1. Introduction
As a basic tool for static voltage stability analysis of power system, the continuation power flow (CPF) method has been widely used in the security analysis and it has become a core function in the energy management systems [
1,
2]. With the continuous development of electrical technology, the modern power system already has the characteristics of multi-area AC/DC interconnection [
3], long-distance bulk power transmission, and large-scale renewable energy connection [
4].
Under this new situation, the voltage source converter (VSC)-based multi-terminal direct current (MTDC) transmission network becomes a highly potential optimal scheme for interconnected tie-lines [
3,
5,
6], because of its features of active and reactive powers that can be controlled independently [
7], immunization to commutation failure, and easy to extend to multi-terminal networks [
8]. Most studies about VSC-MTDC focus on the steady-state power flow model [
7,
8,
9,
10], electromechanical stability [
11,
12] and control strategies [
13,
14,
15,
16], while related researches in the field of CPF are very few [
17,
18,
19]. In reference [
17], the continuous parameter at the present operation point is determined by an integrated prediction calculation firstly, and then an AC/DC power flow algorithm based on alternating iterations will update the values of state variables. The effect of different VSC controlling values on the voltage stability margin (VSM) is also discussed in [
17]. Reference [
18] derived the computational formula for sensitivities of the load margin with respect to the active and reactive power control parameters of VSCs. Based on the above sensitivities, an adjustment strategy for the control parameter values is introduced. However, the corresponding studies in the field of CPF cannot reflect the switching characteristics of reactive power control behaviors of the VSC stations during the load growth.
Most recent research conducted in the field of CPF has focused on the problem of poor condition at the saddle-node bifurcation point [
20,
21,
22] and the nonlinear effect of varying parameters, such as transmission branch parameters [
23,
24] and power injections [
25]. Nevertheless, all existing studies are for the independent regional grid, and little attention is paid to the market trading behaviors and the power limitation of tie-lines in the interconnected systems. The voltage stability margin (VSM) calculated by the CPF model can evaluate the maximum load increment in the interconnected systems correctly only by fully considering the influence of the bilateral power trading contracts (BPTC) among regional subsystems and accurately simulating the power control behaviors of tie-lines.
The current AC/DC interconnected bulk systems still have the following problems that need to be solved when the CPF method is applied:
1. Simulation for the influence of BPTC on VSM
In the electricity market environment, the directional trading active power (DTAP) transmitted between interconnected subsystems is determined using the BPTC and it cannot be changed during the contract period even if the inner power flow of subsystems varies. This limitation is an essential difference between the interconnected bulk systems and the independent regional grid. However, this issue is neglected in the existing literatures on CPF.
The automatic generation control (AGC) system is usually installed in the dispatching and control centers of each subsystem. With the real-time adjustment of AGC system, the total DTAP via the interconnected interface can approximate the predefined set value. Accurately simulating the control behaviors of AGC units is difficult when the CPF model that considers BPTC is established.
2. Security control for power allocation of tie-lines
Multiple transmission tie-lines are usually between subsystems, and the power allocation of tie-lines is determined by the impedance of branches and power injections. When the power injections change unevenly, under the constraint of keeping the total active power transmitted via the interface constant, the power allocation proportion of tie-lines will change considerably. In extreme situations, serious overload or severe unbalanced power distribution in tie-lines may occur. Therefore, in actual interconnected systems, the total balance of active power via the transmission interface should be guaranteed. Moreover, the selected AGC units or even the units participating in the distribution of load increment should not affect the power transfer security of tie-lines.
The variation of the power allocation of tie-lines is ignored in existing CPF models, which only focus on independent grid or simply render the tie-lines to be equal to the constant PQ load. This negligence will introduce a significant deviation in the calculation of VSM.
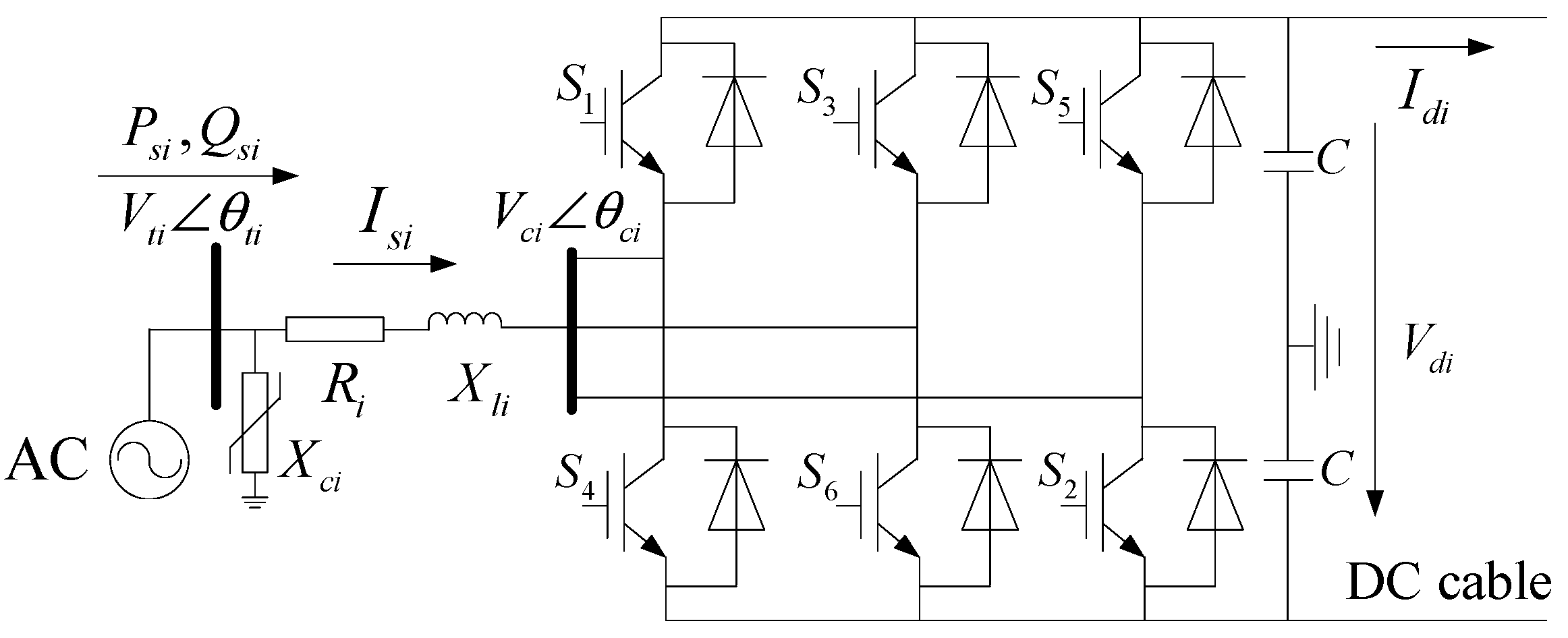
3. Simulation for switching characteristics of reactive power control behaviors of VSC stations
The ability of VSC converter to independently control the reactive power results in two different representations in the power flow algorithms, namely constant reactive power injection
into AC grid and the constant AC bus voltage magnitude
[
8]. Therefore, the PQ or PV mode is usually used to represent the reactive power control behaviors of VSCs in most power flow models on VSC-MTDC [
26,
27]. The switching characteristics of reactive power control behaviors of VSC stations should be considered during the load growth. For example, when the PQ mode is initially adopted, the voltage magnitude of the AC bus connecting to the VSC will decrease gradually with the load increase in the AC network. Once the voltage magnitude is below the lower security limit, the control mode of the VSC should be switched from PQ to PV mode. Similarly, when the PV mode is adopted during load growth and the reactive power injection into the AC grid exceeds its maximum adjustment range, the control mode of the VSC should be switched from PV to PQ mode. Accurately simulating the switching characteristics of reactive power control behaviors of VSC stations is a key problem to be solved in CPF models.
