Implementation and Assessment of a Model-Based Controller of Torque and Nitrogen Oxide Emissions in an 11 L Heavy-Duty Diesel Engine





Abstract
1. Introduction
- -
- The direct optimization of the control strategy for the main powertrain components (e.g., engine, transmission), in order to maximize their performance.
- -
- The development of a model-based global powertrain energy manager supervisor, which optimizes the utilization of the different energy sources depending on the current driving situation.
- -
- The implementation and use of “look-ahead” systems, such as eHorizon, in order to realize long-term optimization strategies.
2. Experimental Setup and Engine Conditions
- Case 1: All the input variables were derived from test bench sensors (best case).
- Case 2: The available ECU (Engine Control Unit) variables were used as model inputs, except for the intake O2 concentration, which was obtained from test bench sensors.
- Case 3: Only the available ECU variables were used as model inputs.
- Selected steady-state points on the engine map (Figure 1). These tests were used to perform a preliminary check of the controller functionality when implemented in the engine through rapid prototyping. In particular, for these tests, targets of BMEP and NOx for the controller were set according to the baseline engine map. The steady-state points were chosen in order to explore a wide range of the engine map, but keeping at the same time a safety margin from the full-load curve.
- Load ramp tests carried out at several engine speed conditions, with and without EGR, in which the controller was activated or deactivated. The EGR valve position was controlled in the engine to realize the nominal EGR levels according to a look-up table. For a given ramp test, different NOx targets (nominal, ±20%, −40%) were set when the controller was activated, in order to fully assess its functionality. The summary of the ramp tests is reported in Table 1, while Figure 2 reports the time histories of the accelerator pedal position for the ramp tests carried out under baseline engine operating conditions (i.e., without controller active). As can be seen, two types of load ramp tests were considered, i.e., variations from 0% to 60%–70% of maximum load with intermediate steps, and variations from 0% to 60% of maximum load with different ramp durations.
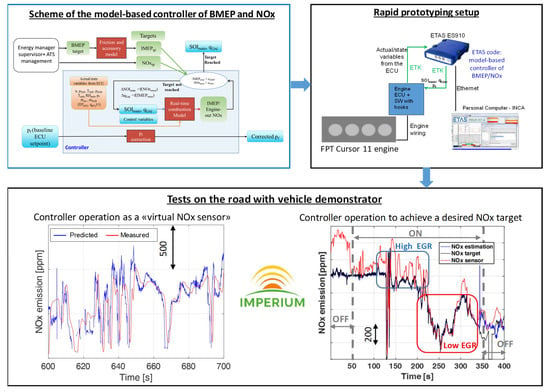
3. Description of the Model-Based Controller of BMEP and NOx
- Net energy of the charge (Qnet): It is calculated as the difference between the released chemical energy and the heat exchanged by the charge with the walls.
- In-cylinder pressure: A single-zone thermodynamic model [29] is applied, in which the net energy of the charge is used as input in order to calculate the in-cylinder pressure during the combustion phase. The in-cylinder pressure during the compression and expansion phases is obtained assuming polytropic processes. The PFP (peak firing pressure) and IMEPg (gross indicated mean effective pressure) metrics are then evaluated on the basis of the in-cylinder pressure [25].
- Pumping and friction losses: A pumping model, which is based on the intake and exhaust manifold pressure levels, is used to estimate PMEP (pumping mean effective pressure), while FMEP (friction mean effective pressure) is evaluated by adopting the Chen–Flynn model [30]. The evaluation of PMEP and FMEP allows IMEPn (net indicated mean effective pressure) and BMEP (brake mean effective pressure) to be estimated.
- Engine-out NOx emissions: The approach described in [13,31] was adopted. In particular, NOx emissions are estimated as the sum of two terms, i.e., the nominal NOx level, which is emitted by the engine when it operates with the baseline calibration map, and a NOx deviation term. The latter term is a function of the deviations of the intake oxygen concentration (δO2) and MFB50 (δMFB50) with respect to the values that occur with the baseline engine calibration map.
- the adoption of upper/lower saturation for all the input quantities;
- the adoption of upper/lower saturation of SOImain and qf,inj, in order to avoid the exceeding of the peak firing pressure and exhaust gas temperature limits, as well as to avoid excessive penalizations in terms of BSFC;
- the adoption of an output buffer for SOImain and qf,inj, in order to remove high frequency oscillations deriving from input variable noise.
