Research on the Operation Control Strategy of a Low-Voltage Direct Current Microgrid Based on a Disturbance Observer and Neural Network Adaptive Control Algorithm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Control Strategy of Photovoltaic and Energy Storage System
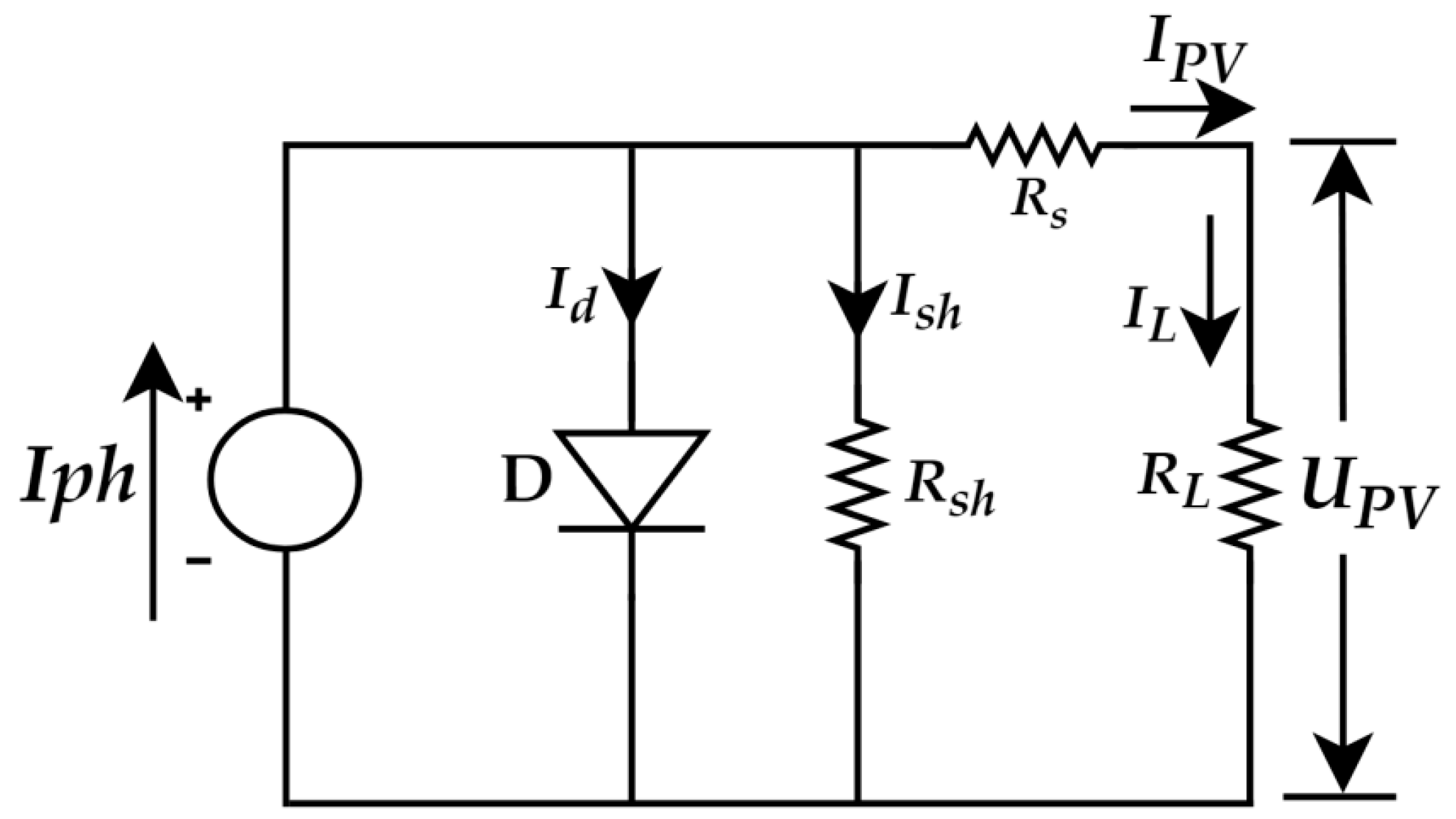
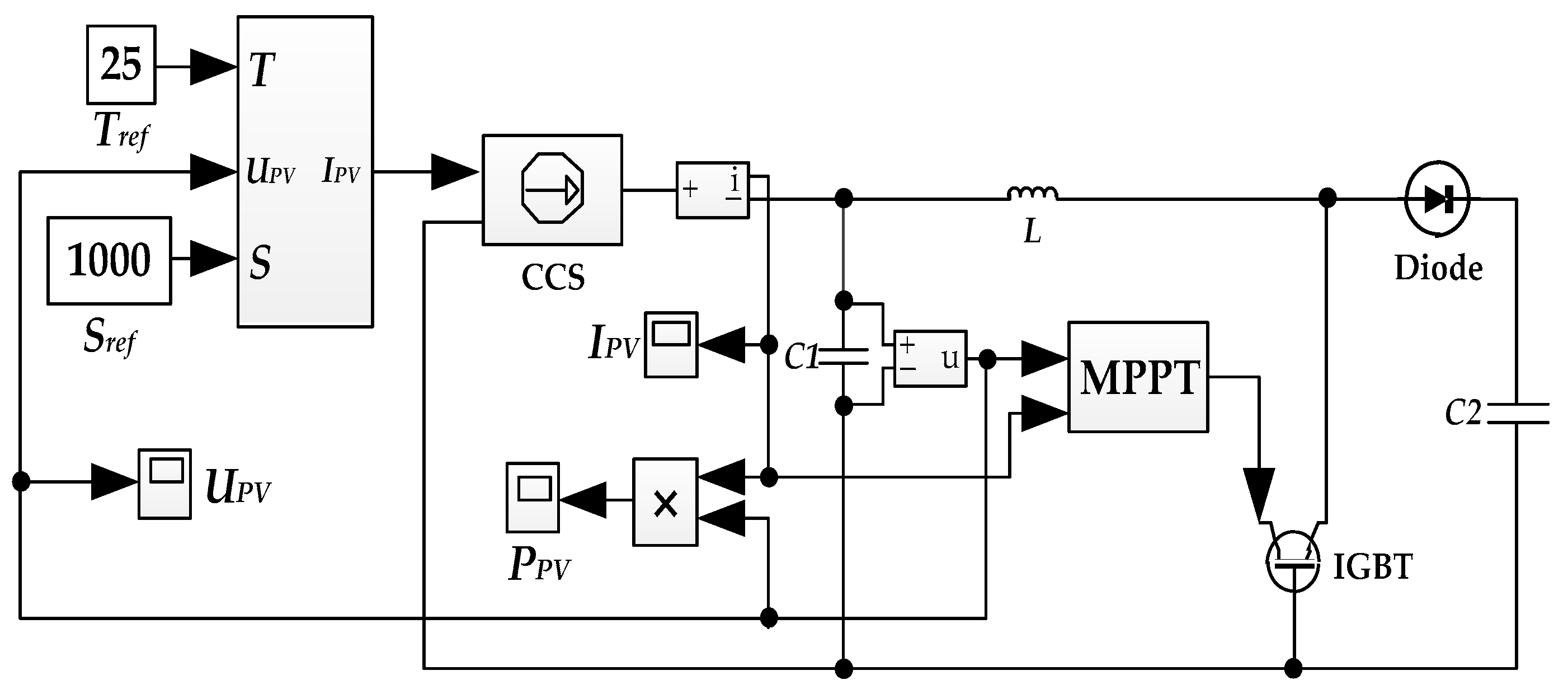
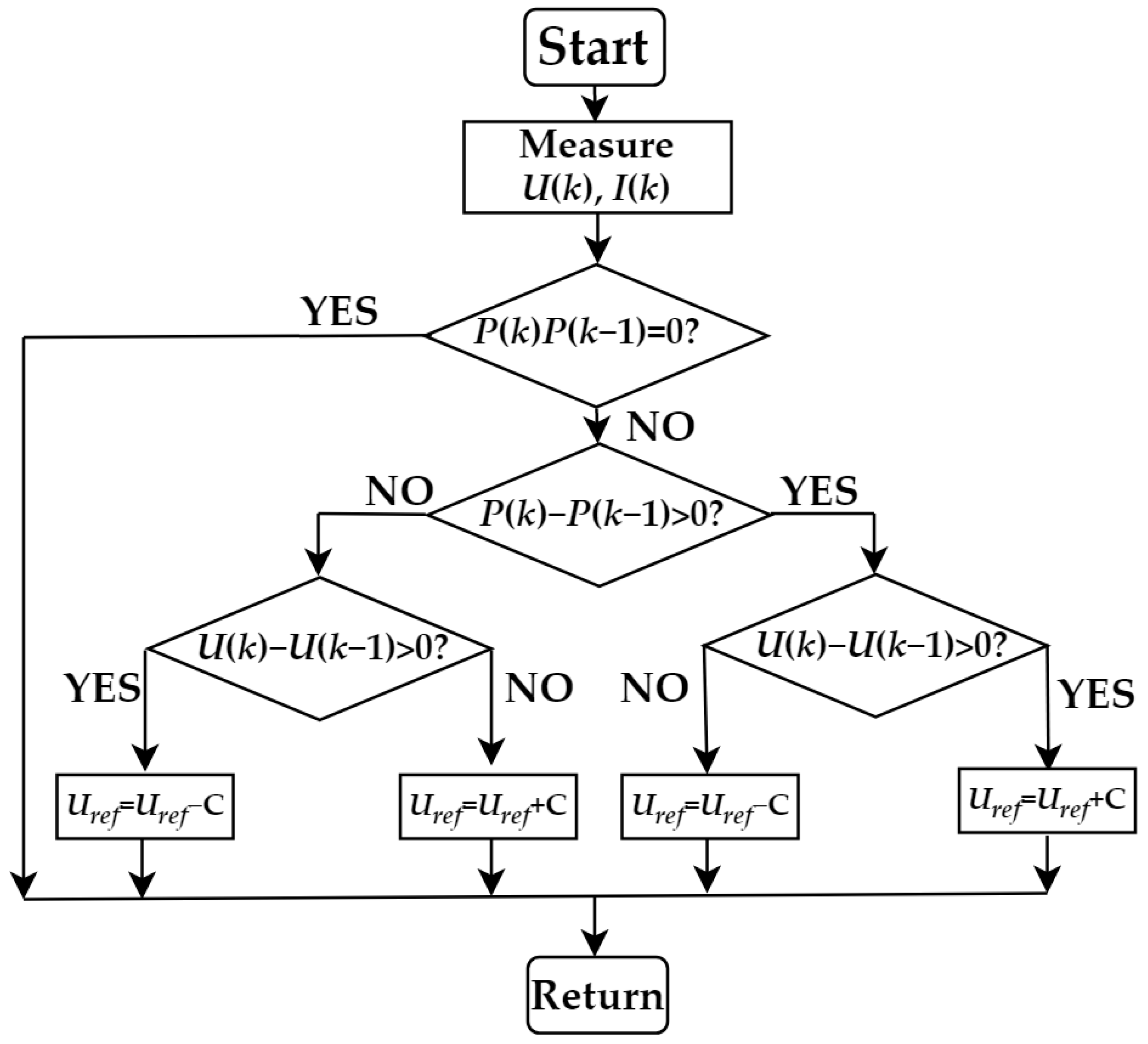
2.1. Photovoltaic Cell Model and Control Strategy
2.2. Control Algorithm of a Photovoltaic and Energy Storage System
3. Control Strategy for a Grid-Connected Operation of the Low-Voltage DC Microgrid
3.1. Droop Control Strategy
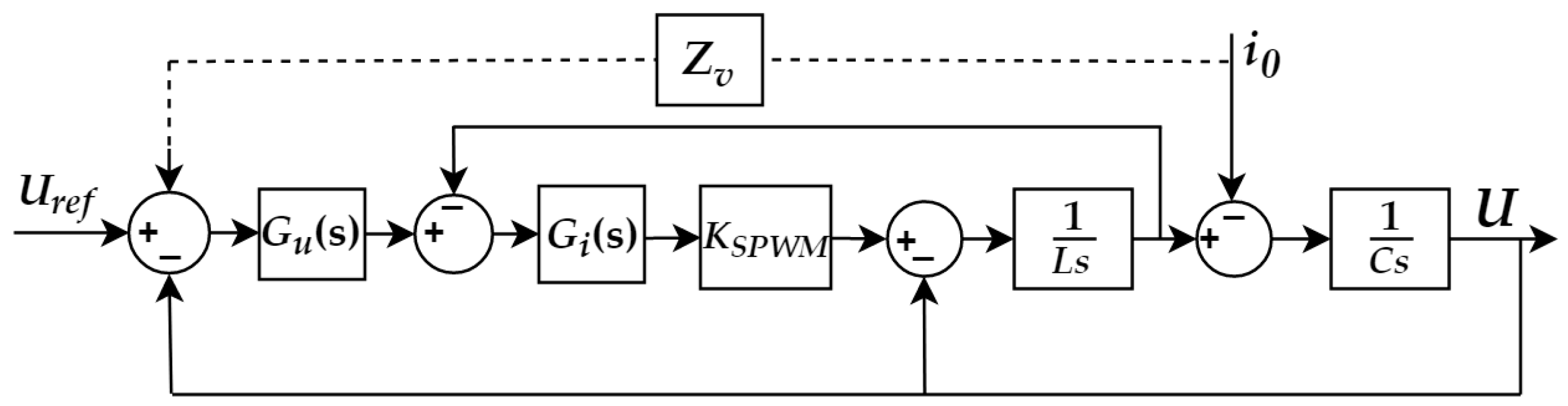
3.2. Grid-Connected Operation Control Strategy of the Microgrid
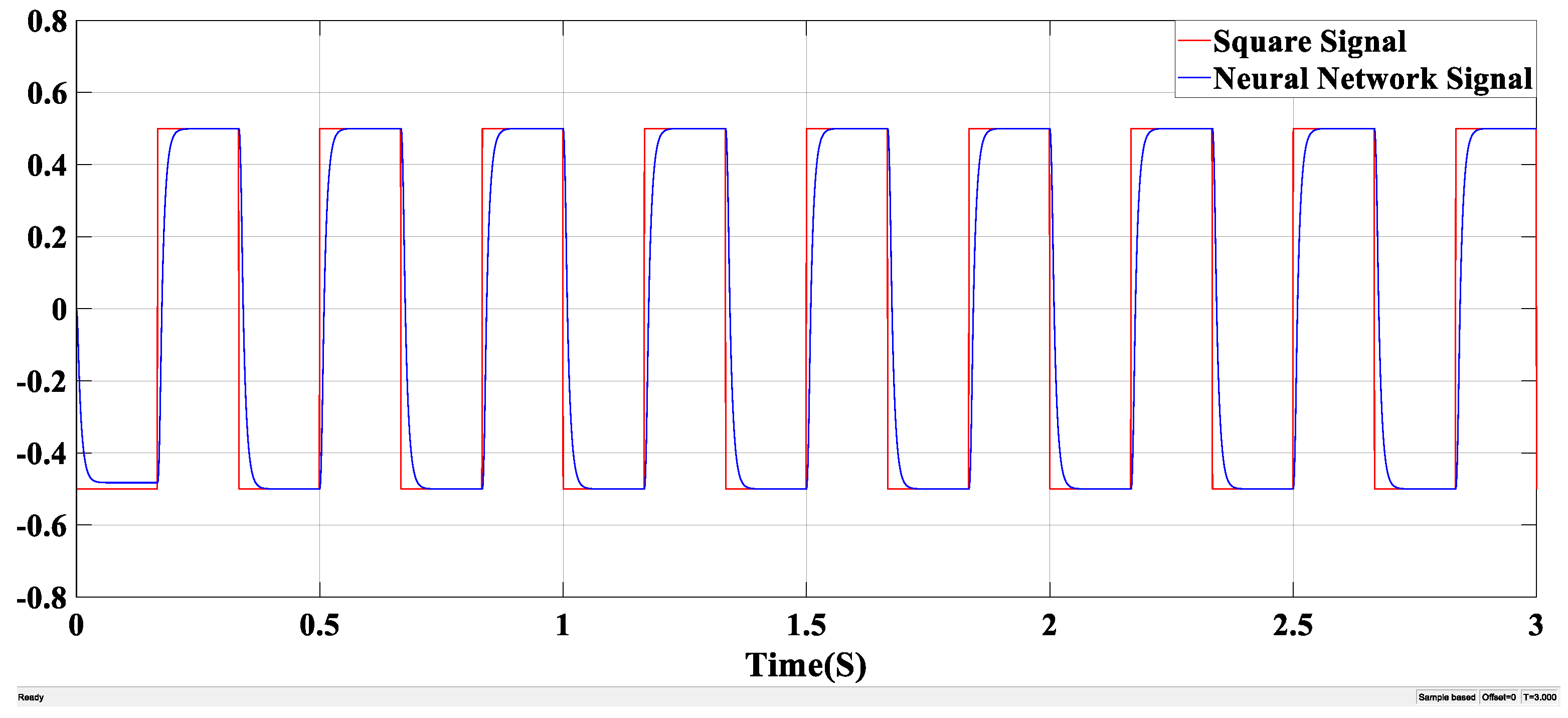
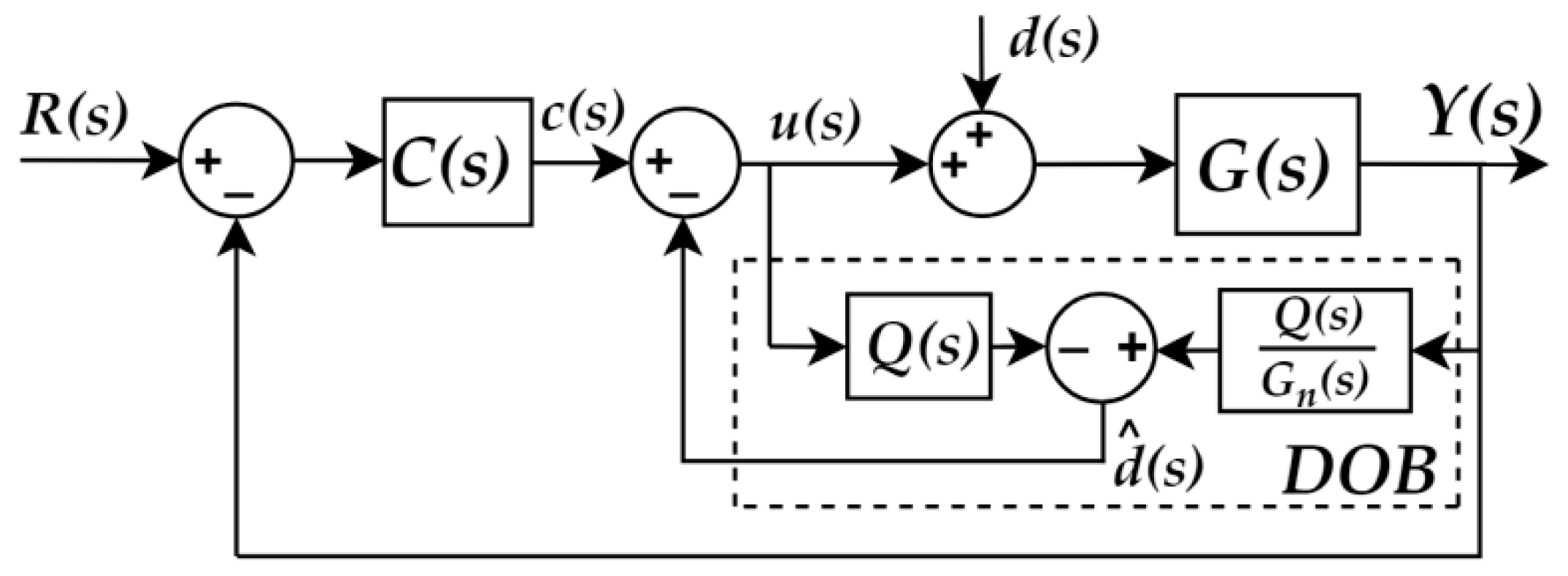
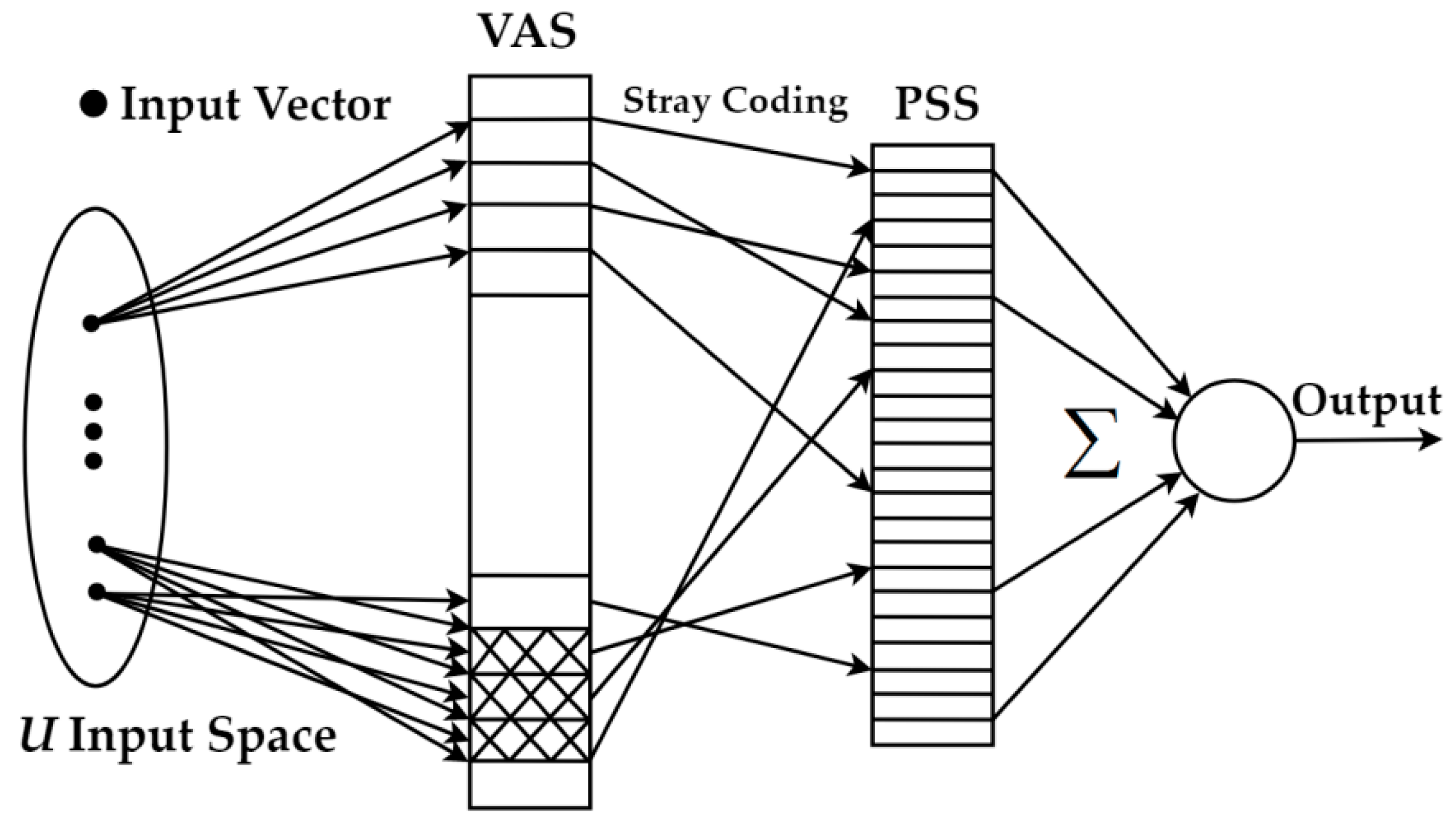
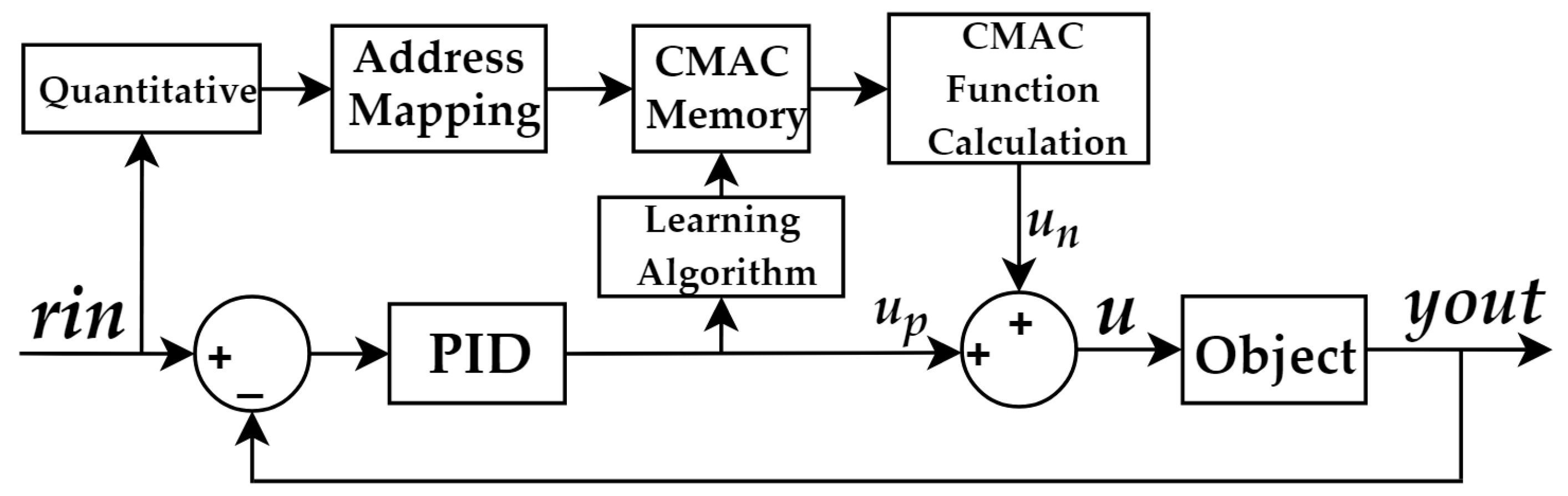
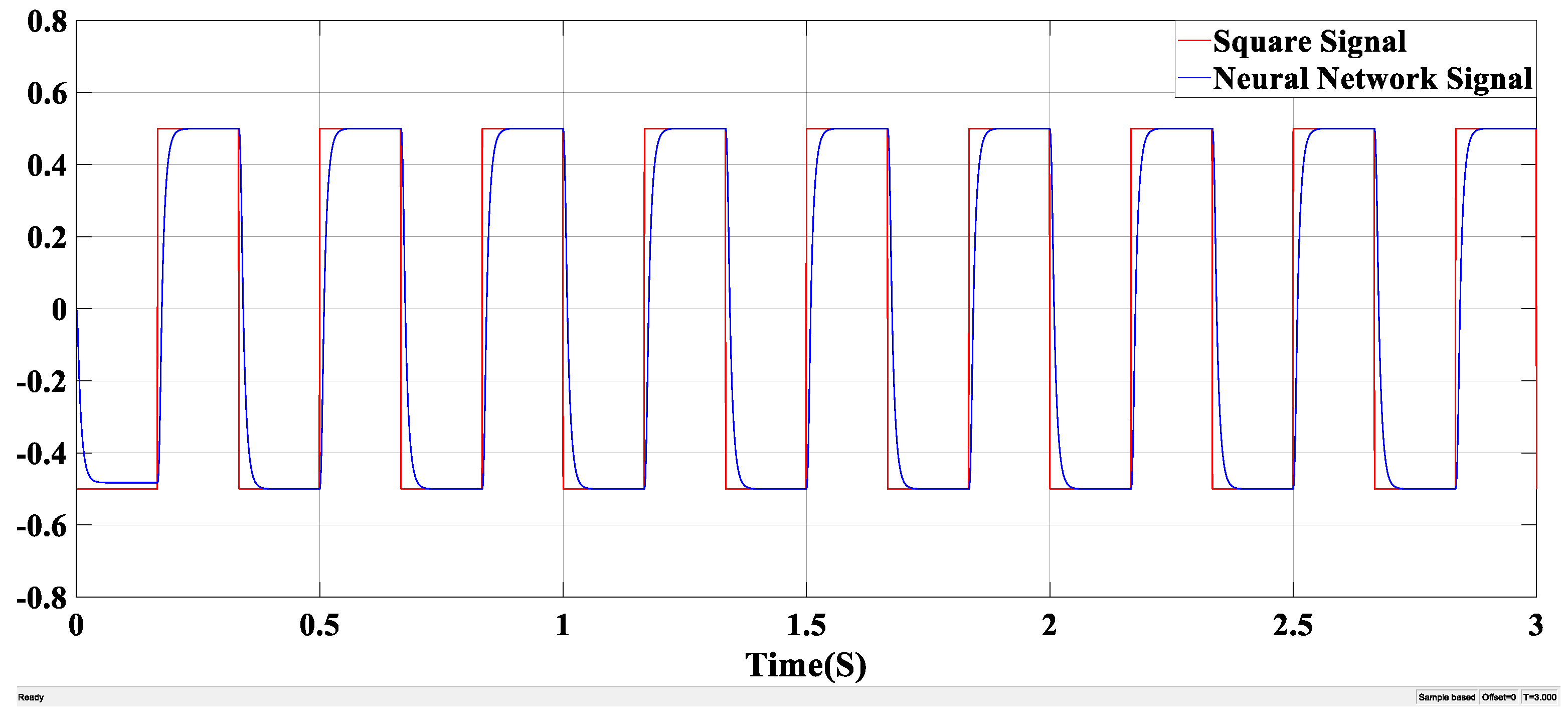
3.2.1. Neural Network Adaptive Control Algorithm
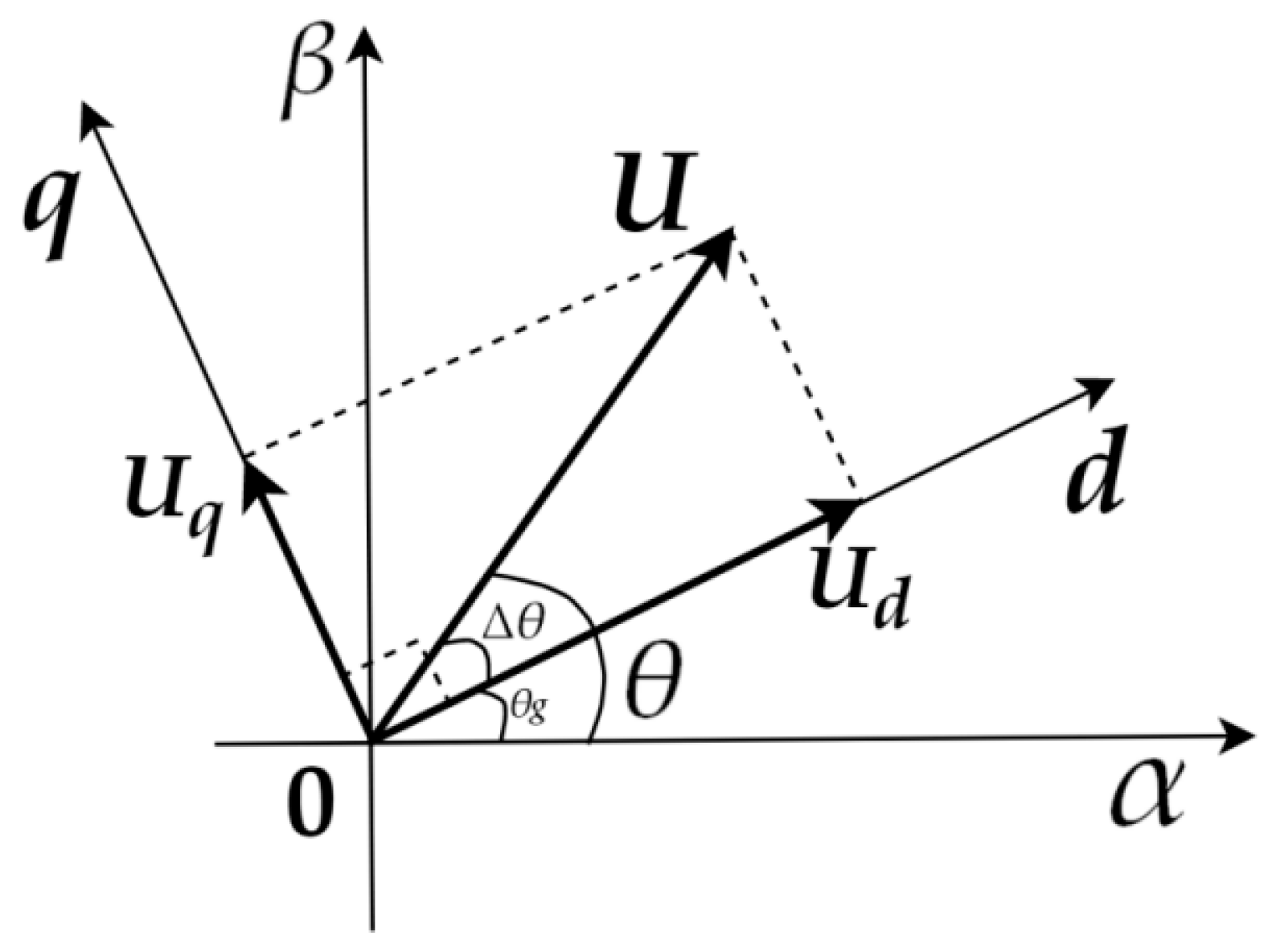
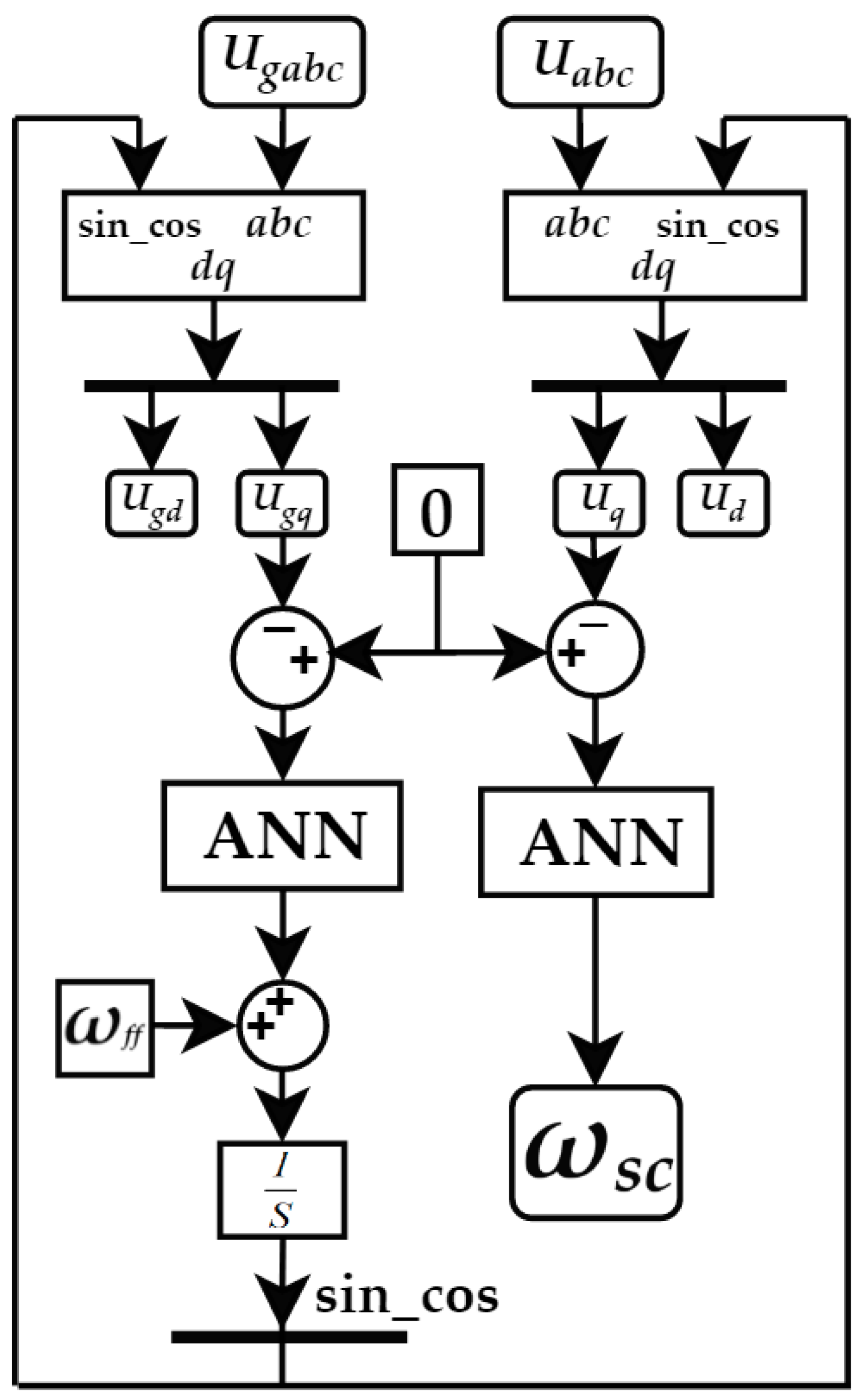
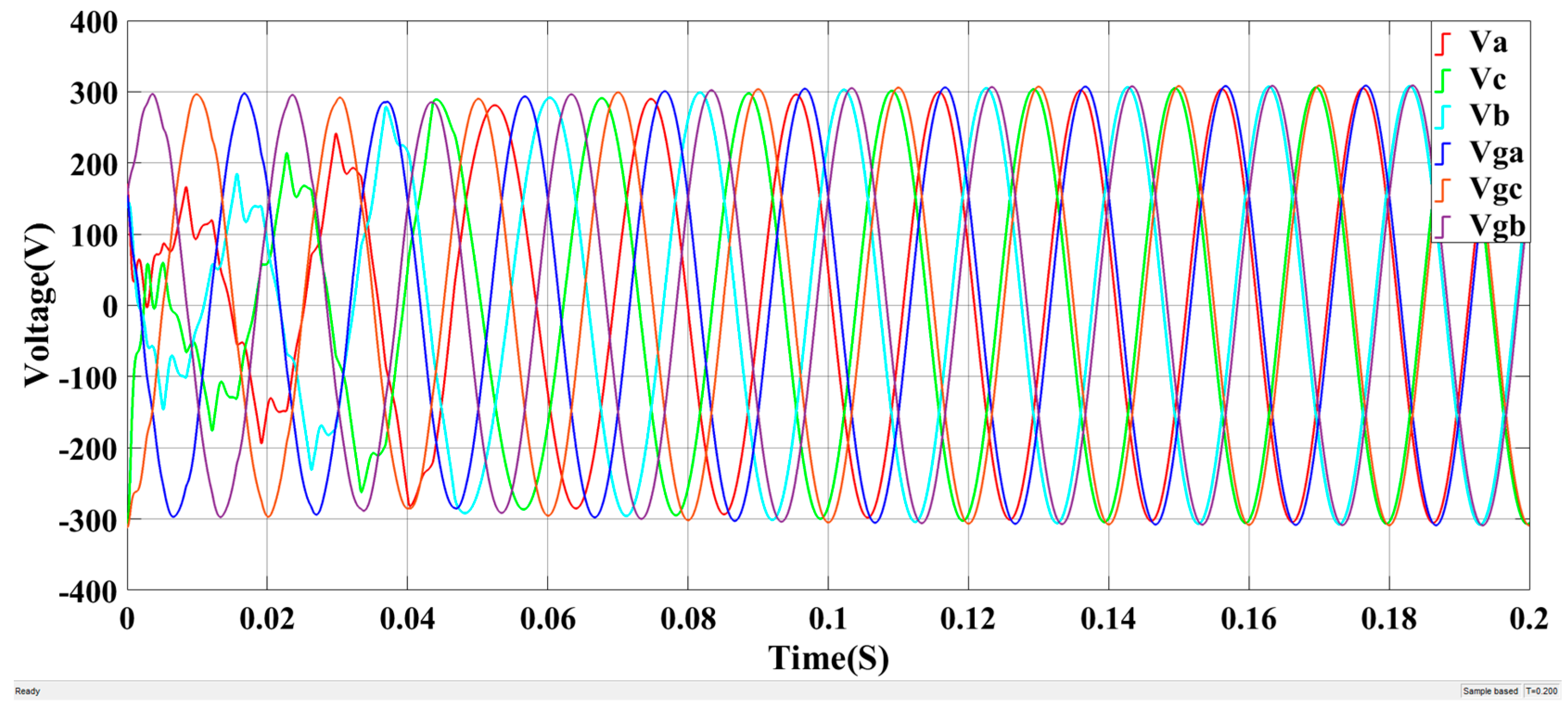
3.2.2. Pre-synchronization Control Algorithm of a Grid-Connected Operation
4. Simulation Analysis
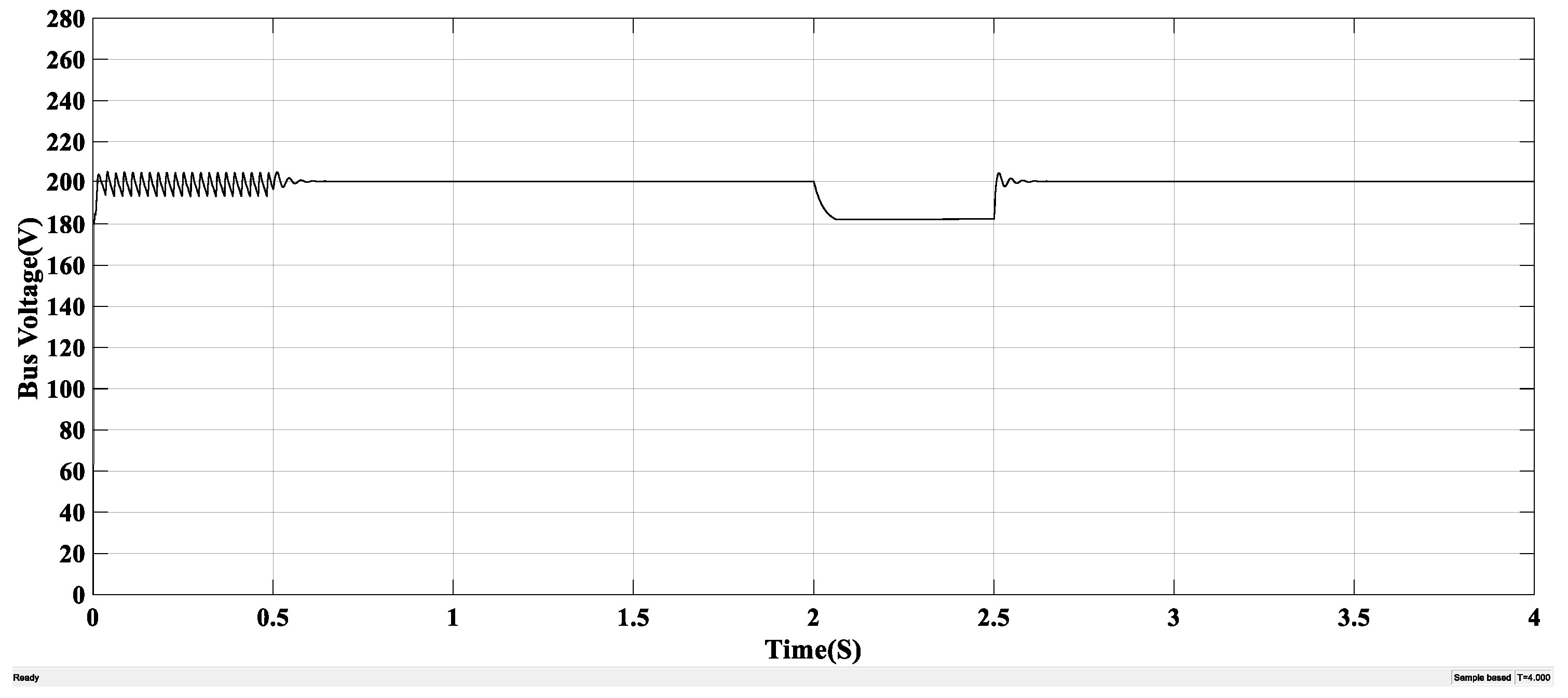
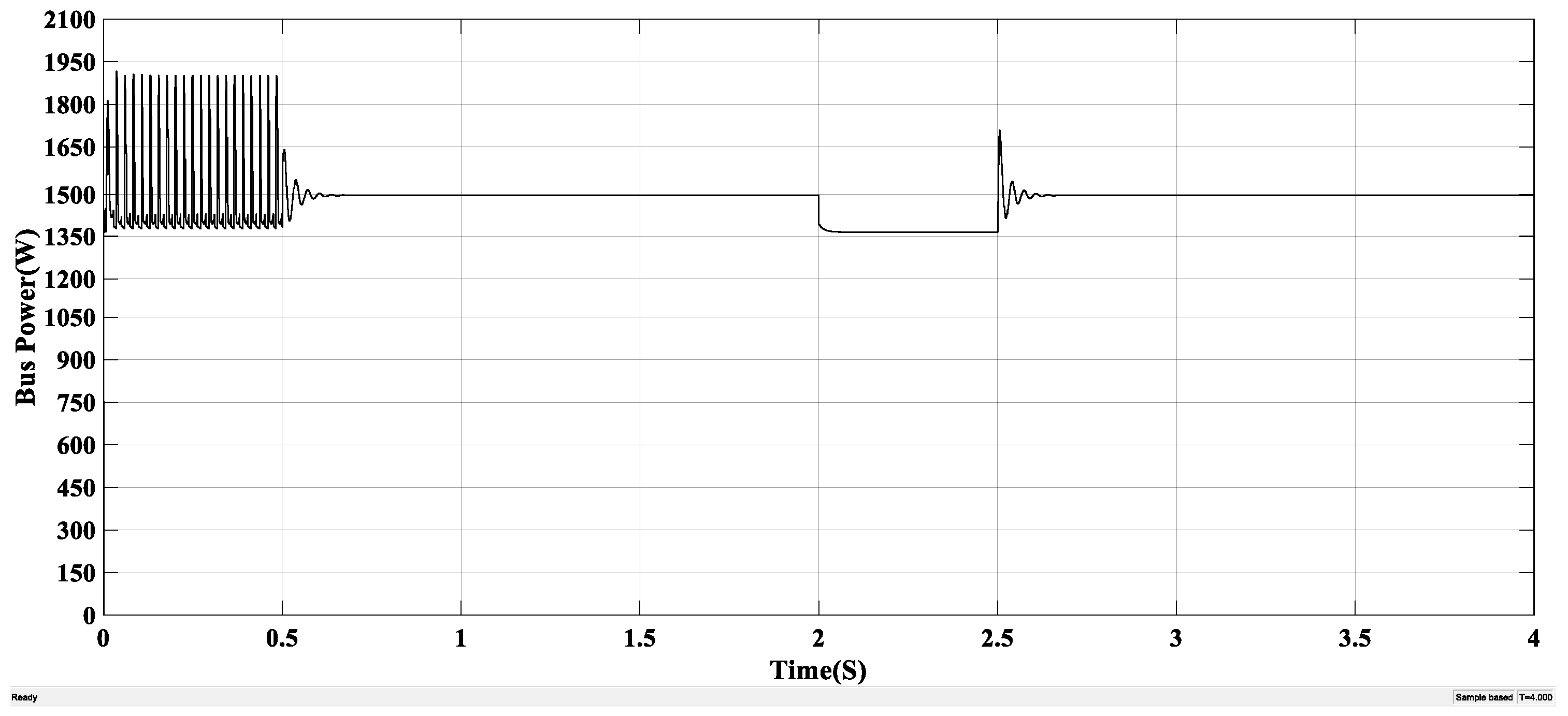
4.1. Simulation Analysis of Island Operation of DC Microgrid
