Influence Analysis and Optimization of Sampling Frequency on the Accuracy of Model and State-of-Charge Estimation for LiNCM Battery



Abstract
:1. Introduction
2. Battery Model and SOC Estimation
2.1. Battery Model
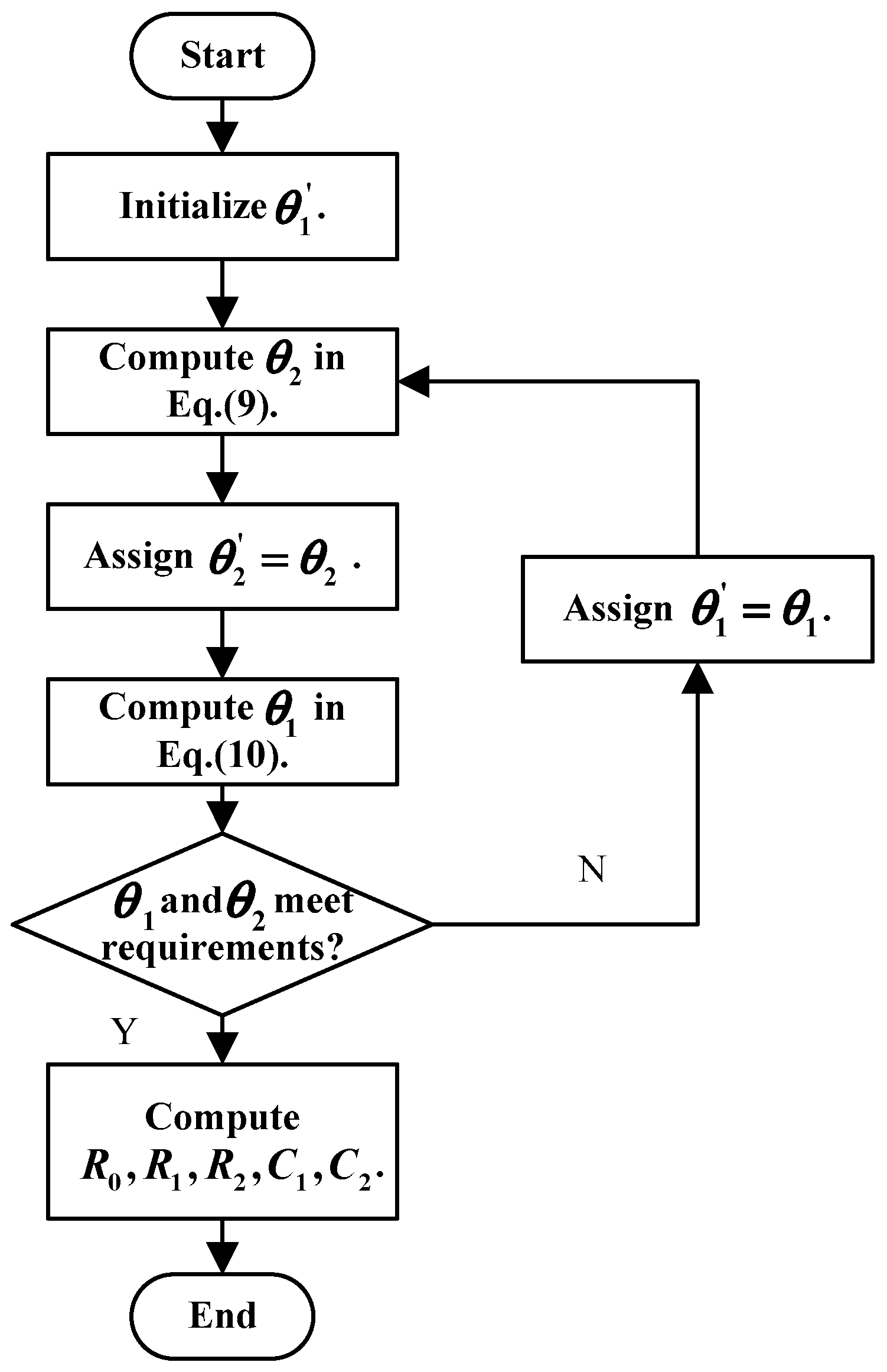
2.2. Parameters Identification Based on Iterative Identification Algorithm
2.3. SOC Estimation
3. Experiment
3.1. Battery Test Bench
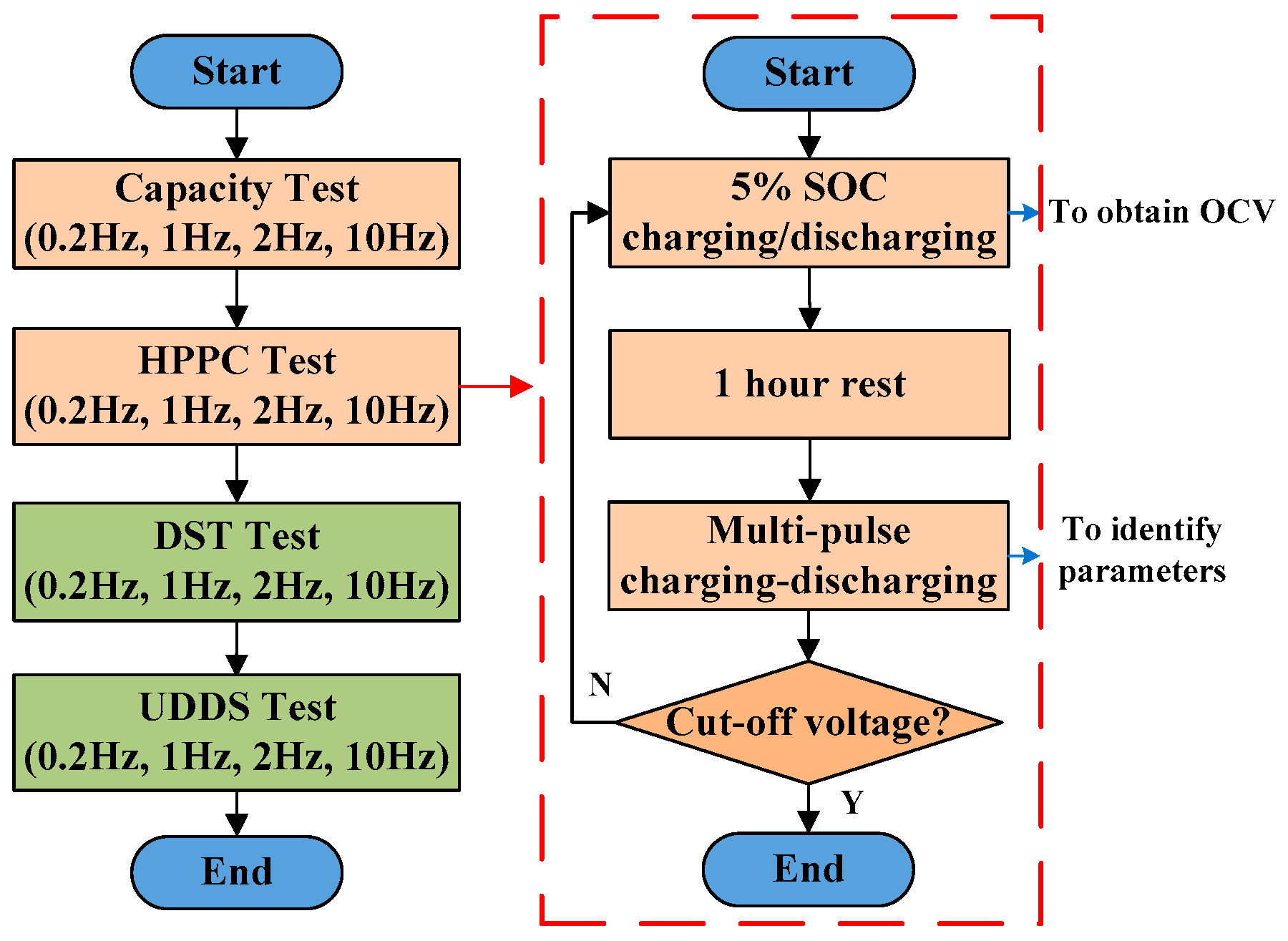
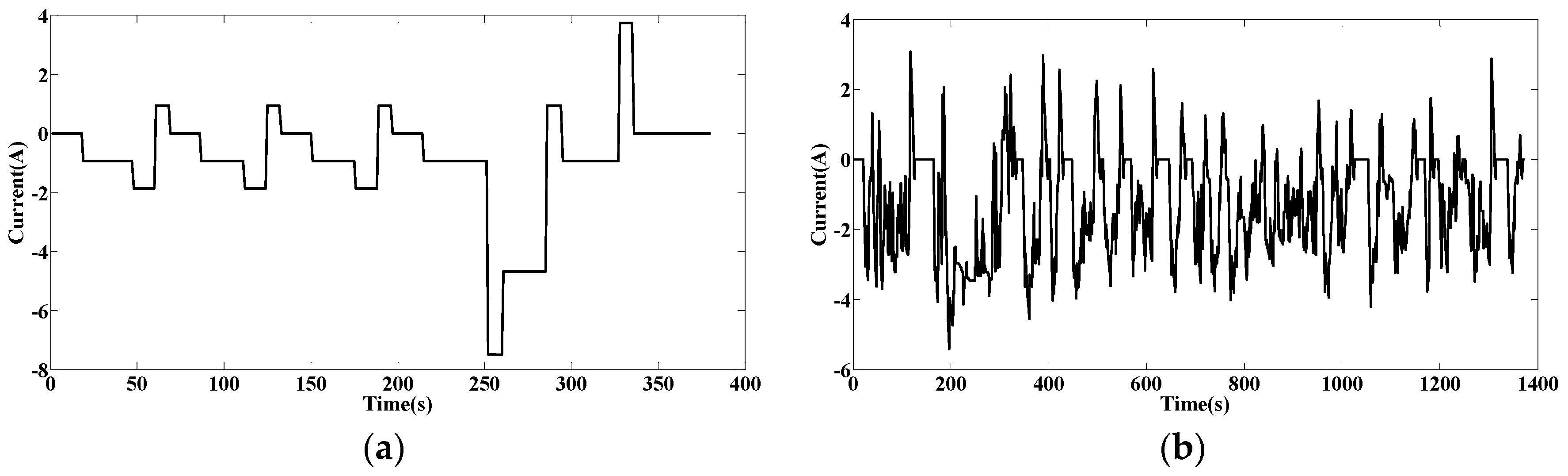
3.2. Battery Test Schedule
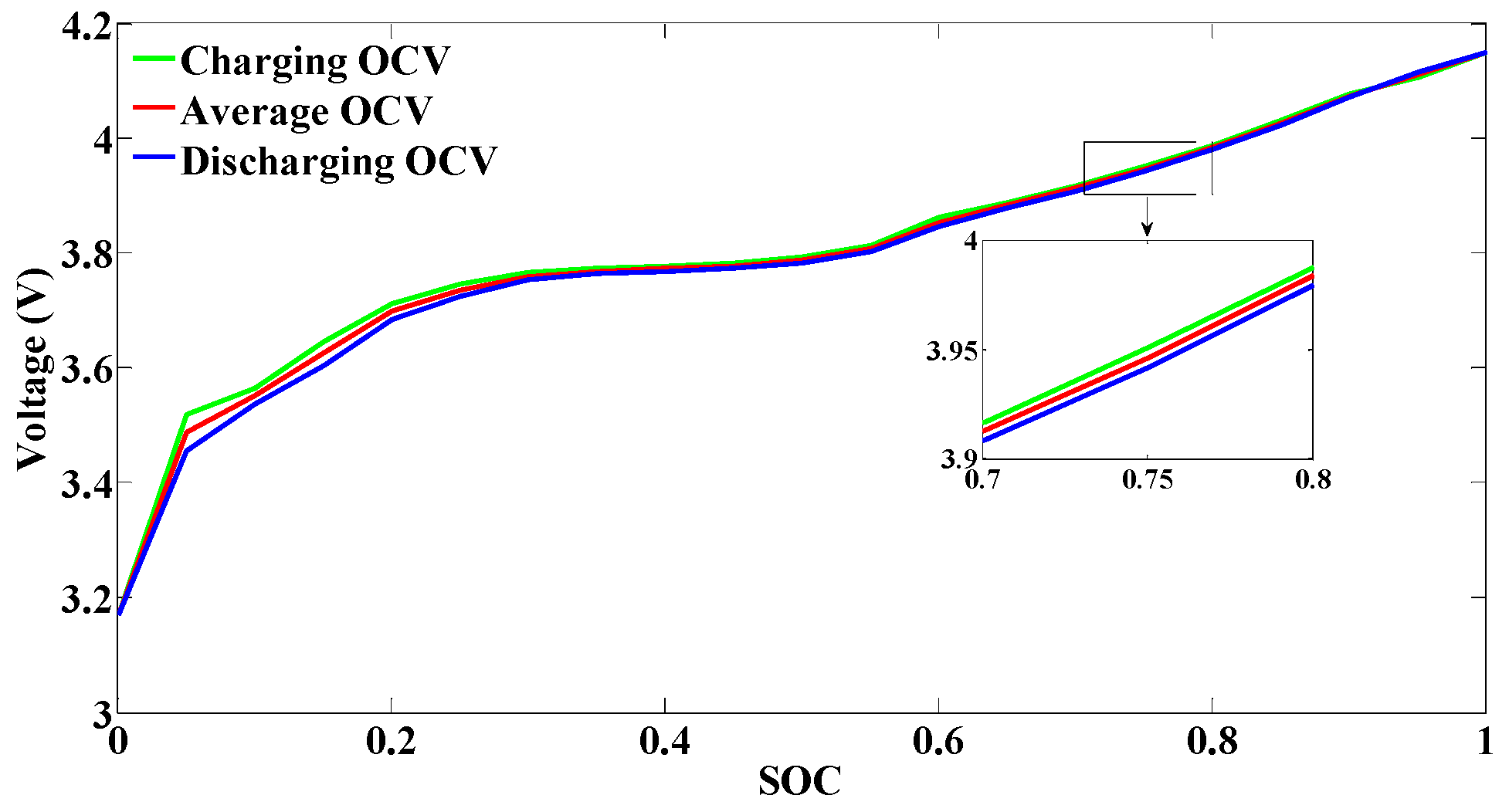
3.3. Experimental Results
4. Validation
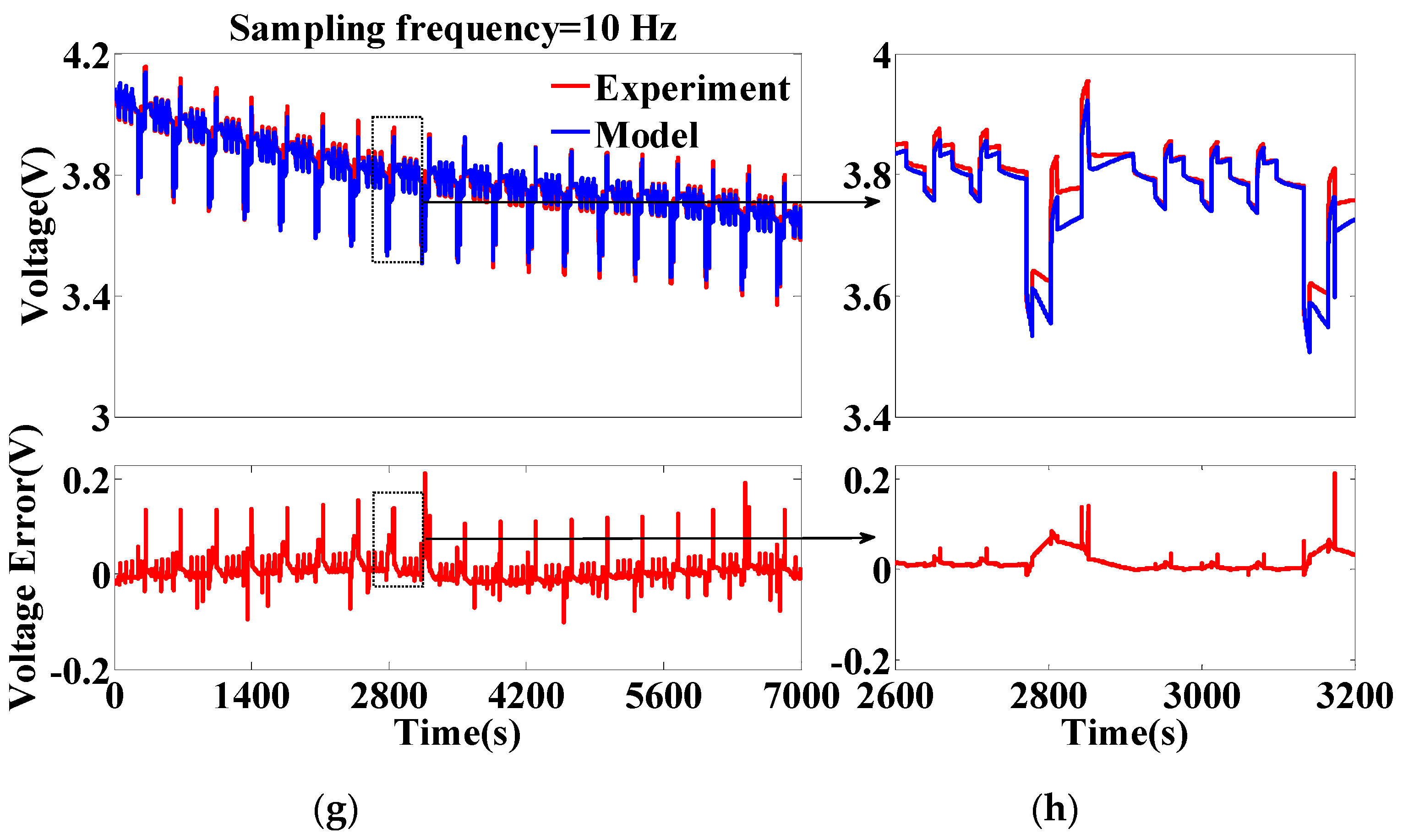
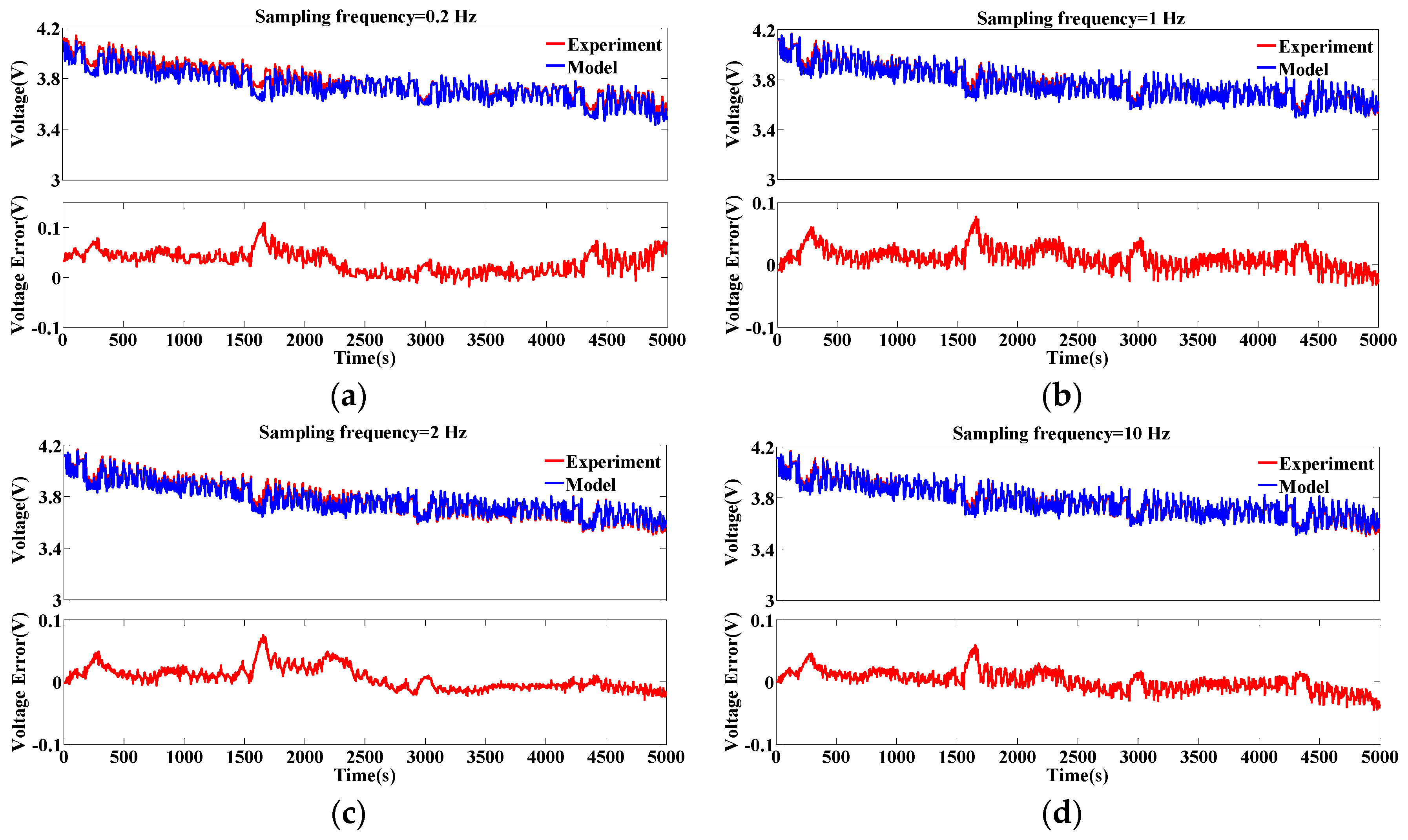
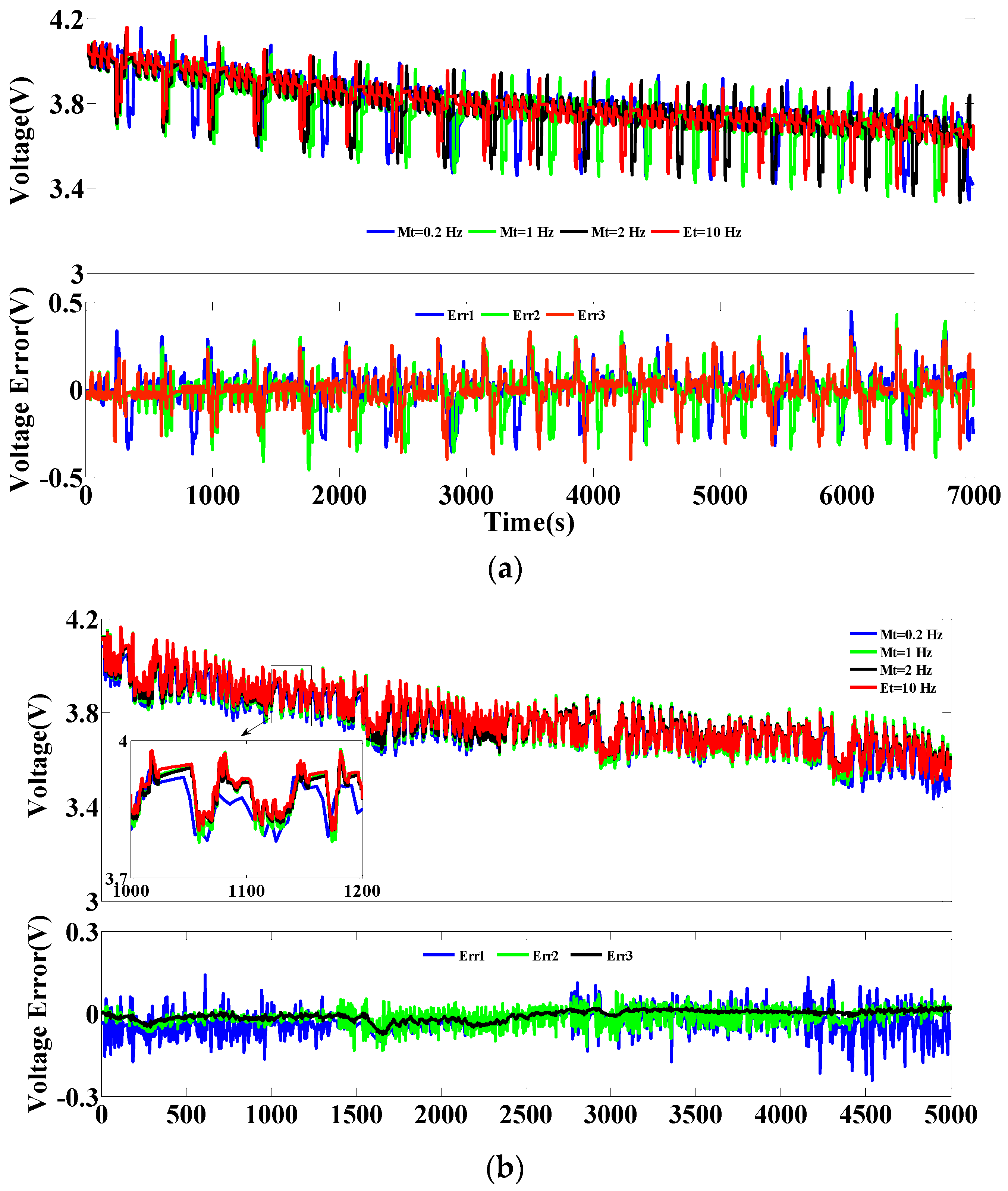
4.1. Voltage Response Results at Different Sampling Frequencies
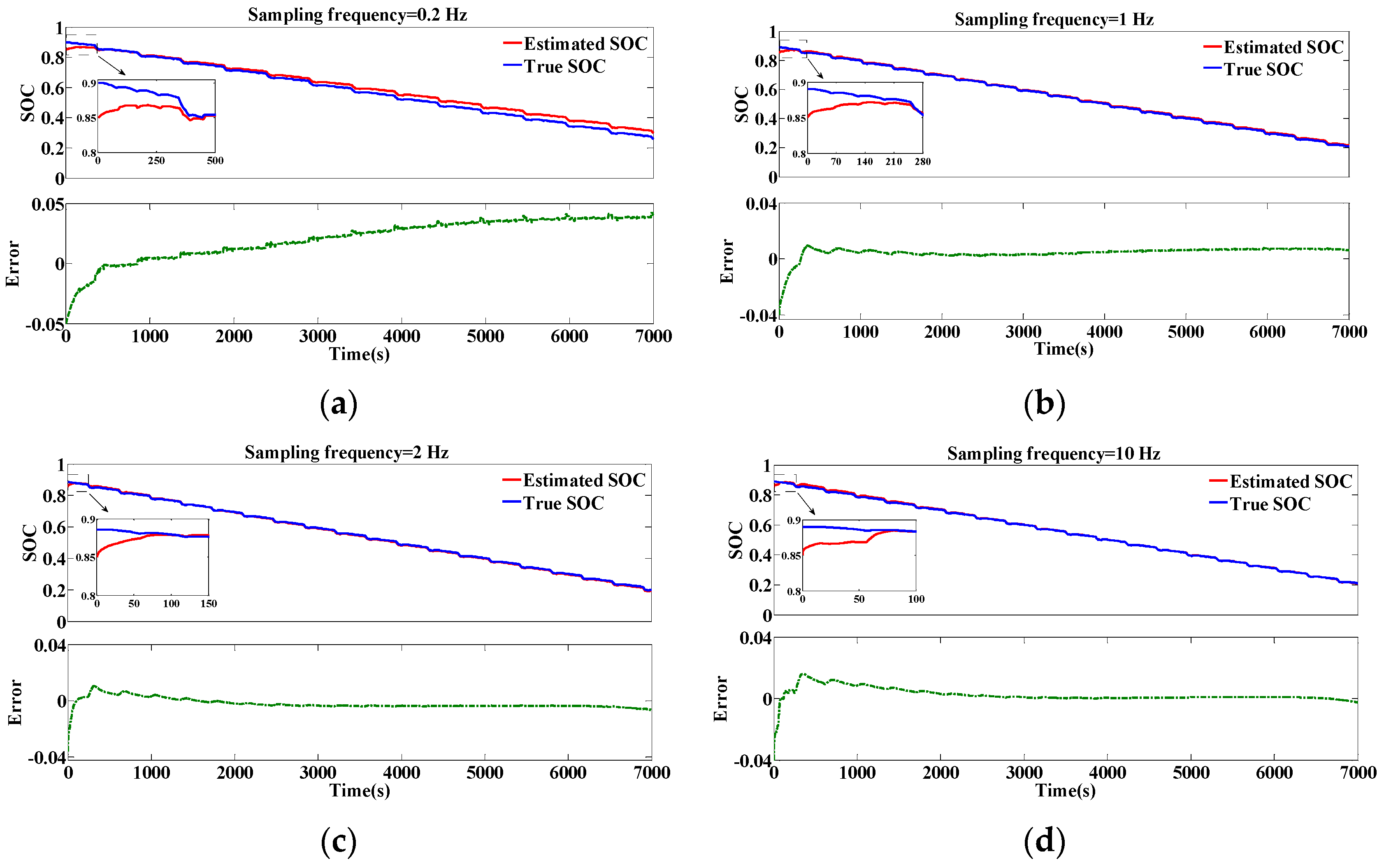
4.2. SOC Estimation Results at Different Sampling Frequencies
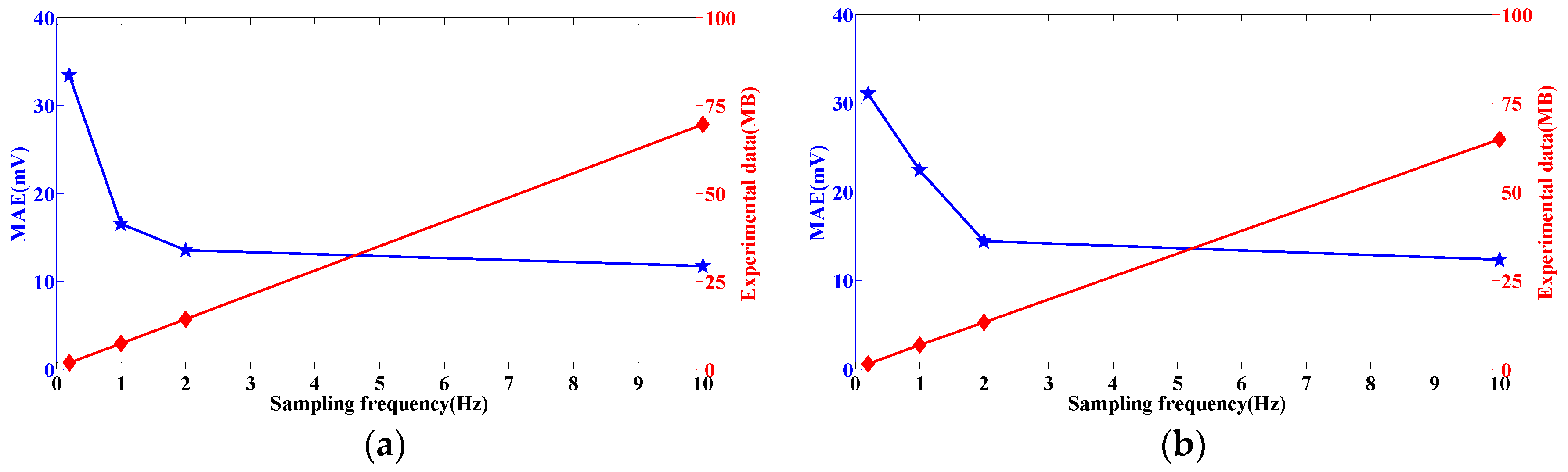
5. Quantitative Analysis and Optimal Selection
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xia, B.; Chen, C.; Tian, Y.; Wang, M.; Sun, W.; Xu, Z. State of charge estimation of lithium-ion batteries based on an improved parameter identification method. Energy 2015, 90, 1426–1434. