Fault-Tolerant Control of Doubly-Fed Wind Turbine Generation Systems under Sensor Fault Conditions

Abstract
:1. Introduction
2. Problem Description
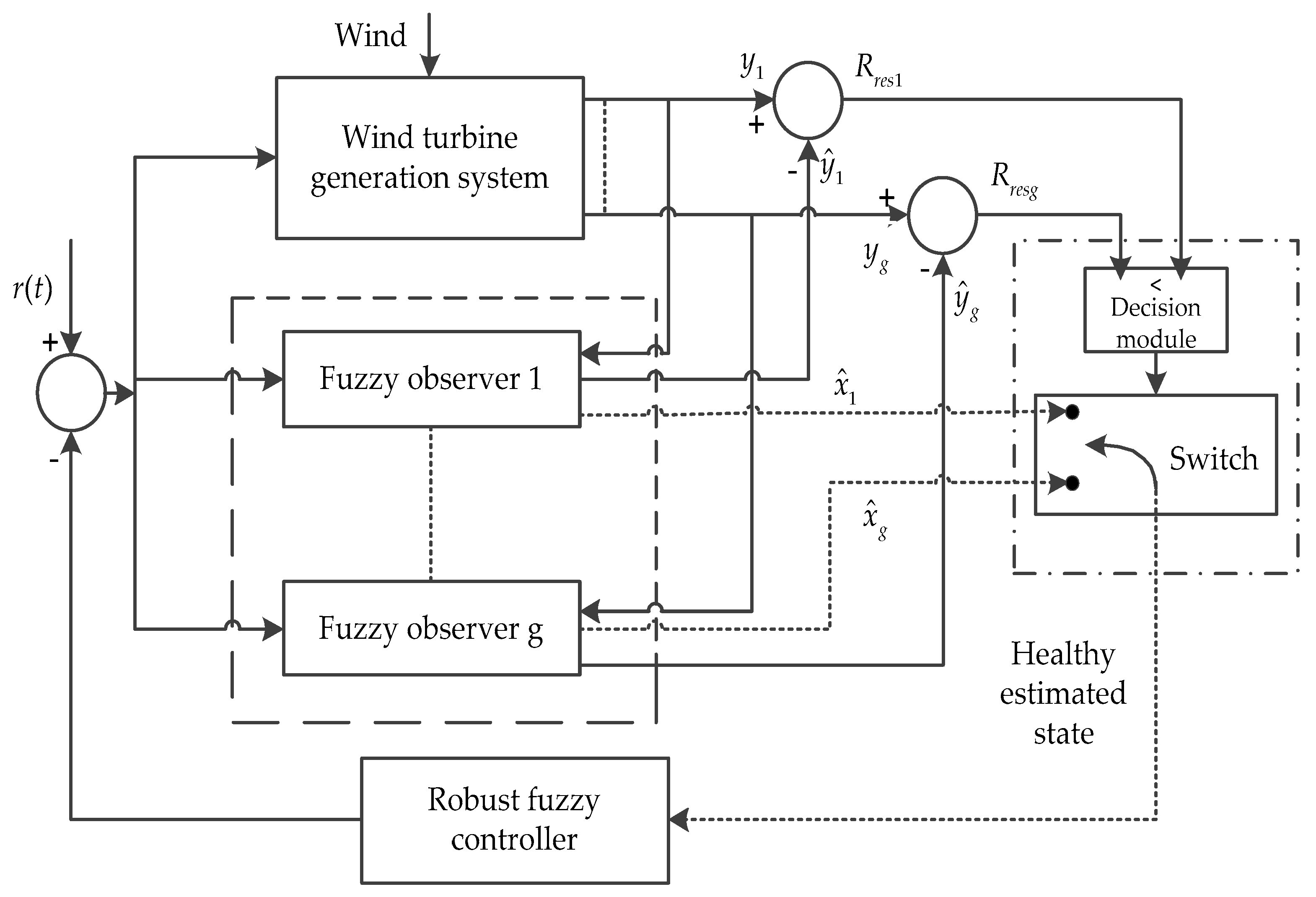
3. FDI Design Based on T-S Fuzzy Observer
- (1)
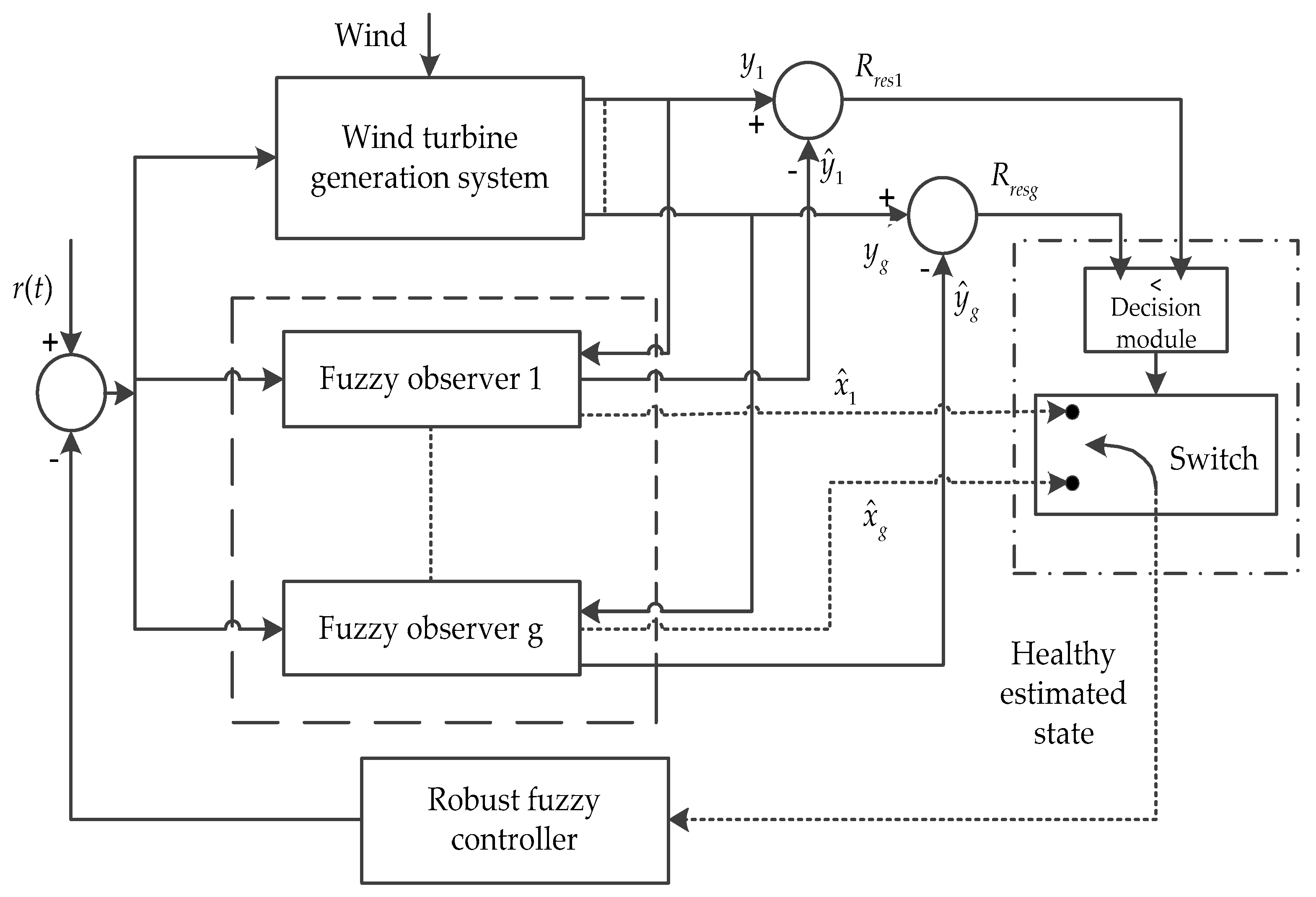
- The output residual of the system is produced according to the designed T-S fuzzy observer, and the output signal of the sensor is taken as the input signal of the fuzzy observer. Then the observation value of the observer is compared with the actual sensor output and the residual error is calculated.
- (2)
- The residual are compared with the residual threshold , which are fuzzy observer1 and the output residuals of the fuzzy observer , respectively. The logic division of the residual error is used to judge whether the system has sensor fault. Finally, the state reconstruction of the output based on normal sensor and observer is selected by the decision module and switcher.
