Experimental Study of Sensor Fault-Tolerant Control for an Electro-Hydraulic Actuator Based on a Robust Nonlinear Observer



Abstract
1. Introduction
- The mathematical modeling of the MMP system which is compared with [3] to apply to the UIO reconstruction.
- Constructing an inequality under matrix is performed to determine observer gain by LMI optimization algorithm.
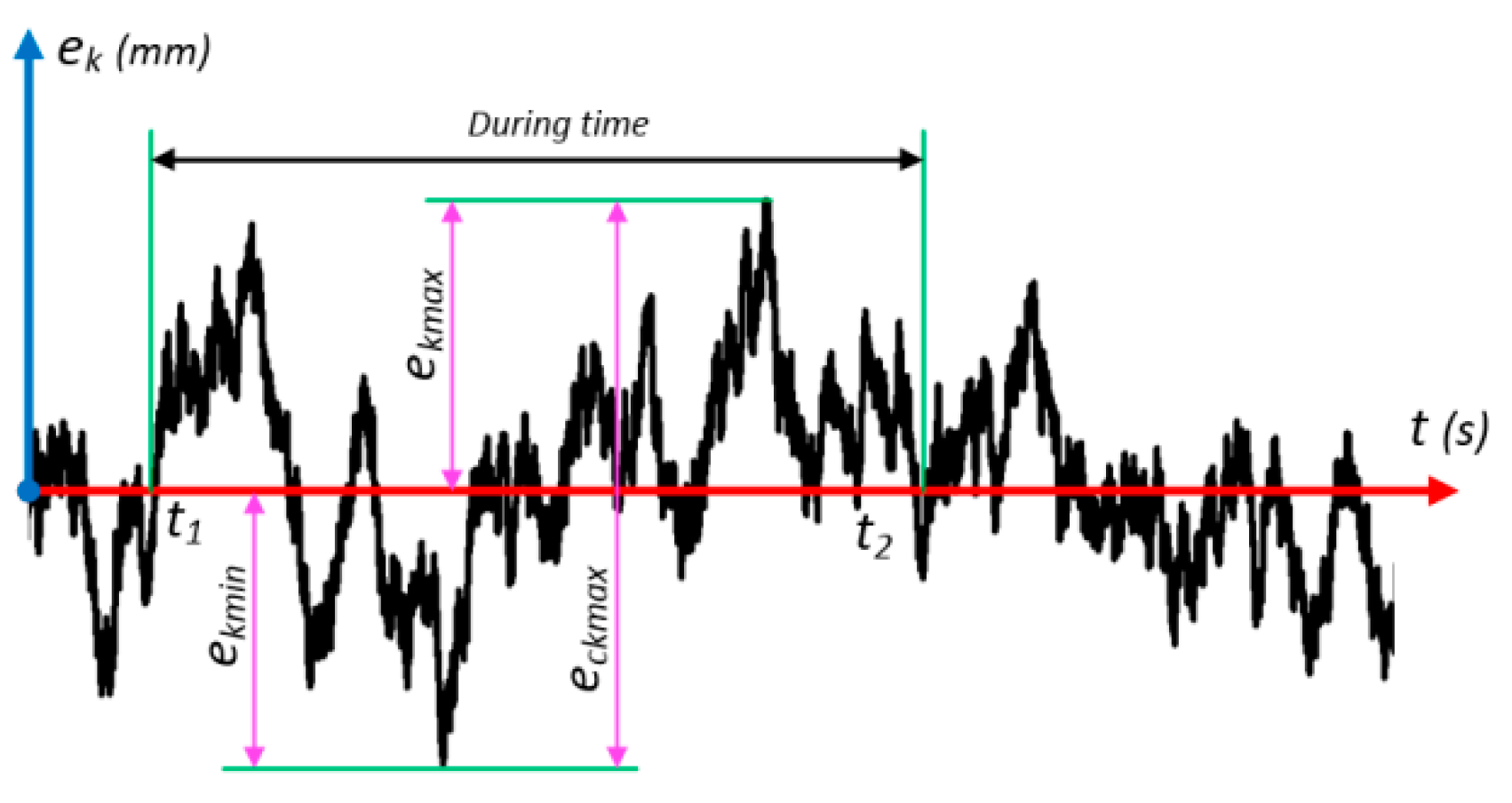
- A procedure for evaluating the tracking performance of the MMP system under disturbances and sensor faults is proposed. Based on this evaluation process, the performance level achieved during simulations and experiments can be easily obtained.
- Our major contribution in this paper shows that the proposed SFTC technique is successfully applied to reduce minimum impacts of faults and disturbances aimed at stability and safety insurance for the system.
