Adaptive Robust Simultaneous Stabilization of Two Dynamic Positioning Vessels Based on a Port-Controlled Hamiltonian (PCH) Model


Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Problem Formulation and Preliminaries
2.1. Some Lemmas
2.2. Dynamic Model of Ship
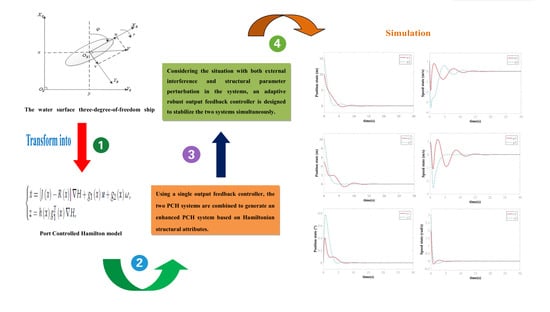
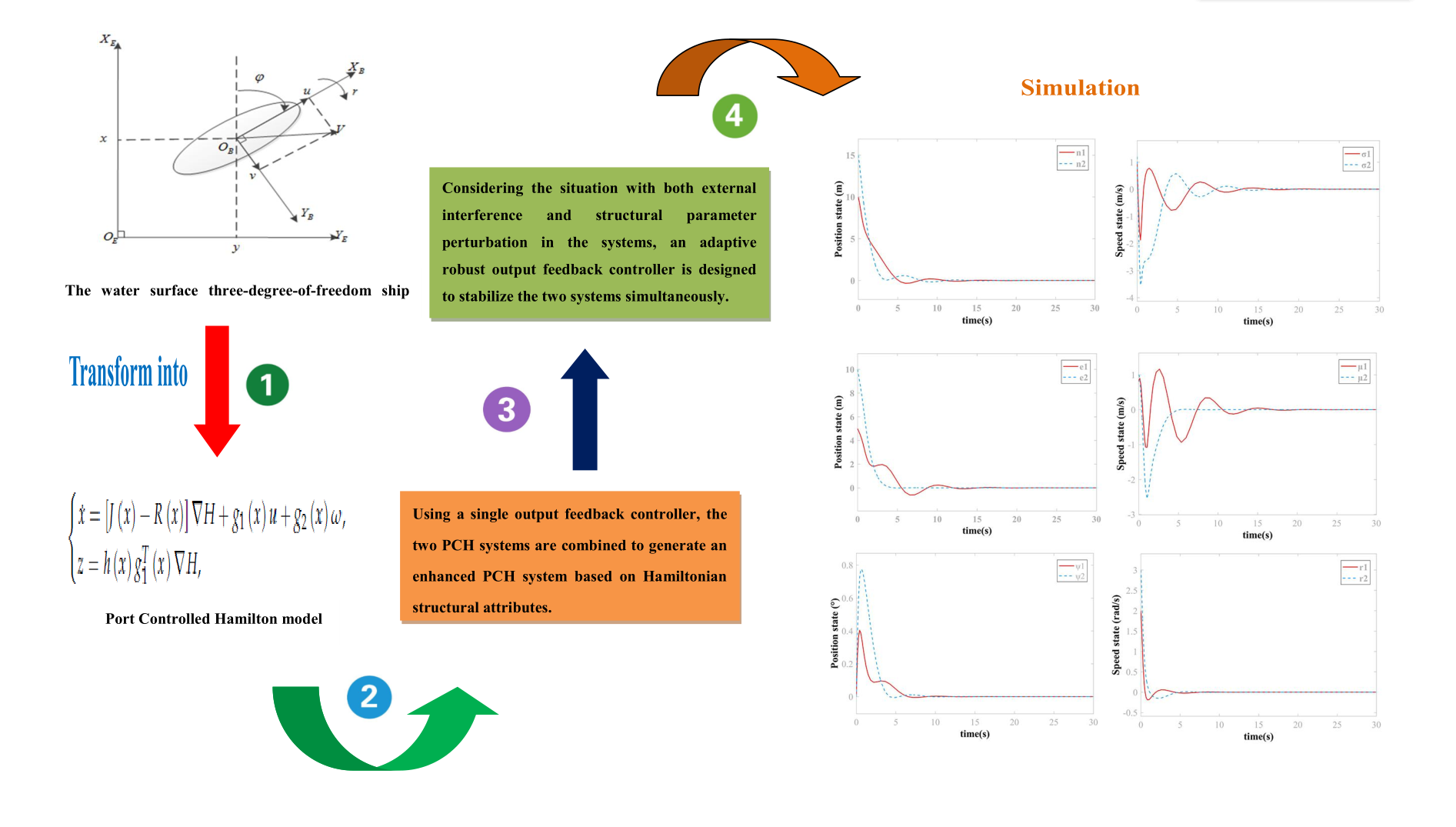
3. Adaptive Robust Simultaneous Stabilization
3.1. Simultaneous Stabilization
3.2. Adaptive Simultaneous Stabilization
- (i)
- there exists a symmetric matrix such thatwhere ;
- (ii)
- there exists a matrix Φ with appropriate dimension such thatwhere , θ is an unknown constant vector related to and .