To address the three aforementioned problems, the present work proposes a novel CPF model for multi-area AC/DC interconnected bulk systems incorporating VSC-MTDC network (herein, M-AC/VSC-MTDC systems). In view of the influence of BPTC among regional subsystems, the nonlinear constraint equations of DTAP via the interface are derived, and a multi-balancing machine strategy is introduced to realize the active power balance of each subsystem. An accurate simulation method, which includes a specific selection strategy for AGC units and a generation re-dispatch strategy, is proposed to simulate the security control behaviors of the power allocation of tie-lines for avoiding serious overload or severe unbalanced power distribution of tie-lines during load growth. Furthermore, the VSC-MTDC network is considered in the proposed CPF model, and a specific switching strategy for VSC controlling modes is developed to simulate the actual reactive power control behaviors of the VSC-MTDC network. All loads are assumed to increase simultaneously for the sake of emphasizing the study’s focus.
In order to solve the proposed CPF model, a novel decoupling CPF algorithm based on bi-directional iteration is also presented to realize the decomposition and coordination calculation between AC systems and DC systems. The characteristics of this decoupling algorithm are summarized as follows: (1) The decomposition and coordination process of AC and DC systems are based on strictly equivalent linear transformation, hence, this decoupling algorithm can preserve the precision and convergence of integrated CPF algorithms. (2) This decoupling CPF algorithm simplifies the hybrid AC/DC prediction equation and correction equation, eliminates 6/7 DC variables, therefore it has an apparent advantage on the calculation speed by comparing with the integrated algorithms. (3) This decoupling algorithm can easily reflects the effects of the control mode changes of VSC stations to the voltage stability margin of AC system. With the proposed decoupling algorithm, when the control modes of VSC stations change, only several coefficient matrices that represent the interaction between the AC system and DC system should be altered, and the prediction equation and correction equation of AC system are not required to be modified.
The remainder of this paper is organized as follows. In
Section 2, the power flow model for the VSC-MTDC and the nonlinear constraint equations of DTAP are derived.
Section 3 elaborates the proposed CPF model for M-AC/VSC-MTDC interconnected systems.
Section 4 describes the decoupling algorithm for the proposed CPF model. In
Section 5, five schemes are tested on the IEEE two-area RTS-96 system. The simulations, comparisons, and analysis indicate the effectiveness and validity of the proposed CPF model and decoupling algorithm. Finally,
Section 6 concludes the paper.
4. Bi-Directional Iteration Algorithm for the Proposed CPF Model
The proposed CPF model, namely (15) can be divided into two parts: the constraint equations of VSC-MTDC network, which refer to D(•); the constraint equations of AC systems, which consist of f(•), S(•) and (•). By observing the proposed CPF model, the following characteristics can be found:
- (1)
The constraint equations of AC and DC systems have common variables , and .
- (2)
According to the constraint equations of VSC-MTDC network, when there are n VSC converters, then number of the corresponding constraint equations is 6n, and that of the variables is 7n. The difference between the numbers of equations and variables makes the linear transformation possible.
Based on the above characteristic, a novel decoupling CPF algorithm based on bi-directional iteration is proposed in this section to realize the decomposition and coordination calculation between AC systems and DC systems. For the convenience of description, the variables in DC constraint equations () are defined as DC variables while the variable x in AC constraint equations is defined as AC variable, and the voltage magnitude of PCC bus is chosen as the common coordinated variable shared by above both.
The decoupling calculation process is summarized as follows: Firstly, the forward and backward equations of prediction and correction steps are derived with linear transformation, which represent the interaction between AC systems and DC systems. Secondly, all the other DC variables in the prediction equation and correction equation will be substituted by with corresponding forward equations, then the prediction equation and correction equation only contain AC variable x. Thirdly, the AC variables x at next operation point can be calculated by solving the simplified prediction equation and correction equation. Finally, the DC variables at next operation point can be obtained by the updated with the corresponding backward equations. This iterative calculation process will be continued until the saddle-node bifurcation point reaches. This decoupling algorithm preserves the precision and convergence of integrated CPF algorithms, and it can easily reflects the effects of the control mode changes of VSC stations to the VSM of AC systems.
4.1. The Forward and Backward Equations for the VSC-MTDC System
The main calculation steps of the CPF are prediction and correction [
31]. Firstly, for the prediction step, differential calculation is applied on both sides of the power flow constraint equation of VSC-MTDC, namely
D(•) in (15). Then the corresponding differential equation of DC system is:
where
;
,
,
and
are the tiny increment of
,
,
and
, respectively; and the
is the coefficient matrix of partial derivatives.
Apply the linear transformation to (18) and eliminate the coefficient matrix, then it can be obtained:
where the
,
and
are the submatrices of coefficient matrix in the prediction obtained by linear transformation. In this paper, the equation (19) is defined as the forward equation of prediction step while (20) is defined as the backward equation of prediction step.