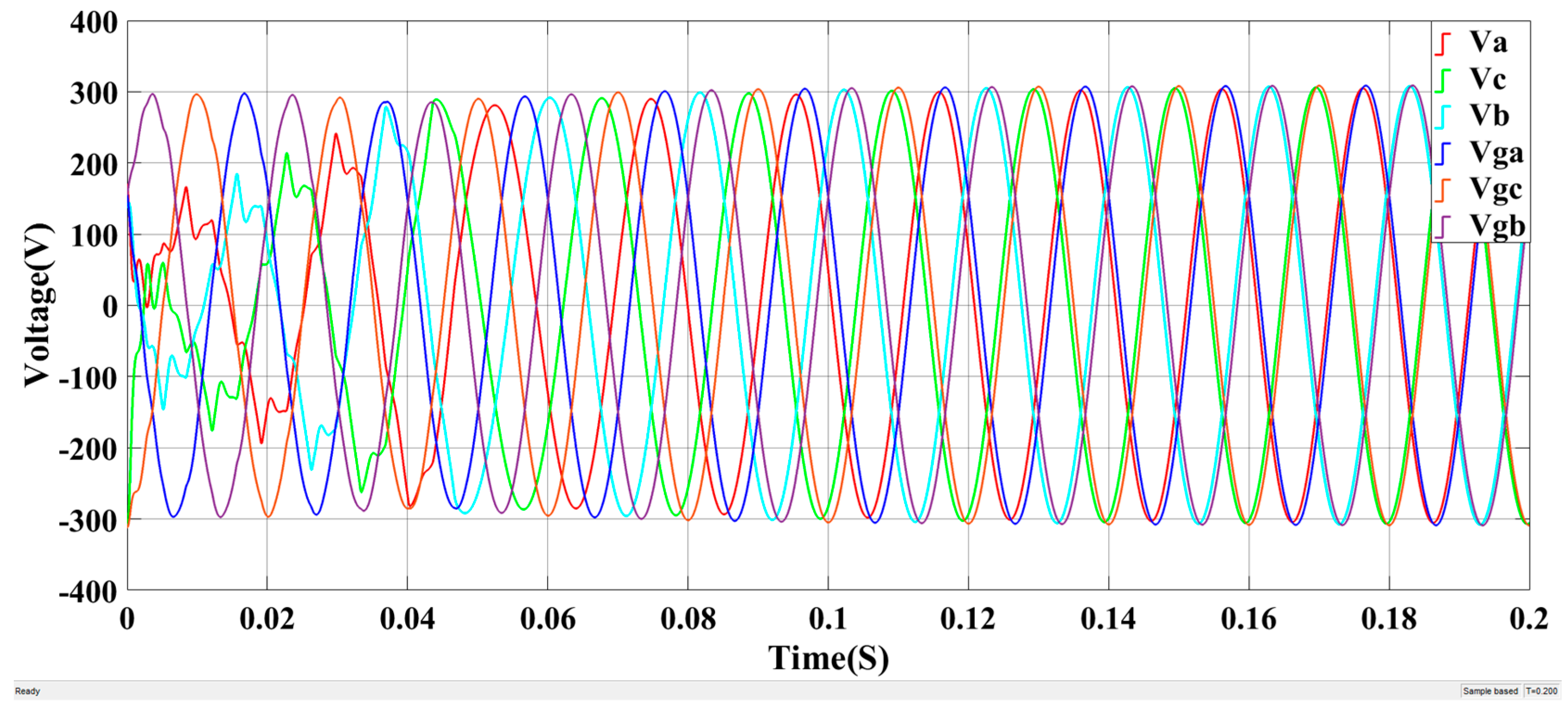
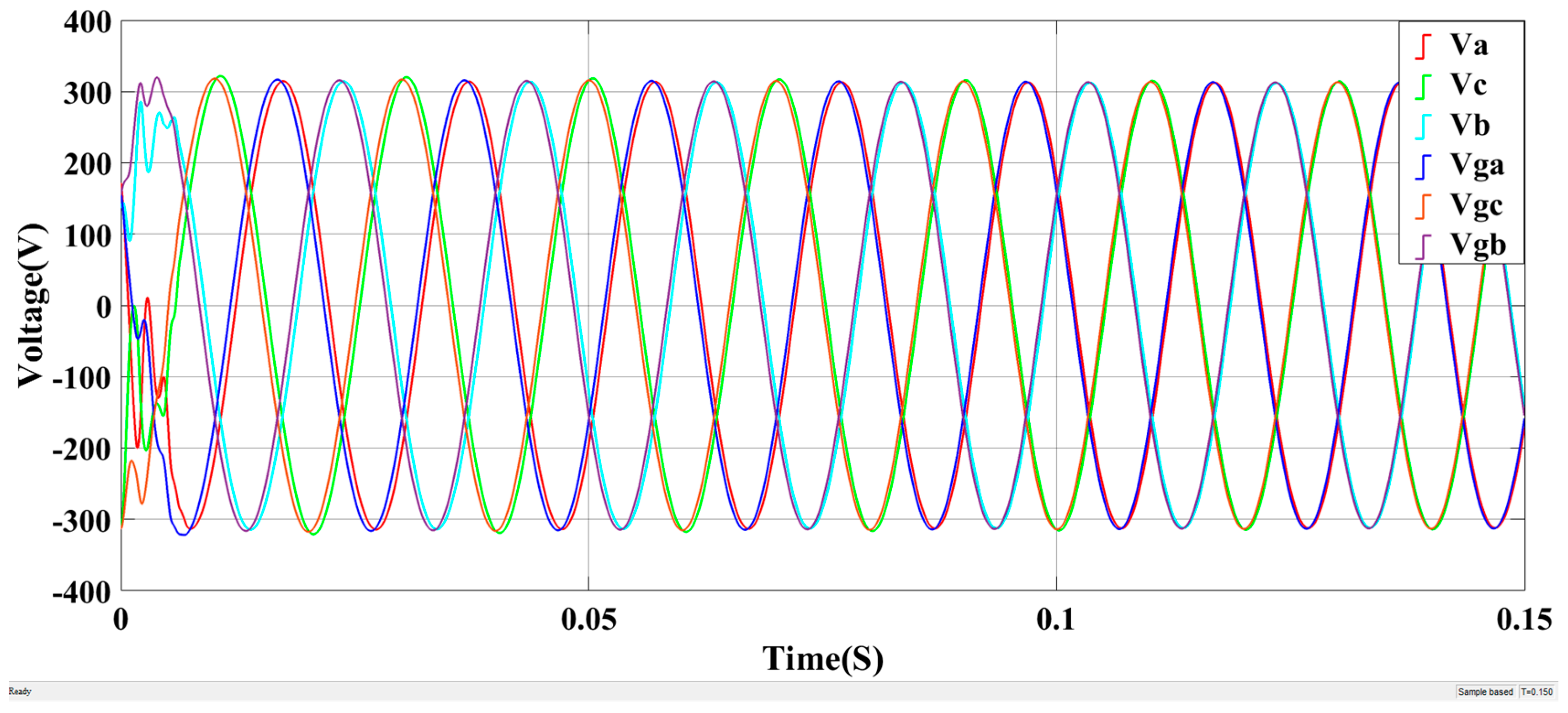
4.2. Simulation Analysis of Grid-Connected Operation of the DC Microgrid
5. Discussion
6. Conclusions
7. Patents
Author Contributions
Funding
Conflicts of Interest
References
- Xiao, X.N.; Wang, P.; Chen, M. Secondary Voltage Control in an Islanded Microgrid Based on Distributed Multi-Agent System. Trans. China Electr. Soc. 2018, 33, 1894–1902. [Google Scholar]
- Yu, X.W.; She, X.; Ni, X.J.; Huang, A.Q. System Integration and Hierarchical Power Management Strategy for a Solid-state Transformer Interfaced Microgrid System. IEEE Trans. Power Electr. 2014, 29, 4414–4425. [Google Scholar] [CrossRef]
- Li, P.; Zheng, M.M.; Chen, A.W.; Han, J.P. Optimal Operation of Hybrid AC/DC Microgrid Based on Memetic Algorithm. Proc. CSEE 2018, 38, 3226–3234. [Google Scholar]
- Wang, L.; Lam, C.S.; Wong, M.C. Multifunctional Hybrid Structure of SVC and Capacitive Grid-Connected Inverter (SVC//CGCI) for Active Power Injection and Nonactive Power Compensation. IEEE Trans. Ind. Electr. 2019, 66, 1660–1670. [Google Scholar] [CrossRef]
- Yong, J.; Xu, X.; Zeng, L.Q.; Li, L.L. Research Overview of Low Voltage DC Power Supply System. Proc. CSEE 2013, 33, 42–52. [Google Scholar]
