MPC with Constant Switching Frequency for Inverter-Based Distributed Generations in Microgrid Using Gradient Descent



Abstract
:1. Introduction
2. Predictive Voltage Control with Constant Switching Frequency based on Virtual State Vector
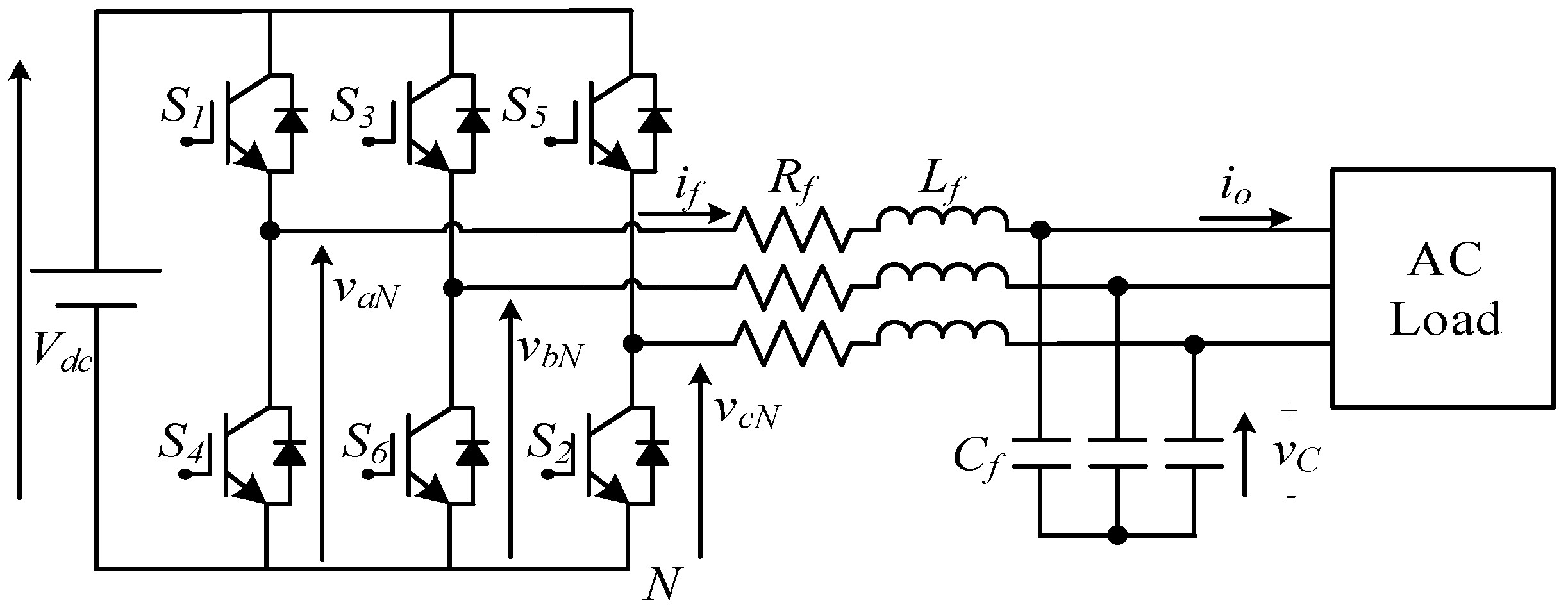
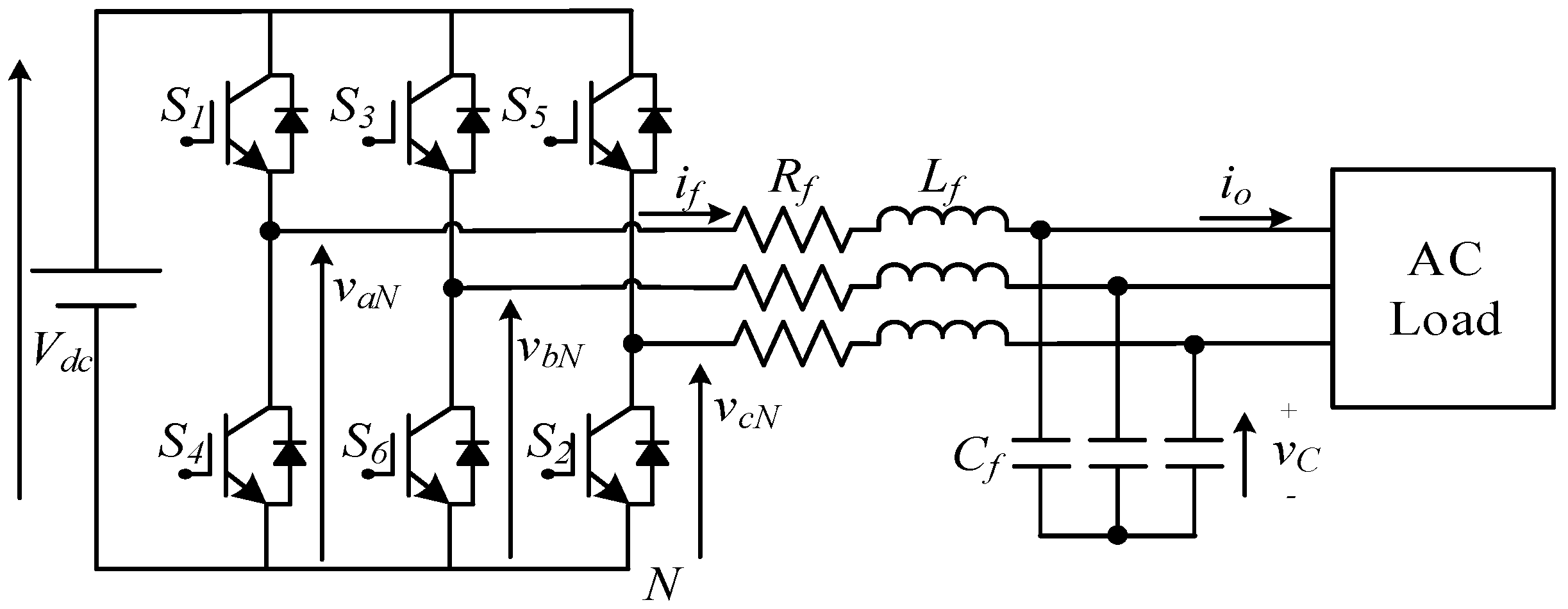
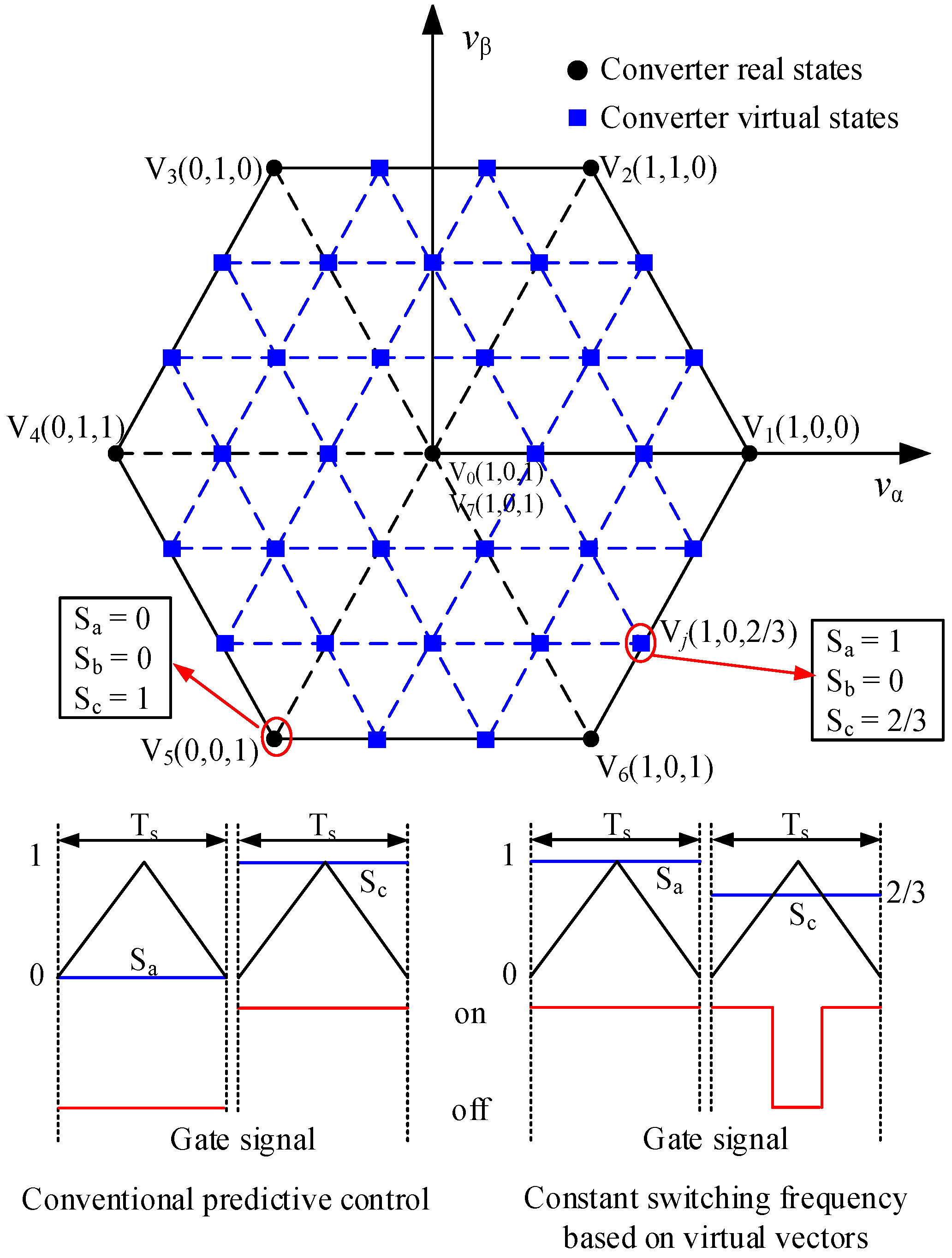
2.1. Conventional Predictive Voltage Control
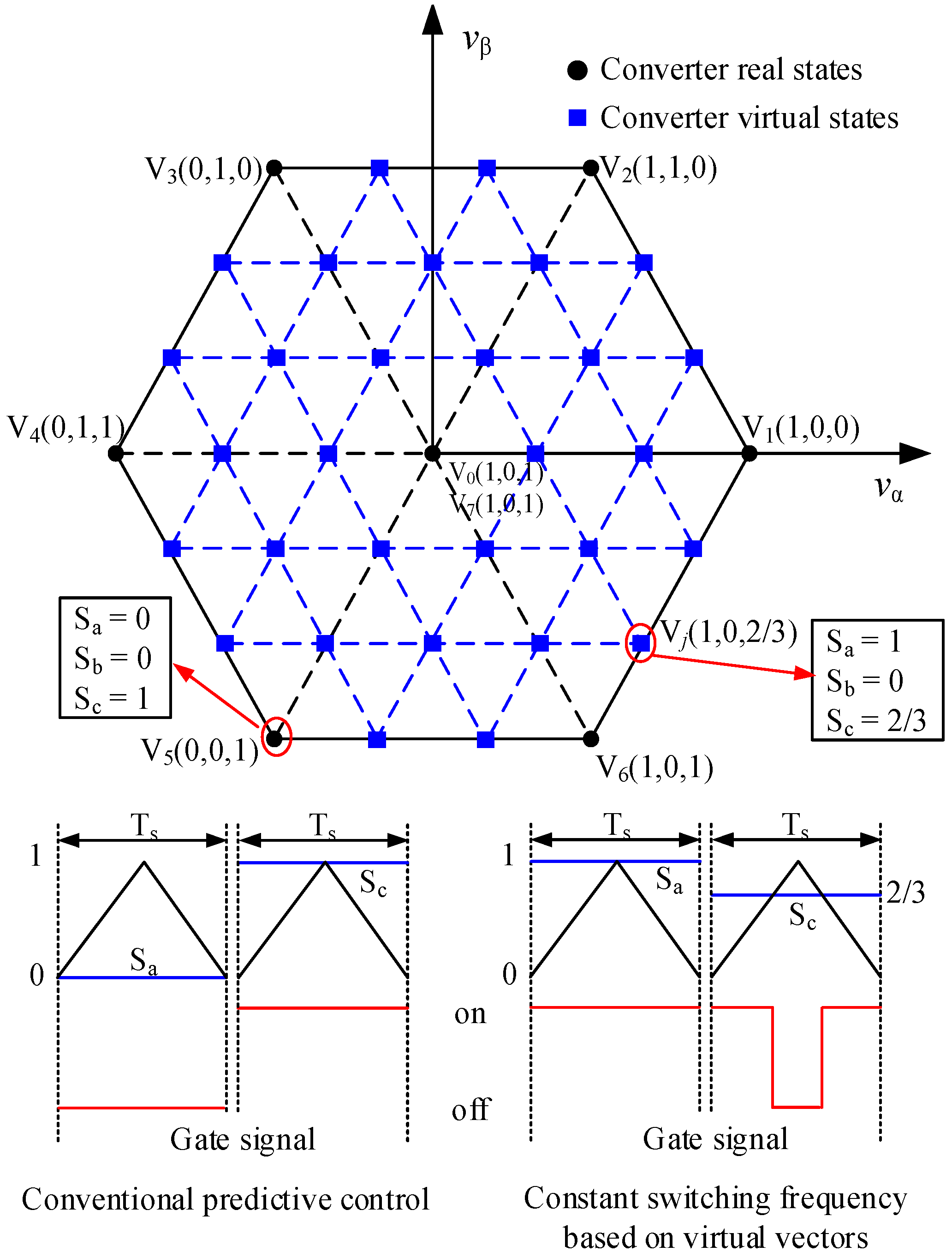
2.2. Predictive Voltage Control with Constant Switching Frequency Based on Virtual Vector
3. Proposed Predictive Voltage Control
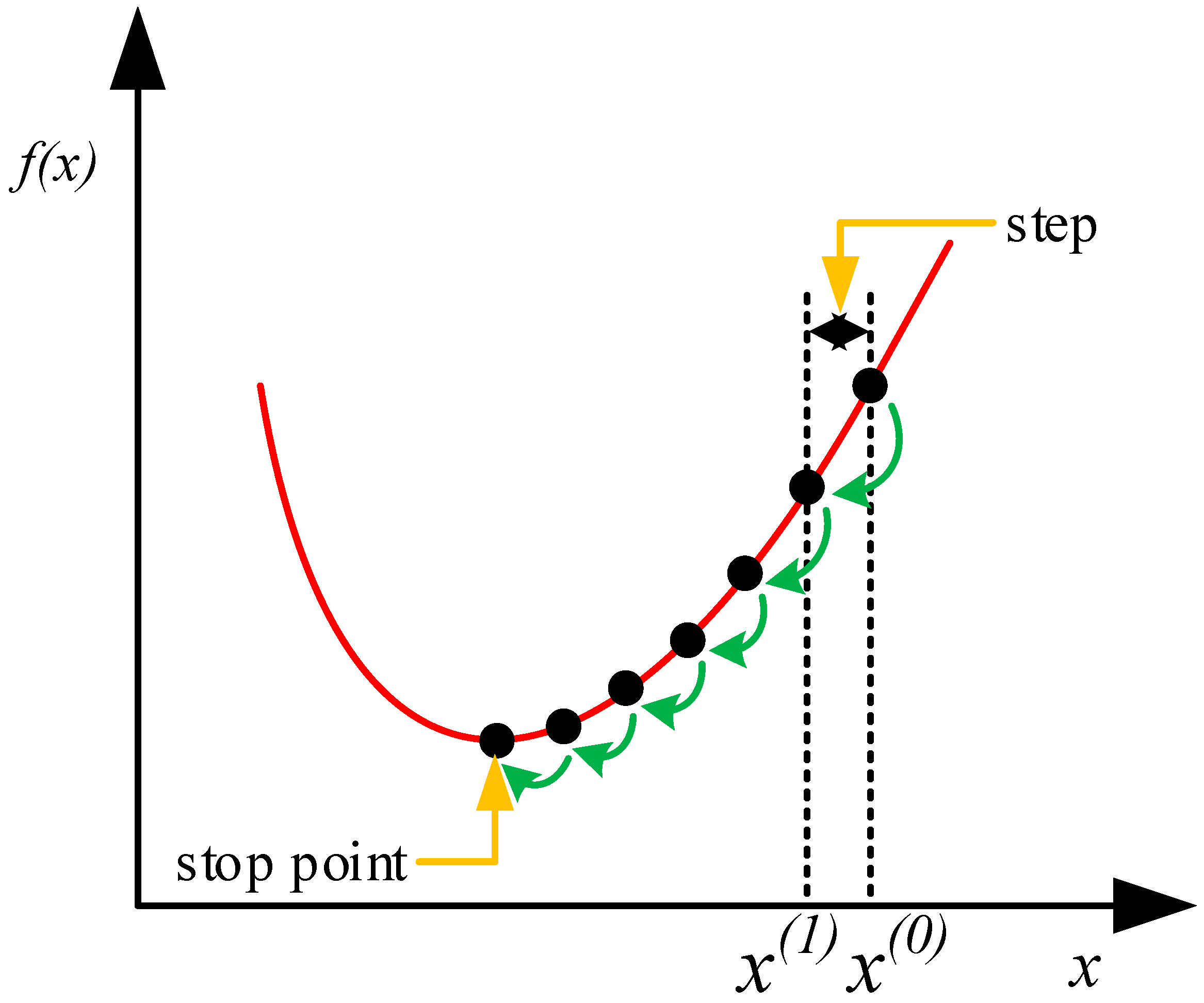
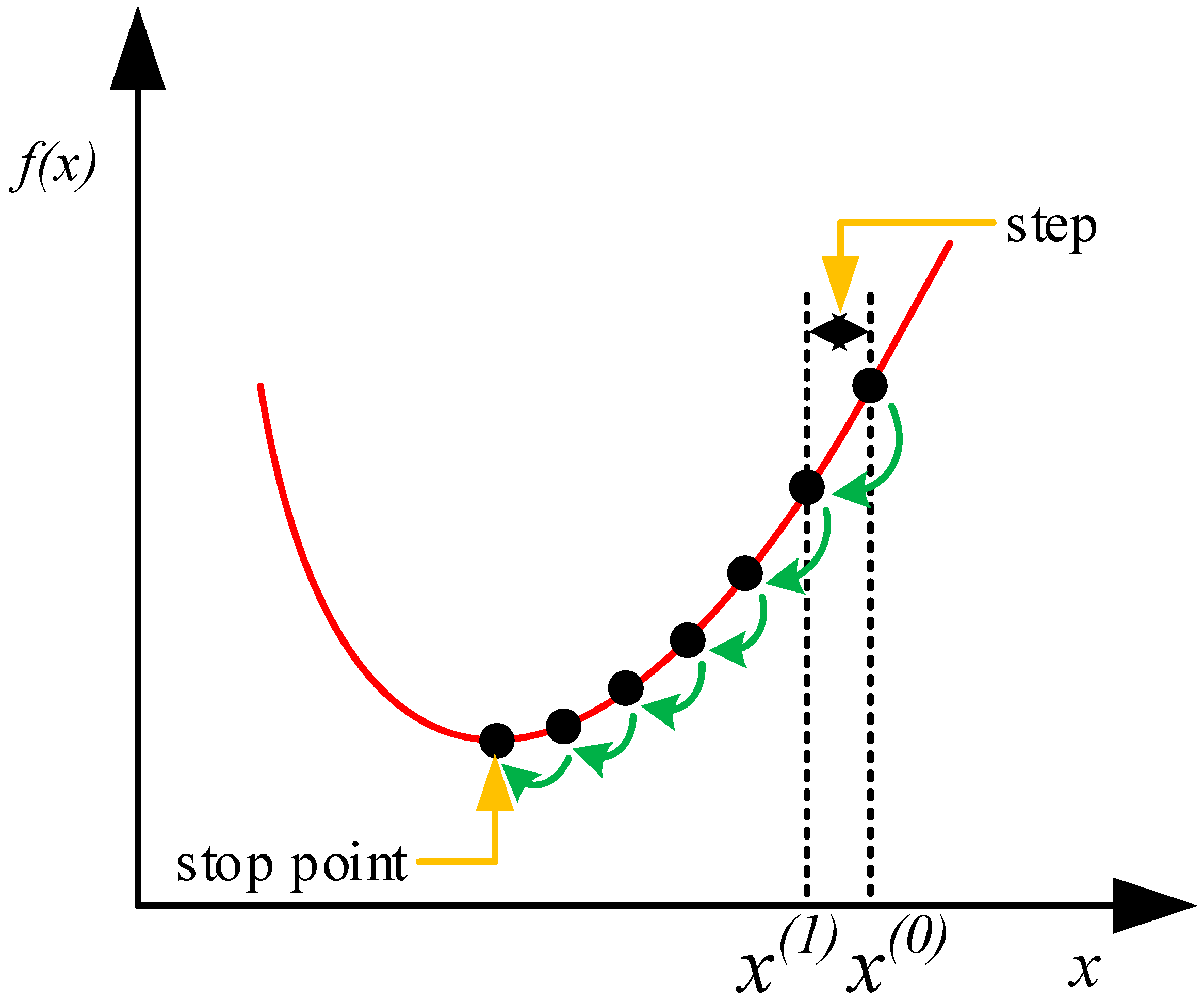
3.1. Gradient Descent
| Algorithm 1 Gradient descent |
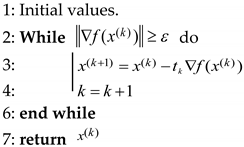 |
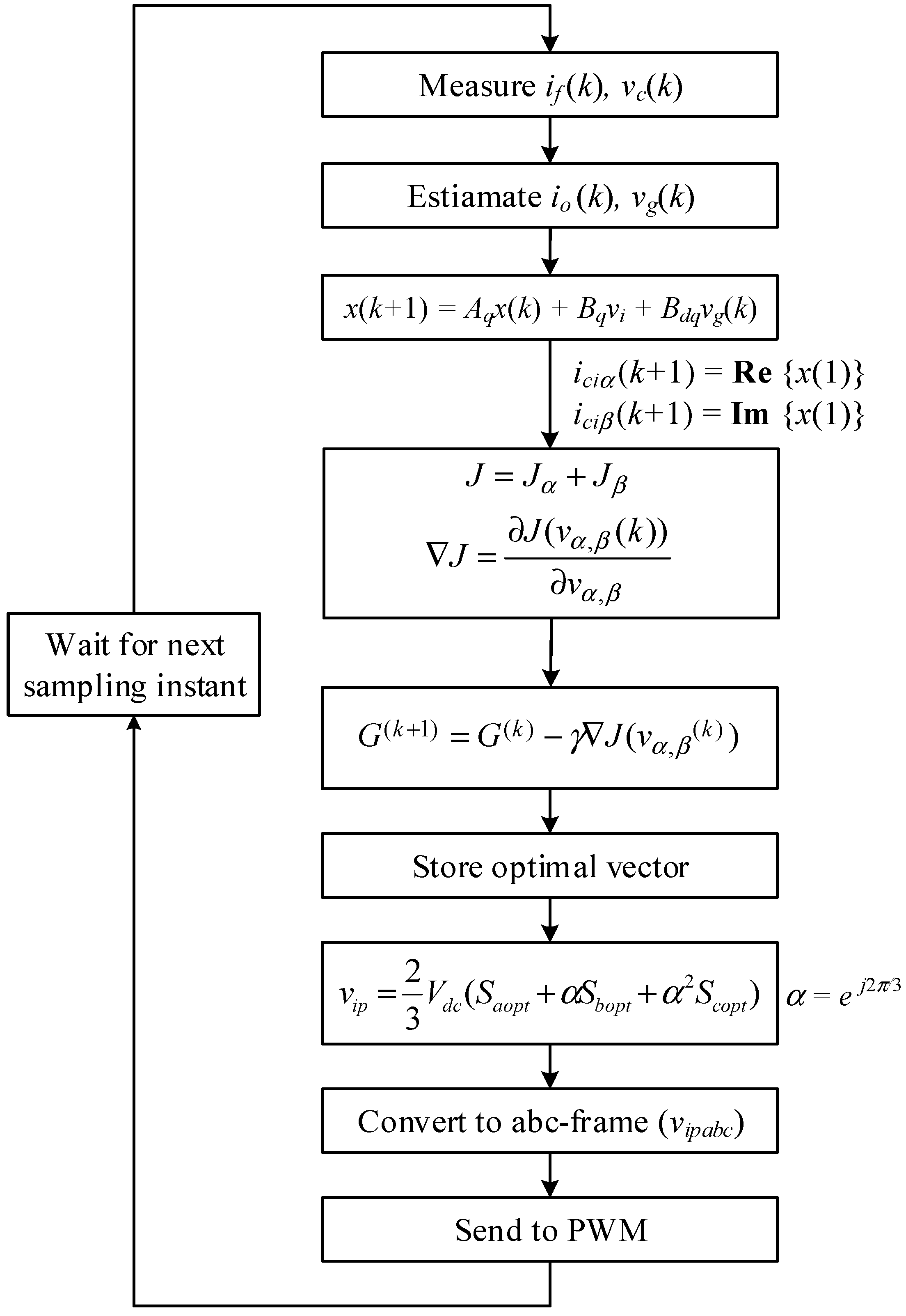
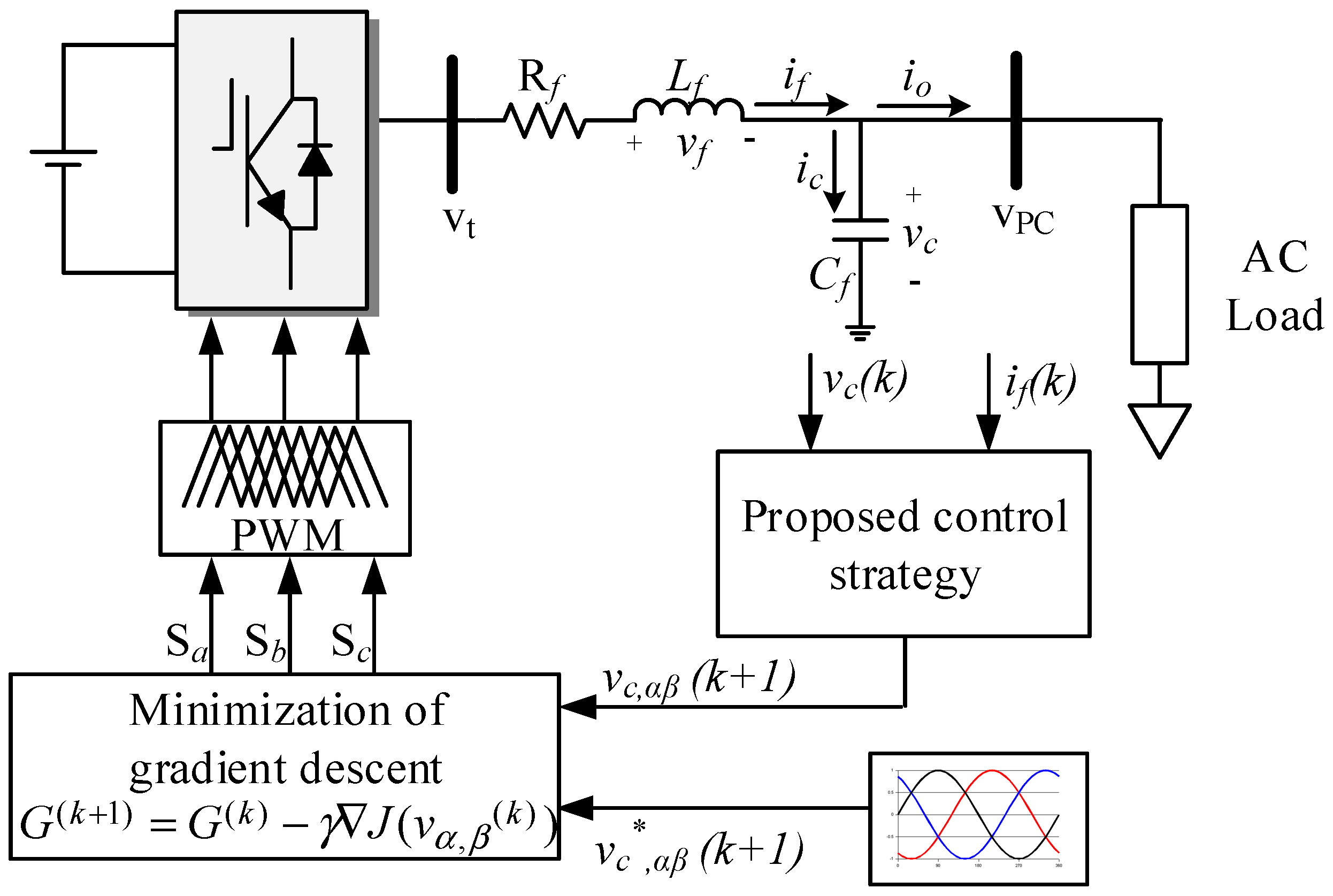
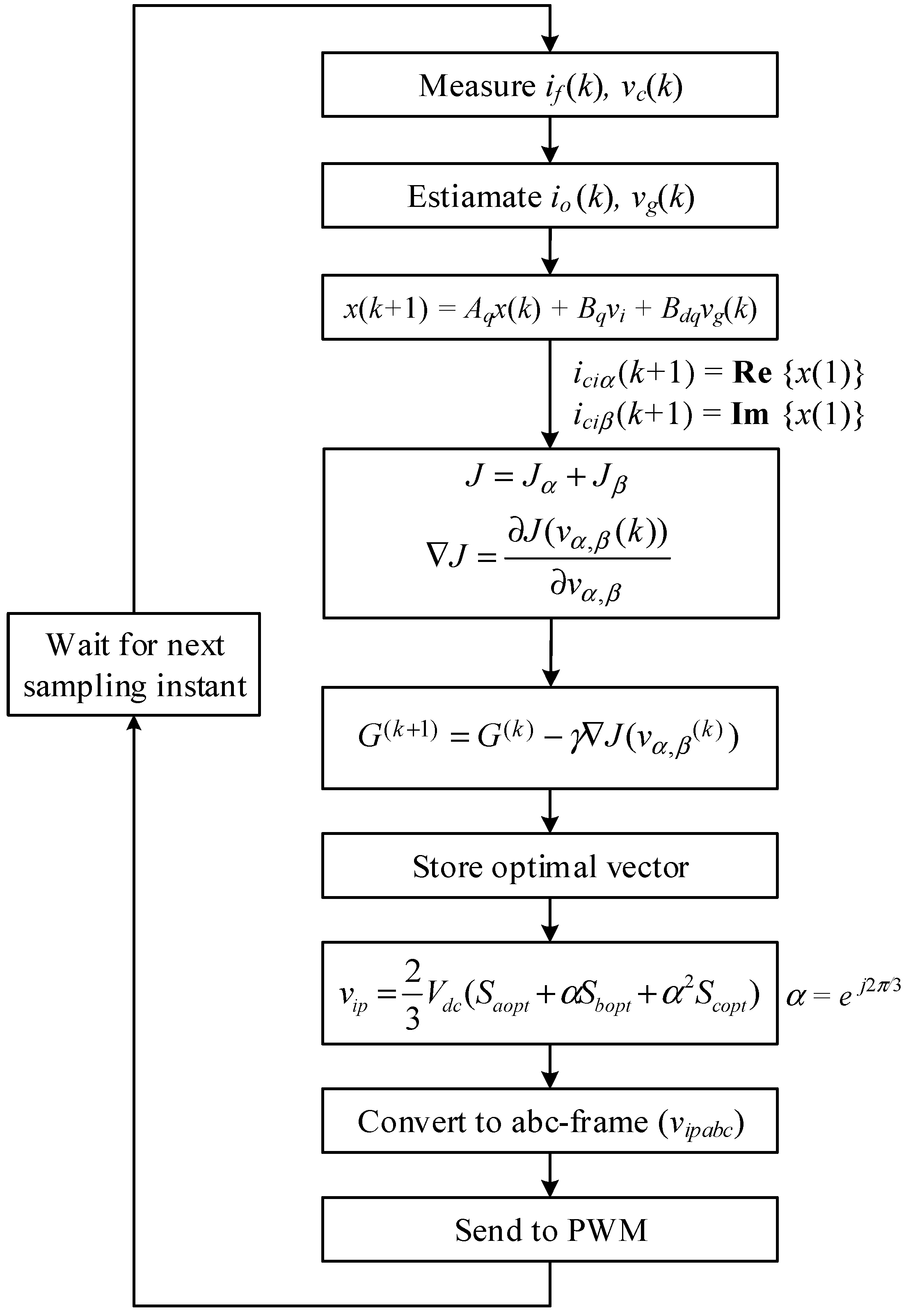
3.2. Proposed Predictive Control Strategy Based on Gradient Descent
4. Simulation Results
4.1. Single Converter Operation
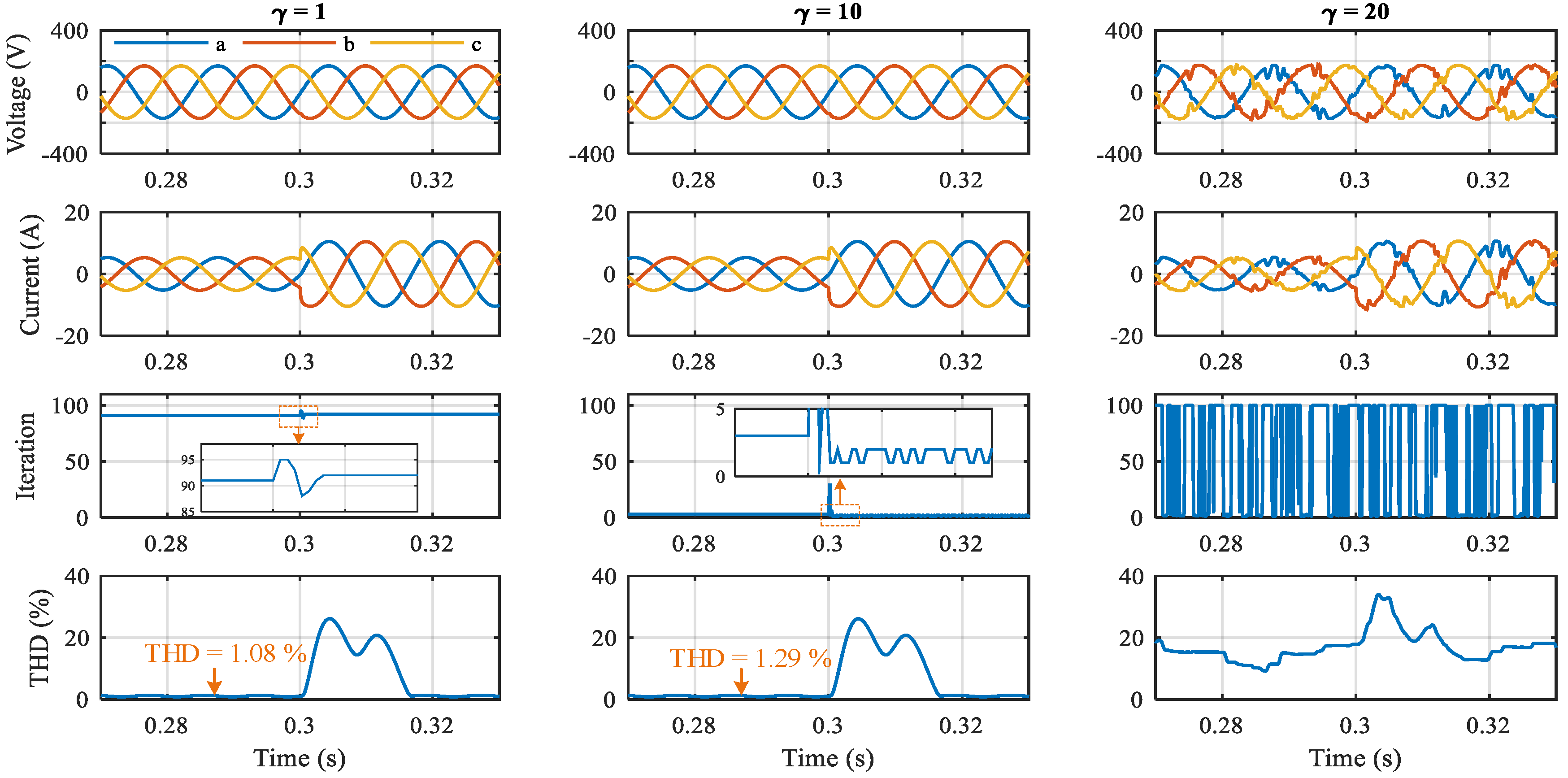
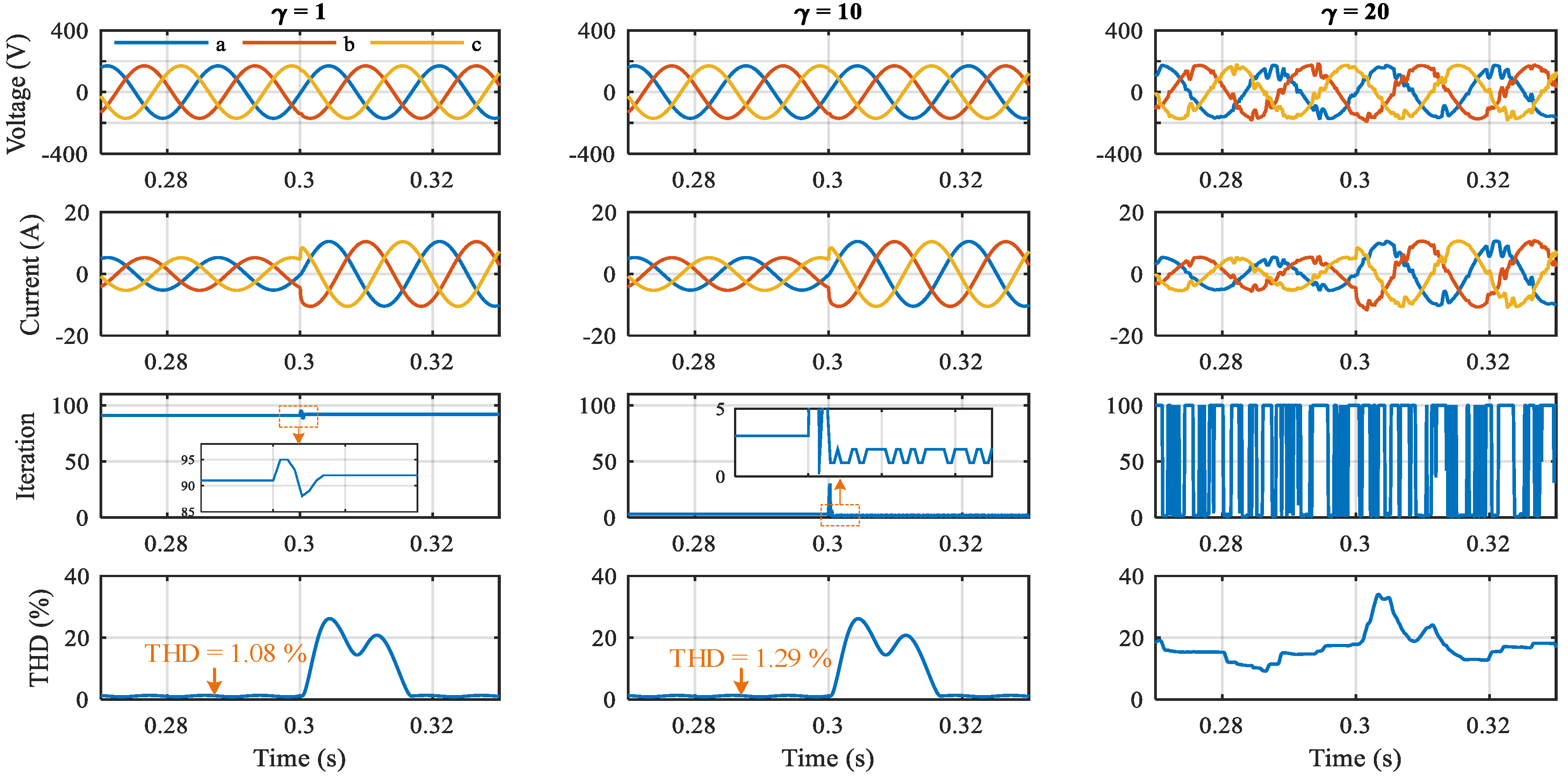
4.1.1. Effect of Learning Rate
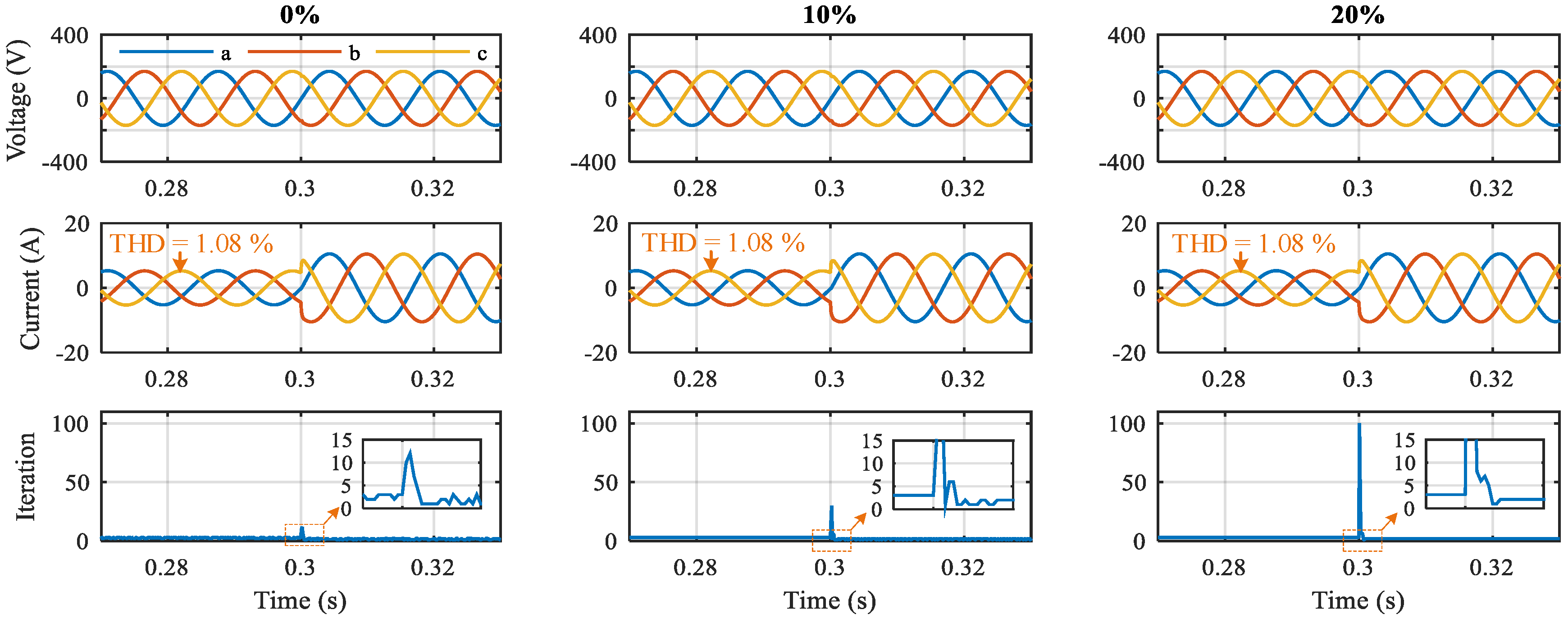
4.1.2. Effect of Uncertain Parameter