Similarly, for the correction step, when the Taylor series is applied to
D(•), and the second and higher order items are ignored, the following correction equation can be derived:
where
,
,
and
are the deviations of the variables
,
,
and
, respectively.
Apply the linear transformation to (21) and eliminate the coefficient matrix of partial derivatives, namely
, then the following equation can be obtained:
where the
,
and
are the submatrices of coefficient matrix in the correction step obtained by linear transformation;
,
and
are the subvectors of the column vector obtained by linear transformation. In this paper, the Equation (22) is defined as the forward equation of correction step while (23) is defined as the backward equation of correction step.
Thus, the Equations (19), (20), (22) and (23) form the forward and backward equations for the VSC-MTDC system. Concretely, the constraint equations of DC variables and , namely (20) and (23), reflect the influence of the AC system on DC systems; the constraint equations of power injections into VSC stations and , namely (19) and (22), reflect the influence of the DC system on AC system.
4.2. Prediction Step
Once a basic solution has been found (for
), the next solution can be predicted by taking an appropriately sized step in a direction tangent to the solution path. Appling the Tangent method [
21] to the constraint equations of AC network in the proposed CPF model, namely the
f(•),
S(•) and
(•) in (15), then the prediction equation for AC network can be expressed as:
It should be emphasized here that
, as the coordinated variable between AC and DC systems, is part of the state vector
x. Substituting (19) to (24) yields:
where
,
,
,
and
are the simplified coefficient matrices of prediction step after the substitution. The detailed substitution process and expressions of above coefficient matrices are shown in the
Appendix A.
By solving (25), the tiny increment and can be calculated. Because is part of , the will be determined once the is determined. Substitute into (19) and (20), and then , and can also be obtained.
Then the prediction will be computed as:
where superscript
denotes the predicted solution at the present operation point, and superscript
demotes the corrected solution at the previous operation point.
refers is a scalar used to adjust the step size.
4.3. Correction Step
The predicted solution obtained by (26) will be regard as the initial value of the extended parameterized power flow equation (15). The Newton-Raphson algorithm is used for iterative calculation until convergence. Use the Taylor series to express the constraint equations of AC network in the proposed CPF model, namely the
f(•),
S(•) and
(•) in (15), and the second and higher order items are neglected. The corresponding correction equations can be described as follows:
Substituting (22) into (27) yields:
where
,
,
,
and
are the simplified coefficient matrices of correction after the substitution;
,
and
are the matrices of unbalanced quantities after the substitution. The detailed substitution process and expressions of above matrices are shown in the
Appendix B.
By solving (28), the increment and can be calculated. Because is part of , the will be determined once the is determined. Substitute into (22) and (23), and then , and can also be obtained. So far, the corrected deviations of all variables have been calculated.
Update the variables at the present operation point by:
where superscript
m denotes the calculated result after the iteration of correction calculation.
When every iteration is completed, the convergence criterion of Newton-Raphson algorithm is used to determine whether the correction calculation is completed or not. If it does not converge, the next iteration will continue. If it converges, the correction step at the present operation point is completed, and the prediction step at next operation point will begin.
Moreover, in this proposed decoupling algorithm, when the control modes of VSC stations change, only the forward and backward equations that represent the interaction between the AC system and DC system should be altered, and the prediction equation and correction equation of AC system are not required to be modified. Thus, the proposed algorithm can easily reflects the effects of the control mode changes of VSC stations to the VSM.
4.4. Step Control and Convergence Criterion of CPF
The variable step size algorithm in [
19] is adopted in this paper, and the convergence criterion of the proposed decoupling CPF algorithm is:
where
and
refer to the load growth factor calculated at the present operation point and the previous operation point, respectively.
4.5. The CPF Calculation Flow
Figure 3 below presents the calculation flow chart.
5. Case Studies
To illustrate the validity of the proposed CPF model, five simulation schemes are tested on the modified IEEE 2-area RTS-96 (MRTS) network [
34]. In comparison with the existing CPF models, the significant innovations of the proposed CPF model are as follows:
- (1)
Considers the BPTC in the electricity market;
- (2)
Simulates the security control behaviors for power allocation of tie-lines (a specific selection strategy for AGC units and a new generation re-dispatch strategy are proposed);
- (3)
Simulates the switching characteristic of reactive power control of the VSC station.
The influence of the aforementioned points on the static VSM and the power security of tie-lines are demonstrated successively through simulation and comparative analysis. Furthermore, for the solving algorithm, the high accuracy and convergence speed of the proposed decoupling CPF algorithm are also proved by comparing with the integrated CPF algorithms [
17,
21]. All programming are developed and implemented in MATLAB.
