Robust Perturbation Observer-based Finite Control Set Model Predictive Current Control for SPMSM Considering Parameter Mismatch

Abstract
:
1. Introduction
2. Modelling for FCS-MPCC
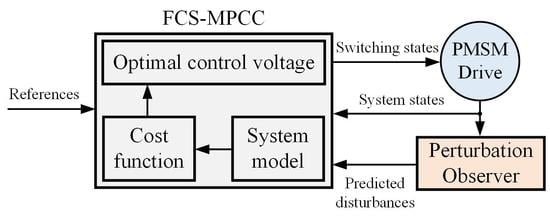
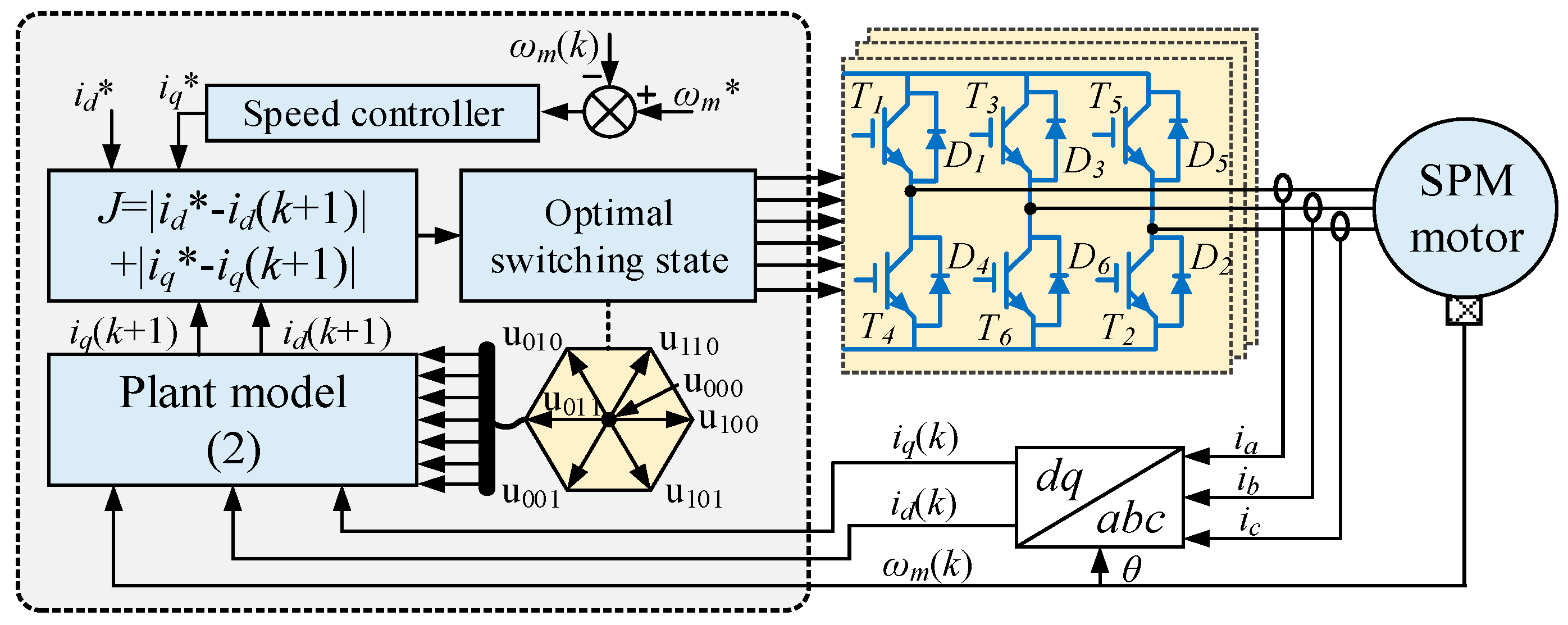
- Measurement and abc/dq transformation: the current and position sensors are used to measure the phase currents (ia, ib and ic), rotor position (θ) and speed ωm(k). Then, the