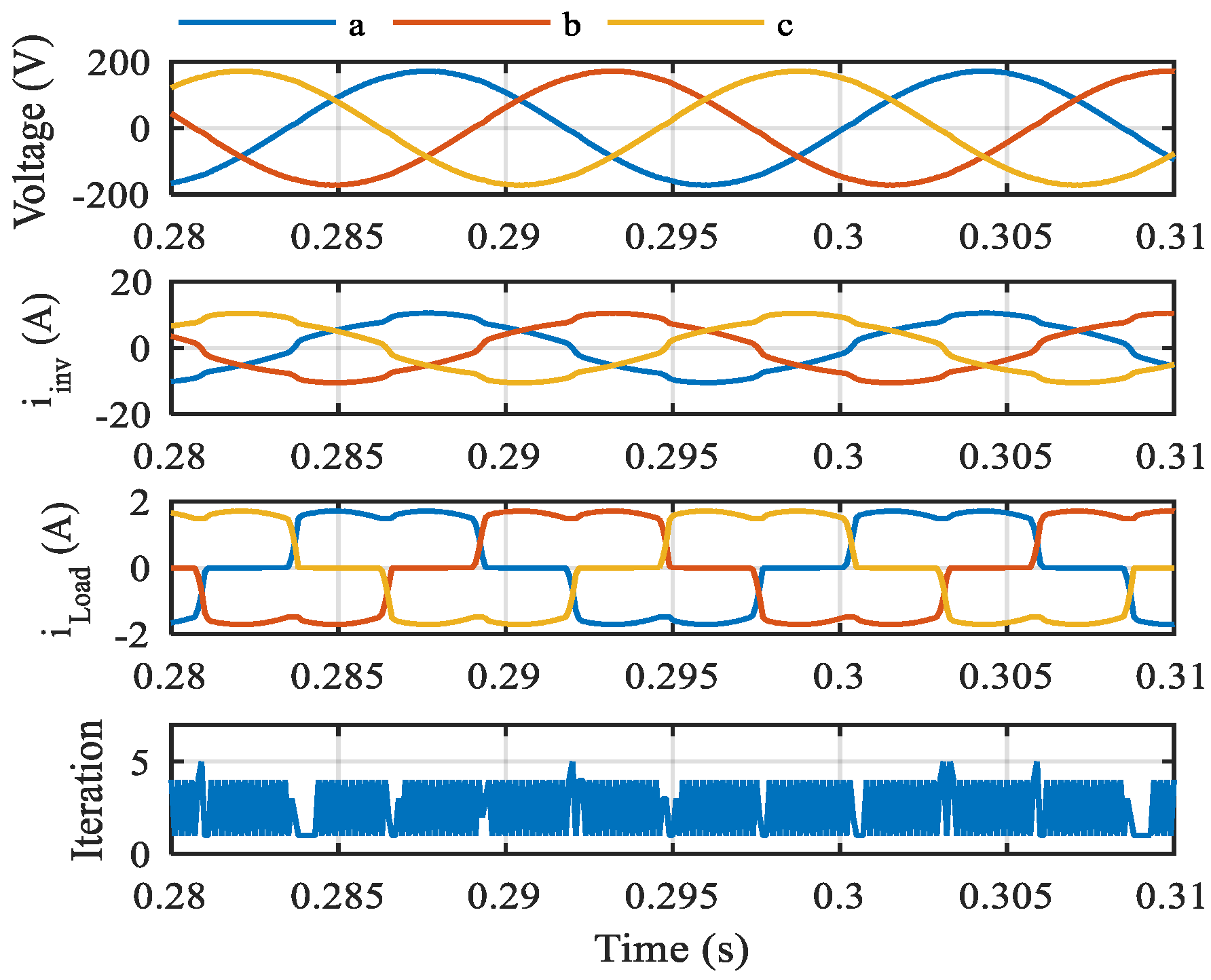
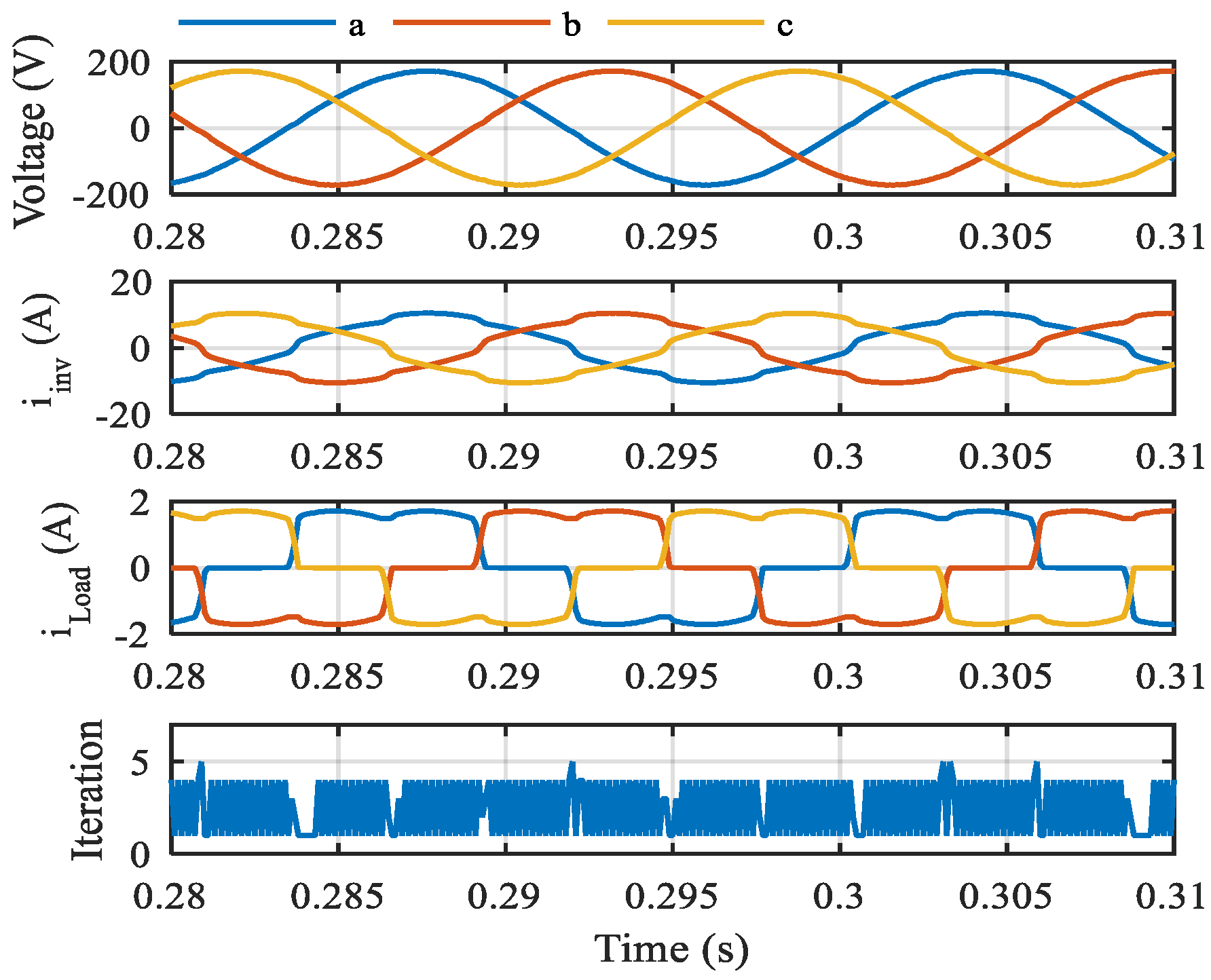
4.1.3. Nonlinear Load Condition
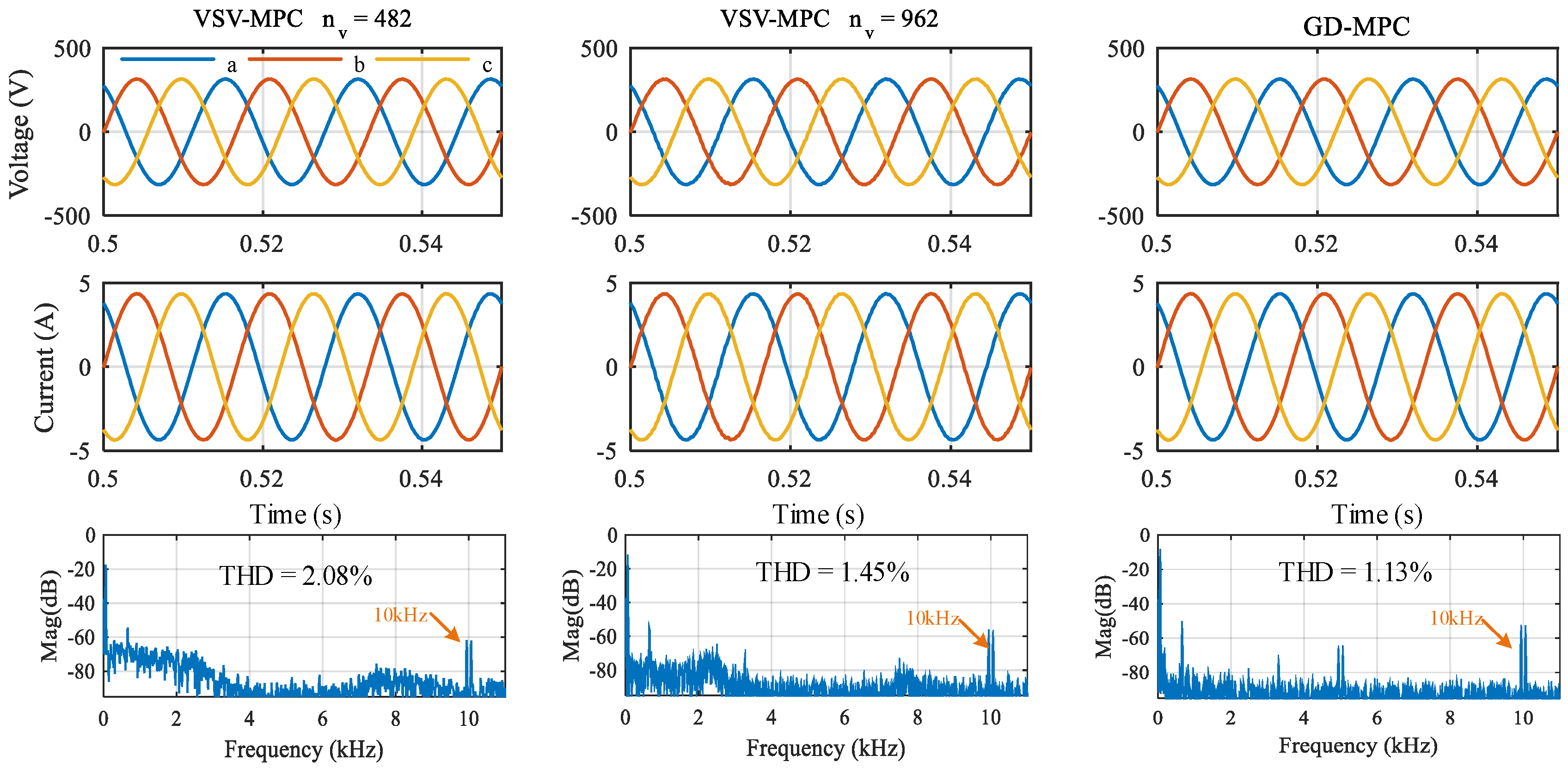
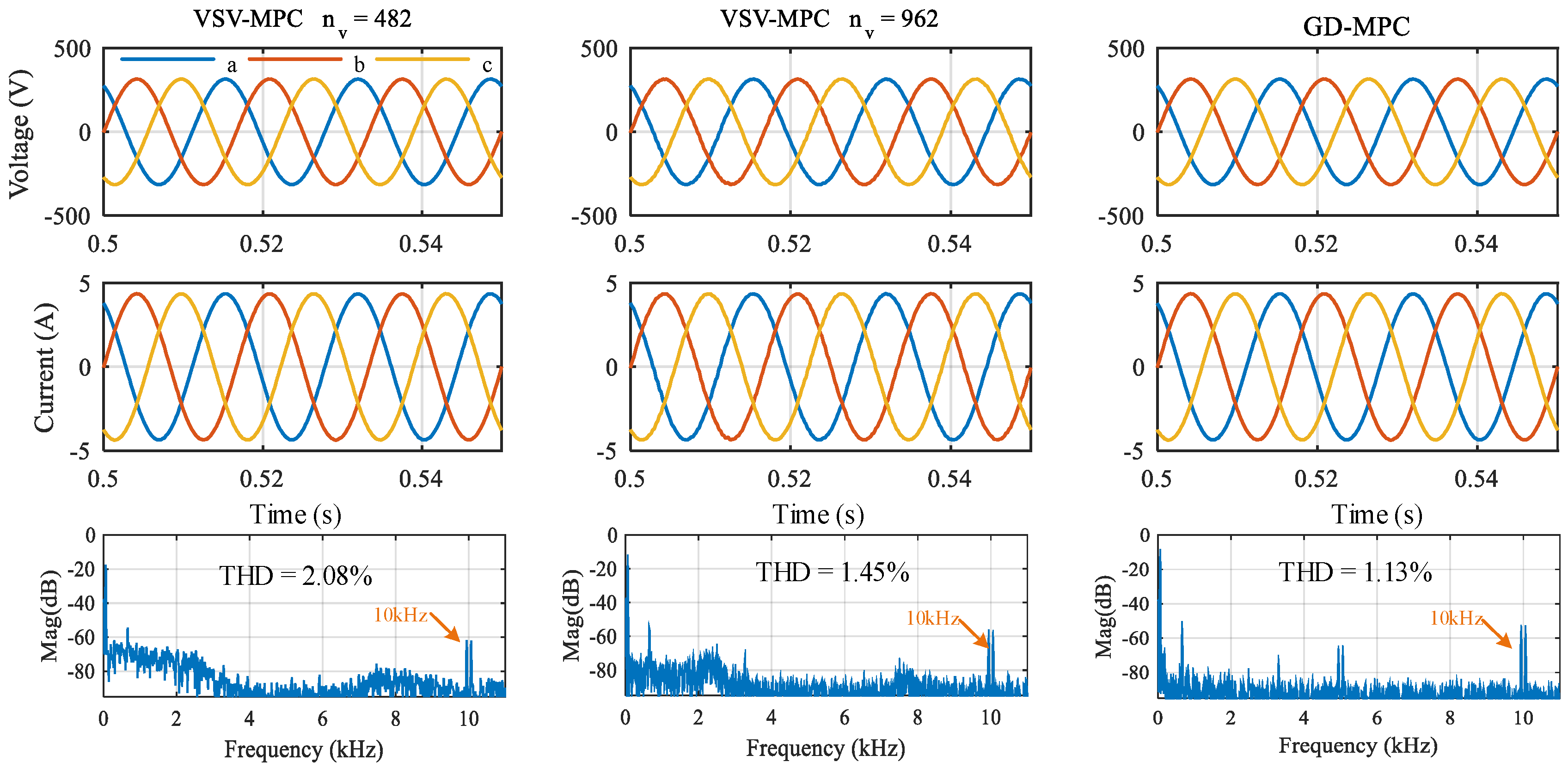
4.2. A Comparison Study
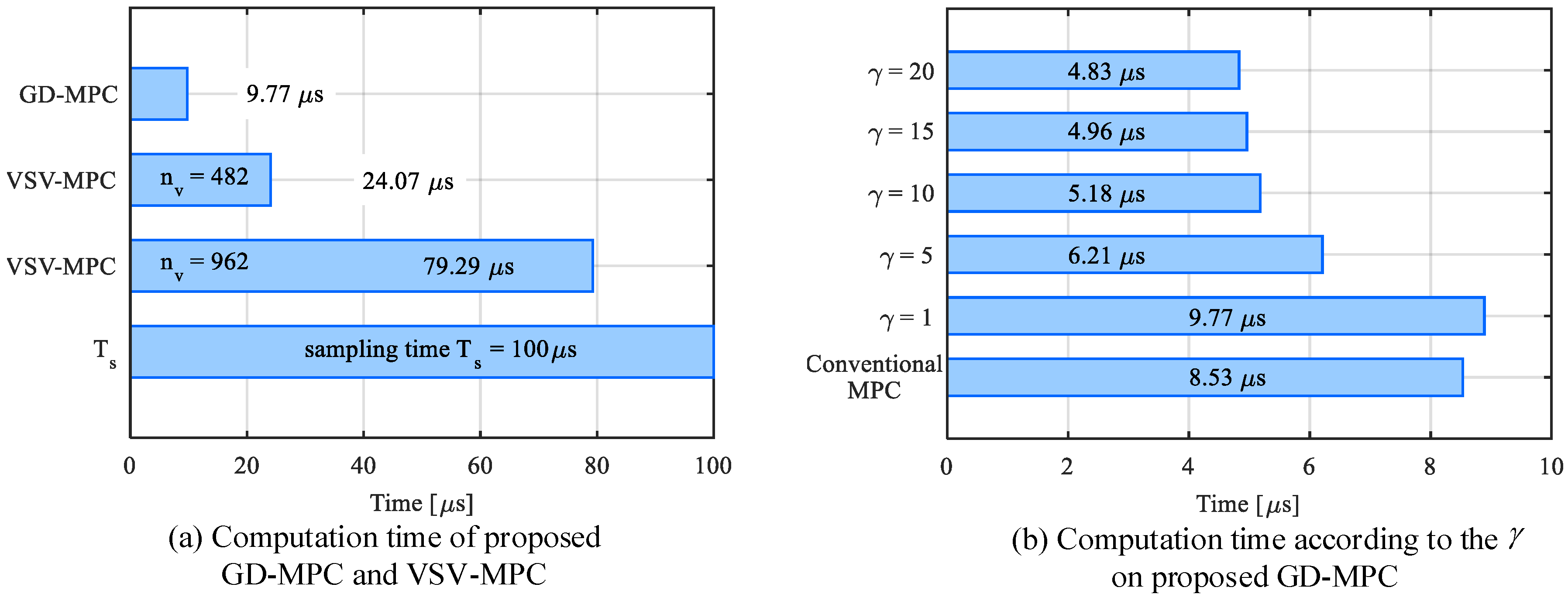
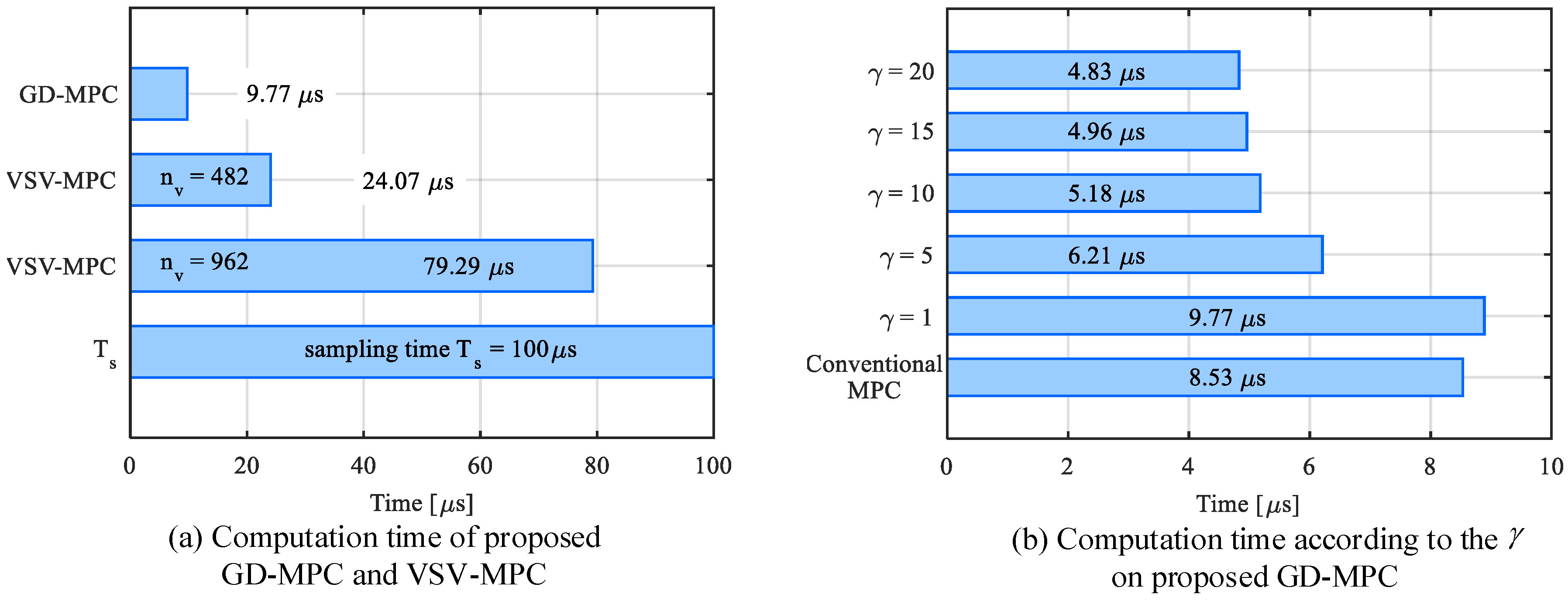
4.2.1. Computation Time
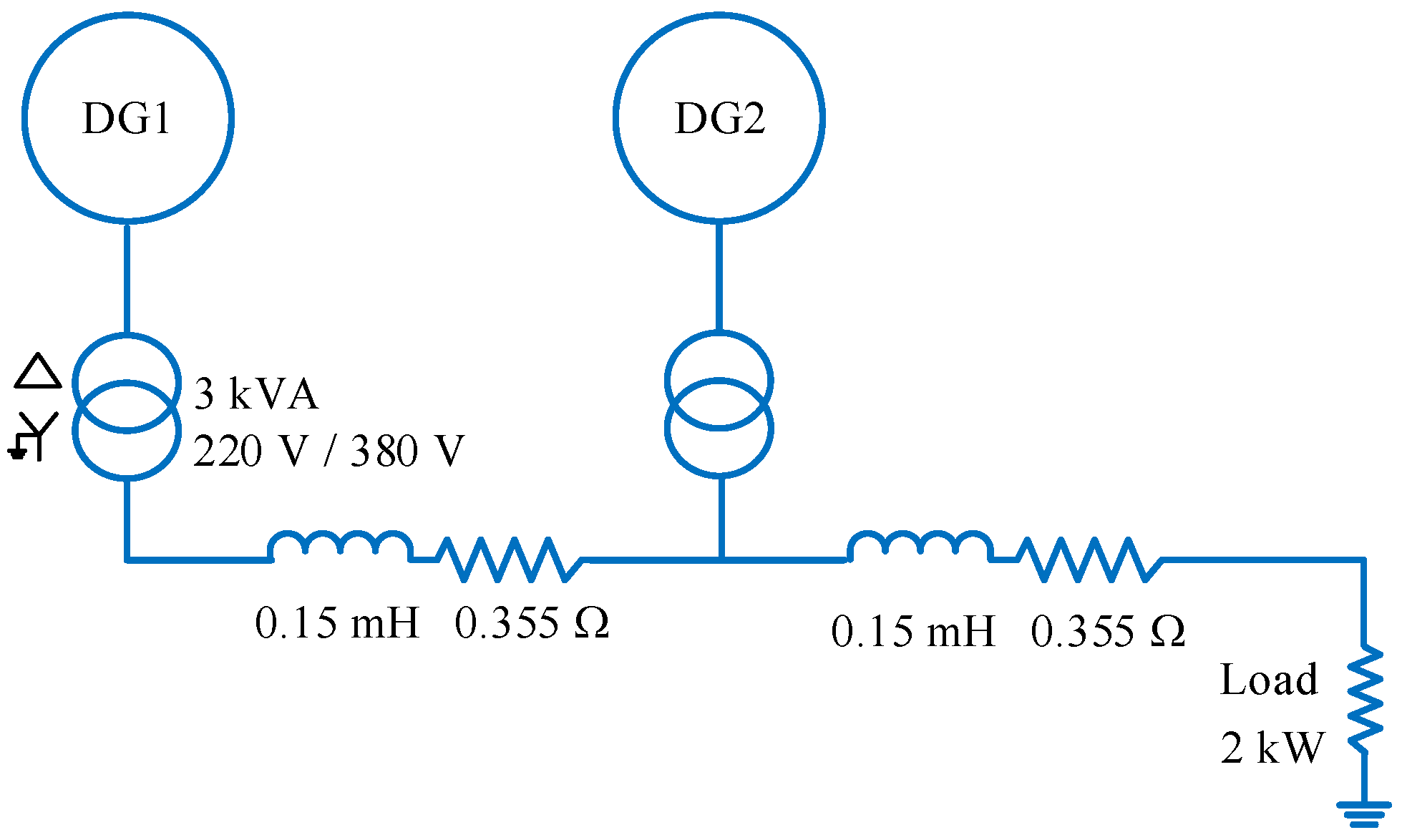
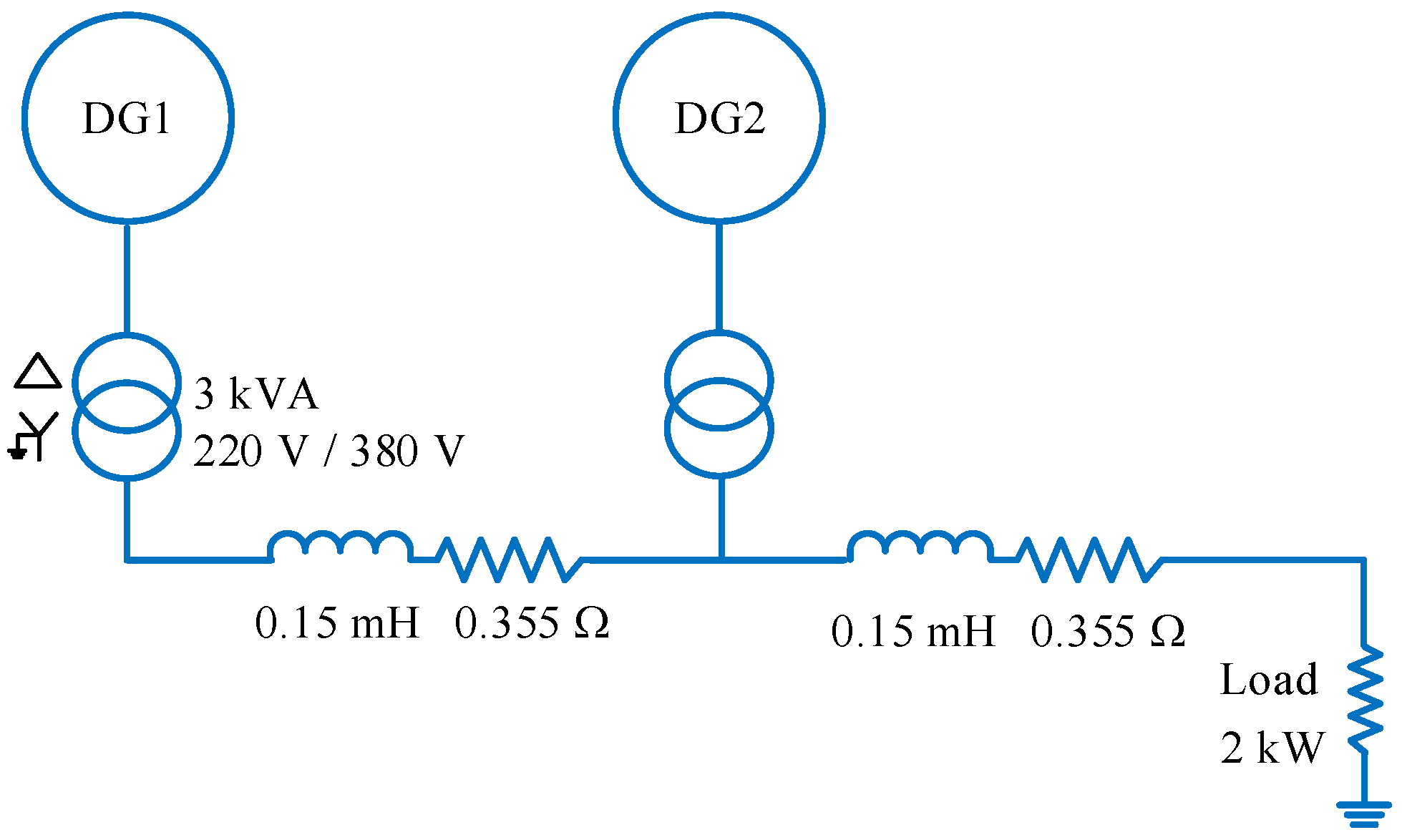
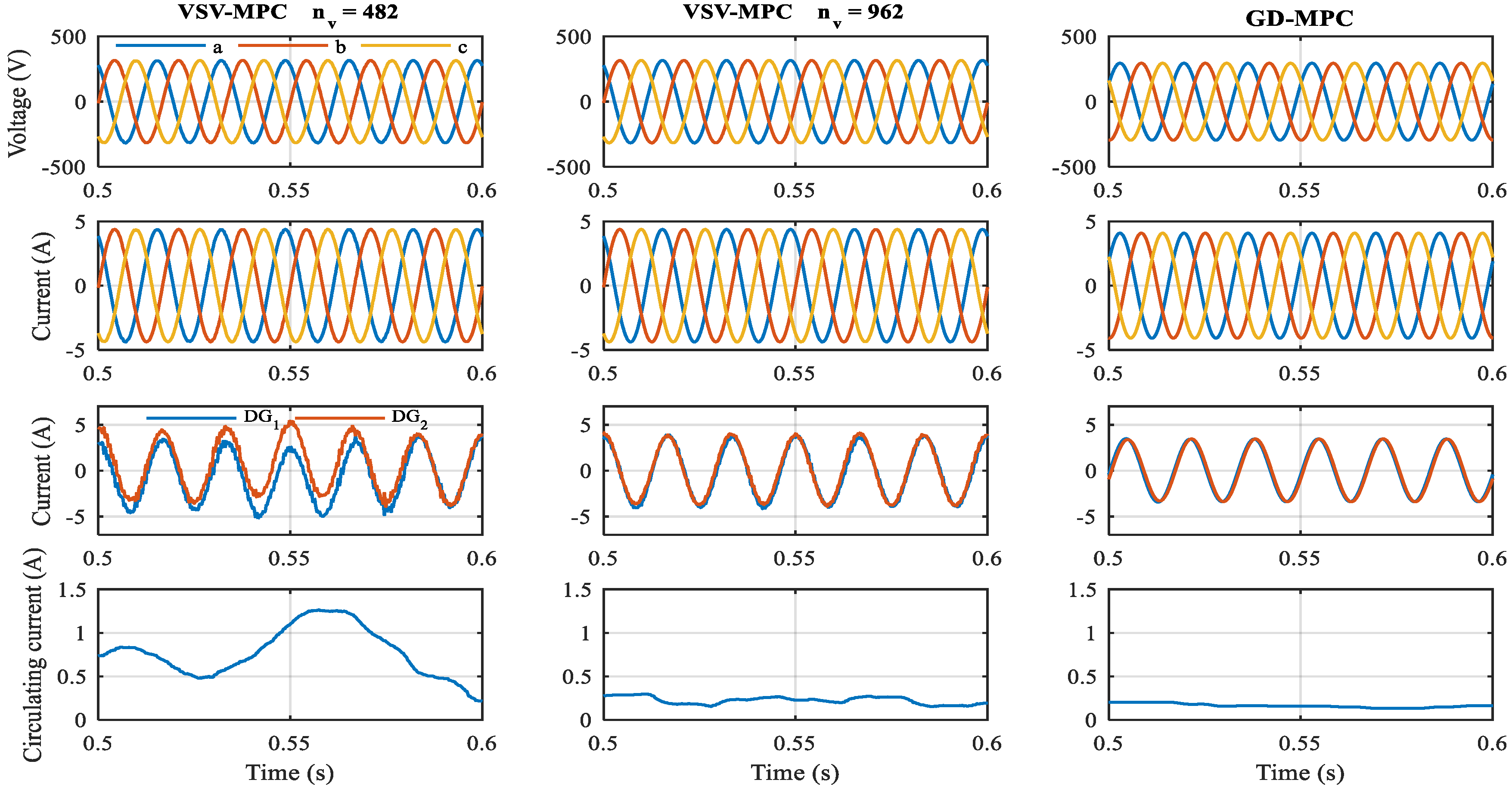
4.2.2. Parallel Operation of Inverters in Microgrid
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cort’es, P.; Kazmierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodr’iguez, J. Predictive control in power electronics and drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Kouro, S.; Cort’es, P.; Vargas, R.; Ammann, U.; Rodr’iguez, J. Model predictive control—A simple and powerful method to control power converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Nguyen, T.-T.; Yoo, H.-J.; Kim, H.-M. Analyzing the impacts of system parameters on MPC-based frequency control for a stand-alone microgrid. Energies 2017, 10, 417. [Google Scholar] [CrossRef]
