Improved Perturb and Observation Method Based on Support Vector Regression

Abstract
1. Introduction
2. Materials and Methods
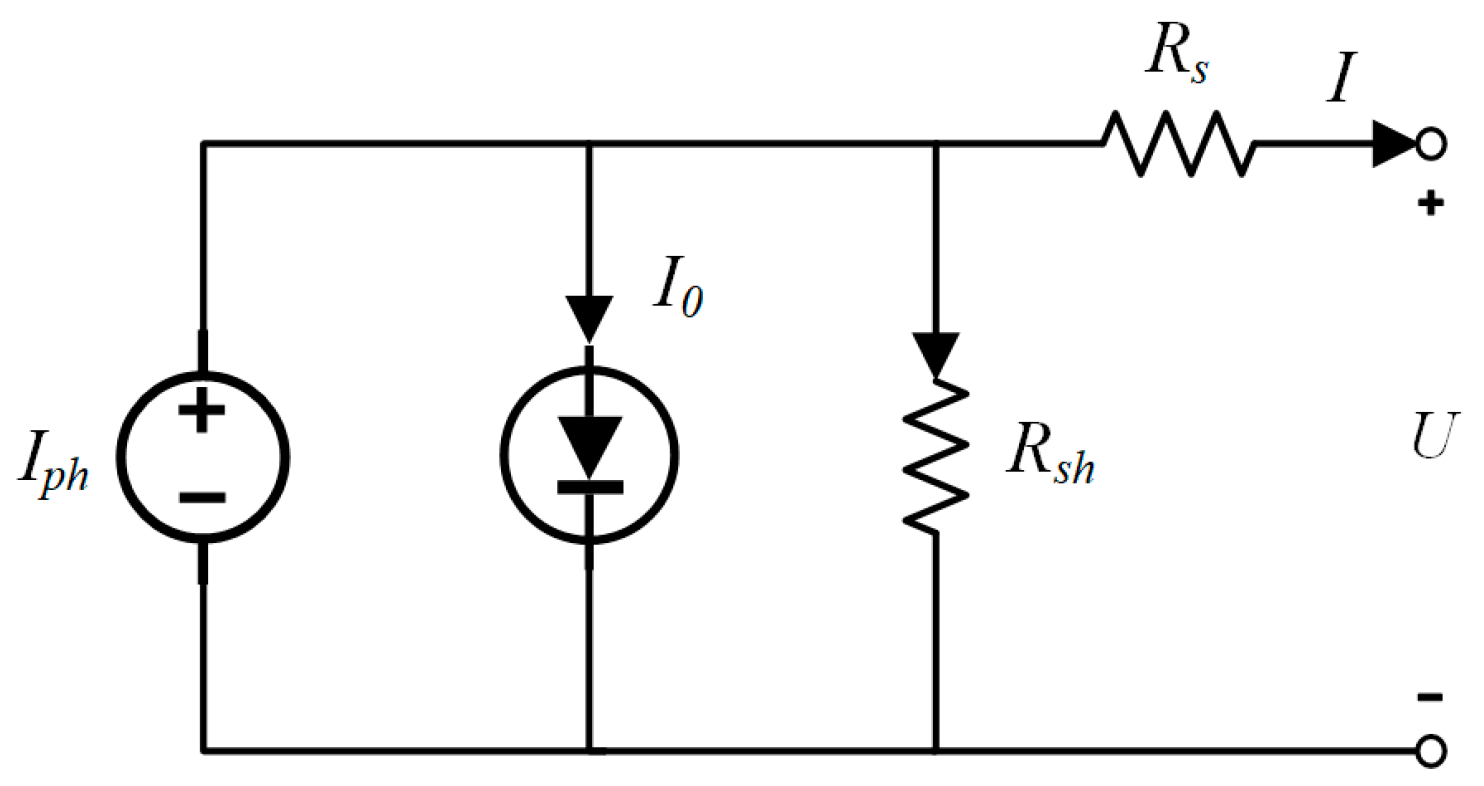
