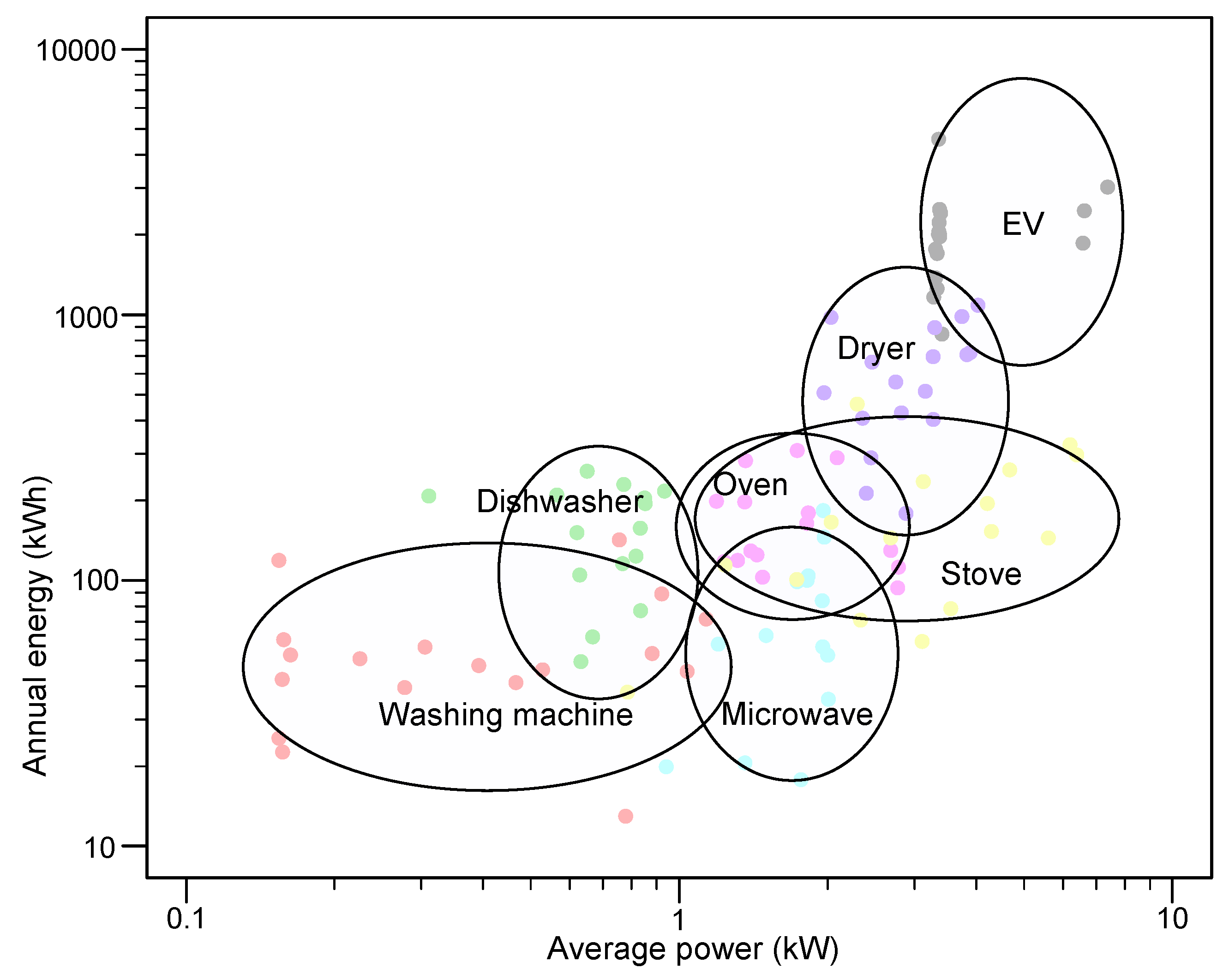
1.3. Data Description
2. The EV Charging Model
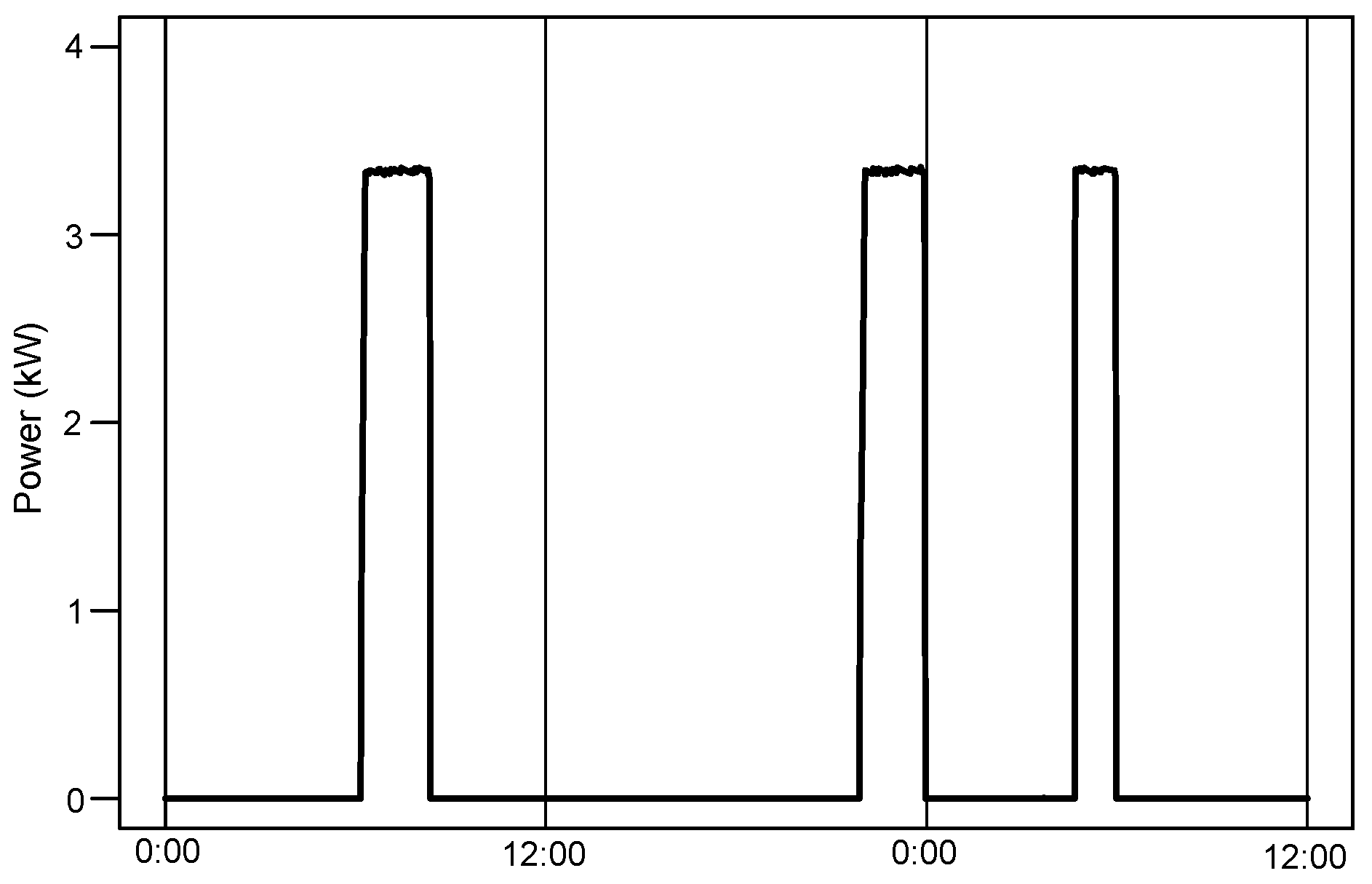
2.1. Processing the EV Time Series
- Nominal power: power demanded from the grid is constant during the whole charging period.
- Duration of the charging block.
- Start-up time: moment the day when EV charging starts (between 1 and ).
2.2. Detection of Charging Blocks
- Detecting nominal power. The density of all of the strictly positive values was estimated, and the maximum of this density function (i.e., the statistical mode) was retrieved as the nominal power.
- Transforming time series in perfect charging blocks. The raw time series was transformed into a simpler series of two values, either 0 when power was below a threshold fixed at 50% of nominal power, or 1 when it was above.
- Pre-processing the simple time series. The time series obtained was then refined to account for measurement errors. Missing values were filled in, and any remaining blocks that were too short (less than 20 min) were removed.
