System Configuration, Fault Detection, Location, Isolation and Restoration: A Review on LVDC Microgrid Protections



Abstract
:1. Introduction
2. System Configuration
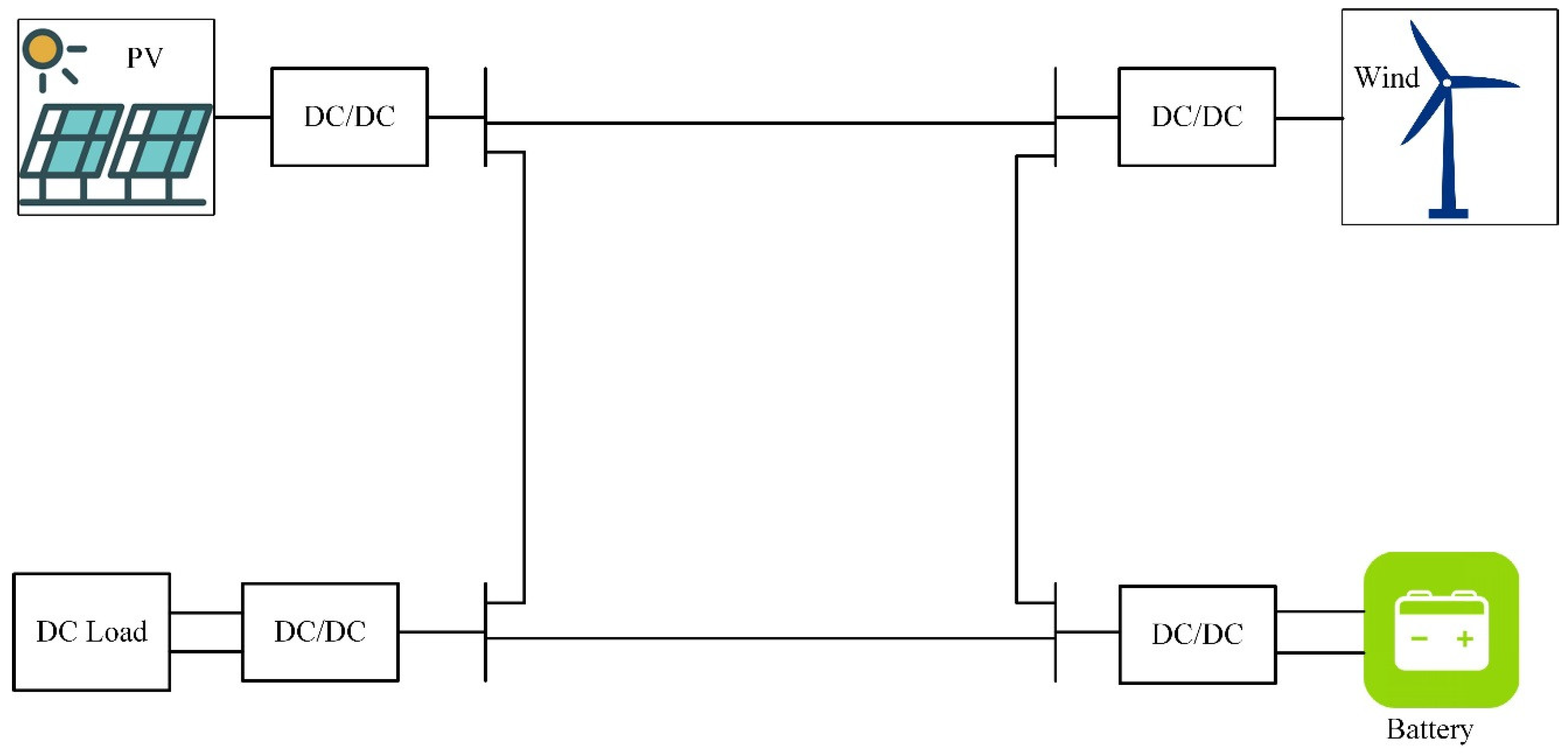
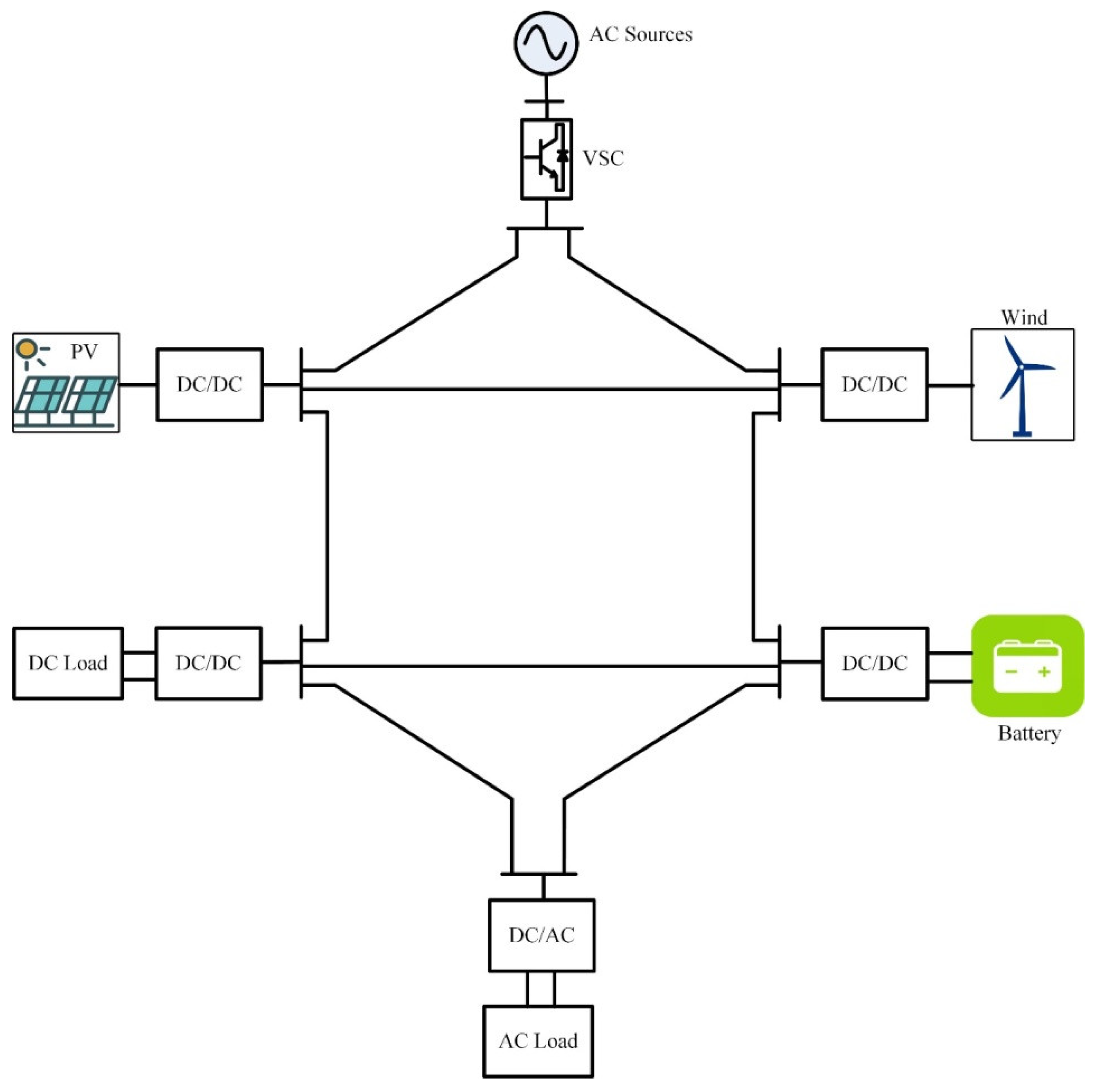
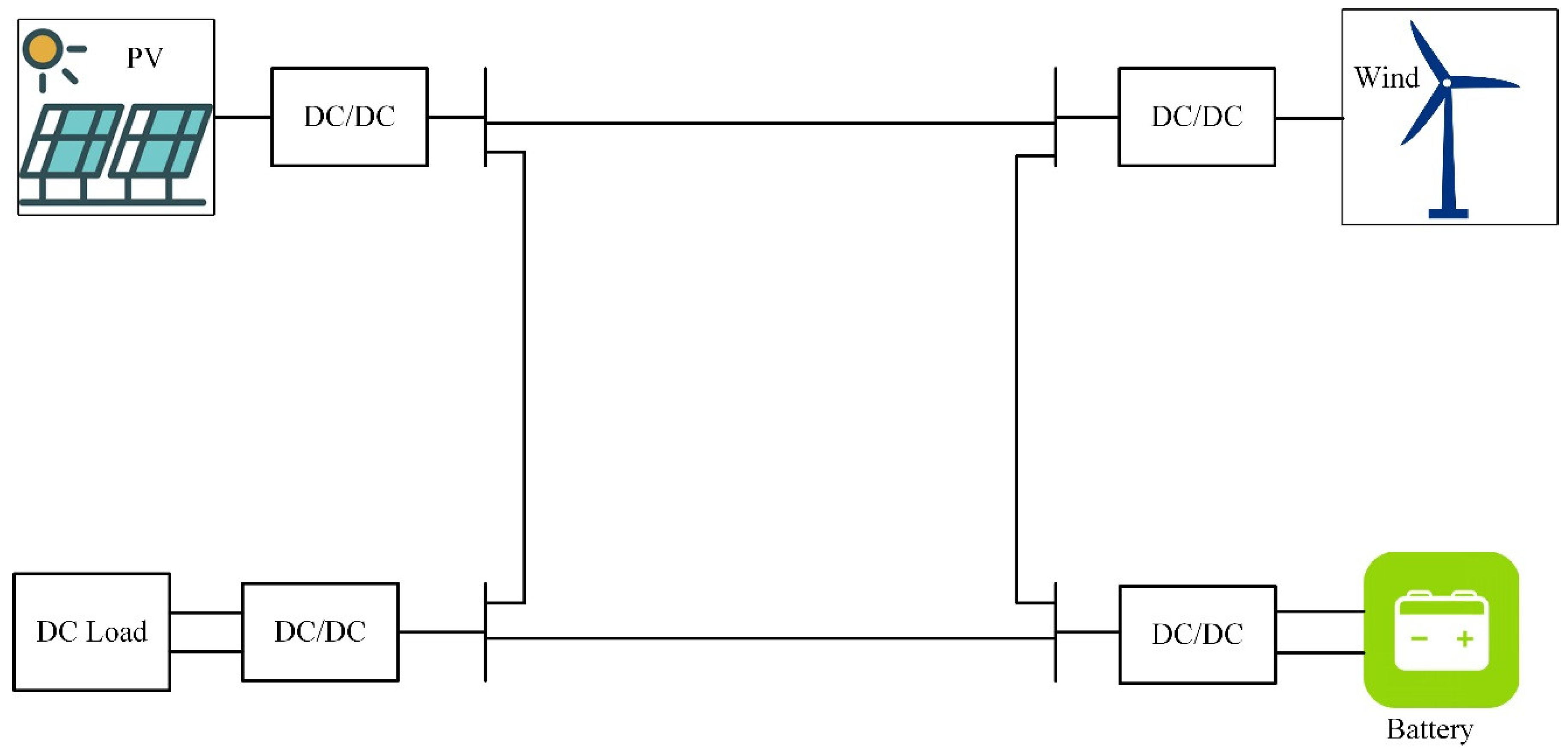
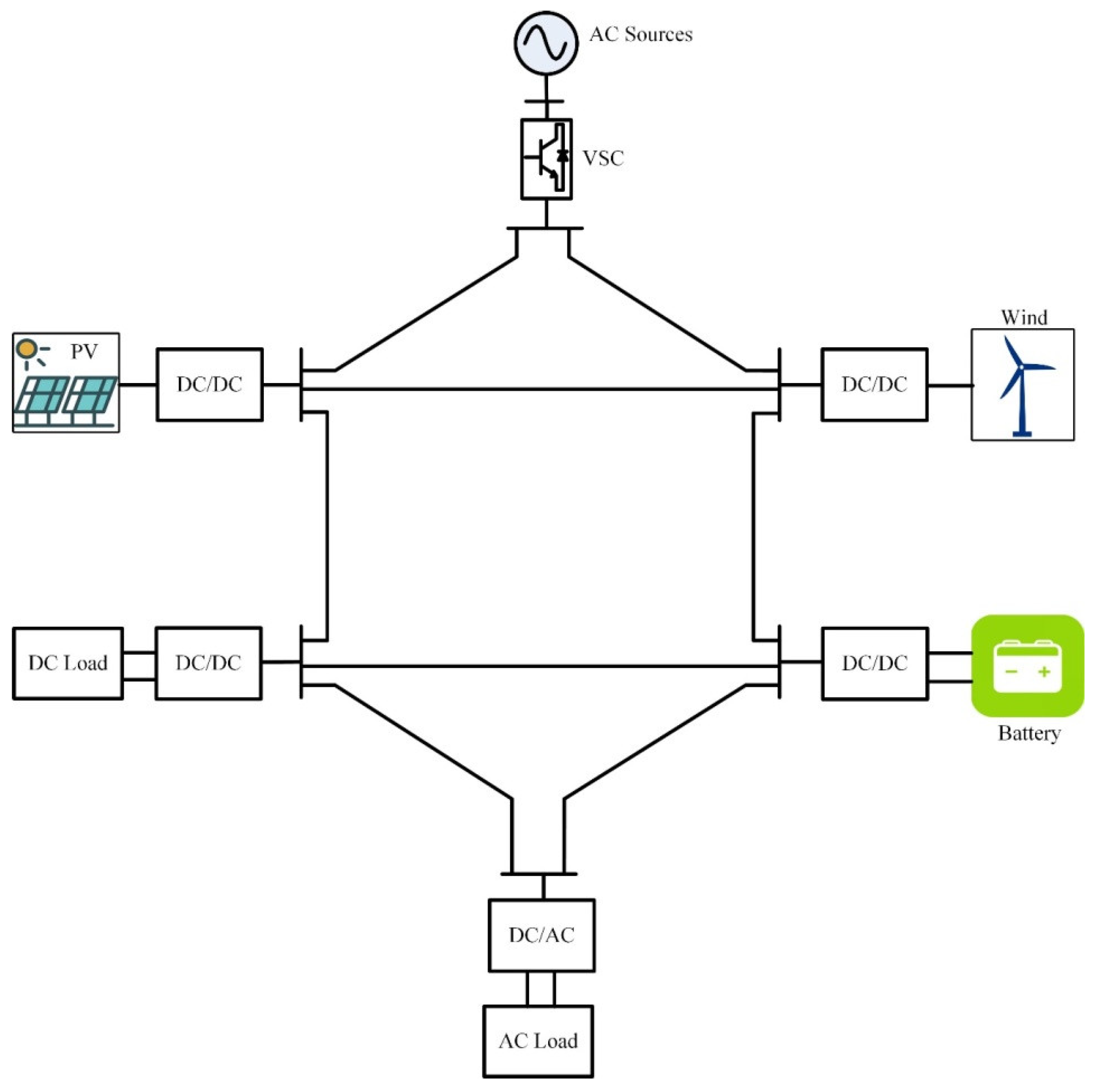
2.1. DC Microgrid Architecture
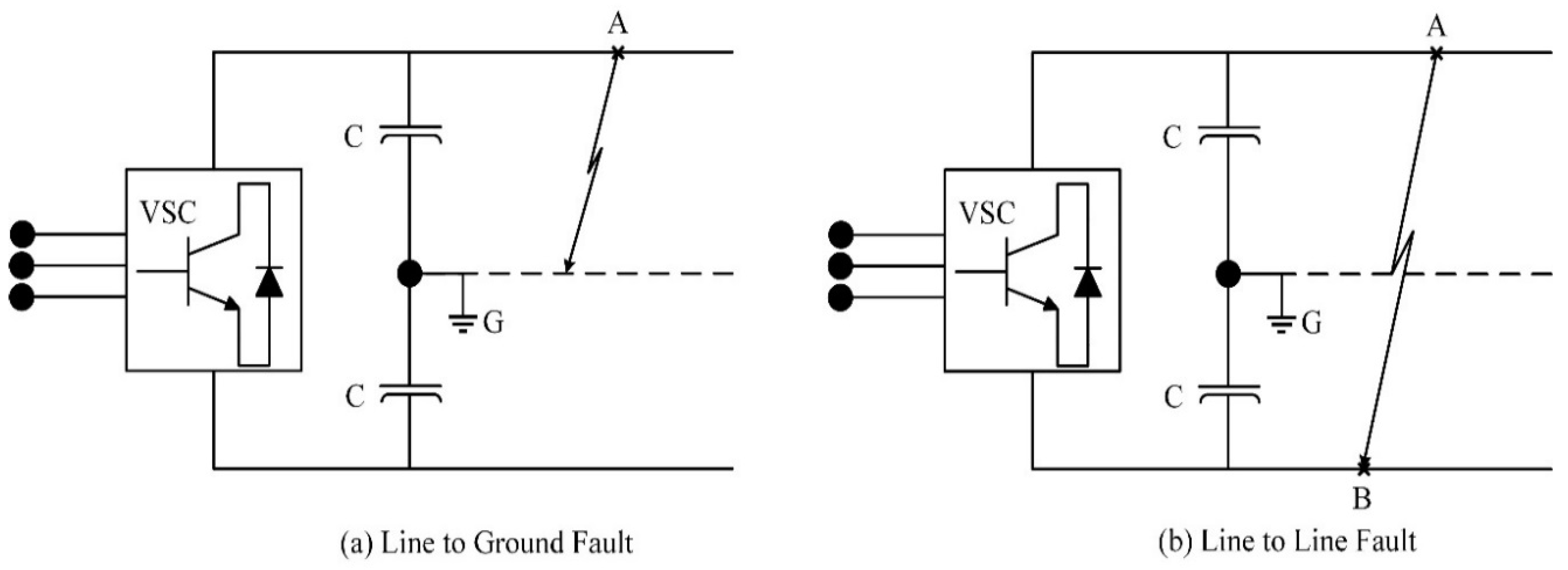
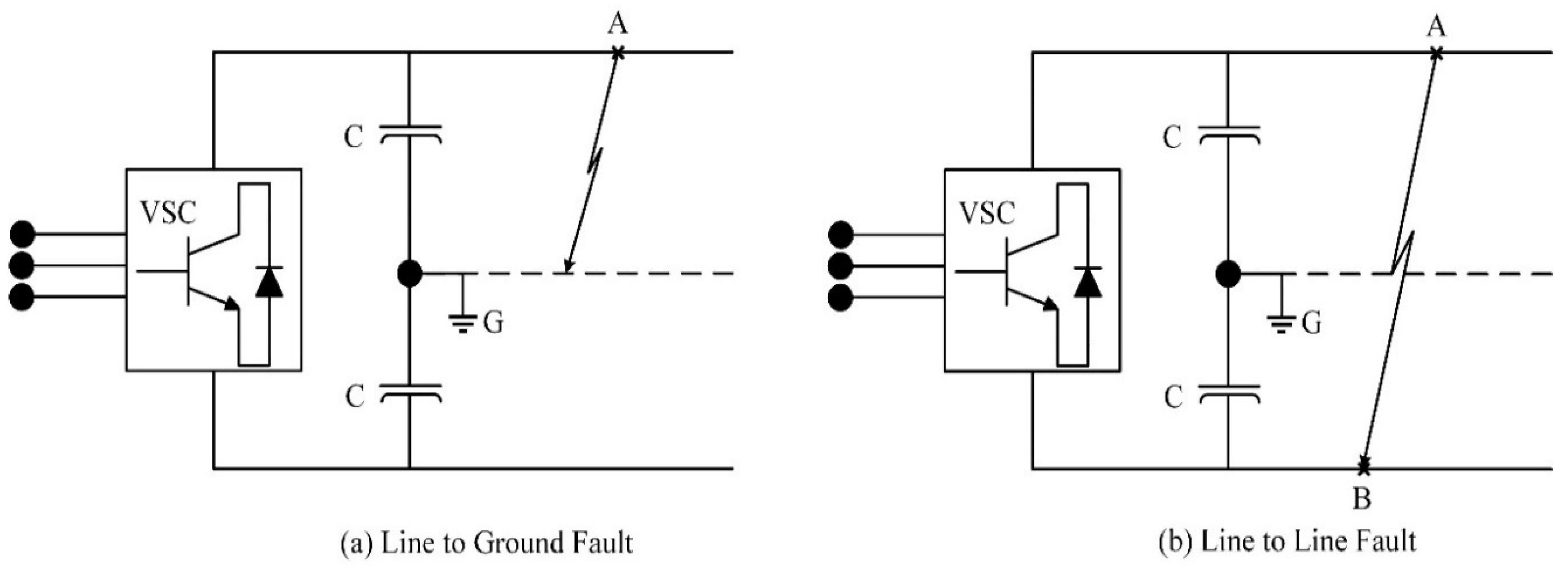
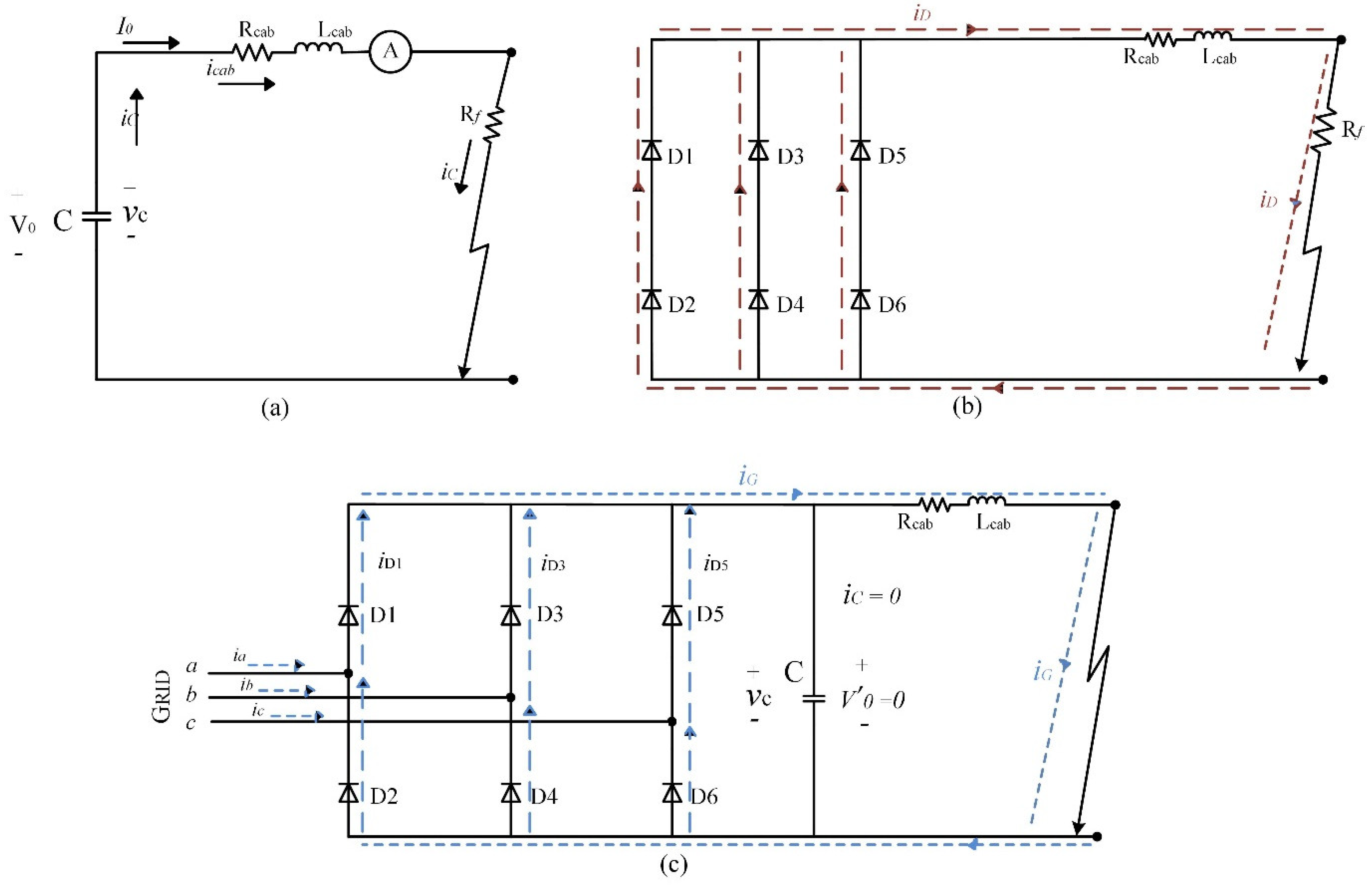
2.2. DC Fault Types and Fault Characteristics
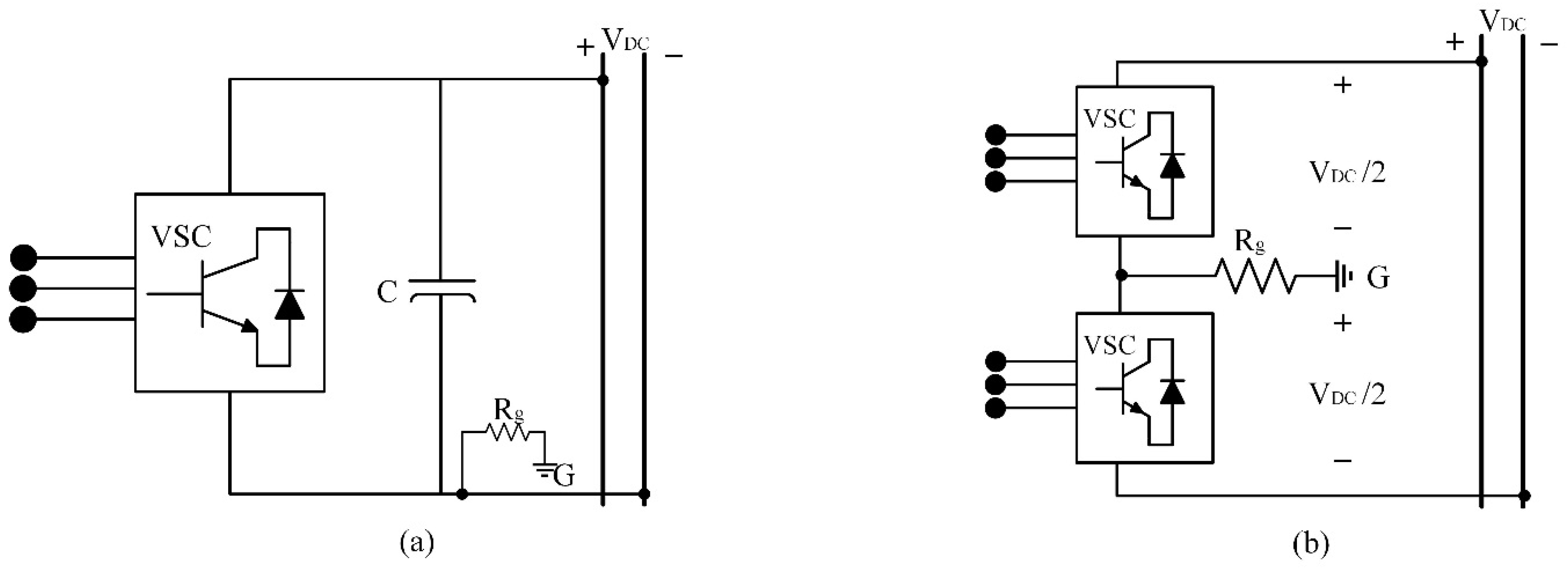
2.3. DC Earthing Configurations
2.3.1. Unearthed DC System
2.3.2. Earthed DC System
2.3.3. Solid earthed DC system
2.4. Circuit Breaker Technologies
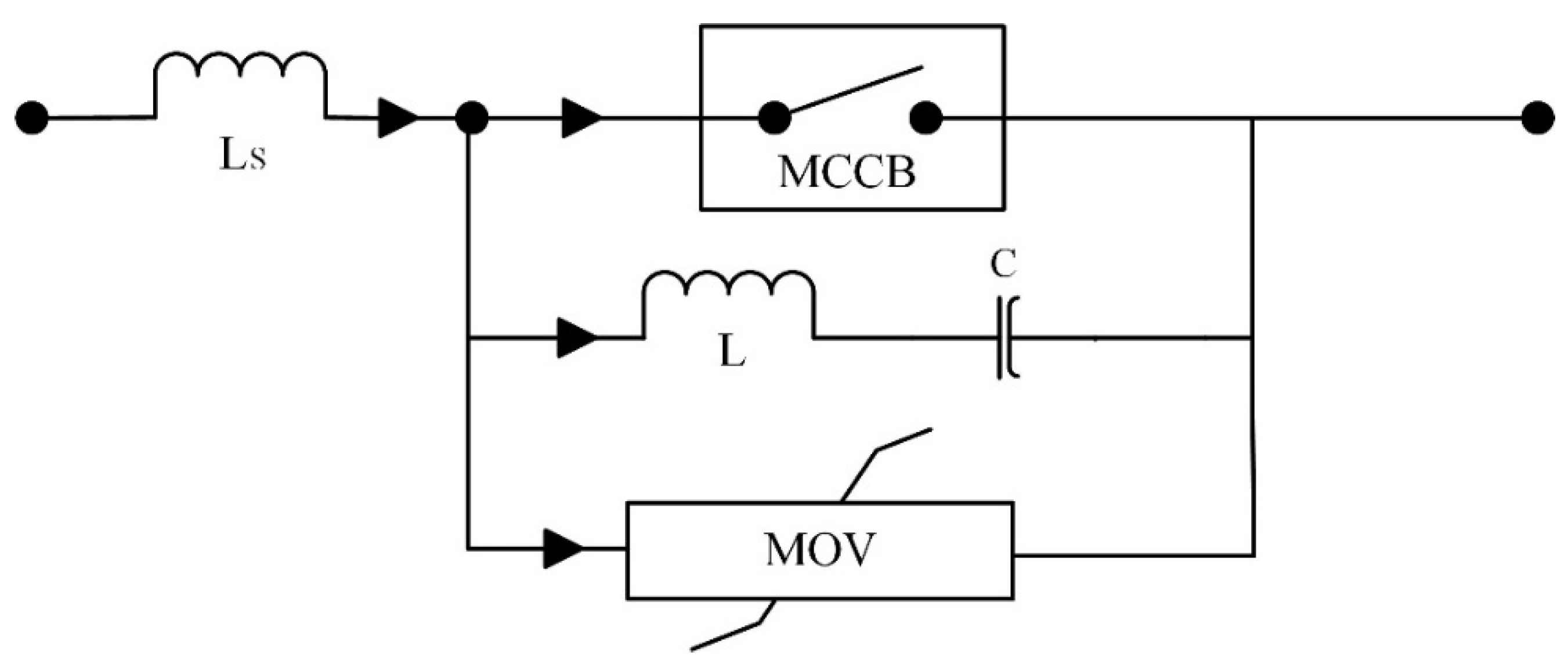
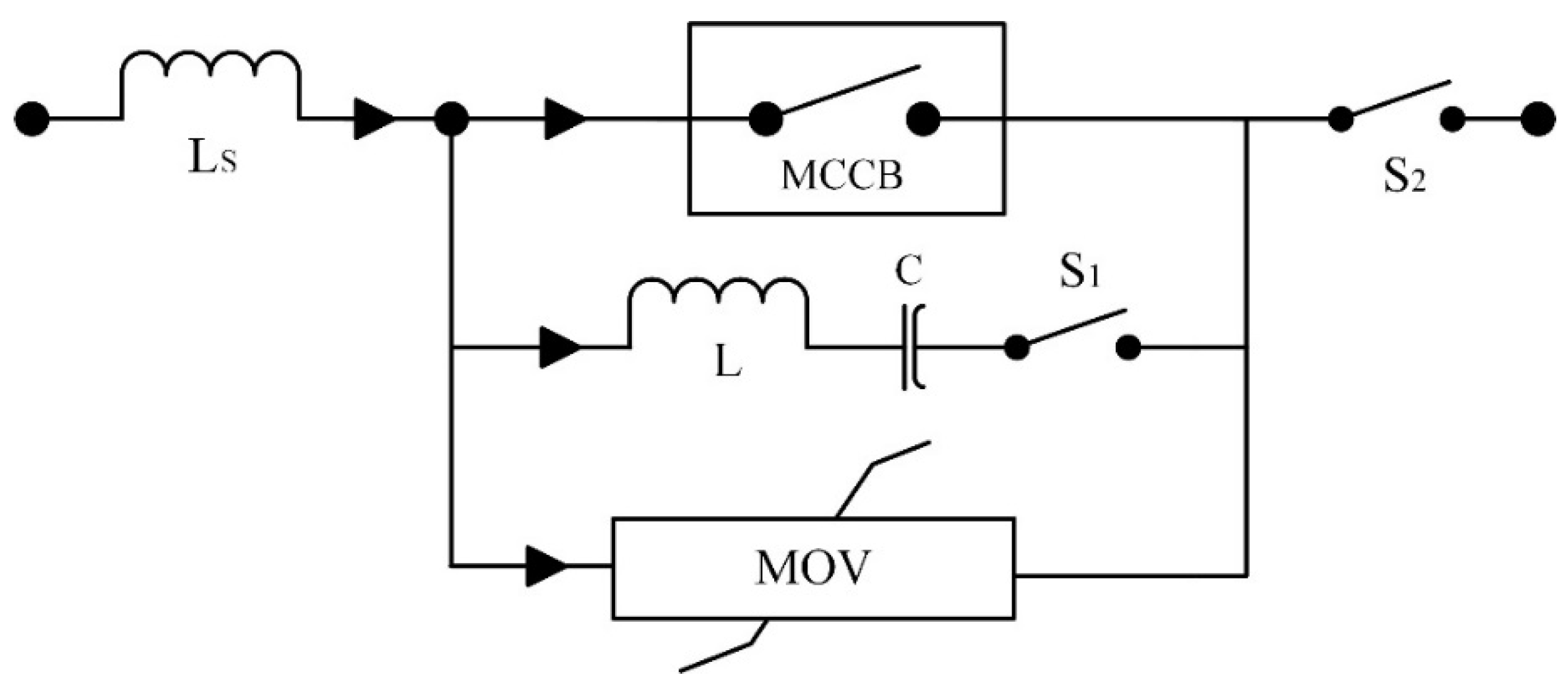
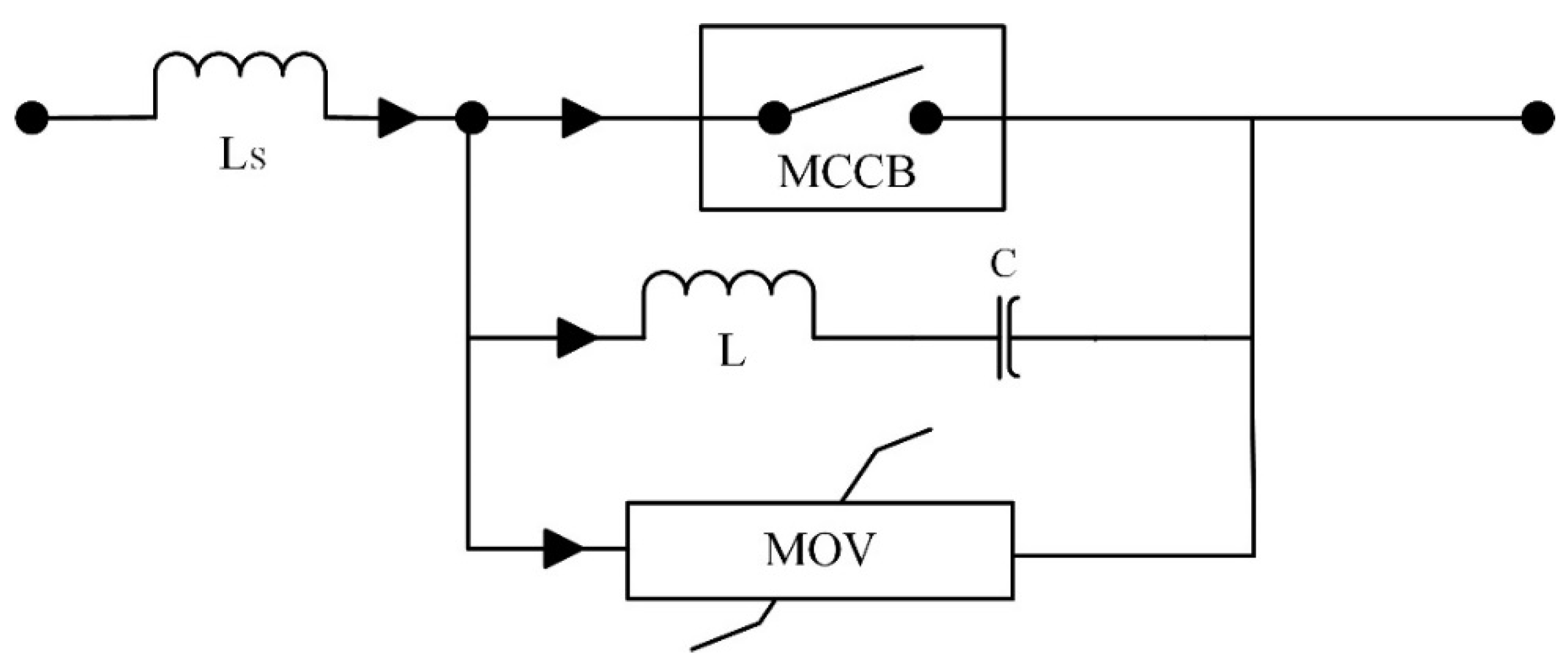
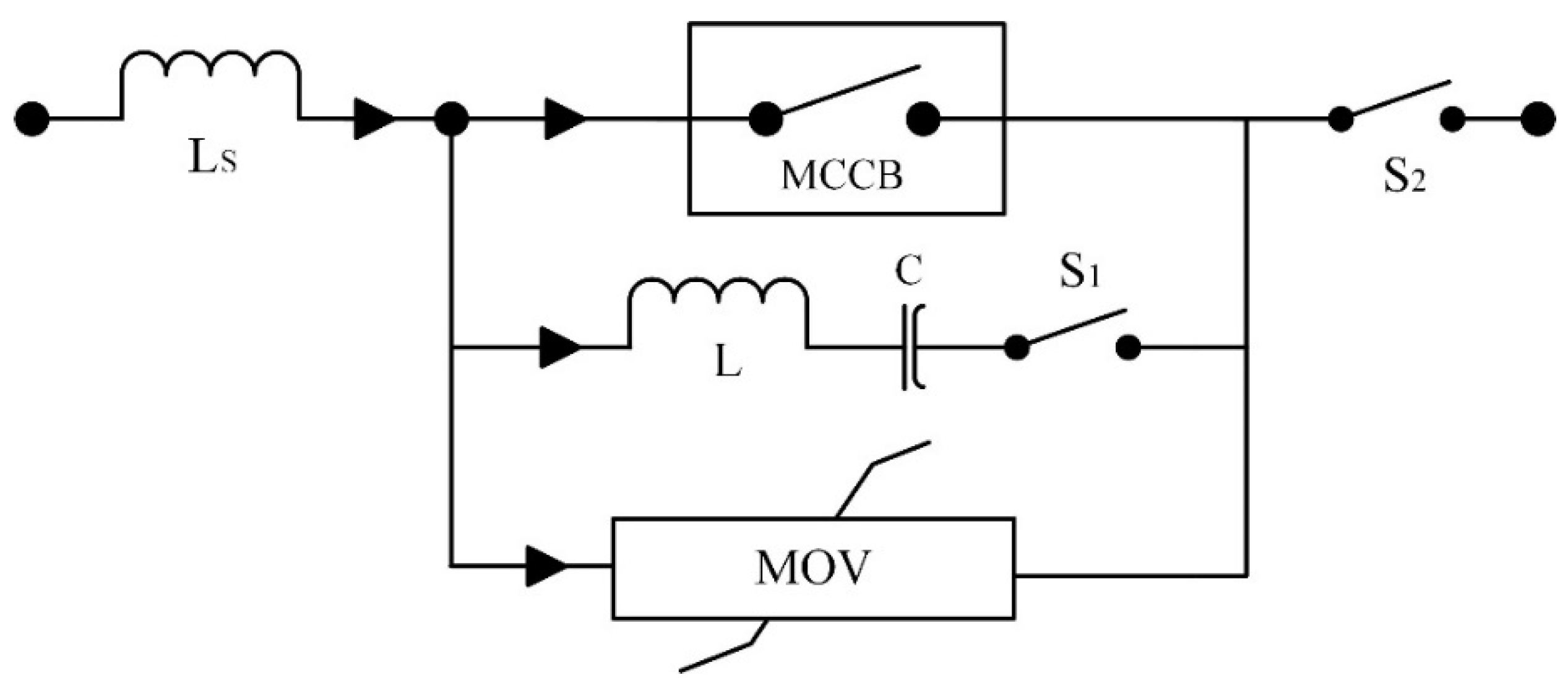
2.4.1. Mechanical Circuit Breakers
Commercially Available LVDC Circuit Breakers
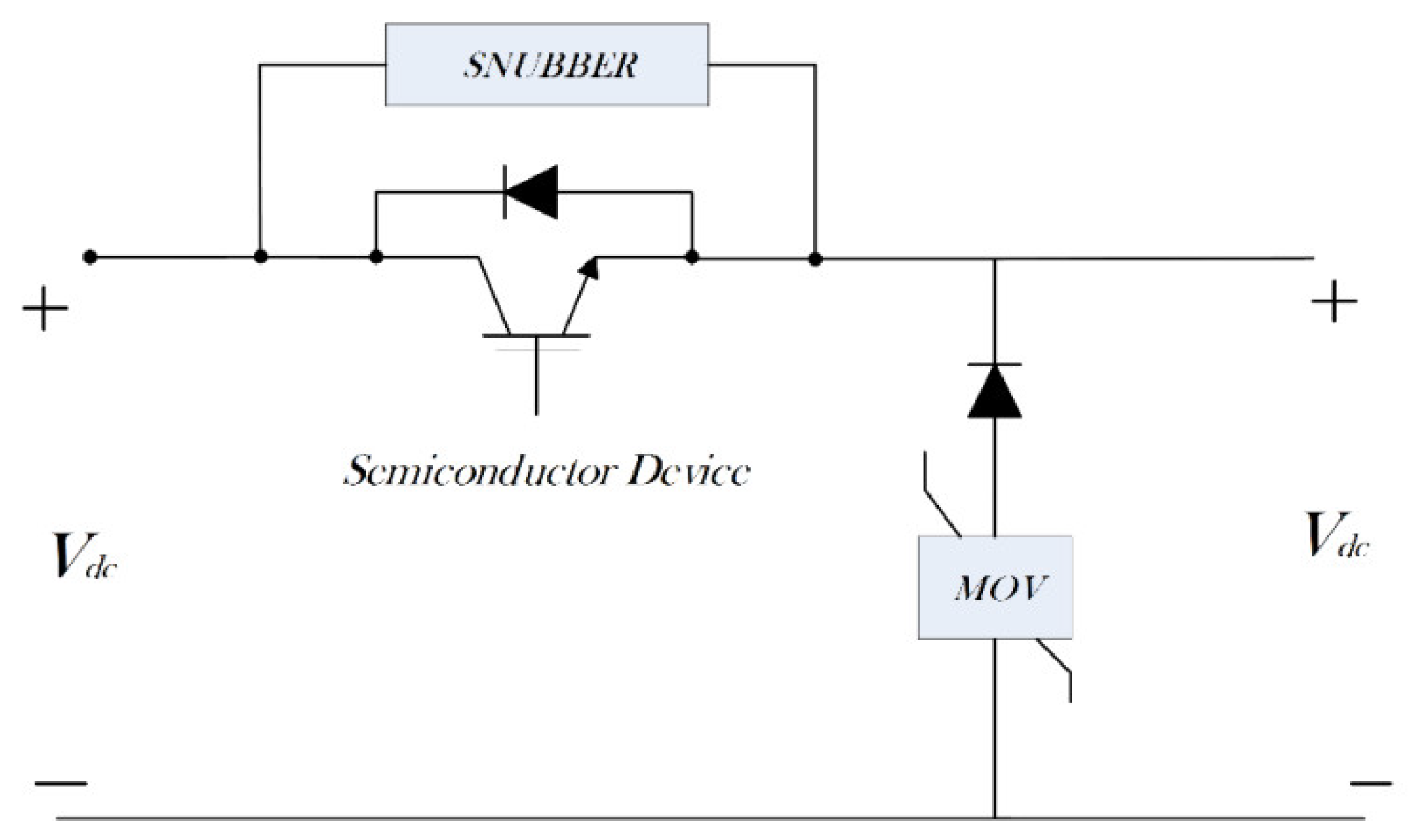
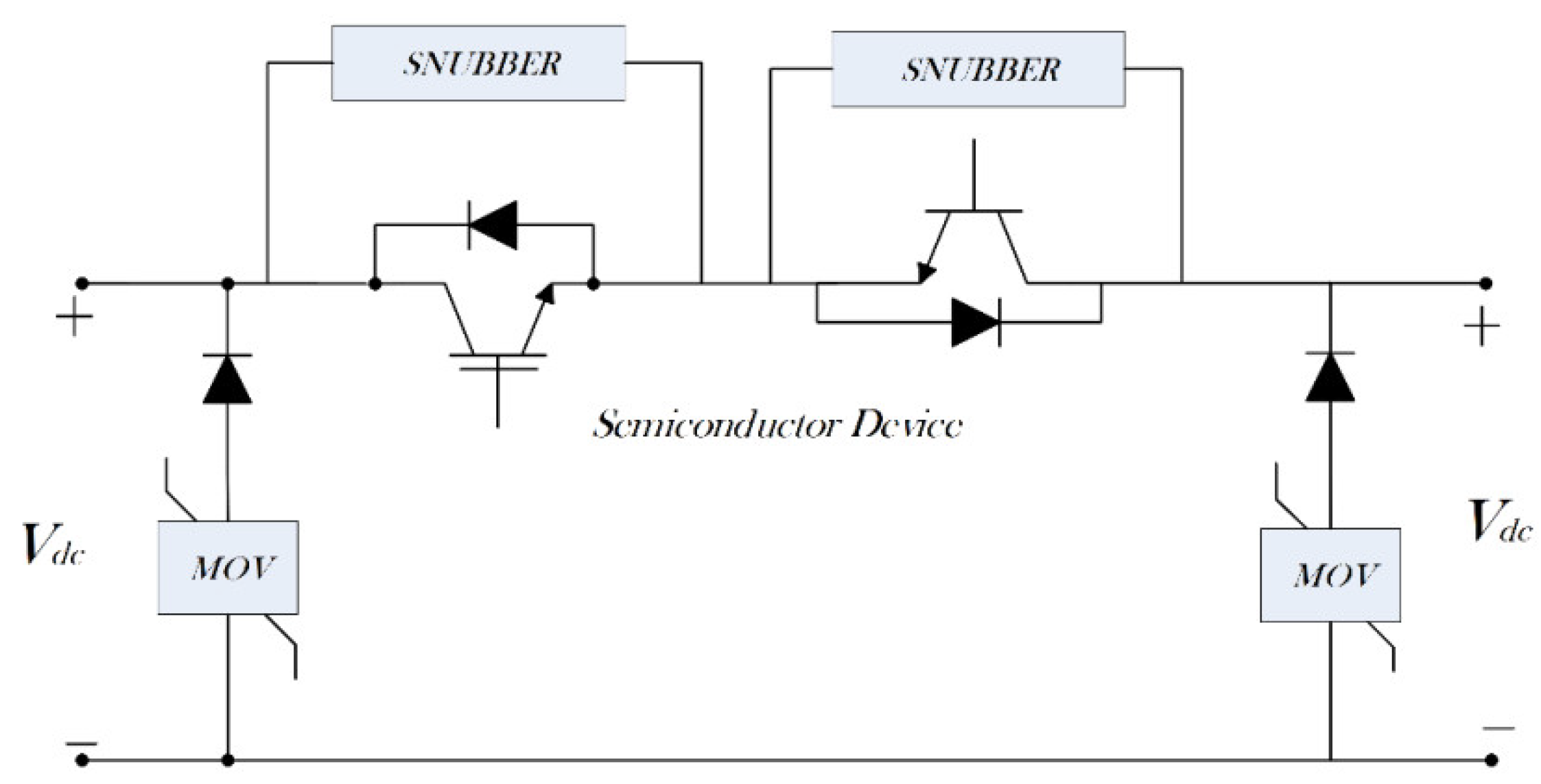
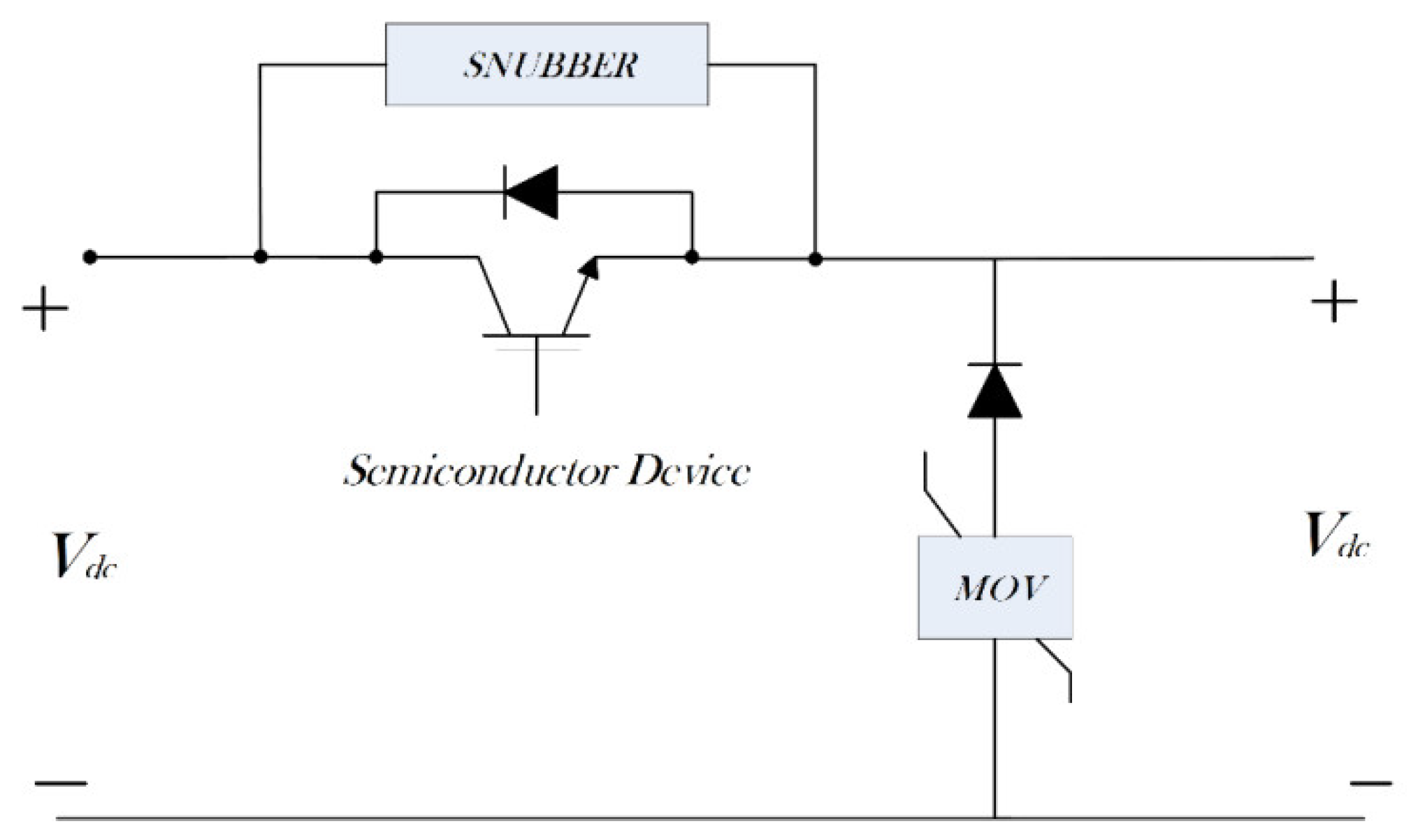
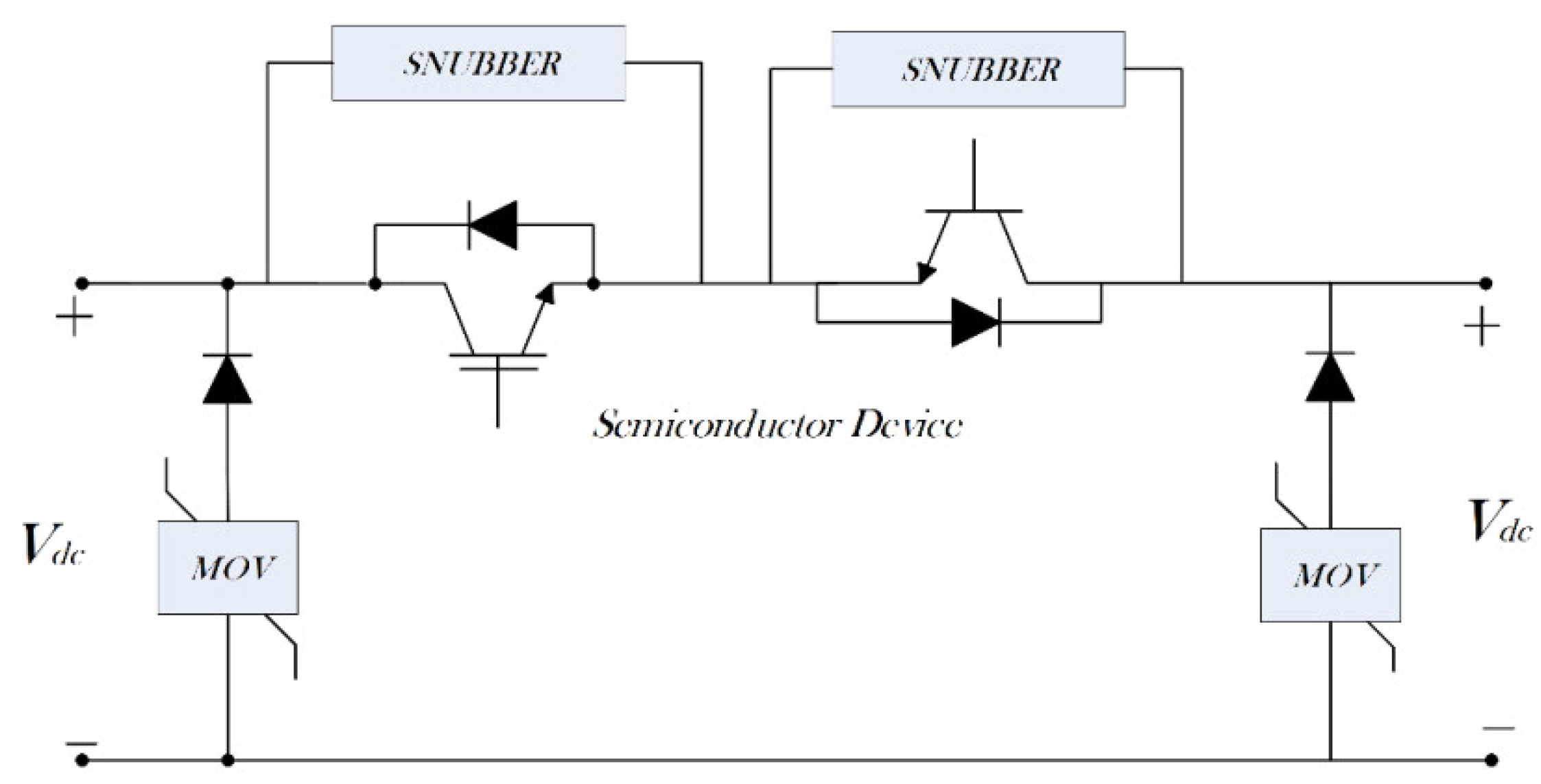
2.4.2. Solid-State Circuit Breakers
2.4.3. Hybrid Solid-State Circuit Breakers
2.4.4. Fault Current Limiters
3. DC Fault Detection, Location and Isolation
3.1. Local Measurement Based Fault Detection and Isolation Schemes
3.1.1. Overcurrent Detection
3.1.2. Derivative Measurement-Based Fault Detection
3.1.3. Source Current Blocking Protection Scheme
3.1.4. Voltage Prediction-Based Protection
3.1.5. Oscillation Frequency-Based Protection
3.1.6. Differential Protection
3.1.7. Artificial Inductive Line Impedance (AILI) based Protection
3.1.8. Summary of DC Fault Detections and Isolations
3.2. Fault Location Schemes
3.2.1. Offline Fault Location Methods
3.2.2. Online Fault Location Methods
3.2.3. Summary of Fault Locating Techniques
3.3. Other Protection Schemes
Artificial Intelligence Protection Scheme:
4. Post-Fault Restoration in DC Microgrids
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- EU Commission. Directive of the European Parliament and of the Council on the Promotion of the Use of Energy from Renewable Sources (Recast); EU Commission: Brussels, Belgium, 2017; Volume COM(2016). [Google Scholar]
- Oudalov, A.; Degner, T.; van Overbeeke, F.; Yarza, J.M. Microgrids; Hatziargyriou, N., Ed.; John Wiley and Sons Ltd.: Chichester, UK, 2013; ISBN 9781118720677. [Google Scholar]
- Ding, G.; Gao, F.; Zhang, S.; Loh, P.C.; Blaabjerg, F. Control of hybrid AC/DC microgrid under islanding operational conditions. J. Mod. Power Syst. Clean Energy 2014, 2, 223–232. [Google Scholar] [CrossRef]
- Bullich-Massagué, E.; Díaz-González, F.; Aragüés-Peñalba, M.; Girbau-Llistuella, F.; Olivella-Rosell, P.; Sumper, A. Microgrid clustering architectures. Appl. Energy 2018, 212, 340–361. [Google Scholar] [CrossRef]
- Hajian, M.; Jovcic, D.; Wu, B. Evaluation of Semiconductor Based Methods for Fault Isolation on High Voltage DC Grids. IEEE Trans. Smart Grid 2013, 4, 1171–1179. [Google Scholar] [CrossRef]
- AlLee, G.; Tschudi, W. Edison Redux: 380 Vdc Brings Reliability and Efficiency to Sustainable Data Centers. IEEE Power Energy Mag. 2012, 10, 50–59. [Google Scholar] [CrossRef]
- Kwasinski, A. Quantitative Evaluation of DC Microgrids Availability: Effects of System Architecture and Converter Topology Design Choices. IEEE Trans. Power Electron. 2011, 26, 835–851. [Google Scholar] [CrossRef]
- Dragicevic, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part II: A Review of Power Architectures, Applications, and Standardization Issues. IEEE Trans. Power Electron. 2016, 31, 3528–3549. [Google Scholar] [CrossRef]
- IEEE. IEEE 946-1992 Recommended Practice for the Design of DC Auxiliary Power Systems for Generating Stations; IEEE: Piscataway, NJ, USA, 1992; Volume 1992. [Google Scholar]
- European Telecommunication Standards Institute. Part 3: ETSI EN 300 132-3-1; European Telecommunication Standards Institute: Sophia Antipolis, France, 2011; Volume 1, pp. 1–31. [Google Scholar]
- Wu, P.; Huang, W.; Tai, N.; Liang, S. A novel design of architecture and control for multiple microgrids with hybrid AC/DC connection. Appl. Energy 2018, 210, 1002–1016. [Google Scholar] [CrossRef]