3.3. Adaptive Robust Simultaneous Stabilization
- (a)
- (b)
- The gain (from to z ) of the closed-loop system is not greater than the given .
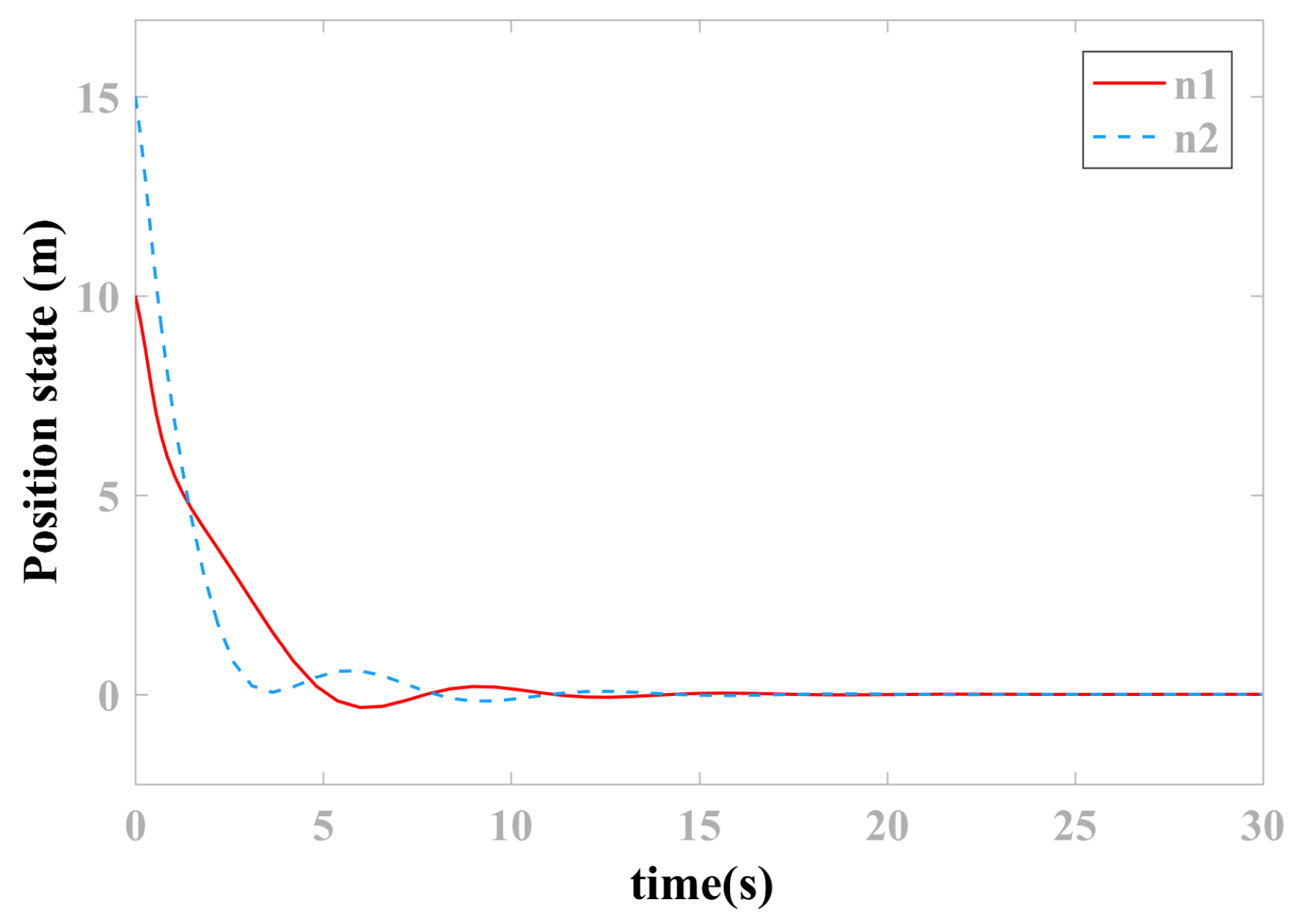
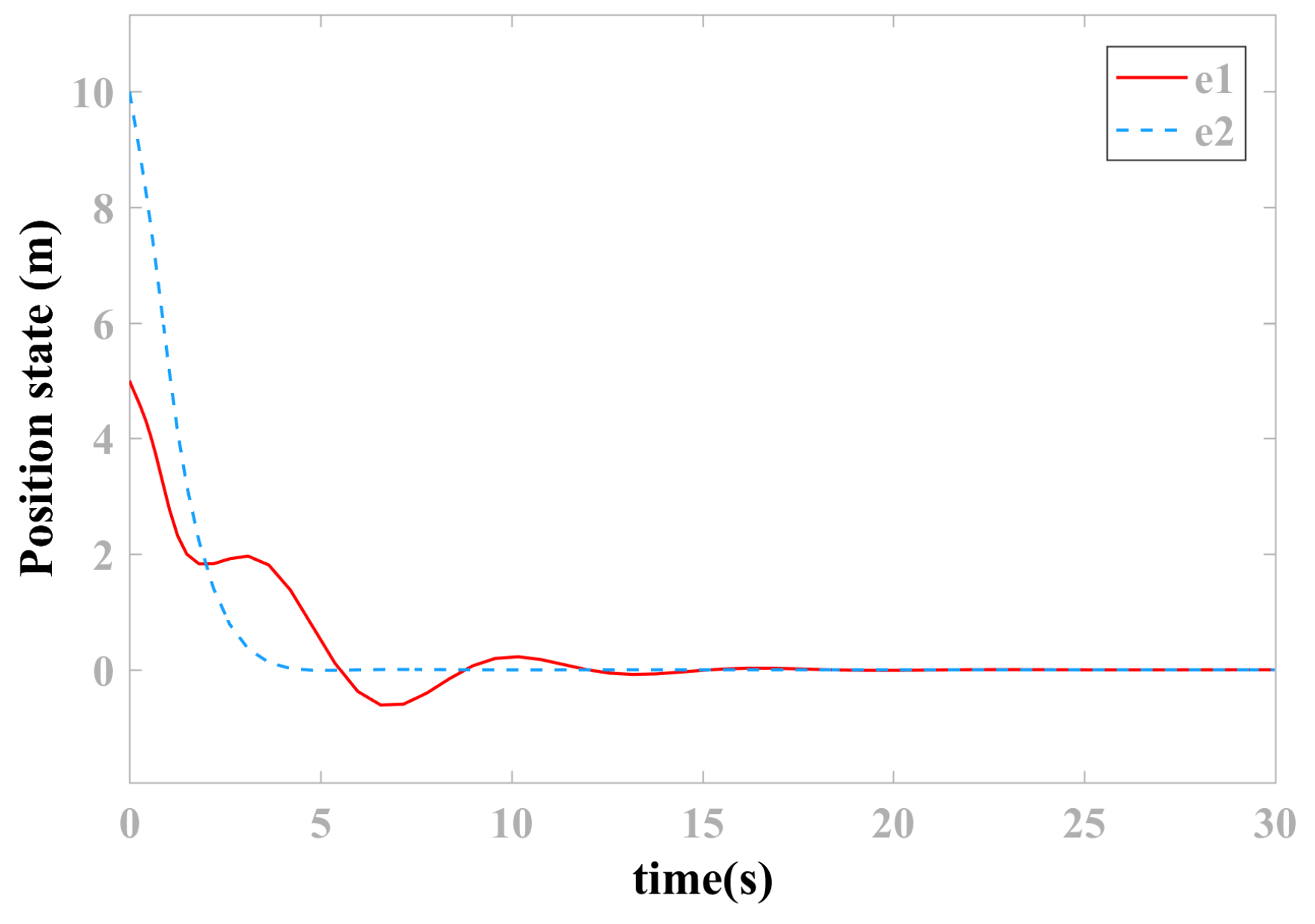
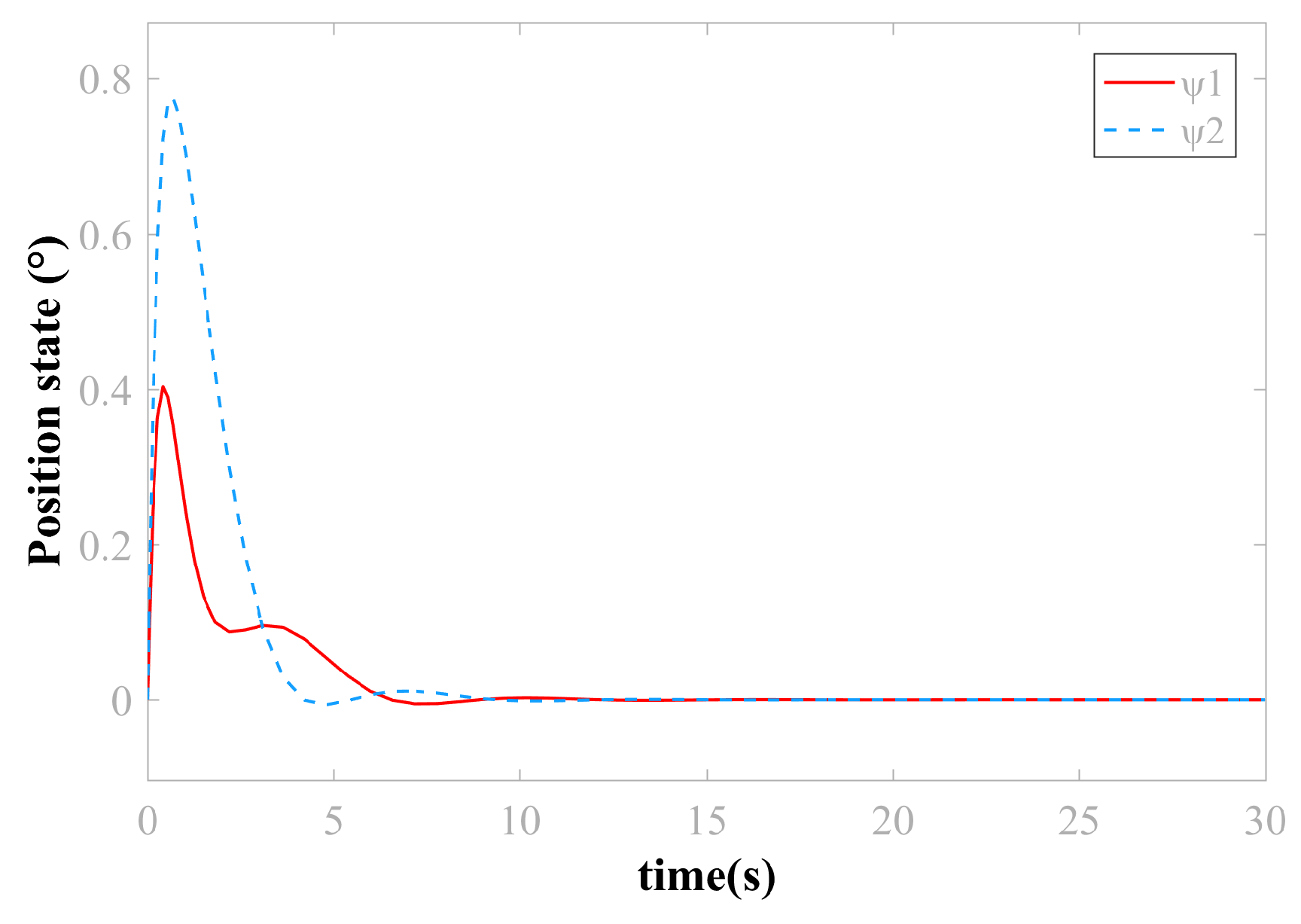
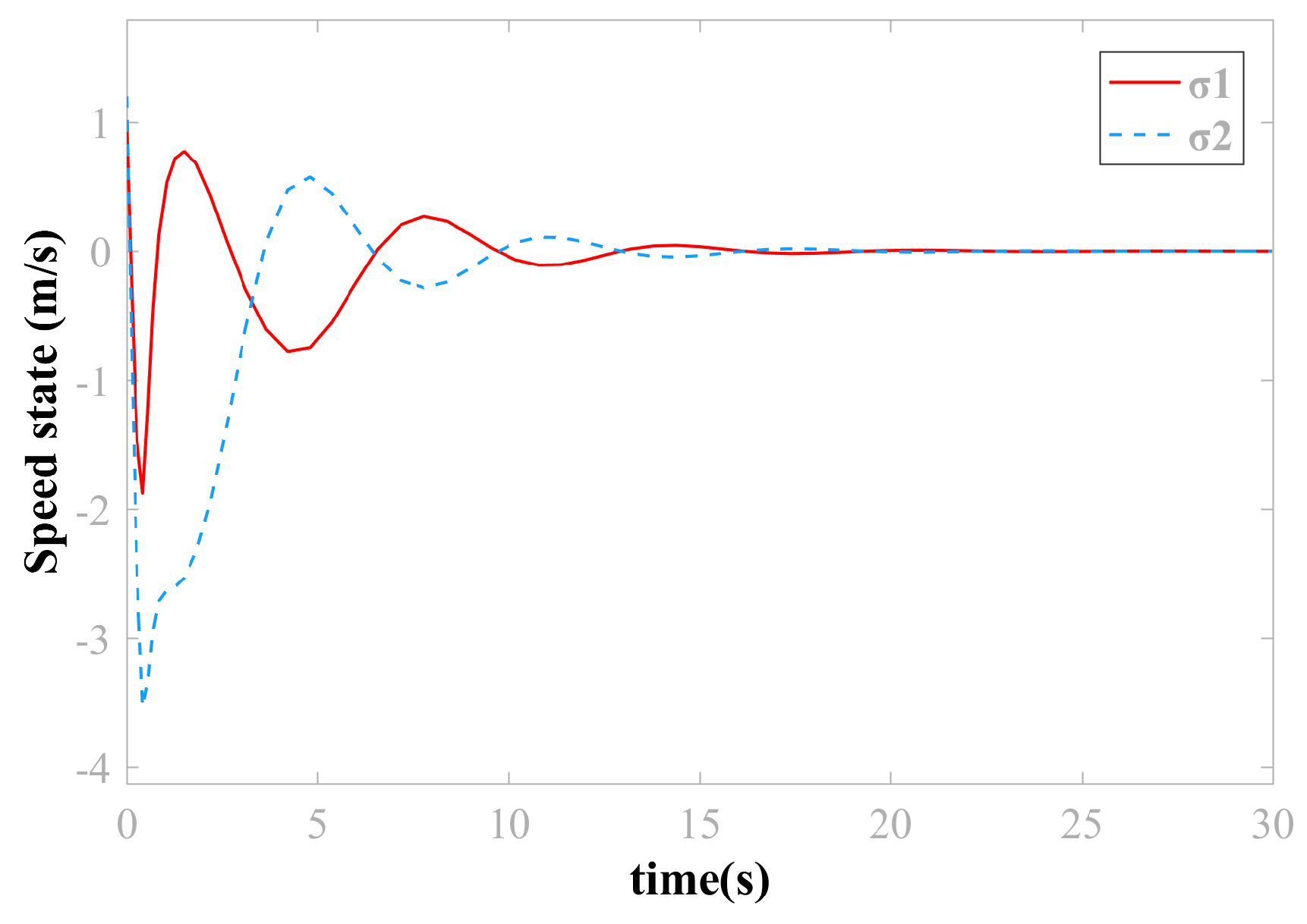
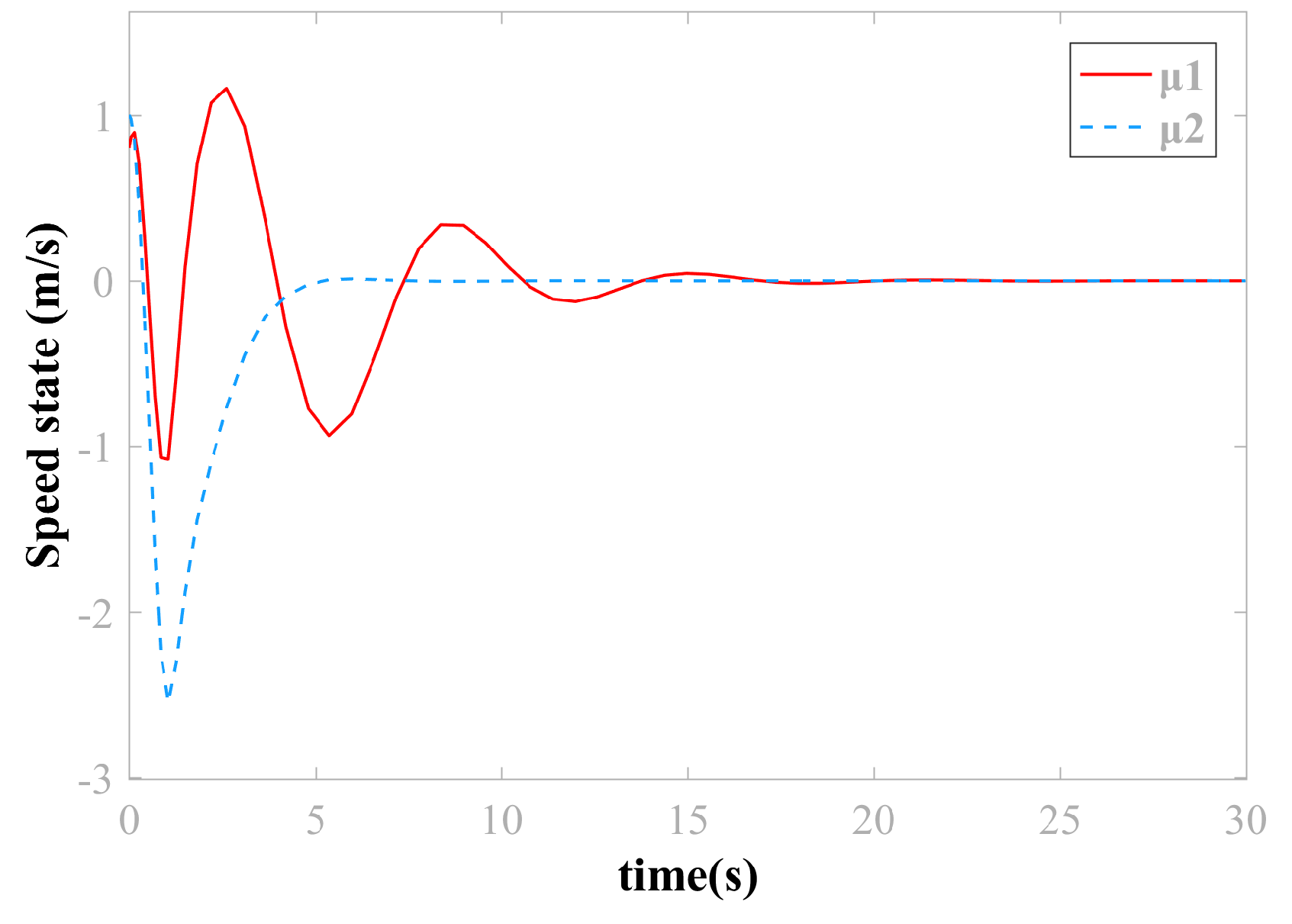
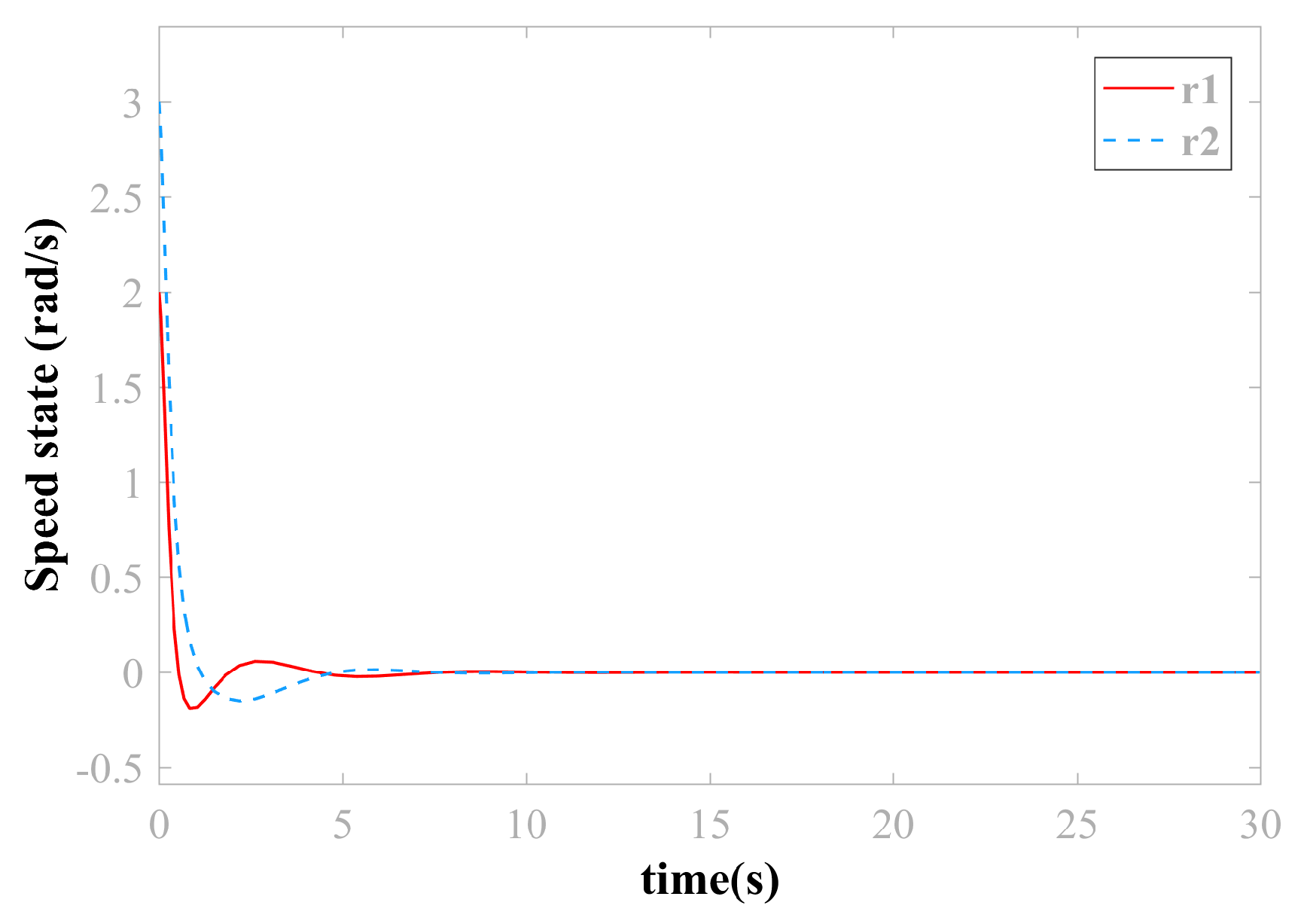
4. Simulation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bian, X.; Fu, M.; Wang, Y. Ship Dynamic Positioning; Science Press: Beijing, China, 2011; pp. 1–13. [Google Scholar]
- Ding, X. Ship Dynamic Positioning Control System; Dalian Maritime University Press: Dalian, China, 2017; pp. 1–30. [Google Scholar]