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Chen, Z. A method for state-of-charge estimation of LiFePO4 batteries at dynamic currents and temperatures using particle filter. J. Power Sources 2015, 279, 306–311. [Google Scholar] [CrossRef]
- Hu, J.N.; Hu, J.J.; Lin, H.B.; Li, X.P.; Jiang, C.L.; Qiu, X.H.; Li, W.S. State-of-charge estimation for battery management system using optimized support vector machine for regression. J. Power Sources 2014, 269, 682–693. [Google Scholar] [CrossRef]
- Farmann, A.; Sauer, D.U. Comparative study of reduced order equivalent circuit models for on-board state-of-available-power prediction of lithium-ion batteries in electric vehicles. Appl. Energy 2018, 225, 1102–1122. [Google Scholar] [CrossRef]
- Chaturvedi, N.A.; Klein, R.; Christensen, J.; Ahmed, J.; Kojic, A. Algorithms for Advanced Battery-Management Systems. IEEE Contr. Syst. Mag. 2010, 30, 49–68. [Google Scholar]
- Einhorn, M.; Conte, F.V.; Kral, C.; Fleig, J. Comparison, Selection, and Parameterization of Electrical Battery Models for Automotive Applications. IEEE Trans. Power Electron. 2013, 28, 1429–1437. [Google Scholar] [CrossRef]
