Fault Characteristic and Low Voltage Ride-Through Requirements Applicability Analysis for a Permanent Magnet Synchronous Generator-Based Wind Farm


Abstract
1. Introduction
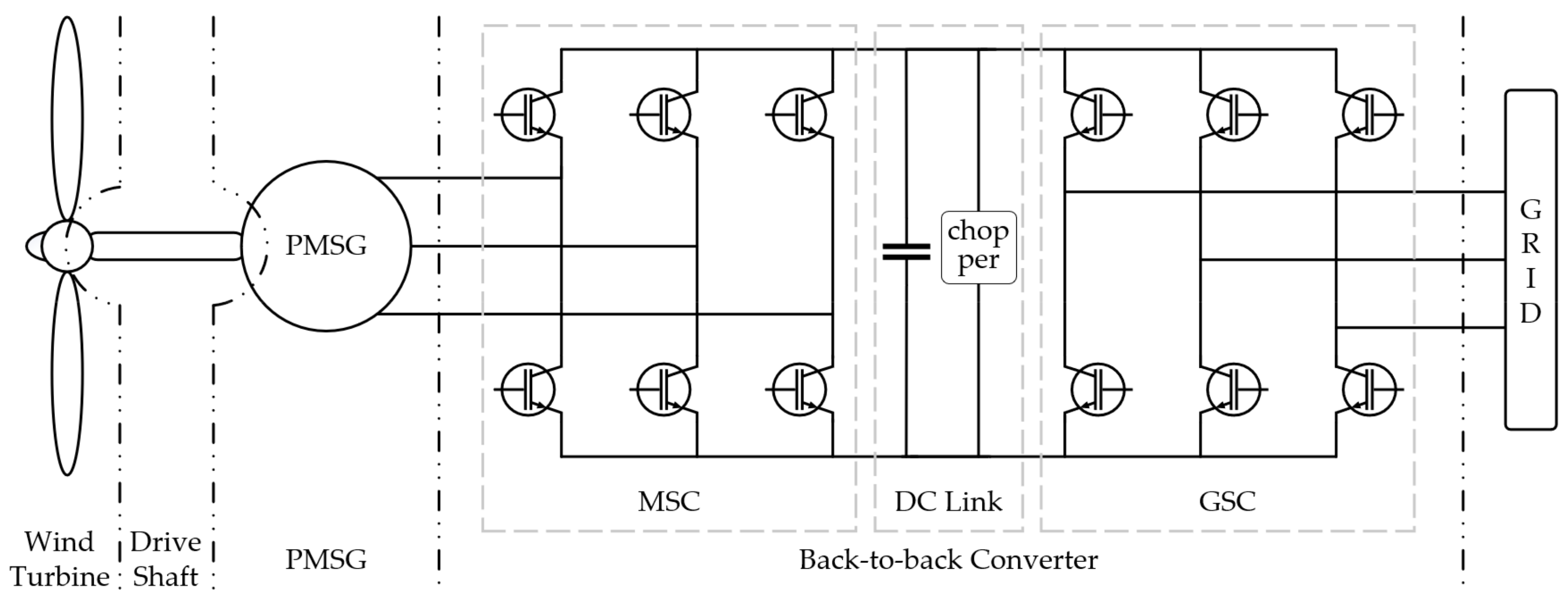
2. Modeling of a PMSG-Based WTG
2.1. Wind Turbine Modeling
2.2. Drive Shaft Modeling