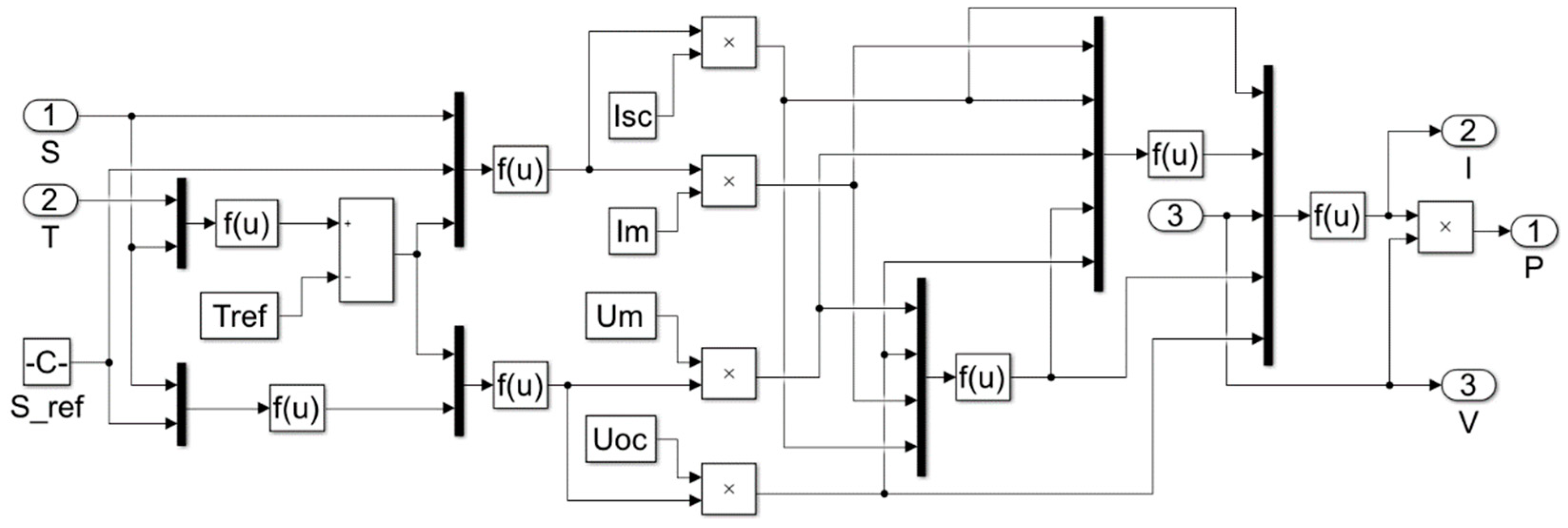
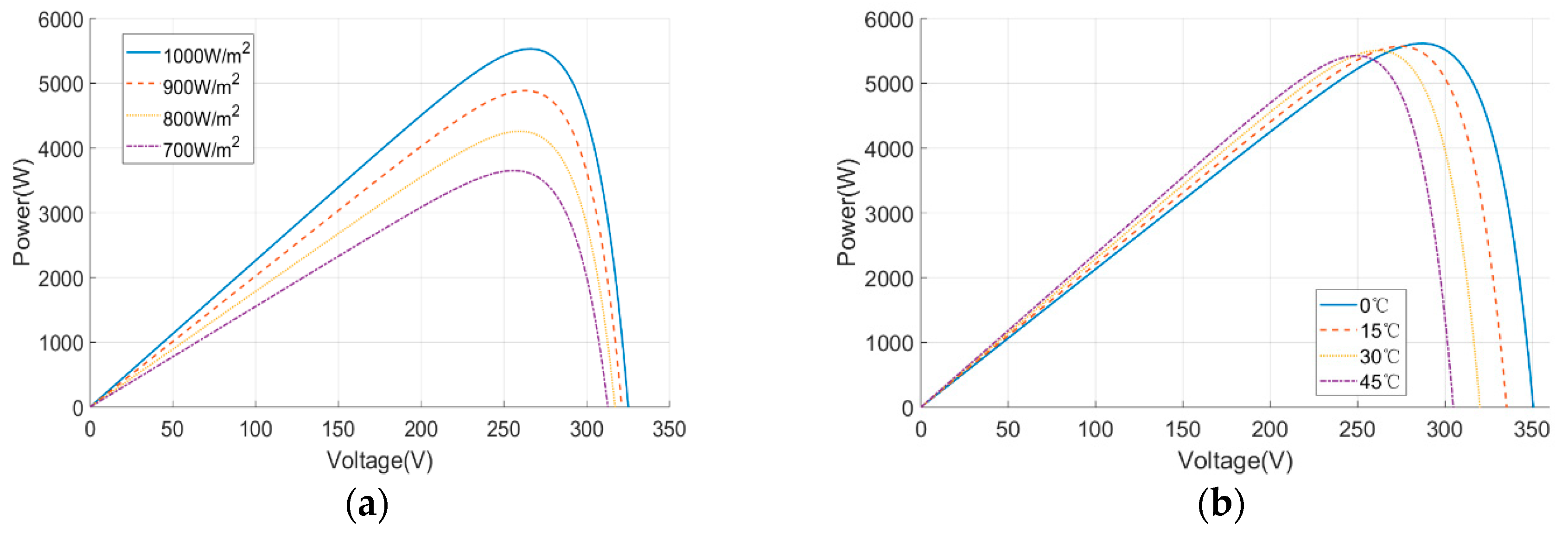
2.1. PV Array Modeling
2.2. Training and Testing SVR Model