4. Results and Discussion
4.1. Real-Time Combustion Model
4.2. Controller of BMEP and NOx: Assessment at Steady-State Operation
4.3. Controller of BMEP and NOx, Assessment in Transient Operation: NOx Control
- Engine operation with controller enabled and nominal NOx target (blue lines).
- Engine operation with controller enabled and NOx target increased of 20% with respect to the nominal one (magenta lines).
- Engine operation with controller enabled and NOx target decreased of 20% with respect to the nominal one (green lines).
- Engine operation with controller enabled and NOx target decreased of 40% with respect to the nominal one (black lines).
4.4. Controller of BMEP and NOx, Assessment in Transient Operation: BMEP Control
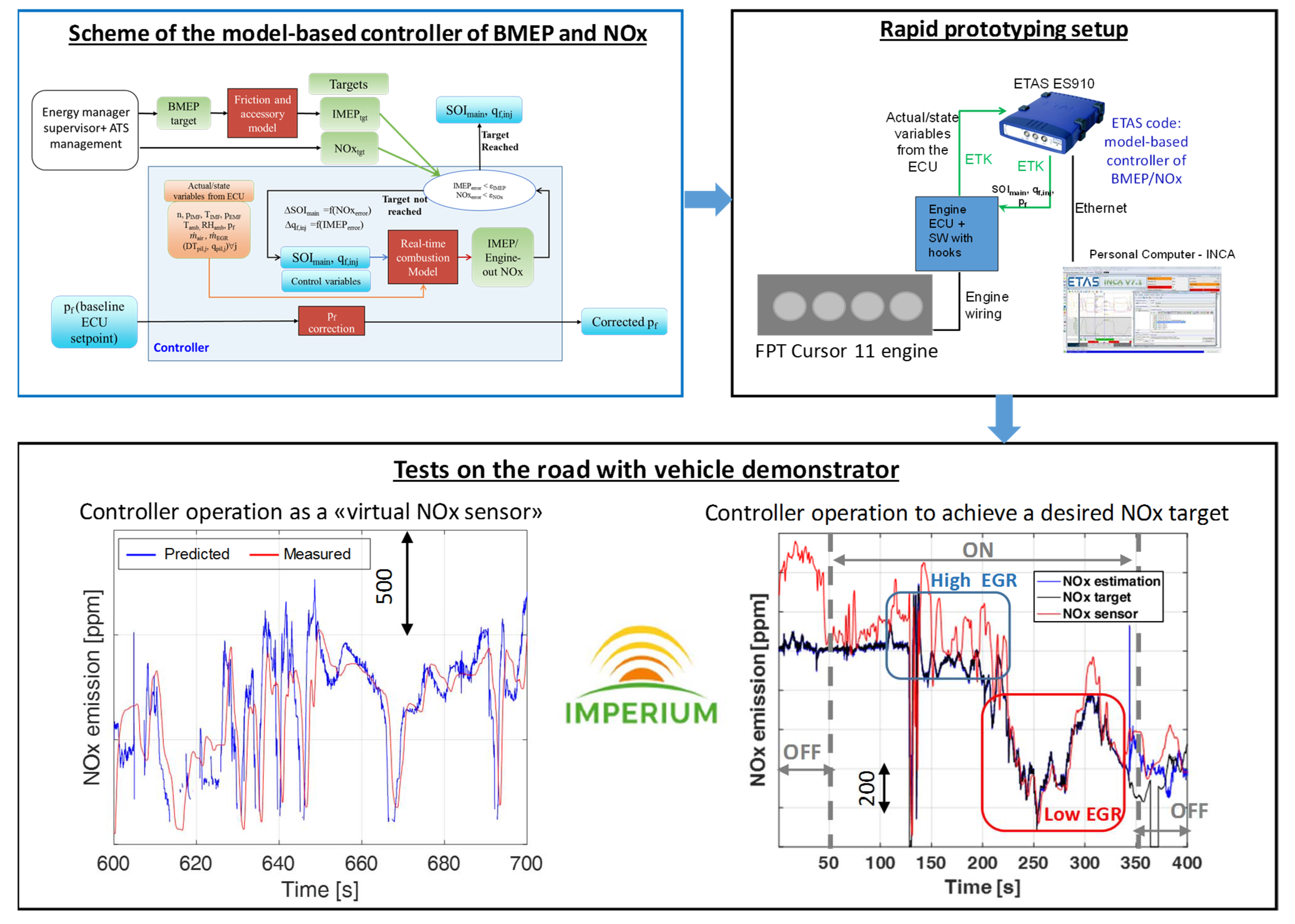
4.5. Preliminary Tests on the Road: NOx Control
5. Conclusions
- Concerning the steady-state tests acquired at the engine test bench, the average values of the root mean square error (RMSE) are of the order of 100 ppm with reference to the control of NOx emissions, and of the order of 0.3 bar with reference to the control of BMEP. The root mean square error of the relative NOx error is of the order of 7.8%.
