State-of-Health Estimation of Li-ion Batteries in Electric Vehicle Using IndRNN under Variable Load Condition

Abstract
:1. Introduction
- A new approach is adopted to identify and extract a set of input features associated with the battery degradation process;
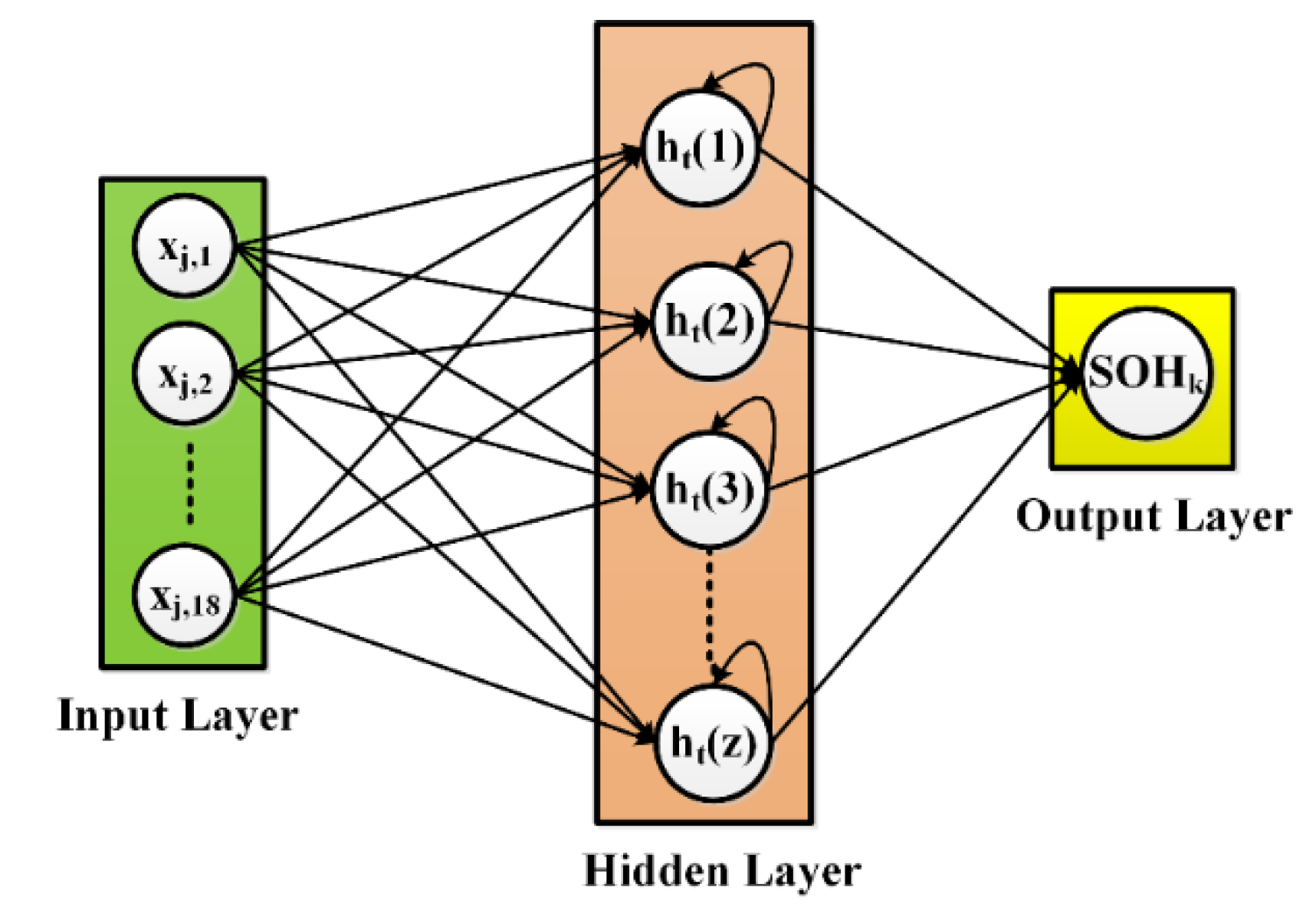
- A data-driven based SOH estimation using an independently