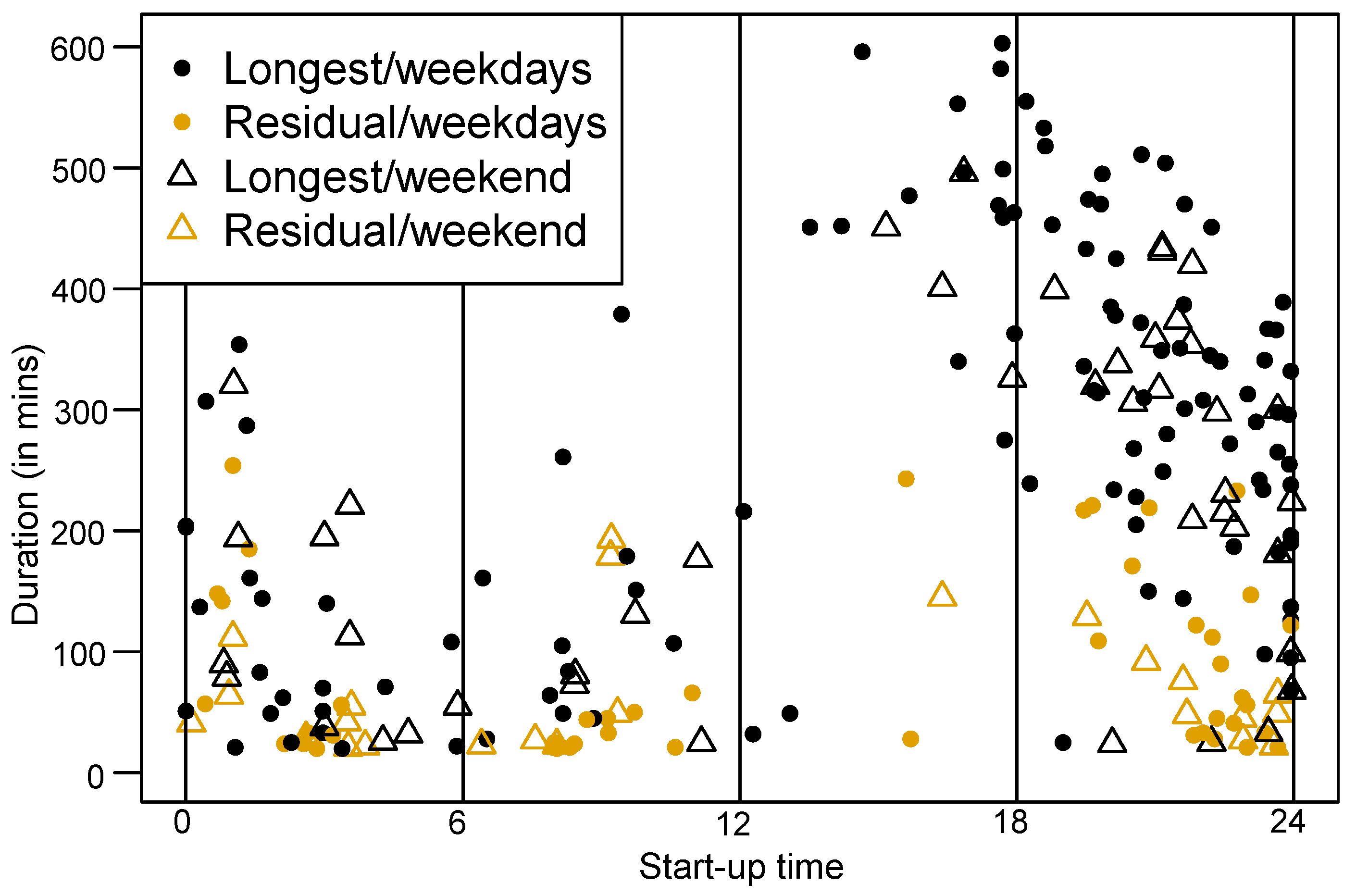
- Detecting duration and start-up time. All timestamps were processed in order to list all durations and associated start-up times in the time series. The day of the year on which the charging blocks occurred was also recorded for forecast applications.