2.3. PMSG Modeling
2.4. Back-to-Back Converter Modeling
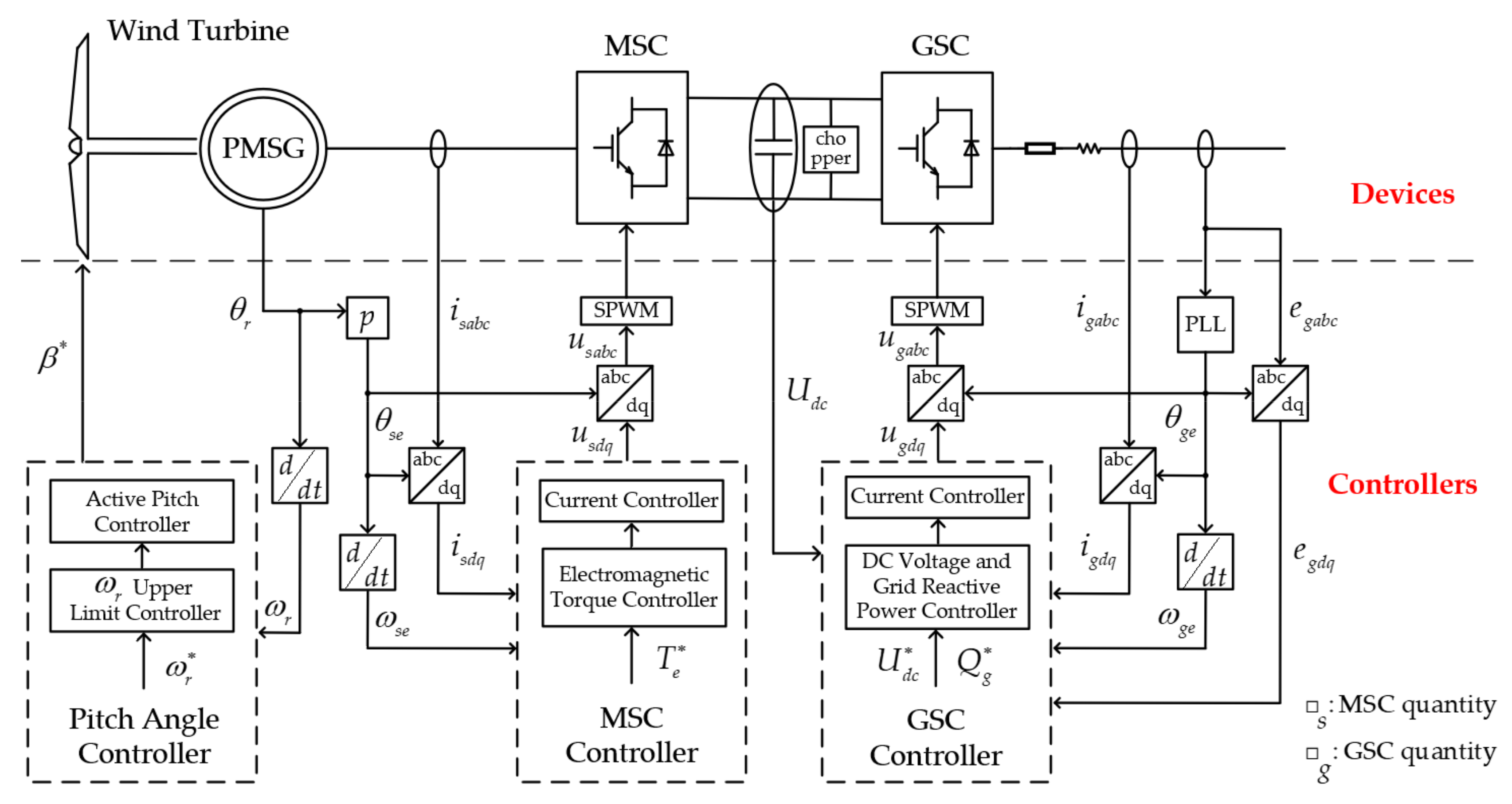
3. Control Strategy of a PMSG-Based WTG
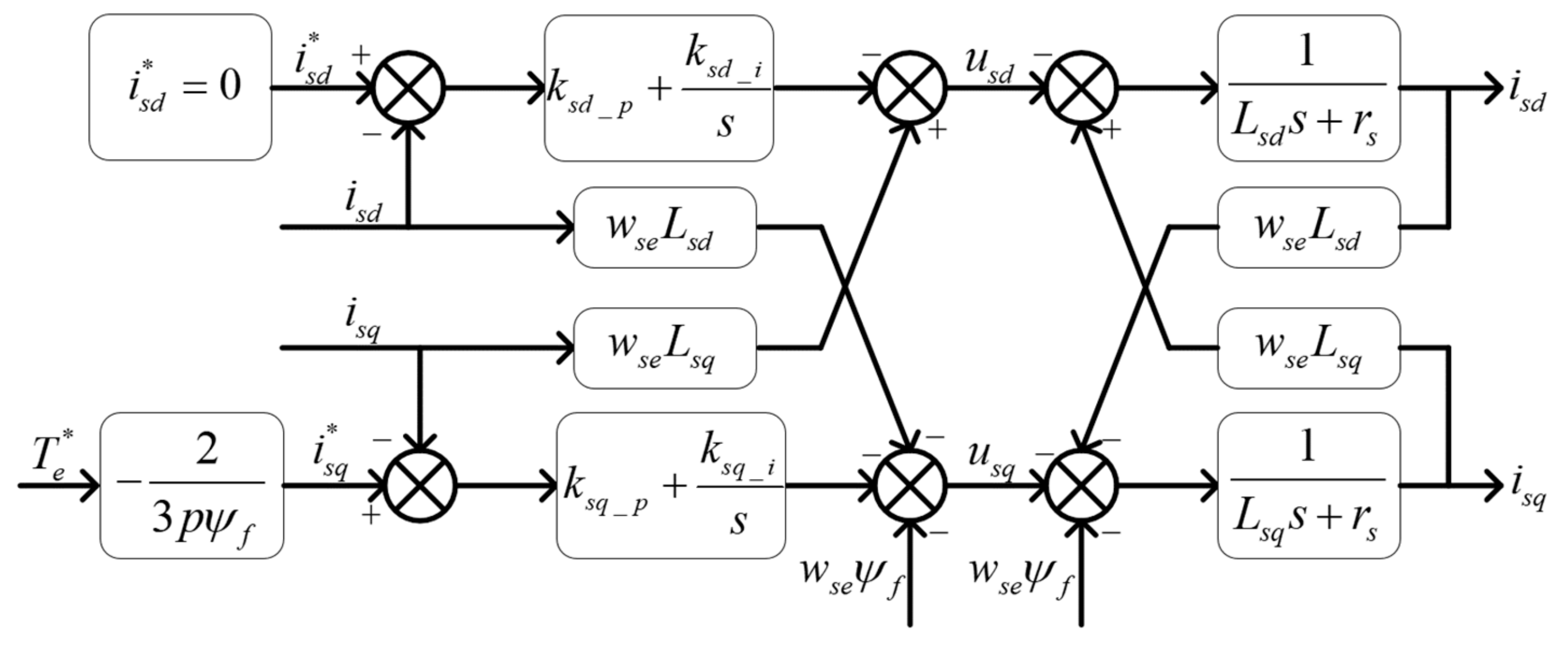
3.1. The Control Strategy of MSC
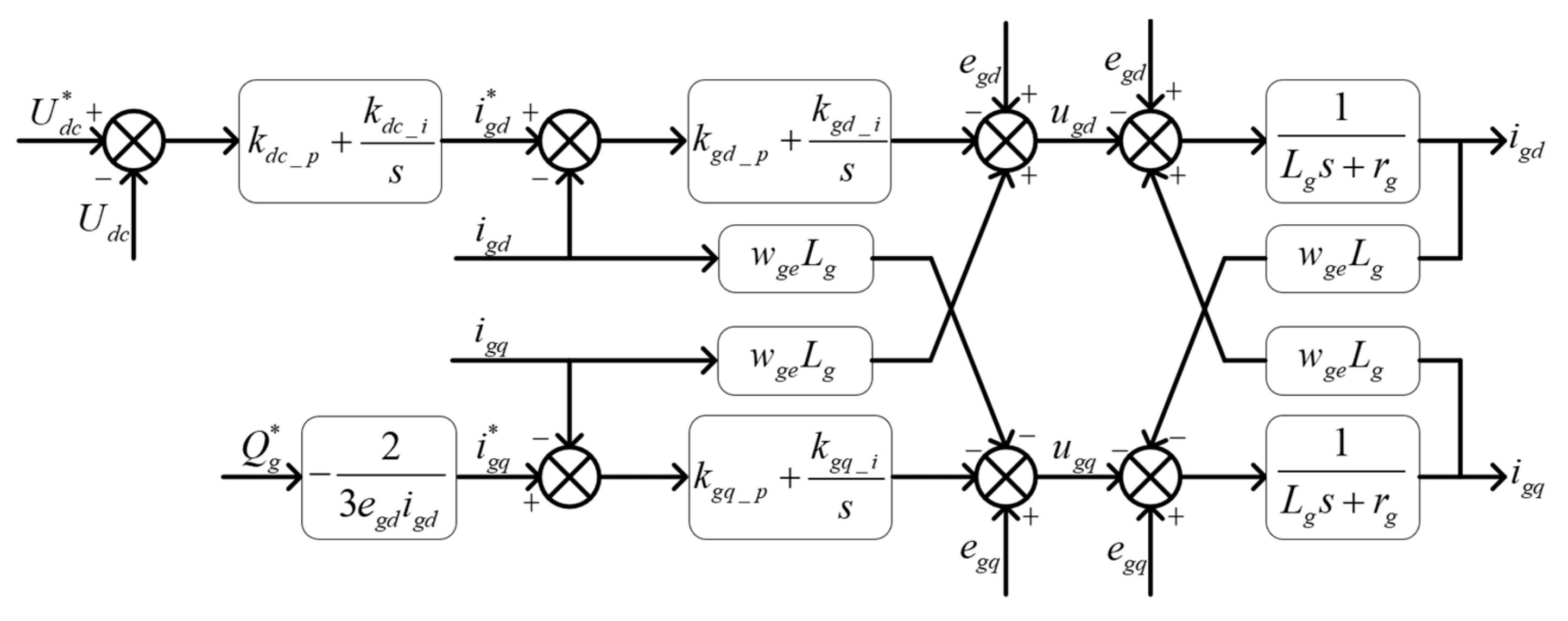
3.2. The Control Strategy of GSC
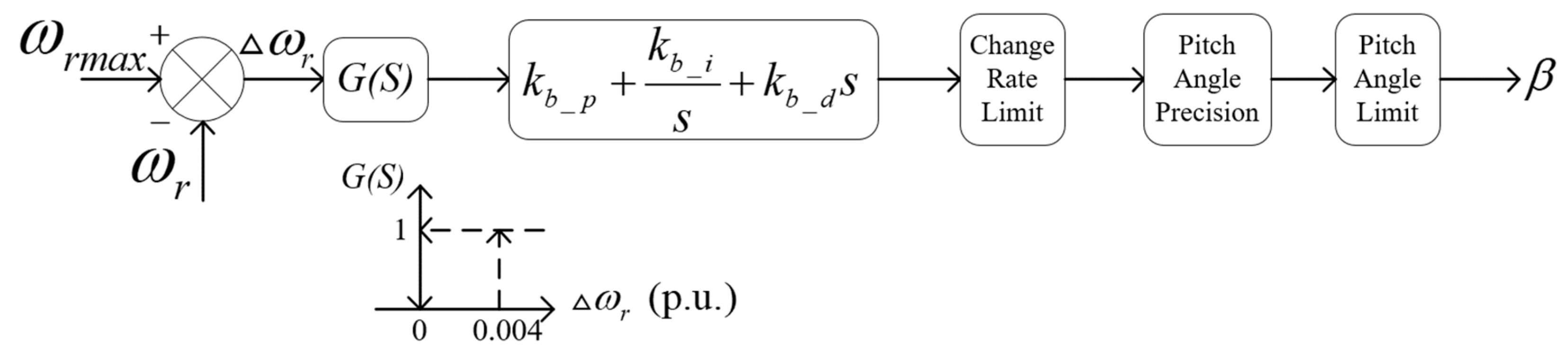