- Concerning the transient tests acquired at the engine test bench, it was found that the control of BMEP is very accurate for all the investigated tests. With reference to the control of NOx emissions, it was verified that the cumulative NOx emissions are in line with the target levels when different NOx targets are set, and this confirms the effectiveness of the proposed approach.
- By analyzing the data acquired at the engine test bench, it was verified that if a too low or too high target of NOx emissions is requested, the limitation in the actuated value of SOImain is realized correctly. This limitation is designed for safety reasons (e.g., in order to avoid too high exhaust temperatures/peak firing pressure levels, or to avoid an excessive penalization in terms of engine thermal efficiency), so that the target cannot be achieved but the engine integrity is guaranteed.
- Concerning the road tests, the basic functionality of the controller and the NOx control accuracy observed at the engine test bench were confirmed. It was also verified that, when the EGR valve tends to be closed, the accuracy in the instantaneous control of NOx emissions is very high, while it deteriorates when the EGR valve is activated. This deviation is likely to be due to inaccuracies in the estimation of the intake oxygen concentration on the basis of the air-path models of EGR and air mass embedded in the ECU.
- The installation of an intake O2 sensor may lead to a significant improvement in the performance of the controller, concerning the instantaneous control of NOx emissions, when EGR is adopted.
- During the on-road tests, it was verified that the controller could be used as an accurate virtual NOx sensor even when it was disabled over specific engine modes. This functionality can be very useful, especially in case the engine NOx sensor has not yet achieved warm-up conditions and cannot provide reliable measurements.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ATS | after-treatment system |
| BMEP | Brake Mean Effective Pressure (bar) |
| CA | crank angle (deg) |
| DT | dwell-time |
| ECU | Engine Control Unit |
| EGR | Exhaust Gas Recirculation |
| FMEP | Friction Mean Effective Pressure (bar) |
| FPT | FPT Industrial |
| HCCI | Homogeneous Charge Compression Ignition |
| IMEP | Indicated Mean Effective Pressure (bar) |
| IMEPg | gross Indicated Mean Effective Pressure (bar) |
| IMEPn | net Indicated Mean Effective Pressure (bar) |
| IMPERIUM | IMplementation of Powertrain Control for Economic and Clean Real driving emIssion and fuel ConsUMption |
| m | mass |
| mass flow rate of fresh air | |
| mass flow rate of EGR | |
| MFB50 | crank angle at which 50% of the fuel mass fraction has burned (deg) |
| N | engine rotational speed (1/min) |
| O2 | intake charge oxygen concentration (%) |
| p | pressure (bar) |
| PCCI | Premixed Charge Compression Ignition |
| pEMF | exhaust manifold pressure (bar abs) |
| PEMS | Portable Emissions Measurement System |
| pf | injection pressure (bar) |
| PFP | peak firing pressure |
| pIMF | intake manifold pressure (bar abs) |
| PMEP | Pumping Mean Effective Pressure (bar) |
| q | injected fuel volume quantity (mm3) |
| Qch | chemical heat release |
| qf,inj | total injected fuel volume quantity per cycle/cylinder |
| Qnet | net heat release |
| Rhamb | ambient relative humidity |
| RMSE | root mean square error |
| SOI | electric start of injection |
| SOImain | electric start of injection of the main pulse |
| t | time |
| T | temperature (K) |
| Tamb | ambient temperature |
| TIMF | intake manifold temperature |
| V2X | vehicle-to-everything technology |