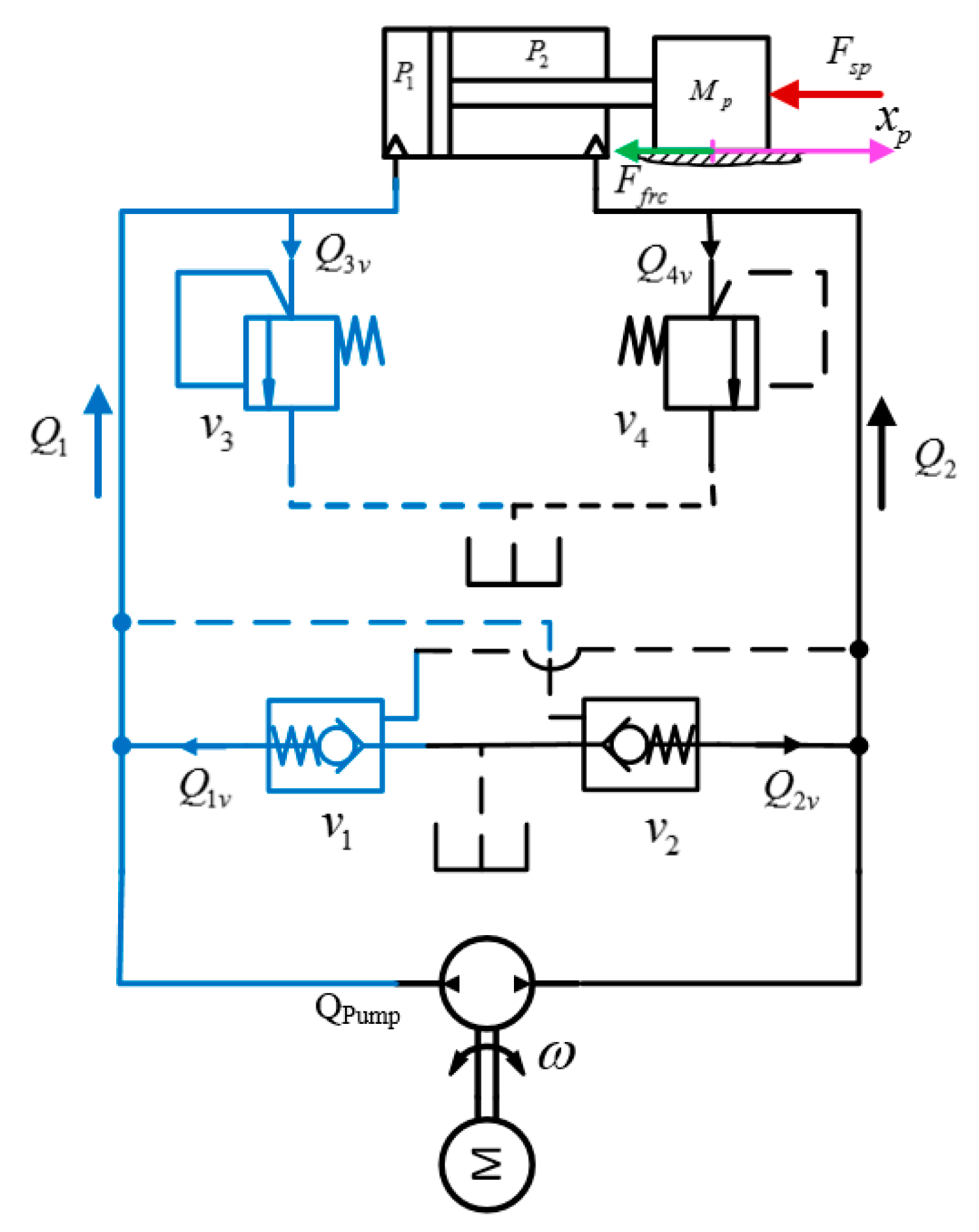
2. Modeling of the EHA System
3. UIO for a Nonlinear Discrete-Time System
- (a)
- (b)
- , andis a full column rank
- (c)
- with
- Step 1:
- Build the augmented system (12) for the nonlinear discrete-time system (10).
- Step 2:
- Determine the matrices , , , and by solving the LMI matrix inequalities (30) and (31).
- Step 3:
- Obtain the state estimate and the fault estimate as , and , respectively, where .
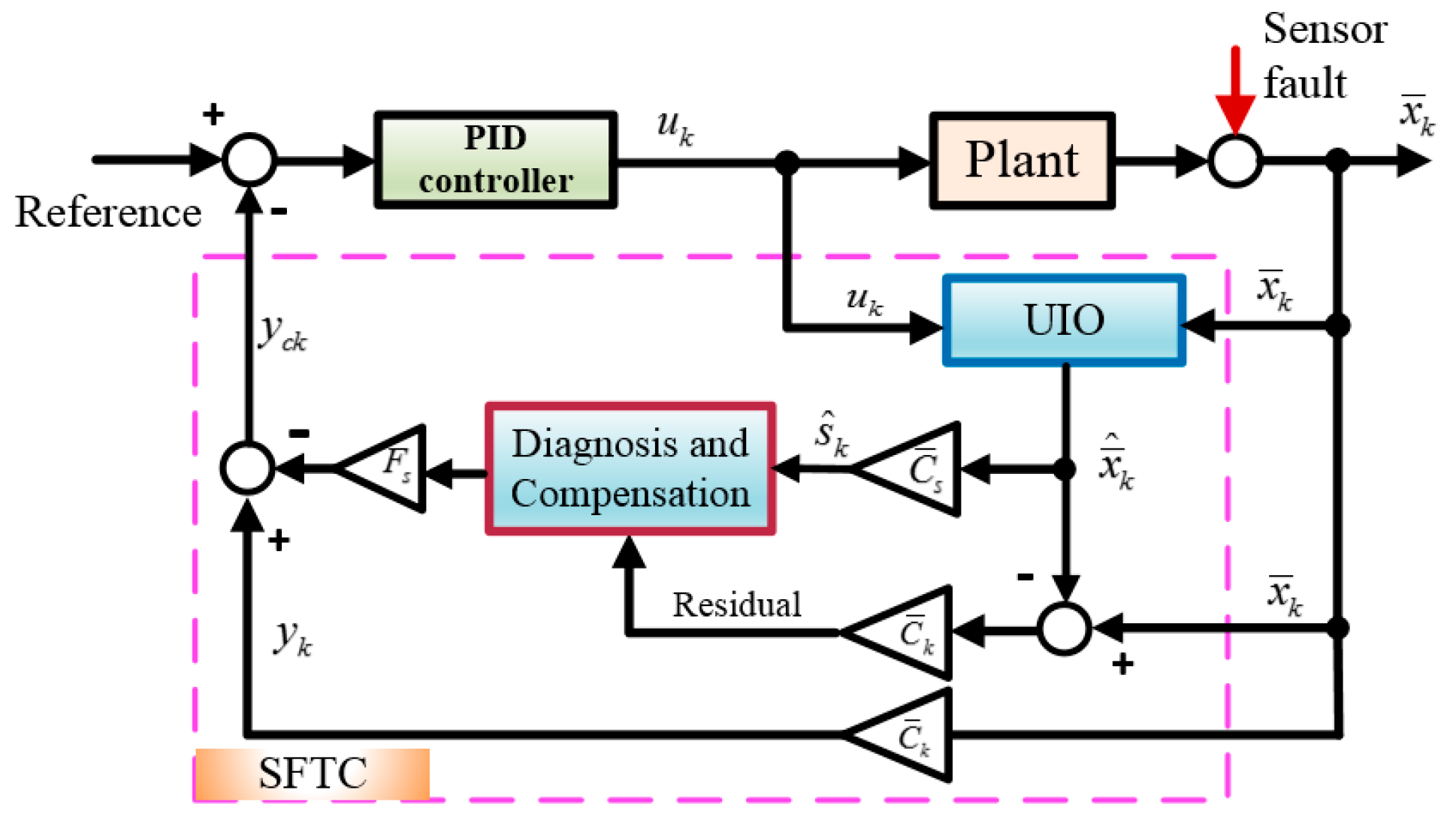
4. Sensor Fault-Tolerant Control for the MMP System
4.1. Fault Diagnosis-Based General Residual from the Sensor Fault Signal
4.2. Sensor FTC Compensation
4.3. PID Control for MMP System
5. Simulation and Experiment Results
5.1. Parameters of the MMP System
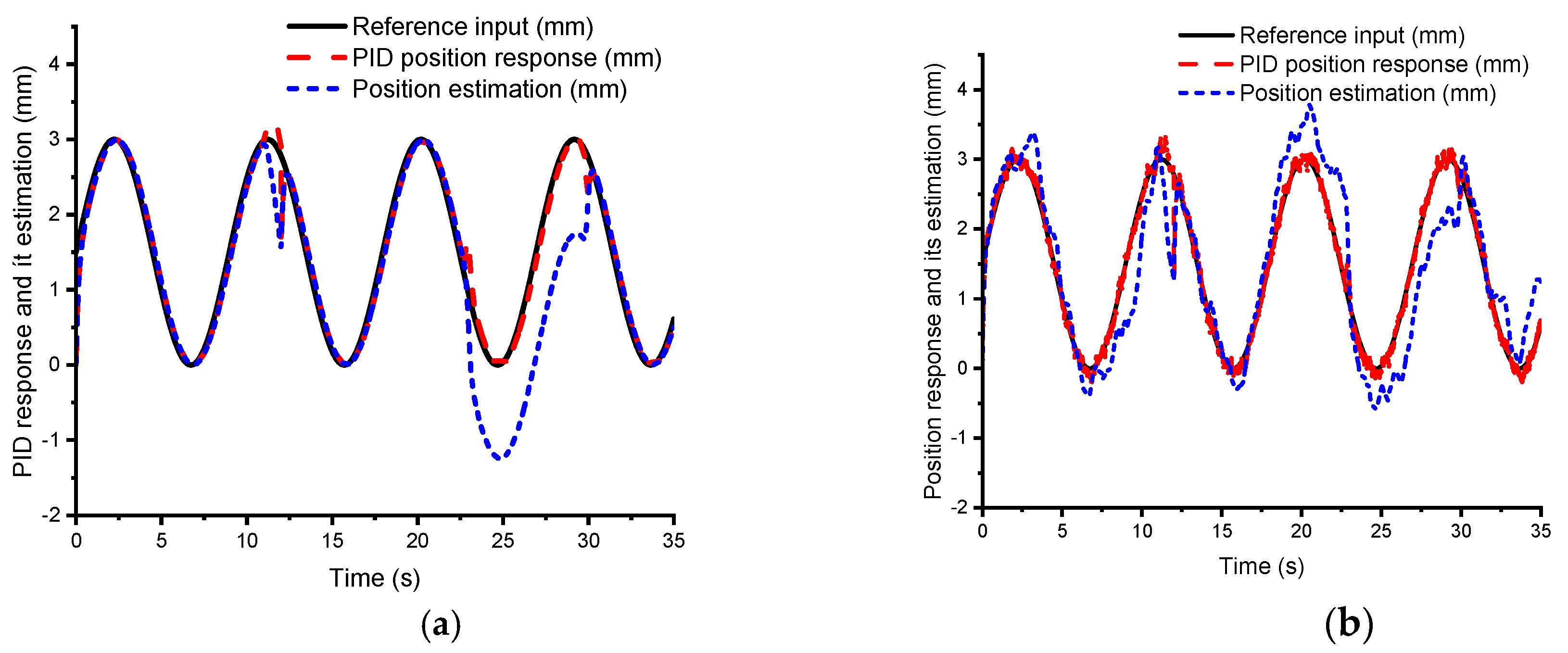
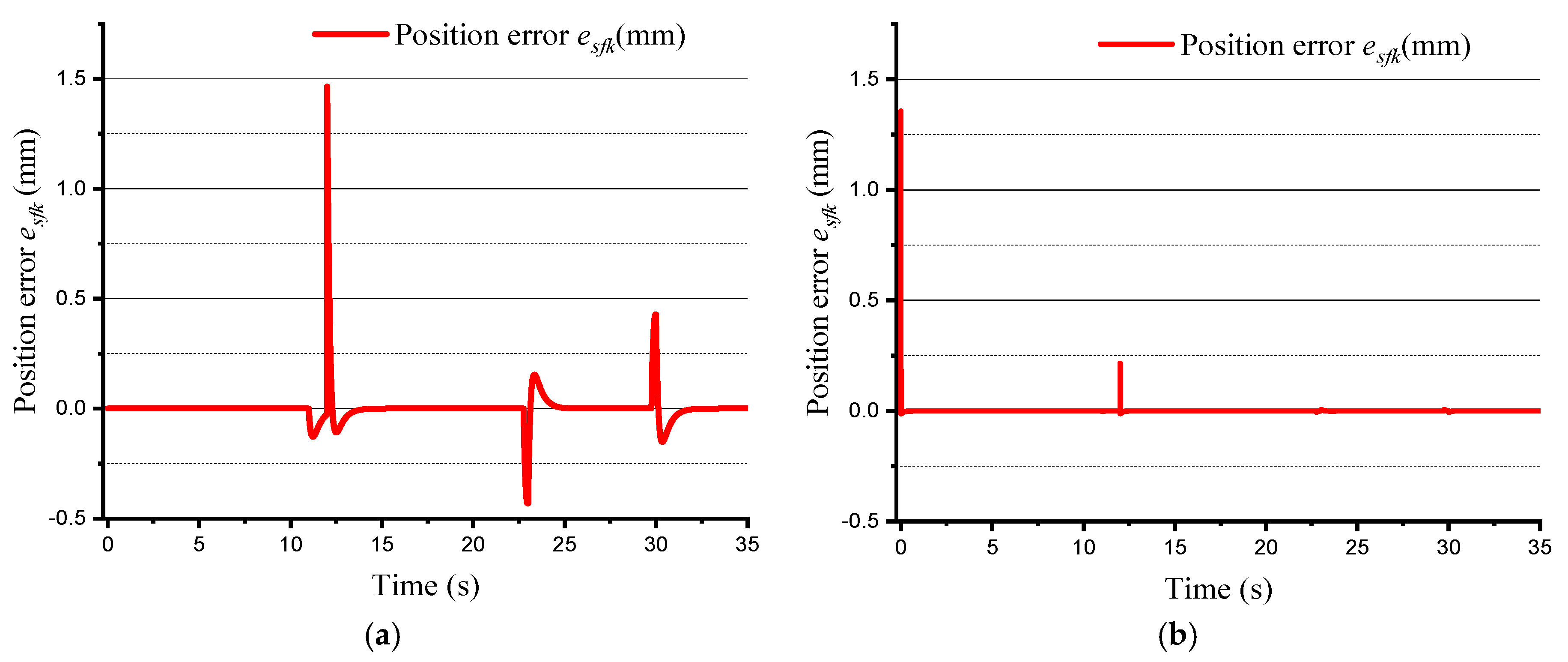
5.2. Simulation Results
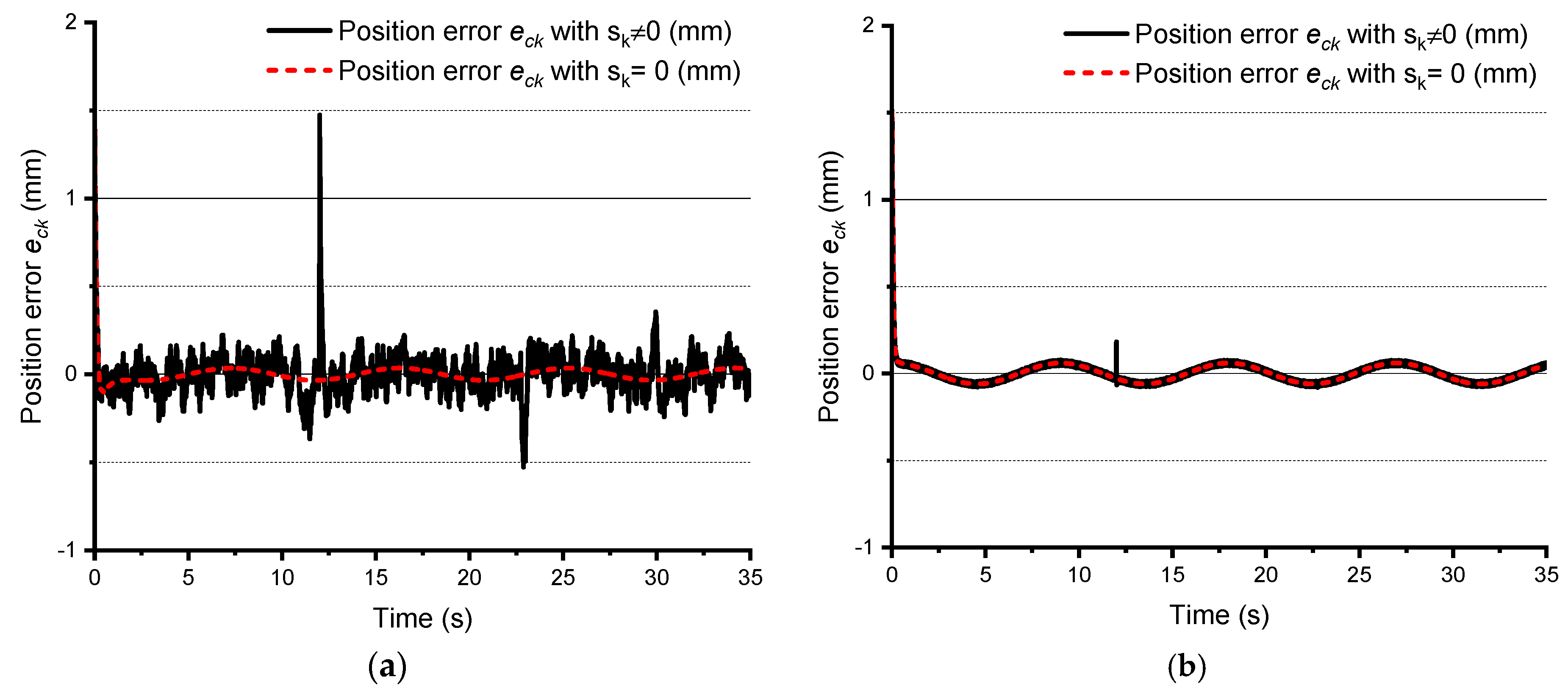
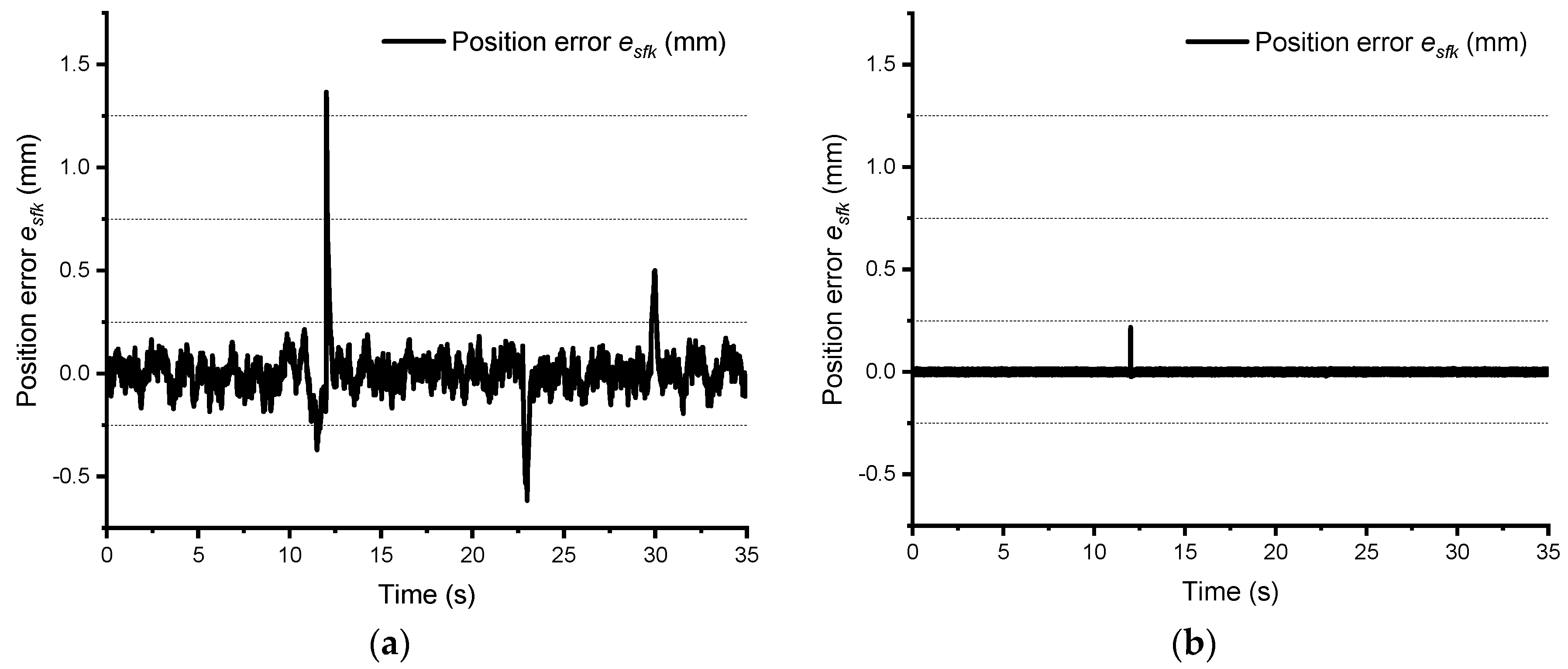
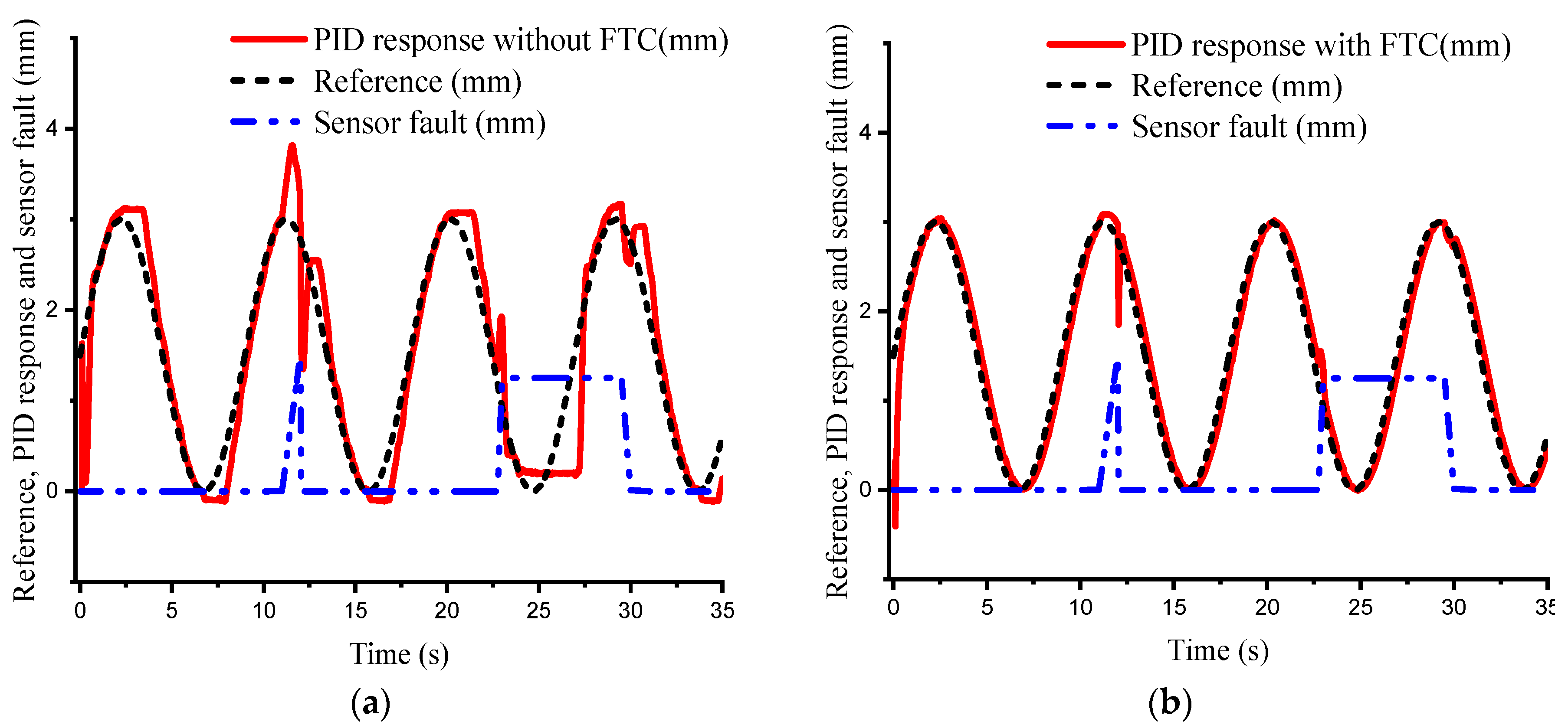
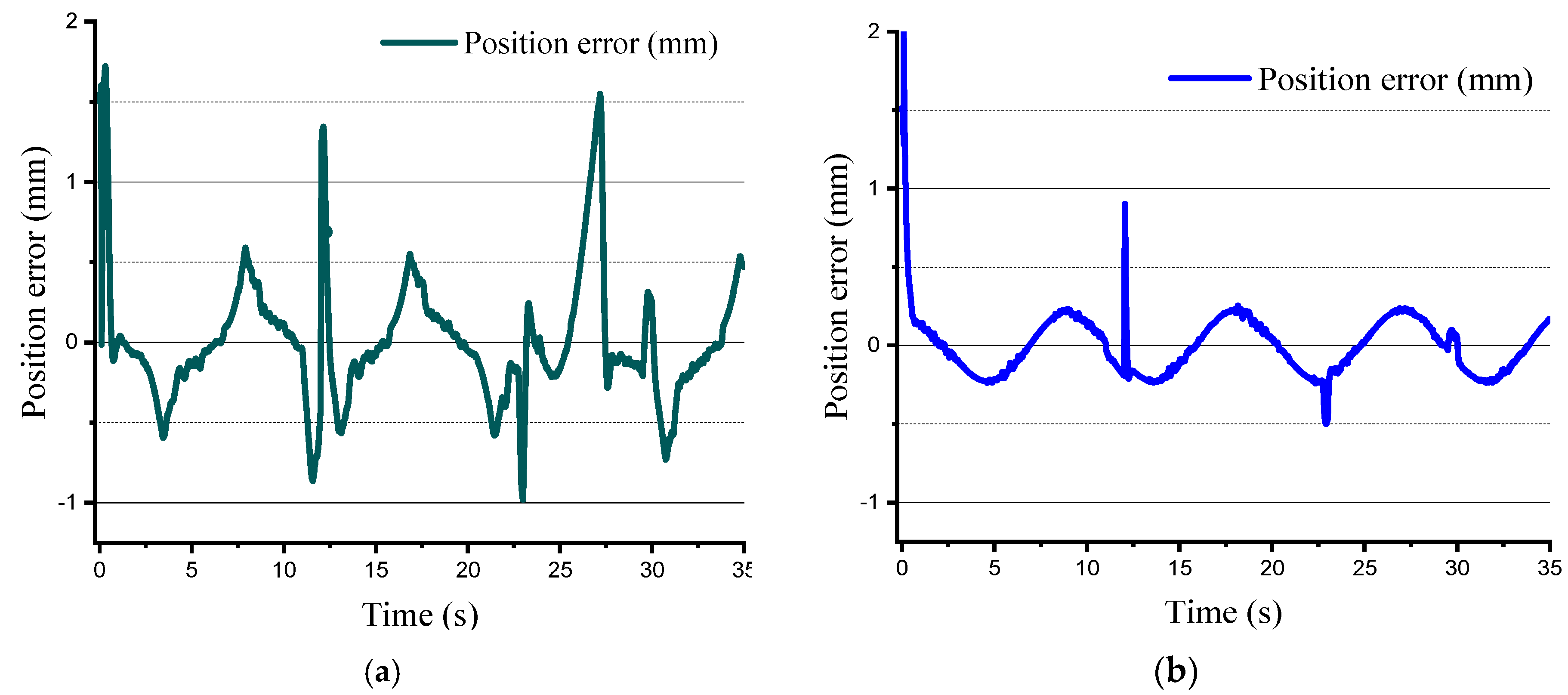
5.3. Experimental Results
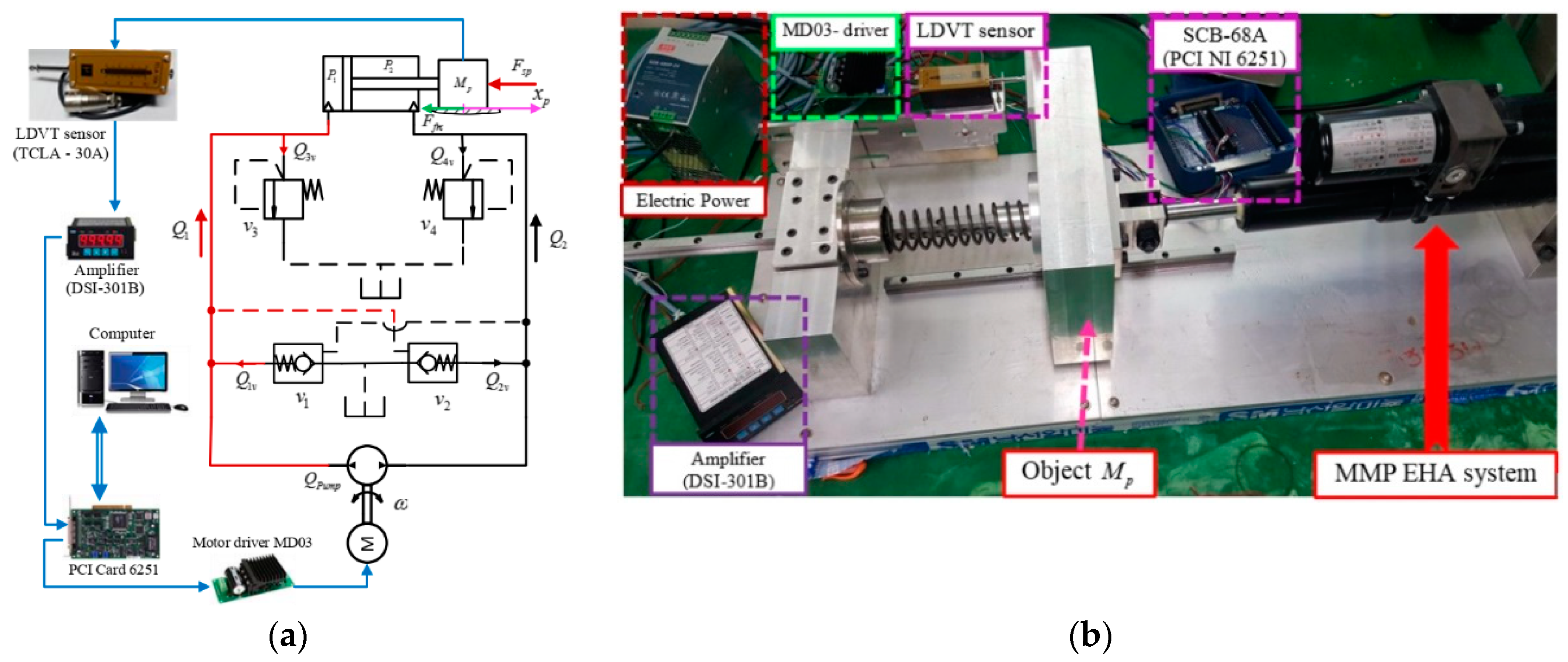
5.3.1. Diagram of the Testbed for the MMP System
5.3.2. Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Samer, A.; Elmira, A.; Abdellatif, A.; Fethi, B.O.H.; Salem, A.N. Modeling and Simulation of a New Integrated Electrohydraulic Actuator for Humanoid Robots. Int. J. Adv. Robot. Automn. 2016, 1, 1–12. [Google Scholar] [CrossRef]
- Xiang, L.; Zhen, C.Z.; Guang, C.R.; Dong, C.; Gang, S. Force Loading Tracking Control of an Electro-Hydraulic Actuator Based on a Nonlinear Adaptive Fuzzy Back-stepping Control Scheme. Symmetry 2018, 10, 155. [Google Scholar] [CrossRef]