2.3. Charging Habit Analysis
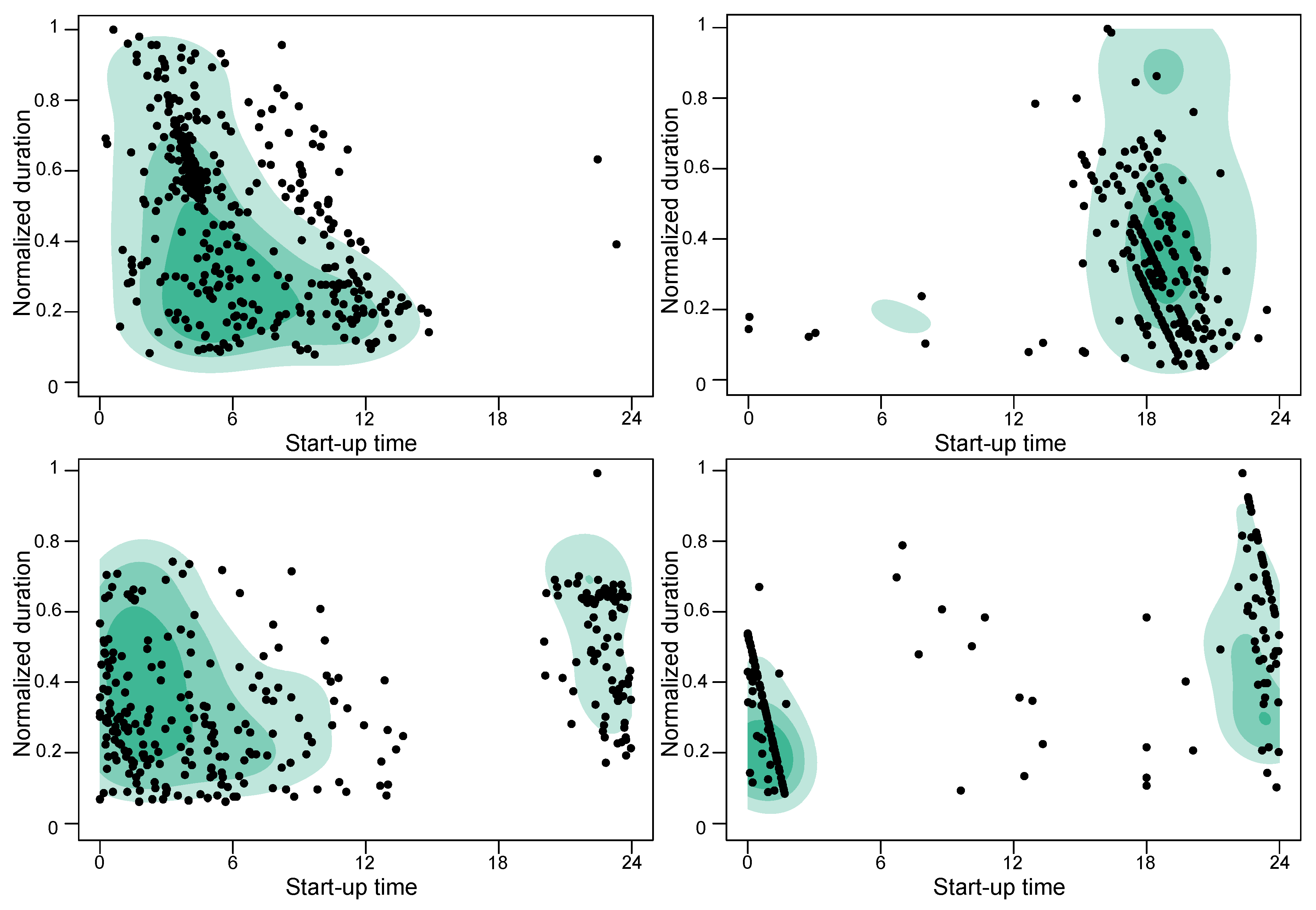
2.4. Charging Habits Clustering
3. Day-Ahead Forecasting Scenarios of Daily Consumption Profiles
3.1. Scenarios of a Single EV
- Forecast number of charging blocks for the next day;
- Forecast possible patterns (normalized duration × start-up time) for each block;
- Use of characteristics of the EV (maximal duration and nominal power) to obtain a consumption profile.