4. Robust Fuzzy Controller
4.1. State Feedback Controller Design
4.2. Stability Analysis of Nonlinear Closed-Loop Systems
5. Mathematical Model of Wind Turbine Generation System
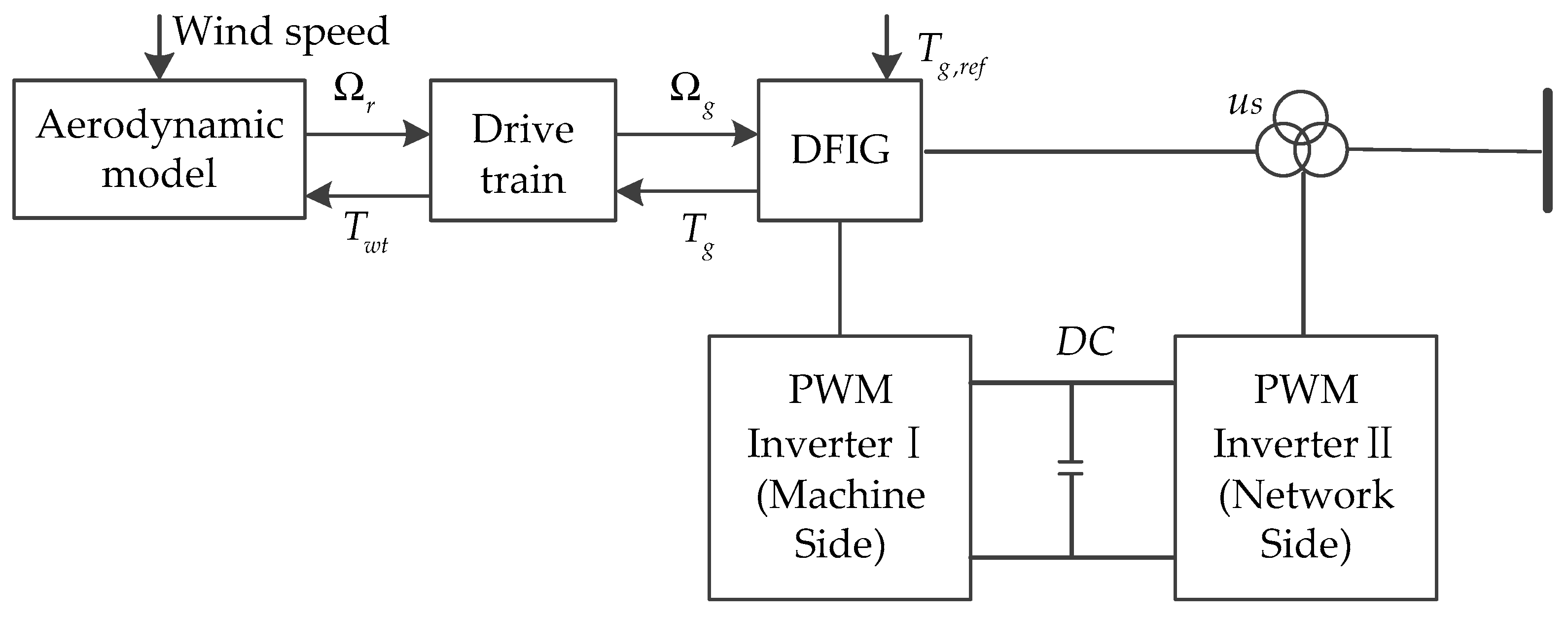
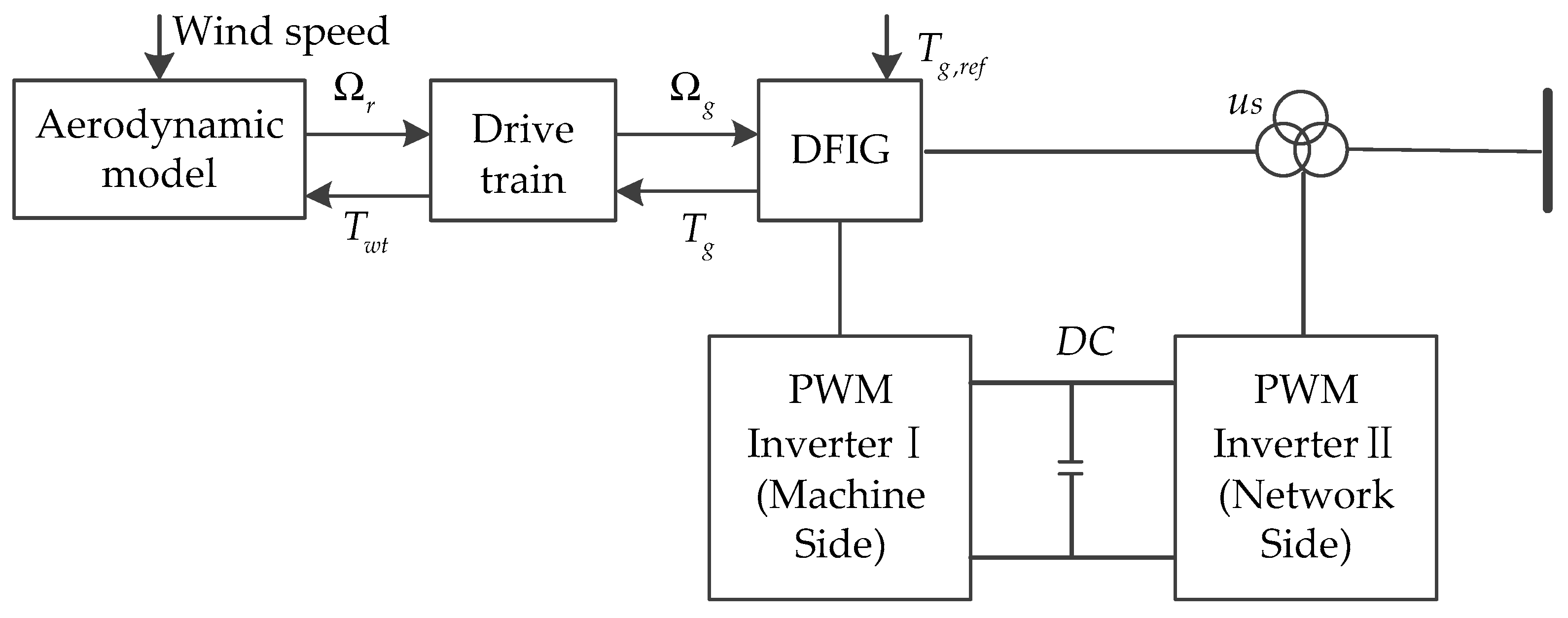
5.1. Dynamic Equation of Doubly-Fed Wind Turbine Generation System
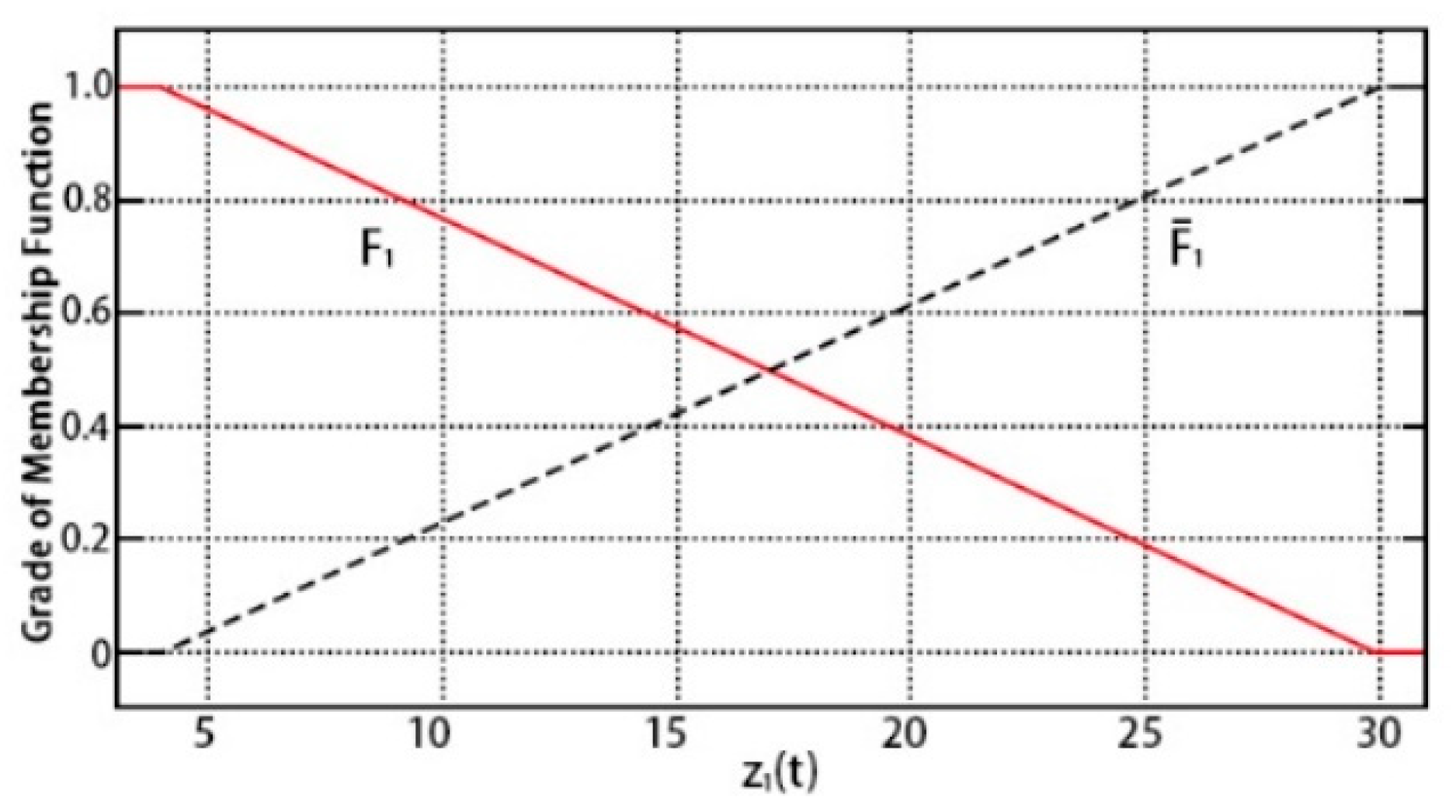
5.2. T-S Fuzzy Modeling of Doubly-Fed Wind Turbine Generation System
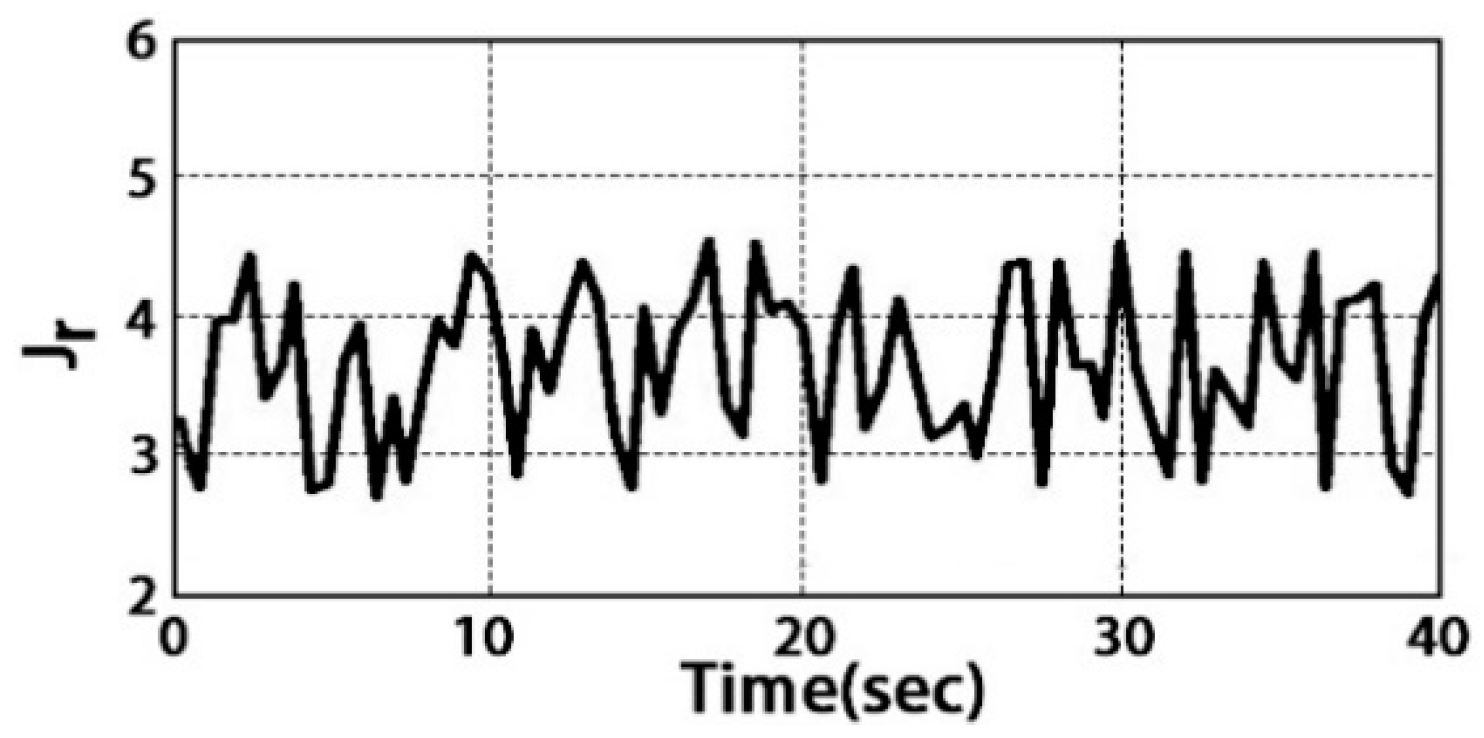
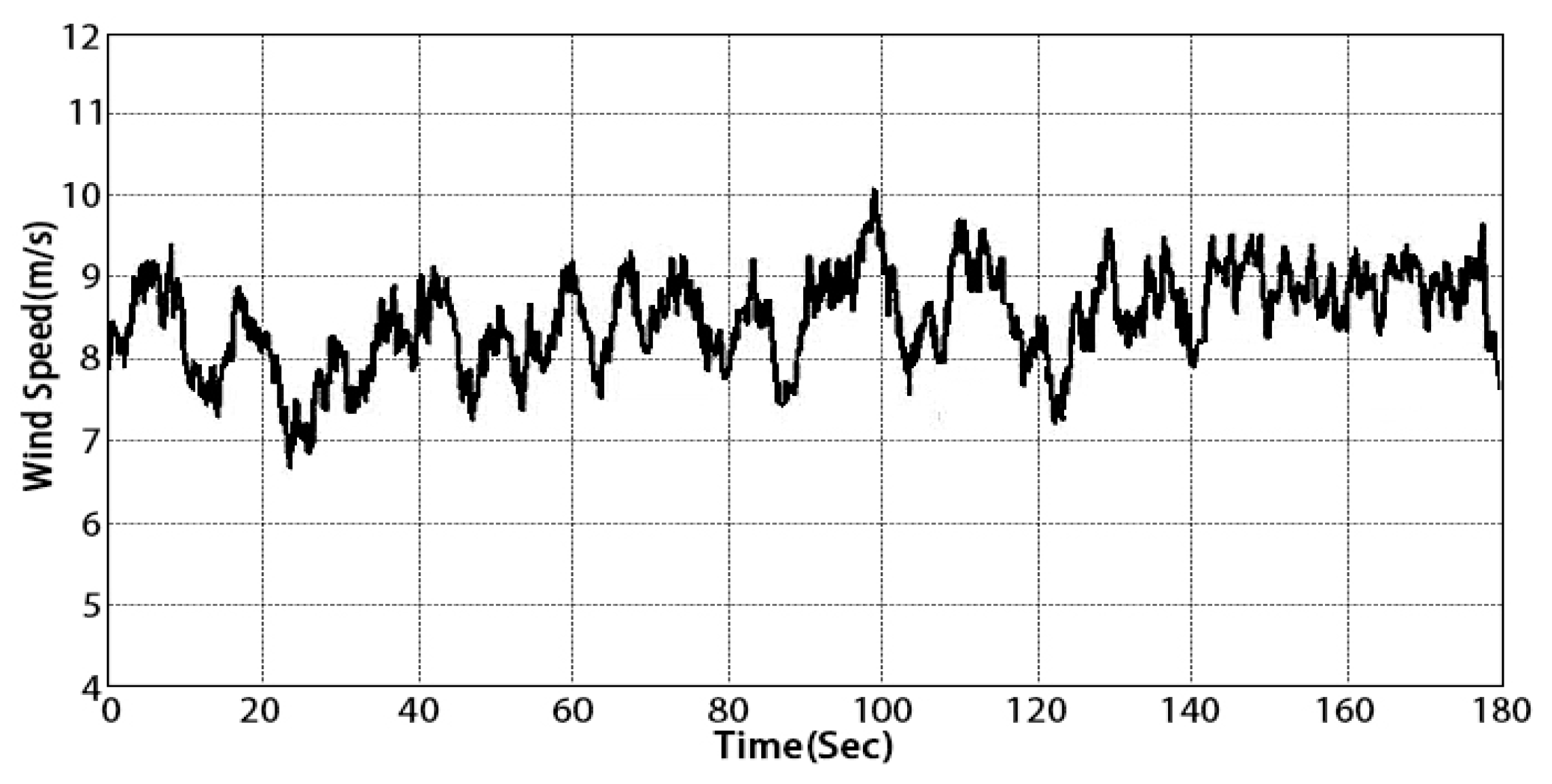
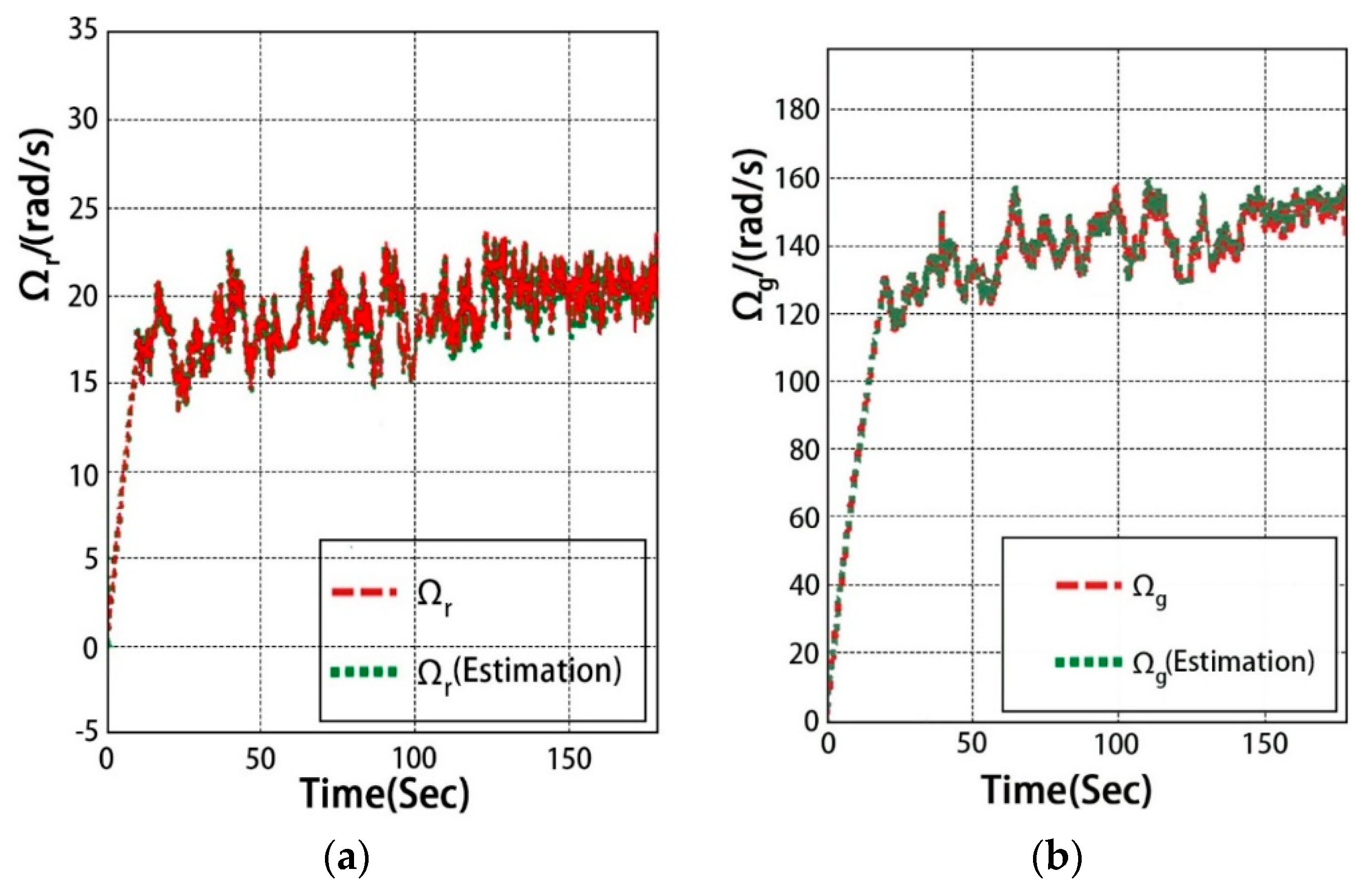
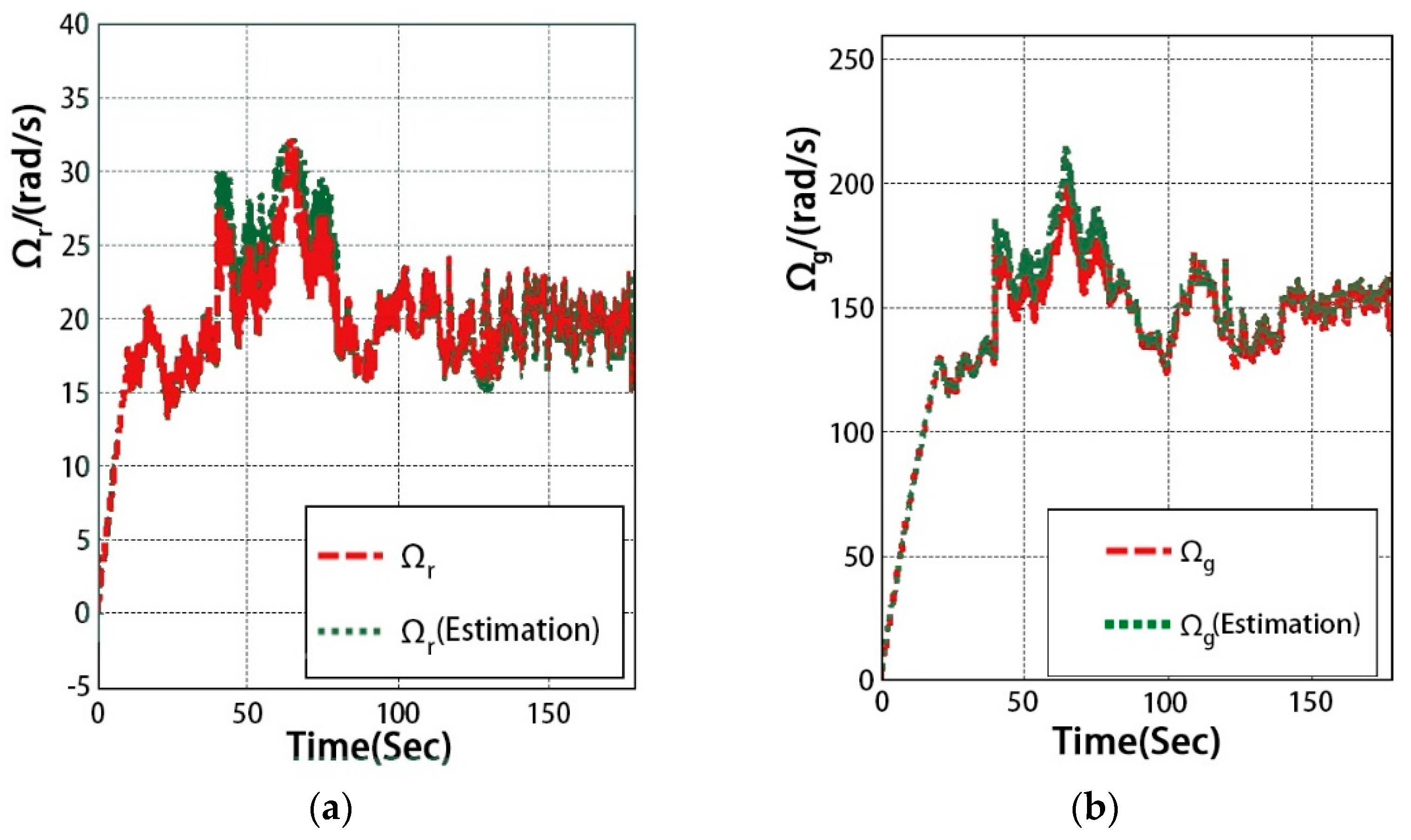
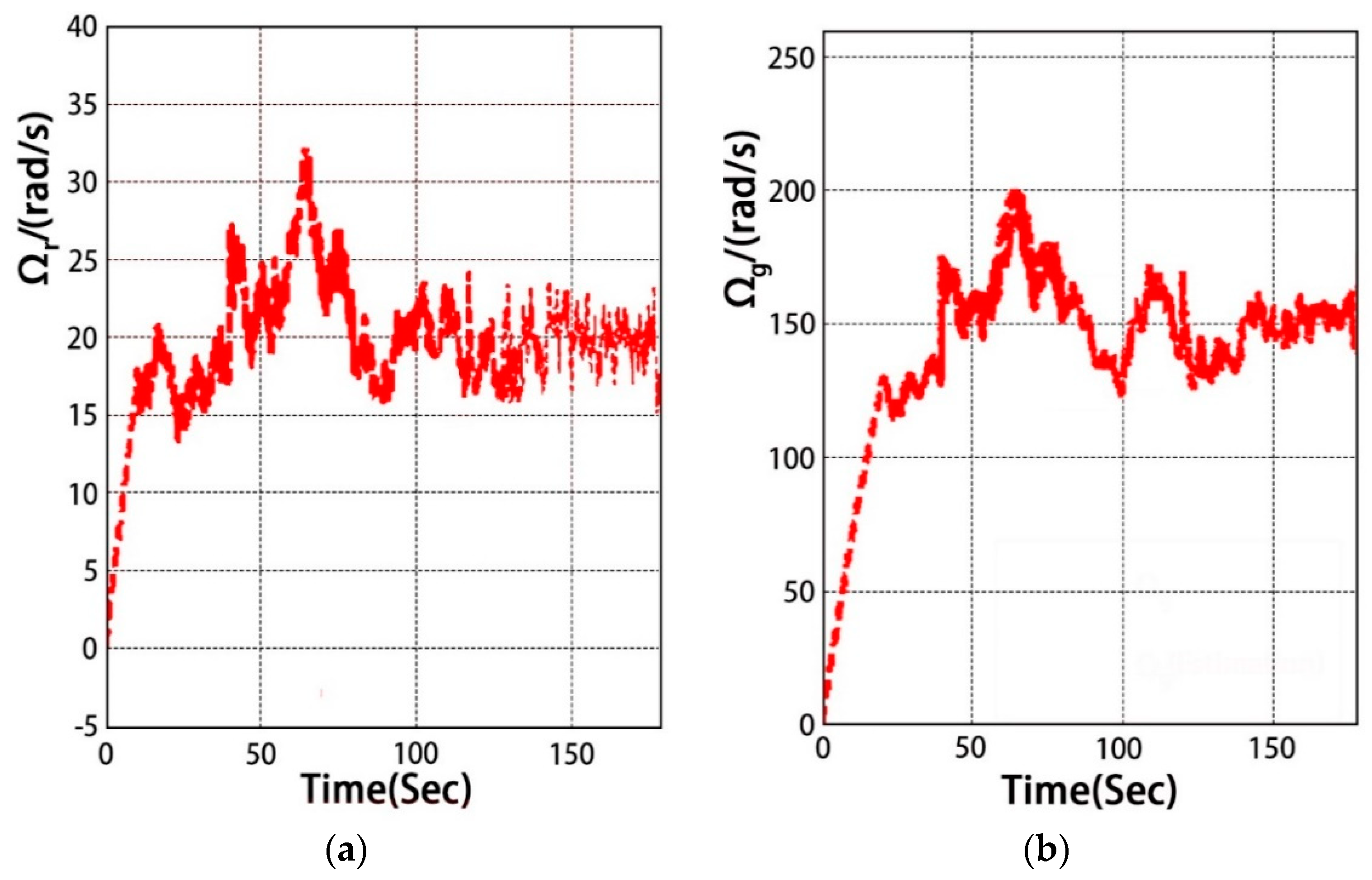
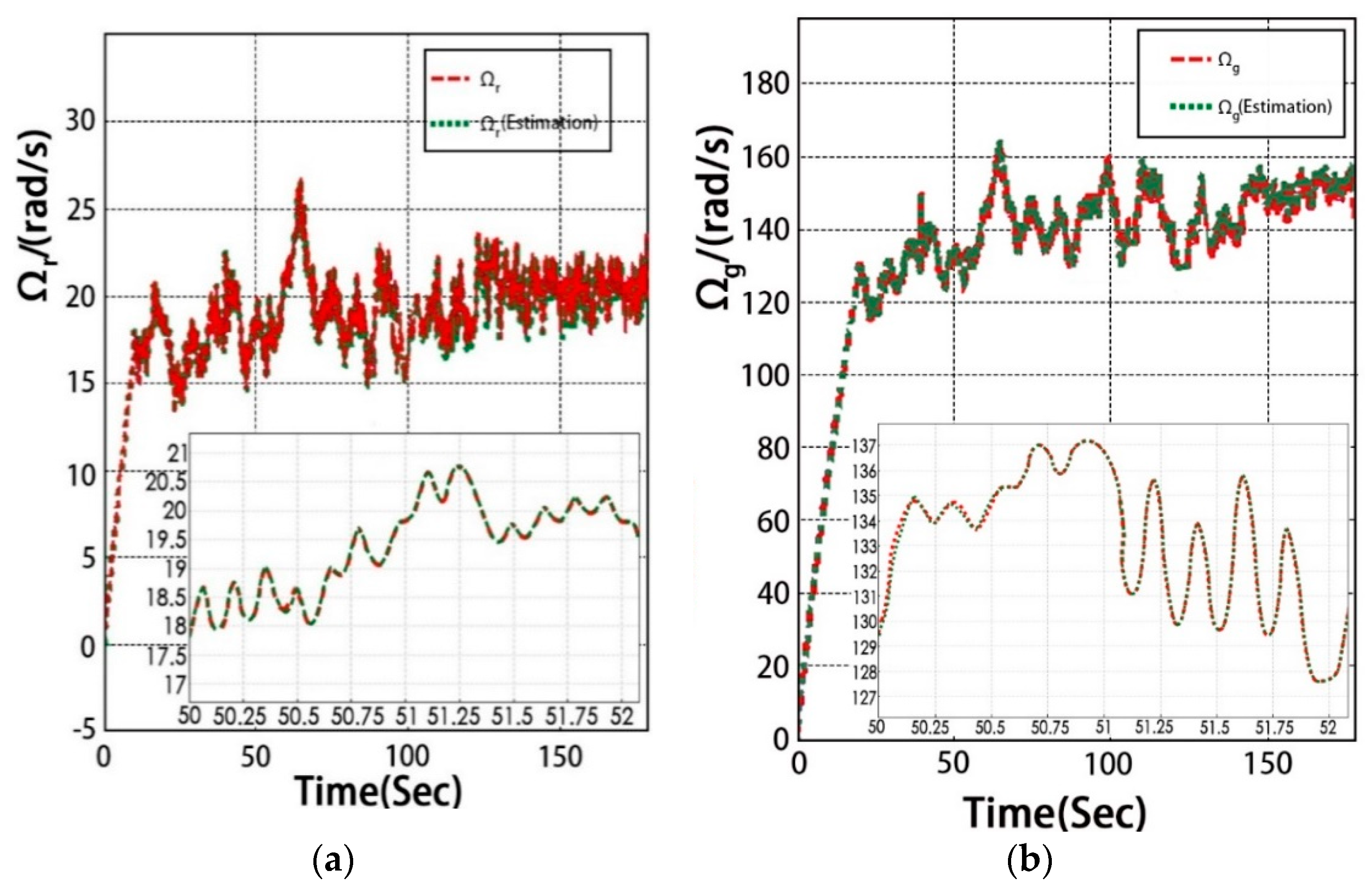
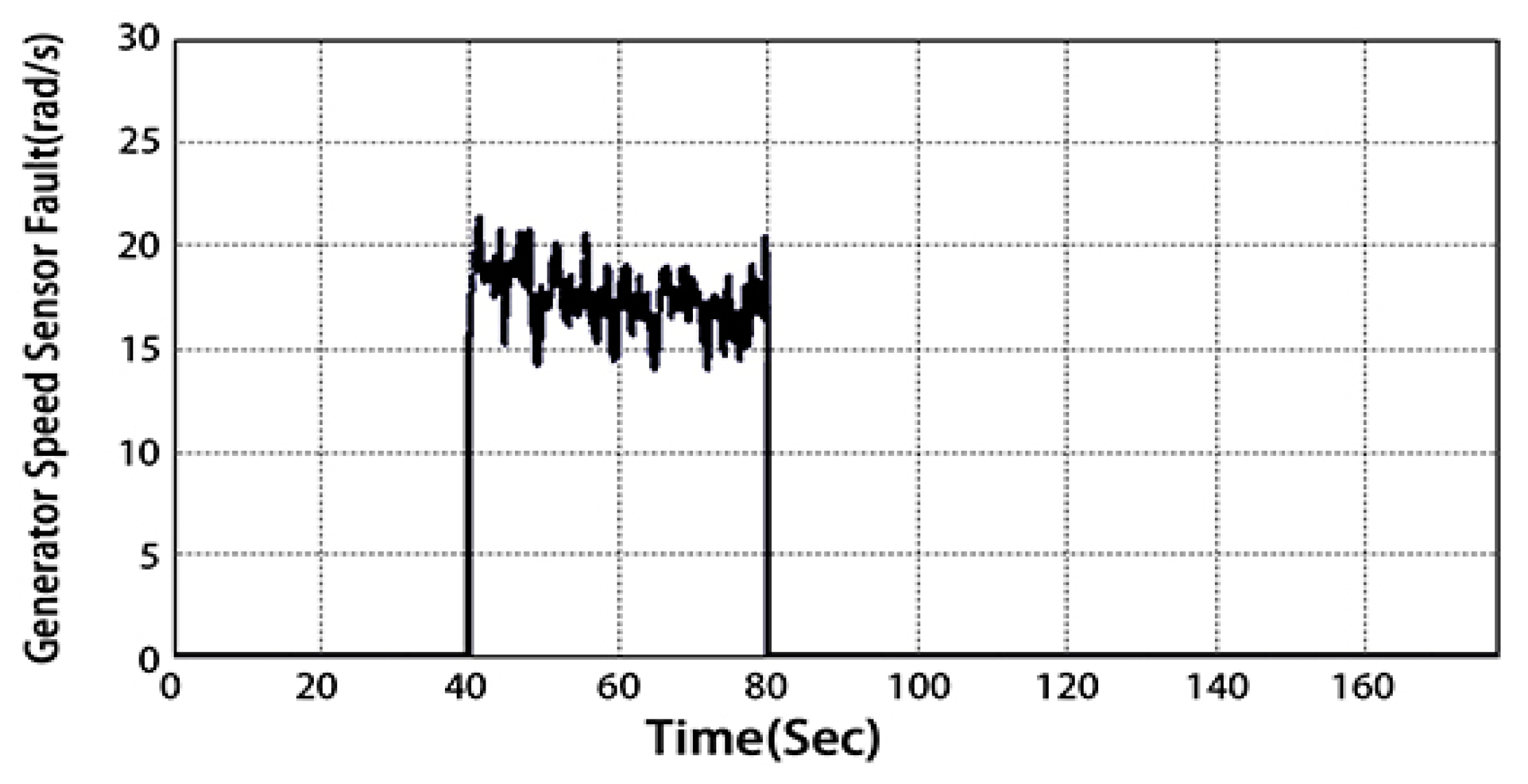
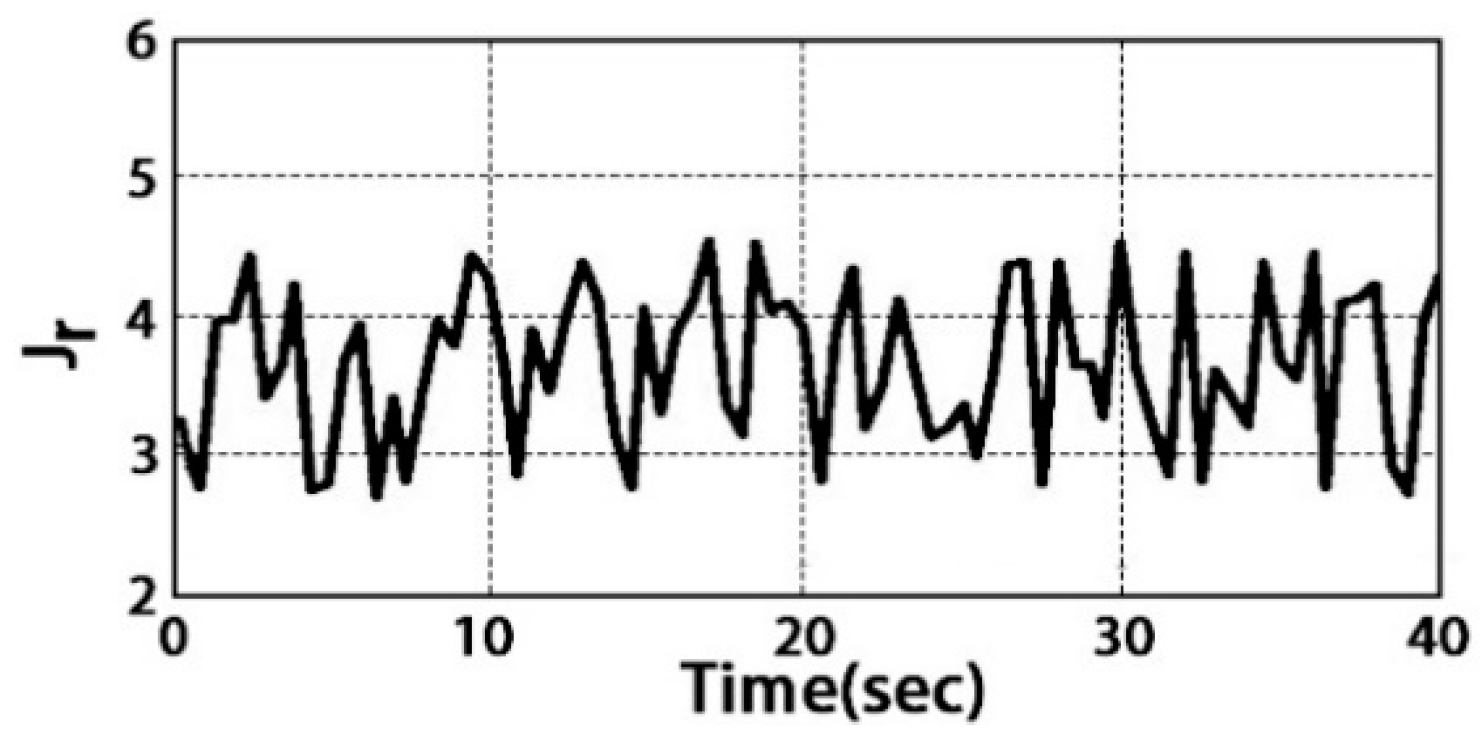
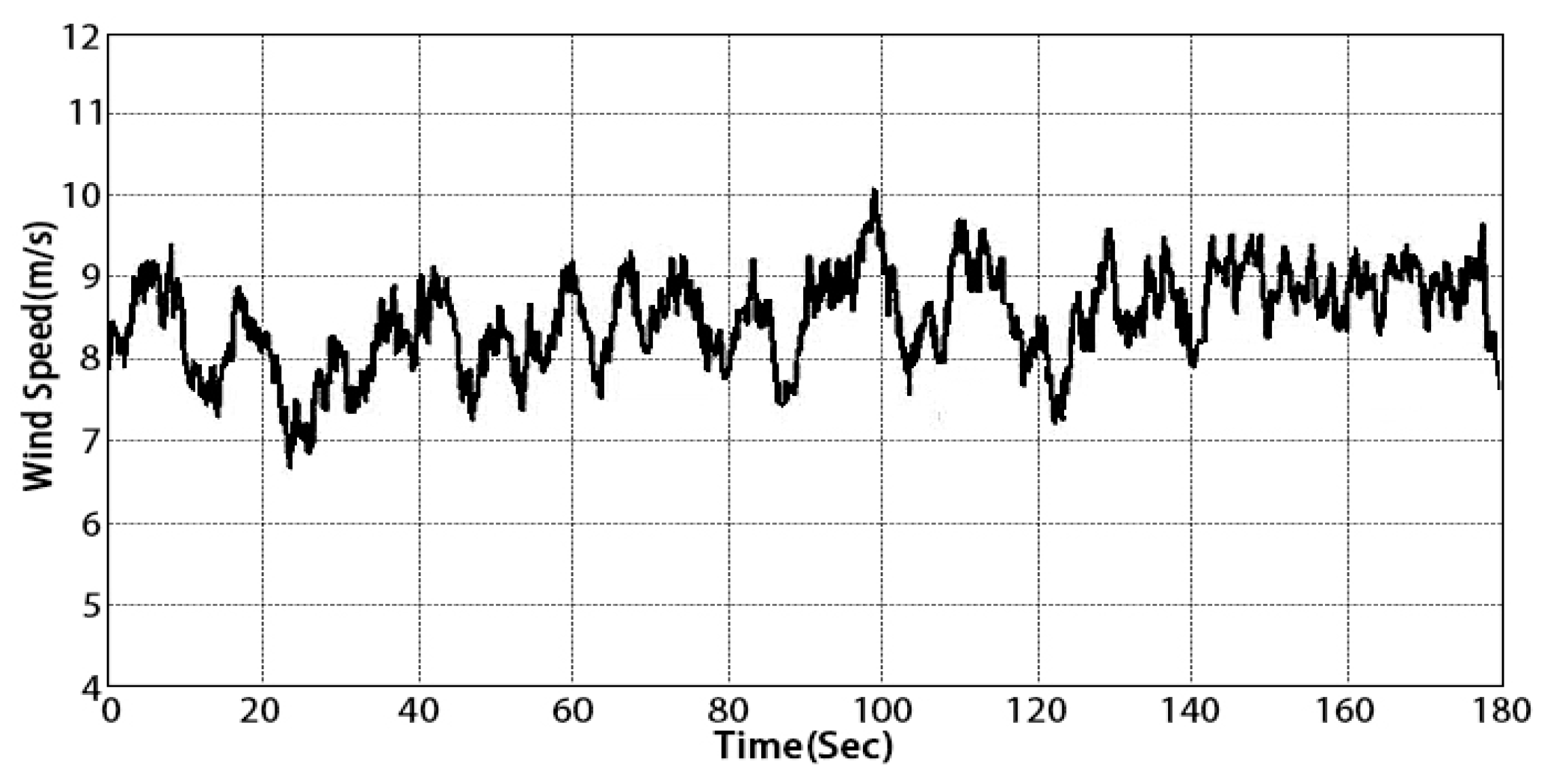
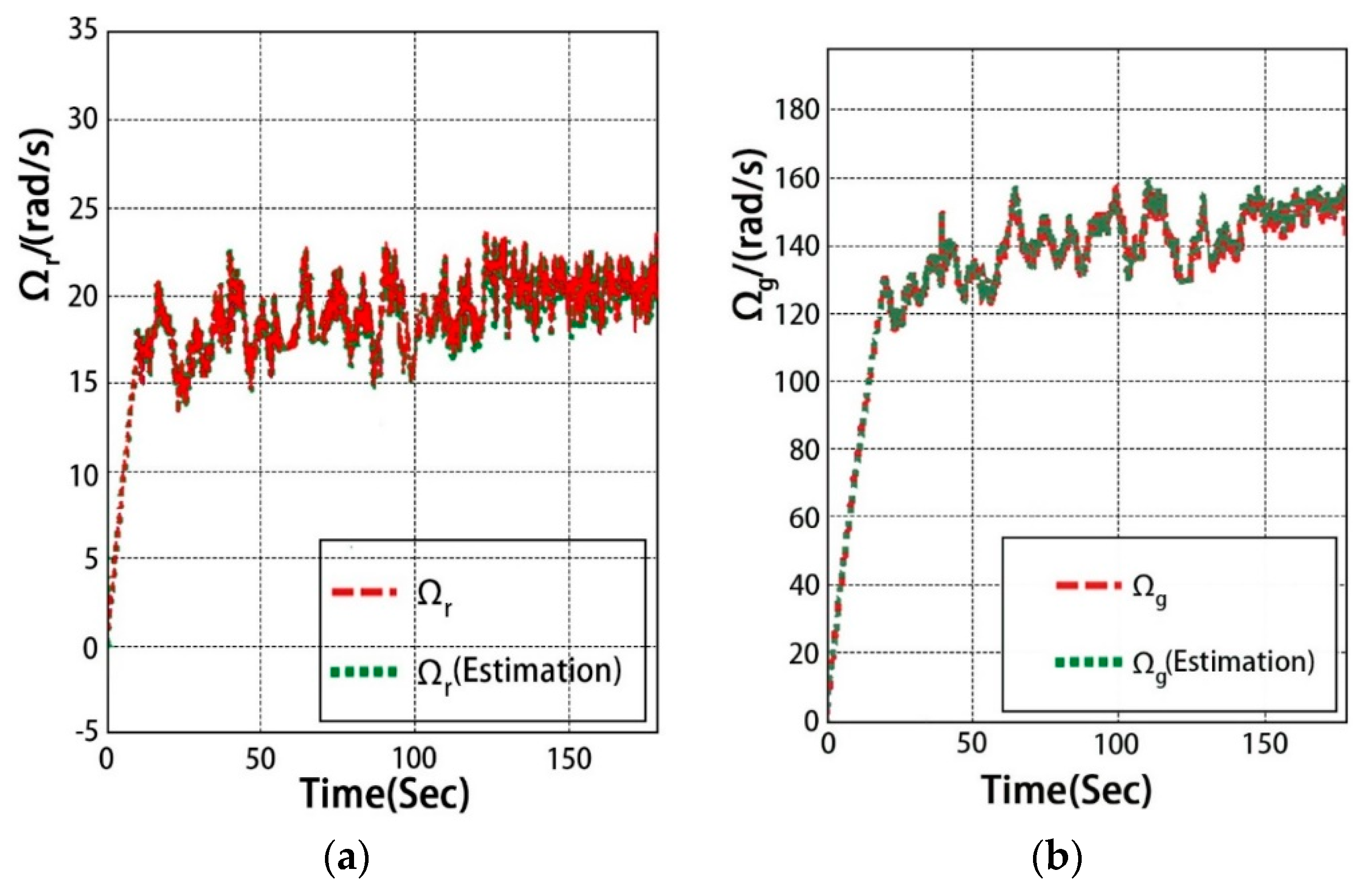
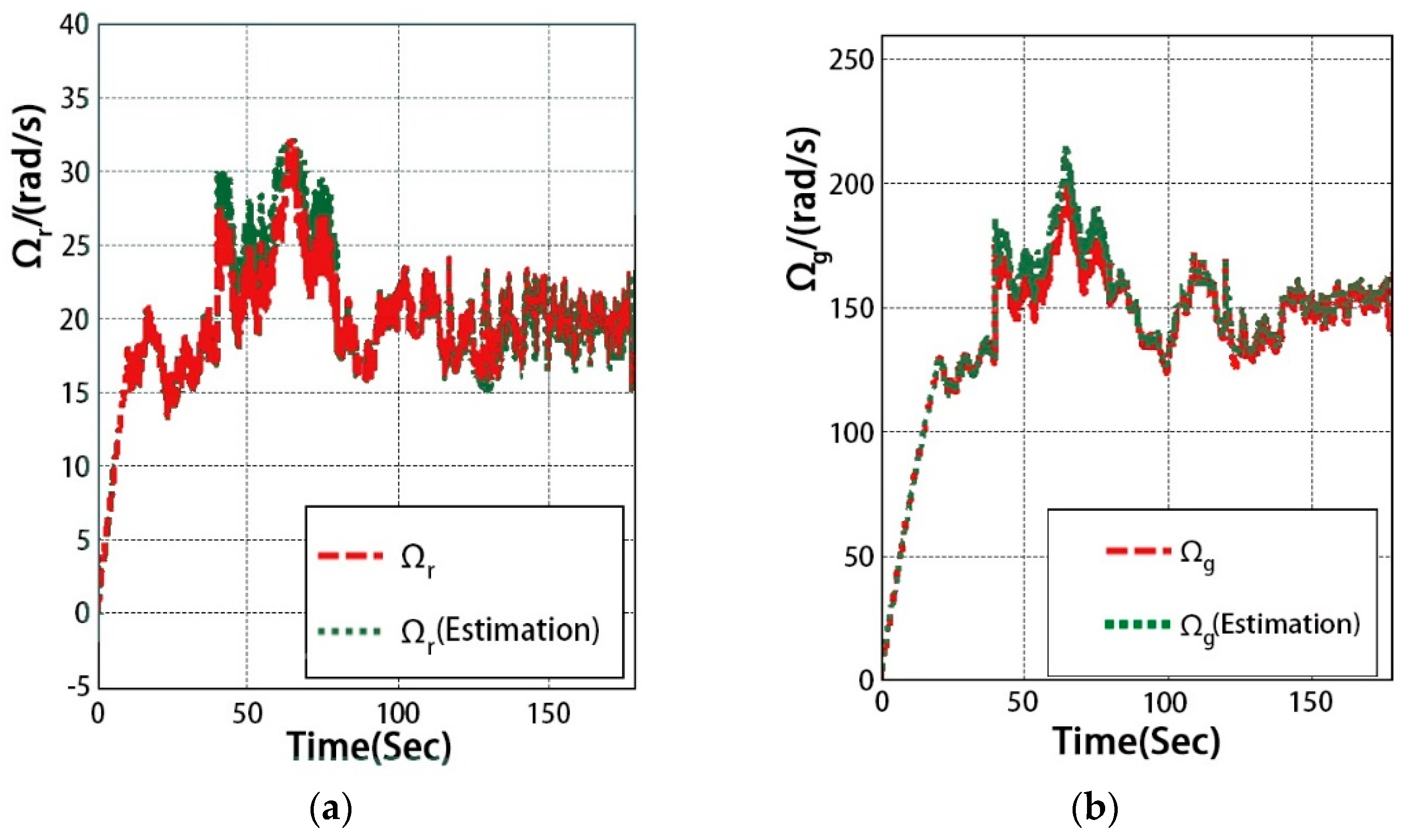
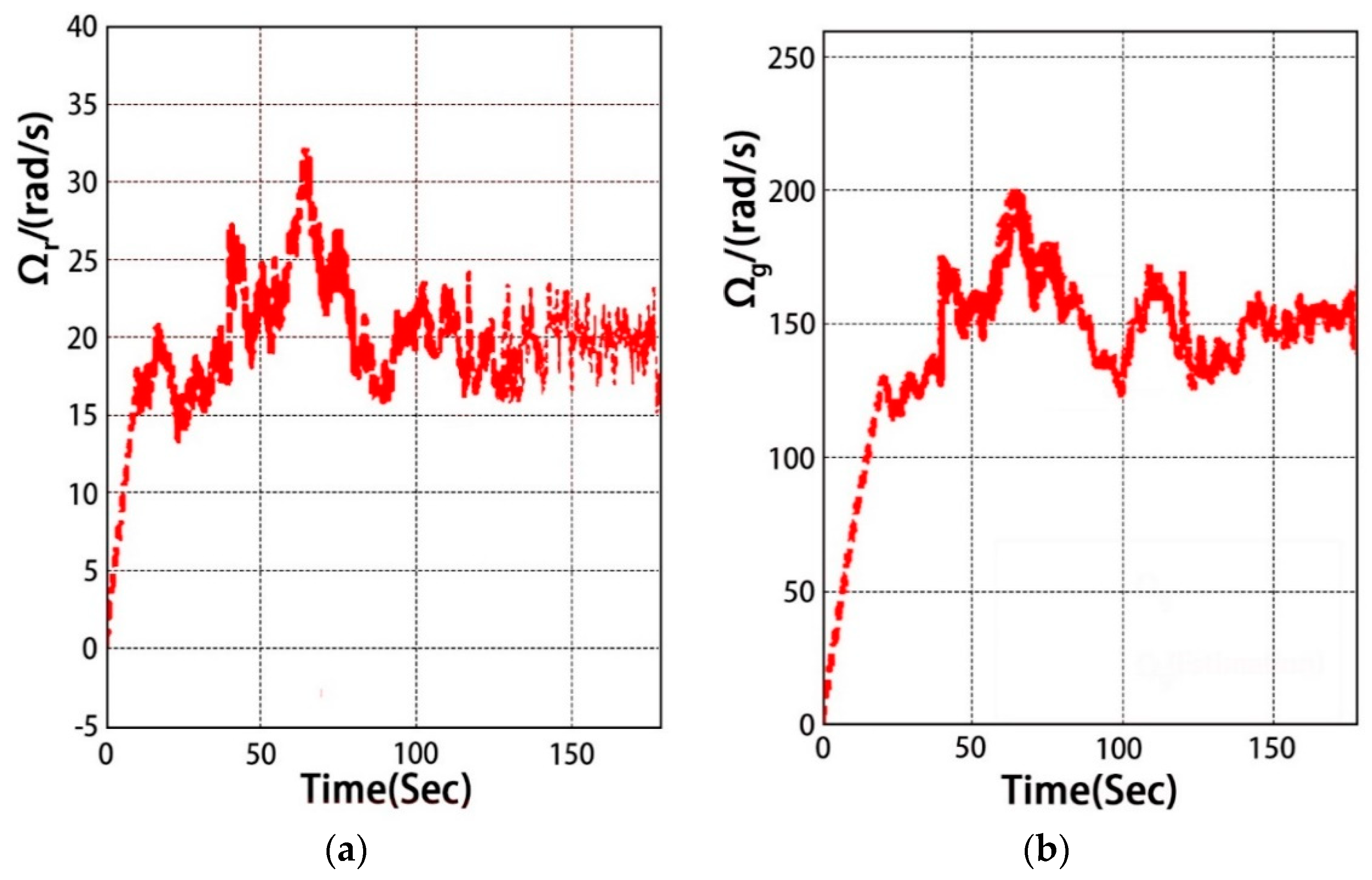