- Dragicevic, T.; Guerrero, J.M.; Vasquez, J.C.; Skrlec, D. Supervisory Control of an Adaptive-droop Regulated DC Microgrid with Battery Management Capability. IEEE Trans. Power Electr. 2014, 29, 695–706. [Google Scholar] [CrossRef]
- Rahmani-Andebili, M.; Fotuhi-Firuzabad, M. An Adaptive Approach for PEVs Charging Management and Reconfiguration of Electrical Distribution System Penetrated by Renewables. IEEE Trans. Ind. Inf. 2018, 14, 2001–2010. [Google Scholar] [CrossRef]
- Rahmani-Andebili, M. Dynamic and Adaptive Reconfiguration of Electrical Distribution System Including Renewables Applying Stochastic Model Predictive Control. IET Gen. Trans. Distrib. 2017, 11, 3912–3921. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Shu, J.; Wu, C.H.; Zhou, L.H.; Song, X.R. Island Microgrid Based on Distributed Photovoltaic Generation. Power Syst. Prot. Control 2014, 42, 55–61. [Google Scholar]
- Papadaskalopoulos, D.; Pudjianto, D.; Strbac, G. Decentralized Coordination of Microgrids with Flexible Demand and Energy Storage. IEEE Trans. Sustain. Energy 2014, 5, 1406–1414. [Google Scholar] [CrossRef]
- Karimi, Y.; Oraee, H.; Golsorkhi, M.S.; Guerrero, J.M. Decentralized Method for Load Sharing and Power Management in a PV/Battery Hybrid Source Islanded Microgrid. IEEE Trans. Power Electr. 2017, 32, 6135–6144. [Google Scholar] [CrossRef]