- Pesaran, A.A. Battery thermal models for hybrid vehicle simulations. J. Power Sources 2002, 110, 377–382. [Google Scholar] [CrossRef]
- Johnson, V.H. Battery performance models in ADVISOR. J. Power Sources 2002, 110, 321–329. [Google Scholar] [CrossRef]
- Nelson, P.; Bloom, I.; Amine, K.; Henriksen, G. Design modeling of lithium-ion battery performance. J. Power Sources 2002, 110, 437–444. [Google Scholar] [CrossRef]
- Liu, C.; Liu, W.; Wang, L.; Hu, G.; Ma, L.; Ren, B. A new method of modeling and state of charge estimation of the battery. J. Power Sources 2016, 320, 1–12. [Google Scholar] [CrossRef]
- Hentunen, A.; Lehmuspelto, T.; Suomela, J. Time-Domain Parameter Extraction Method for Thevenin-Equivalent Circuit Battery Models. IEEE Trans. Energy Conver. 2014, 29, 558–566. [Google Scholar] [CrossRef]
- Zhou, Z.; Duan, B.; Shang, Y.; Li, Y.; Zhang, C.; Cui, N. An Iterative Identification Method for Equivalent Circuit Battery Models; Institute of Electrical and Electronics Engineers Inc.: Jinan, China, 2017; pp. 6988–6992. [Google Scholar]
- Ng, K.S.; Moo, C.; Chen, Y.; Hsieh, Y. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Piller, S.; Perrin, M.; Jossen, A. Methods for state-of-charge determination and their applications. J. Power Sources 2001, 96, 113–120. [Google Scholar] [CrossRef]