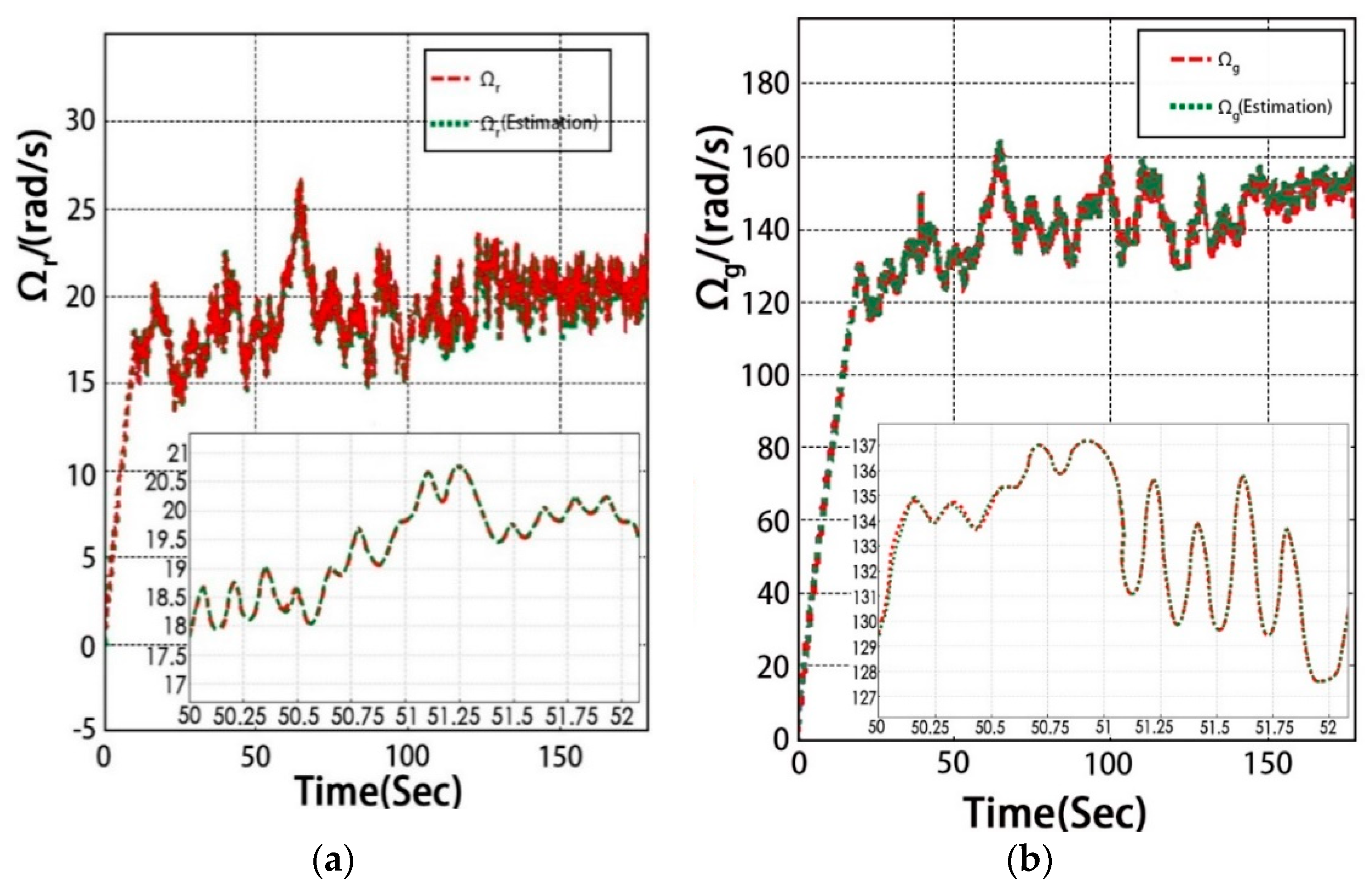
6. Simulation Results and Analysis
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, J.; Li, J.; Yao, X. The Economic Effects of the Development of the Renewable Energy Industry in China. Energies 2019, 12, 1808. [Google Scholar] [CrossRef]
- Pursiheimo, E.; Holttinen, H.; Koljonen, T. Inter-sectoral effects of high renewable energy share in global energy system. Renew. Energy 2019, 136, 1119–1129. [Google Scholar] [CrossRef]
- Gielen, D.; Boshell, F.; Deger, S.; Bazilian, M.D.; Wagner, N.; Gorini, R. The role of renewable energy in the global energy transformation. Energy Strategy Rev. 2019, 24, 38–50. [Google Scholar] [CrossRef]
- Vargas, S.A.; Esteves, G.R.T.; Maçaira, P.M.; Bastos, B.Q.; Oliveira, F.L.C.; Souza, R.C. Wind power generation: A review and a research agenda. J. Clean. Prod. 2019, 218, 850–870. [Google Scholar] [CrossRef]