5.1. Test Data of MRTS System
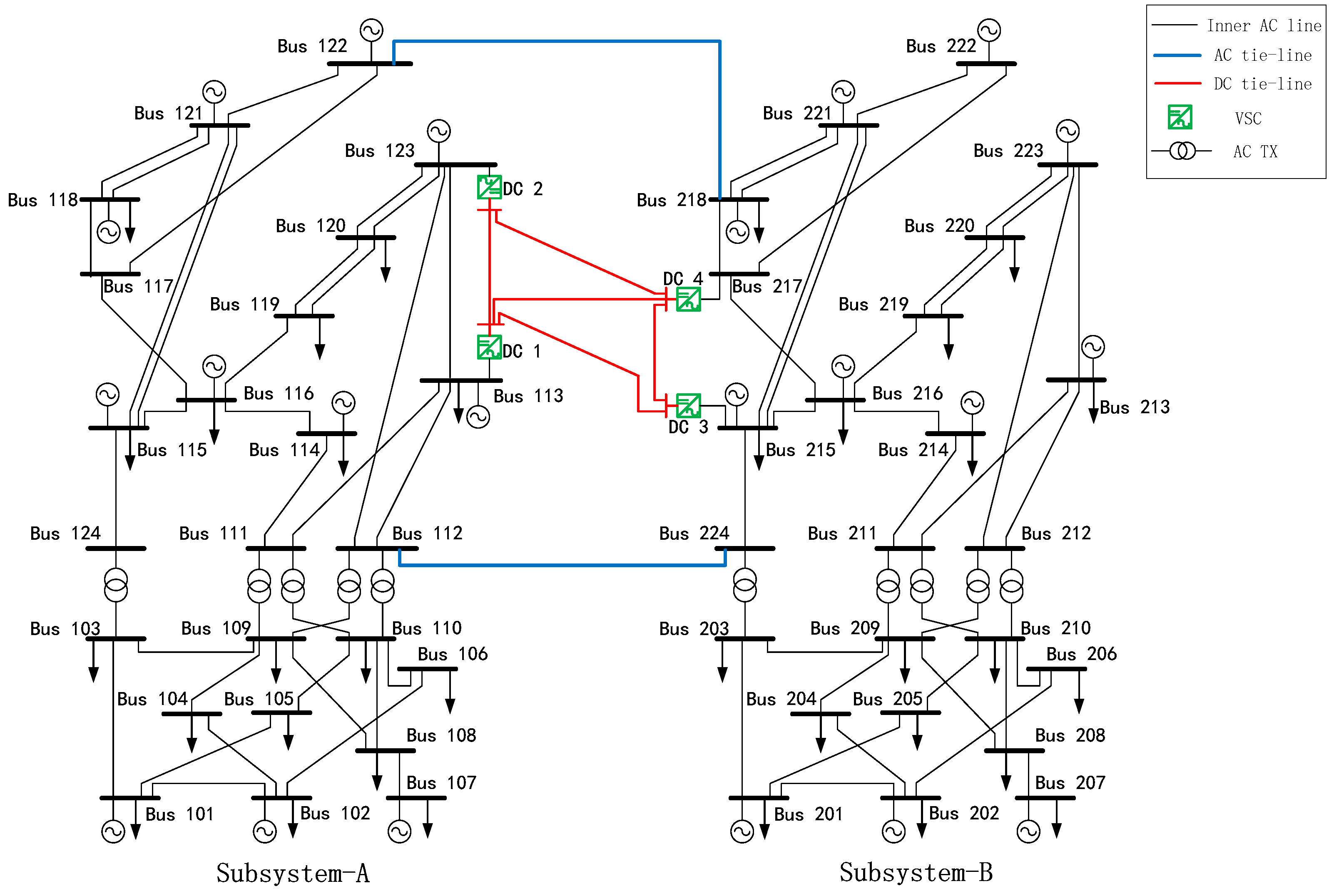
Figure 4 shows the modified single-line diagram of the MRTS network. On the basis of the original case data, the following modifications are made. In the 345 kV system, lines 113–215 and 123–217 are replaced by a 4-terminal 300 kV VSC-MTDC network, and two AC lines (122–218 and 112–224) are added as the AC tie-lines. In the 138 kV systems, line 107–203 is deleted. As shown in
Figure 4, the entire test system is divided into two subsystems, namely, subsystems-A and -B. Bus 115 is regarded as the slack bus of the interconnected systems, and bus 214 is the active power balanced bus in subsystem-B.c. The AC tie-lines 122–218 and 112–224 and the four-terminal VSC-MTDC network form the transmission interface between subsystems. The BPTC is assumed as follows. A 360 MW active power is required to transfer from subsystem-A to subsystem-B directionally via the transmission interface. According to the voltage level, the maximum active power transmitted via a single AC tie-line should be no more than the upper limit of 240 MW.
Table 1 shows the impedance information of AC tie-lines.
Table 2 presents the basic parameters, initial controlling modes, and the setting values of VSCs.
The sensitivity of active power transmitted via tie-lines to the active power output of generators
can be calculated with (16)–(17). The sorted result is shown in
Table 3.
In
Table 3, sensitivity
indicates that when the active power output of the generator increases by 1 MW, the active power transmitted via tie-line 112–224 will increase
MW and that transmitted via tie-line 122–218 will decrease
MW accordingly. The sensitivity result shows that the generator at bus 122 is the DIPA unit, which has a deep influence on the power allocation. When the switching strategy of VSC controlling modes is adopted, the
is set to 0.85 (p.u.).
5.2. The Influence of BPTC on VSM
The influence of BPTC on the VSM in the CPF calculation can be illustrated by comparing the simulation schemes M1 and M2. The control information of M1 and M2 are detailed as follows:
Scheme M1: The proposed CPF model in this study is applied. The nonlinear constraint equations of DTAP derived from the BPTC are considered. The security control behaviors for power allocation of tie-lines and the switch strategy of VSC controlling modes are also simulated in this scheme.
Scheme M2: All subsystems are simulated independently while ignoring the BPTC. The AC or DC tie-lines are assumed to be equivalent to the constant loads at the boundary buses of subsystems, and the equivalent loads can be calculated by the initial power flow. The controlling modes of VSCs are remained constant during load growth.
In the CPF, the critical load growth factor
, which refers to the ratio of maximum additional load increment to the initial load, is commonly used to characterize the VSM. The
and the maximum active power transmitted in AC tie-lines under different schemes are shown in
Table 4. Schemes M3, M4, and M5 are the comparative schemes used in the latter part of this study, and their control information will be discussed in detail.
The
in
Table 4 indicates that the critical load growth factor in scheme M1 is 1.3102, whereas that of scheme M2 is 1.0857, wherein the former is 1.21 times the latter. Hence, the VSM result will deviate far from the reality when the CPF model based on PQ equivalent method is applied.