- Bordons, C.; Montero, C. Basic principles of MPC for power converters: Bridging the gap between theory and practice. IEEE Ind. Electron. 2015, 9, 31–43. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Li, P.; Li, R.; Feng, H. Total harmonic distortion oriented finite control set model predictive control for single-phase inverters. Energies 2018, 11, 3467. [Google Scholar] [CrossRef]
- Sebaaly, F.; Vahedi, H.; Kanaan, H.Y.; Moubayed, N.; Al-Haddad, K. Finite control set model predictive controller for grid connected inverter design. In Proceedings of the 2016 IEEE International Conference on Industrial Technology, Taipei, Taiwan, 14–17 March 2016; pp. 1208–1213. [Google Scholar]
- Nguyen, T.-T.; Yoo, H.-J.; Kim, H.-M. Application of model predictive control to BESS for micorgrid control. Energies 20115, 8, 8798–8813. [Google Scholar] [CrossRef]
- Hu, S.; Liu, G.; Jin, N.; Gu, L. Constant-frequency model predictive direct power control for fault-tolerant bidirectional voltage-source converter with balanced capacitor voltage. Energies 2018, 11, 2692. [Google Scholar] [CrossRef]
- Tomlinson, M.; Mouton, T.; Kennel, R.; Stolze, P. A generic approach to implementing finite-set model predictive control with a fixed switching frequency. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronic, Istanbul, Turkey, 1–4 June 2014; pp. 330–335. [Google Scholar]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Carrasco, J.M.; Martinez, O.; Rodriguez, J.; Cortes, P.; Kour, S. Model predictive control with constant switching frequency using a discrete space vector modulation with virtual state vectors. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Gippsland, Australia, 10–13 February 2009; pp. 1–6. [Google Scholar]
- Nguyen, T.H.; Kim, K.-H. Finite Control Set–Model Predictive Control with Modulation to Mitigate Harmonic Component in Output Current for a Grid-Connected Inverter under Distorted Grid Conditions. Energies 2017, 10, 907. [Google Scholar] [CrossRef]
- Tarisciotti, L.; Zanchetta, P.; Watson, A.; Bifaretti, S.; Clare, J.C. Modulated model predictive control for a seven-level cascaded H-bridge back-to-back converter. IEEE Trans. Ind. Electron. 2014, 61, 5375–5383. [Google Scholar] [CrossRef]