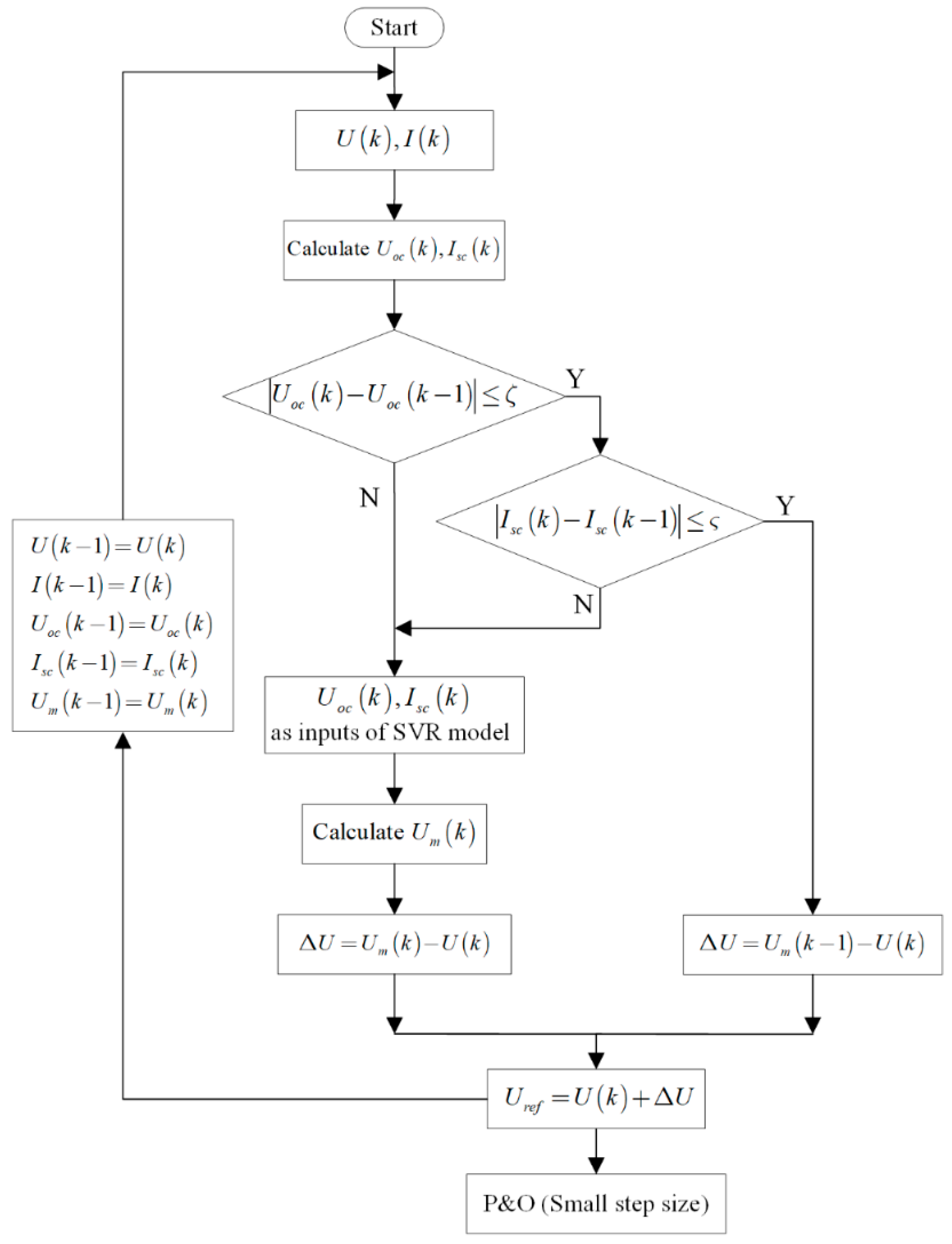
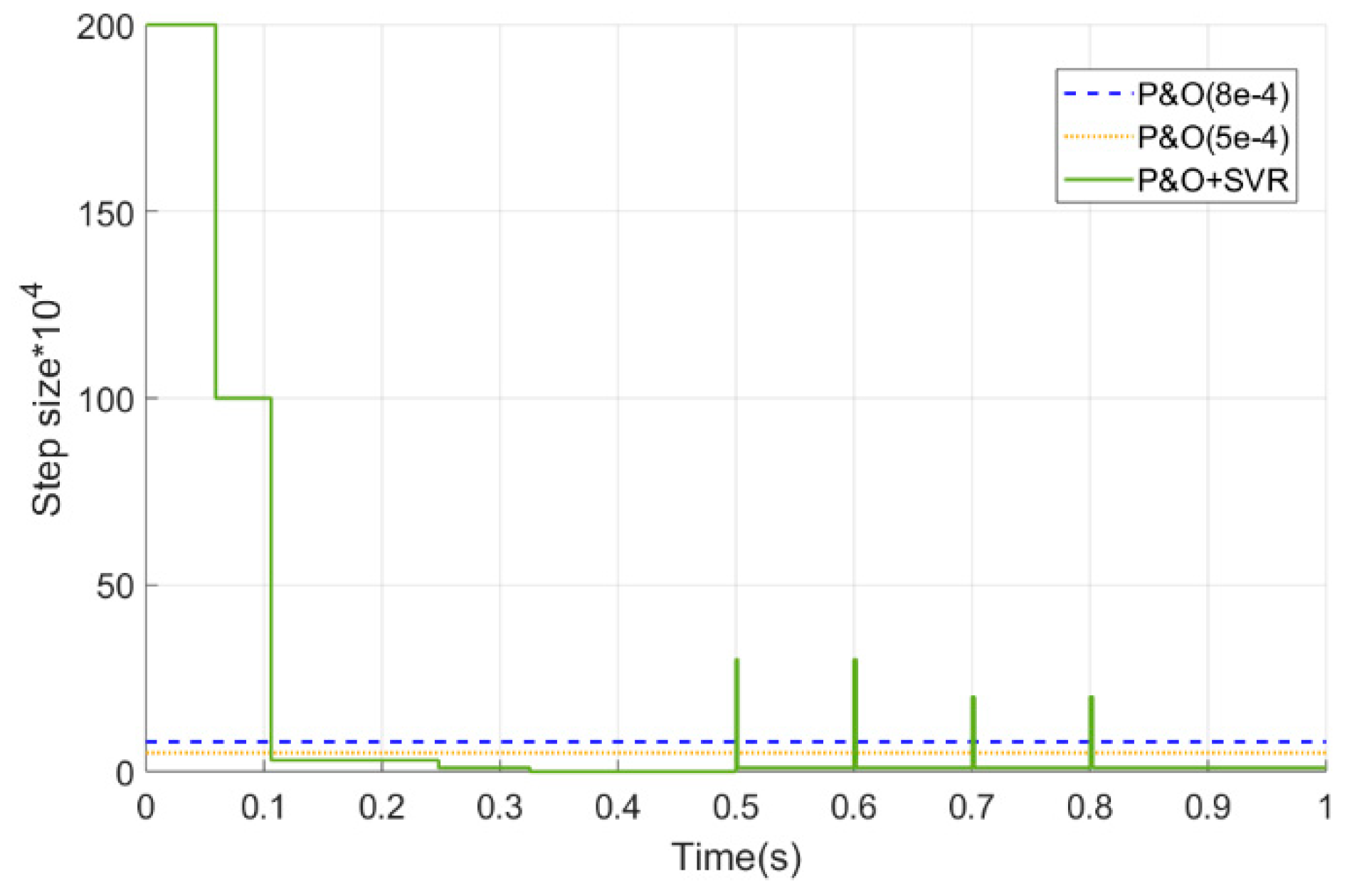
2.3. Control Strategy of Improved Algorithm
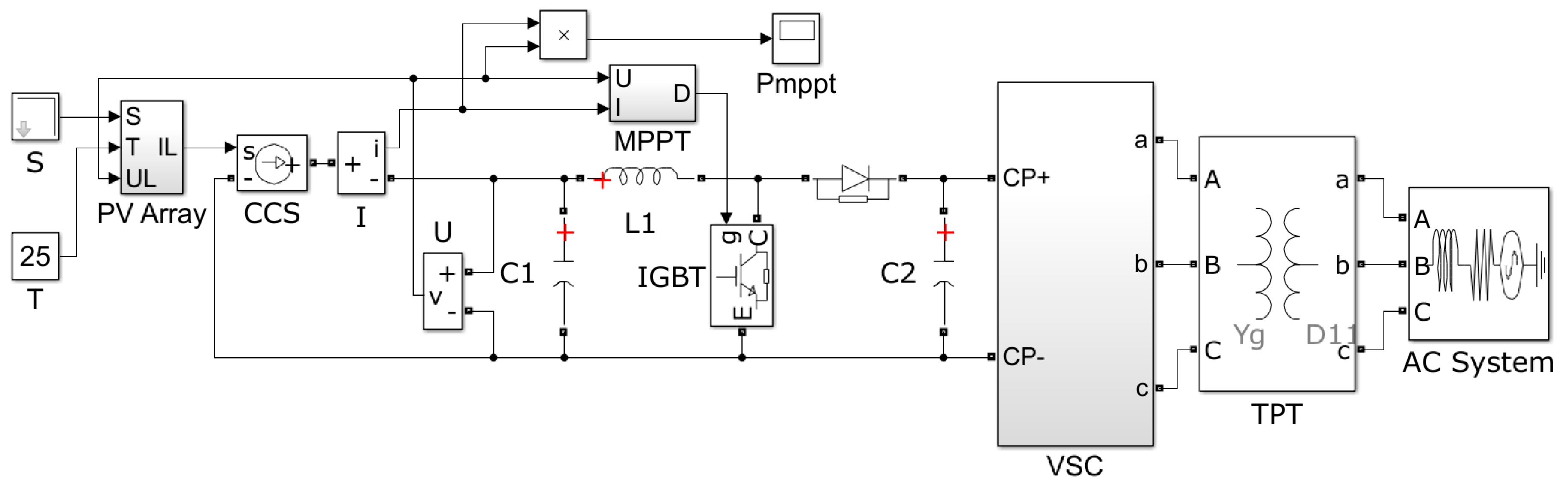