- Ahn, K.K.; Nam, C.N.D.; Jin, M. Adaptive Back-stepping Control of an Electrohydraulic Actuator. IEEE/ASME Trans. Mechatron. 2014, 19, 987–995. [Google Scholar] [CrossRef]
- Shi, Z.; Tang, Z.; Pei, Z. Sliding Mode Control for Electro-hydrostatic Actuator. J. Control Sci. Eng. 2014, 2014. [Google Scholar] [CrossRef]
- Marzat, J.; Piet-Lahanier, H.; Damongeot, F.; Walter, E. Model-based fault diagnosis for aerospace systems: A survey. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 2012, 226, 1329–1360. [Google Scholar] [CrossRef]
- Mahulkar, V.; Adams, D.E.; Derriso, M. Adaptive fault tolerant control for hydraulic actuators. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 2242–2247. [Google Scholar] [CrossRef]
- Liu, H.; Liu, D.; Lu, C.; Wang, X. Fault diagnosis of hydraulic servo system using the unscented Kalman filter. Asian J. Control 2014, 16, 1713–1725. [Google Scholar] [CrossRef]
- Qingxian, J.; Huayi, L.; Yingchun, Z.; Xueqin, C. Robust observer-based sensor fault reconstruction for discrete-time systems via a descriptor system approach. Int. J. Control Autom. Syst. 2015, 13, 274. [Google Scholar] [CrossRef]
- Liu, X.; Gao, Z.; Zhang, A. Robust Fault Tolerant Control for Discrete-Time Dynamic Systems with Applications to Aero Engineering Systems. IEEE Access 2018, 6, 18832–18847. [Google Scholar] [CrossRef]
- Siti, F.A.L.; Abdul, R.H.; Mohamad, N.A.; Zaharuddin, M. Fault-Tolerant Control for Sensor Fault of a Single-Link Flexible Manipulator System. J. Teknol. 2016, 78, 6–13. [Google Scholar] [CrossRef][Green Version]