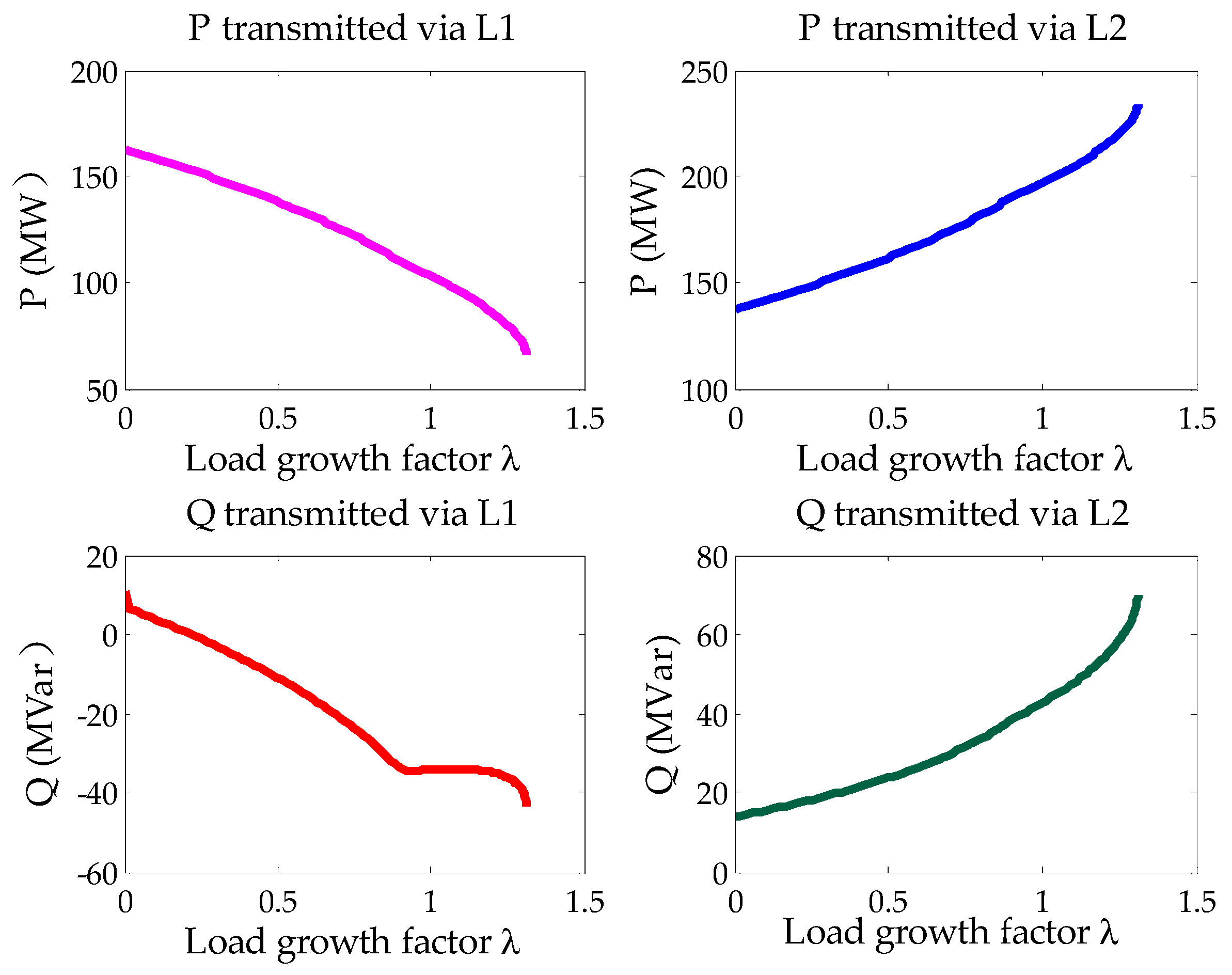
Figure 5 shows the curves of transmission power in AC tie-line L1 and L2 under scheme M1. L1 refers to line 112–224, whereas L2 refers to line 122–218. If the value of power is positive, then the power direction is from bus 112 to bus 224 or bus 122 to bus 218. As shown in
Figure 5, with the load growth, the active power transmitted in L1 will decrease from 163.09 MW to 65.90 MW, and the reactive power transmitted in L1 will reverse from 10.86 MVar to −43.35 MVar. Apparently, with the introduction of BPTC, the power allocation proportion of tie-lines will have a dramatic change. Thus, the VSM under scheme M1 distinctly differs from that under scheme M2.
5.3. The Influence of the Selection Strategy for AGC Units
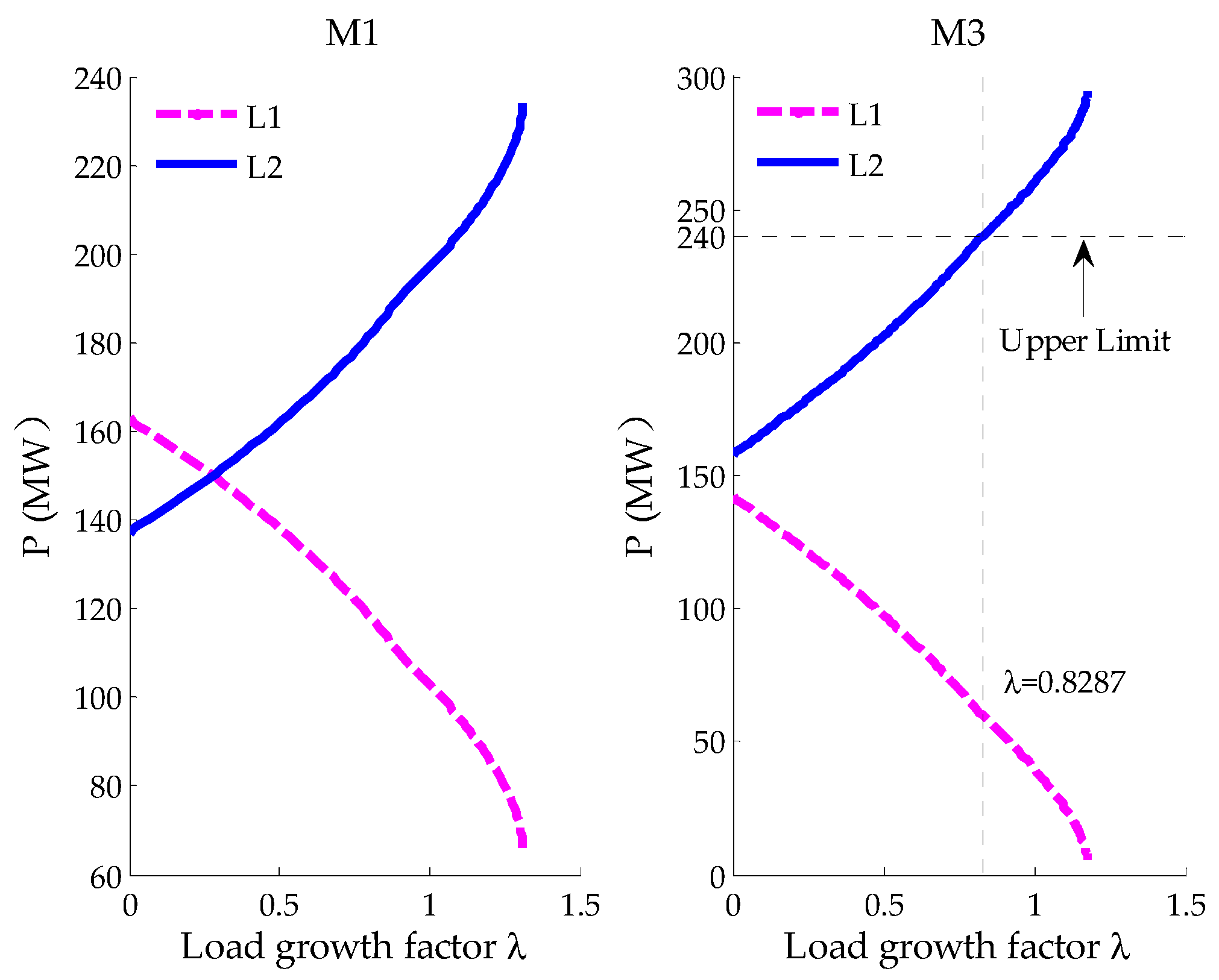
The influence of the proposed selection strategy for AGC units on the VSM and the power transfer security of tie-lines can be illustrated by comparing schemes M1 and M3. Scheme M1 has been previously described, and the control information of M3 is detailed as follows:
Scheme M3: This scheme is identical to scheme M1 in other aspects except for not simulating the selection strategy for AGC units, namely, Strategy-S1. Concretely, the DIPA unit (the generator at bus 122) is selected as an AGC unit. When the multi-balanced strategy is utilized to simulate the controlling behaviors of AGC units, bus 122 is also set as the slack bus.