| VGT | Variable Geometry Turbine |
| VPM | Virtual Pressure Model |
| WHSC | Worldwide Harmonized Steady Cycle |
| WHTC | Worldwide Harmonized Transient Cycle |
References
- Xue, X.; Rutledge, J. Potentials of Electrical Assist and Variable Geometry Turbocharging System for Heavy-Duty Diesel Engine Downsizing; SAE Technical Paper 2017-01-1035; SAE International: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Di Iorio, S.; Beatrice, C.; Guido, C.; Napolitano, P.; Vassallo, A.; Ciaravino, C. Impact of Biodiesel on Particle Emissions and DPF Regeneration Management in a Euro5 Automotive Diesel Engine; SAE Technical Paper 2012-01-0839; SAE International: Warrendale, PA, USA, 2012. [Google Scholar] [CrossRef]
- D’Ambrosio, S.; Gaia, F.; Iemmolo, D.; Mancarella, A.; Salamone, N.; Vitolo, R.; Hardy, G. Performance and Emission Comparison between a Conventional Euro VI Diesel Engine and an Optimized PCCI Version and Effect of EGR Cooler Fouling on PCCI Combustion; SAE Technical Paper 2018-01-0221; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Andert, J.; Wick, M.; Lehrheuer, B.; Sohn, C.; Albin, T.; Pischinger, S. Autoregressive modeling of cycle-to-cycle correlations in homogeneous charge compression ignition combustion. Int. J. Engine Res. 2017, 19, 790–802. [Google Scholar] [CrossRef]
- Ferrari, A.; Mittica, A.; Pizzo, P.; Jin, Z. PID Controller Modelling and Optimization in Cr Systems with Standard and Reduced Accumulators. Int. J. Automot. Technol. 2018, 19, 771–781. [Google Scholar] [CrossRef]
- Catania, A.E.; Ferrari, A.; Mittica, A.; Spessa, E. Common Rail without Accumulator: Development, Theoretical-Experimental Analysis and Performance Enhancement at DI-HCCI Level of a New Generation FIS; SAE Technical Paper 2007-01-1258; SAE International: Warrendale, PA, USA, 2007. [Google Scholar] [CrossRef]
- Ferrari, A.; Mittica, A.; Pizzo, P.; Wu, X.; Zhou, H. New methodology for the identification of the leakage paths and guidelines for the design of common rail injectors with reduced leakage. J. Eng. Gas Turbines Power 2018, 140, 022801. [Google Scholar] [CrossRef]
- Ferrari, A.; Mittica, A.; Paolicelli, F.; Pizzo, P. Hydraulic Characterization of Solenoid-actuated Injectors for Diesel Engine Common Rail Systems. Energy Procedia 2016, 101, 878–885. [Google Scholar] [CrossRef]
- Ferrari, A.; Manno, M.; Mittica, A. Cavitation analogy to gasdynamic shocks: Model conservativeness effects on the simulation of transient flows in high-pressure pipelines. J. Fluids Eng. 2008, 130, 031304. [Google Scholar] [CrossRef]
- Catania, A.; Ferrari, A.; Mittica, A. High-pressure rotary pump performance in multi-jet common rail systems. ESDA2006, Engineering Systems Design and Analysis, Fatigue and Fracture, Heat Transfer, Internal Combustion Engines, Manufacturing and Technology and Society. In Proceedings of the 8th Biennial ASME Conference on Engineering Systems Design and Analysis, Torino, Italy, 4–7 July 2006; Volume 4, pp. 557–565. [Google Scholar] [CrossRef]
- Finesso, R.; Marello, O.; Misul, D.; Spessa, E.; Violante, M.; Yang, Y.; Hardy, G.; Maier, C. Development and Assessment of Pressure-Based and Model-Based Techniques for the MFB50 Control of a Euro VI 3.0L Diesel Engine. SAE Int. J. Engines 2017, 10, 1538–1555. [Google Scholar] [CrossRef]
- Finesso, R.; Marello, O.; Spessa, E.; Yang, Y.; Hardy, G. Model-Based Control of BMEP and NOx Emissions in a Euro VI 3.0L Diesel Engine. SAE Int. J. Engines 2017, 10, 2288–2304. [Google Scholar] [CrossRef]
- Finesso, R.; Hardy, G.; Mancarella, A.; Marello, O.; Mittica, A.; Spessa, E. Real-Time Simulation of Torque and Nitrogen Oxide Emissions in an 11.0 L Heavy-Duty Diesel Engine for Model-Based Combustion Control. Energies 2019, 12, 460. [Google Scholar] [CrossRef]