- Noura, H.; Theilliol, D.; Ponsart, J.C.; Chamseddine, A. Fault-Tolerant Control Systems Design, and Practical Applications; Michael, J.G., Michael, A.J., Eds.; Springer: Dordrecht, The Netherlans; Heidelberg, Germany; London, UK; New York, NY, USA, 2009; ISBN 978-1-84882-652-6. [Google Scholar] [CrossRef]
- Nahian, S.A.; Truong, D.Q.; Chowdhury, P.; Das, D.; Ahn, K.K. Modeling and Fault Tolerant Control of an ElectroHydraulic Actuator. Int. J. Precis. Eng. Manuf. 2016, 17, 1285–1297. [Google Scholar] [CrossRef]
- Bahareh, P.; Nader, M.; Khashayar, K. Sensor Fault Detection, Isolation, and Identification Using Multiple Model-based Hybrid Kalman Filter for Gas Turbine Engines. IEEE Trans. Control Syst. Technol. 2016, 24, 1184–1200. [Google Scholar] [CrossRef]
- Fikret, C.; Chingiz, H. Active Fault-Tolerant Control of UAV Dynamics against Sensor-Actuator Failures. J. Aerosp. Eng. 2016, 29, 04016012. [Google Scholar] [CrossRef]
- Gao, Z.; Breikin, T.; Wang, H. High-gain estimator and fault-tolerant design with application to a gas turbine dynamic system. IEEE Trans. Control Syst. Technol. 2007, 15, 740–753. [Google Scholar] [CrossRef]
- Liu, X.; Gao, Z. Unknown input observers for fault diagnosis in Lipschitz nonlinear systems. In Proceedings of the 2015 IEEE International Conference on Mechatronics Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 1555–1560. [Google Scholar] [CrossRef]
- Noura, H.; Sauter, D.; Hamelin, F.; Theilliol, D. Fault-tolerant control in dynamic systems: Application to a winding machine. IEEE Control Syst. Mag. 2000, 20, 33–49. [Google Scholar] [CrossRef]