- Vijayagopal, M.; Empringham, L.; Lillo, L.D.; Tarisciotti, L.; Zanchetta, T.; Wheeler, P. Control of a direct matrix converter induction motor drive with modulated model predictive control. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition, Montreal, QC, Canada, 20–24 September 2015; pp. 4315–4321. [Google Scholar]
- Tarisciotti, L.; Zanchetta, P.; Watson, A.; Clare, J.C.; Degano, M.; Bifaretti, S. Modulated model predictive control for a three-phase active rectifier. IEEE Trans. Ind. Appl. 2015, 51, 1610–1620. [Google Scholar] [CrossRef]
- Rabbeni, R.; Tarisciotti, L.; Gaeta, A.; Formentini, A.; Zanchetta, P.; Pucci, M.; Degano, M.; Rivera, M. Finite states modulated model predictive control for active power filtering systems. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition, Montreal, QC, Canada, 20–24 September 2015; pp. 1556–1562. [Google Scholar]
- Rivera, M.; Urive, C.; Tarisciotti, L.; Wheeler, P.; Zanchetta, P. Predictive control of an indirect matrix converter operating at fixed switching frequency and unbalanced AC-supply. In Proceedings of the 2015 IEEE International Symposium on Predictive Control of Electrical Drives and Power Electronics, Valparaiso, Chile, 5–6 October 2015; pp. 38–43. [Google Scholar]