- Saidi, A.; Chellali, B. Simulation and Control of Solar Wind Hybrid Renewable Power System. In Proceedings of the 2017 6th International Conference on Systems and Control (ICSC), Batna, Algeria, 7–9 May 2017; pp. 51–56. [Google Scholar]
- Cano, A.; Jurado, F.; Sanchez, H.; Castaneda, M.; Fernandez, L.M. Sizing and Energy Management of a Stand-Alone PV/Hydrogen/Battery-Based Hybrid System. In Proceedings of the International Symposium on Power Electronics Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 20–22 June 2012; pp. 969–973. [Google Scholar]
- Zare, F. Modular Multi-Parallel Rectifiers (MMR) with two DC link current sensors. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–7. [Google Scholar]
- Lindman, P.; Thorsell, L. Applying distributed power modules in telecom systems. IEEE Trans. Power Electron. 1996, 11, 365–373. [Google Scholar] [CrossRef]
- Rodriguez-Diaz, E.; Savaghebi, M.; Vasquez, J.C.; Guerrero, J.M. An Overview of Low Voltage DC Distribution Systems for Residential Applications. In Proceedings of the 2015 IEEE 5th International Conference on Consumer Electronics—Berlin (ICCE-Berlin), Berlin, Germany, 6–9 September 2015; pp. 318–322. [Google Scholar]
- Kakigano, H.; Miura, Y.; Ise, T. Low-Voltage Bipolar-Type DC Microgrid for Super High Quality Distribution. IEEE Trans. Power Electron. 2010, 25, 3066–3075. [Google Scholar] [CrossRef]
- Balog, R.S.; Krein, P.T. Bus Selection in Multibus DC Microgrids. IEEE Trans. Power Electron. 2011, 26, 860–867. [Google Scholar] [CrossRef]
- Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M.; Skrlec, D. Advanced LVDC Electrical Power Architectures and Microgrids: A step toward a new generation of power distribution networks. IEEE Electrif. Mag. 2014, 2, 54–65. [Google Scholar] [CrossRef]
- Boroyevich, D.; Cvetković, I.; Dong, D.; Burgos, R.; Wang, F.; Lee, F. Future Electronic Power Distribution Systems—A Contemplative View. In Proceedings of the 2010 12th International Conference on Optimization of Electrical and Electronic Equipment, Brasov, Romania, 20–22 May 2010; pp. 1369–1380. [Google Scholar]
- Shafiee, Q.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Modeling, stability analysis and active stabilization of multiple DC-microgrid clusters. In Proceedings of the 2014 IEEE International Energy Conference (ENERGYCON), Cavtat, Croatia, 13–16 May 2014; pp. 1284–1290. [Google Scholar]
- Kumar, D.; Zare, F.; Ghosh, A. DC Microgrid Technology: System Architectures, AC Grid Interfaces, Grounding Schemes, Power Quality, Communication Networks, Applications, and Standardizations Aspects. IEEE Access 2017, 5, 12230–12256. [Google Scholar] [CrossRef]
- Burt, G.M.; Galloway, S.J.; Fletcher, S.D. a.; Norman, P.J. Determination of protection system requirements for DC unmanned aerial vehicle electrical power networks for enhanced capability and survivability. IET Electr. Syst. Transp. 2011, 1, 137–147. [Google Scholar]
- Park, J.; Candelaria, J.; Ma, L.; Dunn, K. DC Ring-Bus Microgrid Fault Protection and Identification of Fault Location. IEEE Trans. Power Deliv. 2013, 28, 2574–2584. [Google Scholar] [CrossRef]
- Park, J.-D.; Candelaria, J. Fault Detection and Isolation in Low-Voltage DC-Bus Microgrid System. IEEE Trans. Power Deliv. 2013, 28, 779–787. [Google Scholar] [CrossRef]
- Salomonsson, D.; Soder, L.; Sannino, A. Protection of Low-Voltage DC Microgrids. IEEE Trans. Power Deliv. 2009, 24, 1045–1053. [Google Scholar] [CrossRef]
- Yang, J.; Fletcher, J.E.; O’Reilly, J. Short-Circuit and Ground Fault Analyses and Location in VSC-Based DC Network Cables. IEEE Trans. Ind. Electron. 2012, 59, 3827–3837. [Google Scholar] [CrossRef]
- Aswani, J.; Kanakasabapathy, P. Protection of a low-voltage DC ring microgrid system. In Proceedings of the 2016 International Conference on Energy Efficient Technologies for Sustainability (ICEETS), Nagercoil, India, 7–8 April 2016; Volume 24, pp. 17–22. [Google Scholar]
- Monadi, M.; Amin Zamani, M.; Ignacio Candela, J.; Luna, A.; Rodriguez, P. Protection of AC and DC distribution systems Embedding distributed energy resources: A comparative review and analysis. Renew. Sustain. Energy Rev. 2015, 51, 1578–1593. [Google Scholar] [CrossRef]
