1. Introduction
Demand response (DR) programs encourage consumers to reduce their electricity demands when required. This helps energy consumers to adjust their energy consumption in response to the variations in electricity prices and incentives offered by utilities, resulting in bill reduction. DR helps in regulating the load at peak hours and during system contingencies [
1,
2]. Therefore, it can help to avoid the need for building new power plants. Further, it can help in enhancing the utilization of renewables by adjusting loads and improving system reliability [
3]. Thus, DR can provide economic assistance to both consumers and suppliers [
3,
4]. The DR problem has been an active research area in recent years and various methods have been suggested for its implementation [
1,
5,
6].
Meanwhile, microgrids (MGs) are also gaining popularity due to their capability to sustain the penetration of renewables and the ability of islanding. Due to the islanding ability, microgrids have the potential to enhance the service reliability to consumers by feeding local loads during system contingencies. However, due to the limited capacity of storage and intermittent nature of renewables, load shedding may be inevitable during peak load intervals. In order to address this problem, DR can be used as a potential solution. Various studies are available in the literature on the application of DR programs for microgrids [
1,
2,
3,
4,
5,
6,
7]. However, most of the existing studies utilize a centralized controller to collect all necessary information and compute the control solution [
8,
9], hence increasing the communication and computation burden on the central controller and making the system more fragile to single point failure [
10]. Moreover, keeping the privacy of each consumer becomes the main concern. To overcome these concerns, another approach, where decisions are made in a decentralized/distributed way, is considered [
11,
12]. In decentralized methodologies, each unit is controlled by its local controller and the control actions are based only on the local information. In addition, distributed strategies are adaptive to configuration changes, do not face scalability issues, and are feasible to implement for a large number of consumers [
10].
Due to the merits of distributed systems mentioned above, the implementation of DR programs in distributed ways is also gaining popularity [
13,
14,
15,
16,
17,
18,
19,
20,
21]. A distributed and iterative algorithm was proposed and executed in [
15], which is based on utility maximization. In [
16,
17], price uncertainty and game interaction methods were presented in energy consumption scheduling, together with the required demand constraints. In [
18], the authors suggested a game theory to balance the total load and decrease the peak-to-average power consumption ratio. All the consumers within the game contribute to finding the optimal power consumption schedule by solving a local optimization problem and sharing the results with the other users. Residential load control was considered in [
19] with a price forecast to a tradeoff between minimization of electricity payment and user waiting time. In [
20], the authors proposed an optimization problem as a Stackelberg game and used a genetic algorithm to maximize retailer revenue. Furthermore, on the consumer side, they divided the main optimization problem into three separate sub-optimization problems referring to interruptible, non-interruptible, and curtailable appliances. A distributed DR algorithm was proposed in [
21], based on a dual decomposition approach. The authors further proposed a fast approach based on binary search, with a fast convergence speed. The distributed algorithms were illustrated by numerical simulations to validate the better performance of the fast approach.
Although various research has been carried out on DR programs for microgrids, they still have some limitations and are not suitable to implement on certain networks. Existing studies have focused on distributed DR only for grid-connected microgrids [
9,
10,
15,
20,
21,
22,
23], where DR is triggered by market price signals. The distributed DR programs proposed in existing studies [
9,
10,
15,
20,
21,
22,
23] are dependent on price signals and cannot be applied on islanded microgrids, where price signals are not available. In addition, these studies utilized a central aggregator which decides the pricing signals depending upon the load demand of consumers. In the absence of the central aggregator, it is not possible to decide DR, thus making it not fully distributed. Finally, the DR programs in literature lack implementation in multi-microgrid (MMG) networks and are only applied for a single MG.
In order to overcome the limitations in existing studies, as mentioned earlier, a distributed DR method is proposed for an islanded MMG network in this study. The proposed distributed DR program does not require price signals and is based on only welfare maximization of microgrids in the network. Welfare function for each microgrid is decided according to the importance of amount of shortage power, which is determined after local optimization. The total surplus power and shortage power in the network is determined through information sharing via diffusion strategy. The available surplus power of the network is optimally allocated to microgrids with shortage power based on the welfare function of each microgrid using diffusion strategy. If the total available surplus power is less than the deficit power of the network, load curtailment is carried out. The amount of load curtailed in each microgrid is determined based on the initial demanded power and the amount of power allocated to that microgrid. For convergence analysis, the results of the proposed method (distributed DR) are also compared with the results of the consensus-based welfare maximization method. The main contributions for this study are as follows.
- 1)
In existing studies, distributed DR is implemented on grid-connected microgrids which requires market price signals and a central aggregator. However, market prices are not available for islanded microgrids. Thus, existing methods cannot be applied for islanded microgrids. Therefore, we have proposed a distributed DR which is not dependent on market price and can be implemented for islanded microgrids.
- 2)
In existing studies, distributed DR is applied to only single microgrids. We have proposed a distributed DR for a multi-microgrid system, which is more suitable for islanded microgrids to reduce load shedding by sharing power.
- 3)
Diffusion strategy is utilized in the proposed method; hence, the convergence time is reduced in comparison with conventionally used distributed methods, thus making it more suitable for re-optimization during system contingencies.