3.2. Bottom-Up Forecast of the Aggregated Fleet
- Compute the negative gradient for
- Fit a regression tree forecasting ;
- Choose a gradient step
- Update estimation, for
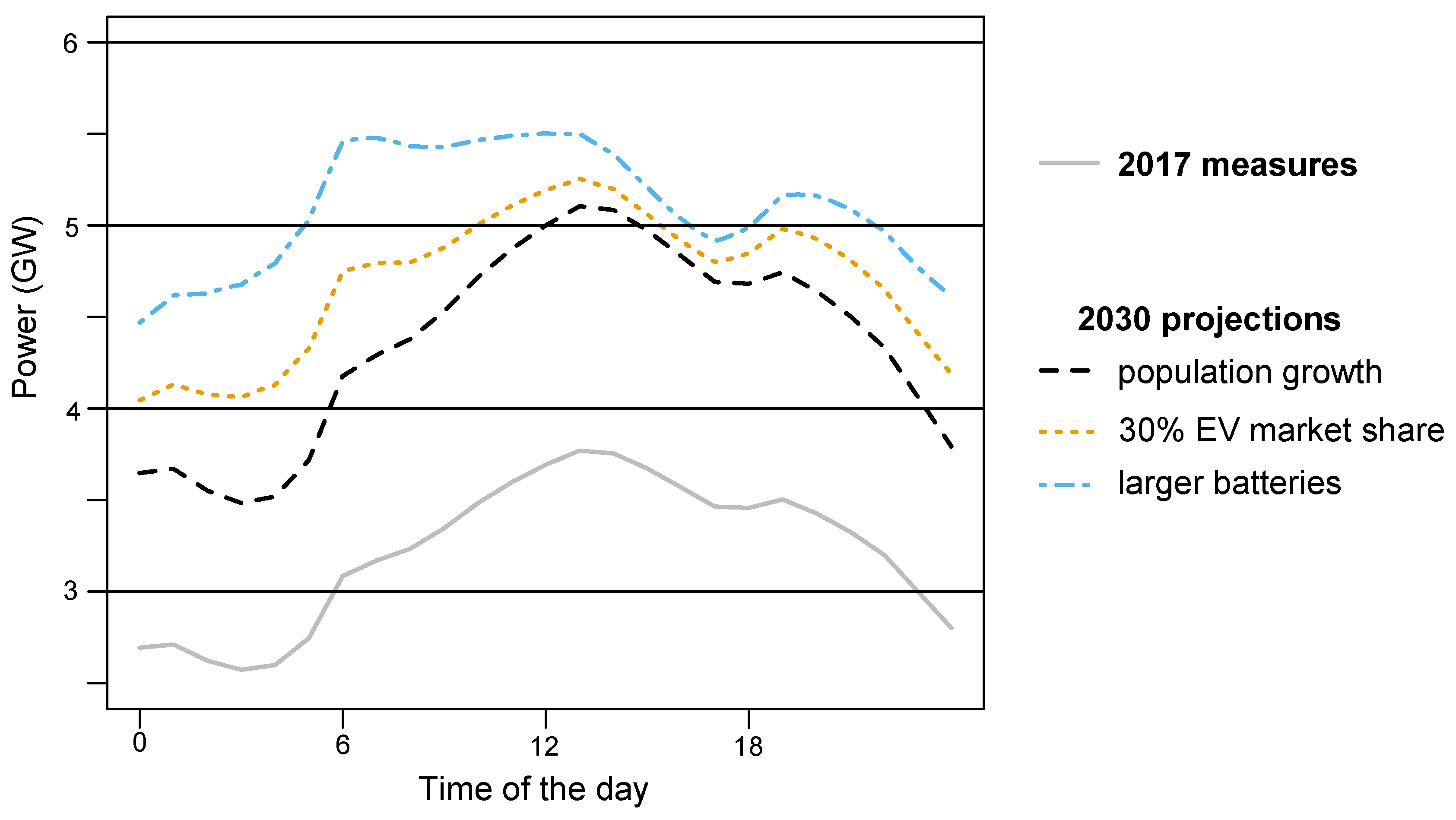
4. Long-Term Impact of High Penetration of EVs
4.1. Hypotheses
4.2. Simulation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CRPS | Continuous Ranked Probability Score |
| ERCOT | Electric Reliability Council Of Texas |
| EV | Electric Vehicle |
| GTB | Gradient Tree Boosting |
| IEA | International Energy Agency |
| MAE | Mean Absolute Error |
| UK | United Kingdom |
| US | United States |
References
- International Energy Agency. Global EV Outlook 2017; IEA Publishing: Paris, France, 2017. [Google Scholar]
- Pecan Street Inc. Dataport. 2018. Available online: https://dataport.cloud/ (accessed on 24 January 2019).