2.4. Model Simulation
3. Results and Discussion
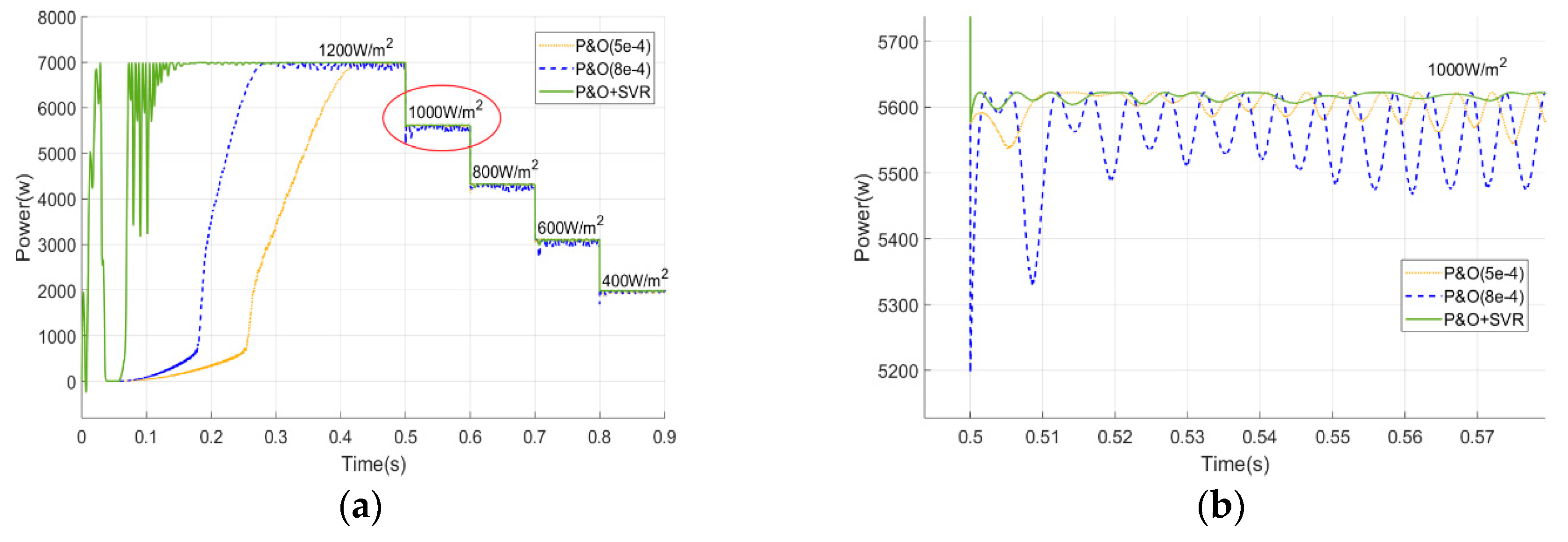
3.1. Irradiance Reduction
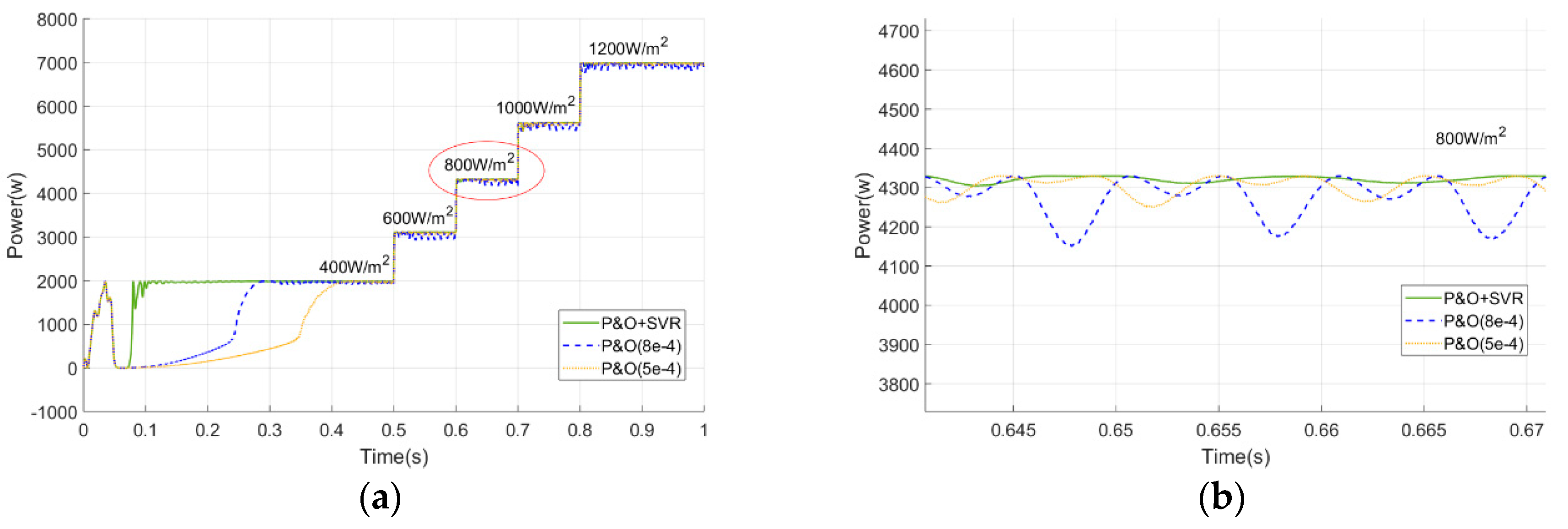
3.2. Irradiance Increase
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fraunhofer Institute for Solar Energy Systems (ISE). Annual Report 2016/2017; Fraunhofer Institute for Solar Energy Systems ISE: Freiburg, Germany, 2017; pp. 1–88. [Google Scholar]
- BP Statistical Review of World Energy 2018; BP: London, UK, 2018; pp. 1–54.