3. Problem Formulation
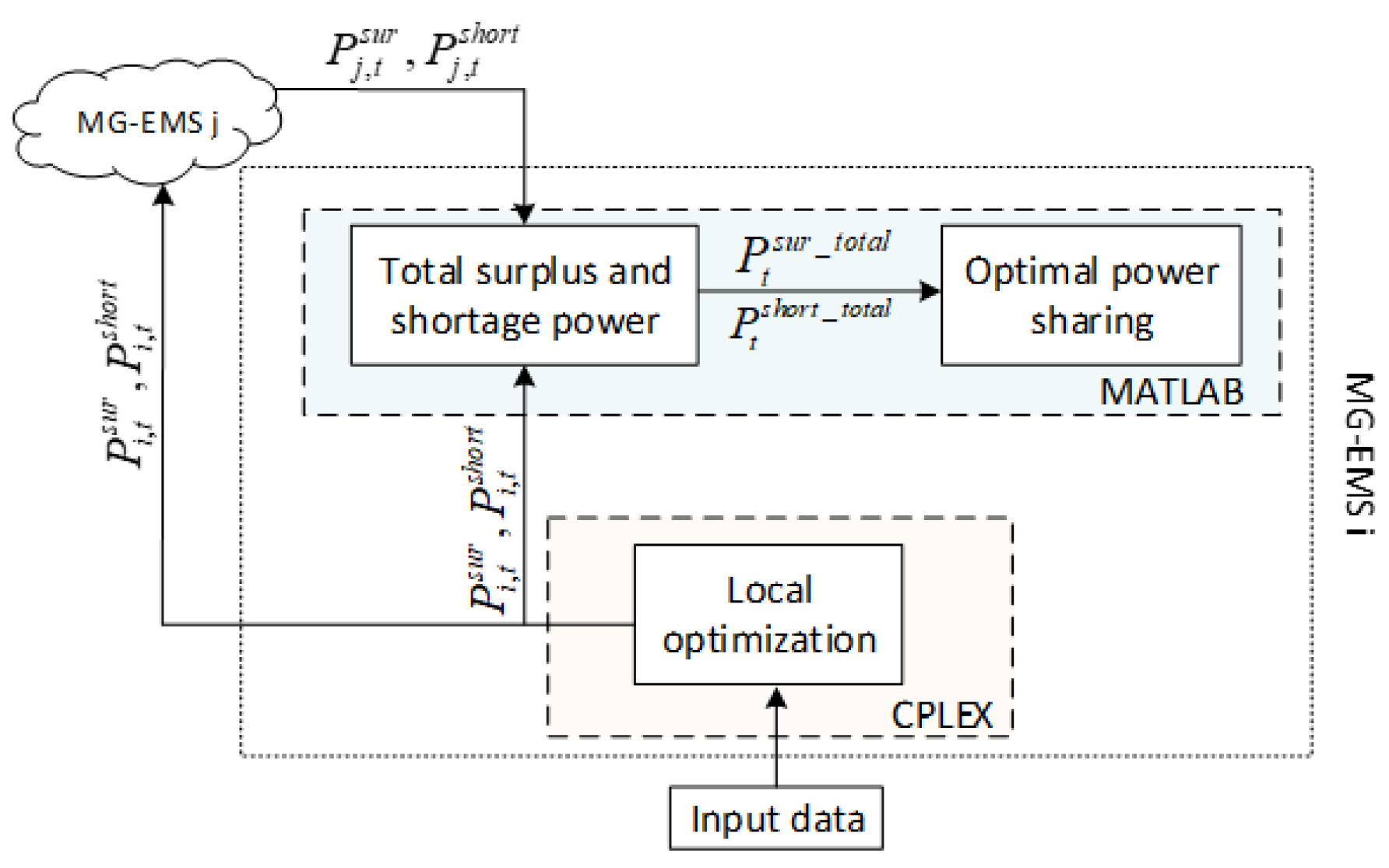
In this section, the mathematical model of the proposed distributed DR scheme for an islanded MMG network is presented. The proposed model is formulated for a scheduling horizon of
T with a time interval of
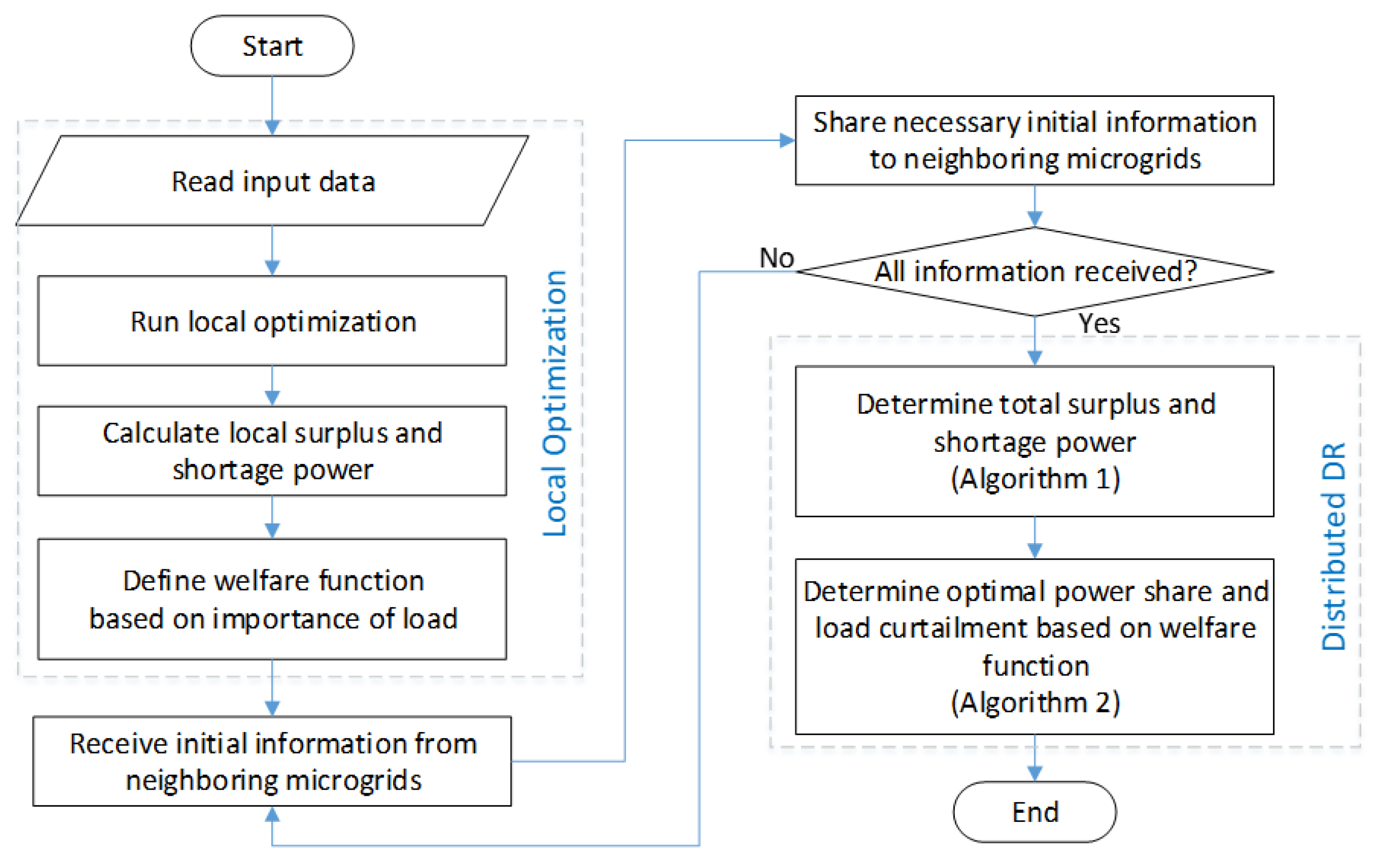
t, which can be any uniform interval of time. The step-by-step operation of a microgrid in the network is shown in
Figure 4. The microgrid operation is divided into two steps, namely local optimization and distributed DR. In the first step, the generation capabilities of DGs, RDGs, and BESS, along with the load profile of each microgrid are taken as input data. After receiving all data, each MG-EMS performs local optimization and ensures optimal operation of its components. Since each microgrid is being operated in an islanded mode, power exchange with the external grid is not possible. In cases where the available power is less than the power demand, load shedding is carried out to maintain the stable operation and power balance of the network. Local optimization is a parallel process for all the microgrids in the network. After local optimization, each MG-EMS has the information of local shortage power and surplus power available in its microgrids. Depending upon the importance of the amount of shortage power, MG-EMS decides a welfare function.