- Lv, D.G.; D, Z.Y.; Li, S. Fault-tolerant of brushless permanent magnet motor drives with Hall sensors. Electr. Mach. Control 2019, 23, 44–52. [Google Scholar]
- Li, L.; He, K.; Wang, X.Y.; Liu, Y.H. Sensor fault-tolerant control for gear-shifting engaging process of automated manual transmission. Mech. Syst. Signal Proc. 2018, 99, 790–804. [Google Scholar] [CrossRef]
- Wang, Y.; Hua, R. A combined Time-Delay Prediction Model for Fault Diagnosis of UAV Sensors. Electron. Opt. Control 2019, 26, 86–89. [Google Scholar]
- Ying, L.M.; Hang, C.C.; Shu, N.Q.; Wang, D.H. Permanent magnet synchronous motor fault-diagnosis and fault-tolerant. Electr. Mach. Control 2019, 63, 1–8. [Google Scholar]
- Nasrolahi, S.S.; Abdollahi, F. Sensor fault detection and recovery in satellite attitude control. Acta Astronaut. 2018, 145, 275–283. [Google Scholar] [CrossRef]
- Xiahou, K.S.; Wu, Q.H. Fault-tolerant control of doubly-fed induction generators under voltage and current sensor faults. Int. J. Electr. Power Energy Syst. 2018, 98, 48–61. [Google Scholar] [CrossRef]