- Yang, Y.; Wen, H.; Li, D. A fast and fixed switching frequency model predictive control with delay compensation for three-phase inverters. IEEE Access. 2017, 5, 17904–17913. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriquez, J.; Quevedo, D.E.; Silva, C. Predictive current control strategy with imposed load current spectrum. IEEE Trans. Power Electron. 2008, 23, 612–618. [Google Scholar] [CrossRef]
- Ramirez, R.O.; Espinoza, J.R.; Villarroel, F.A.; Maurelia, E.A.; Reyes, M.E.; Espinosa, E.E. A novel hybrid finite control set model predictive control scheme with reduced switching. IEEE Trans. Ind. Electron. 2013, 61, 5912–5920. [Google Scholar] [CrossRef]
- Rubinic, J.; Yaramasu, V.; Wu, B.; Zargari, N. Model predictive control of neutral-point clamped inverter with harmonic spectrum shaping. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition, Montreal, QC, Canada, 20–24 September 2015. [Google Scholar]
- Song, Z.; Xia, C.; Liu, T. Predictive current control of three-phase grid-connected converters with constant switching frequency for wind energy systems. IEEE Trans. Ind. Electron. 2013, 60, 2451–2464. [Google Scholar] [CrossRef]
- Aguirre, M.; Kouro, S.; Rojas, C.A.; Rodriquez, J.; Leon, J.I. Switching frequency regulation for FCS-MPC based on a period control approach. IEEE Trans. Ind. Electron. 2018, 65, 5764–5773. [Google Scholar] [CrossRef]
- Xue, C.; Song, W.; Wu, X.; Feng, X. A Constant switching frequency finite-control-set predictive current control scheme of a five-phase inverter with duty ratio optimization. IEEE Trans. Power Electron. 2018, 33, 3583–3594. [Google Scholar] [CrossRef]
- Xia, C.; Liu, T.; Shi, T. A simplified finite-control-set model-predictive control for power inverters. IEEE Trans. Ind. Inform. 2014, 10, 991–1002. [Google Scholar]
- Zhang, Y.; Xie, W.; Li, Z. Low-complexity model predictive power control: Double-vector-based approach. IEEE Trans. Ind. Electron. 2014, 61, 5871–5880. [Google Scholar] [CrossRef]
- Balamurali, A.; Feng, G.; Lai, C.; Tjong, J.; Akr, N.C. Maximum efficiency control of PMSM drives considering system losses using gradient descent algorithm based on dc power measurement. IEEE Trans. Energy Convers. 2018, 33, 2240–2249. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| - | Rating Power | 3 kW |
| V * | Nominal Bus Voltage | 380 V |
| f * | Nominal Bus Frequency | 60 Hz |
| Vdclink | DC Link Voltage | 380 V |