After local optimization by the MG-EMS, prior to the second step, MG-EMSs share necessary information with each other and wait until all necessary information is shared among the microgrids in the network. This step is carried out to overcome the issues which might occur due to communication delays in the network. The second step, i.e., distributed DR, is to determine the optimal power allocation and the load curtailment. In order to determine optimal power sharing, the information of total shortage and surplus power available in the network is required. Using Algorithm 1, we can determine the total available surplus and shortage power in the network in a distributed way without using any central entity. The total surplus is optimally shared to microgrids with shortages using Algorithm 2.
The proposed operation method has been developed for an islanded MMG network. During the islanding of the microgrid, the MG-EMS should switch from normal operation algorithm to islanded operation algorithm. Various algorithms are available in literature for distributed DR in grid-connected mode [
9,
10,
15,
20,
21,
22,
23]. Microgrids can utilize any of the algorithms available in the literature for distributed DR in grid-connected mode, while the proposed method can be utilized during islanded mode. The existing literature lacks research on distributed DR schemes for islanded microgrids; therefore, in this study, we have developed an operation algorithm for islanded microgrid networks. The detailed mathematical modeling of local optimization and distributed DR is explained in the following sections.
3.1. Local Optmization
The objective of the proposed optimization model is to minimize the total operational cost of each microgrid, as shown in Equation (6). The first line of Equation (6) corresponds to all costs related to DGs, i.e., generation cost, startup cost, and shutdown cost, respectively. The first term of the second line is the penalty cost when load shedding is carried out. The second term of the second line is the incentive price for the microgrid to show their surplus. The constraints for DG are given by Equations (7)–(10). Equation (7) represents the operation bounds of DG at time
t. On-off status of DGs is determined by Equation (8). The start-up and shutdown statuses of DG are determined using Equations (9) and (10), respectively. The BESS model can be represented by Equations (11)–(14). The maximum and minimum bounds for charging and discharging BESS units are given by Equations (11) and (12), respectively. At each interval, the state of charge (SOC) is computed according to Equation (13). The constraint for maximum and minimum bounds for SOC at time
t, is given in Equation (14). The constraint for power balance for a single microgrid is given by Equation (15). The first two terms of (15) are the DG and RDG power generation, respectively, the third and fourth terms are the discharging and charging power for BESS, the fifth and sixth terms are the local surplus power and shortage power in the microgrid, while the last term is the electric load of microgrid at interval
t. Equation (15) shows that the power generated by DGs, RDGs, BESS discharging, and amount of shortage power should be balanced with BESS charging power and load amount.
3.2. Distributed Demand Response
After all of the MG-EMSs have completed local optimization for their microgrids and the necessary initial information has been received and shared, the next is step is distributed DR. The proposed distributed DR method comprises two steps, namely information sharing and optimal power allocation. Both steps are carried out in a distributed way using diffusion strategy, as described in detail in the following sections.
3.2.1. Information Sharing
In the proposed distributed DR strategy, the first step is the exchange of information between all the MG-EMSs in the network to determine the total available surplus and deficit power in the network. The detailed mechanism of information sharing is explained in Algorithm 1. In order to determine the total surplus in the network, at each iteration the node
i updates its current state
to a new state
using the local stochastic gradient at the iteration. The local stochastic gradient can be calculated from the difference of the intermediate state
at this iteration [
24]. Similarly, the total shortage in the network can be determined. By the end of Algorithm1, the amount of surplus power and shortage power in the network is known. According to the proposed approach, each MG-EMS participates in determining the total surplus and shortage power. Each MG-EMS in the network, shares information in a distributed way until all MG-EMSs reach a consensus, which is used to compute the total surplus/shortage power of the network. The proposed approach requires no central entity to determine total surplus/shortage power of the network.
| Algorithm 1: Information Sharing |
![Energies 12 03701 i001]() |
| Algorithm 2: Distributed demand response |
![Energies 12 03701 i002]() |
3.2.2. Optimal Power Allocation
In the proposed distributed DR strategy, the second step is to maximize the welfare of the network by optimal power sharing among microgrids. To maximize the welfare of the distributed network, the global welfare objective function is described in Equation (16); here,
is the welfare function of each microgrid. Therefore, the goal of the objective function (17) is to maximize the global welfare of the network and is obtained by summing all the individual welfare functions of each microgrid.
In contrast to the first step, i.e., information sharing, the gradient of the welfare function is used as the stochastic gradient (
). The detailed mechanism is explained in Algorithm 2. In order to ensure the optimal solution lies inside a feasible region as described in Equation (18), penalty function (19) is used. With the addition of the penalty function, the objective function described in (17) is redefined as in (20):
Here, is a parameter which represents the importance of the penalty function and z is a tuning scalar. Penalty function (19) is a squared deviation from the constrained function described in (18), tuned by the scalar z.