- Nuutinen, P.; Kaipia, T.; Peltoniemi, P.; Lana, A.; Pinomaa, A.; Mattsson, A.; Silventoinen, P.; Partanen, J.; Lohjala, J.; Matikainen, M. Research Site for Low-Voltage Direct Current Distribution in a Utility Network—Structure, Functions, and Operation. IEEE Trans. Smart Grid 2014, 5, 2574–2582. [Google Scholar] [CrossRef]
- Diaz, E.R.; Su, X.; Savaghebi, M.; Vasquez, J.C.; Han, M.; Guerrero, J.M. Intelligent DC Microgrid living Laboratories—A Chinese-Danish cooperation project. In Proceedings of the 2015 IEEE First International Conference on DC Microgrids (ICDCM), Atlanta, GA, USA, 7–10 June 2015; pp. 365–370. [Google Scholar]
- Kim, J.; Lee, H.; Kim, J. Design and Construction of Korean LVDC Distribution System for Supplying DC Power to Customer. In Proceedings of the 23rd International Conference on Electricity Distribution, Lyon, France, 15–18 June 2015; pp. 15–18. [Google Scholar]
- Nakanishi, T.; Orikawa, K.; Itoh, J. Modular Multilevel Converter for wind power generation system connected to micro-grid. In Proceedings of the 2014 International Conference on Renewable Energy Research and Application (ICRERA), Milwaukee, WI, USA, 19–22 October 2014; pp. 653–658. [Google Scholar]
- Staudt, V.; Jager, M.K.; Rothstein, A.; Steimel, A.; Meyer, D.; Bartelt, R.; Heising, C. Short-circuit protection in DC ship grids based on MMC with full-bridge modules. In Proceedings of the 2015 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles (ESARS), Aachen, Germany, 3–5 March 2015; Volume 2015–May, pp. 1–5. [Google Scholar]
- Zhong, Y.; Roscoe, N.M.; Finney, S.J.; Holliday, D. MMC with Parallel-connected MOSFETs for LVDC Distribution Networks. In Proceedings of the 8th IET International Conference on Power Electronics, Machines and Drives (PEMD 2016); Institution of Engineering and Technology: Michael Faraday House, Stevenage, 2016; pp. 1–6. [Google Scholar]
- Kontos, E.; Pinto, R.T.; Bauer, P. Fast DC fault recovery technique for H-bridge MMC-based HVDC networks. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 3351–3358. [Google Scholar]
- Ryu, M.H.; Kim, H.S.; Baek, J.W.; Kim, H.G.; Jung, J.H. Effective test bed of 380-V DC distribution system using isolated power converters. IEEE Trans. Ind. Electron. 2015, 62, 4525–4536. [Google Scholar] [CrossRef]
- Naayagi, R.T.; Forsyth, A.J.; Shuttleworth, R. High-Power Bidirectional DC–DC Converter for Aerospace Applications. IEEE Trans. Power Electron. 2012, 27, 4366–4379. [Google Scholar] [CrossRef]
- Oggier, G.G.; GarcÍa, G.O.; Oliva, A.R. Switching Control Strategy to Minimize Dual Active Bridge Converter Losses. IEEE Trans. Power Electron. 2009, 24, 1826–1838. [Google Scholar] [CrossRef]
- Zhao, B.; Yu, Q.; Sun, W. Extended-Phase-Shift Control of Isolated Bidirectional DC–DC Converter for Power Distribution in Microgrid. IEEE Trans. Power Electron. 2012, 27, 4667–4680. [Google Scholar] [CrossRef]
- Krismer, F.; Kolar, J.W. Accurate Power Loss Model Derivation of a High-Current Dual Active Bridge Converter for an Automotive Application. IEEE Trans. Ind. Electron. 2010, 57, 881–891. [Google Scholar] [CrossRef]
- Tan, N.M.L.; Abe, T.; Akagi, H. Design and Performance of a Bidirectional Isolated DC–DC Converter for a Battery Energy Storage System. IEEE Trans. Power Electron. 2012, 27, 1237–1248. [Google Scholar] [CrossRef]
- Krismer, F.; Kolar, J.W. Efficiency-Optimized High-Current Dual Active Bridge Converter for Automotive Applications. IEEE Trans. Ind. Electron. 2012, 59, 2745–2760. [Google Scholar] [CrossRef]
- Garcia, O.; Flores, L.A.; Oliver, J.A.; Cobos, J.A.; de la Pena, J. Bi-directional DC/DC Converter for Hybrid Vehicles. In Proceedings of the IEEE 36th Conference on Power Electronics Specialists, Recife, Brazil, 16 June 2005; Volume 2005, pp. 1881–1886. [Google Scholar]
- Wu, T.-F.; Chen, Y.-C.; Yang, J.-G.; Kuo, C.-L. Isolated Bidirectional Full-Bridge DC–DC Converter With a Flyback Snubber. IEEE Trans. Power Electron. 2010, 25, 1915–1922. [Google Scholar]