- Shen, W.X.; Chan, C.C.; Lo, E.W.C.; Chau, K.T. A new battery available capacity indicator for electric vehicles using neural network. Energ. Convers. Manag. 2002, 43, 817–826. [Google Scholar] [CrossRef]
- Li, J.; Barillas, J.K.; Guenther, C.; Danzer, M.A. A comparative study of state of charge estimation algorithms for LiFePO4 batteries used in electric vehicles. J. Power Sources 2013, 230, 244–250. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs—Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Liaw, B.Y.; Nagasubramanian, G.; Jungst, R.G.; Doughty, D.H. Modeling of lithium ion cells—A simple equivalent-circuit model approach. Solid State Ionics. 2004, 175, 835–839. [Google Scholar]
- Dubarry, M.; Vuillaume, N.; Liaw, B.Y. From single cell model to battery pack simulation for Li-ion batteries. J. Power Sources 2009, 186, 500–507. [Google Scholar] [CrossRef]
- Hu, Y.; Yurkovich, S. Linear parameter varying battery model identification using subspace methods. J. Power Sources 2011, 196, 2913–2923. [Google Scholar] [CrossRef]
- Liaw, B.Y.; Dubarry, M. From driving cycle analysis to understanding battery performance in real-life electric hybrid vehicle operation. J. Power Sources 2007, 174, 76–88. [Google Scholar] [CrossRef]
- Andre, D.; Meiler, M.; Steiner, K.; Wimmer, C.; Soczka-Guth, T.; Sauer, D.U. Characterization of high-power lithium-ion batteries by electrochemical impedance spectroscopy. I. Experimental investigation. J. Power Sources 2011, 196, 5334–5341. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs—Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, L.Y.; Li, X.; Chen, W.; Yin, G.G.; Jiang, J. Robust and Adaptive Estimation of State of Charge for Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2015, 62, 4948–4957. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H.; Sun, F. Robustness analysis of State-of-Charge estimation methods for two types of Li-ion batteries. J. Power Sources 2012, 217, 209–219. [Google Scholar] [CrossRef]
- Kim, I. Nonlinear state of charge estimator for hybrid electric vehicle battery. IEEE Trans. Power Electron. 2008, 23, 2027–2034. [Google Scholar]