- Jiao, J.; Wang, G.; Gu, Y.; Sun, X. Coordinated Formation Control of Dynamically Positioned Ships; Electronic Industry Press: Beijing, China, 2017; pp. 1–20. [Google Scholar]
- Wang, B. Robust Adaptive Formation Control for Multiple Dynamic Positioning Vessels. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2017. [Google Scholar]
- Wang, S. Research on Consistency Theory of Multi-Dynamic Positioning Vessels. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2014. [Google Scholar]
- Li, Y.; Xu, F.; Xie, G. Overview of the development and application of multi-agent technology. Comput. Eng. Appl. 2018, 54, 13–21. [Google Scholar]
- Xu, G. Research on Unified Multi-Agent System and Formation Control Design. Ph.D. Thesis, Taiyuan University, Taiyuan, China, 2018. [Google Scholar]
- Chen, G. Study on the Stabilization Control of Underactuated Surface Vessels. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2014. [Google Scholar]
- Kang, Z.; Zou, J.; Fang, L. Design of a motion stabilization controller for a fully driven ship. SHIP BOAT 2018, 29, 51–58. [Google Scholar]
- Muhammad, S.; DoRia-Cerezo, A. Passivity-based control applied to the dynamic positioning of ships. IET Control Theory Appl. 2012, 6, 680–688. [Google Scholar] [CrossRef]
- Tu, F.; Ge, S.; Choo, Y.S.; Hang, C.C. Adaptive Dynamic Positioning Control for Accommodation Vessels with Multiple Constraints. IET Control Theory Appl. 2016, 11, 329–340. [Google Scholar] [CrossRef]