- Shen, Y.X.; Yang, X.F.; Zhao, Z.P. Sensor fault diagnosis for wind turbine generation system. Control Theory Appl. 2017, 34, 321–328. [Google Scholar]
- Zhai, D.; Lu, A.Y.; Dong, J.; Zhang, Q.L. Event triggered H−/H∞ fault detection and isolation for T-S fuzzy systems with local nonlinear models. Signal Process. 2017, 138, 244–255. [Google Scholar] [CrossRef]
- Kwon, O.M.; Park, M.J.; Ju, H.P.; Lee, S.M. Stability and stabilization of T-S fuzzy systems with time-varying delays via augmented Lyapunov-Krasovskii functionals. Inf. Sci. 2016, 372, 1–15. [Google Scholar] [CrossRef]
- Zhu, F.L.; Jiang, P.; Li, X.H. Design of Observer and Dynamic Output Feedback Fault Tolerant Controller Based on T-S Fuzzy Model. J. Xi’an Jiaotong Univ. 2016, 50, 91–96. [Google Scholar]
- Zhang, X.Z.; Wang, Y.N. Robust Fuzzy Control for Doubly Fed Wind Power Systems with Variable Speed Based on Variable Structure Control Technique. Math. Probl. Eng. 2014, 2014, 750101. [Google Scholar] [CrossRef]
- Kamal, E.; Oueidat, M.; Aitouche, A.; Ghorbani, R. Robust Scheduler Fuzzy Controller of DFIG Wind Energy Systems. IEEE Trans. Sustain. Energy 2013, 4, 706–715. [Google Scholar] [CrossRef]
- Chen, G.G.; Huang, S.W.; Liu, J.C.; Guo., F. Research on Fuzzy Variable Pitch Control System for Wind Turbines Based on Simulink. Res. Explor. Lab. 2016, 35, 90–94. [Google Scholar]
- Kamal, E.; Aitouche, A.; Ghorbani, R.; Bayart, M. Robust fuzzy fault-tolerant control of wind energy conversion systems subject to sensor faults. IEEE Trans. Sustain. Energy 2012, 3, 231–241. [Google Scholar] [CrossRef]
- Kamal, E.; Koutb, M.; Sobaih, A.A.; Abozalam, B. An intelligent maximum power extraction algorithm for hybrid wind-diesel-storage system. Int. J. Electr. Power Energy Syst. 2010, 32, 170–177. [Google Scholar] [CrossRef]