- Chiang, C.; Yang, J.; Cheng, W. Temperature and state-of-charge estimation in ultracapacitors based on extended Kalman filter. J. Power Sources 2013, 234, 234–243. [Google Scholar] [CrossRef]
- Pilatowicz, G.; Marongiu, A.; Drillkens, J.; Sinhuber, P.; Sauer, D.U. A critical overview of definitions and determination techniques of the internal resistance using lithium-ion, lead-acid, nickel metal-hydride batteries and electrochemical double-layer capacitors as examples. J. Power Sources 2015, 296, 365–376. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definitions: and . |
| Initialization: |
| State variable: . Mean square estimation error: . |
| Time Update: |
| Prior estimate of state: . Prior estimate of error covariance: . |
| Measurement Update: |
| Kalman gain matrix update: . Measurement update of state estimate: . Measurement update of error covariance: . |
| Parameter | LiNCM |
|---|---|
| Rated capacity | 2500 mAh |
| Nominal voltage | 3.6 V |
| Charging cut-off voltage | 4.2 V |
| Discharging cut-off voltage | 3.0 V |
| Maximum charging current | 2.5 A (1C) |
| Maximum discharging current | 7.5 A (3C) |
| Sampling Frequency (Hz) | Measured Capacity (Ah) | Average Capacity (Ah) | ||
|---|---|---|---|---|
| 0.2 | 2.502 | 2.504 | 2.503 | 2.503 |
