1. Introduction
Modern diesel engines are normally equipped with a variable-geometry turbocharger (VGT) or fixed geometry turbocharger (FGT) [
1,
2]. However, the FGT, and to a lesser extent VGT, suffer from an undesired response dynamic caused by the sluggish turbine power response, popularly known as turbo-lag. Turbo-lag is observed through the slow boost pressure (
) and torque responses, leading to undesired transient emissions spikes and fuel penalty. In addition, the poor transient boost response, together with smoke limited fueling, also leads to poor drivability performance [
3]. Moreover, part of the exhaust energy is also wasted, either through the exhaust bypass valve or widely opened VGT vane, to avoid over-boost at high engine load conditions. This results in the thermodynamic efficiency penalty for engines equipped with conventional turbochargers.
The electrically assisted turbocharger (EAT) is promising in enhancing boost response and recovering exhaust energy [
4,
5,
6,
7,
8,
9,
10,
11]. By mounting an electrical motor/generator (referred to as TEMG in this paper) in the shaft of conventional turbocharger, EAT is capable of bi-directional energy transfer. The EAT can assist the compressor via the motor mode for enhanced boost response at the early stage of tip-in, and recover the exhaust energy via the generator mode to avoid over-boost. The schematic of the diesel engine equipped with EAT is shown in
Figure 1. The benefits of EAT are summarized as below:
- (1)
Improved boost response allows enhanced engine torque response [
12,
13], and enables down-speeding and downsizing [
14,
15]. Improvements of fuel economy (FE) can also be achieved mainly by reduced pumping losses. In a drive cycle simulation by Zhao et al. [
16], a 6.44% fuel-saving was reported for a Hybrid electric vehicle equipped with EAT assisted diesel engine.
- (2)
Better utilization of exhaust enthalpy during regen mode via energy recuperation from turbocharger (TC) braking.
- (3)
Lower pre-turbine pressure (
) and thereby lower pumping loss can be achieved through reduced VGT throttling during assist mode. This improves the thermal efficiency of the engine [
17].
- (4)
Proper use of assist and regen modes allows the TC to operate in optimal efficiency region [
14].
- (5)