Figure 6 shows the curves of transmission active power in AC tie-lines under schemes M1 and M3.
As shown in
Figure 6, the difference of active power transmitted in tie-lines L1 and L2 initially decrease and then increase later under scheme M1. Furthermore, the maximum active power transmitted in tie-lines does not exceed the security upper limit 240 MW. On the contrary, under scheme M3, the difference of active power transmitted in tie-lines increases continuously. When
λ reaches 0.8287, the active power transmitted in line L2 breaks through the security upper limit of 240 MW and continuously increase with the load growth. Therefore, in comparison with scheme M3, the active power allocation of tie-lines under scheme M1 is more balanced, and the requirement of security control for transmission active power in AC tie-lines is satisfied.
Table 4 shows that the
under scheme M1 is 1.3102, and that under scheme M3 is 1.1744, wherein the former is 1.12 times of the latter.
The above simulation results indicate the following analysis. In addition to load increment, the AGC units also balance the active power loss of the entire interconnected systems. If the DIPA units are selected as the AGC units, the active power outputs of these units will increase rapidly during load growth. Then, the power allocation of tie-lines will change considerably, and the transmission active power in several tie-lines will exceed the security upper limit. In this situation, the VSM of the interconnected systems will decrease.
5.4. The Influence of the Generation Re-Dispatch Strategy on VSM