- Gálvez-Carrillo, M.; Kinnaert, M. Sensor fault detection and isolation in doubly fed induction generators accounting for parameter variations. Renew. Energy 2011, 36, 1447–1457. [Google Scholar] [CrossRef]
- Babypriya, B.; Anita, R. Modelling simulation and analysis of double fed induction generator for wind turbine. J. Electr. Eng. 2009, 60, 79–85. [Google Scholar]
- Chitti, B.B.; Mohanty, K.B. Doubly-fed induction generator for variable speed wind energy conversion systems e modeling & simulation. Int. J. Comput. Electr. Eng. 2010, 2, 141–147. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Names | Values |
|---|---|
| Rated power | |
| Rated voltage | |
| Rated speed | |
| Air density | |
| Blade length | |
| Transmission efficiency | |
| Pole pairs | |
| Rated electromagnetic torque | |
| Inertia of the generator | |
| Inertia of the rotor |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
You, G.; Xu, T.; Su, H.; Hou, X.; Wang, X.; Fang, C.; Li, J. Fault-Tolerant Control of Doubly-Fed Wind Turbine Generation Systems under Sensor Fault Conditions. Energies 2019, 12, 3239. https://doi.org/10.3390/en12173239
You G, Xu T, Su H, Hou X, Wang X, Fang C, Li J. Fault-Tolerant Control of Doubly-Fed Wind Turbine Generation Systems under Sensor Fault Conditions. Energies. 2019; 12(17):3239. https://doi.org/10.3390/en12173239
Chicago/Turabian StyleYou, Guodong, Tao Xu, Honglin Su, Xiaoxin Hou, Xue Wang, Chengxin Fang, and Jisheng Li. 2019. "Fault-Tolerant Control of Doubly-Fed Wind Turbine Generation Systems under Sensor Fault Conditions" Energies 12, no. 17: 3239. https://doi.org/10.3390/en12173239
APA StyleYou, G., Xu, T., Su, H., Hou, X., Wang, X., Fang, C., & Li, J. (2019). Fault-Tolerant Control of Doubly-Fed Wind Turbine Generation Systems under Sensor Fault Conditions. Energies, 12(17), 3239. https://doi.org/10.3390/en12173239