- Han, W.; Zhang, Y.; Wang, Z.; Shen, Y. Robust fault estimation and accommodation for discrete-time Takagi-Sugeno fuzzy systems. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 3076–3081. [Google Scholar] [CrossRef]
- Tabatabaeipour, M.; Bak, T. Robust observer-based fault estimation and accommodation of discrete-time piecewise linear systems. J. Frankl. Inst. 2013, 351, 277–295. [Google Scholar] [CrossRef]
- Gao, Z. Fault Estimation and Fault-Tolerant Control for Discrete-Time Dynamic Systems. IEEE Trans. Ind. Electron. 2015, 62, 3874–3884. [Google Scholar] [CrossRef]
- Shyamapda, M.; Sairam, N.; Sridhar, S.; Swaminathan, P. Nuclear power plant sensor fault detection using singular value decomposition-based method. Indian Acad. Sci. 2017, 42, 1473–1480. [Google Scholar] [CrossRef]
- Jing, H.; Lin, M.; Songan, M.; Changfan, Z.; Houguang, C. Fault-Tolerant Control of a Nonlinear System Actuator Fault Based on Sliding Mode Control. J. Control Sci. Eng. 2017. [Google Scholar] [CrossRef]
- Jian, Z.; Akshya, K.S.; Sing, K.N. Robust Observer-Based Fault Diagnosis for Nonlinear Systems Using MATLAB. In Advances in Industrial Control; Michael, J.G., Michael, A.J., Eds.; Springer International Publishing: Switzerland, 2016; ISBN 978-3-319-32323-7. [Google Scholar] [CrossRef]
- Hmidi, R.; Brahim, A.B.; Hmida, F.B.; Sellami, A. Robust fault tolerant control for Lipschitz nonlinear systems with simultaneous actuator and sensor faults. In Proceedings of the 2018 International Conference on Advanced Systems Electric Technologies (IC_ASET), Hammamet, Tunisia, 22–25 March 2018; pp. 277–283. [Google Scholar] [CrossRef]