- Zhu, L. A novel soft-commutating isolated boost full-bridge ZVS-PWM DC-DC converter for bidirectional high power applications. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No. 04CH37551), Aachen, Germany, 20–25 June 2004; pp. 2141–2146. [Google Scholar]
- Virdag, A.; Hager, T.; Hu, J.; Doncker, R.W.D. Short circuit behavior of Dual Active Bridge DCDC converter with low resistance DC side fault. In Proceedings of the 2017 IEEE 8th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Florianopolis, Brazil, 17–20 April 2017; pp. 1–6. [Google Scholar]
- Baran, M.E.; Mahajan, N.R. Overcurrent Protection on Voltage-Source-Converter-Based Multiterminal DC Distribution Systems. IEEE Trans. Power Deliv. 2007, 22, 406–412. [Google Scholar] [CrossRef]
- Tang, L.; Ooi, B.-T. Protection of VSC-multi-terminal HVDC against DC faults. In Proceedings of the 2002 IEEE 33rd Annual IEEE Power Electronics Specialists Conference (Cat. No. 02CH37289), Cairns, Australia, 23–27 June 2002; Volume 2, pp. 719–724. [Google Scholar]
- Lee, C.H.; Lu, C.J. Assessment of grounding schemes on rail potential and stray currents in a DC transit system. IEEE Trans. Power Deliv. 2006, 21, 1941–1947. [Google Scholar] [CrossRef]
- Lee, C.-H.; Wang, H.-M. Effects of grounding schemes on rail potential and stray currents in Taipei rail transit systems. IEE Proc. Electr. Power Appl. 2001, 148, 148–154. [Google Scholar] [CrossRef]
- Paul, D. DC traction power system grounding. IEEE Trans. Ind. Appl. 2002, 38, 818–824. [Google Scholar] [CrossRef]
- Cotton, I.; Charalambous, C.; Aylott, P.; Ernst, P. Stray Current Control in DC Mass Transit Systems. IEEE Trans. Veh. Technol. 2005, 54, 722–730. [Google Scholar] [CrossRef]
- Chen, S.-L.; Hsu, S.-C.; Tseng, C.-T.; Yan, K.-H.; Chou, H.-Y.; Too, T.-M. Analysis of Rail Potential and Stray Current for Taipei Metro. IEEE Trans. Veh. Technol. 2006, 55, 67–75. [Google Scholar] [CrossRef]
- Park, J.-D. Ground Fault Detection and Location for Ungrounded DC Traction Power Systems. IEEE Trans. Veh. Technol. 2015, 64, 5667–5676. [Google Scholar] [CrossRef]
- IEEE Std. 1709–2010. IEEE Recommended Practice for 1 kV to 35 kV Medium-Voltage DC Power Systems on Ships; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Nejadpak, A.; Sarikhani, A.; Mohammed, O.A. Analysis of Radiated EMI and Noise Propagation in Three-Phase Inverter System Operating Under Different Switching Patterns. IEEE Trans. Magn. 2013, 49, 2213–2216. [Google Scholar] [CrossRef]
- Leterme, W.; Tielens, P.; De Boeck, S.; Van Hertem, D. Overview of Grounding and Configuration Options for Meshed HVDC Grids. IEEE Trans. Power Deliv. 2014, 29, 2467–2475. [Google Scholar] [CrossRef]
- Le Blond, S.; Bertho, R.; Coury, D.V.; Vieira, J.C.M. Design of protection schemes for multi-terminal HVDC systems. Renew. Sustain. Energy Rev. 2016, 56, 965–974. [Google Scholar] [CrossRef]
- Masoud, M.I. Fully controlled 5-phase, 10-pulse, line commutated rectifier. Alex. Eng. J. 2015, 54, 1091–1104. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of Charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef]
- Jian, C.; Emadi, A. A new battery/ultra-capacitor hybrid energy storage system for electric, hybrid and plug-in hybrid electric vehicles. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–11 September 2009; pp. 941–946. [Google Scholar]
- Zhou, H.; Bhattacharya, T.; Tran, D.; Siew, T.S.T.; Khambadkone, A.M. Composite Energy Storage System Involving Battery and Ultracapacitor With Dynamic Energy Management in Microgrid Applications. IEEE Trans. Power Electron. 2011, 26, 923–930. [Google Scholar] [CrossRef]
- Emhemed, A.A.S.; Fong, K.; Fletcher, S.; Burt, G.M. Validation of Fast and Selective Protection Scheme for an LVDC Distribution Network. IEEE Trans. Power Deliv. 2017, 32, 1432–1440. [Google Scholar] [CrossRef]
- Tokuyama, S.; Arimatsu, K.; Yoshioka, Y.; Kato, Y.; Hirata, K. Development and Interrupting Tests on 250KV 8KA HVDC Circuit Breaker. IEEE Power Eng. Rev. 1985, PER-5, 42–43. [Google Scholar] [CrossRef]
- Pauli, B.; Mauthe, G.; Ruoss, E.; Ecklin, G.; Porter, J.; Vithayathil, J. Development of a high current HVDC circuit breaker with fast fault clearing capability. IEEE Trans. Power Deliv. 1988, 3, 2072–2080. [Google Scholar] [CrossRef]