| 1 | 2.500 | 2.501 | 2.505 | 2.502 |
| 2 | 2.507 | 2.502 | 2.503 | 2.504 |
| 10 | 2.503 | 2.506 | 2.501 | 2.503 |
| Sampling Frequency (Hz) | Average R0 (ohm) | Average R1 (ohm) | Average R2 (ohm) | Average C1 (F) | Average C2 (F) |
|---|---|---|---|---|---|
| 0.2 | 0.0416 | 0.0006 | 0.0350 | 2252.9 | 1523.9 |
| 1 | 0.0391 | 0.0025 | 0.0445 | 1095.4 | 1454.7 |
| 2 | 0.0367 | 0.0017 | 0.0419 | 772.1 | 1208.4 |
| 10 | 0.0290 | 0.0058 | 0.0464 | 1179.1 | 1389.4 |
| Sampling Frequency (Hz) | Working Condition | MAE (%) | RMSE (%) | Max Error (%) |
|---|---|---|---|---|
| 0.2 | DST | 0.79 | 1.10 | 7.72 |
| UDDS | 0.74 | 0.89 | 2.59 | |
| 1 | DST | 0.39 | 0.55 | 7.69 |
| UDDS | 0.53 | 0.47 | 1.82 | |
| 2 | DST | 0.32 | 0.45 | 5.71 |
| UDDS | 0.34 | 0.44 | 1.78 | |
| 10 | DST | 0.28 | 0.39 | 5.10 |
| UDDS | 0.29 | 0.37 | 1.40 |
| Sampling Frequency (Hz) | Working Condition | MAE | RMSE | Max Error | Convergence Time (s) |
|---|---|---|---|---|---|
| 0.2 | DST | 0.024 | 0.027 | 0.042 | 491 |
| UDDS | 0.005 | 0.011 | 0.015 | 260 | |
| 1 | DST | 0.006 | 0.006 | 0.011 | 269 |
| UDDS | 0.004 | 0.01 | 0.013 | 247 | |
| 2 | DST | 0.004 | 0.004 | 0.011 | 110 |