- Hu, S.; d’Ambrosio, S.; Finesso, R.; Manelli, A.; Marzano, M.R.; Mittica, A.; Ventura, L.; Wang, H.; Wang, Y. Comparison of Physics-Based, Semi-Empirical and Neural Network-Based Models for Model-Based Combustion Control in a 3.0 L Diesel Engine. Energies 2019, 12, 3423. [Google Scholar] [CrossRef]
- Nuss, E.; Wick, M.; Andert, J.; De Schutter, J.; Diehl, M.; Abel, D.; Albin, T. Nonlinear model predictive control of a discrete-cycle gasoline-controlled auto ignition engine model: Simulative analysis. Int. J. Engine Res. 2019, 20, 1025–1036. [Google Scholar] [CrossRef]
- Meda, L.; Shu, Y.; Romzek, M. Heavy Duty Diesel After-Treatment System Analysis Based Design: Fluid, Thermal and Structural Considerations; SAE Technical Paper 2009-01-0624; SAE International: Warrendale, PA, USA, 2009. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Aoyagi, Y.; Uchida, N.; Fukunaga, A.; Kobayashi, M.; Adachi, T.; Hashimoto, M. Fundamental Study of Waste Heat Recovery in the High Boosted 6-cylinder Heavy Duty Diesel Engine. SAE Int. J. Mater. Manf. 2015, 8, 209–226. [Google Scholar] [CrossRef]
- Delogu, M.; Zanchi, L.; Dattilo, C.; Maltese, S.; Riccomagno, R.; Pierini, M. Take-Home Messages from the Applications of Life Cycle Assessment on Lightweight Automotive Components; SAE Technical Paper 2018-37-0029; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Finesso, R.; Misul, D.; Spessa, E.; Venditti, M. Optimal Design of Power-Split HEVs Based on Total Cost of Ownership and CO2 Emission Minimization. Energies 2018, 11, 1705. [Google Scholar] [CrossRef]
- Talavera, E.; Díaz-Álvarez, A.; Jiménez, F.; Naranjo, J.E. Impact on Congestion and Fuel Consumption of a Cooperative Adaptive Cruise Control System with Lane-Level Position Estimation. Energies 2018, 11, 194. [Google Scholar] [CrossRef]
- Johansson, I.; Jin, J.; Ma, X.; Pettersson, H. Look-ahead speed planning for heavy-duty vehicle platoons using traffic information. Transp. Res. Procedia 2017, 22, 561–569. [Google Scholar] [CrossRef]
- Danninger, A.; Armengauda, E.; Milton, G.; Lützner, J.; Hakstege, B.; Zurlo, G.; Schöni, A.; Lindberg, J.; Krainer, F. IMplementation of Powertrain Control for Economic and Clean Real driving emIssion and fuel ConsUMption. In Proceedings of the 7th Transport Research Arena TRA 2018, Vienna, Austria, 16–19 April 2018. [Google Scholar]
- Finesso, R.; Spessa, E.; Yang, Y.; Alfieri, V.; Conte, G. HRR and MFB50 Estimation in a Euro 6 Diesel Engine by Means of Control-Oriented Predictive Models. SAE Int. J. Engines 2015, 8, 1055–1068. [Google Scholar] [CrossRef]
- Finesso, R.; Spessa, E.; Yang, Y. Development and Validation of a Real-Time Model for the Simulation of the Heat Release Rate, In-Cylinder Pressure and Pollutant Emissions in Diesel Engines. SAE Int. J. Engines 2016, 9, 322–341. [Google Scholar] [CrossRef]
- Catania, A.E.; Finesso, R.; Spessa, E. Predictive zero-dimensional combustion model for DI diesel engine feed-forward control. Energy Convers. Manag. 2011, 52, 3159–3175. [Google Scholar] [CrossRef]
- Orthaber, G.C.; Chmela, F.G. Rate of Heat Release Prediction for Direct Injection Diesel Engines Based on Purely Mixing Controlled Combustion; SAE Technical Paper 1999-01-0186; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Egnell, R. A Simple Approach to Studying the Relation between Fuel Rate Heat Release Rate and NO Formation in Diesel Engines; SAE Technical Paper 1999-01-3548; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Ericson, C.; Westerberg, B. Modelling Diesel Engine Combustion and NOx Formation for Model Based Control and Simulation of Engine and Exhaust Aftertreatment Systems; SAE Technical Paper 2006-01-0687; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Heywood, J. Internal Combustion Engine Fundamentals; McGraw-Hill Intern: Columbus, OH, USA, 1988. [Google Scholar]