- Zhang, Y.; Ravishankar, J.; Fletcher, J.; Li, R.; Han, M. Review of modular multilevel converter based multi-terminal HVDC systems for offshore wind power transmission. Renew. Sustain. Energy Rev. 2016, 61, 572–586. [Google Scholar] [CrossRef]
- Ela, E.; Kirby, B.; Navid, N.; Smith, J.C. A low loss mechanical HVDC breaker for HVDC Grid applications. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; Volume 2016, pp. 1–8. [Google Scholar]
- Liu, L.; Zhuang, J.; Wang, C.; Jiang, Z.; Wu, J.; Chen, B. A Hybrid DC Vacuum Circuit Breaker for Medium Voltage: Principle and First Measurements. IEEE Trans. Power Deliv. 2015, 30, 2096–2101. [Google Scholar] [CrossRef]
- Tamura, S.; Shimada, R.; Kito, Y.; Kanai, Y.; Koike, H.; Ikeda, H.; Yanabu, S. Parallel Interruption of Heavy Direct Current by Vacuum Circuit Breakers. IEEE Trans. Power Appar. Syst. 1980, PAS-99, 1119–1129. [Google Scholar] [CrossRef]
- Eaton. PVGard 600 and 1000 Vdc Solar Photovoltaic Circuit Breakers; Eaton: Dublin, Ireland, 2014. [Google Scholar]
- ABB. Technical Application Papers No. 14 Faults in LVDC Microgrids with Front-End Converters; ABB Group: Zürich, Switzerland, 2015. [Google Scholar]
- Meyer, C.; Schroder, S.; DeDoncker, R.W. Solid-State Circuit Breakers and Current Limiters for Medium-Voltage Systems Having Distributed Power Systems. IEEE Trans. Power Electron. 2004, 19, 1333–1340. [Google Scholar] [CrossRef]
- Lawes, D.; Ran, L.; Xu, Z. Design of a solid-state D.C. circuit breaker for light rail transit power supply network. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 350–357. [Google Scholar]
- Krstic, S.; Wellner, E.L.; Bendre, A.R.; Semenov, B. Circuit breaker technologies for advanced ship power systems. In Proceedings of the 2007 IEEE Electric Ship Technologies Symposium, Arlington, VA, USA, 21–23 May 2007; pp. 201–207. [Google Scholar]
- Shen, Z.J.; Sabui, G.; Miao, Z.; Shuai, Z. Wide-Bandgap Solid-State Circuit Breakers for DC Power Systems: Device and Circuit Considerations. IEEE Trans. Electron Devices 2015, 62, 294–300. [Google Scholar] [CrossRef]
- Franck, C.M. HVDC Circuit Breakers: A Review Identifying Future Research Needs. IEEE Trans. Power Deliv. 2011, 26, 998–1007. [Google Scholar] [CrossRef]
- Meyer, C.; Kowal, M.; De Doncker, R.W. Circuit breaker concepts for future high-power DC-applications. In Proceedings of the Fourtieth IAS Annual Meeting. Conference Record of the 2005 Industry Applications Conference, Hong Kong, China, 2–6 October 2005; Volume 2, pp. 860–866. [Google Scholar]
- Sano, K.; Takasaki, M. A Surgeless Solid-State DC Circuit Breaker for Voltage-Source-Converter-Based HVDC Systems. IEEE Trans. Ind. Appl. 2014, 50, 2690–2699. [Google Scholar] [CrossRef]
- Callavik, M.; Blomberg, A.; Häfner, J.; Jacobson, B. The Hybrid HVDC Breaker, An innovation breakthrough enabling reliable HVDC grids. In Proceedings of the ABB Grid Systems; ABB Group: Zürich, Switzerland, 2012. [Google Scholar]
- Häfner, J.; Jacobson, B. Proactive Hybrid HVDC Breakers—A key innovation for reliable HVDC grids. In Proceedings of the The Electric Power System of the Future—Integrating Supergrids and Microgrids International Symposium, Bologna, Italy, 13–15 September 2011; p. 9. [Google Scholar]
- Chen, D.; Xu, L.; Yu, J. Adaptive DC Stabilizer with Reduced DC Fault Current for Active Distribution Power System Application. IEEE Trans. Power Syst. 2017, 32, 1430–1439. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, T.; Yang, J.; Qi, Q.; Xiao, L.; Zhang, G.; Lin, L. Resistance varying characteristics of DC superconducting fault current limiter in MTDC system. Cryogenics 2017, 81, 1–7. [Google Scholar] [CrossRef]
- Colmenar-Santos, A.; Pecharromán-Lázaro, J.M.; de Palacio Rodríguez, C.; Collado-Fernández, E. Performance analysis of a Superconducting Fault Current Limiter in a power distribution substation. Electr. Power Syst. Res. 2016, 136, 89–99. [Google Scholar] [CrossRef]
- Ishigohka, T.; Sasaki, N. Fundamental test of new DC superconducting fault current limiter. IEEE Trans. Magn. 1991, 27, 2341–2344. [Google Scholar] [CrossRef]