| UDDS | 0.004 | 0.007 | 0.011 | 115 | |
| 10 | DST | 0.003 | 0.005 | 0.016 | 86 |
| UDDS | 0.003 | 0.008 | 0.018 | 110 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, P.; Zhou, Z.; Qu, S.; Zhang, C.; Duan, B. Influence Analysis and Optimization of Sampling Frequency on the Accuracy of Model and State-of-Charge Estimation for LiNCM Battery. Energies 2019, 12, 1205. https://doi.org/10.3390/en12071205
Gu P, Zhou Z, Qu S, Zhang C, Duan B. Influence Analysis and Optimization of Sampling Frequency on the Accuracy of Model and State-of-Charge Estimation for LiNCM Battery. Energies. 2019; 12(7):1205. https://doi.org/10.3390/en12071205
Chicago/Turabian StyleGu, Pingwei, Zhongkai Zhou, Shaofei Qu, Chenghui Zhang, and Bin Duan. 2019. "Influence Analysis and Optimization of Sampling Frequency on the Accuracy of Model and State-of-Charge Estimation for LiNCM Battery" Energies 12, no. 7: 1205. https://doi.org/10.3390/en12071205
APA StyleGu, P., Zhou, Z., Qu, S., Zhang, C., & Duan, B. (2019). Influence Analysis and Optimization of Sampling Frequency on the Accuracy of Model and State-of-Charge Estimation for LiNCM Battery. Energies, 12(7), 1205. https://doi.org/10.3390/en12071205