- International Energy Agency. Nordic EV Outlook 2018; IEA Publishing: Paris, France, 2018. [Google Scholar]
- Status of NVE’s Work on Network Tariffs in the Electricity Distribution System; The Norwegian Water Resources and Energy Directorate (NVE): Oslo, Norway, 2016.
- Wu, Q.; Jensen, J.M.; Hansen, L.H.; Bjerre, A.; Nielsen, A.H.; Østergaard, J. EV Portfolio Management and Grid Impact Study; Annual Report; Technical University of Denmark: Lyngby, Denmark, 2009. [Google Scholar]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of load demand due to EV battery charging in distribution systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Bae, S.; Kwasinski, A. Spatial and temporal model of electric vehicle charging demand. IEEE Trans. Smart Grid 2012, 3, 394–403. [Google Scholar] [CrossRef]
- Putrus, G.; Suwanapingkarl, P.; Johnston, D.; Bentley, E.; Narayana, M. Impact of electric vehicles on power distribution networks. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; pp. 827–831. [Google Scholar]
- Mwasilu, F.; Justo, J.J.; Kim, E.K.; Do, T.D.; Jung, J.W. Electric vehicles and smart grid interaction: A review on vehicle to grid and renewable energy sources integration. Renew. Sustain. Energy Rev. 2014, 34, 501–516. [Google Scholar] [CrossRef]
- Dickert, J.; Schegner, P. Residential load models for network planning purposes. Modern Electric Power Systems (MEPS). In Proceedings of the 2010 IEEE International Symposium, Wroclaw, Poland, 20–22 September 2010; pp. 1–6. [Google Scholar]
- Tomić, J.; Kempton, W. Using fleets of electric-drive vehicles for grid support. J. Power Sources 2007, 168, 459–468. [Google Scholar] [CrossRef]
- Correa-Florez, C.A.; Gerossier, A.; Michiorri, A.; Girard, R.; Kariniotakis, G. Residential electrical and thermal storage optimisation in a market environment. CIRED-Open Access Proc. J. 2017, 2017, 1967–1970. [Google Scholar] [CrossRef][Green Version]
- Ponocko, J.; Milanovic, J.V. Forecasting Demand Flexibility of Aggregated Residential Load Using Smart Meter Data. IEEE Trans. Power Syst. 2018, 33, 5446–5455. [Google Scholar] [CrossRef]
- Gough, R.; Dickerson, C.; Rowley, P.; Walsh, C. Vehicle-to-grid feasibility: A techno-economic analysis of EV-based energy storage. Appl. Energy 2017, 192, 12–23. [Google Scholar] [CrossRef]
- International Energy Agency. Energy Technology Perspective 2017; IEA Publishing: Paris, France, 2017. [Google Scholar]
- Smith, C.; Fowler, M.; Greene, E.; Nielson, C. Carbon emissions and climate change: A study of attitudes and their relationship with travel behavior. In Proceedings of the Transportation Research Board’s National Transportation Planning Applications Conference, Houston, TX, USA, 17–21 May 2009. [Google Scholar]
- Beckel, C.; Sadamori, L.; Staake, T.; Santini, S. Revealing household characteristics from smart meter data. Energy 2014, 78, 397–410. [Google Scholar] [CrossRef]
- Madrid, C.; Argueta, J.; Smith, J. Performance Characterization—1999 Nissan Altra-EV with Lithium-ion Battery; Southern California EDISON: Rosemead, CA, USA, 1999. [Google Scholar]
- Ionity. Fast Charging Station Network Starts to Take Shape: Site Partners for 18 European Countries Secured; Emobility Plus: Navi Mumbai, India, 2017. [Google Scholar]
- Duong, T. k: Kernel Smoothing; R Package Version 1.11.1; R Core Team: Kingston, ON, Canada, 2018. [Google Scholar]
- Anderson, N.H.; Hall, P.; Titterington, D.M. Two-sample test statistics for measuring discrepancies between two multivariate probability density functions using kernel-based density estimates. J. Multivar. Anal. 1994, 50, 41–54. [Google Scholar] [CrossRef]