- Blair, S.M.; Booth, C.D.; Elders, I.M.; Singh, N.K.; Burt, G.M.; McCarthy, J. Superconducting fault current limiter application in a power-dense marine electrical system. IET Electr. Syst. Transp. 2011, 1, 93–102. [Google Scholar] [CrossRef]
- Fletcher, S.D.A.; Norman, P.J.; Galloway, S.J.; Crolla, P.; Burt, G.M. Optimizing the Roles of Unit and Non-unit Protection Methods Within DC Microgrids. IEEE Trans. Smart Grid 2012, 3, 2079–2087. [Google Scholar] [CrossRef]
- Saleh, K.A.; Hooshyar, A.; El-Saadany, E.F. Hybrid Passive-Overcurrent Relay for Detection of Faults in Low-Voltage DC Grids. IEEE Trans. Smart Grid 2017, 8, 1129–1138. [Google Scholar] [CrossRef]
- Vanteddu, S.R.B.; Mohamed, A.; Mohammed, O. Protection design and coordination of DC Distributed Power Systems Architectures. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Cairoli, P.; Kondratiev, I.; Dougal, R.A. Coordinated Control of the Bus Tie Switches and Power Supply Converters for Fault Protection in DC Microgrids. IEEE Trans. Power Electron. 2013, 28, 2037–2047. [Google Scholar] [CrossRef]
- Madingou, G.; Zarghami, M.; Vaziri, M. Fault detection and isolation in a DC microgrid using a central processing unit. In Proceedings of the 2015 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 18–20 Febuary 2015; pp. 1–5. [Google Scholar]
- Tang, L.; Ooi, B. Locating and Isolating DC Faults in Multi-Terminal DC Systems. IEEE Trans. Power Deliv. 2007, 22, 1877–1884. [Google Scholar] [CrossRef]
- Fletcher, S.D.A.; Norman, P.J.; Galloway, S.J.; Burt, G.M. Analysis of the effectiveness of non-unit protection methods within DC microgrids. In Proceedings of the IET Conference on Renewable Power Generation (RPG 2011), Edinburgh, UK, 6–8 September 2011; p. 111. [Google Scholar]
- Emhemed, A.A.S.; Burt, G.M. An Advanced Protection Scheme for Enabling an LVDC Last Mile Distribution Network. IEEE Trans. Smart Grid 2014, 5, 2602–2609. [Google Scholar] [CrossRef]
- Meghwani, A.; Chakrabarti, S.; Srivastava, S.C. A fast scheme for fault detection in DC microgrid based on voltage prediction. In Proceedings of the 2016 National Power Systems Conference (NPSC), Bhubaneswar, India, 19–21 December 2016; pp. 1–6. [Google Scholar]
- Alluhaidan, M.; Almutairy, I. Modeling and Protection for Low-Voltage DC Microgrids Riding Through Short Circuiting. Procedia Comput. Sci. 2017, 114, 457–464. [Google Scholar] [CrossRef]
- Mohanty, R.; Pradhan, A.K. DC Ring Bus Microgrid Protection Using the Oscillation Frequency and Transient Power. IEEE Syst. J. 2018, 13, 875–884. [Google Scholar] [CrossRef]
- Abu-Elanien, A.E.B.; Elserougi, A.A.; Abdel-Khalik, A.S.; Massoud, A.M.; Ahmed, S. A differential protection technique for multi-terminal HVDC. Electr. Power Syst. Res. 2016, 130, 78–88. [Google Scholar] [CrossRef]
- Monadi, M.; Koch-Ciobotaru, C.; Luna, A.; Candela, J.I.; Rodriguez, P. A protection strategy for fault detection and location for multi-terminal MVDC distribution systems with renewable energy systems. In Proceedings of the 2014 International Conference on Renewable Energy Research and Application (ICRERA), Milwaukee, WI, USA, 19–22 October 2014; pp. 496–501. [Google Scholar]
- Fletcher, S.D.A.; Norman, P.J.; Fong, K.; Galloway, S.J.; Burt, G.M. High-Speed Differential Protection for Smart DC Distribution Systems. IEEE Trans. Smart Grid 2014, 5, 2610–2617. [Google Scholar] [CrossRef]
- Weaver, W.W.; Robinett, R.D.; Parker, G.G.; Wilson, D.G. Distributed control and energy storage requirements of networked Dc microgrids. Control Eng. Pract. 2015, 44, 10–19. [Google Scholar] [CrossRef]
- Farhangi, H. The path of the smart grid. IEEE Power Energy Mag. 2010, 8, 18–28. [Google Scholar] [CrossRef]
- Farhadi, M.; Mohammed, O.A. Event-Based Protection Scheme for a Multiterminal Hybrid DC Power System. IEEE Trans. Smart Grid 2015, 6, 1658–1669. [Google Scholar] [CrossRef]
- Christopher, E.; Sumner, M.; Thomas, D.W.P.; Wang, X.; de Wildt, F. Fault Location in a Zonal DC Marine Power System Using Active Impedance Estimation. IEEE Trans. Ind. Appl. 2013, 49, 860–865. [Google Scholar] [CrossRef]
- Meghwani, A.; Srivastava, S.C.; Chakrabarti, S. A Non-unit Protection Scheme for DC Microgrid Based on Local Measurements. IEEE Trans. Power Deliv. 2017, 32, 172–181. [Google Scholar] [CrossRef]