recurrent neural network (IndRNN) is developed with the help of vital battery parameters collected from LIBs;
- The effectiveness of the proposed IndRNN based SOH estimation approach is verified by comparing it with similar RNN architectures, and the IndRNN resulted in having a much lower mean square error (RMSE) rate of 1.33%.
2. Related Work
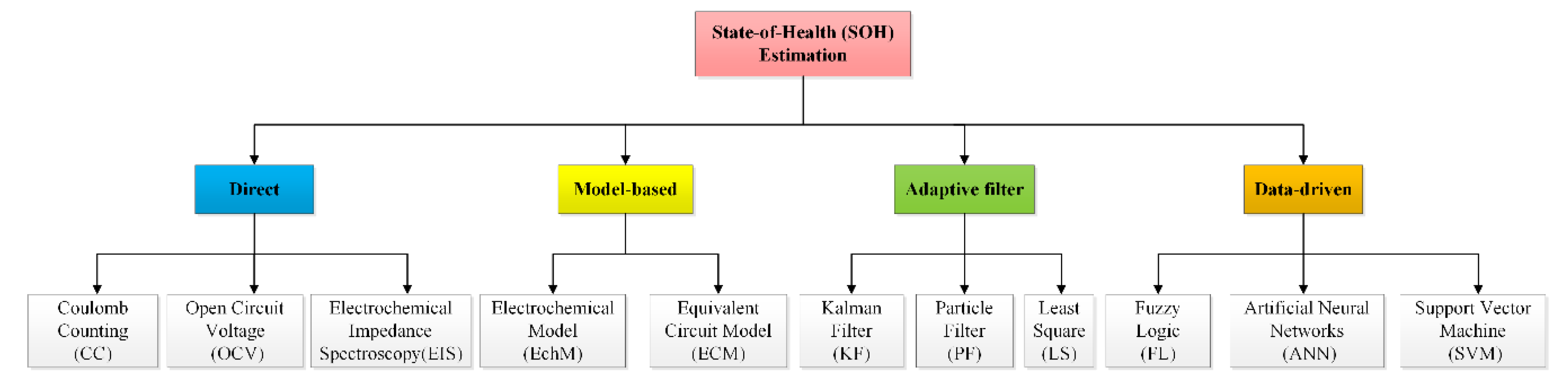
Data-Driven Approach for State-of-Health (SOH) Estimation
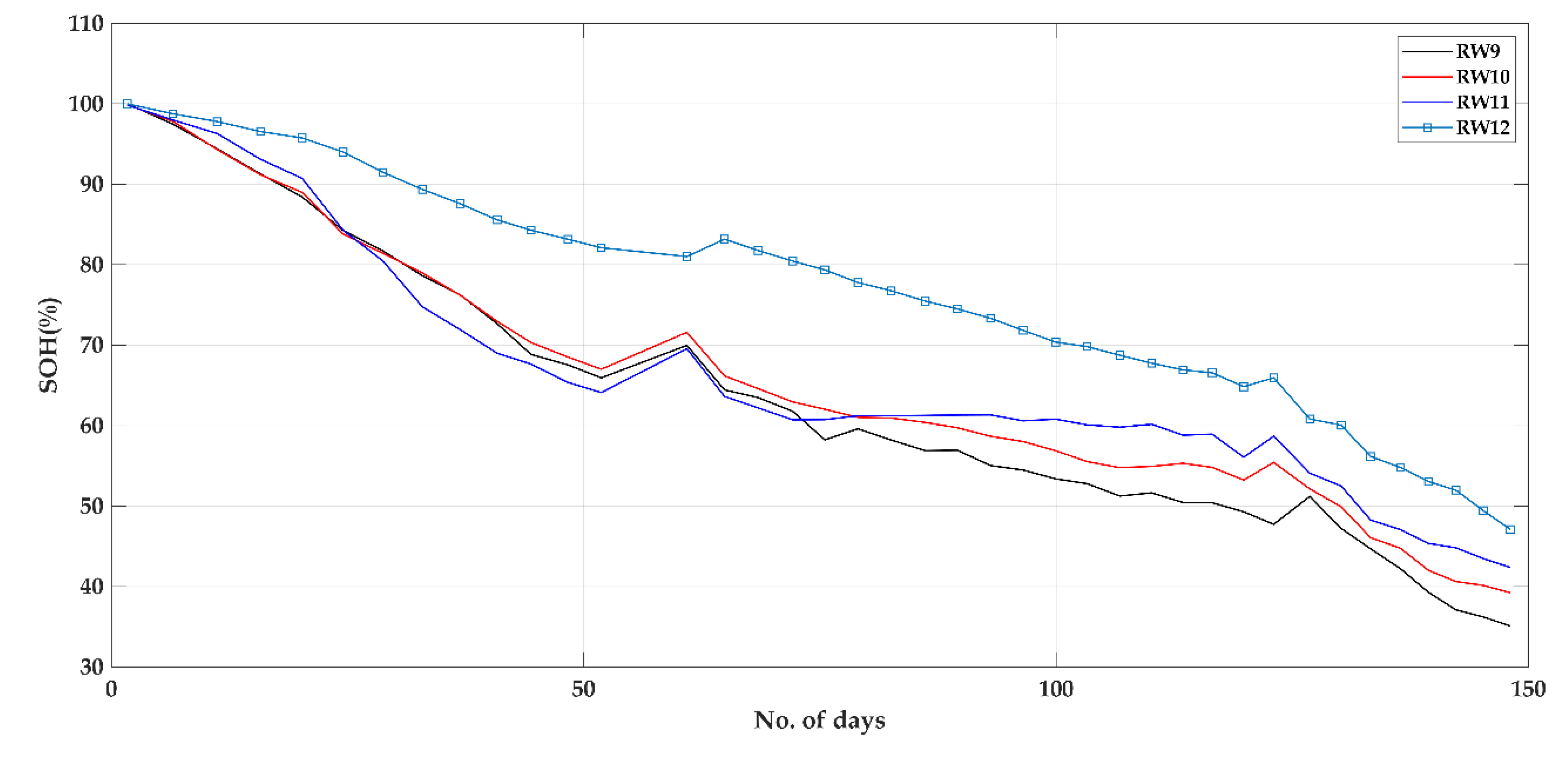
3. NASA’s Randomized Battery Usage Dataset
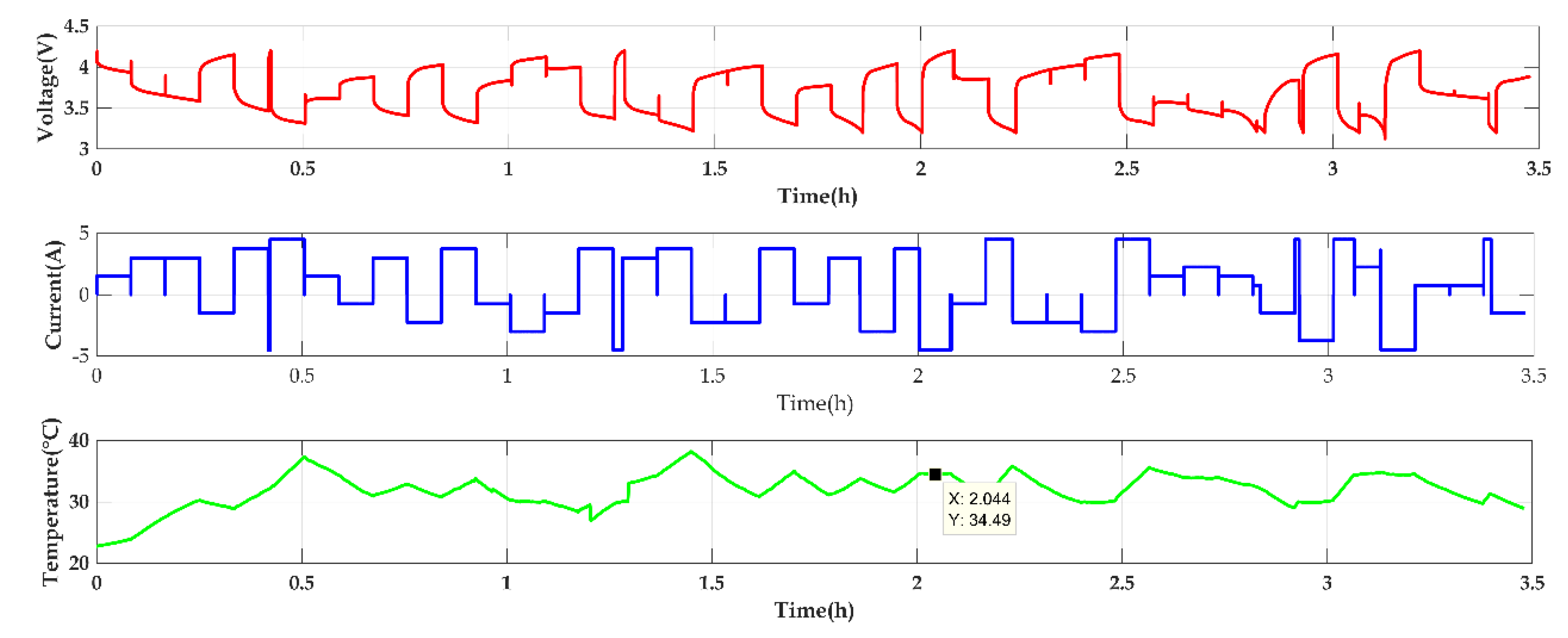
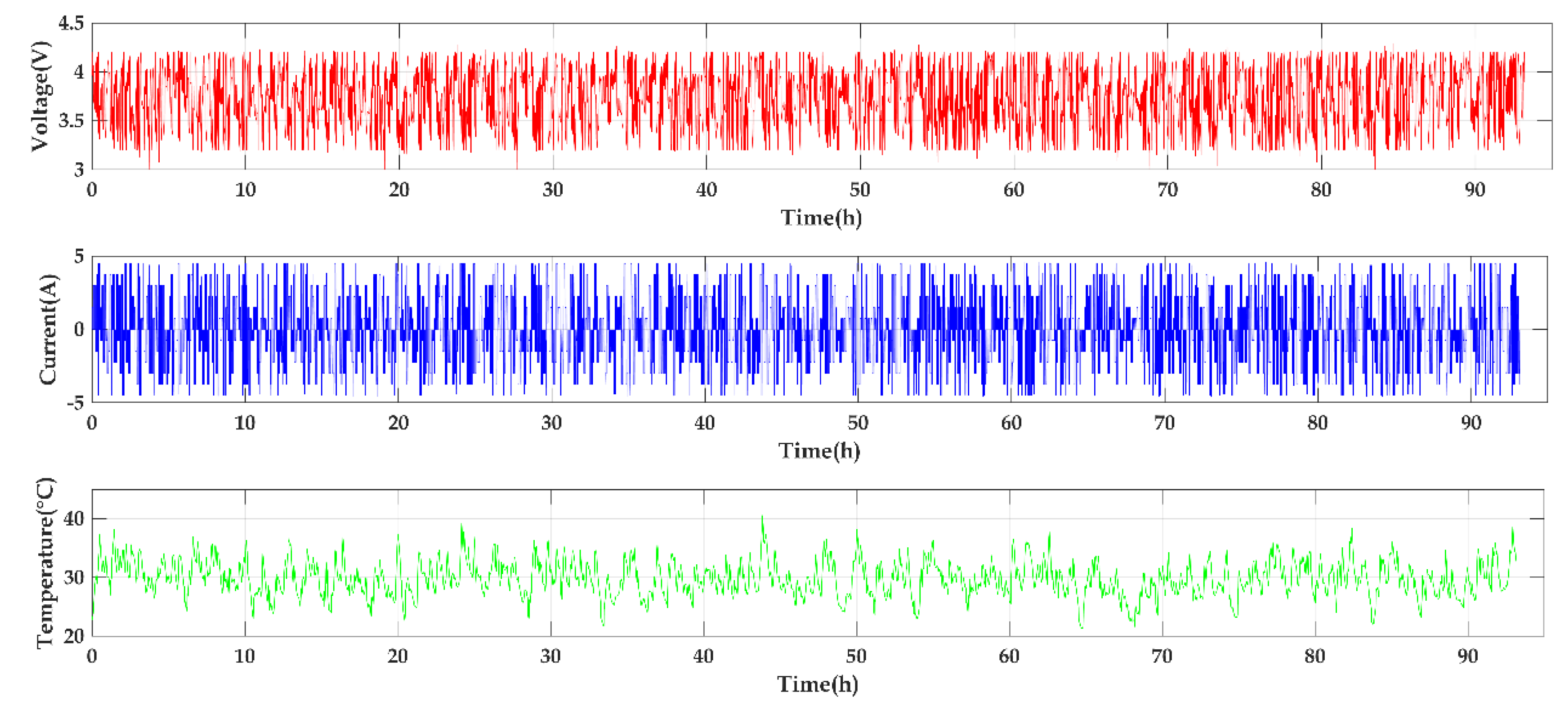
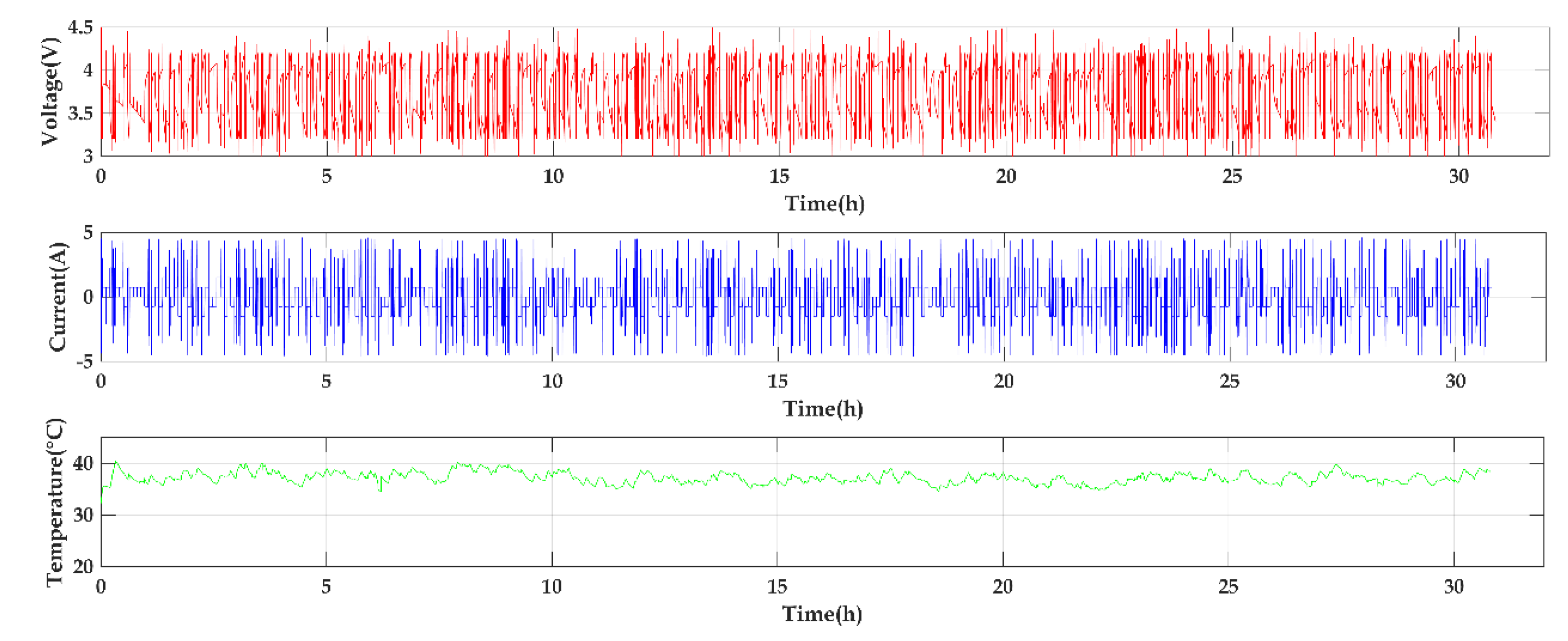
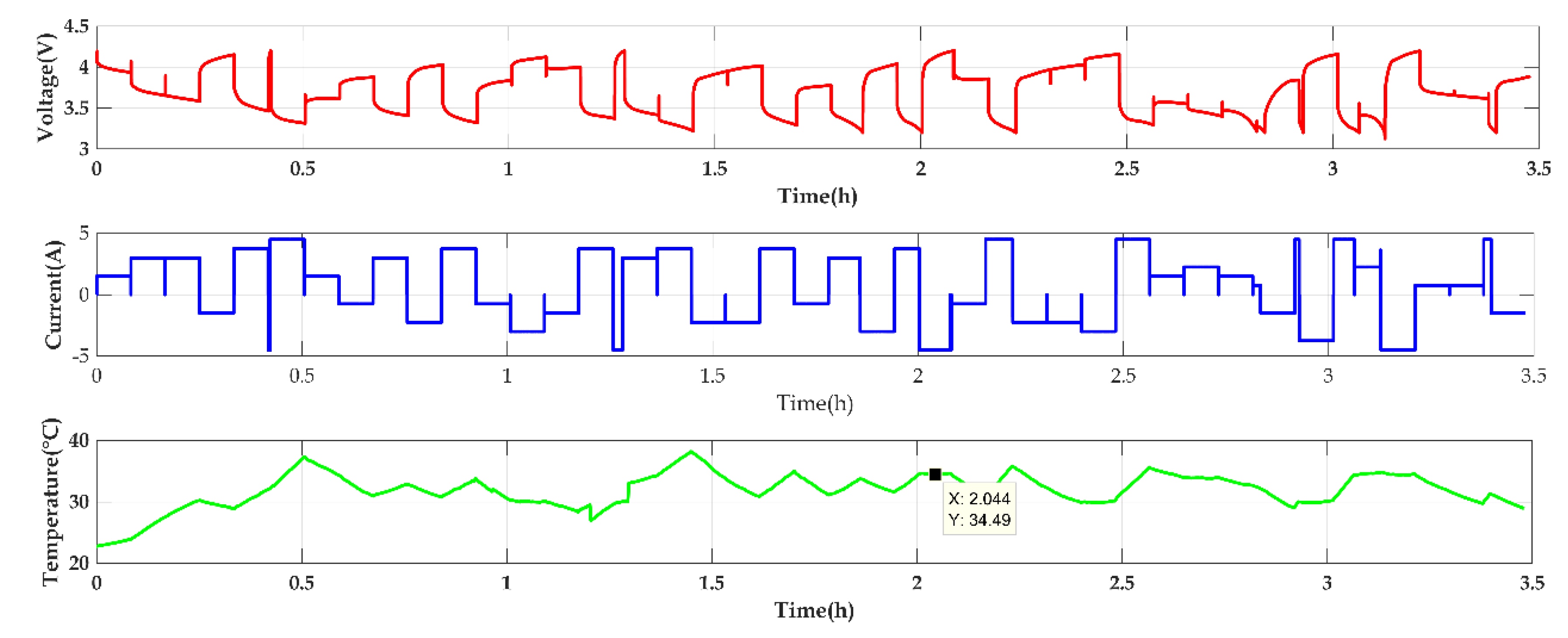
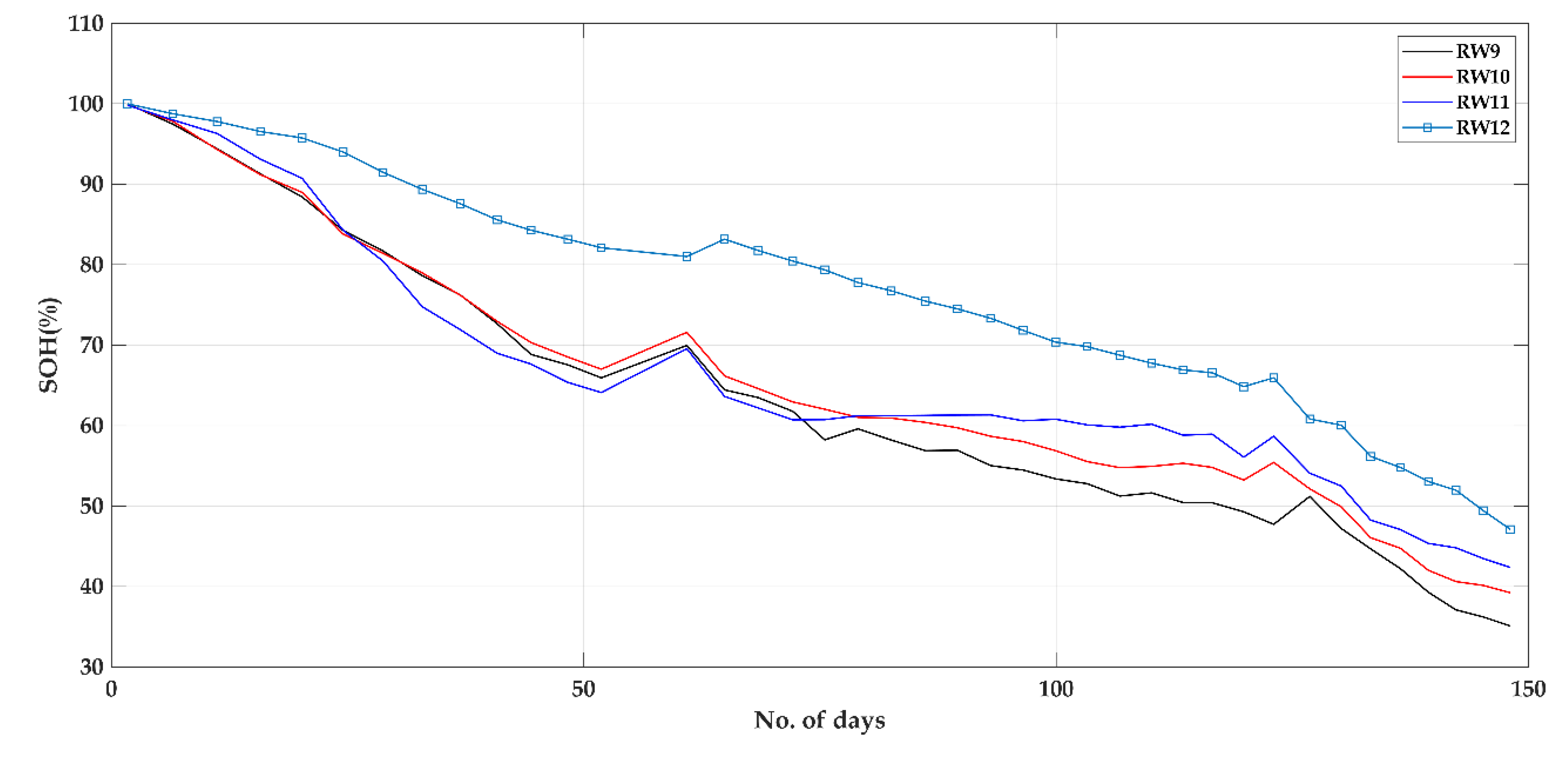