3.3. The Control Strategy of Pitch Angle
4. The Relay Protections of a PMSG-Based WTG
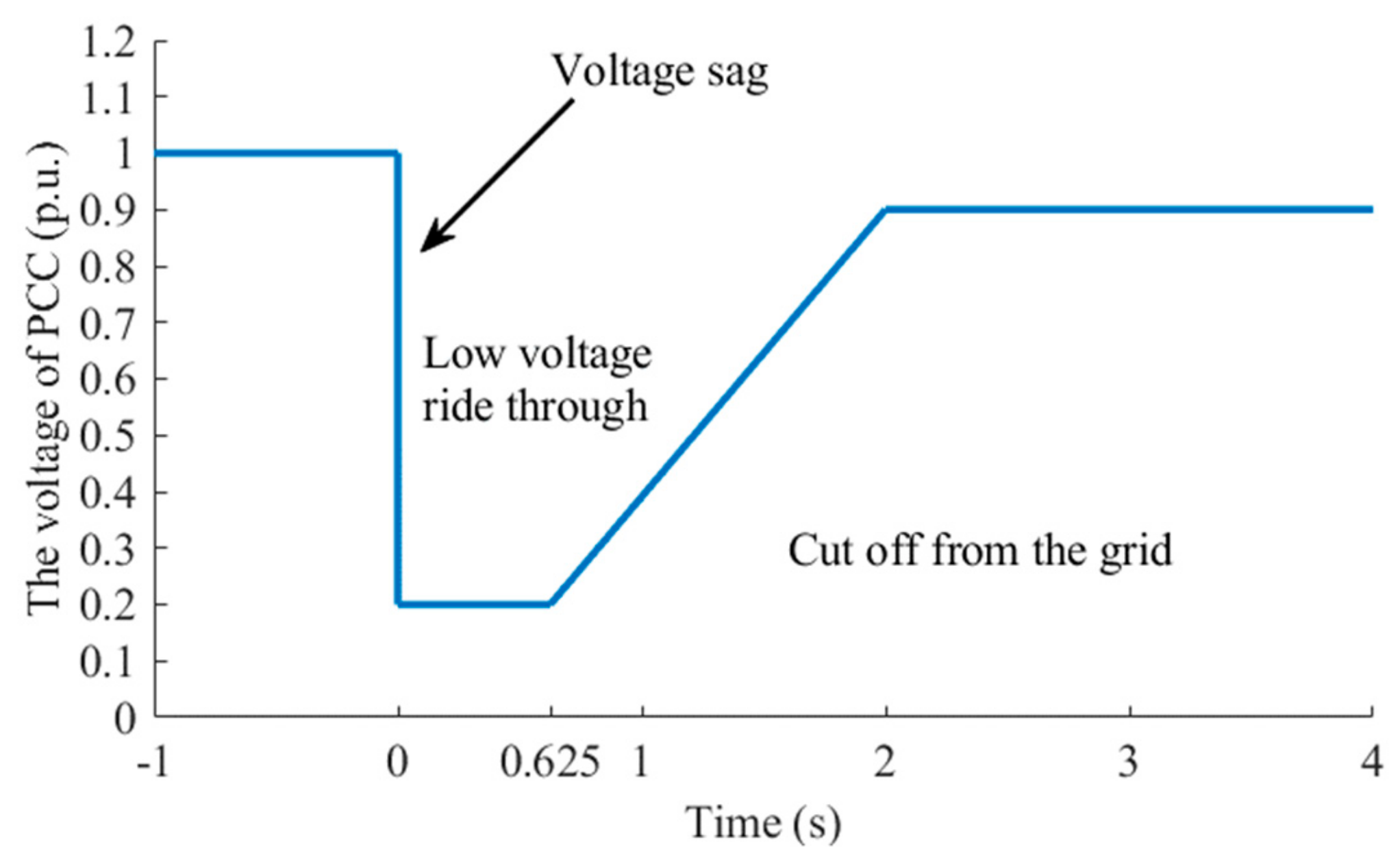
4.1. Low Voltage Ride-Through Requirement
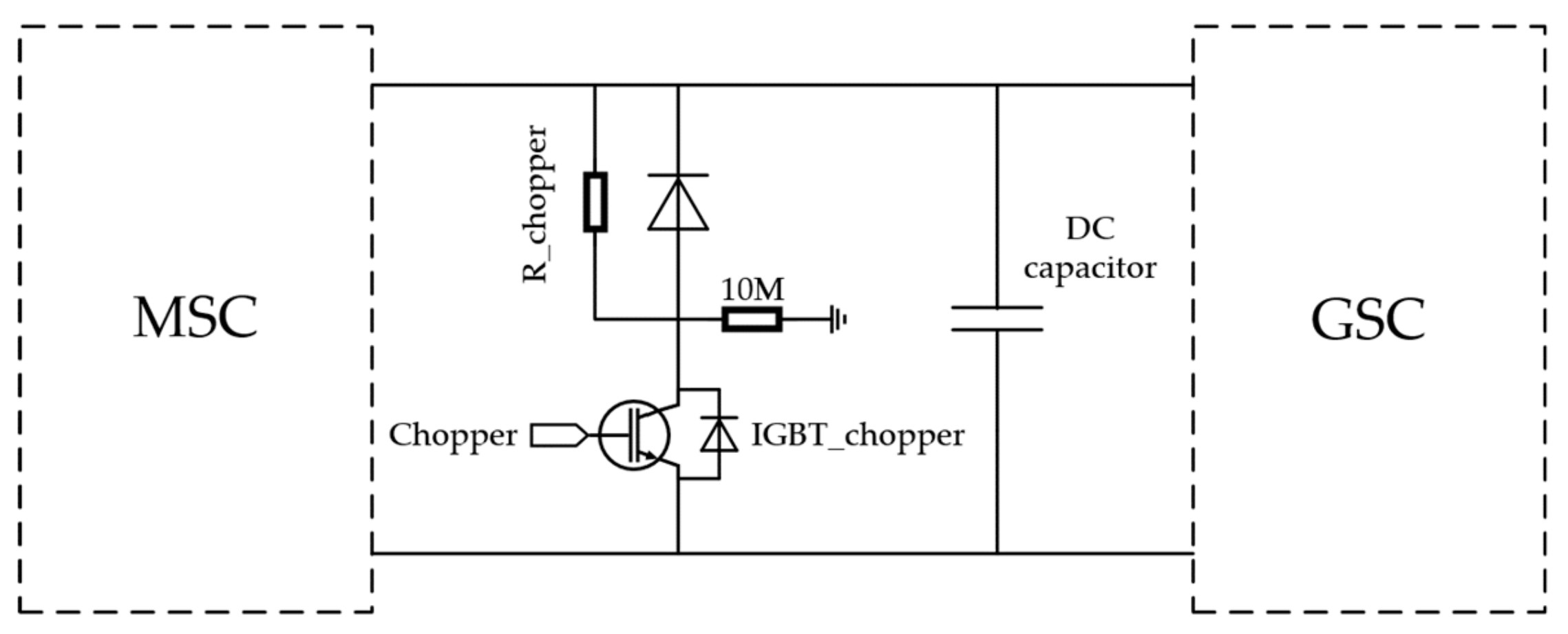
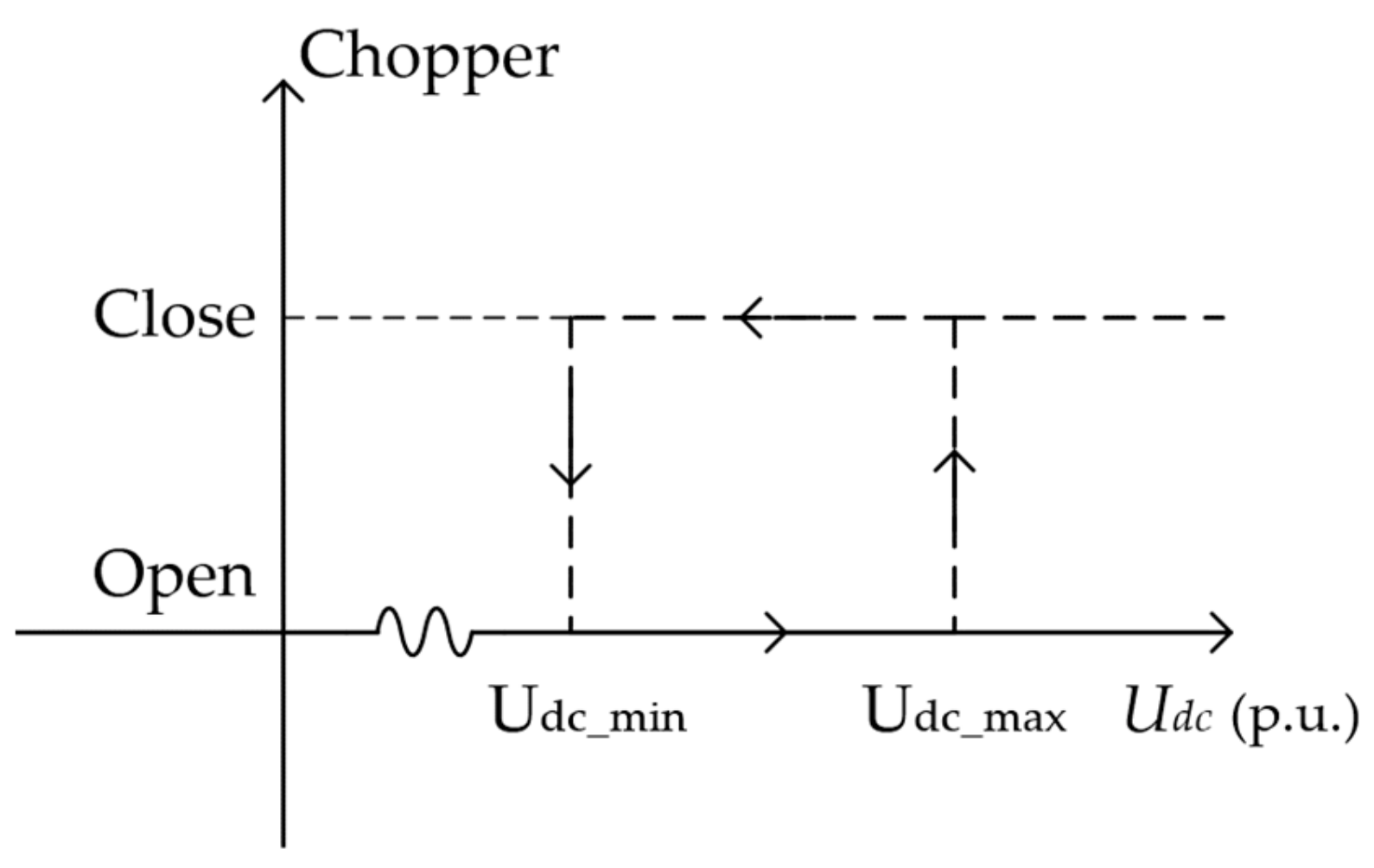
4.2. Chopper Protection
4.3. Overcurrent Protection in Converters