- Jia, K.; Sumner, M.; Christopher, E.; Bi, T.; Thomas, D. Advanced DC zonal marine power system protection. IET Gener. Transm. Distrib. 2014, 8, 301–309. [Google Scholar] [CrossRef]
- Mohanty, R.; Balaji, U.S.M.; Pradhan, A.K. An Accurate Noniterative Fault-Location Technique for Low-Voltage DC Microgrid. IEEE Trans. Power Deliv. 2016, 31, 475–481. [Google Scholar] [CrossRef]
- Feng, X.; Qi, L.; Pan, J. A Novel Fault Location Method and Algorithm for DC Distribution Protection. IEEE Trans. Ind. Appl. 2017, 53, 1834–1840. [Google Scholar] [CrossRef]
- Meghwani, A.; Srivastava, S.C.; Chakrabarti, S. Local measurement-based technique for estimating fault location in multi-source DC microgrids. IET Gener. Transm. Distrib. 2018, 12, 3305–3313. [Google Scholar] [CrossRef]
- Pan, Y.; Steurer, M.; Baldwin, T.L. Ground Fault Location Testing of a Noise-Pattern-Based Approach on an Ungrounded DC System. IEEE Trans. Ind. Appl. 2011, 47, 996–1002. [Google Scholar] [CrossRef]
- Pan, Y.; Silveira, P.M.; Steurer, M.; Baldwin, T.L.; Ribeiro, P.F. A fault location approach for high-impedance grounded DC shipboard power distribution systems. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; Volume 37, pp. 1–6. [Google Scholar]
- Mitchell, H.B. Image Fusion; Springer: Berlin/Heidelberg, Germany, 2010; ISBN 978-3-642-11215-7. [Google Scholar]
- Jia, K.; Li, M.; Bi, T.; Yang, Q. A voltage resonance-based single-ended online fault location algorithm for DC distribution networks. Sci. China Technol. Sci. 2016, 59, 721–729. [Google Scholar] [CrossRef]
- Xue, S.-M.X.; Liu, C. Line-to-Line Fault Analysis and Location in a VSC-Based Low-Voltage DC Distribution Network. Energies 2018, 11, 536. [Google Scholar]
- Bose, B.K. Expert system, fuzzy logic, and neural network applications in power electronics and motion control. Proc. IEEE 1994, 82, 1303–1323. [Google Scholar] [CrossRef]
- Filippetti, F.; Franceschini, G.; Tassoni, C.; Vas, P. Recent developments of induction motor drives fault diagnosis using AI techniques. IEEE Trans. Ind. Electron. 2000, 47, 994–1004. [Google Scholar] [CrossRef]
- Chanda, N.K.; Fu, Y. ANN-based fault classification and location in MVDC shipboard power systems. In Proceedings of the 2011 North American Power Symposium, Boston, MA, USA, 4–6 August 2011; pp. 1–7. [Google Scholar]
- De Kerf, K.; Srivastava, K.; Reza, M.; Bekaert, D.; Cole, S.; Van Hertem, D.; Belmans, R. Wavelet-based protection strategy for DC faults in multi-terminal VSC HVDC systems. IET Gener. Transm. Distrib. 2011, 5, 496–503. [Google Scholar] [CrossRef]
- Li, W.; Monti, A.; Ponci, F. Fault Detection and Classification in Medium Voltage DC Shipboard Power Systems With Wavelets and Artificial Neural Networks. IEEE Trans. Instrum. Meas. 2014, 63, 2651–2665. [Google Scholar] [CrossRef]
- Chang, C.S.; Xu, Z.; Khambadkone, A. Enhancement and laboratory implementation of neural network detection of short circuit faults in DC transit system. IEE Proc. Electr. Power Appl. 2003, 150, 344–350. [Google Scholar] [CrossRef]
- Bououden, S.; Chadli, M.; Zelinka, I. LMI Approach of Constrained Fuzzy Model Predictive Control Control of DC-DC Boost Converter. In Advances in Intelligent Systems and Computing; Zelinka, I., Suganthan, P.N., Chen, G., Snasel, V., Abraham, A., Rössler, O., Eds.; Springer International Publishing: Cham, Switzerland, 2014; Volume 289, ISBN 978-3-319-07400-9. [Google Scholar]
- Saifia, D.; Chadli, M.; Labiod, S.; Karimi, H.R. Fuzzy Control of DC-DC Converters with Input Constraint. Math. Probl. Eng. 2012, 2012, 973082. [Google Scholar] [CrossRef]
- Akhenak, A.; Chadli, M.; Maquin, D.; Ragot, J. Sliding mode multiple observer for fault detection and isolation. In Proceedings of the 42nd IEEE International Conference on Decision and Control (IEEE Cat. No. 03CH37475), Maui, HI, USA, 9–12 December 2003; Volume 1, pp. 953–958. [Google Scholar]
- Zadsar, M.; Haghifam, M.R.; Miri Larimi, S.M. Approach for self-healing resilient operation of active distribution network with microgrid. IET Gener. Transm. Distrib. 2017, 11, 4633–4643. [Google Scholar] [CrossRef]