measured currents are transformed to the dq-axis currents (id(k) and iq(k)) according to the real-time rotor position.
- Prediction: use id (k), iq (k) and ωm(k) to estimate the future current states id (k + 1) and iq (k + 1) for all the seven candidate voltage vectors.
- Evaluation: substitute the seven the predicted values into the cost function (5) and determine the optimal voltage vector that minimizes the value of J.where id* and iq* are the reference d- and q-axis currents, respectively.
- Switching state application: apply the corresponding optimum switching state to the drive system.
3. Impacts of Parameter Mismatch on FCS-MPCC Properties
3.1. Analysis on Stability
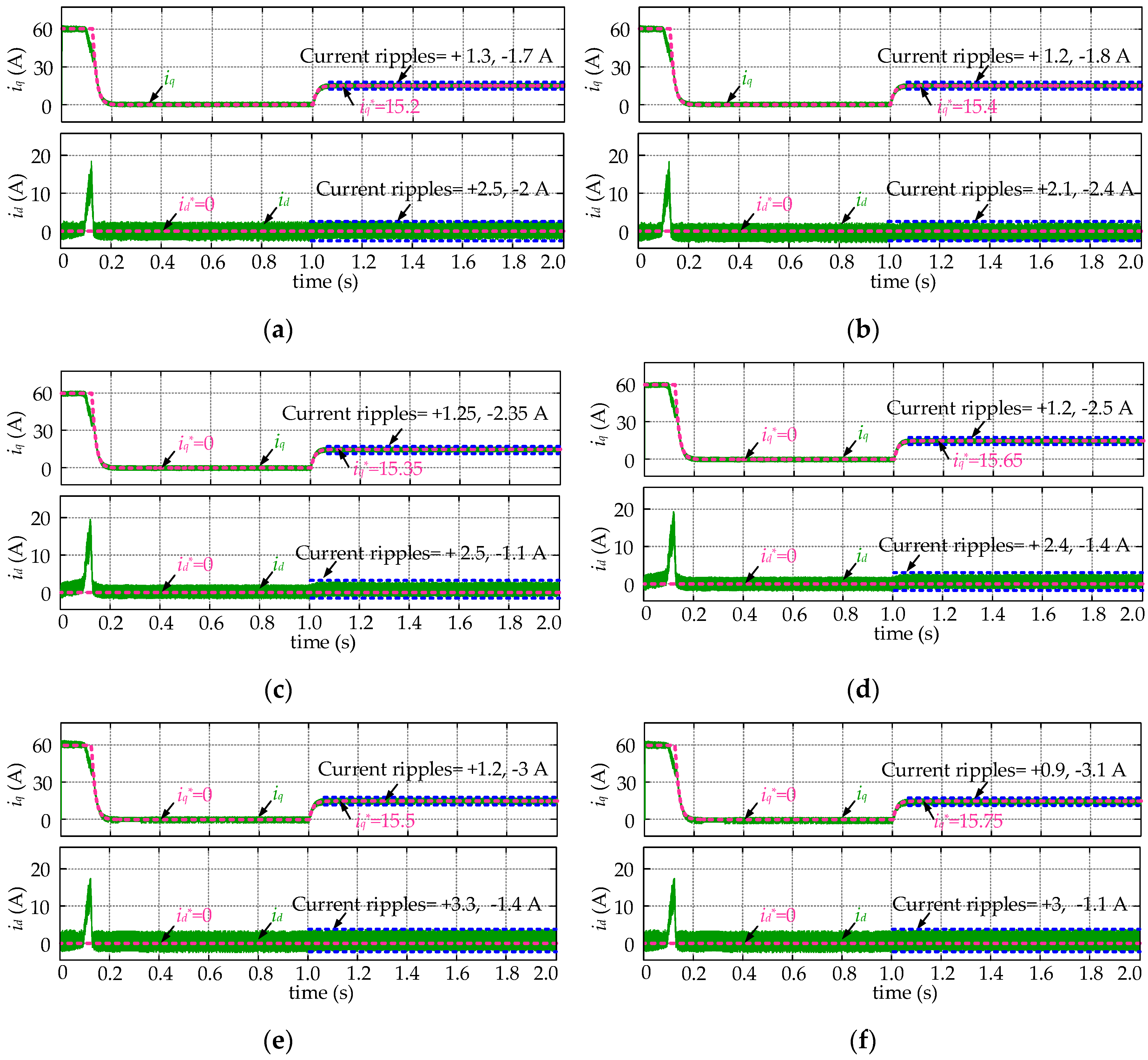
3.2. Analysis on Steady-State Performance
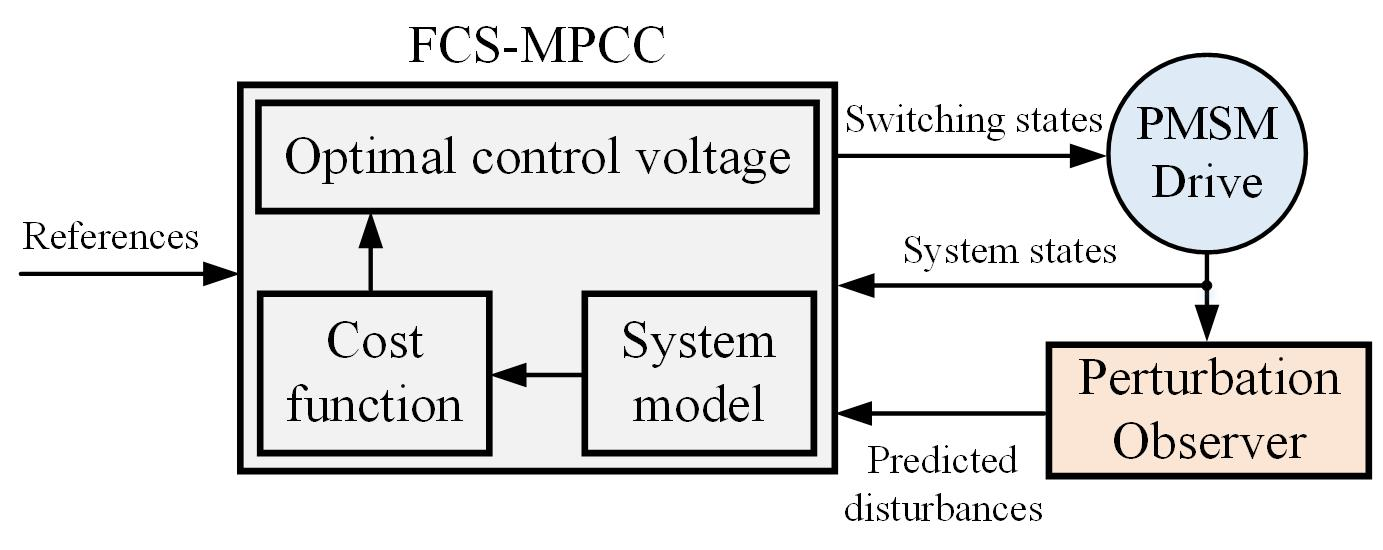
4. Luenberger Perturbation Observer–based FCS-MPCC