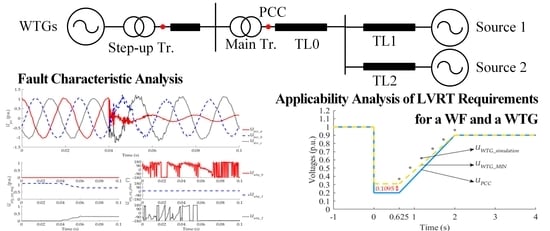
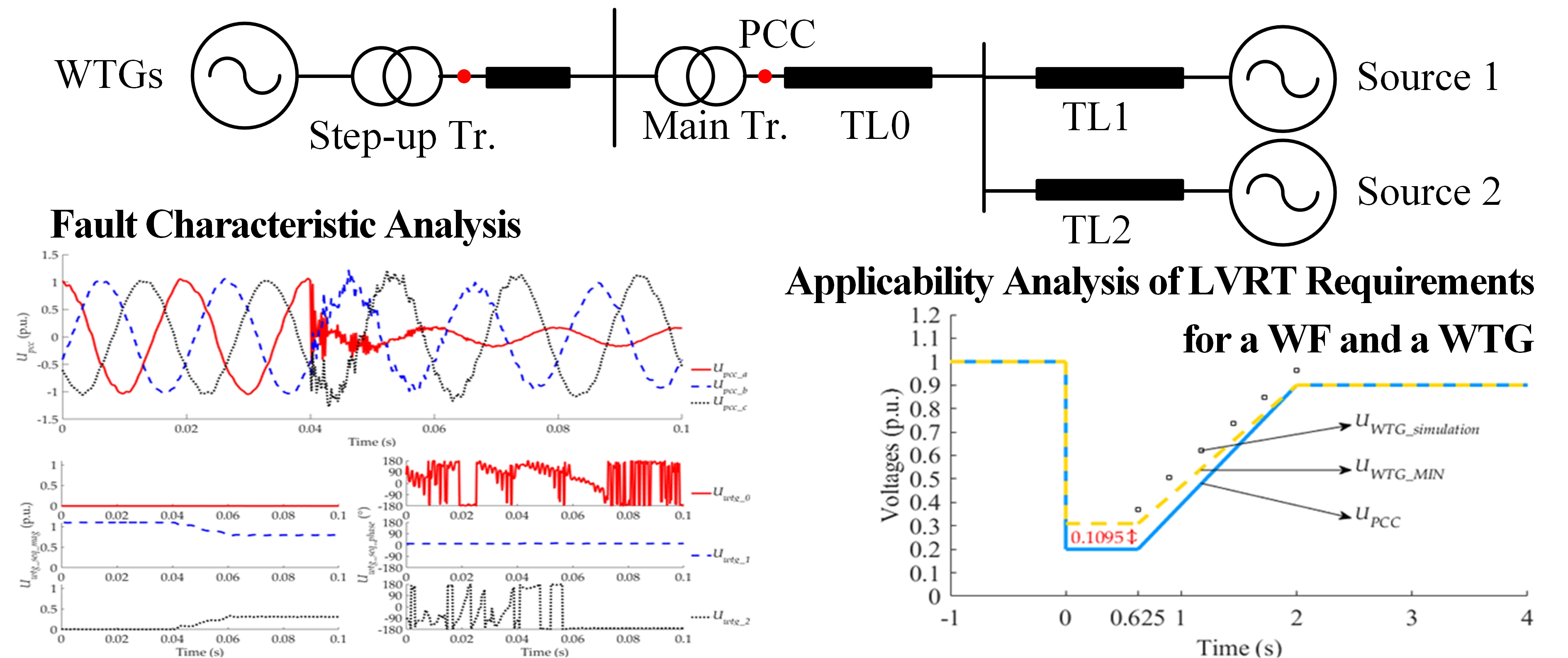
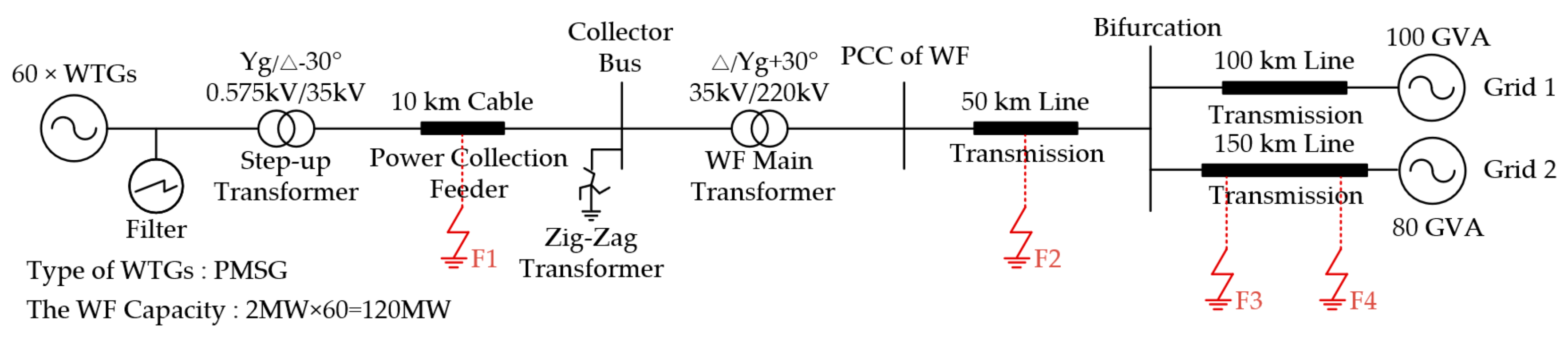
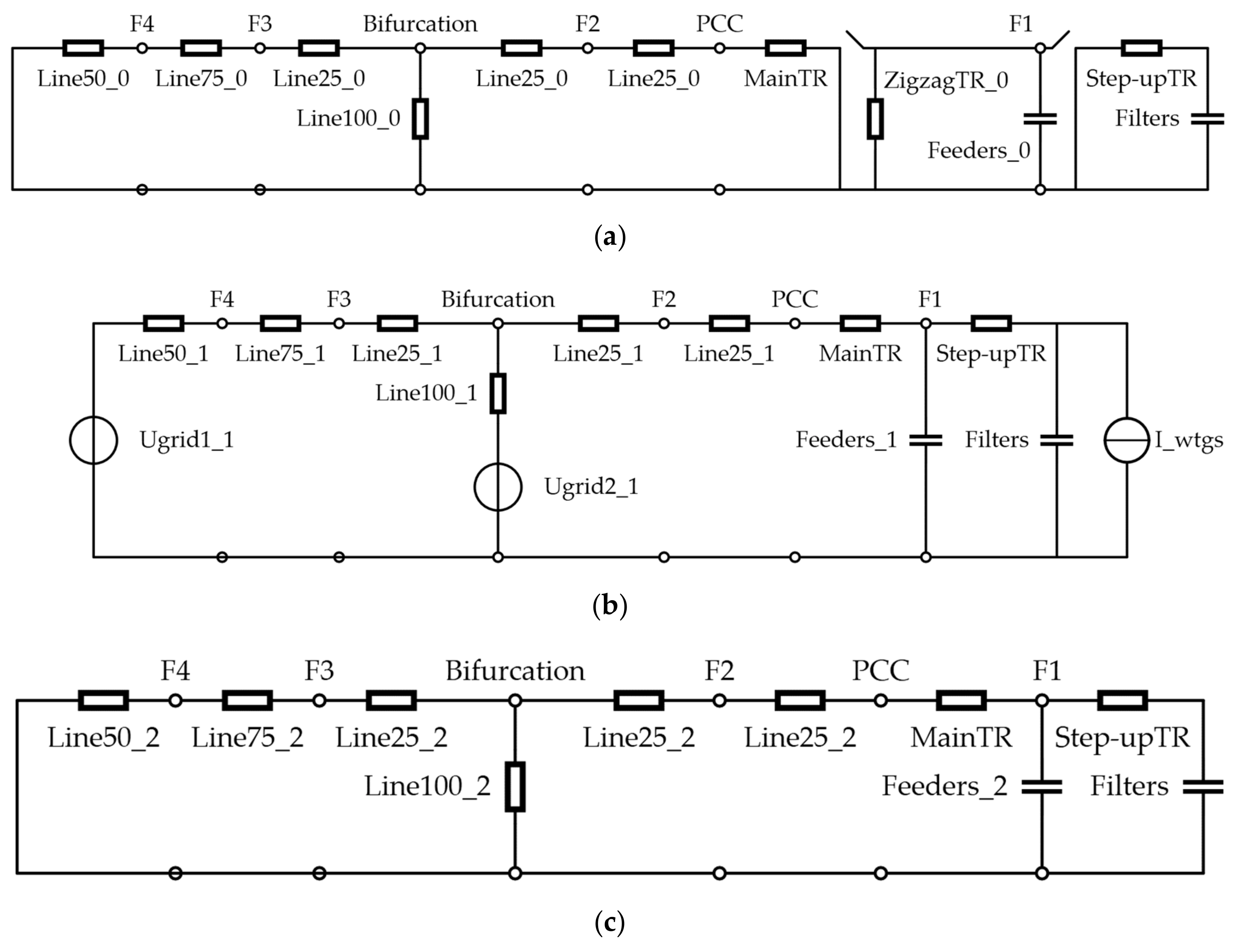
5. The Model System of a PMSG-based WF
6. Case Studies
6.1. Faults with Different Position
6.2. Faults with Different Type