- Mao, J. Simultaneous Stabilization and Simultaneous H∞ Control for Uncertain Nonlinear Systems. Ph.D. Thesis, Zhengzhou University, Zhengzhou, China, 2011. [Google Scholar]
- Cai, X.; Gao, H.; Liu, Y. Simultaneous H∞ Stabilization for a Class of Multi-input Nonlinear Systems. Acta Autom. Sin. 2012, 38, 473–478. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Gang, F. Simultaneous stabilization of nonlinear port-controlled Hamiltonian systems via output feedback. J. Shandong Univ. Eng. Sci. 2009, 39, 52–63. [Google Scholar]
- Zhang, J. Simultaneous Stabilization and Control Stydy of Time-delay Systems. Ph.D. Thesis, Inner Mongolia Normal University, Hohhot, China, 2016. [Google Scholar]
- Li, R. Simultaneous Stabilization and Control for Singular Systems with Time-delay. Ph.D. Thesis, Inner Mongolia Normal University, Hohhot, China, 2016. [Google Scholar]
- Liang, Y. Simultaneous Stabilization and Control for Inter-connected Large-scale System with Time-delay. Ph.D. Thesis, Inner Mongolia Normal University, Hohhot, China, 2016. [Google Scholar]
- Wang, Y. Generalized Hamiltonian Control System Theory: Implementation, Control and Application; Science Press: Beijing, China, 2017. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley and Sons Ltd. Press: West Sussex, UK, 2011; pp. 45–58. [Google Scholar]
- Wang, Y.; Gang, F.; Cheng, D. Simultaneous stabilization of a set of nonlinear port-controlled Hamiltonian systems. Automatica 2007, 43, 403–415. [Google Scholar] [CrossRef]