4. Numerical Simulations
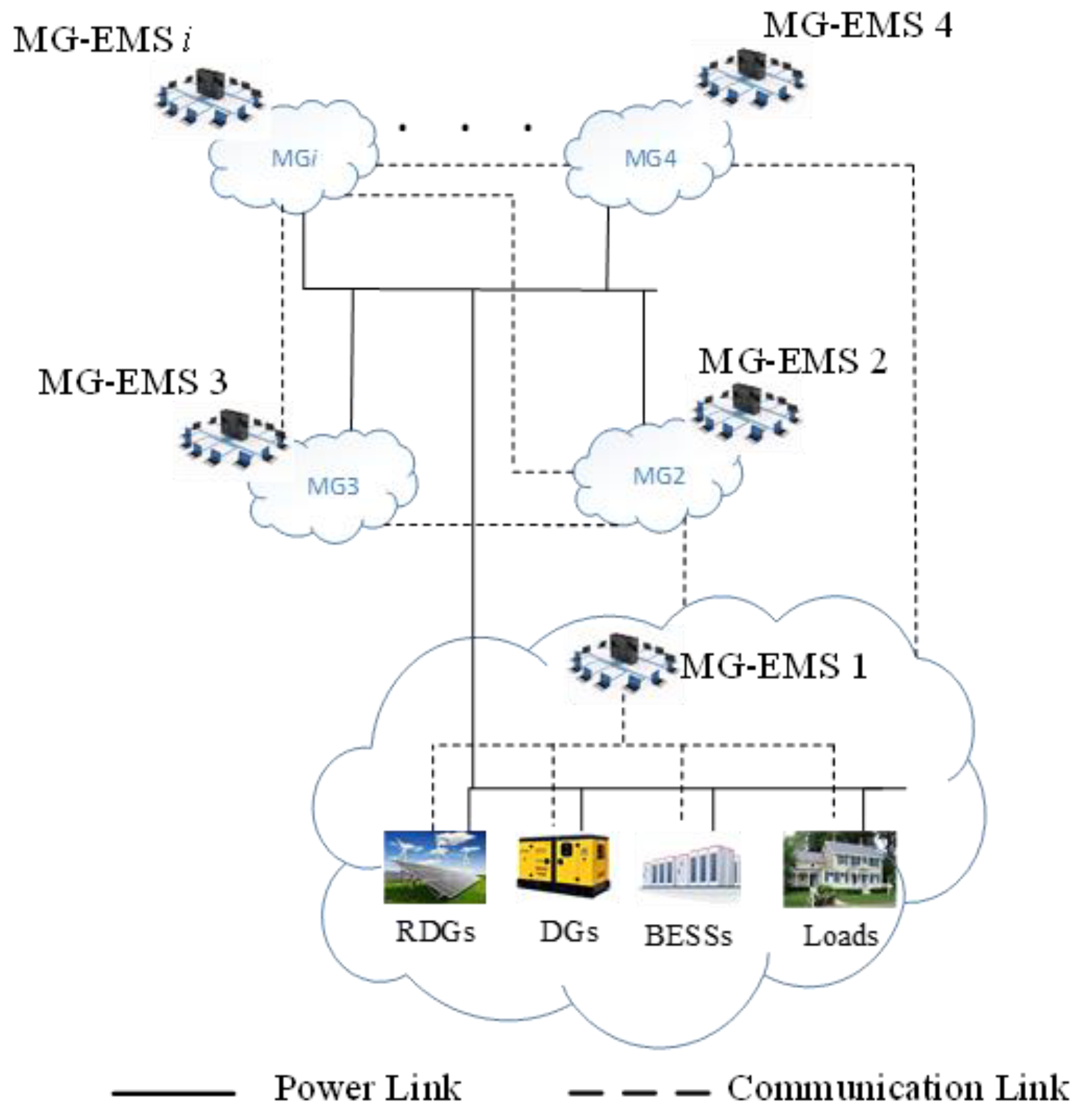
In order to realize the effectiveness of the proposed distributed DR scheme, an islanded MMGs network of five microgrids was considered in this study, as illustrated in
Figure 1. Each microgrid includes a DG, RGDs (wind turbine or photovoltaic array), a BESS, and electric load. The load within each microgrid is prioritized depending upon its importance, and its priority is represented using a welfare function. All microgrids in the network are interconnected and can share power with each other. In addition to the power exchange, MG-EMSs can also share information in a distributed way. The proposed method is formulated for a 24 h scheduling horizon with a time step of 1 h. For each time step
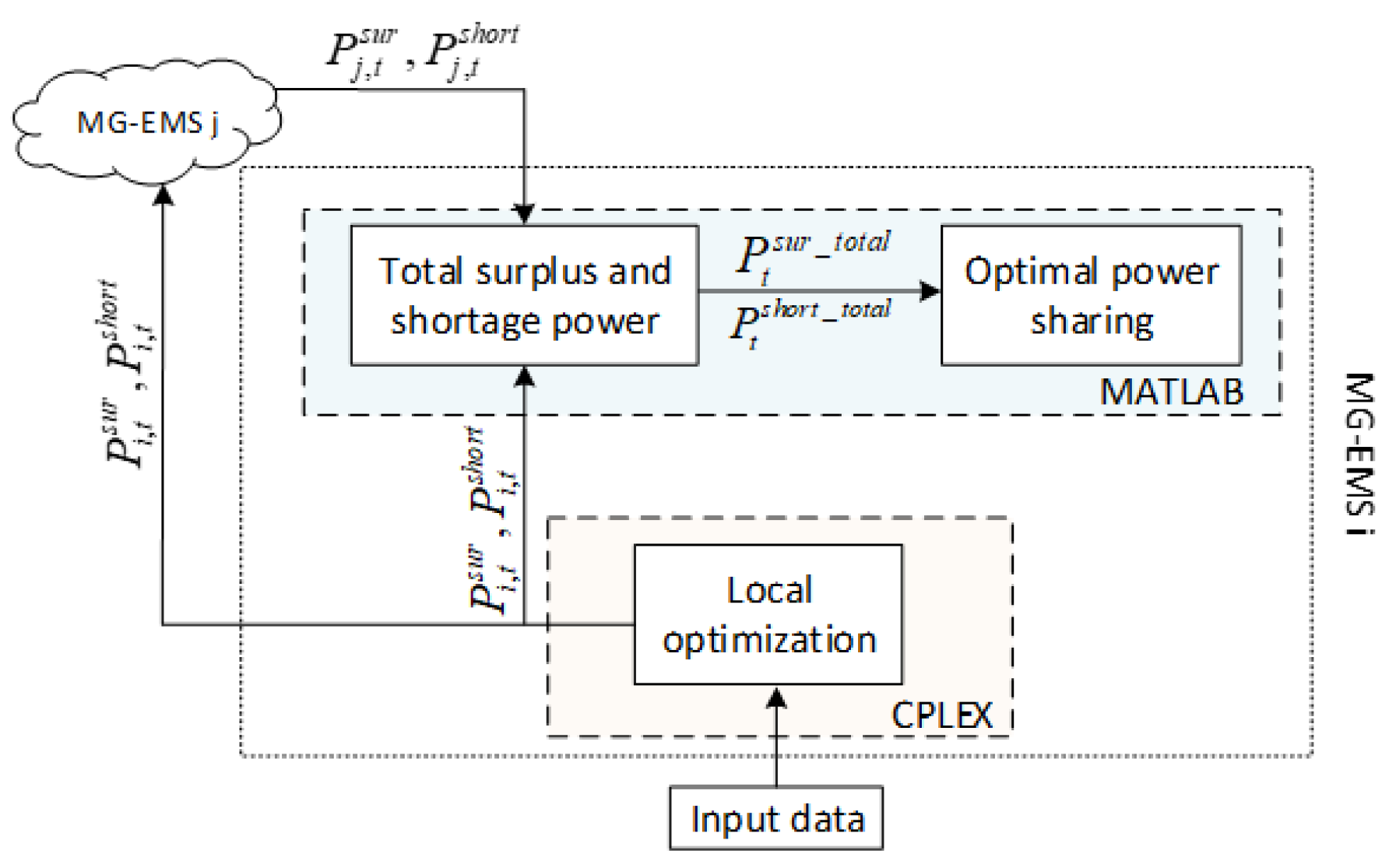
t, the algorithm takes some iterations to reach a convergence point. In the simulation results, iteration numbers are the repetition of the same algorithm until it reaches a consensus, which is the optimal value. The simulations are carried out in a MATLAB environment by integrating it with IBM ILOG CPLEX [
27] on a laptop (Intel Core i7-7500U CPU @ 2.70GHz, 8GB RAM).