- Gamboa, G.; Hamilton, C.; Kerley, R.; Elmes, S.; Arias, A.; Shen, J.; Batarseh, I. Control Strategy of a Multi-port Grid Connected Direct DC PV Charging Station for Plug-in Electric Vehicles. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010. [Google Scholar]
- Benidris, M.; Elsaiah, S.; Sulaeman, S.; Mitra, J. Transient Stability of Distributed Generators in the Presence of Energy Storage Devices. In Proceedings of the 44th IEEE North American Power Symposium, Champaign, IL, USA, 9–11 September 2012. [Google Scholar]
- Rahmani-Andebili, M. Stochastic, Adaptive, and Dynamic Control of Energy Storage Systems Integrated with Renewable Energy Sources for Power Loss Minimization. Renew. Energy 2017, 113, 1462–1471. [Google Scholar] [CrossRef]
- Rahmani-Andebili, M. Cooperative Distributed Energy Scheduling in Microgrids. In Electric Distribution Network Management and Control; Springer: New York, NY, USA, 2018; pp. 235–254. [Google Scholar]
- Salamonsson, D.; Sannino, A. Low-voltage dc Distribution System for Commercial Power Systems with Sensitive Electronic Loads. IEEE Trans. Power Deliv. 2007, 22, 1620–1627. [Google Scholar] [CrossRef]
- Feng, W.; Sun, K.; Guan, Y.J.; Guerrero, J.M. Active Control Strategy Based on Hierarchical Control for Grid Connected Harmonic Current in Microgrid. Trans. China Electrotech. Soc. 2018, 33, 1400–1409. [Google Scholar]