3.1. Random Walk (RW) Profile Generation
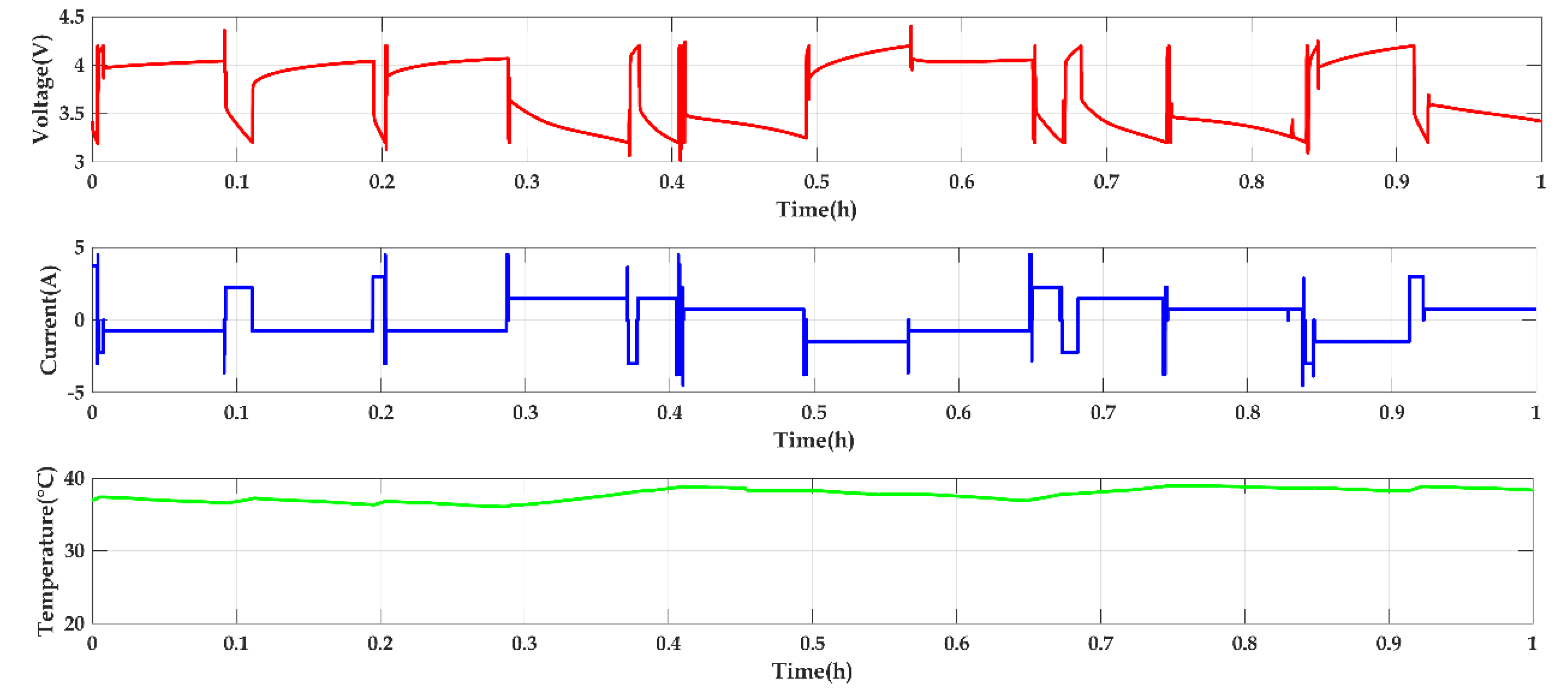
3.2. Reference Charge and Discharge Profile
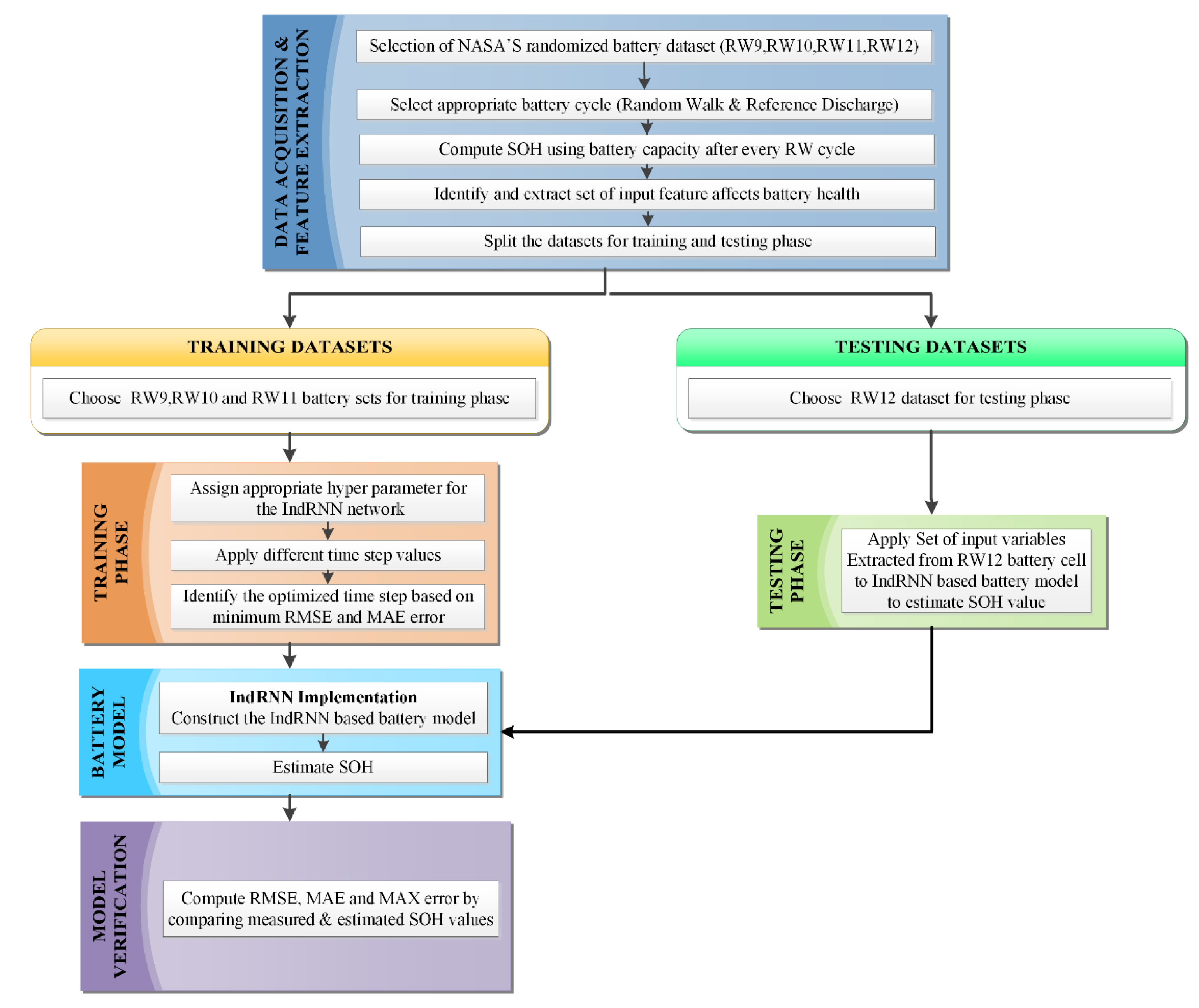
4. Framework for SOH Estimation
4.1. Input Feature Extraction
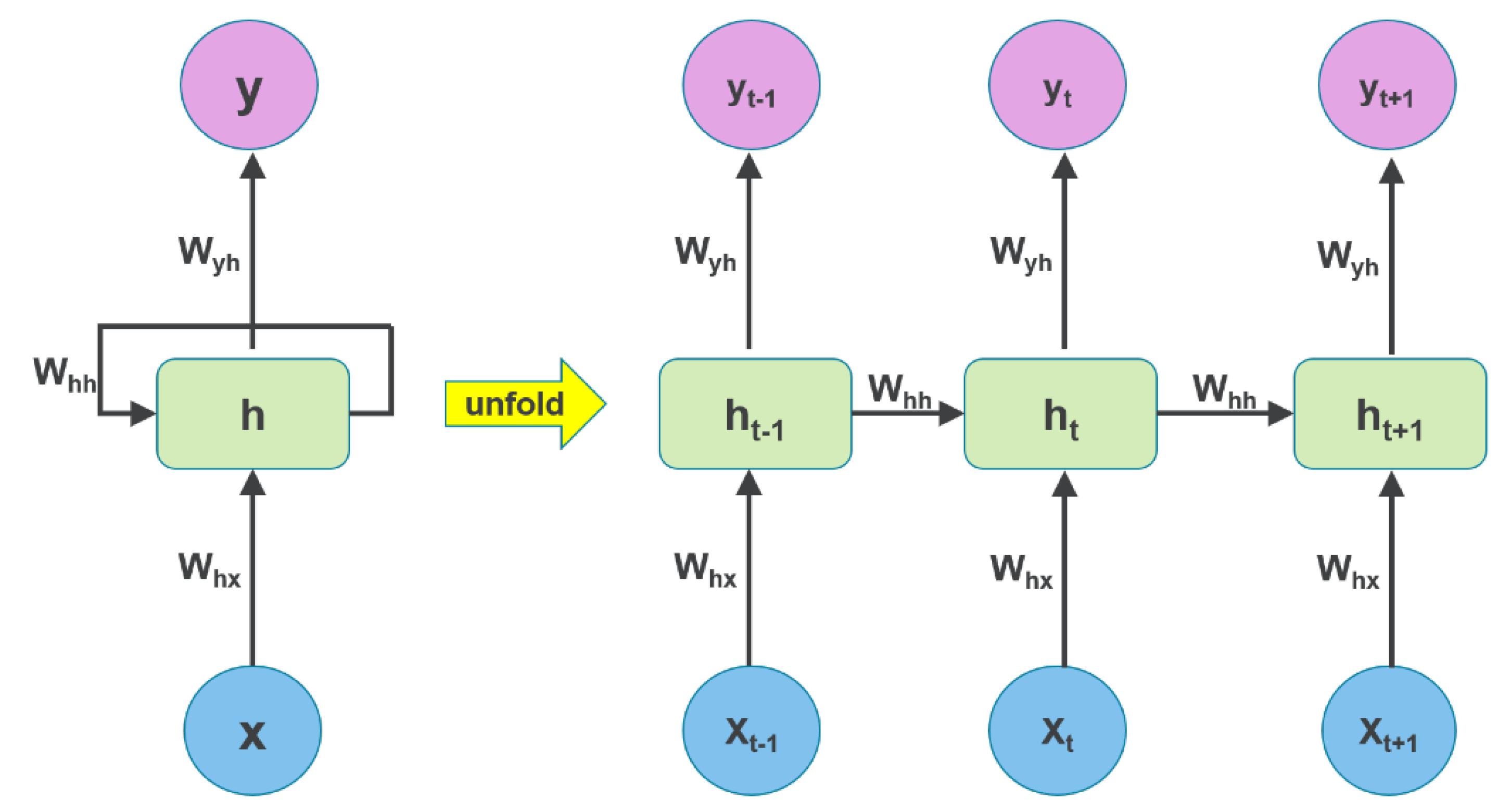
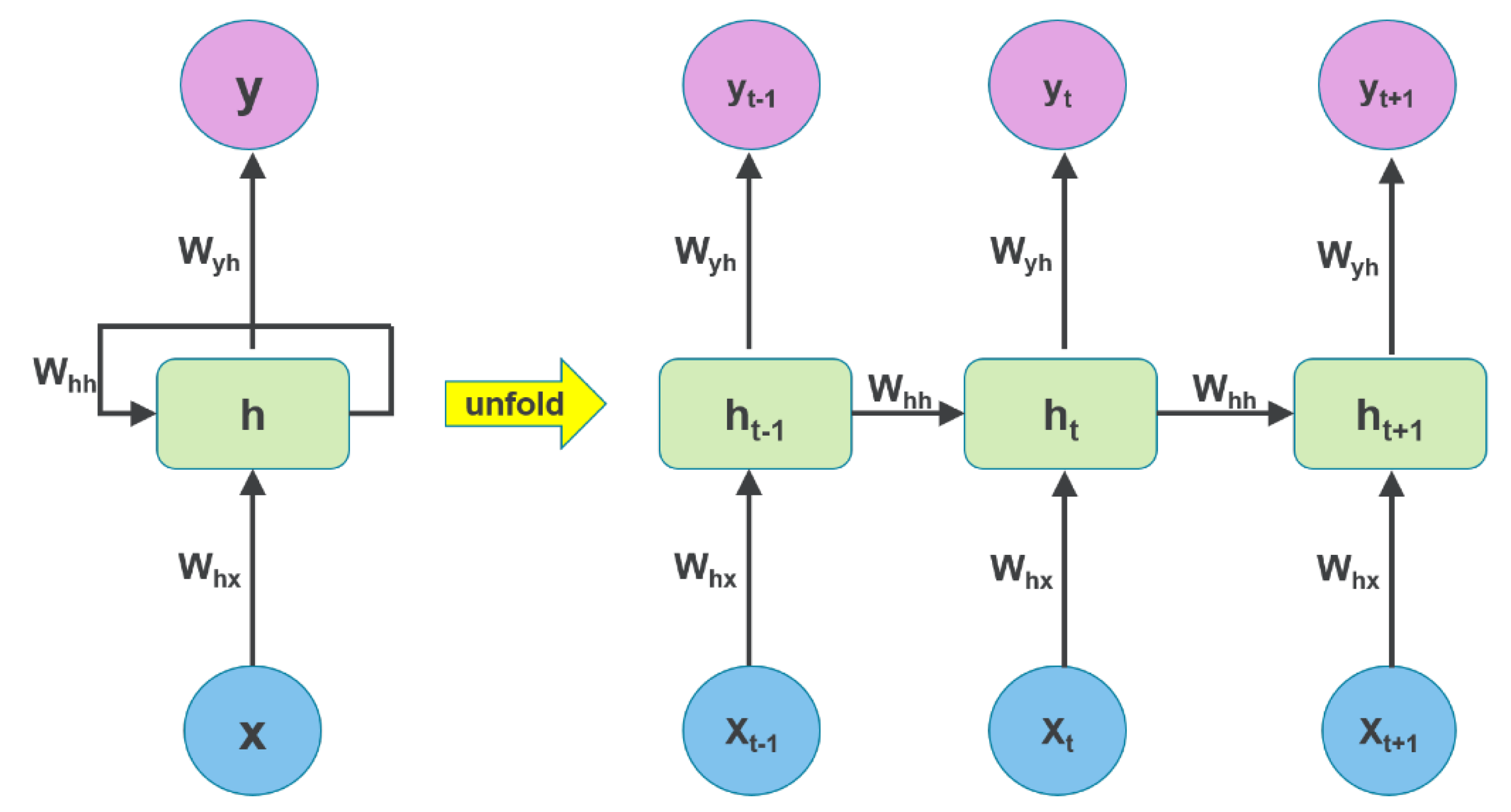
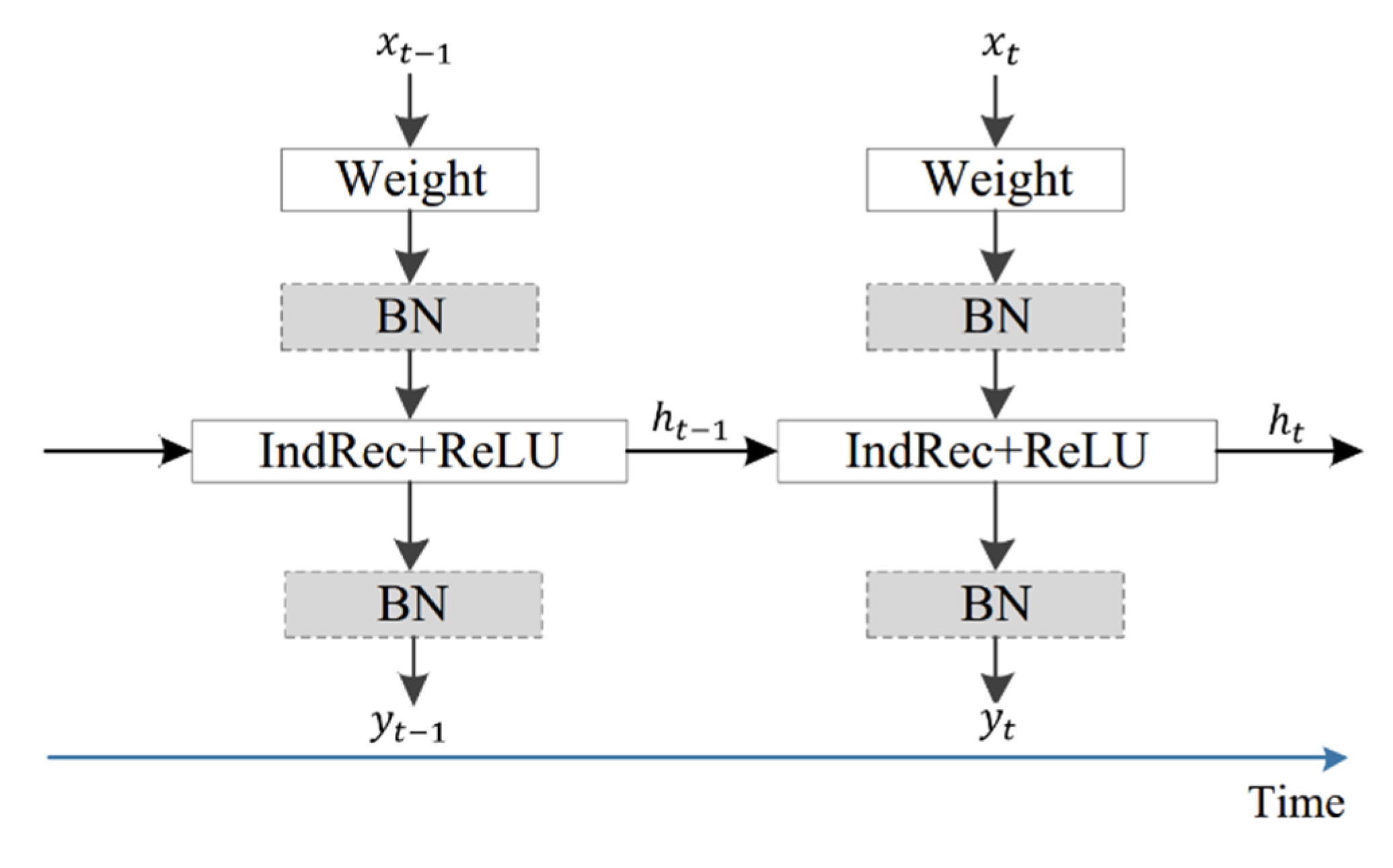