- Shen, Q.; Jiang, B.; Shi, P. Fault Diagnosis and Fault-Tolerant Control Based on Adaptive Control Approach; Springer International Publishing AG: Cham, Switzerland, 2017; ISBN 978-3-319-52529-7. [Google Scholar] [CrossRef]
- Robert, F.; David, H.; Catherine, C.; Eric, B. A Class of Nonlinear Unknown Input Observer for Fault Diagnosis: Application to Fault Tolerant Control of an Autonomous Spacecraft. In Proceedings of the 10th UKACC International Conference on Control (IEEE), Loughborough, UK, 9–11 July 2014; pp. 19–24. [Google Scholar] [CrossRef]
- Gao, Z.; Ding, S.X. Sensor fault reconstruction and sensor compensation for a class of nonlinear state-space systems via a descriptor system approach. IET Control Theory Appl. 2007, 1, 578–585. [Google Scholar] [CrossRef]
- Gao, Z.; Breikin, T.; Wang, H. Reliable Observer-Based Control Against Sensor Failures for Systems with Time Delays in Both State and Input. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2008, 38, 1018–1029. [Google Scholar] [CrossRef]
- Tan, N.V.; Cheolkeun, H. Sensor Fault-Tolerant Control Design for Mini Motion Package Electro-Hydraulic Actuator. MDPI Process. 2019, 7, 89. [Google Scholar] [CrossRef]
- Sami, M.; Patton, J.R. Active fault tolerant control for nonlinear systems with the simultaneous actuator and sensor faults. Int. J. Control Autom. Syst. 2013, 11, 1149. [Google Scholar] [CrossRef]