Figure 5 shows the simulation setup schematic and represents the individual roles of MATLAB and IBM ILOG CPLEX, for microgrid operation.
4.1. Input Data
DGs have the main role in optimizing the operation cost of microgrids. The parameters associated with DGs considered for each microgrid are given in
Table 1. A BESS can store excess power during the intervals when demand is low and discharge it in peak load intervals to reduce load shedding. The parameters related to each microgrid’s BESS are tabulated in
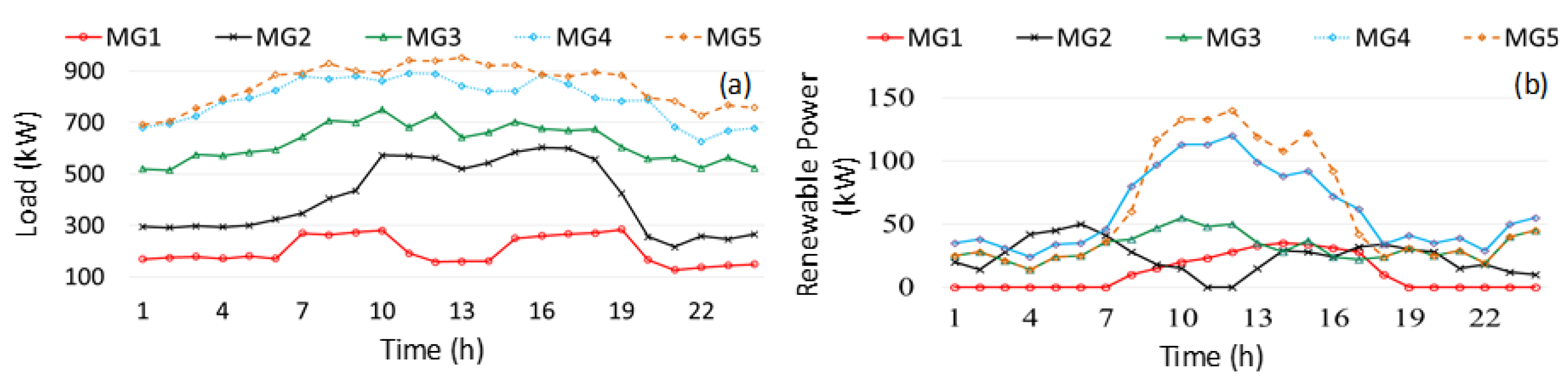
Table 2. The penalty costs associated with load shedding at MG1, MG2, MG3, MG4, and MG5 are 500, 430, 350, 300, 260, and 240, respectively in Korean Won (KRW). The forecasted values of load and output power of the RDGs, taken as input, are shown in
Figure 6a,b, respectively. The input data, i.e., DG parameters, BESS parameters, and forecasted values of load and renewable generation, are taken from [
28]. Results of local optimization based on the input data mentioned above are discussed in the next section.
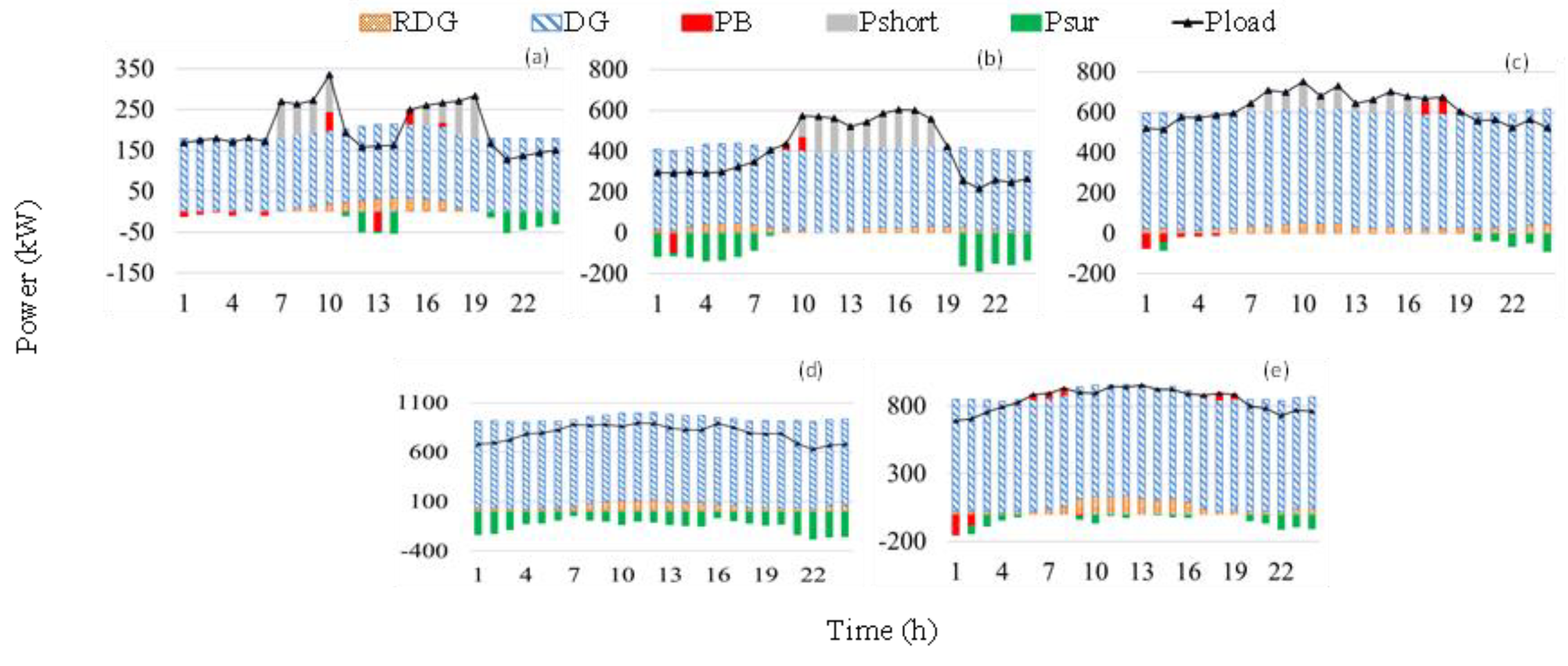
4.2. Local Optimization Results
Results of local optimization for each microgrid are shown in
Figure 7. In
Figure 7a–c respectively, it can be seen that the MG1, MG2, and MG3 have shortages during peak load intervals, whereas, due to the high generation capabilities of MG4 and MG5, they do not have shortage power throughout the day, as shown in
Figure 7d,e. Microgrid-wise surplus power and shortage power at each interval of time are shown in
Table 3. The negative values indicate the shortage power, whereas the positive values indicate surplus power in
Table 3. Similarly, in
Figure 7, battery charging power is taken as negative and battery discharging power is taken as positive.