- Jiang, Y.X.; Li, Y.G.; Tian, Y.J.; Wang, L. Phase-Locked Loop Research of Grid-Connected Inverter Based on Impedance Analysis. Energies 2018, 11, 3077. [Google Scholar] [CrossRef]
- Gao, C.W.; Liu, X.M.; Chen, H.; Li, H.Y. Modelling and Operation Characteristics of Photovoltaic-Grid Complementary System. Trans. China Electrotech. Soc. 2017, 32, 200–207. [Google Scholar]
- Ghoddami, H.; Yazdani, A. A Mitigation Strategy for Temporary Over-voltages Caused by Grid-Connected Photovoltaic Systems. IEEE Trans. Energy Conver. 2015, 30, 413–420. [Google Scholar] [CrossRef]
- Yang, Y.H.; Zhou, K.L. Photovoltaic Cell Modeling and MPPT Control Strategies. Trans. China Electrotech. Soc. 2011, 26, 229–234. [Google Scholar]
- Fan, Z.F.; Bi, D.Q.; Ren, X.W.; Xue, T.L.; Chen, Y.G. Low Voltage Ride-through Control of the Photovoltaic/Battery Microgrid System. Power Syst. Prot. Control 2015, 43, 6–12. [Google Scholar]
- Mendis, N.; Muttaqi, K.M.; Perera, S. Management of Battery-supercapacitor Hybrid Energy Storage and Synchronous Condenser for Isolated Operation of PMSG Based Variable-speed Wind Turbine Generating Systems. IEEE Trans. Smart Grid 2014, 5, 944–953. [Google Scholar] [CrossRef]