- Chen, S.K.; Flynn, P.F. Development of a Single Cylinder Compression Ignition Research Engine; SAE Technical SAE Technical Paper 650733; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Finesso, R.; Hardy, G.; Maino, C.; Marello, O.; Spessa, E. A New Control-Oriented Semi-Empirical Approach to Predict Engine-Out NOx Emissions in a Euro VI 3.0 L Diesel Engine. Energies 2017, 10, 1978. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ramp Test | Engine Speed | Load (Accelerator Pedal Position) | EGR | Controller Activation | NOx Target When Controller ON |
|---|---|---|---|---|---|
| Ramp test 1 | N = 800 rpm | 0%–60% with intermediate steps | ON/OFF | ON/OFF | Nominal/+20% − 20%/−40% |
| Ramp test 2 | N = 1300 rpm | 0%–60% with intermediate steps | ON/OFF | ON/OFF | Nominal/+20% − 20%/−40% |
| Ramp test 3 | N = 1900 rpm | 0%–60% with intermediate steps | ON/OFF | ON/OFF | Nominal/+20% − 20%/−40% |
| Ramp test 4 | N = 1100 rpm | 0%–60% with different ramp durations | ON/OFF | ON/OFF | Nominal/+20% − 20%/−40% |
| Ramp test 5 | N = 1500 rpm | 0%–60% with different ramp durations | ON/OFF | ON/OFF | Nominal/+20% − 20%/−40% |
| Input Type | RMSE NOx | RMSE BMEP |
|---|---|---|
| Test bench sensors | 80 ppm | 0.28 bar |
| Engine sensors except for intake O2 | 80 ppm | 0.32 bar |
| Engine sensors | 111 ppm | 0.32 bar |
| Input Type | Controller ON, Nominal NOx Target | Controller ON, NOx Target +20% | Controller ON, NOx Target −20% | Controller ON, NOx Target −40% |
|---|---|---|---|---|
| Ramp test 1, EGR OFF | Reference | +17.44 | −15.77 | −26.62 |
| Ramp test 1, EGR ON | Reference | +13.29% | −19.48% | −30.53% |
| Ramp test 2, EGR OFF | Reference | +21.33% | −16.26 | −24.25% |
| Ramp test 2, EGR ON | Reference | +13.28% | −21.31% | −31.83% |
| Ramp test 3, EGR OFF | Reference | +21.17% | −18.86% | −28.24% |
| Ramp test 3, EGR ON | Reference | +19.85% | −22.71% | −35.81% |
| Ramp test 4, EGR OFF | Reference | +18.99% | −17.89% | −26.41% |
| Ramp test 4, EGR ON | Reference | +14.03 | −14.56% | −28.35% |
| Ramp test 5, EGR OFF | Reference | +20.44% | −18.51% | −25.44% |
| Ramp test 5, EGR ON | Reference | +16.39% | −22.07% | −33.62% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cococcetta, F.; Finesso, R.; Hardy, G.; Marello, O.; Spessa, E. Implementation and Assessment of a Model-Based Controller of Torque and Nitrogen Oxide Emissions in an 11 L Heavy-Duty Diesel Engine. Energies 2019, 12, 4704. https://doi.org/10.3390/en12244704
Cococcetta F, Finesso R, Hardy G, Marello O, Spessa E. Implementation and Assessment of a Model-Based Controller of Torque and Nitrogen Oxide Emissions in an 11 L Heavy-Duty Diesel Engine. Energies. 2019; 12(24):4704. https://doi.org/10.3390/en12244704
Chicago/Turabian StyleCococcetta, Fabio, Roberto Finesso, Gilles Hardy, Omar Marello, and Ezio Spessa. 2019. "Implementation and Assessment of a Model-Based Controller of Torque and Nitrogen Oxide Emissions in an 11 L Heavy-Duty Diesel Engine" Energies 12, no. 24: 4704. https://doi.org/10.3390/en12244704
APA StyleCococcetta, F., Finesso, R., Hardy, G., Marello, O., & Spessa, E. (2019). Implementation and Assessment of a Model-Based Controller of Torque and Nitrogen Oxide Emissions in an 11 L Heavy-Duty Diesel Engine. Energies, 12(24), 4704. https://doi.org/10.3390/en12244704