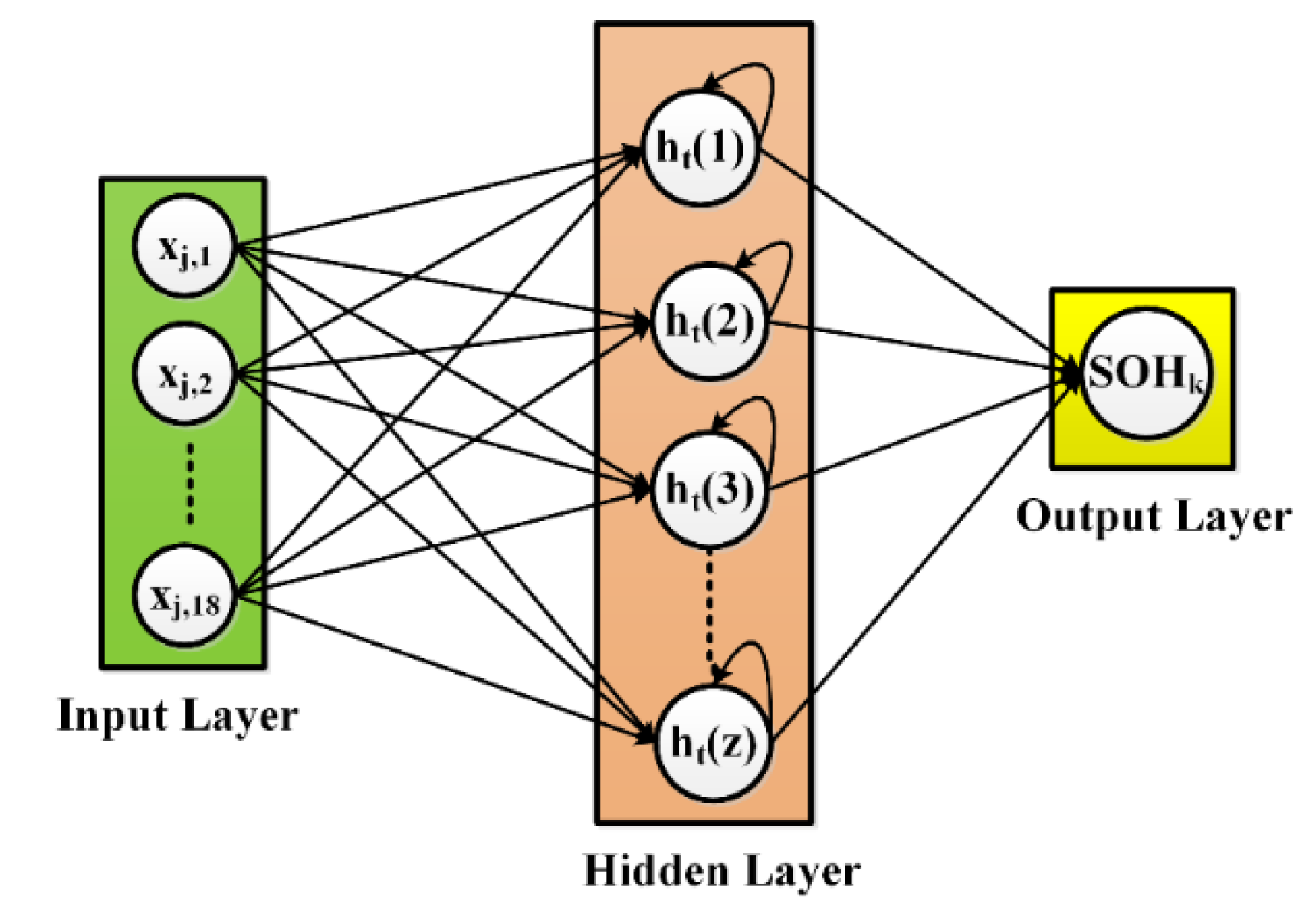
4.2. Independently Recurrent Neural Network (IndRNN) Based SOH Estimation
4.3. Performance Evaluation Criteria
4.4. Experimental Settings
5. SOH Estimation Results and Discussion
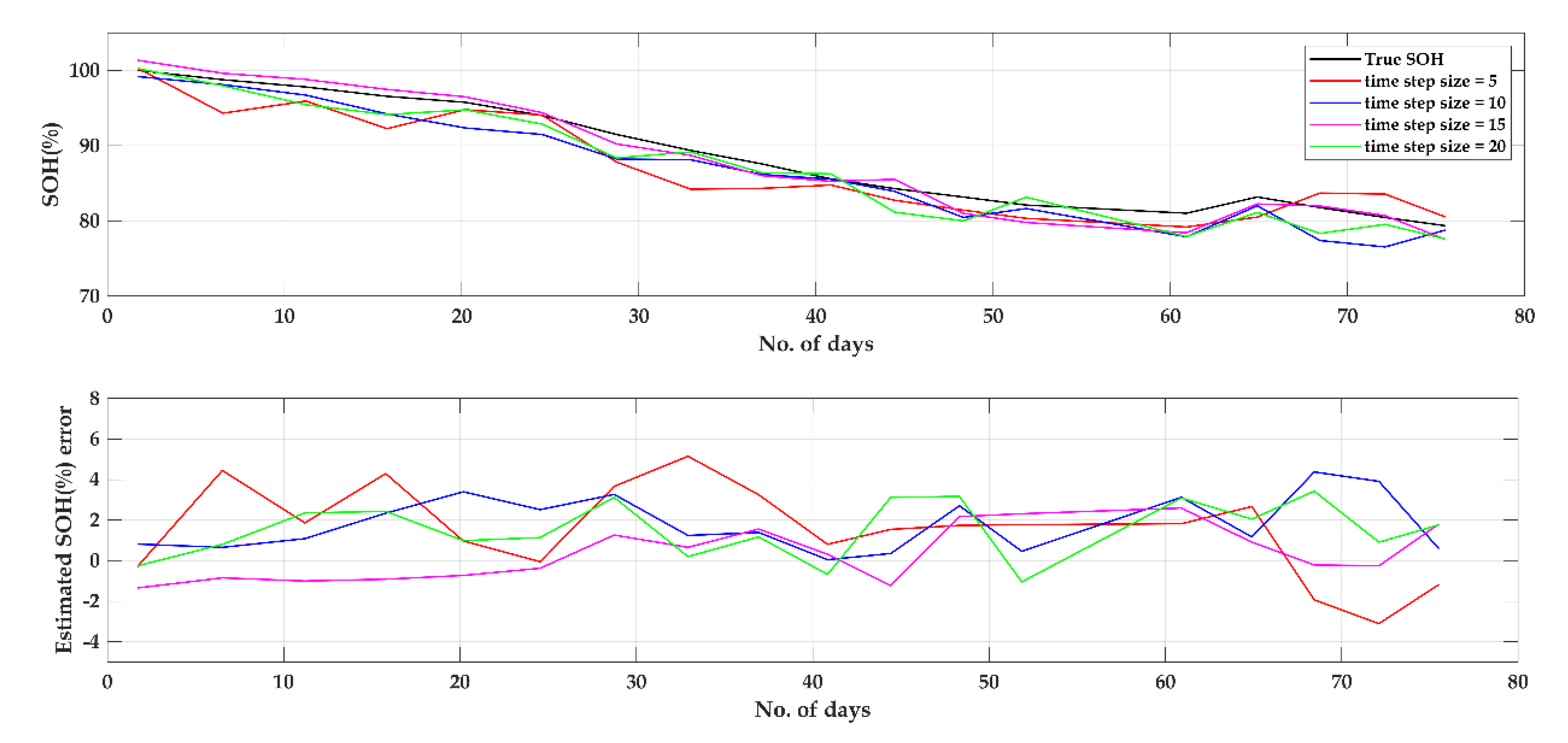
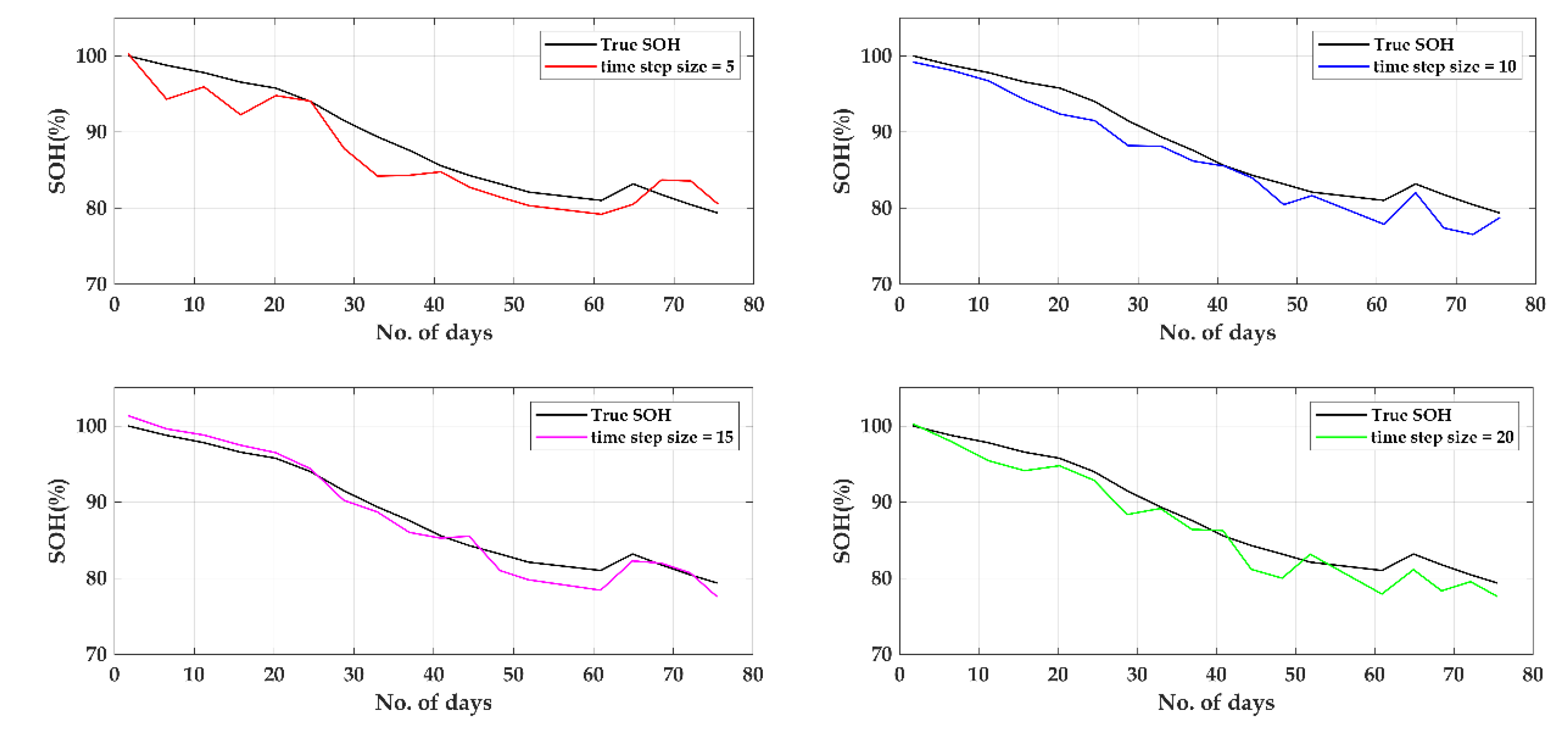
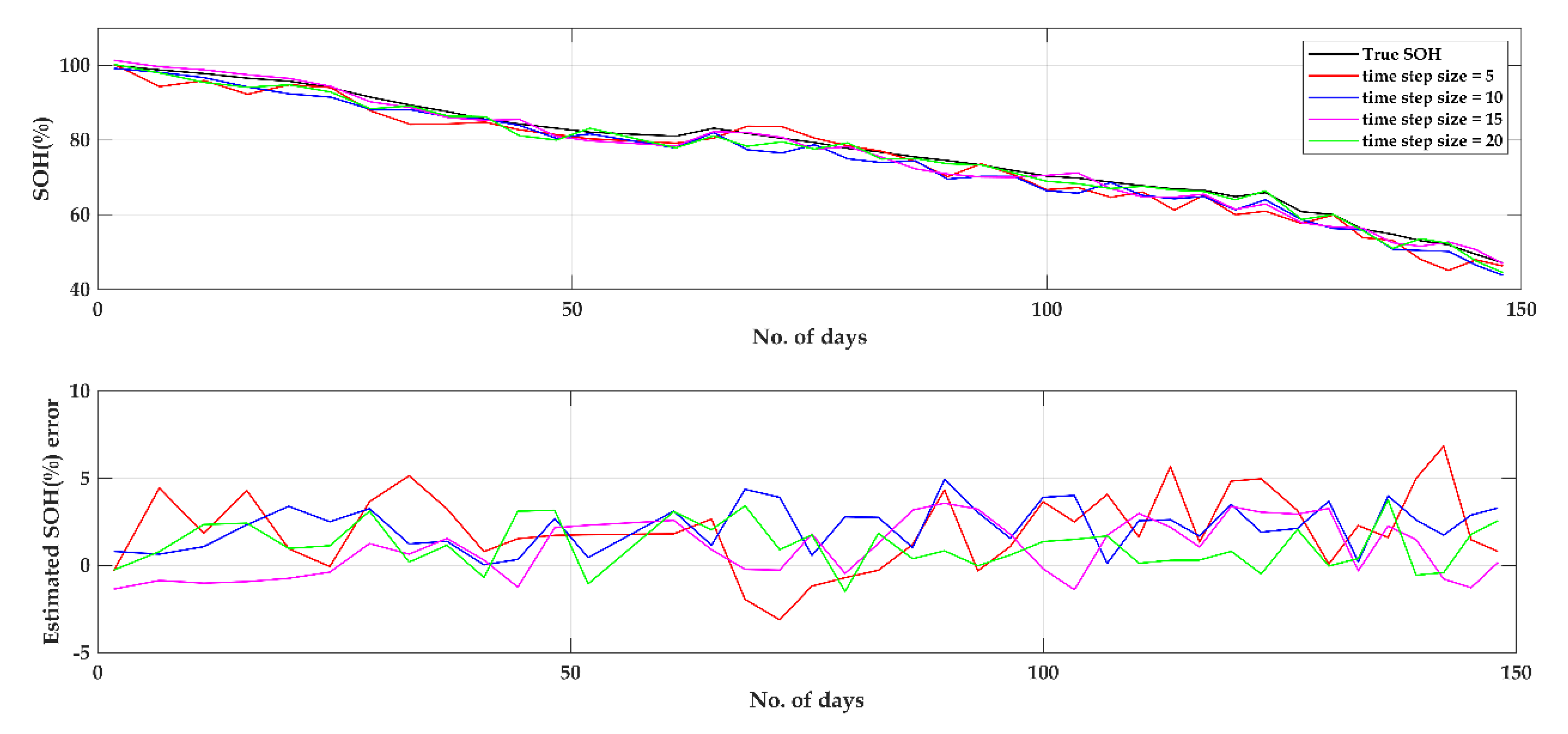
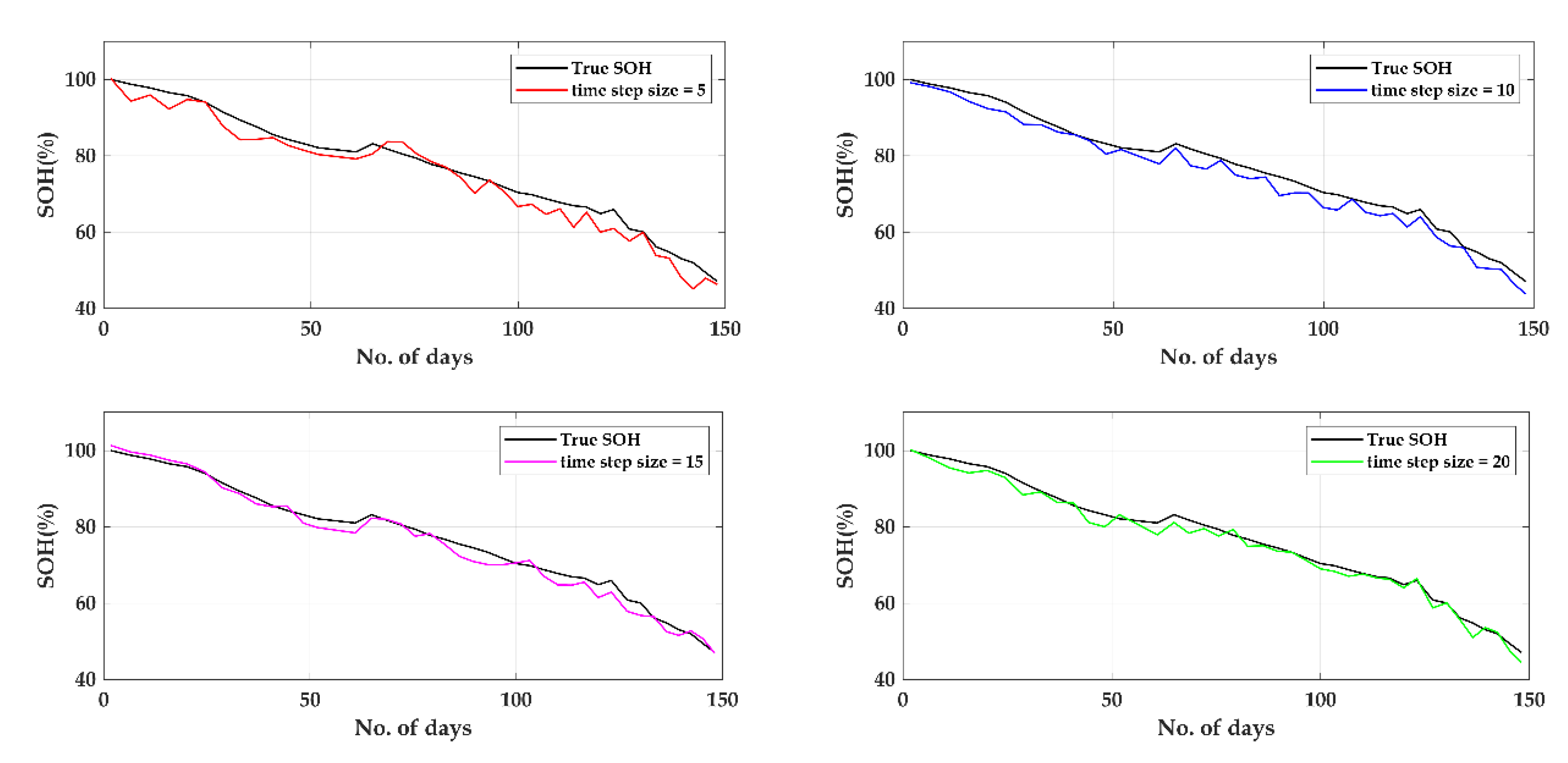