- Lu, X.N.; Sun, K.; Guerrero, J.M.; Vasquez, J.C.; Huang, L.P. State-of-charge Balance Using Adaptive Droop Control for Distributed Energy Storage Systems in DC Microgrid Applications. IEEE Trans. Ind. Electr. 2014, 61, 2804–2815. [Google Scholar] [CrossRef]
- Liu, X.D.; Li, K. A novel sliding mode single-loop speed control method based on disturbance observer for permanent magnet synchronous motor drives. Adv. Mech. Eng. 2018, 10, 1–10. [Google Scholar] [CrossRef]
- Liu, Y.L.; Wang, H.; Guo, L. Composite Robust H-infinity Control for Uncertain Stochastic Nonllinear Systems with State Delay via a Disturbance Observer. IEEE Trans. Autom. Control 2018, 63, 4345–4352. [Google Scholar] [CrossRef]
- Anand, S.; Fernandes, B.G.; Guerrero, J.M. Distributed Control to Ensure Proportional Load Sharing and Improve Voltage Regulation in Low Voltage DC Microgrids. IEEE Trans. Power Electr. 2013, 28, 1900–1903. [Google Scholar] [CrossRef]
- Hamzeh, M.; Karimi, H.; Mokhtari, H. Harmonic and Negative-sequence Current Control in an Islanded Multi-bus MV Microgrid. IEEE Trans. Smart Grid 2014, 5, 167–176. [Google Scholar] [CrossRef]
- Zhu, S.S.; Wang, F.; Guo, H.; Wang, Q.F.; Gao, Y.X. Overview of Droop Control in DC Microgrid. Proc. CSEE 2018, 38, 72–84. [Google Scholar]
- Li, P.; Zhang, X.S.; Zhao, B.; Wang, Z.L.; Sun, J.L. Microgrid Design and Mode Switching Control Strategy for Multi Microgrid and Multiple Dot Networks. Autom. Electr. Power Syst. 2015, 39, 172–178. [Google Scholar]