The influence of the proposed generation re-dispatch strategy on the VSM and the power transfer security of tie-lines can be illustrated by comparing schemes M1 and M4. Scheme M1 has been previously described, and the control information of M4 is detailed as follows:
Scheme M4: This scheme is identical to scheme M1 in other aspects except for not simulating the generation re-dispatch strategy, namely, Strategy-S2. In other words, the DIPA unit can participate in the distribution of load increment.
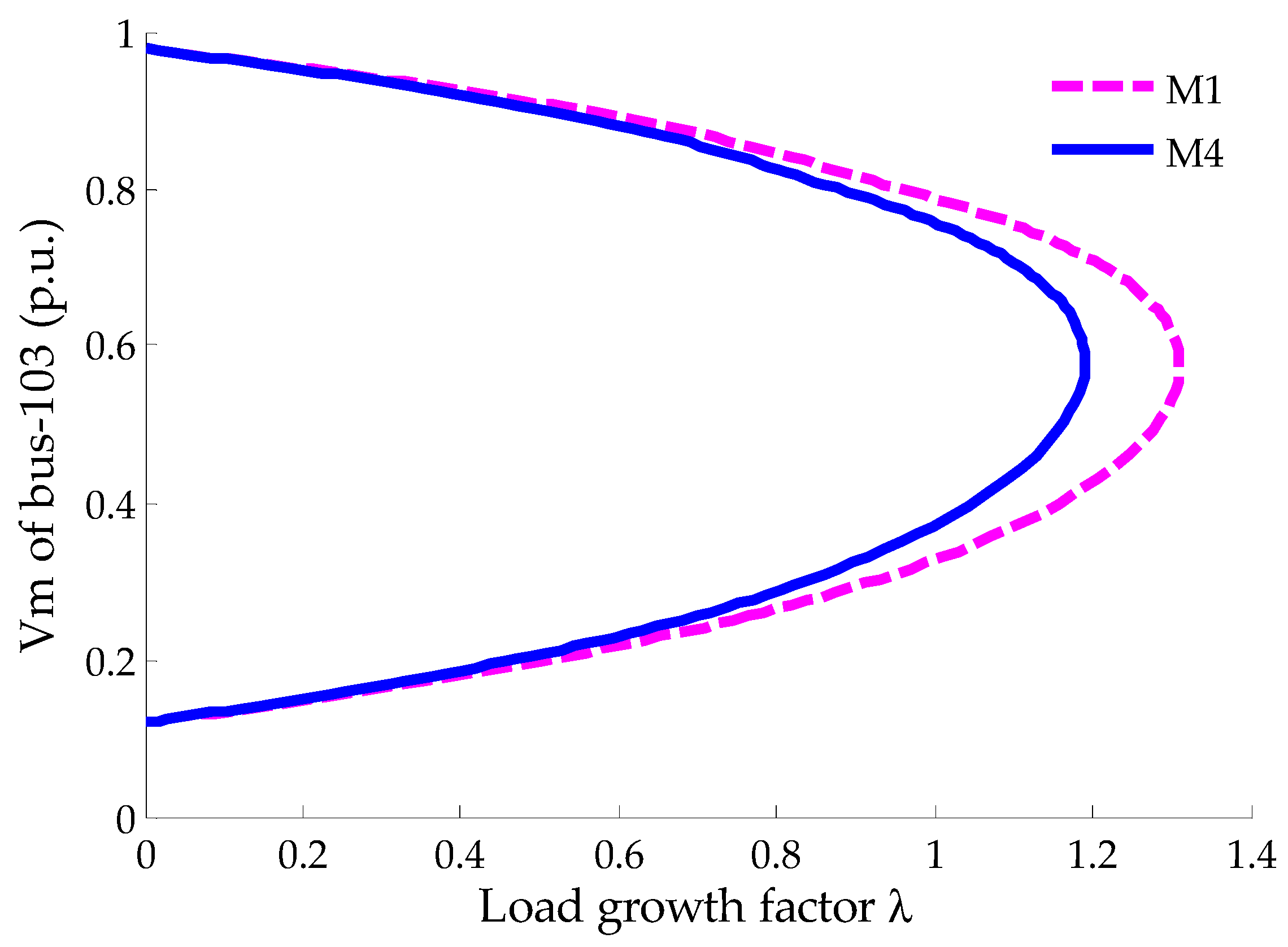
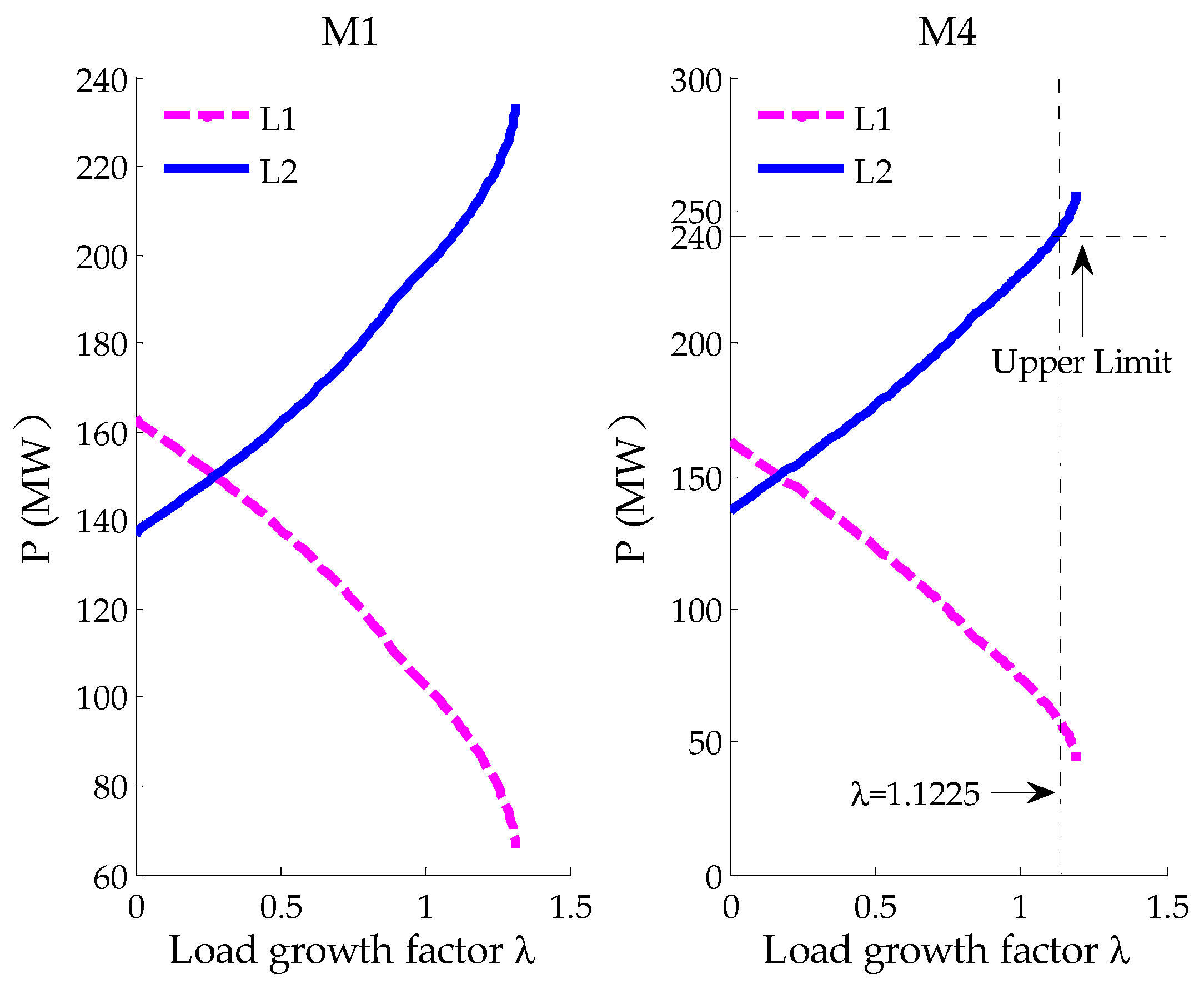
Figure 7 shows the
V–
curves of typical buses (e.g., bus 103) under schemes M1 and M4, and the
Figure 8 shows the curves of transmission active power in AC tie-lines under schemes M1 and M4.
The V–
curves in
Figure 7 show that the critical load growth factor of scheme M1 is larger than that of scheme M4. As shown in
Table 4, the
under scheme M1 is 1.3102 and that under scheme M4 is 1.1907. These results demonstrate that the VSM of the interconnected systems will be improved when the Strategy-S2 is applied. In comparison with scheme M1, the active power allocation of AC tie-lines under scheme M4 is relatively more concentrated (
Figure 8). When
reaches 1.1225, the transmission active power in L2 exceeds the security upper limit of 240 MW under scheme M4. Thus, the VSM of scheme M4 is lower than that of scheme M1.
5.5. The Influence of Simulating the Switching Strategy for Reactive Power Control of VSC Stations
The influence of the proposed switching strategy for VSC controlling modes on the VSM can be illustrated by comparing scheme M1 and M5. Scheme M1 has been previously described, and the control information of M5 is detailed as follows:
Scheme M5: On the basis of scheme M1, the switching strategy of VSC controlling modes is not simulated.