- REN21. Renewable Energy Policy Network for the 21st Century Renewables 2017, Global Status Report—REN21; REN21: Paris, France, 2018; 325p. [Google Scholar]
- Elgendy, M.A.; Zahawi, B.; Atkinson, D.J. Assessment of perturb and observe MPPT algorithm implementation techniques for PV pumping applications. IEEE Trans. Sustain. Energy 2012, 3, 21–33. [Google Scholar] [CrossRef]
- Safari, A.; Mekhilef, S. Incremental conductance MPPT method for PV systems. In Proceedings of the 24th Canadian Conference on IEEE, Niagara Falls, ON, Canada, 8–11 May 2011; pp. 345–347. [Google Scholar] [CrossRef]
- Farayola, A.M.; Hasan, A.N.; Ali, A. Implementation of modified incremental conductance and fuzzy logic MPPT techniques using MCUK converter under various environmental conditions. Appl. Sol. Energy 2017, 53, 173–184. [Google Scholar] [CrossRef]
- Hilloowala, R.M.; Sharaf, A.M. A rule-based fuzzy logic controller for a PWM inverter in photo-voltaic energy conversion scheme. In Proceedings of the Conference Record of the 1992 IEEE, Houston, TX, USA, 4–9 October 1992; pp. 762–769. [Google Scholar] [CrossRef]
- Kottas, T.L.; Boutalis, Y.S.; Karlis, A.D. New maximum power point tracker for PV arrays using fuzzy controller in close cooperation with fuzzy cognitive networks. IEEE Trans. Energy Convers. 2006, 21, 793–803. [Google Scholar] [CrossRef]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A Grey Wolf-Assisted Perturb & Observe MPPT Algorithm for a PV System. IEEE Trans. Energy Convers. 2017, 32, 340–347. [Google Scholar] [CrossRef]
- Mao, M.; Duan, Q.; Duan, P.; Hu, B. Comprehensive improvement of artificial fish swarm algorithm for global MPPT in PV system under partial shading conditions. Trans. Inst. Meas. Control. 2018, 40, 2178–2199. [Google Scholar] [CrossRef]
- Karami, N.; Moubayed, N.; Outbib, R. General review and classification of different MPPT Techniques. Renew. Sustain. Energy Rev. 2017, 68, 1–18. [Google Scholar] [CrossRef]
- Telbany, M.E.; Youssef, A.; Zekry, A.A. Intelligent techniques for MPPT control in photovoltaic systems: A comprehensive review. In Proceedings of the 4th International Conference IEEE, Kota Kinabalu, Malaysia, 3–5 December 2014; pp. 17–22. [Google Scholar] [CrossRef]
- Kamarzaman, N.A.; Tan, C.W. A comprehensive review of maximum power point tracking algorithms for photovoltaic systems. Renew. Sustain. Energy Rev. 2014, 37, 585–598. [Google Scholar] [CrossRef]
- Esram, T.; Chapman, P.L. Comparison of photovoltaic array maximum power point tracking techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef]
- Hiyama, T.; Kouzuma, S.; Imakubo, T. Identification of optimal operating point of PV modules using neural network for real time maximum power tracking control. IEEE Trans. Energy Convers. 1995, 10, 360–367. [Google Scholar] [CrossRef]
- Fronius Symo Maximum Flexibility for the Applications of Tomorrow. Available online: https://www.fronius.com/en/photovoltaics/products/all-products/inverters/fronius-symo/fronius-symo-3-0-3-m (accessed on 25 February 2019).
- Ahmed, R.; Namaane, A.; M’Sirdi, N.K. Improvement in perturb and observe method using state flow approach. Energy Proc. 2013, 42, 614–623. [Google Scholar] [CrossRef]
- Abdelsalam, A.K.; Massoud, A.M.; Ahmed, S.; Enjeti, P.N. High-performance adaptive perturb and observe MPPT technique for photovoltaic-based microgrids. IEEE Trans. Power Electron. 2011, 26, 1010–1021. [Google Scholar] [CrossRef]
- Al-Amoudi, A.; Zhang, L. Optimal control of a grid-connected PV system for maximum power point tracking and unity power factor. In Proceedings of the Seventh International Conference on Power Electronics and Variable Speed Drives, London, UK, 21–23 Septembre 1998; pp. 80–85. [Google Scholar] [CrossRef]