After local optimization, MG-EMS decides the value of the w parameter depending upon the priority of shortage power. A w parameter value is selected between 0 and 100. The available surplus at each interval can be shared to microgrids with shortages in an optimal way to decide load curtailment (demand response) in the network. The results for distributed DR are discussed in detail in the next section.
4.3. Distributed Demand Response Results
In this study, we have considered two different cases in order to illustrate the effectiveness of the proposed distributed DR method. In the first case (case 1), the difference between the shortages in microgrids is not significant, whereas in the second case (case 2), shortage power in one microgrid is significantly lower as compared to other microgrids in the network. For each case (case 1 and case 2), the total information of surplus and shortage power in the network is determined first, followed by the optimal power allocation to microgrids with shortage power. Meanwhile, during the intervals when the total surplus of the network is greater or equal to the shortage in the network, the allocated power to each microgrid is equal to the shortage power in that microgrid. The results of information sharing and optimal power allocation for case 1 and case 2 are discussed in the next section.
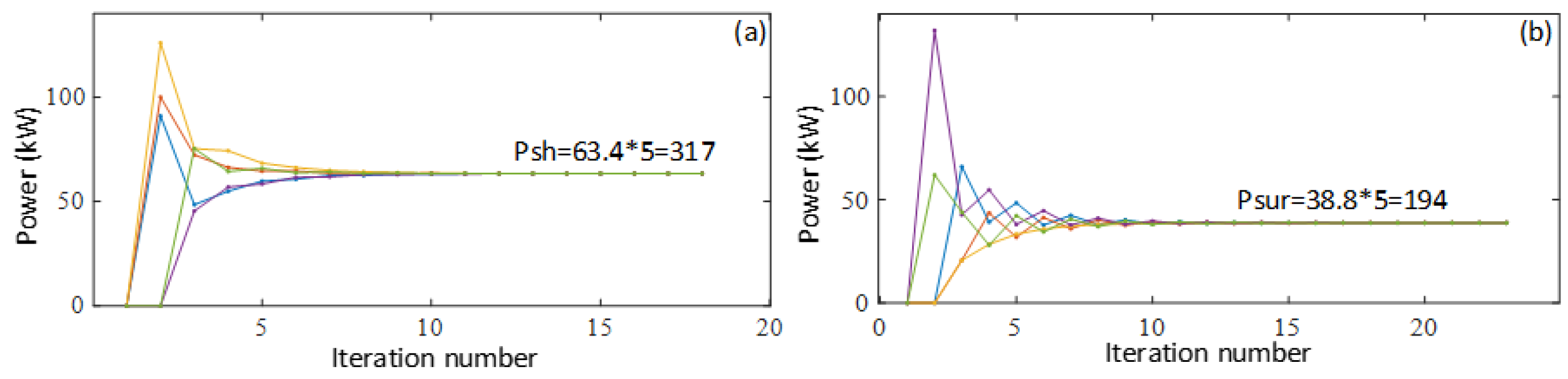
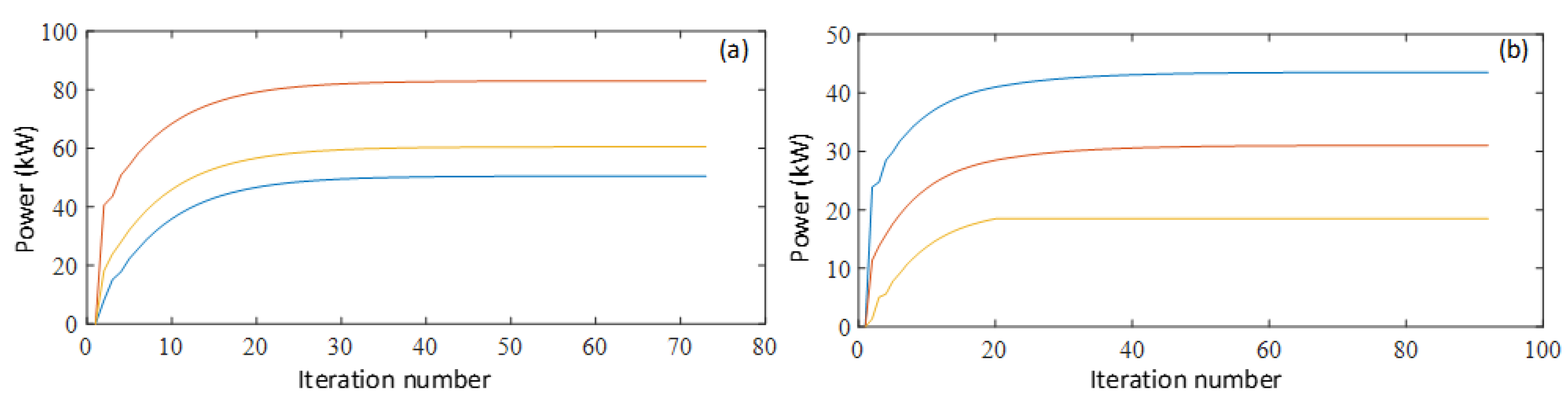
4.3.1. Case 1: Information Sharing
By applying Algorithm 1, the total available surplus power and shortage power in the network are determined for interval 10, as shown in
Figure 8. Interval 10 has been taken as a representative interval of case 1. The same method is implemented for other intervals. In order to determine the total shortage power in the network, each MG-EMS shares information with its neighbors. The shortage power information of all the MG-EMSs converge to a single value, i.e., 63.4 kW, which is the average of the shortage power in the network (
Figure 8a). In a similar way, the total surplus power in the network is determined for the same interval, shown in
Figure 8b, where the information converges to 38.8 kW.