5.1. Effect of Time Step Size on IndRNN for SOH Estimation
5.2. Effect of Time-Step Size on IndRNN for SOH Estimation of up to 80% of SOH
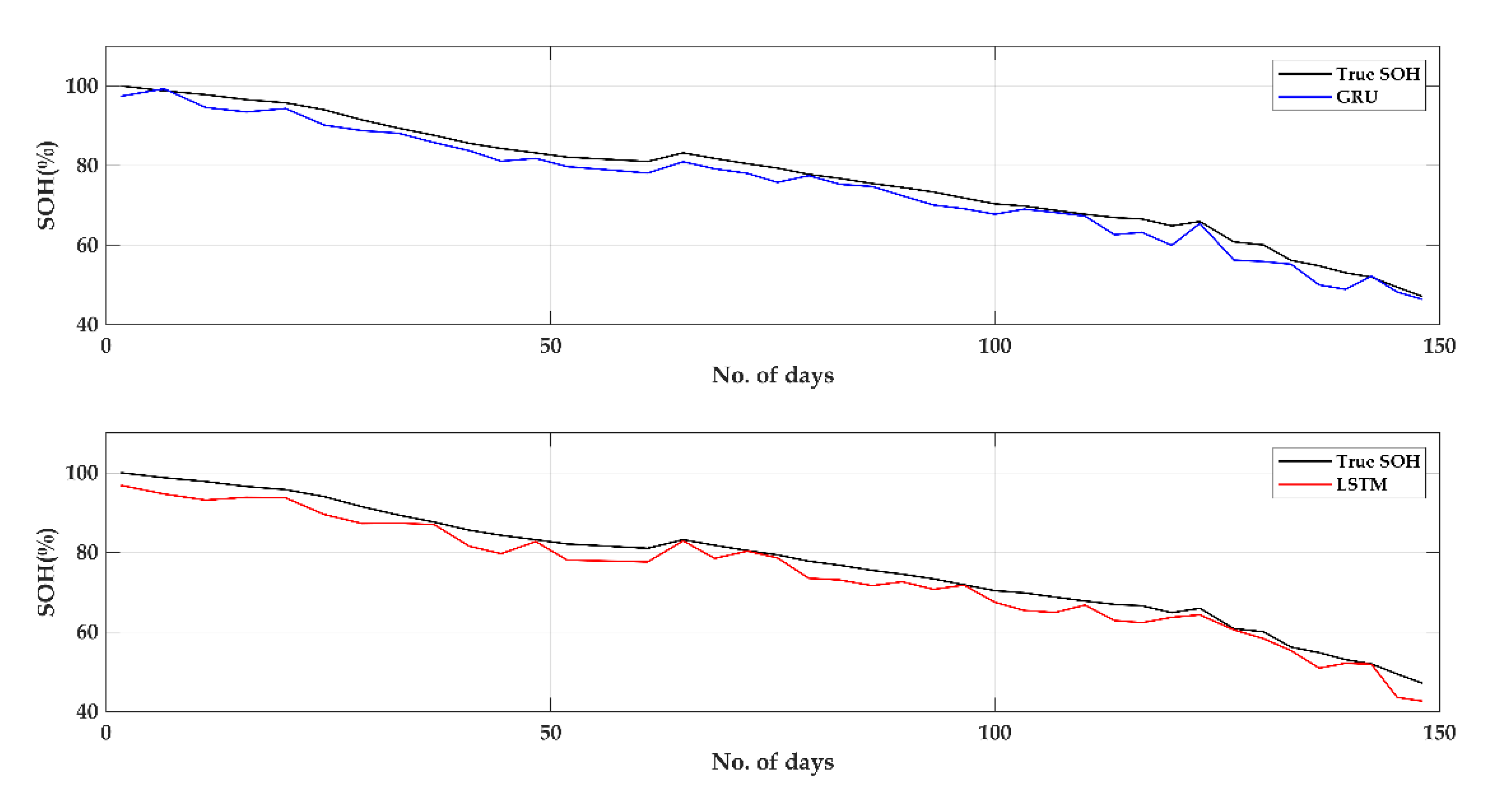
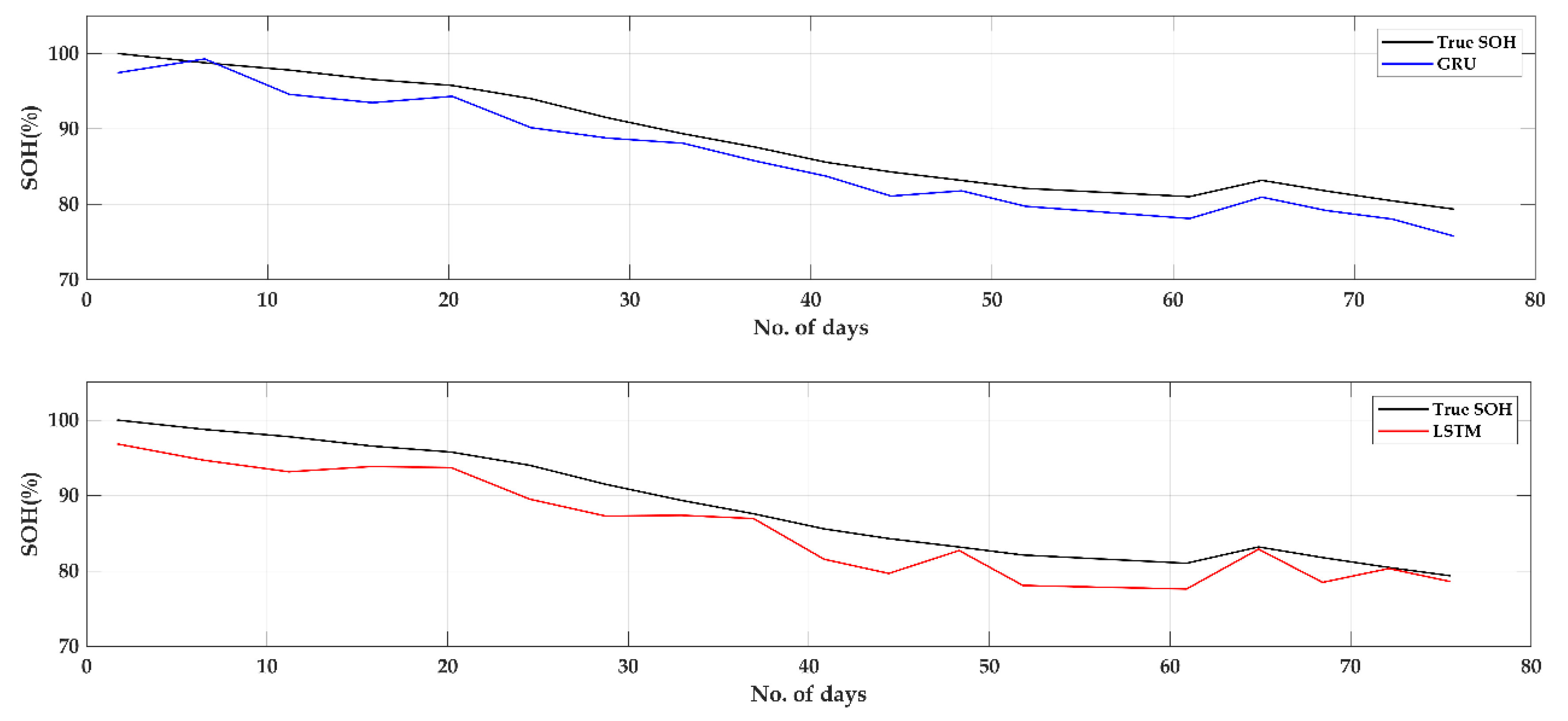
5.3. SOH Estimation Results Comparison between IndRNN, Gated Recurrent Unit (GRU) and Long Short-Term Memory (LSTM)