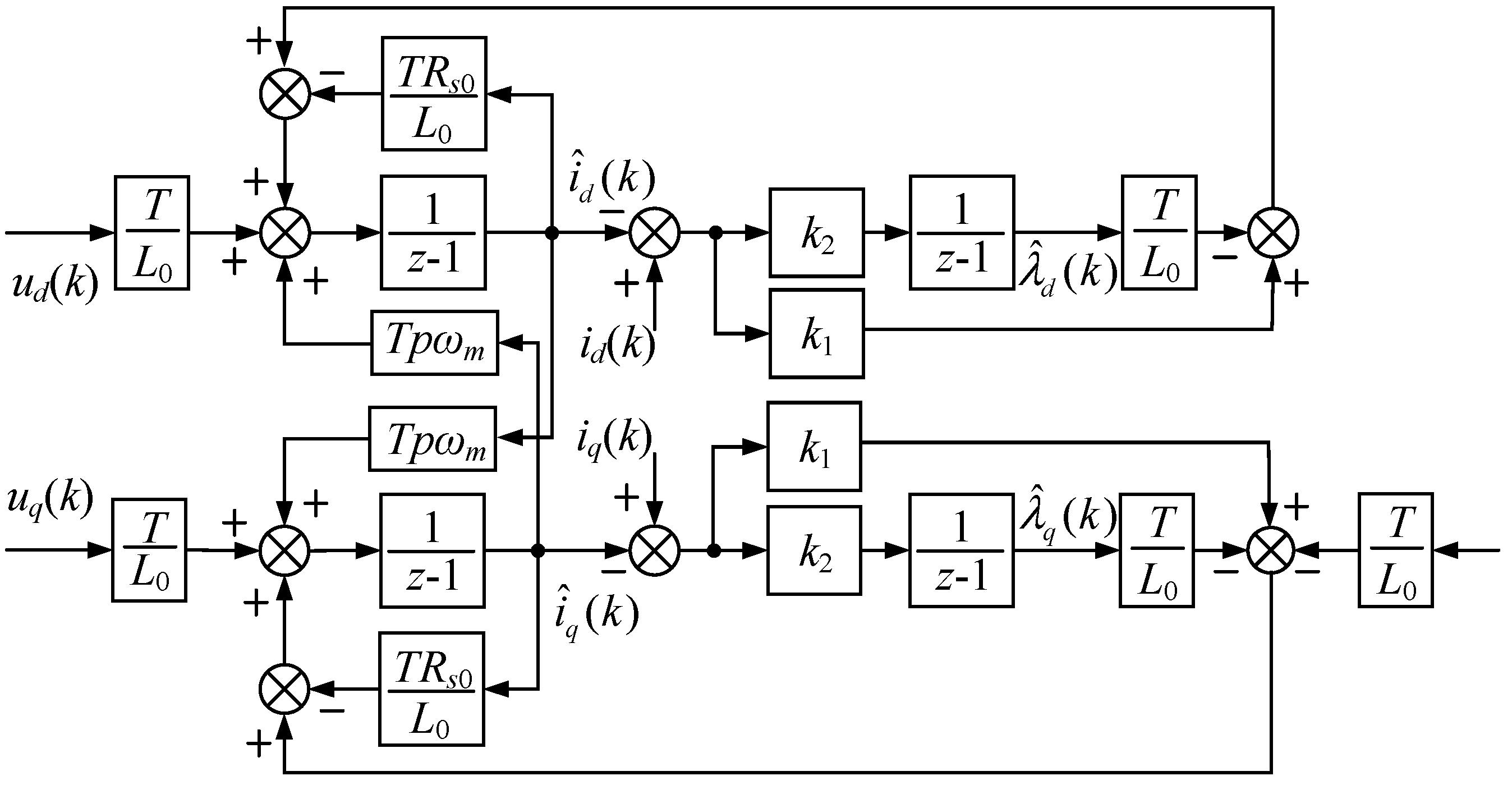
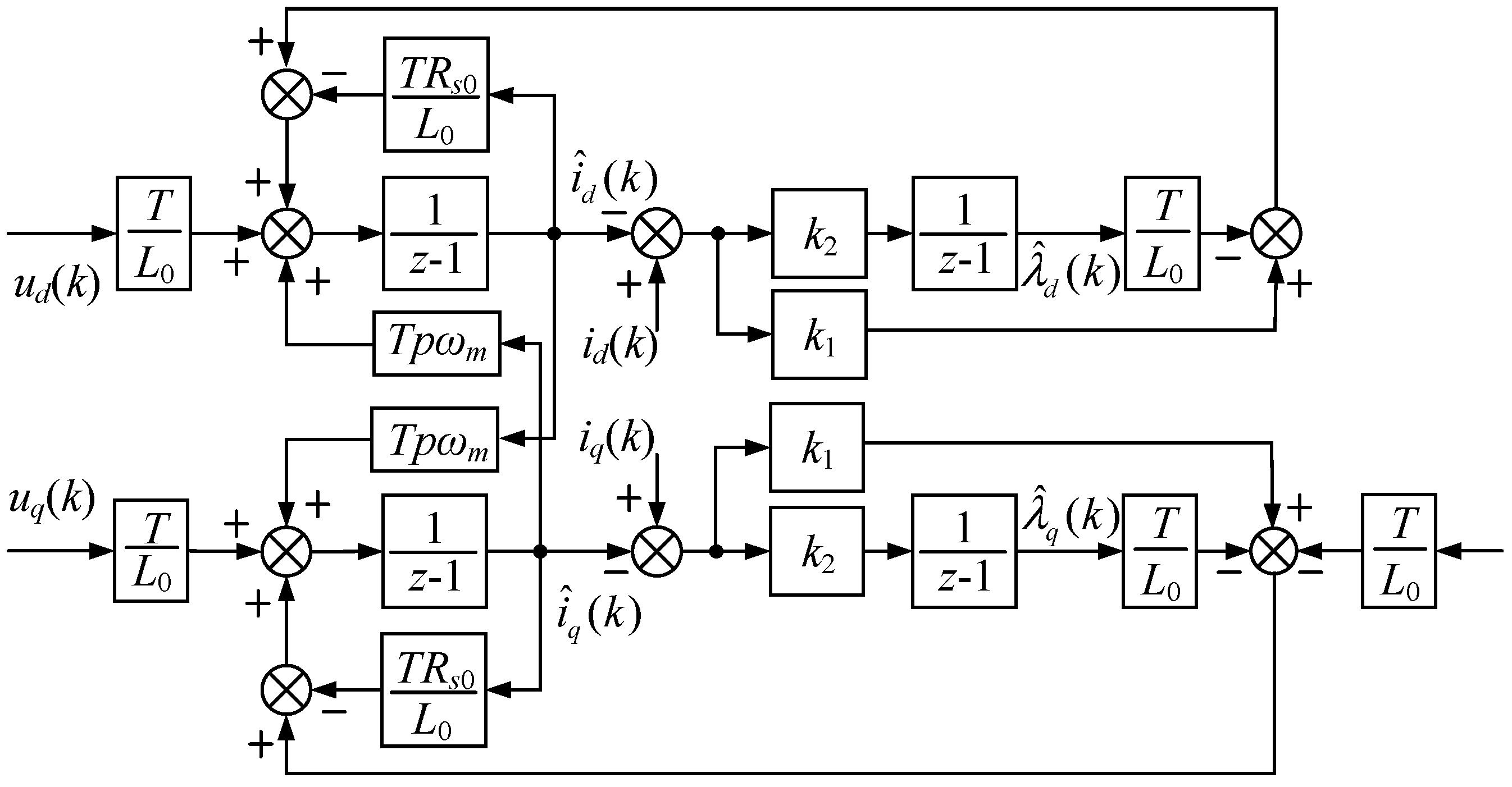
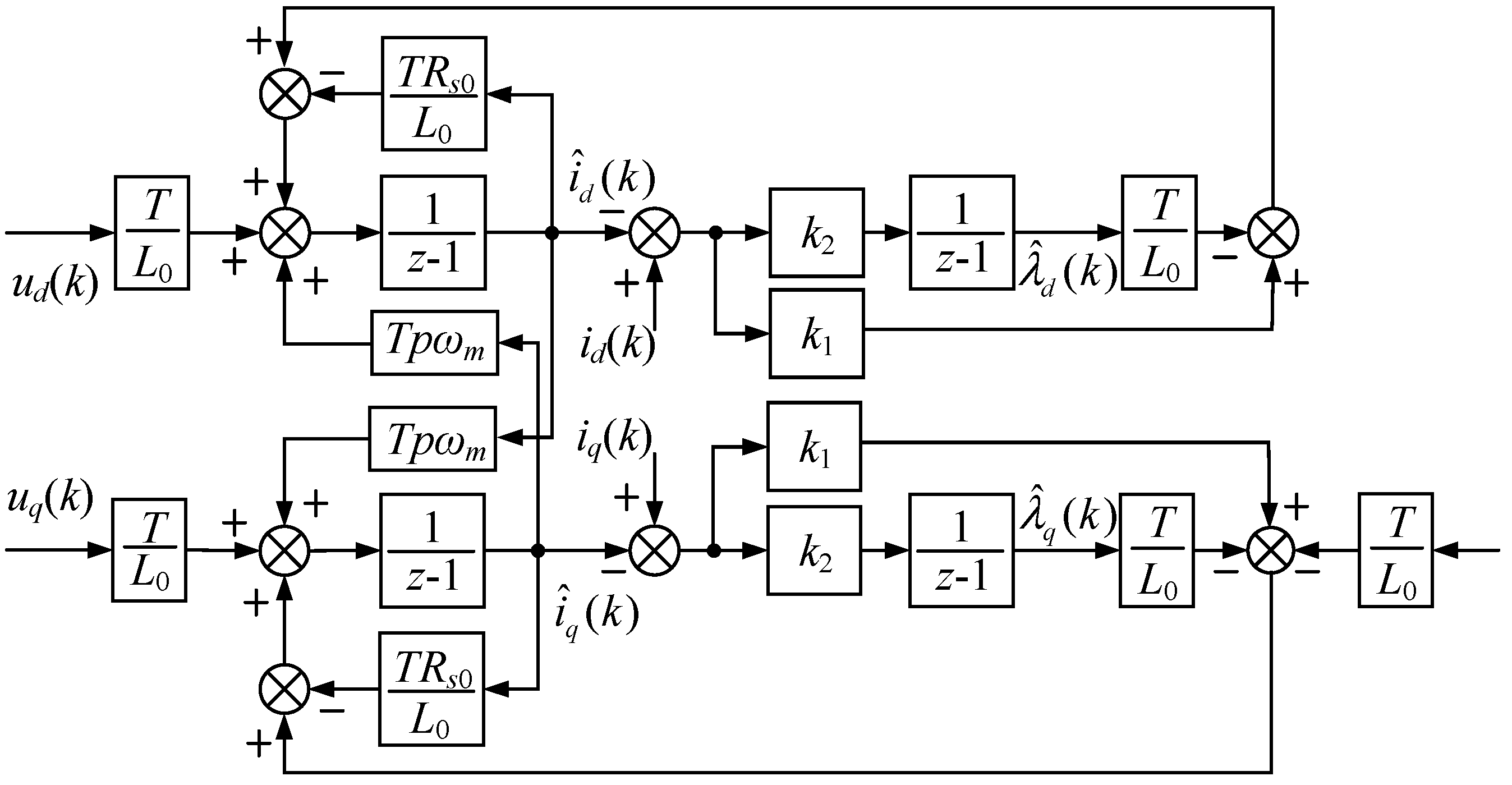
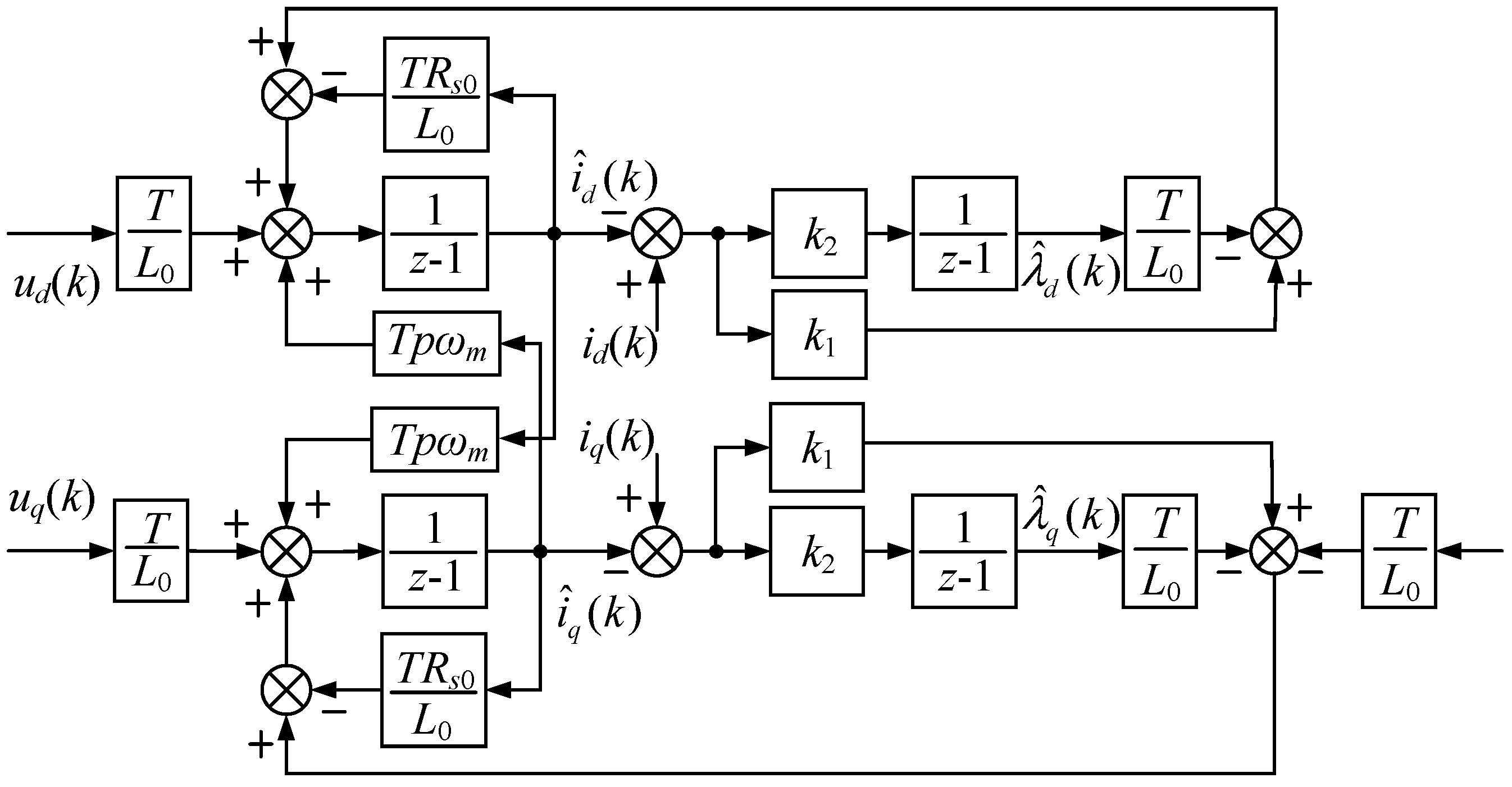
4.1. Design of Luenberger Observer for SPMSM
4.2. Stability Analysis of Observer
4.3. Implementation of Luenberger-based FCS-MPCC
5. Simulation and Experimental Results
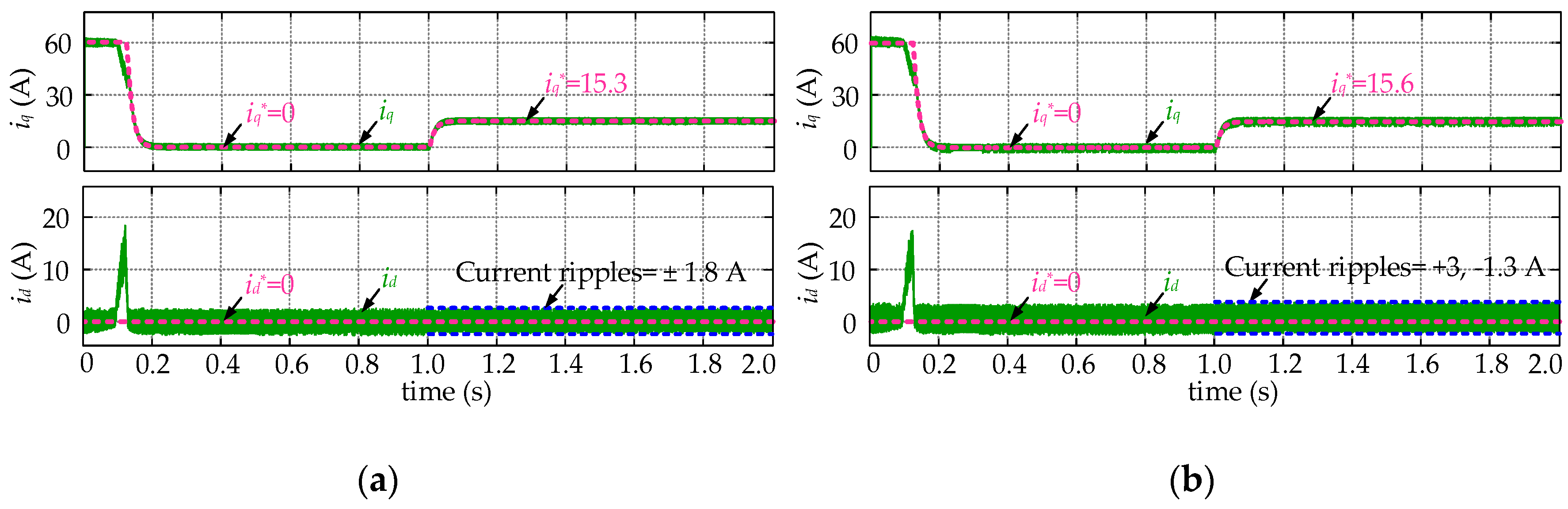
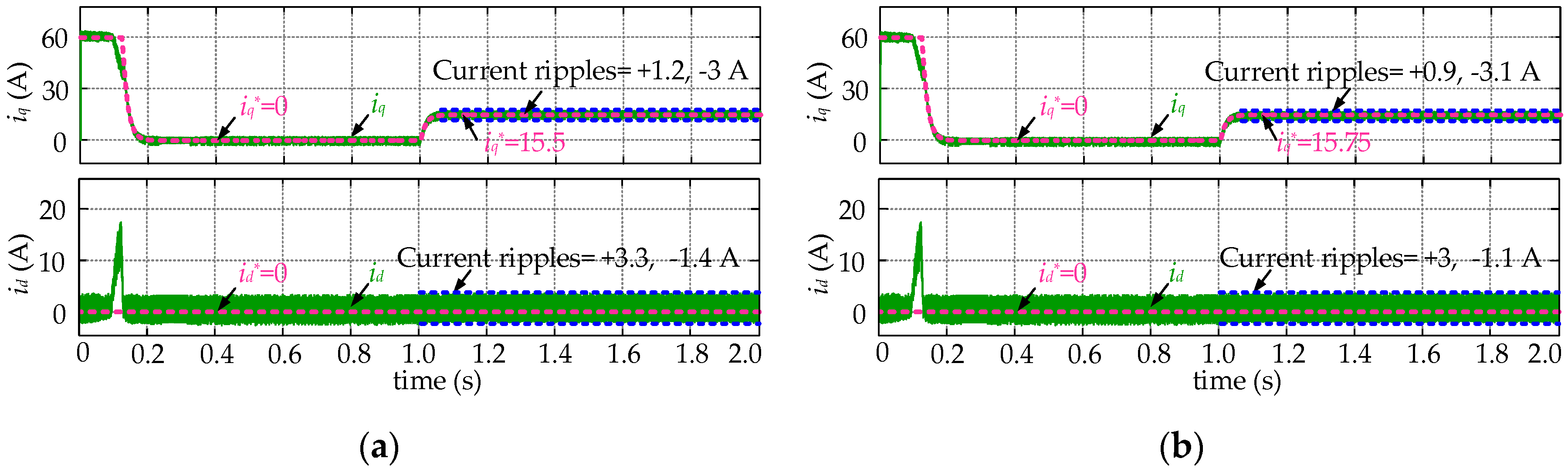
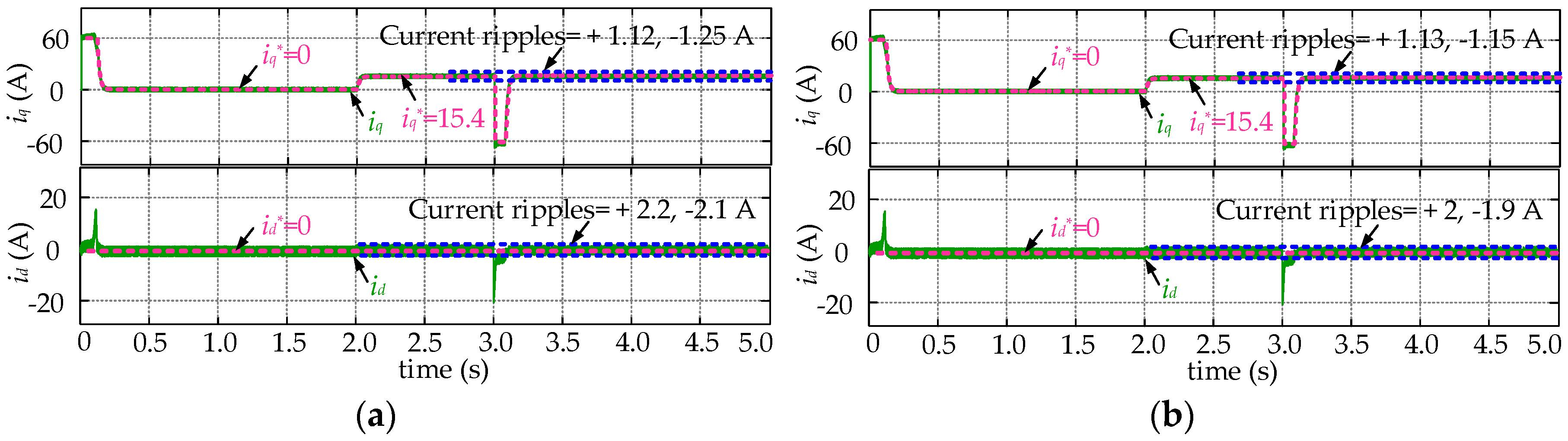