- Han, R.K.; Meng, L.X.; Guerrero, J.M.; Vasquez, J.C. Distributed Nonlinear Control with Event-triggered Communication to Achieve Current-sharing and Voltage Regulation in DC Microgrids. IEEE Trans. Power Electr. 2017, 33, 6416–6433. [Google Scholar] [CrossRef]
- Liu, S.C.; Wang, X.Y.; Liu, P.X. Impact of Communication Delays on Secondary Frequency Control in an Islanded Microgrid. IEEE Trans. Ind. Electr. 2014, 62, 2021–2031. [Google Scholar] [CrossRef]
- Wu, T.F. Tracking Control of Wheeled Mobile Robots Using Fuzzy CMAC Neural Networks. J. Internet Technol. 2018, 19, 1853–1869. [Google Scholar]
- He, S.D.; Dai, S.L.; Luo, F. Aaymptotic Trajectory Tracking Control with Guaranteed Transient Behavior for MSV with Uncertain Dynamics and External Disturbances. IEEE Trans. Ind. Electr. 2019, 66, 3712–3720. [Google Scholar] [CrossRef]
- Chao, F.; Zhou, D.J.; Lin, C.M.; Zhou, C.L.; Shi, M.H.; Lin, D.Z. Fuzzy Cerebellar Model Articulation Controller Network Optimization Via Self-adaptive Global Best Harmony Search Algorithm. Soft Comput. 2018, 22, 3141–3153. [Google Scholar] [CrossRef]
- Macnab, C.J.B. Comments on An intelligent CMAC-PD torque controller with anti-over-learning scheme for electric load simulator. Trans. Instit. Meas. Control 2018, 40, 1741–1745. [Google Scholar] [CrossRef]