- Duong, T.; Hazelton, M.L. Cross-validation bandwidth matrices for multivariate kernel density estimation. Scand. J. Stat. 2005, 32, 485–506. [Google Scholar] [CrossRef]
- Murtagh, F.; Legendre, P. Ward’s hierarchical agglomerative clustering method: Which algorithms implement Ward’s criterion? J. Classif. 2014, 31, 274–295. [Google Scholar] [CrossRef]
- Wright, M.N.; Ziegler, A. ranger: A Fast Implementation of Random Forests for High Dimensional Data in C++ and R. J. Stat. Softw. 2017, 77, 1–17. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Haben, S.; Ward, J.; Greetham, D.V.; Singleton, C.; Grindrod, P. A new error measure for forecasts of household-level, high resolution electrical energy consumption. Int. J. Forecast. 2014, 30, 246–256. [Google Scholar] [CrossRef]
- Ridgeway, G. gbm: Generalized Boosted Regression Models, R package version 2.1.3; R Core Team: Kingston, ON, Canada, 2017. [Google Scholar]
- Gerossier, A.; Girard, R.; Kariniotakis, G.; Michiorri, A. Probabilistic day-ahead forecasting of household electricity demand. CIRED-Open Access Proc. J. 2017, 2017, 2500–2504. [Google Scholar] [CrossRef]
- Friedman, J.H. Stochastic gradient boosting. Comput. Stat. Data Anal. 2002, 38, 367–378. [Google Scholar] [CrossRef]
- Musti, S.; Kockelman, K.M. Evolution of the household vehicle fleet: Anticipating fleet composition, PHEV adoption and GHG emissions in Austin, Texas. Transp. Res. Part A Policy Pract. 2011, 45, 707–720. [Google Scholar] [CrossRef]
- ERCOT. ERCOT Load History. Available online: http://www.ercot.com/gridinfo/load/load_hist/ (accessed on 11 March 2019).
- Nordic EV Barometer 2018; Norsk Elbilforening (Nordic Electric Vehicle Association): Oslo, Norway, 2018.
- Luthander, R.; Shepero, M.; Munkhammar, J.; Widén, J. Photovoltaics and opportunistic electric vehicle charging in the power system—A case study on a Swedish distribution grid. In Proceedings of the 7th International Workshop on Integration of Solar into Power Systems, Berlin, Germany, 24–25 October 2017. [Google Scholar]
- He, Y.; Venkatesh, B.; Guan, L. Optimal scheduling for charging and discharging of electric vehicles. IEEE Trans. Smart Grid 2012, 3, 1095–1105. [Google Scholar] [CrossRef]
- Cao, Y.; Tang, S.; Li, C.; Zhang, P.; Tan, Y.; Zhang, Z.; Li, J. An optimized EV charging model considering TOU price and SOC curve. IEEE Trans. Smart Grid 2012, 3, 388–393. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nominal Power (kW) | Max Charging Duration (min) | Battery Capacity (kWh) | Number of EVs |
|---|---|---|---|
| 1.5 | 760 | 19 | 1 |
| 3.5 | 120 | 7 | 2 |
| 3.3–3.7 | 210–240 | 12–16 | 35 |
| 6.6 | 150 | 17 | 4 |
| 6.2–7.4 | 480–600 | 53–71 | 4 |
| Cluster | Charging Period | Number of EVs | Frequency |
|---|---|---|---|
| 1 | Night | 24 | 52% |
| 2 | Evening | 9 | 20% |
| 3 | Throughout the day | 9 | 20% |
| 4 | Late evening | 4 | 9% |
| Index | Persistence | GTB | Bottom-Up |
|---|---|---|---|
| MAE (kW) | 6.24 | 4.86 | 4.87 |
| CRPS (kW) | 6.24 | 3.63 | 3.59 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gerossier, A.; Girard, R.; Kariniotakis, G. Modeling and Forecasting Electric Vehicle Consumption Profiles. Energies 2019, 12, 1341. https://doi.org/10.3390/en12071341
Gerossier A, Girard R, Kariniotakis G. Modeling and Forecasting Electric Vehicle Consumption Profiles. Energies. 2019; 12(7):1341. https://doi.org/10.3390/en12071341
Chicago/Turabian StyleGerossier, Alexis, Robin Girard, and George Kariniotakis. 2019. "Modeling and Forecasting Electric Vehicle Consumption Profiles" Energies 12, no. 7: 1341. https://doi.org/10.3390/en12071341
APA StyleGerossier, A., Girard, R., & Kariniotakis, G. (2019). Modeling and Forecasting Electric Vehicle Consumption Profiles. Energies, 12(7), 1341. https://doi.org/10.3390/en12071341