6.3. Faults with Different Wind Speeds
7. Applicability Analysis of Low Voltage Ride-Through Requirements for a Whole WF and an Individual WTG
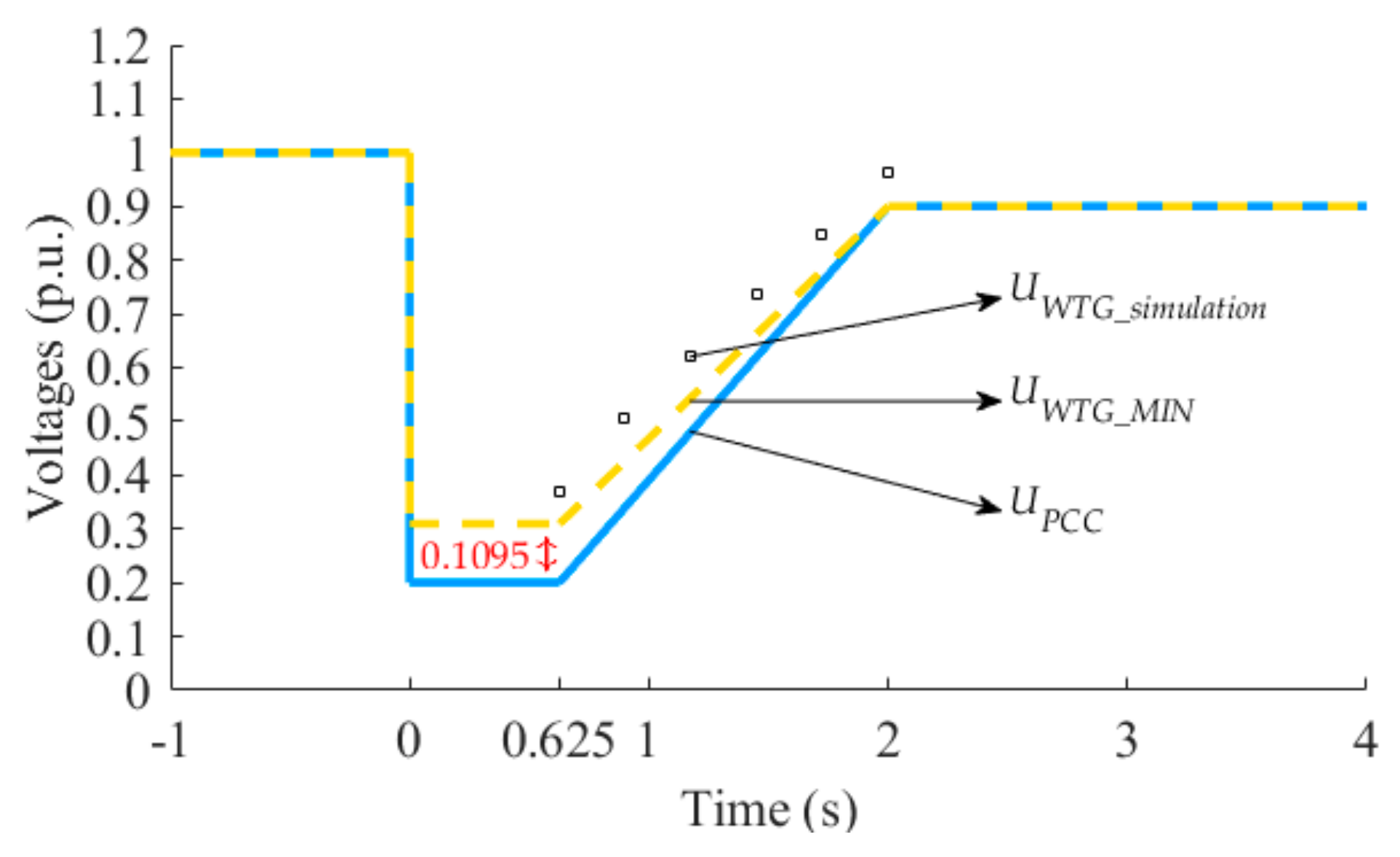
7.1. Discussion on the Minimal Grid-Connection Time
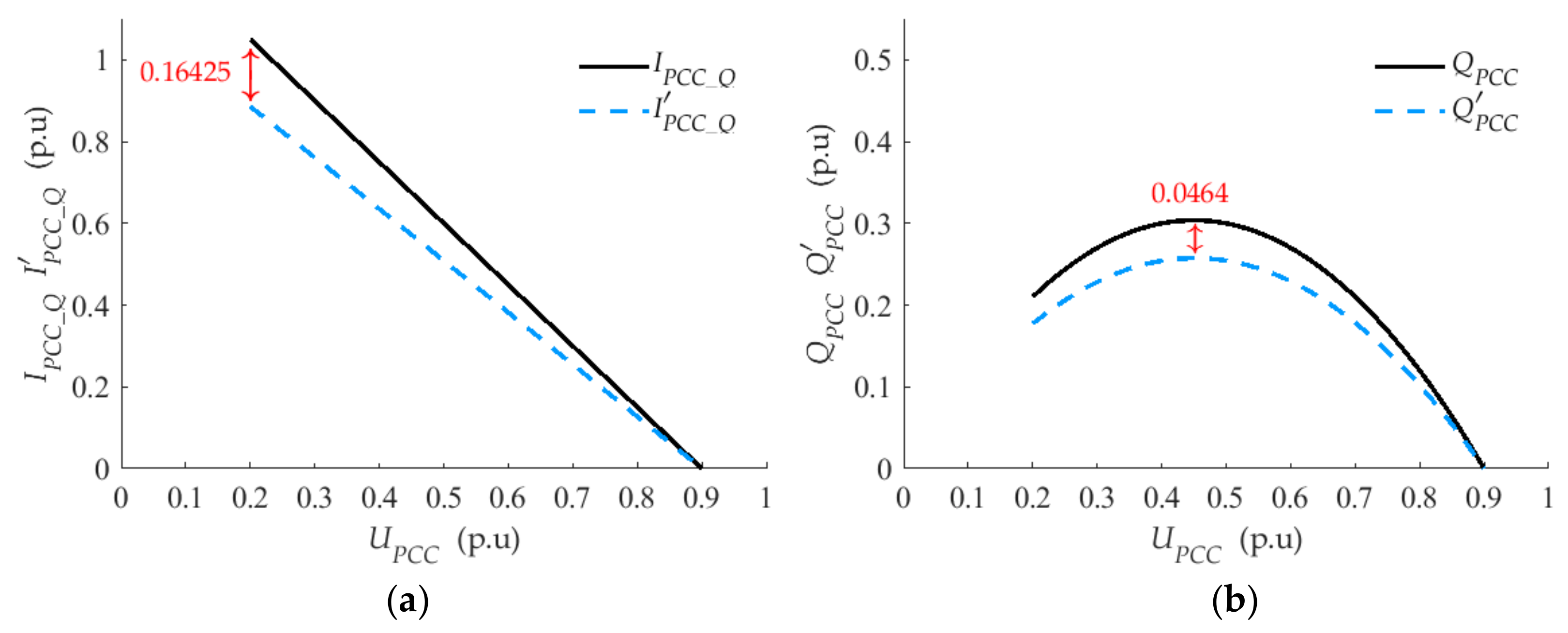
7.2. Discussion on the Minimal Reactive Current Support Ability
7.3. Summary of Applicability Analysis of LVRT Requirements
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wikipedia, The Free Encyclopedia. Copenhagen Climate Council. Available online: https://en.wikipedia.org/.wiki/Copenhagen_Climate_Council (accessed on 17 June 2018).