- Lakshmi, M.; Hemamalini, S. Nonisolated High Gain DC-DC Converter for DC Microgrids. IEEE Trans. Ind. Electr. 2018, 65, 1205–1212. [Google Scholar] [CrossRef]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Chen, K.; Lyu, L.; Cai, G. Research on the Operation Control Strategy of a Low-Voltage Direct Current Microgrid Based on a Disturbance Observer and Neural Network Adaptive Control Algorithm. Energies 2019, 12, 1162. https://doi.org/10.3390/en12061162
Zhang L, Chen K, Lyu L, Cai G. Research on the Operation Control Strategy of a Low-Voltage Direct Current Microgrid Based on a Disturbance Observer and Neural Network Adaptive Control Algorithm. Energies. 2019; 12(6):1162. https://doi.org/10.3390/en12061162
Chicago/Turabian StyleZhang, Liang, Kang Chen, Ling Lyu, and Guowei Cai. 2019. "Research on the Operation Control Strategy of a Low-Voltage Direct Current Microgrid Based on a Disturbance Observer and Neural Network Adaptive Control Algorithm" Energies 12, no. 6: 1162. https://doi.org/10.3390/en12061162
APA StyleZhang, L., Chen, K., Lyu, L., & Cai, G. (2019). Research on the Operation Control Strategy of a Low-Voltage Direct Current Microgrid Based on a Disturbance Observer and Neural Network Adaptive Control Algorithm. Energies, 12(6), 1162. https://doi.org/10.3390/en12061162