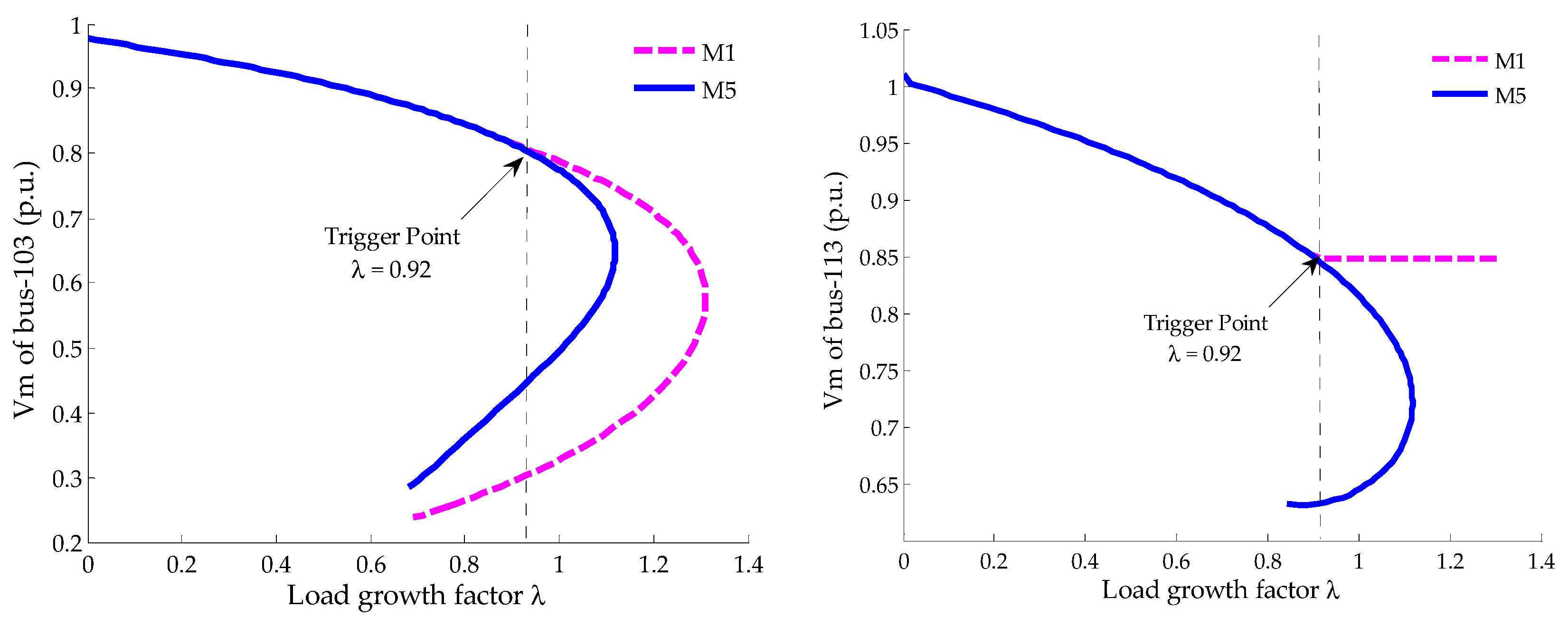
Figure 9 shows the
V–
curves under schemes M1 and M5, where bus 103 represents the common voltage weak buses and bus 113 refers to the PCC bus.
Under scheme M1, when
reaches 0.92, the voltage magnitude of bus 113 is below the threshold value
0.85. Then, the switching strategy of VSC controlling modes is activated. The controlling mode of VSC 1 switches from Mode 1) to Mode 2), and the voltage magnitude of bus 113 is prevented from continuing to decrease. The PCC buses are the key buses in the AC/DC interconnected systems. The VSM of the entire system can be improved when the voltage stability of PCC buses is guaranteed. As shown in
Figure 9, even the common voltage weak buses can bear more load increment under Scheme M1. The simulation results in
Table 4 imply that the critical load growth factor of scheme M1 is 1.3102 and that of Scheme M5 is 1.1179. Therefore, the VSM of interconnected systems is improved by 17.2% after adopting the switching strategy of VSC controlling modes.
5.6. Comparisons and Analysis of the Proposed Decoupling CPF Algorithm and the Integrated Algorithms
The computational accuracy and calculation speed of the proposed decoupling CPF algorithm can be illustrated by comparing with the integrated CPF algorithms in [
17] and [
21]. Reference [
21] firstly proposed the CPF algorithm for AC systems, and all subsequent studies about CPF were its expansions and improvements. As one comparison, the prediction-correction calculation process of this algorithm will be applied to solve the CPF model for M-AC/VSC-MTDC interconnected systems in a centralized way. Reference [
17] proposed a CPF algorithm for a hybrid AC/DC system with two-terminal VSC-HVDC, the main calculation of which is composed of an integrated prediction calculation and a distributed power flow calculation. As the other comparison, this algorithm will be extended to multi-terminal DC network. For the fairness of the result comparison, the arc-length parameterization will be adopted in all these three algorithms. To express these three algorithms conveniently, the proposed decoupling CPF algorithm, the integrated CPF algorithm in [
17] and the integrated CPF algorithm in [
21] are defined as DCA, ICA−I and ICA−II, respectively.
Table 5 shows the calculated critical load growth factor
, the steps of prediction-correction, the numbers of iterations and the total calculation time of the proposed decoupling algorithm and the integrated algorithms under Scheme M1.
Firstly, the computational accuracy of these three algorithms is compared and analyzed. By observing the simulation results in
Table 5, the
calculated by these three CPF algorithms are very close, which all are around 1.31. Furthermore, the steps of prediction-correction required to increase initial load to the maximum in these three algorithms are the same. These results demonstrate that the proposed decoupling CPF algorithm has very high computational accuracy, and it is highly consistent with the integrated algorithms not only in the ultimate result, but also in the intermediate process. Theoretically, the forward and backward equations derived in the proposed decoupling algorithm are based on the strictly equivalent linear transformation, therefore its calculation accuracy is completely equivalent to the integrated calculation.
Then the calculation speeds of these three algorithms are compared and discussed. The total calculation time of the proposed decoupling CPF algorithm, ICA−I and ICA−II are 4.8562, 6.4755 and 7.5068 seconds, respectively. In addition, the numbers of iterations of these three algorithms are 417, 752 and 417, respectively. Obviously, the proposed decoupling CPF algorithm has an apparent advantage on the calculation speed by comparing with the other two integrated algorithms. With the bi-directional iteration, the proposed decoupling CPF algorithm simplifies the hybrid AC/DC prediction equation and correction equation, eliminates 6/7 DC variables and only retains the variable . This algorithm reduces the dimensions of calculation equations in each prediction-correction step and improves the calculation speed.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}