- Singer, S.; Denruyter, J.P.; Yener, D. The Energy Report: 100% Renewable Energy by 2050. Available online: http://www.worldwildlife.org (accessed on 22 February 2017).
- Sawyer, S. Global Wind Power: 2017 Market and Outlook to 2022. Available online: https://gwec.net/global-wind-power-2017-market-and-outlook-to-2022/ (accessed on 1 June 2018).
- Zheng, T.Y.; Cha, S.T.; Kim, Y.H.; Crossley, P.A.; Lee, S.H.; Kang, Y.C. Design and Evaluation of a Protection Relay for a Wind Generator Based on the Positive- and Negative-Sequence Fault Components. J. Electr. Eng. Technol. 2013, 8, 1029–1039. [Google Scholar] [CrossRef]
- Hu, S.J.; Li, J.L.; Xu, H.H. Modeling on converter of direct-driven WECS and its characteristic during voltage sags. In Proceedings of the 2008 IEEE International Conference on Industrial Technology, Chengdu, China, 21–24 April 2008; pp. 1–5. [Google Scholar]
- Huang, Y.H.; Wang, J.; Feng, Z.; Yang, Z.P.; Zhang, B.Y.; Li, G. Research on short-circuit fault characteristics of direct-drive permanent magnet wind turbine. In Proceedings of the 2011 International Conference on Electrical and Control Engineering, Yichang, China, 16–18 September 2011; pp. 4911–4914. [Google Scholar]
- Abedini, A.; Nasiri, A. PMSG Wind Turbine Performance Analysis During Short Circuit Faults. In Proceedings of the 2007 IEEE Canada Electrical Power Conference, Montreal, QC, Canada, 25–26 October 2007; pp. 160–165. [Google Scholar]
- Yazdani, A.; Iravani, R. A Neutral-Point Clamped Converter System for Direct-Drive Variable-Speed Wind Power Unit. IEEE Trans. Energy Convers. 2006, 21, 596–607. [Google Scholar] [CrossRef]
- Muyeen, S.M.; Takahashi, R.; Murata, T.; Tamura, J.; Ali, M.H. Transient stability analysis of permanent magnet variable speed synchronous wind generator. In Proceedings of the 2007 International Conference on Electrical Machines and Systems (ICEMS), Seoul, Korea, 8–11 October 2007; pp. 288–293. [Google Scholar]
- Song, G.B.; Wang, X.B.; Chang, Z.X.; Tang, J.S.; Liu, P.Y. A novel protection method of collecting power lines in PMSG wind farm. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; pp. 2086–2090. [Google Scholar]
- Wang, C.; Liu, X.; Chen, Z. Incipient Stator Insulation Fault Detection of Permanent Magnet Synchronous Wind Generators Based on Hilbert–Huang Transformation. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Freire, N.M.A.; Estima, J.O.; Marques Cardoso, A.J. Open-Circuit Fault Diagnosis in PMSG Drives for Wind Turbine Applications. IEEE Trans. Ind. Electron. 2013, 60, 3957–3967. [Google Scholar] [CrossRef]
- Jlassi, I.; Estima, J.O.; Khojet El Khil, S.; Mrabet Bellaaj, N.; Marques Cardoso, A.J. Multiple Open-Circuit Faults Diagnosis in Back-to-Back Converters of PMSG Drives for Wind Turbine Systems. IEEE Trans. Power Electron. 2015, 30, 2689–2702. [Google Scholar] [CrossRef]
- Jlassi, I.; Cardoso, A.J.M. IGBTs and current sensors fault diagnosis in direct-drive PSMG wind turbine systems using adaptive thresholds. In Proceedings of the IECON 2017 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 5072–5077. [Google Scholar]
- Hansen, A.D.; Michalke, G. Multi-pole permanent magnet synchronous generator wind turbines’ grid support capability in uninterrupted operation during grid faults. IET Renew. Power Gener. 2009, 3, 333–348. [Google Scholar] [CrossRef]
- Li, J.L.; Zhu, Y.; He, X.T.; Xu, H.H. Study on low voltage ride through characteristic of full power converter direct-drive wind power system. In Proceedings of the 2009 IEEE 6th International Power Electronics and Motion Control Conference, Wuhan, China, 17–20 May 2009; pp. 2213–2216. [Google Scholar]
- Nguyen, T.H.; Lee, D. Advanced Fault Ride-Through Technique for PMSG Wind Turbine Systems Using Line-Side Converter as STATCOM. IEEE Trans. Ind. Electron. 2013, 60, 2842–2850. [Google Scholar] [CrossRef]
- Erlich, I.; Bachmann, U. Grid code requirements concerning connection and operation of wind turbines in Germany. In Proceedings of the 2005 IEEE Power Engineering Society General Meeting, San Francisco, CA, USA, 12–16 June 2005; pp. 1253–1257. [Google Scholar]
- Iov, F.; Hansen, A.D.; Sørensen, P. Mapping of Grid Faults and Grid Codes; Tech. Rep. Risø-R-1617(EN); Risø National Laboratory, Technical University of Denmark: Roskilde, Denmark, 2007. [Google Scholar]
- Technical rule for connecting wind farm to power system, PRC National Standard GB/T 19963-2011, 2012. Available online: http://www.gb688.cn/bzgk/gb/newGbInfo?hcno=C0B59C55FD4B287CDF02842D074D1476 (accessed on 30 December 2011).
- Wind turbines—Test procedure of voltage fault ride through capability, PRC National Standard GB/T 36995-2018, 2019. Available online: http://www.gb688.cn/bzgk/gb/newGbInfo?hcno=A9D6F07EB8A70DEFA2974C513C6F3325 (accessed on 28 December 2018).