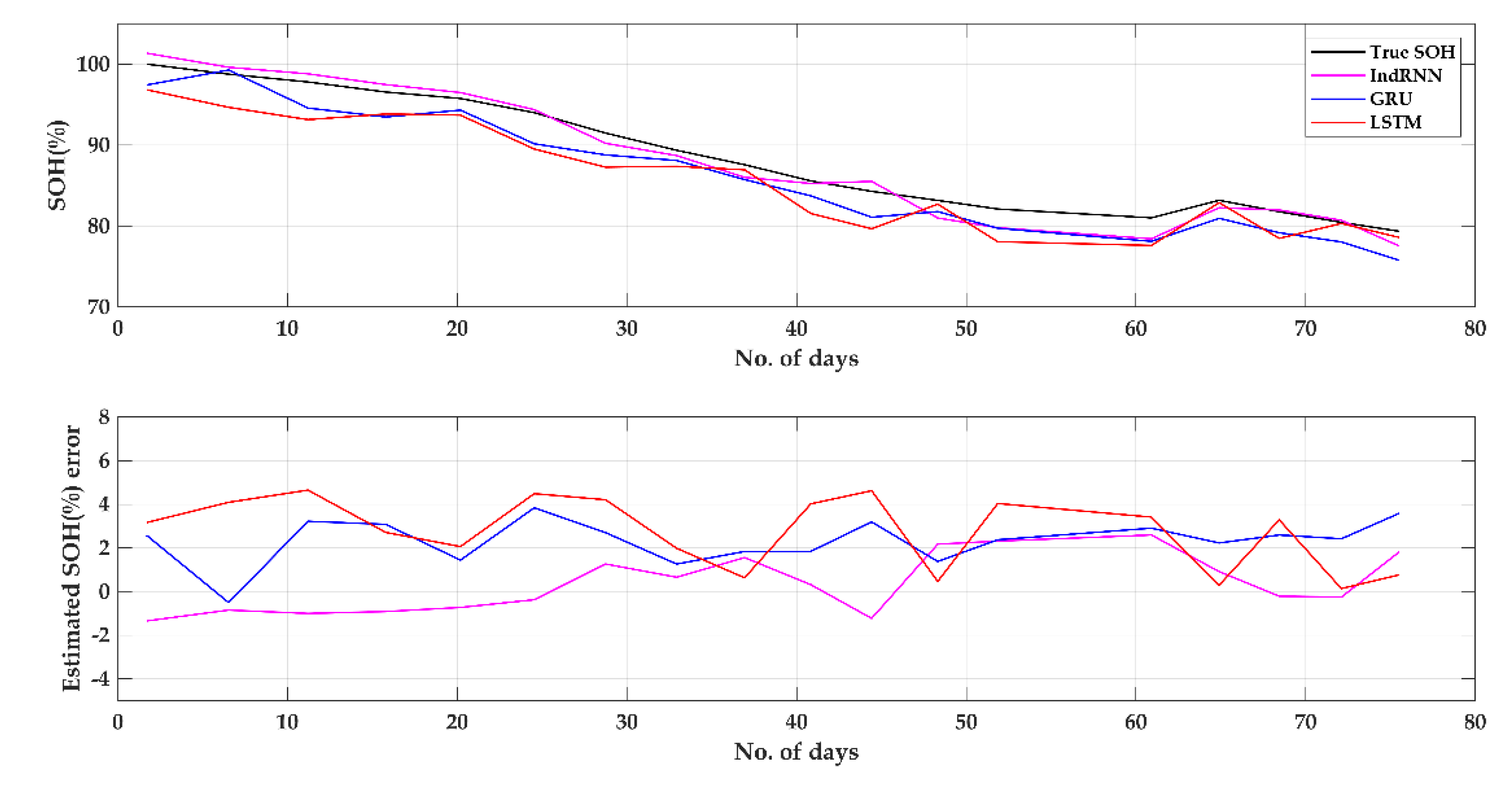
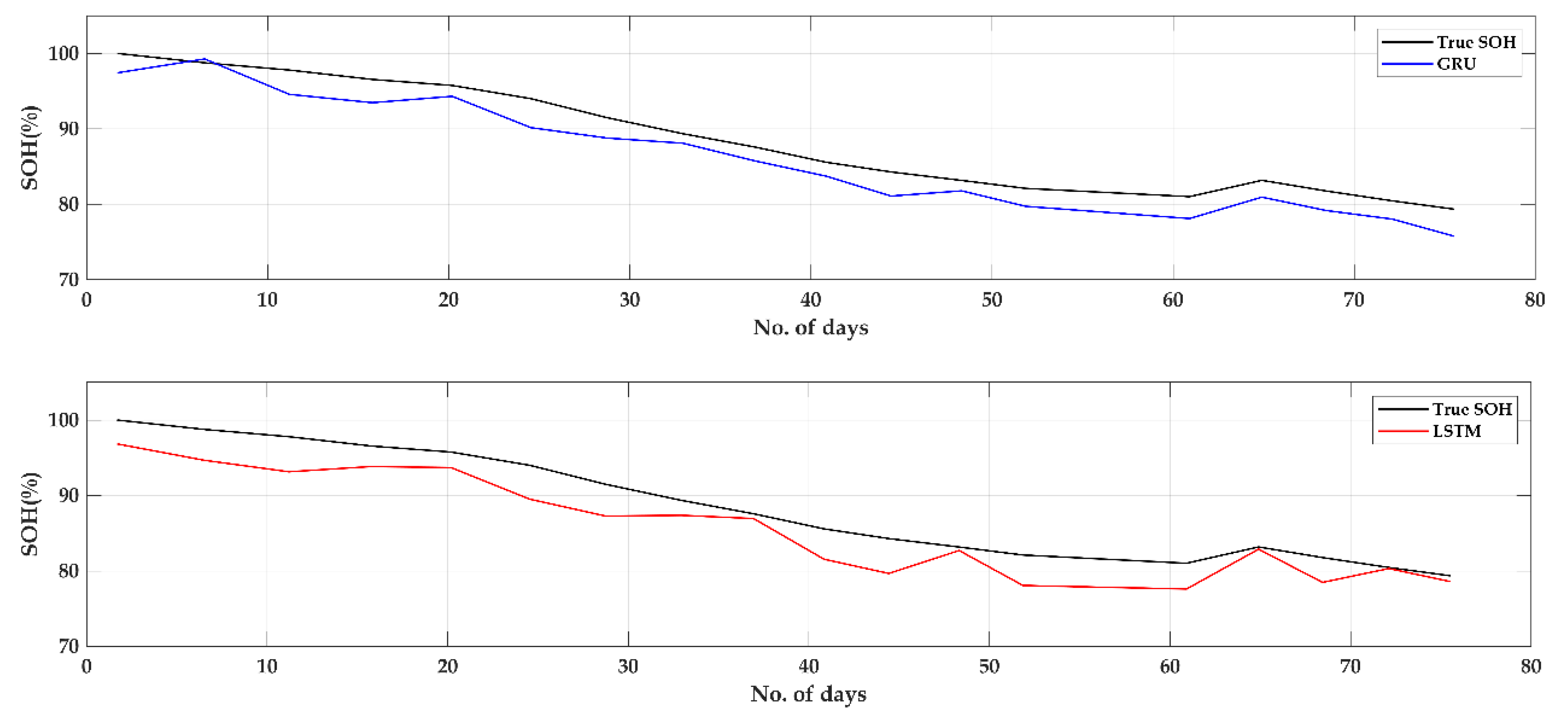
5.4. SOH Estimation Results Comparison Between IndRNN, GRU and LSTM up to 80% of SOH
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- CO2 emissions from cars: The facts. Available online: https://www.transportenvironment.org/publications/co2-emissions-cars-facts (accessed on 25 August 2019).