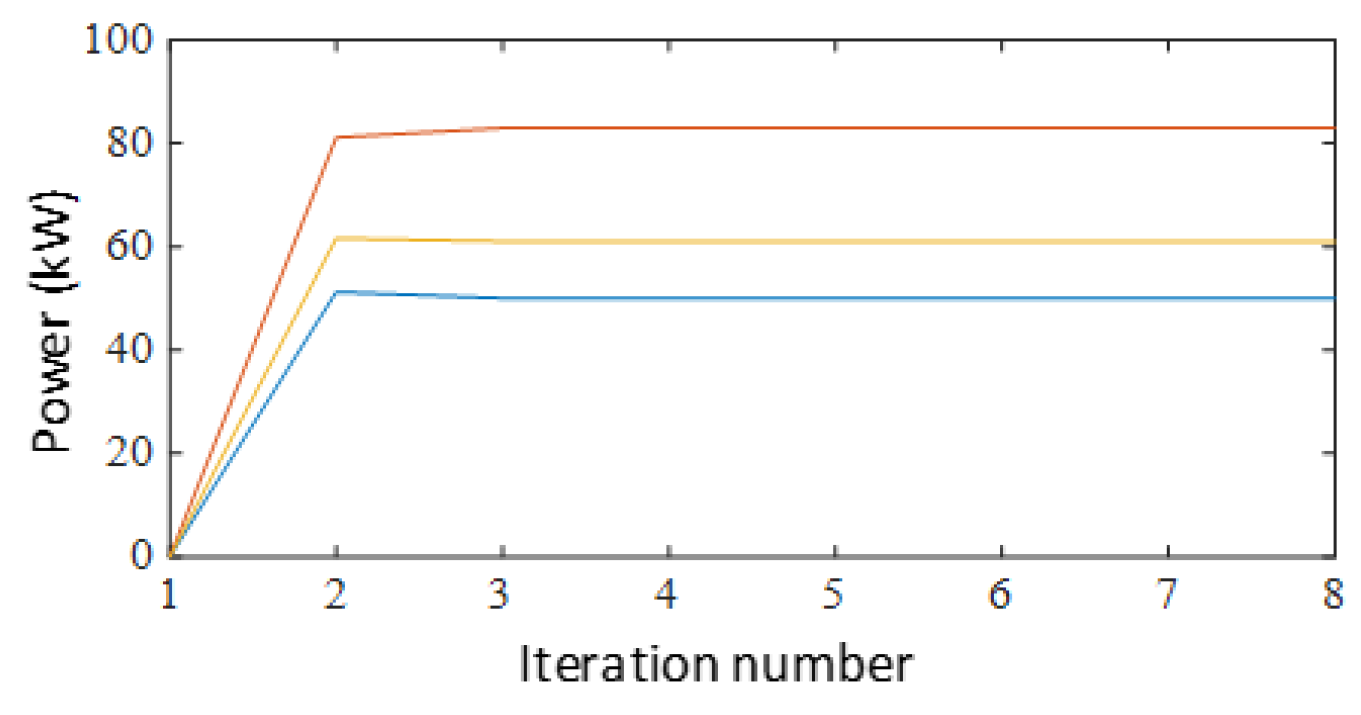
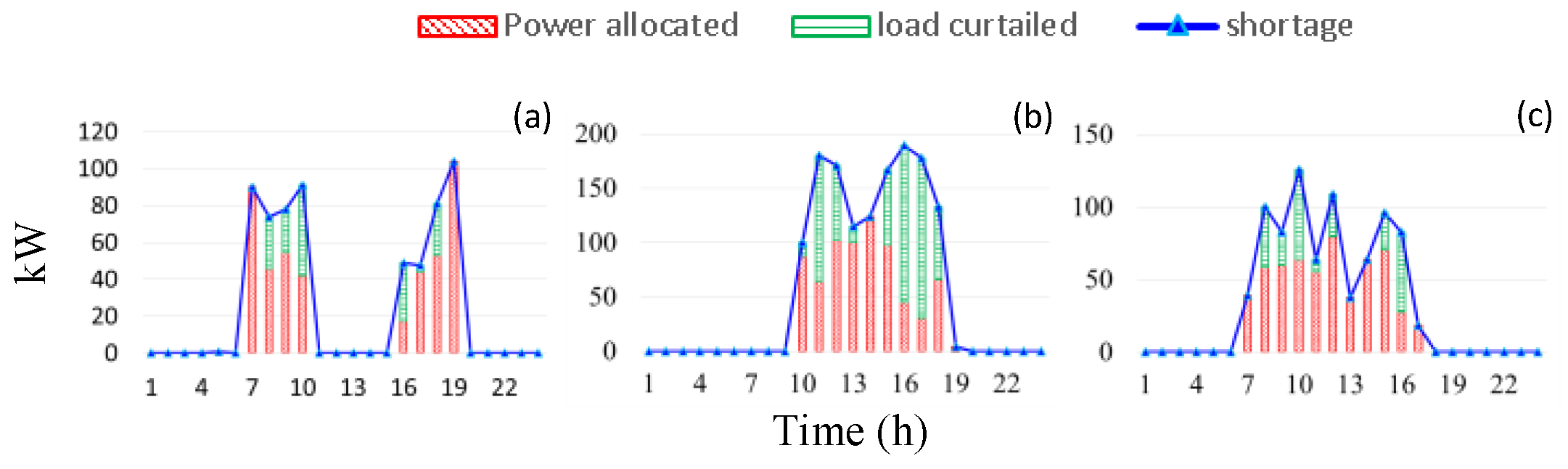
4.3.2. Case 1: Optimal Power Allocation
By using Algorithm 2, we can maximize the welfare of the MMG network, by determining the optimal power allocated to each microgrid with shortage power. The optimal power allocated to microgrids depends upon the welfare function of each microgrid. The results for optimal power allocation for interval 10 are shown in
Figure 9 and
Table 4. In this case,
w2 >
w3 >
w1; therefore, the power allocated to MG2 is the highest and the power allocated to MG1 is the lowest. In this case, none of the microgrids received the allocated power equal to their initial shortage, even though the value of
w2 is much higher than
w1 and
w3. This is due to the limited amount of surplus power available in the network.