- Gao, Z.; Liu, X.; Chen, Q.Z.M. Unknown Input Observer-Based Robust Fault Estimation for Systems Corrupted by Partially Decoupled Disturbances. IEEE Trans. Ind. Electron. 2016, 63, 2537–2547. [Google Scholar] [CrossRef]
- Boyd, S.; Ghaoui, E.L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in Systems and Control Theory; SIAM: Philadelphia, PA, USA, 1994; ISBN 0-89871-334-X. [Google Scholar]
- Zhang, J.; Zhao, X.; Zhu, F.; Karimi, H. Reduced-Order Observer Design for Switched Descriptor Systems with Unknown Inputs. IEEE Trans. Autom. Control 2019. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, F.; Karimi, H.R.; Wang, F. Observer-based Sliding Mode Control for T-S Fuzzy Descriptor Systems with Time-delay. IEEE Tran. Fuzzy Syst. 2019. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Values | Units |
|---|---|---|
| Ah | 0.0013 | m2 |
| Ar | 9.4 × 10-4 | m2 |
| Vch | 2.09 × 10-4 | m3 |
| Vcr | 4.0065 × 10-5 | m3 |
| mp | 10 | kg |
| 2.9 × 108 | Pa | |
| 2383 | Nm | |
| ρ | 870 | Kg/m3 |
| Dp | 2.5 × 10−6 | m3 |
| Content | Without FTC | With FTC | ||||||
|---|---|---|---|---|---|---|---|---|
| From 0.1 s to 15 s | 1.424 | 5.06 | 1.450 | 3.30 | 0.175 | 88.33 | 0.185 | 87.65 |
| From 15 s to 25 s | 0.431 | 65.53 | 0.608 | 51.40 | 0.041 | 96.71 | 0.062 | 95.07 |
| From 25 s to 35 s | 0.388 | 68.97 | 0.480 | 61.57 | 0.139 | 92.98 | 0.062 | 95.03 |
| Average error performance from 0.1s to 35s | - | 46.52 | - | 38.77 | - | 92.67 | - | 92.58 |
| Content | Without FTC | With FTC | ||||||
|---|---|---|---|---|---|---|---|---|
| From 0. 1 s to 15 s | 1.464 | 2.37 | 1.490 | 0.61 | 0.215 | 85.64 | 0.225 | 84.95 |