- Butler-Purry, K.L.; Sarma, N.D.R. Self-healing reconfiguration for restoration of naval shipboard power systems. IEEE Trans. Power Syst. 2004, 19, 754–762. [Google Scholar] [CrossRef]
- Ericsen, T.; Hingorani, N.; Khersonsky, Y. Power electronics and future marine electrical systems. IEEE Trans. Ind. Appl. 2006, 42, 155–163. [Google Scholar] [CrossRef]
- Cuzner, R.M.; Venkataramanan, G. The Status of DC Micro-Grid Protection. In Proceedings of the 2008 IEEE Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008; pp. 1–8. [Google Scholar]
- Baran, M.E.; Mahajan, N. System reconfiguration on shipboard DC zonal electrical system. In Proceedings of the IEEE Electric Ship Technologies Symposium, Philadelphia, PA, USA, 27 July 2005; Volume 2005, pp. 86–92. [Google Scholar]
- Li, G.; Liang, J.; Ugalde-Loo, C.E.; Coventry, P.; Rimez, J. Dynamic interactions of DC and AC grids subject to DC faults. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 2627–2633. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protection Schemes | Working Principal | Claimed Operation Time | Proposed Functions | Suggested Configuration |
|---|---|---|---|---|
| Overcurrent [48,88] | I > Ith | <2 ms—Low Impedance Faults & <5 ms—High Impedance Fault | Fault Detection | LVDC Test Grid based on IEEE 14-bus system & Interconnected Topology |
| di/dt [26,105] | Idiff > dI/dt | <0.1 ms—Solid Fault & <0.2 ms—Low/High Impedance Fault | Fault Detection | Ring Topology |
| Voltage Estimation [95] | ΔV > Vth | <0.5 ms | Fault Detection | Ring Topology |
| Handshaking [92] | ΔI > Δ Ith | Takes approx. <0.3 s For the complete operation | Fault Detection, Location and Isolation | Ring Topology |
| Differential [24] | Idiff =|Iin + Iout| > Ith | <2 ms | Fault Detection and Isolation | Single bus & Ring Topology |
| Artificial Inductive [103] | Based on dI/dt | Takes approx. <30 ms For the complete operation | Fault Detection, Location and Isolation | Interconnected Topology |
| Active Distance Estimation [24,106] | Based on dI/dt & I > Ith | Takes approx. <60 ms For the complete operation | Fault Detection, Location and Isolation | Ring Topology |
| Fault Resistance (in Ω) | ||||||||
|---|---|---|---|---|---|---|---|---|
| 0.5 | 1.0 | 1.5 | 2.0 | |||||
| Length (%) | E1 (%) | E2 (%) | E1 | E2 | E1 | E2 | E1 | E2 |
| 20 | 0.943 | 0.421 | 4.231 | 2.114 | 8.322 | 3.887 | 8.225 | 5.219 |
| 40 | 0.713 | 0.212 | 2.312 | 0.956 | 4.856 | 2.014 | 8.065 | 3.843 |
| 60 | 0.708 | 0.465 | 1.887 | 0.692 | 4.132 | 1.956 | 6.759 | 2.935 |
| 80 | 0.362 | 0.154 | 1.342 | 0.658 | 2.721 | 1.343 | 4.441 | 2.272 |
| 100 | 0.389 | 0.184 | 1.086 | 0.458 | 2.473 | 1.224 | 3.843 | 1.943 |
| Fault Locating Schemes | Type | Indicative Fault Locating Time | General Proposed Application | Indicative Max. Error |
|---|---|---|---|---|
| Active Distance Estimation [24,104,106,107] | Offline | 20 ms | Pole-to-Pole fault only | 7%–8% |
| Derivative based [108,109] | Online | 0.65 ms–0.75 ms | Pole-to-Pole & Pole-to-ground | 2%–20% |
| Noise pattern based [110,111] | Online | - | Pole-to-ground in unearthed system | - |
| Voltage Resonance based [113] | Online | >1.6 ms | Pole-to-Pole only | <1% |
| Transient Peak Current based [114] | Online | >2 ms | Pole-to-Pole only | <13% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Javed, W.; Chen, D.; Farrag, M.E.; Xu, Y. System Configuration, Fault Detection, Location, Isolation and Restoration: A Review on LVDC Microgrid Protections. Energies 2019, 12, 1001. https://doi.org/10.3390/en12061001
Javed W, Chen D, Farrag ME, Xu Y. System Configuration, Fault Detection, Location, Isolation and Restoration: A Review on LVDC Microgrid Protections. Energies. 2019; 12(6):1001. https://doi.org/10.3390/en12061001
Chicago/Turabian StyleJaved, Waqas, Dong Chen, Mohamed Emad Farrag, and Yan Xu. 2019. "System Configuration, Fault Detection, Location, Isolation and Restoration: A Review on LVDC Microgrid Protections" Energies 12, no. 6: 1001. https://doi.org/10.3390/en12061001
APA StyleJaved, W., Chen, D., Farrag, M. E., & Xu, Y. (2019). System Configuration, Fault Detection, Location, Isolation and Restoration: A Review on LVDC Microgrid Protections. Energies, 12(6), 1001. https://doi.org/10.3390/en12061001