- Knudsen, T.; Bak, T.; Svenstrup, M. Survey of wind farm control-power and fatigue optimization. Wind Energy 2015, 18, 1333–1351. [Google Scholar] [CrossRef]
- Boersma, S.; Doekemeijer, B.M.; Gebraad, P.M.; Fleming, P.A.; Annoni, J.; Scholbrock, A.K.; van Wingerden, J.W. A tutorial on control-oriented modeling and control of wind farms. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 1–18. [Google Scholar]
- Abo-Khalil, A.G.; Lee, D.C. Dynamic modeling and control of wind turbines for grid-connected wind generation system. In Proceedings of the 2006 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006. [Google Scholar]
- Yan, G.G.; Wei, Z.C.; Mu, G. Dynamic Modeling and Control of Directly-driven Permanent Magnet Synchronous Generator Wind Turbine. In Proceedings of the 2009 Chinese Society of Universities for Electric Power System and its Automation, Nantong, China, 21–23 August 2009; Volume 21, pp. 34–39. [Google Scholar]
- Datta, R.; Ranganathan, V.T. A method of tracking the peak power points for a variable speed wind energy conversion system. IEEE Trans. Energy Conv. 2003, 18, 163–168. [Google Scholar] [CrossRef]
- Shen, B.; Mwinyiwiwa, B.; Zhang, Y.Z. Sensorless Maximum Power Point Tracking of Wind by DFIG Using Rotor Position Phase Lock Loop (PLL). IEEE Trans. Power Electron. 2009, 24, 942–951. [Google Scholar] [CrossRef]
- Zhao, R.D.; Wang, Y.J.; Zhang, J.S. Maximum Power Point Tracking Control of the Wind Energy Generation System with Direct-driven Permanent Magnet Synchronous Generators. J. Chin. Electr. Eng. Sci. 2009, 29, 106–111. [Google Scholar]
- Chinchilla, M.; Arnaltes, S.; Burgos, J.C. Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid. IEEE Trans. Energy Convers. 2006, 21, 130–135. [Google Scholar] [CrossRef]
- Haque, M.E.; Negnevitsky, M.; Muttaqi, K.M. A Novel Control Strategy for a Variable-Speed Wind Turbine with a Permanent-Magnet Synchronous Generator. IEEE Trans. Ind. Appl. 2010, 46, 331–339. [Google Scholar] [CrossRef]
- Chung, S.K. A phase tracking system for three phase utility interface inverters. IEEE Trans. Power Electron. 2000, 15, 431–438. [Google Scholar] [CrossRef]
- Conroy, J.F.; Watson, R. Low-voltage ride-through of a full converter wind turbine with permanent magnet generator. IET Renew. Power Gener. 2007, 1, 182–189. [Google Scholar] [CrossRef]
- Cai, X.; Li, Z. Dynamic Modeling of Wind Turbines and Wind Farms; Science Press: Beijing, China, 2006; pp. 240–243. ISBN 978-7-03-049126-8. [Google Scholar]
- Reichard, M.L.; Finney, D.; Garrity, J.T. Windfarm system protection using peer-to-peer communications. In Proceedings of the 2007 60th Annual Conference for Protective Relay Engineers, College Station, TX, USA, 27–29 March 2007. [Google Scholar]
- Hornak, D.; Chau, N.H.J. Green power—Wind generated protection and control considerations. In Proceedings of the 57th Annual Conference for Protective Relay Engineers, College Station, TX, USA, 1 April 2004; pp. 110–131. [Google Scholar]
- Causebrook, A.; Atkinson, D.J.; Jack, A.G. Fault Ride-Through of Large Wind Farms Using Series Dynamic Braking Resistors (March 2007). IEEE Trans. Power Syst. 2008, 22, 966–975. [Google Scholar] [CrossRef]
- Molinas, M.; Suul, J.A.; Undeland, T. Low Voltage Ride Through of Wind Farms with Cage Generators: STATCOM Versus SVC. IEEE Trans. Power Electron. 2008, 23, 1104–1117. [Google Scholar] [CrossRef]
- Mohseni, M.; Islam, S.; Masoum, M.A.S. Low voltage ride-through requirements at the PCC versus wind generator terminals. In Proceedings of the 2010 20th Australasian Universities Power Engineering Conference, Christchurch, New Zealand, 5–8 December 2010; pp. 1–6. [Google Scholar]
- Gomis-Bellmunt, O.; Junyent-FerrÉ, A.; Sumper, A.; Bergas-JanÉ, J. Ride-Through Control of a Doubly Fed Induction Generator Under Unbalanced Voltage Sags. IEEE Trans. Energy Convers. 2008, 23, 1036–1045. [Google Scholar] [CrossRef]


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type | Assessment Voltages |
|---|---|
| 3P | Line voltages |
| LL or DLG | Line voltages |
| SLG | Phase voltages |
| Line Type | Zero-Sequence | Positive/Negative-Sequence | ||||
|---|---|---|---|---|---|---|
| R (Ω/km) | XL (Ω/km) | BC (10−6 S/km) | R (Ω/km) | XL (Ω/km) | BC (10−6 S/km) | |
| Cable | 0.1260 | 0.3300 | 87.965 | 0.0420 | 0.1100 | 87.965 |
| Transmission line | 0.3000 | 0.9425 | 2.5133 | 0.0200 | 0.2827 | 3.9584 |
| Scenario | Case No. | Fault Position | Fault Type | Wind Speed (m/s) Under Fault | Figure |
|---|---|---|---|---|---|
| Different Fault Position | Case 1 | F1 | SLG fault | 11.78 | Figure 11 |
| Case 2 | F2 | SLG fault | 11.78 | Figure 12 | |
| Case 3 | F3 | SLG fault | 11.78 | Figure 13 | |
| Case 4 | F4 | SLG fault | 11.78 | Figure 14 | |
| Different Fault Type | Case 4 | F4 | SLG fault | 11.78 | Figure 14 |
| Case 5 | F4 | LL fault | 11.78 | Figure 15 | |
| Case 6 | F4 | 3P fault | 11.78 | Figure 16 | |
| Different Wind Speed Under Fault | Case 4 | F4 | SLG fault | 11.78 | Figure 14 |
| Case 7 | F4 | SLG fault | 14 | Figure 17 | |
| Case 8 | F4 | SLG fault | 9 | Figure 18 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Zheng, T.; Han, J. Fault Characteristic and Low Voltage Ride-Through Requirements Applicability Analysis for a Permanent Magnet Synchronous Generator-Based Wind Farm. Energies 2019, 12, 3400. https://doi.org/10.3390/en12173400
Chen W, Zheng T, Han J. Fault Characteristic and Low Voltage Ride-Through Requirements Applicability Analysis for a Permanent Magnet Synchronous Generator-Based Wind Farm. Energies. 2019; 12(17):3400. https://doi.org/10.3390/en12173400
Chicago/Turabian StyleChen, Wei, Taiying Zheng, and Junfei Han. 2019. "Fault Characteristic and Low Voltage Ride-Through Requirements Applicability Analysis for a Permanent Magnet Synchronous Generator-Based Wind Farm" Energies 12, no. 17: 3400. https://doi.org/10.3390/en12173400
APA StyleChen, W., Zheng, T., & Han, J. (2019). Fault Characteristic and Low Voltage Ride-Through Requirements Applicability Analysis for a Permanent Magnet Synchronous Generator-Based Wind Farm. Energies, 12(17), 3400. https://doi.org/10.3390/en12173400