- Yang, R.; Guo, R. Adaptive finite-time robust control of nonlinear delay Hamiltonian systems via Lyapunov-Krasovskii method. Asian J. Control 2018, 20, 1–11. [Google Scholar] [CrossRef]
- Hu, X. Reserch on Nonlinear Control for Dynamic Positioning of Ships. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2018. [Google Scholar]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, P.; Yang, R.; Zhang, G.; Han, Y. Adaptive Robust Simultaneous Stabilization of Two Dynamic Positioning Vessels Based on a Port-Controlled Hamiltonian (PCH) Model. Energies 2019, 12, 3936. https://doi.org/10.3390/en12203936
Zhou P, Yang R, Zhang G, Han Y. Adaptive Robust Simultaneous Stabilization of Two Dynamic Positioning Vessels Based on a Port-Controlled Hamiltonian (PCH) Model. Energies. 2019; 12(20):3936. https://doi.org/10.3390/en12203936
Chicago/Turabian StyleZhou, Pei, Renming Yang, Guangyuan Zhang, and Yaozhen Han. 2019. "Adaptive Robust Simultaneous Stabilization of Two Dynamic Positioning Vessels Based on a Port-Controlled Hamiltonian (PCH) Model" Energies 12, no. 20: 3936. https://doi.org/10.3390/en12203936
APA StyleZhou, P., Yang, R., Zhang, G., & Han, Y. (2019). Adaptive Robust Simultaneous Stabilization of Two Dynamic Positioning Vessels Based on a Port-Controlled Hamiltonian (PCH) Model. Energies, 12(20), 3936. https://doi.org/10.3390/en12203936