| Lf, Cf | LC Filter of DGs | 2 mH, 40 uF |
| fs | Switching Frequency | 10 kHz |
| - | Transformer | 220(Δ)/380(Y) |
| Rl, Ll | Line Impedance | 0.355 Ω, 0.15 mH |
| Ts | Sampling Time | 100 μs |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoo, H.-J.; Nguyen, T.-T.; Kim, H.-M. MPC with Constant Switching Frequency for Inverter-Based Distributed Generations in Microgrid Using Gradient Descent. Energies 2019, 12, 1156. https://doi.org/10.3390/en12061156
Yoo H-J, Nguyen T-T, Kim H-M. MPC with Constant Switching Frequency for Inverter-Based Distributed Generations in Microgrid Using Gradient Descent. Energies. 2019; 12(6):1156. https://doi.org/10.3390/en12061156
Chicago/Turabian StyleYoo, Hyeong-Jun, Thai-Thanh Nguyen, and Hak-Man Kim. 2019. "MPC with Constant Switching Frequency for Inverter-Based Distributed Generations in Microgrid Using Gradient Descent" Energies 12, no. 6: 1156. https://doi.org/10.3390/en12061156
APA StyleYoo, H.-J., Nguyen, T.-T., & Kim, H.-M. (2019). MPC with Constant Switching Frequency for Inverter-Based Distributed Generations in Microgrid Using Gradient Descent. Energies, 12(6), 1156. https://doi.org/10.3390/en12061156