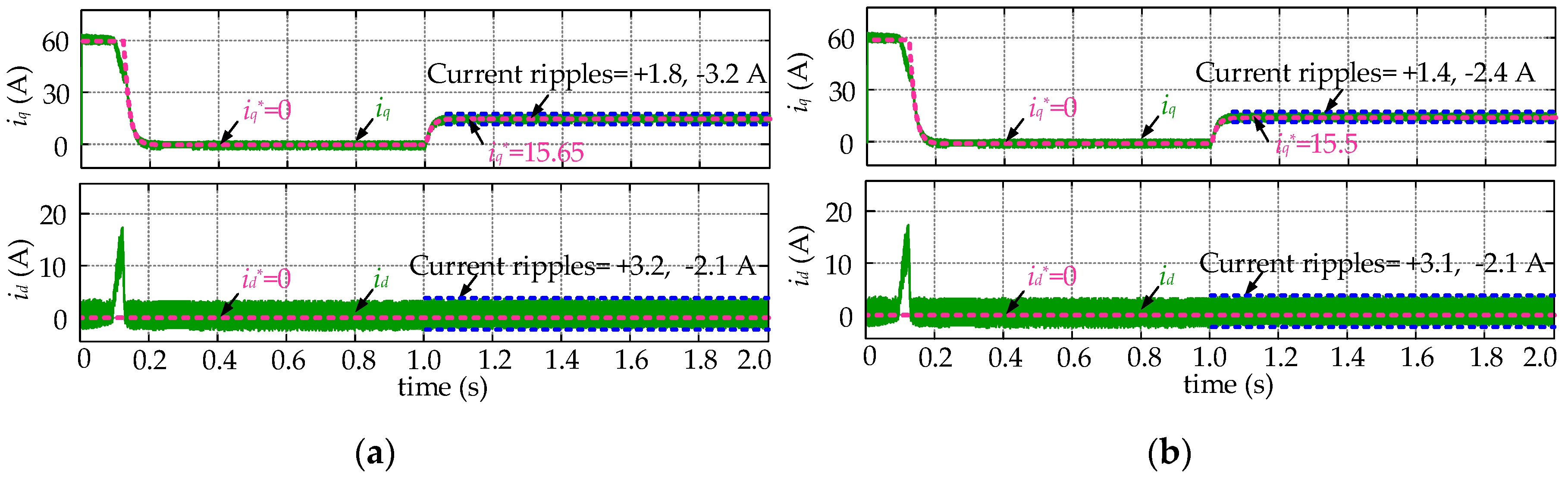
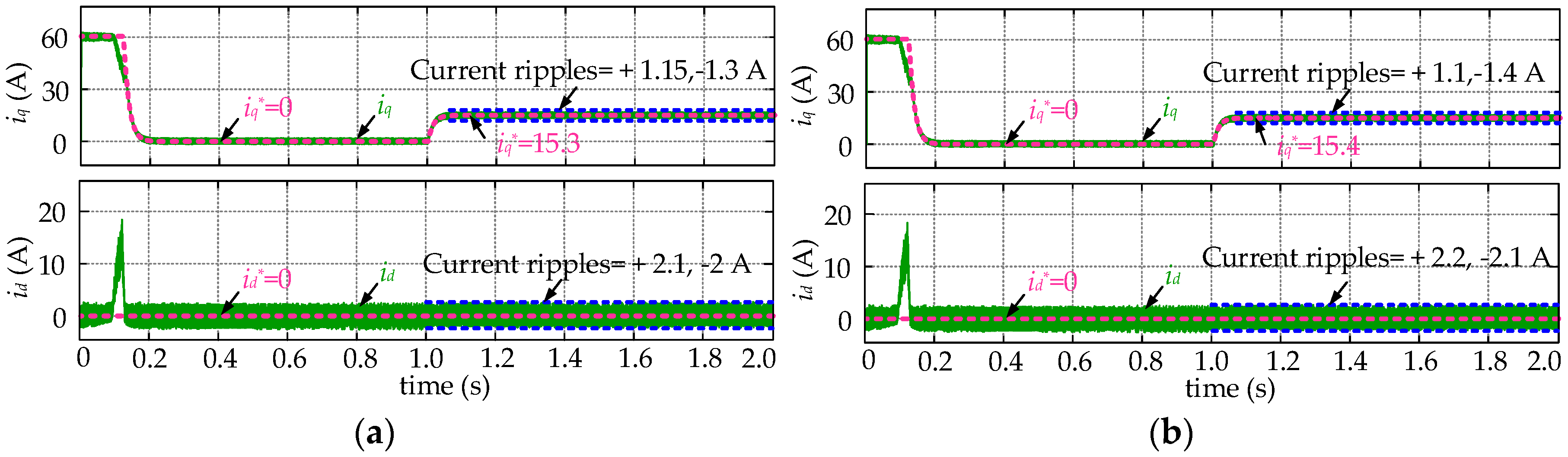
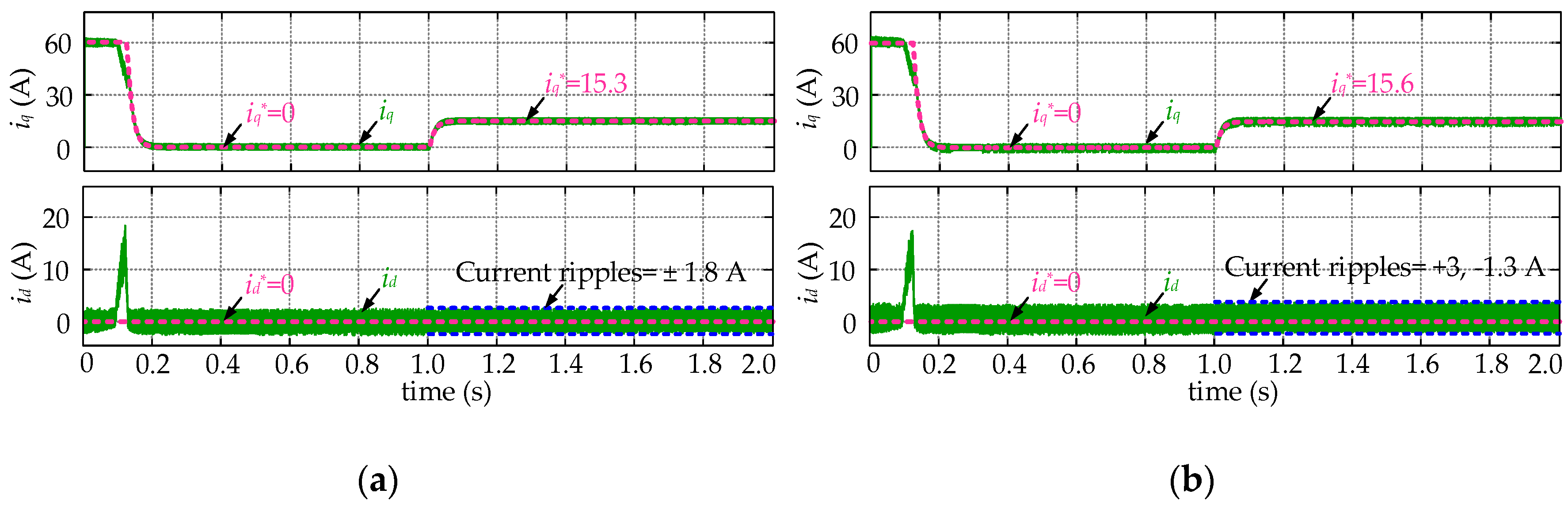
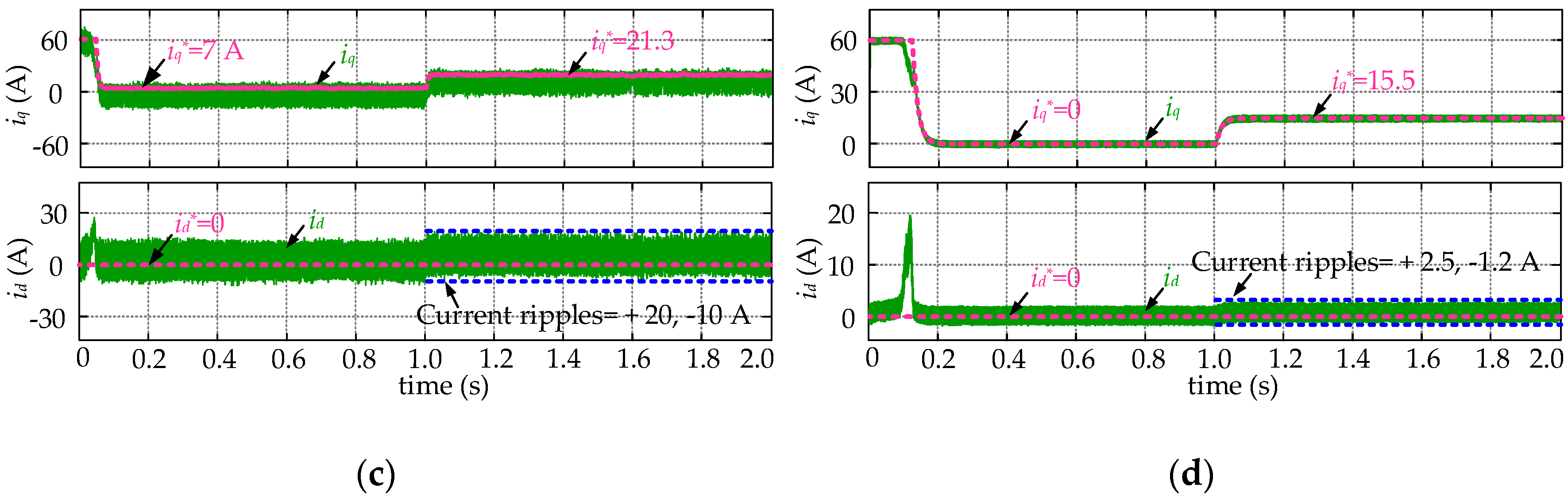
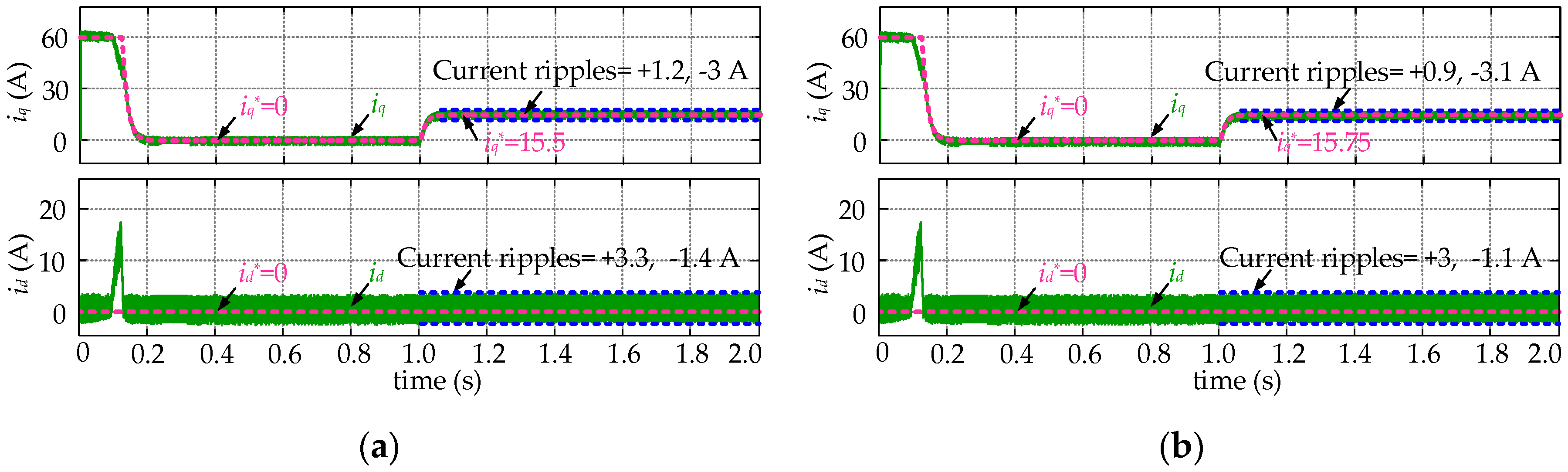
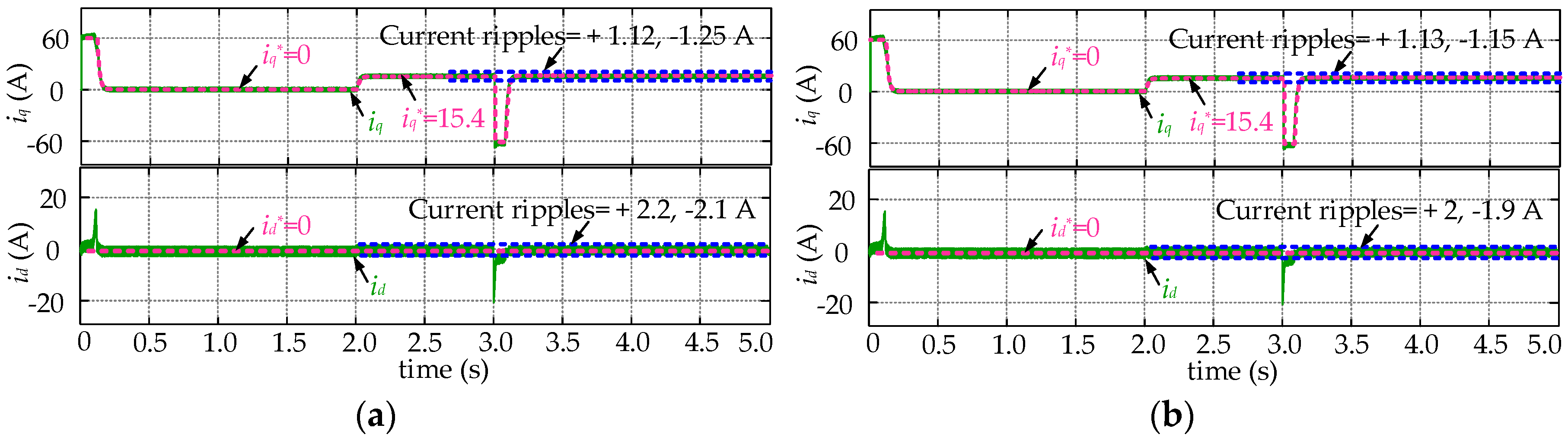
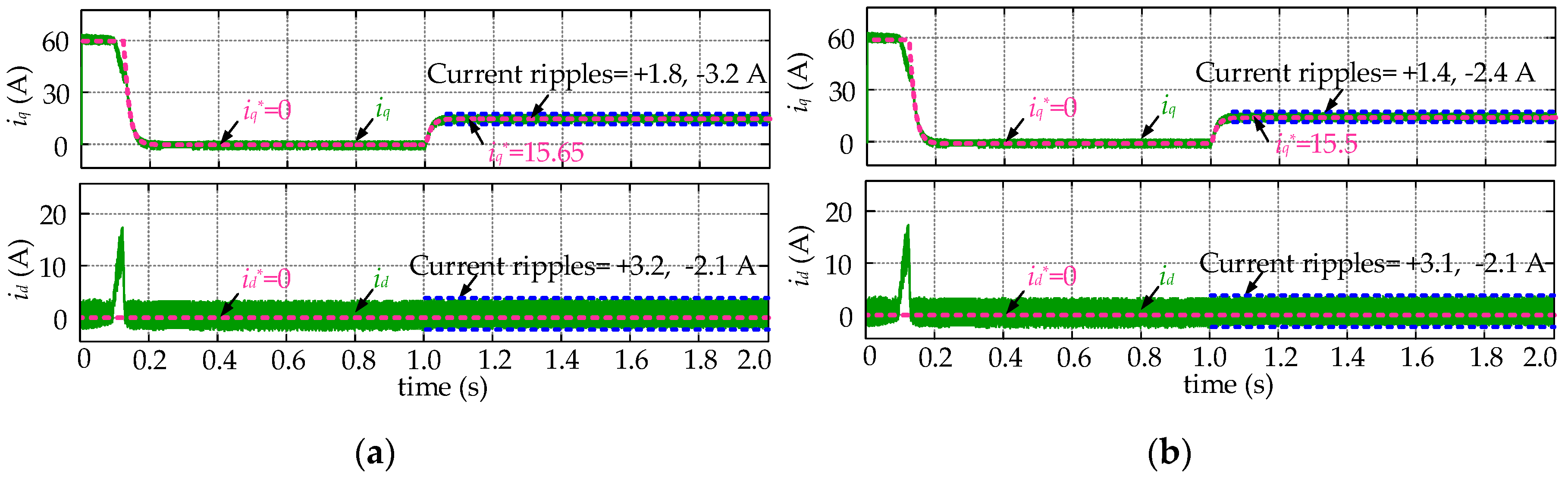
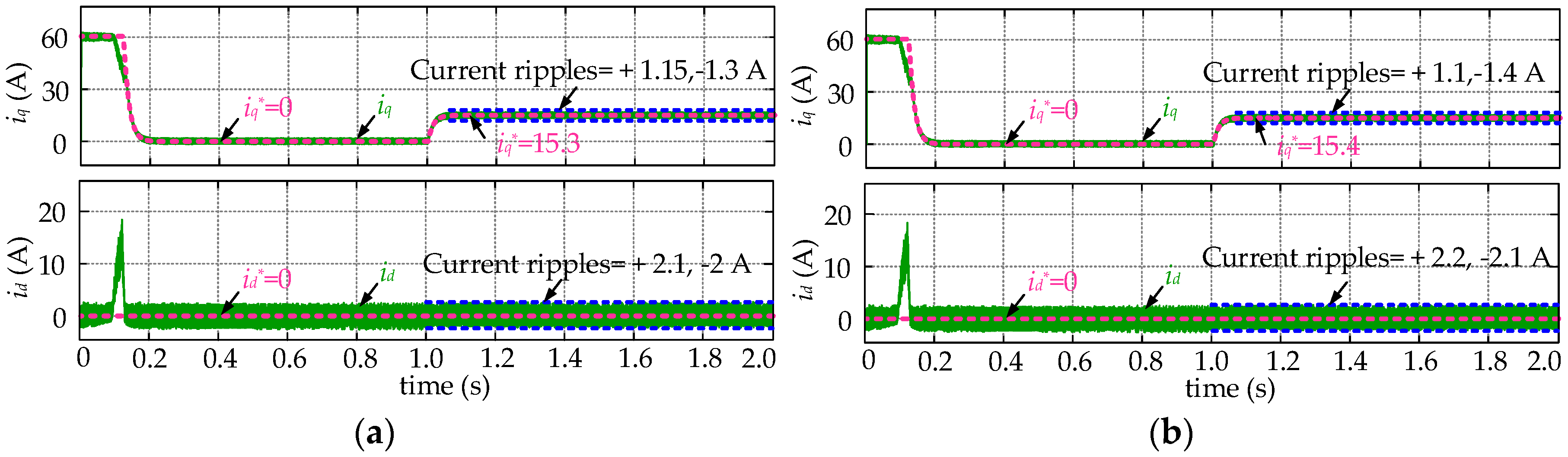
5.1. Simulation Results
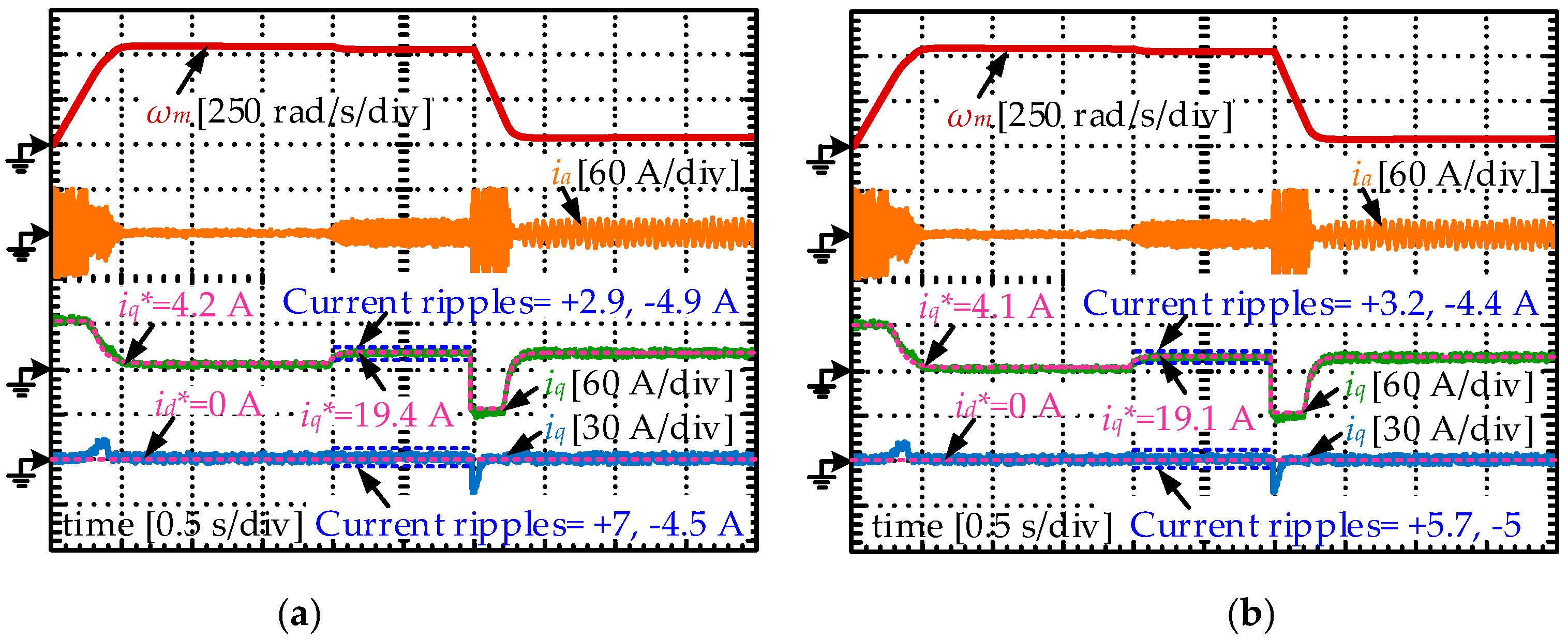
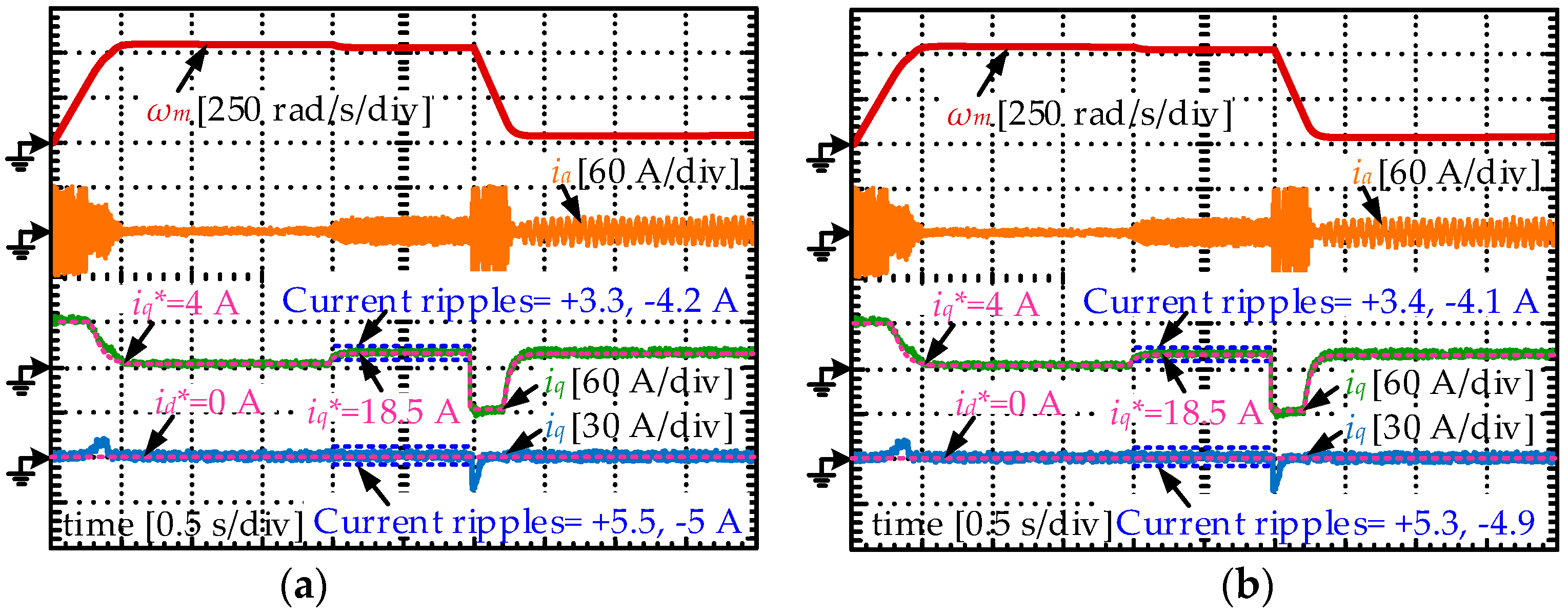