- Vapnik, V. The Nature of Statistical Learning Theory, 2nd ed.; Springer Science & Business Media: New York, NY, USA, 1999; pp. 138–141. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Villalva, M.G.; Gazoli, J.R.; Ruppert Filho, E. Comprehensive approach to modeling and simulation of photovoltaic arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Hsiao, P.W.; Chang, C.H.; Tsai, H.L. Accuracy improvement of practical PV model. In Proceedings of the SICE Annual Conference 2010, Taipei, Taiwan, 18–21 August 2010; IEEE: Taipei, Taiwan, 2010; pp. 2725–2730. [Google Scholar]
- Di Fazio, A.R.; Russo, M. Photovoltaic generator modelling to improve numerical robustness of EMT simulation. Electr. Power Syst. Res. 2012, 83, 136–143. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An Improved Particle Swarm Optimization (PSO)-Based MPPT for PV With Reduced Steady-State Oscillation. IEEE Trans. Power Electron. 2012, 27, 3627–3638. [Google Scholar] [CrossRef]
- Kadri, R.; Gaubert, J.P.; Champenois, G. An Improved Maximum Power Point Tracking for Photovoltaic Grid-Connected Inverter Based on Voltage-Oriented Control. IEEE Trans. Power Electron. 2011, 58, 66–75. [Google Scholar] [CrossRef]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intel. Syst. Technol. 2011, 2, 27. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Meaning | Value |
|---|---|---|
| s | Type of problem | 3 (e-SVR) |
| t | Type of kernel | 2 (RBF kernel) |
| c | Penalty term | exp(i) (i = 4, 5, 6, 7, 8, 9) |
| g | gamma | exp(i) (i = −2, −1, 0, 1, 2) |
| v | n-fold cross-validation | 5 |
| p | loss function | 0.01 |
| Irradiance (W/m2) | Average Power at Steady State (W) | Method | Convergence Time (s) | Tracking Efficiency (%) |
|---|---|---|---|---|
| 1200 | 6991 | P&O (5e–4) | 0.4349 | 99.16 |
| P&O (8e–4) | 0.2851 | 97.67 | ||
| P&O + SVR | 0.1887 | 99.87 | ||
| 1000 | 5623 | P&O (5e–4) | 0.0113 | 99.06 |
| P&O (8e–4) | 0.0056 | 97.42 | ||
| P&O + SVR | 0.0013 | 99.80 | ||
| 800 | 4329 | P&O (5e−4) | 0.0169 | 98.11 |
| P&O (8e−4) | 0.0103 | 96.86 | ||
| P&O + SVR | 0.0009 | 99.45 | ||
| 600 | 3116 | P&O (5e−4) | 0.0085 | 97.27 |
| P&O (8e−4) | 0.0037 | 94.99 | ||
| P&O + SVR | 0.0005 | 99.29 | ||
| 400 | 1986 | P&O (5e−4) | 0.0092 | 97.89 |
| P&O (8e−4) | 0.0065 | 97.38 | ||
| P&O + SVR | 0.0013 | 99.50 |
| Irradiance (W/m2) | Average Power at Steady State (W) | Method | Convergence Time (s) | Tracking Efficiency (%) |
|---|---|---|---|---|
| 400 | 1986 | P&O (5e−4) | 0.4277 | 97.48 |
| P&O (8e−4) | 0.2907 | 96.27 | ||
| P&O + SVR | 0.0803 | 99.65 | ||
| 600 | 3116 | P&O (5e−4) | 0.0132 | 97.34 |
| P&O (8e−4) | 0.0061 | 94.32 | ||
| P&O + SVR | 0.0025 | 99.94 | ||
| 800 | 4329 | P&O (5e−4) | 0.0088 | 97.97 |
| P&O (8e−4) | 0.0053 | 96.14 | ||
| P&O + SVR | 0.0009 | 99.79 | ||
| 1000 | 5623 | P&O (5e−4) | 0.0111 | 98.65 |
| P&O (8e−4) | 0.0086 | 97.12 | ||
| P&O + SVR | 0.0011 | 99.93 | ||
| 1200 | 6991 | P&O (5e−4) | 0.0102 | 99.54 |
| P&O (8e−4) | 0.0052 | 98.01 | ||
| P&O + SVR | 0.0011 | 99.97 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, B.; Ke, X.; Tang, D.; Yin, S. Improved Perturb and Observation Method Based on Support Vector Regression. Energies 2019, 12, 1151. https://doi.org/10.3390/en12061151
Tan B, Ke X, Tang D, Yin S. Improved Perturb and Observation Method Based on Support Vector Regression. Energies. 2019; 12(6):1151. https://doi.org/10.3390/en12061151
Chicago/Turabian StyleTan, Bicheng, Xin Ke, Dachuan Tang, and Sheng Yin. 2019. "Improved Perturb and Observation Method Based on Support Vector Regression" Energies 12, no. 6: 1151. https://doi.org/10.3390/en12061151
APA StyleTan, B., Ke, X., Tang, D., & Yin, S. (2019). Improved Perturb and Observation Method Based on Support Vector Regression. Energies, 12(6), 1151. https://doi.org/10.3390/en12061151