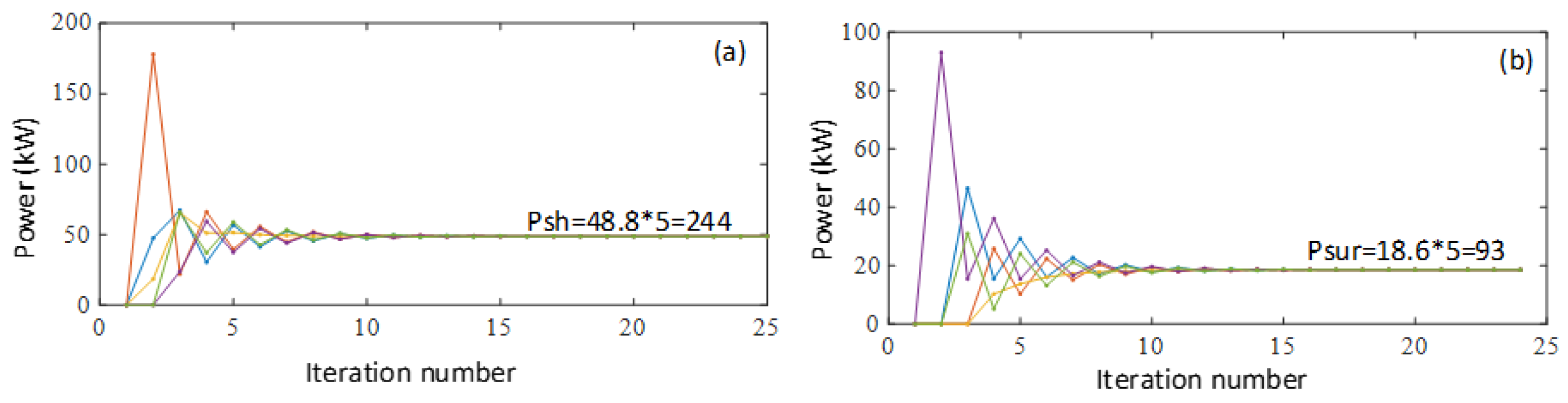
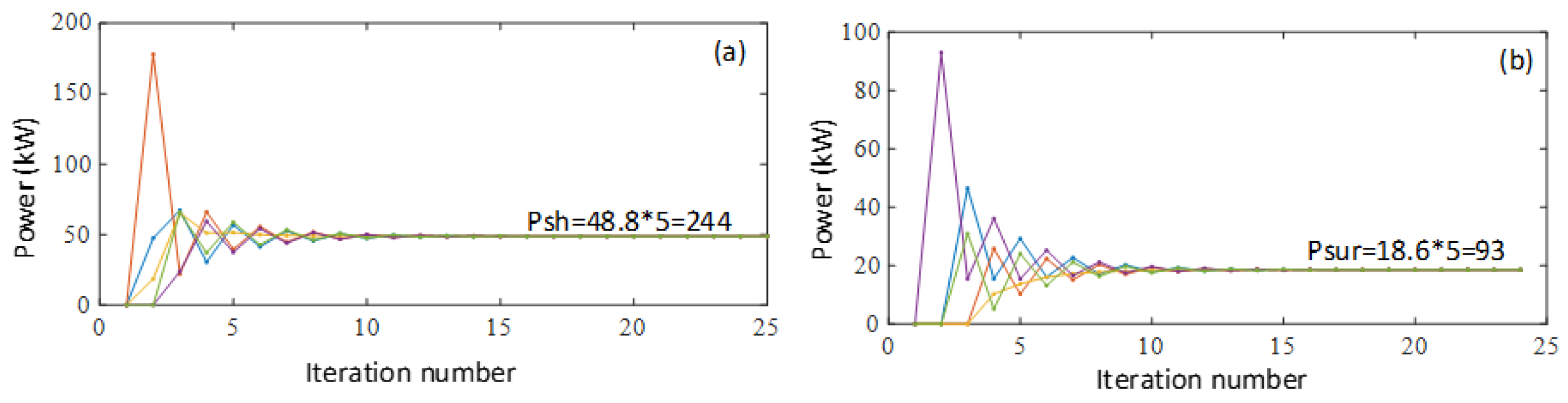
4.3.3. Case 2: Information Sharing
As with case 1, Algorithm 1 is used to determine the total available surplus power and shortage power in the network for interval 17. Interval 17 has been taken as the representative interval of case 2. As shown in
Figure 10a, the shortage power information of all the MG-EMSs converges to a single value, i.e., 48.8 kW, which is the average of shortage power in the network. In a similar way, the total surplus power in the network is determined for the same interval as shown in
Figure 10b, where the information converges to 18.6 kW.
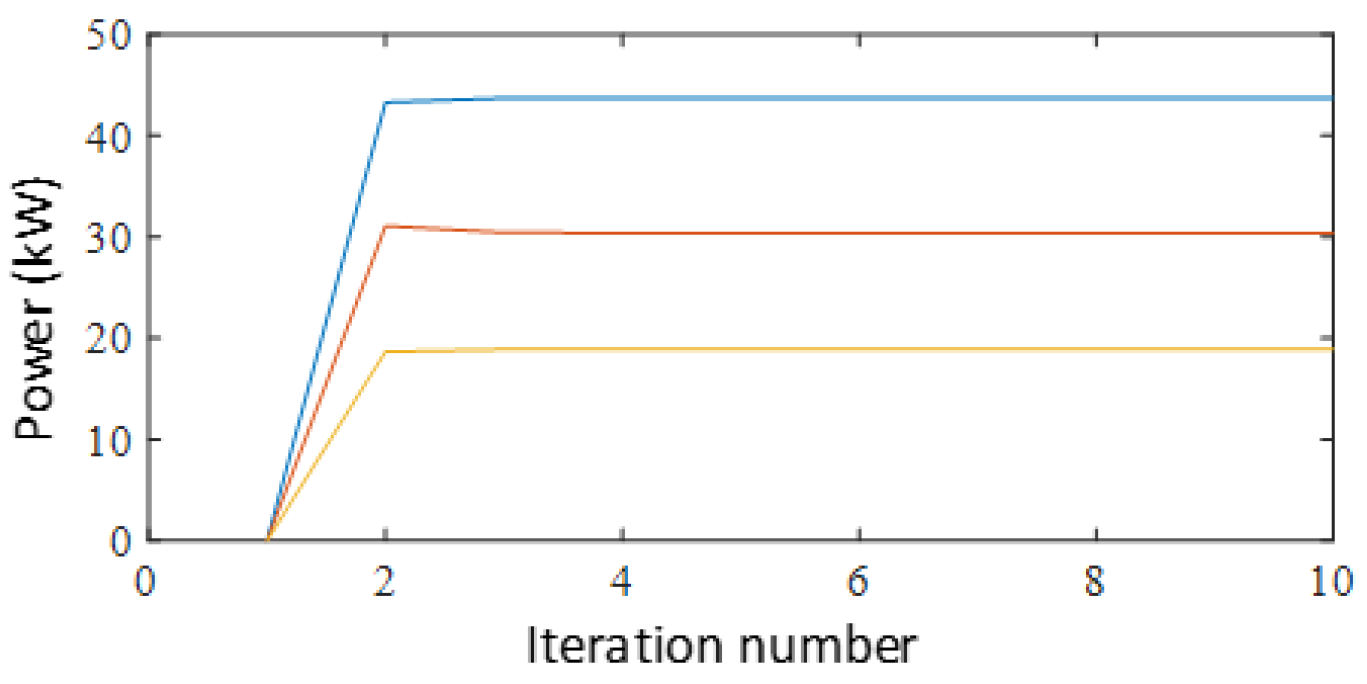
4.3.4. Case 2: Optimal Power Allocation
The results for optimal power allocation for case 2 are shown in
Table 5 and
Figure 11. In this case,
w1 >
w2 >
w3; therefore, the power allocated to MG1 is more than MG2. Despite of low value of
w for MG3, it gets allocated power equal to its shortage power. This is because of significantly low shortage power at MG3 and comparatively low difference between values of
w. The proposed method decides the power allocation according to the importance of load, rather than deciding power allocation based on size of the microgrid.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}