| From 15 s to 25 s | 0.431 | 65.49 | 0.609 | 51.30 | 0.006 | 99.54 | 0.023 | 98.15 |
| From 25 s to 35 s | 0.428 | 65.75 | 0.521 | 58.31 | 0.006 | 99.54 | 0.022 | 98.24 |
| Average error performance from 0.1 s to 35 s | - | 44.53 | - | 36.74 | - | 94.91 | - | 93.78 |
| Content | Sinusoidal Reference Signal | |||
|---|---|---|---|---|
| Without FTC | With FTC | |||
| From 0.5 s to 15 s | 1.721 | −4.74 | 0.903 | 39.80 |
| From 15 s to 25 s | 0.979 | 21.64 | 0.254 | 59.99 |
| From 25 s to 35 s | 1.550 | −3.96 | 0.254 | 79.68 |
| Average error performance from 0.5 s to 35 s | - | −5.69 | - | 59.82 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van Nguyen, T.; Ha, C. Experimental Study of Sensor Fault-Tolerant Control for an Electro-Hydraulic Actuator Based on a Robust Nonlinear Observer. Energies 2019, 12, 4337. https://doi.org/10.3390/en12224337
Van Nguyen T, Ha C. Experimental Study of Sensor Fault-Tolerant Control for an Electro-Hydraulic Actuator Based on a Robust Nonlinear Observer. Energies. 2019; 12(22):4337. https://doi.org/10.3390/en12224337
Chicago/Turabian StyleVan Nguyen, Tan, and Cheolkeun Ha. 2019. "Experimental Study of Sensor Fault-Tolerant Control for an Electro-Hydraulic Actuator Based on a Robust Nonlinear Observer" Energies 12, no. 22: 4337. https://doi.org/10.3390/en12224337
APA StyleVan Nguyen, T., & Ha, C. (2019). Experimental Study of Sensor Fault-Tolerant Control for an Electro-Hydraulic Actuator Based on a Robust Nonlinear Observer. Energies, 12(22), 4337. https://doi.org/10.3390/en12224337