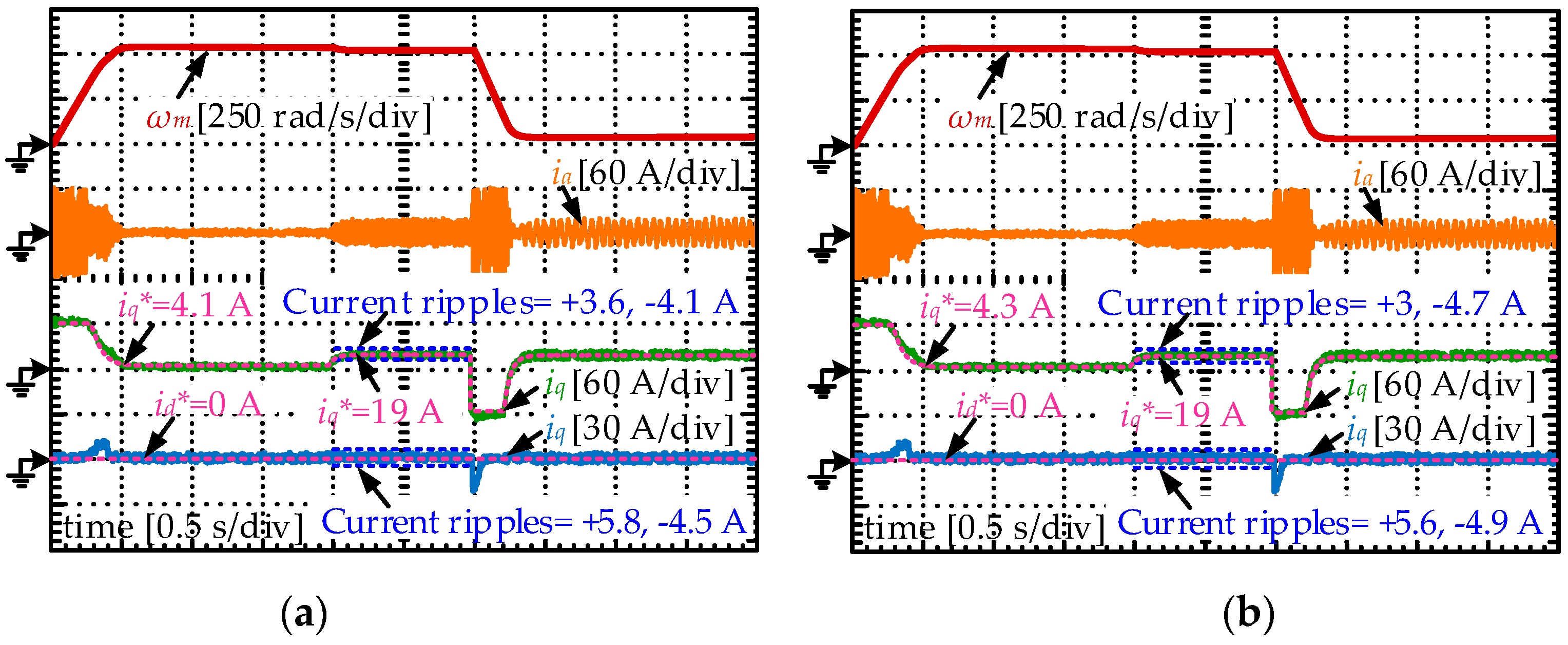
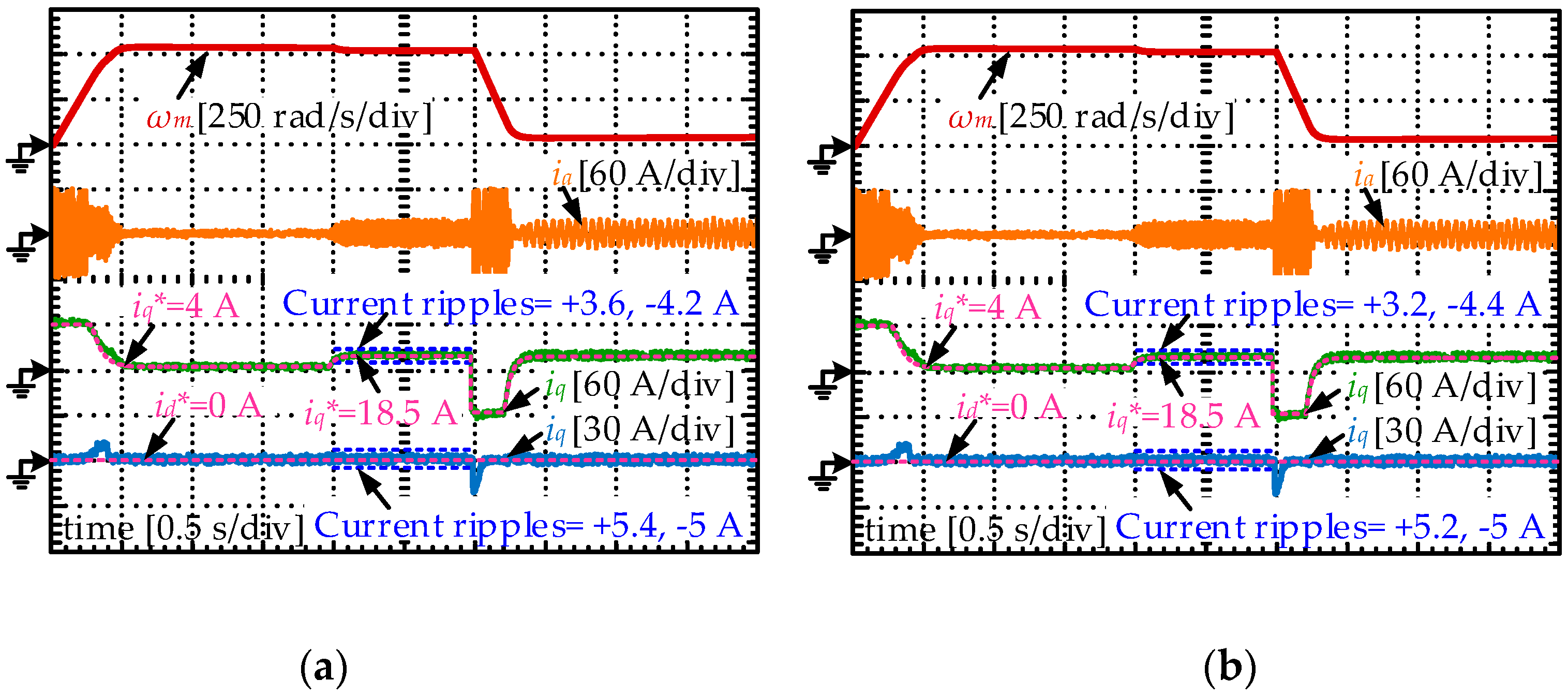
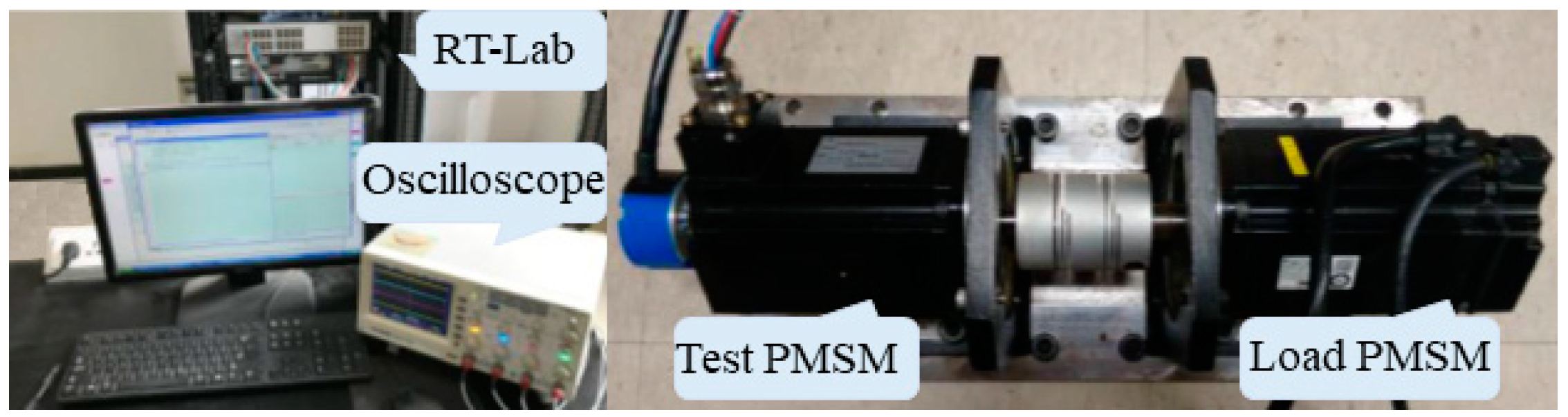
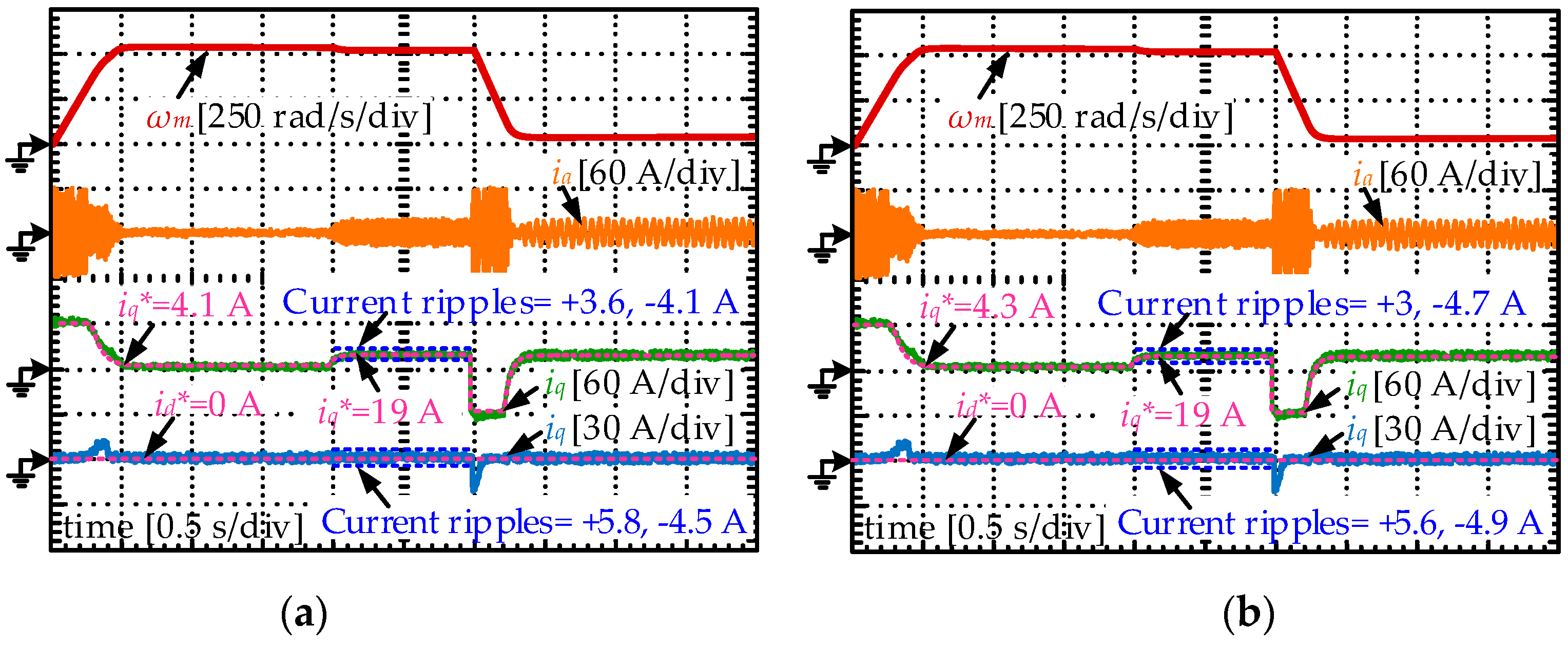
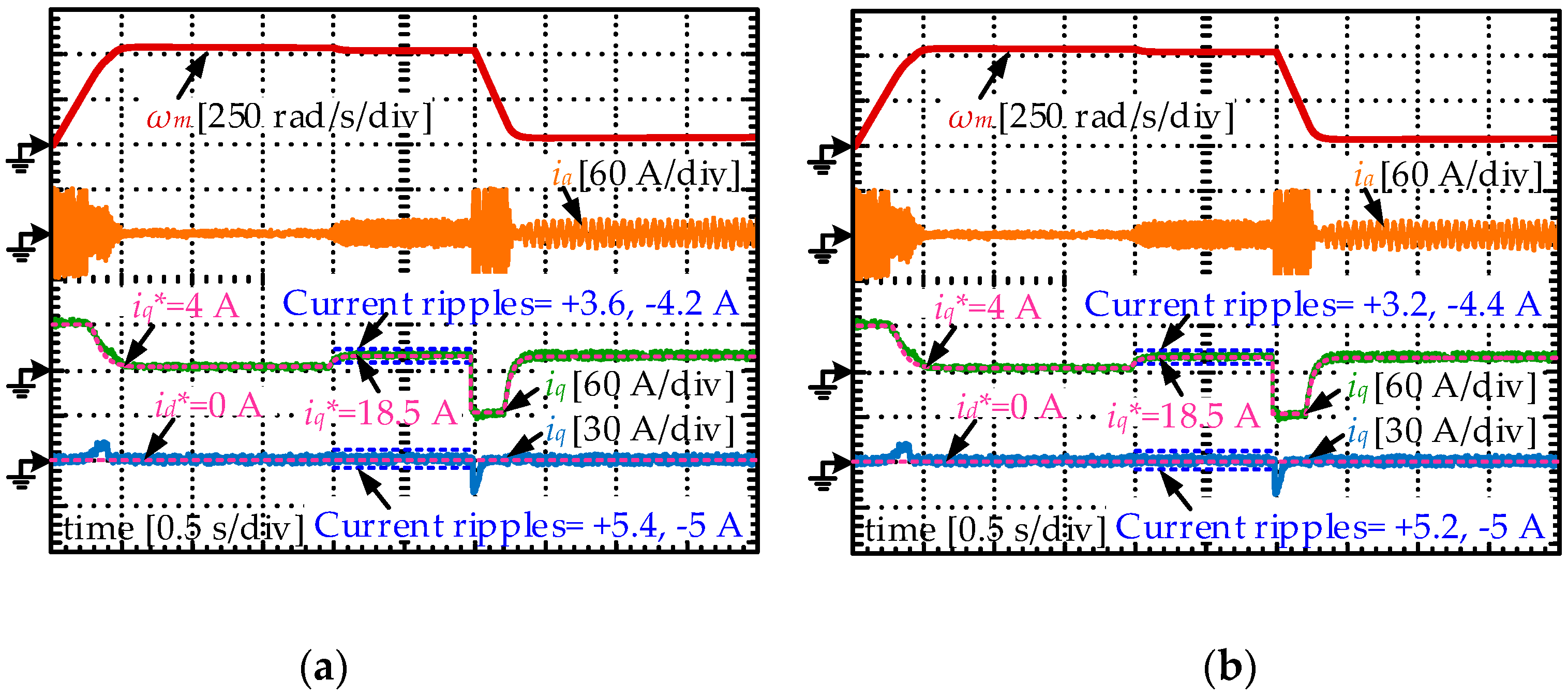
5.2. Experimental Results
6. Conclusions
- After establishing the discrete model for the SPMSM drives and explaining the mechanism of FCS-MPCC strategies, the sensitivity of the FCS-MPCC controller to the resistance and inductance disturbances are theoretically analyzed. It is found that the parameter mismatch problem will lead to obvious control performance reduction. In detail, the current static errors grow significantly when the parameter disturbance occurs, and even worse the system stability will be influenced when the inductance deviations are sufficiently large. Therefore, the necessity to employ a disturbance observer for compensation is clarified.