- Ren, G.; Ma, G.; Cong, N. Review of electrical energy storage system for vehicular applications. Renew. Sustain. Energy Rev. 2015, 41, 225–236. [Google Scholar] [CrossRef]
- Liu, K.; Li, K.; Peng, Q.; Zhang, C. A brief review on key technologies in the battery management system of electric vehicles. Front. Mech. Eng. 2018, 14, 47–64. [Google Scholar] [CrossRef]
- Young, K.; Wang, C.; Wang, L.Y.; Strunz, K. Electric vehicle battery technologies. In Electric Vehicle Integration into Modern Power Networks; Rodrigo Garcia-Valle, J.A.P.L., Ed.; Springer: New York, NY, USA, 2013; ISBN 9781461401346. [Google Scholar]
- Ruiz, V.; Pfrang, A.; Kriston, A.; Omar, N.; Bossche, P.V.D.; Boon-Brett, L. A review of international abuse testing standards and regulations for lithium ion batteries in electric and hybrid electric vehicles. Renew. Sustain. Energy Rev. 2018, 81, 1427–1452. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F. Critical Review on the Battery State of Charge Estimation Methods for Electric Vehicles. IEEE Access 2017, 6, 1832–1843. [Google Scholar] [CrossRef]
- Yang, D.; Wang, Y.; Pan, R.; Chen, R.; Chen, Z. A Neural Network Based State-of-Health Estimation of Lithium-ion Battery in Electric Vehicles. Energy Procedia 2017, 105, 2059–2064. [Google Scholar] [CrossRef]
- Lipu, M.H.; Hannan, M.; Hussain, A.; Hoque, M.; Ker, P.J.; Saad, M.; Ayob, A. A review of state of health and remaining useful life estimation methods for lithium-ion battery in electric vehicles: Challenges and recommendations. J. Clean. Prod. 2018, 205, 115–133. [Google Scholar] [CrossRef]
- Balagopal, B.; Chow, M.-Y. The state of the art approaches to estimate the state of health (SOH) and state of function (SOF) of lithium Ion batteries. In Proceedings of the 2015 IEEE 13th International Conference on Industrial Informatics (INDIN), Cambridge, UK, 22–24 July 2015; pp. 1302–1307. [Google Scholar]
- Singh, P.; Khare, N.; Chaturvedi, P.K. A Comprehensive Review on Li-Ion Battery Ageing Estimation Techniques for Green Energy Technology. Int. J. Eng. Sci. Res. Technol. 2017, 6, 22–39. [Google Scholar]
- Barré, A.; Deguilhem, B.; Grolleau, S.; Gerard, M.; Suard, F.; Riu, D. A review on lithium-ion battery ageing mechanisms and estimations for automotive applications. J. Power Sources 2013, 241, 680–689. [Google Scholar] [CrossRef]
- You, G.-W.; Park, S.; Oh, D. Real-time state-of-health estimation for electric vehicle batteries: A data-driven approach. Appl. Energy 2016, 176, 92–103. [Google Scholar] [CrossRef]
- Remmlinger, J.; Buchholz, M.; Meiler, M.; Bernreuter, P.; Dietmayer, K. State-of-health monitoring of lithium-ion batteries in electric vehicles by on-board internal resistance estimation. J. Power Sources 2011, 196, 5357–5363. [Google Scholar] [CrossRef]
- Tseng, K.-H.; Liang, J.-W.; Chang, W.; Huang, S.-C. Regression Models Using Fully Discharged Voltage and Internal Resistance for State of Health Estimation of Lithium-Ion Batteries. Energies 2015, 8, 2889–2907. [Google Scholar] [CrossRef]
- Zhu, M.; Hu, W.; Kar, N.C. The SOH estimation of LiFePO4 battery based on internal resistance with Grey Markov Chain. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 27–29 June 2016; pp. 1–6. [Google Scholar]
- Galeotti, M.; Cinà, L.; Giammanco, C.; Cordiner, S.; Di Carlo, A. Performance analysis and SOH (state of health) evaluation of lithium polymer batteries through electrochemical impedance spectroscopy. Energy 2015, 89, 678–686. [Google Scholar] [CrossRef]
- Hung, M.-H.; Lin, C.-H.; Lee, L.-C.; Wang, C.-M. State-of-charge and state-of-health estimation for lithium-ion batteries based on dynamic impedance technique. J. Power Sources 2014, 268, 861–873. [Google Scholar] [CrossRef]
- Tong, S.; Klein, M.P.; Park, J.W. On-line optimization of battery open circuit voltage for improved state-of-charge and state-of-health estimation. J. Power Sources 2015, 293, 416–428. [Google Scholar] [CrossRef]
- Weng, C.; Sun, J.; Peng, H. A unified open-circuit-voltage model of lithium-ion batteries for state-of-charge estimation and state-of-health monitoring. J. Power Sources 2014, 258, 228–237. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.-S.; Chen, Y.-P.; Hsieh, Y.-C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Bian, X.; Liu, L.; Yan, J. A model for state-of-health estimation of lithium ion batteries based on charging profiles. Energy 2019, 177, 57–65. [Google Scholar] [CrossRef]
- Grandjean, T.R.B.; McGordon, A.; Jennings, P.A. Structural Identifiability of Equivalent Circuit Models for Li-Ion Batteries. Energies 2017, 10, 90. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Fan, J. Evaluation of Lithium-Ion Battery Equivalent Circuit Models for State of Charge Estimation by an Experimental Approach. Energies 2011, 4, 582–598. [Google Scholar] [CrossRef]
- Huang, M.; Kumar, M. Electrochemical Model-Based Aging Characterization of Lithium-Ion Battery Cell in Electrified Vehicles. In Proceedings of the ASME 2018 Dynamic Systems and Control Conference (DSCC 2018), Atlanta, GA, USA, 30 September–3 October 2018; Volume 3, pp. 1–10. [Google Scholar]
- Fang, L.; Li, J.; Peng, B. Online Estimation and Error Analysis of both SOC and SOH of Lithium-ion Battery based on DEKF Method. Energy Procedia 2019, 158, 3008–3013. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, G.; Fang, L. Battery state estimation using Unscented Kalman Filter. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; Volume 3, pp. 1863–1868. [Google Scholar]
- Topan, P.A.; Ramadan, M.N.; Fathoni, G.; Cahyadi, A.I.; Wahyunggoro, O. State of Charge (SOC) and State of Health (SOH) estimation on lithium polymer battery via Kalman filter. In Proceedings of the 2016 2nd International Conference on Science and Technology-Computer (ICST), Yogyakarta, Indonesia, 27–28 October 2016; pp. 93–96. [Google Scholar]
- Schwunk, S.; Armbruster, N.; Straub, S.; Kehl, J.; Vetter, M. Particle filter for state of charge and state of health estimation for lithium–iron phosphate batteries. J. Power Sources 2013, 239, 705–710. [Google Scholar] [CrossRef]
- Bakas, E.; Rosca, B.; Wilkins, S.; Donkers, T. Least-Squares-Based Capacity Estimation for Lithium-ion Battery Cells. In Proceedings of the EEVC 2017—The European Battery, Hybrid & Fuel Cell Electric Vehicle Congress, Geneva, Switzerland, 14–17 March 2017. [Google Scholar]
- Todeschini, F.; Onori, S.; Rizzoni, G. An experimentally validated capacity degradation model for Li-ion batteries in PHEVs applications. IFAC Proc. Vol. 2012, 8, 456–461. [Google Scholar] [CrossRef]
- Ananto, P.; Syabani, F.; Indra, W.D.; Wahyunggoro, O.; Cahyadi, A.I. The state of health of Li-Po batteries based on the battery’s parameters and a fuzzy logic system. In Proceedings of the 2013 Joint International Conference on Rural Information & Communication Technology and Electric-Vehicle Technology (rICT & ICeV-T), Bandung, Indonesia, 26–28 November 2013. [Google Scholar]
- Kim, J. Fuzzy logic-controlled online state-of-health (SOH) prediction in large format LiMn2O4 cell for energy storage system (ESS) applications BT. In Proceedings of the 2014 IEEE International Conference on Industrial Technology, ICIT 2014, Busan, Korea, 26 February–1 March 2014; pp. 474–479. [Google Scholar]
- Nuhic, A.; Terzimehic, T.; Soczka-Guth, T.; Buchholz, M.; Dietmayer, K. Health diagnosis and remaining useful life prognostics of lithium-ion batteries using data-driven methods. J. Power Sources 2013, 239, 680–688. [Google Scholar] [CrossRef]
- Chen, Z.; Sun, M.; Shu, X.; Xiao, R.; Shen, J. Online State of Health Estimation for Lithium-Ion Batteries Based on Support Vector Machine. Appl. Sci. 2018, 8, 925. [Google Scholar] [CrossRef]
- Lin, H.T.; Liang, T.J.; Chen, S.M. Estimation of battery state of health using probabilistic neural network. IEEE Trans. Ind. Inform. 2013, 9, 679–685. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Y.; Zhang, X.; Chen, Z. A novel state of health estimation method of Li-ion battery using group method of data handling. J. Power Sources 2016, 327, 457–464. [Google Scholar] [CrossRef]
- Kim, J.; Yu, J.; Kim, M.; Kim, K.; Han, S. Estimation of Li-ion Battery State of Health based on Multilayer Perceptron: as an EV Application. IFAC-PapersOnLine 2018, 51, 392–397. [Google Scholar] [CrossRef]
- Chaoui, H.; Ibe-Ekeocha, C.C. State of Charge and State of Health Estimation for Lithium Batteries Using Recurrent Neural Networks. IEEE Trans. Veh. Technol. 2017, 66, 8773–8783. [Google Scholar] [CrossRef]
- You, G.-W.; Park, S.; Oh, D. Diagnosis of Electric Vehicle Batteries Using Recurrent Neural Networks. IEEE Trans. Ind. Electron. 2017, 64, 4885–4893. [Google Scholar] [CrossRef]
- Lui, Y.; Zhao, G.; Peng, X.; Hu, C. Lithium-ion battery remaining useful life prediction with long short-term memory recurrent neural network. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, St. Petersburg, FL, USA, 2–5 October 2017; pp. 1–7. [Google Scholar]
- Zhang, Y.; Xiong, R.; He, H.; Pecht, M.G. Long Short-Term Memory Recurrent Neural Network for Remaining Useful Life Prediction of Lithium-Ion Batteries. IEEE Trans. Veh. Technol. 2018, 67, 5695–5705. [Google Scholar] [CrossRef]
- Bole, B.; Kulkarni, C.; Daigle, M. Randomized battery usage data set. In NASA AMES Prognostics Data Repository; NASA Ames Research Center: Moffett Field, CA, USA, 2014. [Google Scholar]
- Li, S.; Li, W.; Cook, C.; Zhu, C.; Gao, Y. Independently Recurrent Neural Network (IndRNN): Building A Longer and Deeper RNN. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition 2018, Salt Lake City, UT, USA, 18–22 June 2018; pp. 5457–5466. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SOH Method | Algorithm/Approach Used | Advantages | Disadvantages | Improvement Required | SOH Error % | References |
|---|---|---|---|---|---|---|
| EIS | Theory of evidence (ToE) |
|
|
| 3.73% | [16] |
| OCV | Parameter varying approach (PVA) |
|
|
| 0.5% to 3% | [18] |
| CC | Linear function and operations |
|
|
| 1.08% (after 28th cycle when correction is applied) | [20] |
| ECM | Incremental capacity analysis based model |
|
|
| Proprietary dataset: 0.12% NASA dataset: –0.57% to 0.19 | [21] |
| EchM | Reduced order single particle model (SPM), Brute force nearest neighbour search (NNS) |
|
|
| - | [24] |
| KF | Forgetting factor recursive least square |
|
|
| 1.52% | [25] |
| PF | Monte Carlo sampling methods |
|
|
| - | [28] |
| LS | Ordinary least squares and total least squares |
|
|
| <5% | [29] |
| FL | Center-of-gravitytechnique |
|
|
| <2% | [31] |
| SVM | Grid search method, Radial basis function |
|
|
| <2% | [34] |
| ANN | Multilayer perceptron (MLP) |
|
|
| <1.5% | [37] |
| RNN | Non-linear autoregressive with exogenous inputs (NARX),global feedback theorem (GFT) |
|
|
| 0.1 to 0.45% (For LiFePO4) | [38] |
| LSTM-RNN | Snapshot-based approach, Noise-robust approach |
|
|
| <2.46% | [39] |
| Battery Key Characteristics | Specifications |
|---|---|
| Manufacturer | LG Chem |
| Battery chemistry | 18,650 Lithium cobalt oxide vs. graphite |
| Nominal capacity | 2100 mAh |
| Lower cut-off voltage | 3.2 V |
| Upper threshold voltage | 4.2 V |
| Hyperparameters | Initialized Values |
|---|---|
| Time step | 10 |
| Number of neuron in IndRNN hidden layer | 100 |
| Number of IndRNN hidden layer | 1 |
| Optimizer | Adam |
| Learning rate | 0.0001 |
| Batch size | 10 |
| Epoch | 100 |
| Activation function | ReLU |
| Time Step Size | RMSE (%) | MAE (%) | MAX (%) |
|---|---|---|---|
| 5 | 3.0149 | 2.4624 | 6.8403 |
| 10 | 2.6146 | 2.2649 | 4.94 |
| 15 | 1.8742 | 1.5639 | 3.5786 |
| 20 | 1.7362 | 1.3796 | 3.7795 |
| Time Step Size | RMSE (%) | MAE (%) | MAX (%) |
|---|---|---|---|
| 5 | 2.6639 | 2.2545 | 5.1516 |
| 10 | 2.2775 | 1.8581 | 4.3752 |
| 15 | 1.3369 | 1.1403 | 2.5943 |
| 20 | 2.0607 | 1.7632 | 3.4287 |
| RNN Type | RMSE (%) | MAE (%) | MAX (%) |
|---|---|---|---|
| IndRNN | 1.8742 | 1.5639 | 3.5786 |
| GRU | 2.6678 | 2.2979 | 4.8978 |
| LSTM | 3.1376 | 2.6754 | 5.8633 |
| RNN Type | RMSE (%) | MAE (%) | MAX (%) |
|---|---|---|---|
| IndRNN | 1.3369 | 1.1403 | 2.5943 |
| GRU | 2.5376 | 2.3890 | 3.8415 |
| LSTM | 3.1579 | 2.7251 | 4.6522 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Venugopal, P.; T., V. State-of-Health Estimation of Li-ion Batteries in Electric Vehicle Using IndRNN under Variable Load Condition. Energies 2019, 12, 4338. https://doi.org/10.3390/en12224338
Venugopal P, T. V. State-of-Health Estimation of Li-ion Batteries in Electric Vehicle Using IndRNN under Variable Load Condition. Energies. 2019; 12(22):4338. https://doi.org/10.3390/en12224338
Chicago/Turabian StyleVenugopal, Prakash, and Vigneswaran T. 2019. "State-of-Health Estimation of Li-ion Batteries in Electric Vehicle Using IndRNN under Variable Load Condition" Energies 12, no. 22: 4338. https://doi.org/10.3390/en12224338
APA StyleVenugopal, P., & T., V. (2019). State-of-Health Estimation of Li-ion Batteries in Electric Vehicle Using IndRNN under Variable Load Condition. Energies, 12(22), 4338. https://doi.org/10.3390/en12224338