- A Lundberg observer is designed to obtain the system disturbances caused by the winding inductance and resistance mismatch problems. By using the pole assignment method, the parameters of the discrete observer are designed according to the stability condition as well as the fast response requirement. These pave the way for the relevant researches about observer-based FCS-MPCC controllers.
- The designed Luenberger observer is integrated into the prediction process of the FCS-MPCC controller to compensate the disturbances arising from parameter mismatch. Compared to the traditional FCS-MPCC algorithm, the current divergence and static errors will disappear in the parameter mismatch situations.
Author Contributions
Funding
Conflicts of Interest
References
- Liang, D.; Li, J.; Qu, R.; Kong, W. Adaptive Second-Order Sliding-Mode Observer for PMSM Sensorless Control Considering VSI Nonlinearity. IEEE Trans. Power Electron. 2018, 33, 8994–9004. [Google Scholar] [CrossRef]
- Gong, C.; Hu, Y.; Chen, G.; Wen, H.; Wang, Z.; Ni, K. A DC-Bus Capacitor Discharge Strategy for PMSM Drive System with Large Inertia and Small System Safe Current in EVs. IEEE Trans. Ind. Inform. 2019, 15, 4709–4718. [Google Scholar] [CrossRef]
- Wang, D.; Yuan, T.; Wang, X.; Wang, X.; Ni, Y. Performance Improvement of Servo Control System Driven by Novel PMSM-DTC Based On Fixed Sector Division Criterion. Energies 2019, 12, 2154. [Google Scholar] [CrossRef]
- Mun, J.M.; Park, G.J.; Seo, S.; Kim, D.W.; KIM, Y.J.; Jung, S.Y. Design Characteristics of IPMSM with Wide Constant Power Speed Range for EV Traction. IEEE Trans. Magn. 2017, 53, 8105104. [Google Scholar] [CrossRef]
- Geyer, T. Model Predictive Direct Current Control: Formulation of the Stator Current Bounds and the Concept of the Switching Horizon. IEEE Ind. Appl. Mag. 2012, 18, 47–59. [Google Scholar] [CrossRef]
- Mynar, Z.; Vesely, L.; Vaclavek, P. PMSM Model Predictive Control with Field-Weakening Implementation. IEEE Trans. Ind. Electron. 2016, 63, 5156–5166. [Google Scholar] [CrossRef]
- Zhang, Z.; Fang, H.; Gao, F.; Rodríguez, J.; Kennel, R. Multiple-Vector Model Predictive Power Control for Grid-Tied Wind Turbine System with Enhanced Steady-State Control Performance. IEEE Trans. Ind. Electron. 2017, 64, 6287–6298. [Google Scholar] [CrossRef]
- Tarczewski, T.; Grzesiak, L.M. Constrained State Feedback Speed Control of PMSM Based on Model Predictive Approach. IEEE Trans. Ind. Electron. 2016, 63, 3867–3875. [Google Scholar] [CrossRef]
- Li, H.; Lin, J.; Lu, Z. Three Vectors Model Predictive Torque Control Without Weighting Factor Based on Electromagnetic Torque Feedback Compensation. Energies 2019, 12, 1393. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, B.; Mei, Y. Deadbeat Predictive Current Control of Permanent-Magnet Synchronous Motors with Stator Current and Disturbance Observer. IEEE Trans. Power Electron. 2017, 32, 3818–3834. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay Compensation in Model Predictive Current Control of a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]
- Scoltock, J.; Geyer, T.; Madawala, U.K. A Comparison of Model Predictive Control Schemes for MV Induction Motor Drives. IEEE Trans. Ind. Inform. 2013, 9, 909–919. [Google Scholar] [CrossRef]
- Liu, J.; Gong, C.; Han, Z.; Yu, H. IPMSM Model Predictive Control in Flux-Weakening Operation Using an Improved Algorithm. IEEE Trans. Ind. Electron. 2018, 65, 9378–9387. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Model Predictive Torque Control of Induction Motor Drives with Optimal Duty Cycle Control. IEEE Trans. Power Electron. 2014, 29, 6593–6603. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Two-Vector-Based Model Predictive Torque Control Without Weighting Factors for Induction Motor Drives. IEEE Trans. Power Electron. 2016, 31, 1381–1390. [Google Scholar] [CrossRef]
- Gao, J.; Gong, C.; Li, W.; Liu, J. Novel Compensation Strategy for Calculation Delay of Finite Control Set Model Predictive Current Control in PMSM. IEEE Trans. Ind. Electron. 2019, in press. [Google Scholar] [CrossRef]
- Weihua, W.; Xi, X.; Youshuang, D. An adaptive incremental predictive current control method of PMSM. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013; pp. 1–8. [Google Scholar]
- Wang, W.; Xiao, X. Research on predictive control for PMSM based on online parameter identification. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 1982–1986. [Google Scholar]
- Wang, G.; Yang, M.; Niu, L.; Gui, X.; Xu, D. A Static Current Elimination Algorithm for PMSM Predictive Current Control. Proc. CSEE 2015, 35, 2544–2550. [Google Scholar]
- Niu, L.; Yang, M.; Liu, K. A Predictive Current Control Scheme for Permanent Magnet Synchronous Motors. Proc. CSEE 2012, 32, 131–137. [Google Scholar]
- Ju, Z.; Lv, X.; Wu, B.; Pu, L.; Duan, W.; Yang, P. Advanced Model Predictive Control for Three-Phase Inverter Circuit Based on Disturbance Observer. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019; pp. 900–904. [Google Scholar]
- Chen, H.; Qu, J.; Liu, B.; Xu, H. A robust predictive current control for PMSM based on extended state observer. In Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 1698–1703. [Google Scholar]
- Wang, B.; Chen, X.; Yu, Y.; Wang, G.; Xu, D. Robust Predictive Current Control with Online Disturbance Estimation for Induction Machine Drives. IEEE Trans. Power Electron. 2017, 32, 4663–4674. [Google Scholar] [CrossRef]
- Wipasuramonton, P.; Zhu, Z.Q.; Howe, D. Predictive current control with current-error correction for PM brushless AC drives. IEEE Trans. Ind. Appl. 2006, 42, 1071–1079. [Google Scholar] [CrossRef]
- Lee, K.; Park, B.; Kim, R.; Hyun, D. Robust Predictive Current Controller Based on a Disturbance Estimator in a Three-Phase Grid-Connected Inverter. IEEE Trans. Power Electron. 2012, 27, 276–283. [Google Scholar] [CrossRef]
- Bernard, P.; Andrieu, V. Luenberger Observers for Nonautonomous Nonlinear Systems. IEEE Trans. Autom. Control 2019, 64, 270–281. [Google Scholar] [CrossRef]
- Lu, J. Automatic Control Theory, 2nd ed.; Machinery Industry Press: Xi’an, China, 2009; pp. 238–241. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description | Value | Unit |
|---|---|---|---|
| Udc | DC-link voltage | 310 | V |
| L | real inductance | 2.4 | mH |
| Rs | real resistance | 0.175 | Ω |
| T | sampling time | 0.1 | ms |
| p | number of pole pairs | 3 | - |
| ωrated | rated speed | 520 | rad/s |
| Trated | rated torque | 5 | Nm |
| Ψf | PM flux | 0.075 | Wb |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Zhao, Y. Robust Perturbation Observer-based Finite Control Set Model Predictive Current Control for SPMSM Considering Parameter Mismatch. Energies 2019, 12, 3711. https://doi.org/10.3390/en12193711
Liu Z, Zhao Y. Robust Perturbation Observer-based Finite Control Set Model Predictive Current Control for SPMSM Considering Parameter Mismatch. Energies. 2019; 12(19):3711. https://doi.org/10.3390/en12193711
Chicago/Turabian StyleLiu, Zhicheng, and Yang Zhao. 2019. "Robust Perturbation Observer-based Finite Control Set Model Predictive Current Control for SPMSM Considering Parameter Mismatch" Energies 12, no. 19: 3711. https://doi.org/10.3390/en12193711
APA StyleLiu, Z., & Zhao, Y. (2019). Robust Perturbation Observer-based Finite Control Set Model Predictive Current Control for SPMSM Considering Parameter Mismatch. Energies, 12(19), 3711. https://doi.org/10.3390/en12193711