Improved regulation of intake oxygen concentration (
Xoim). Compared to the conventional variable geometry turbocharger-exhaust gas recirculation (VGT-EGR) system, EAT offers additional control degree of freedom and therefore brings a direct result of improved manipulations of
and
. This helps to improve EGR inert quality and reduce transient soot/Nitrogen Oxides (NOx) emissions [
18].
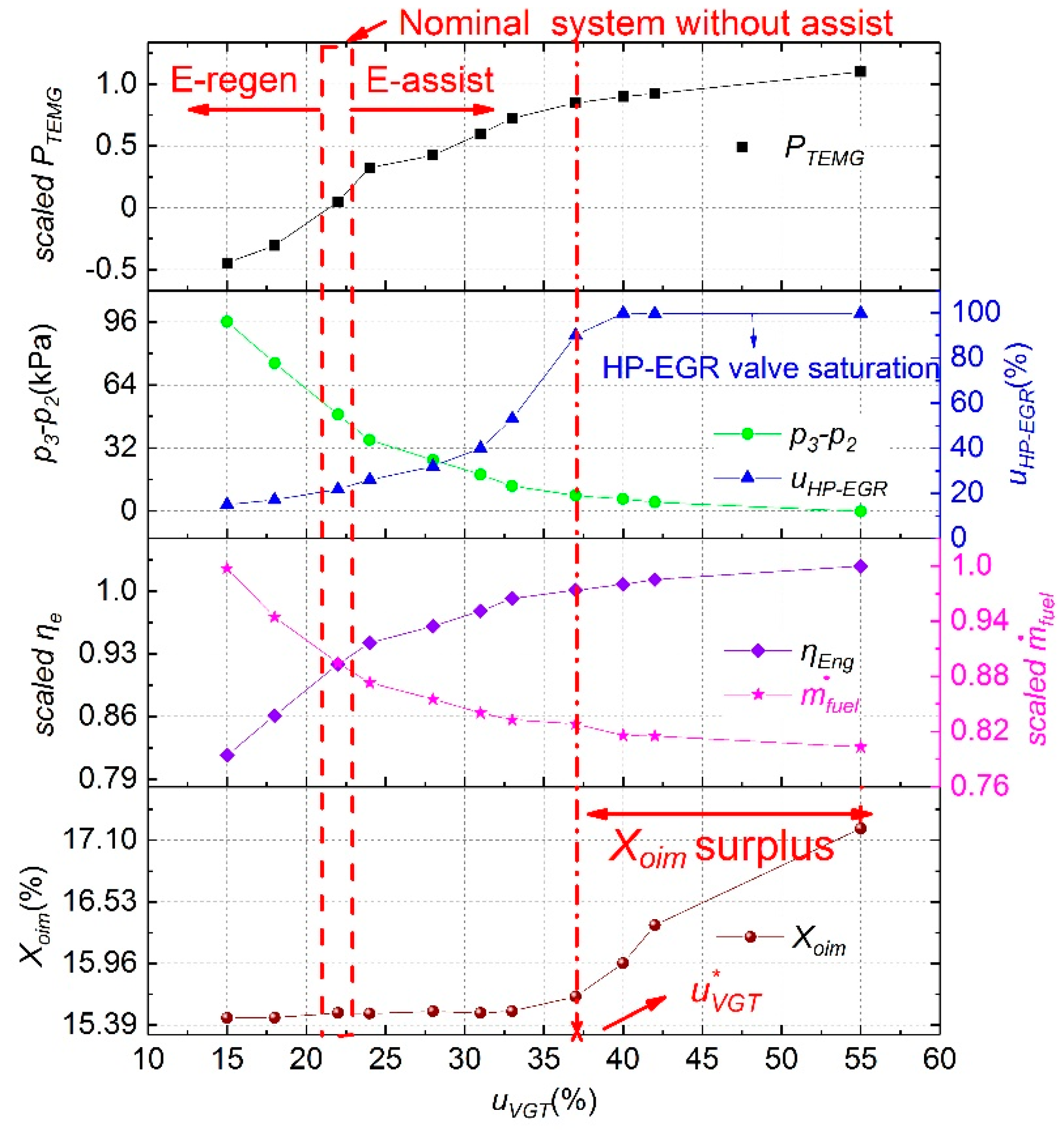
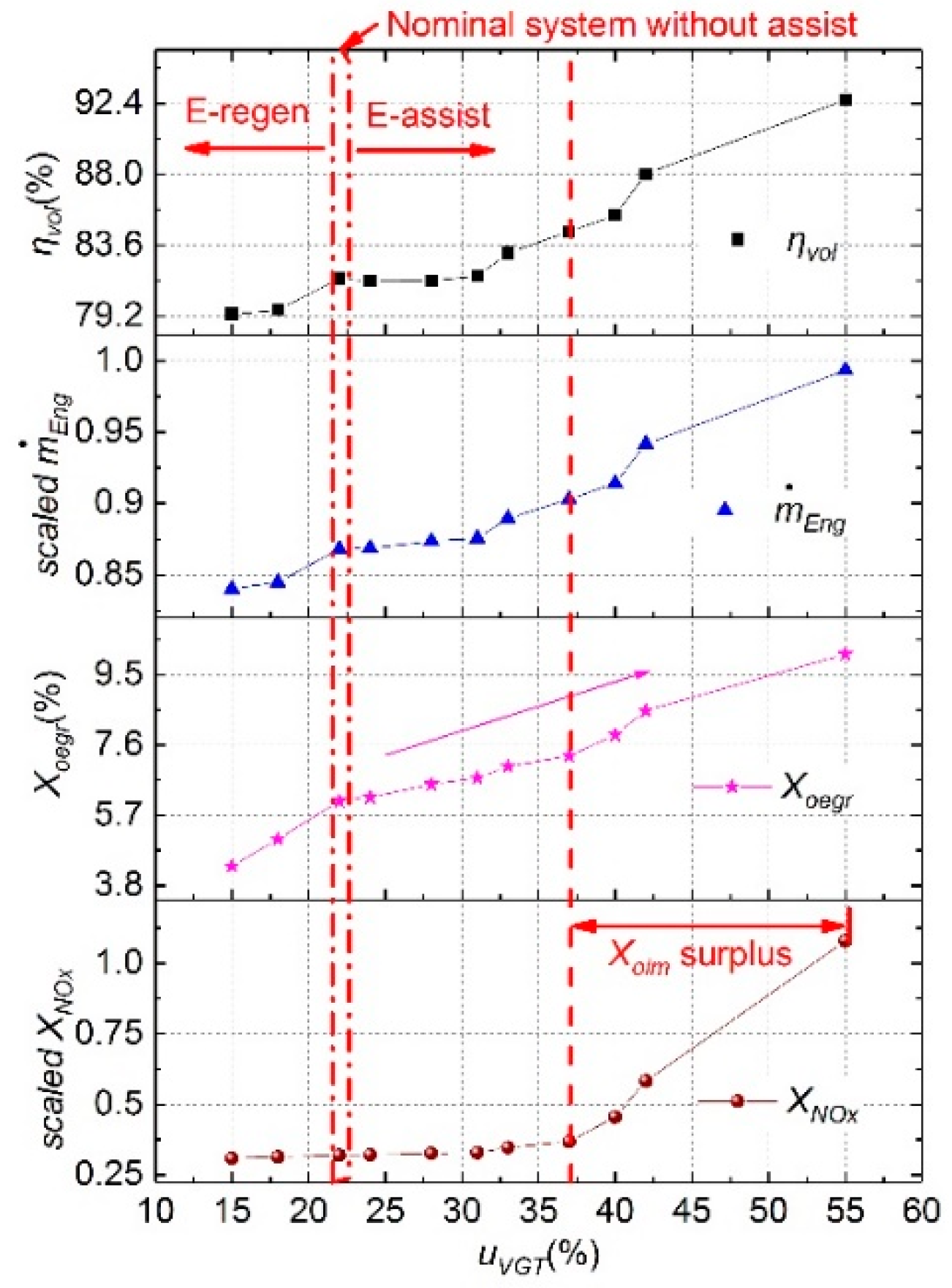
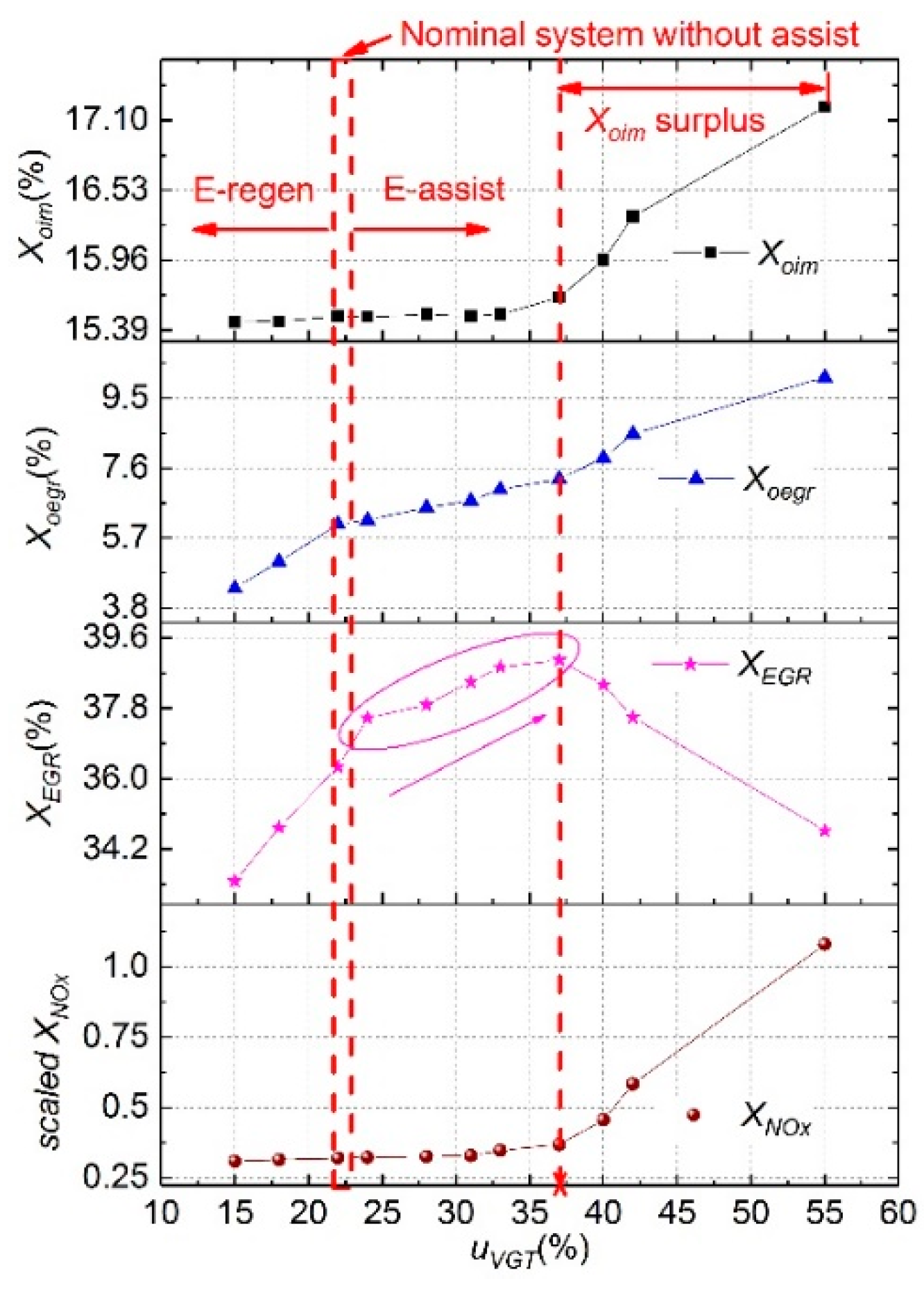
For a tip-in maneuver with the EAT system, a fast boost response can be achieved in assist mode without the need for an equivalent increase in exhaust turbine power. Therefore, a wider open VGT vane position can be held for optimal turbine efficiency, relative to the unassisted VGT-EGR air-path system (referred to as nominal system in this paper henceforth) [
19]. A wider open vane position leads to a decrease in the exhaust manifold pressure. The simultaneous decrease in
and increase in
reduce the (
) margin which impacts both FE and the ability to flow high pressure EGR (HP-EGR).
Using the intake oxygen concentration as feedback variable was attempted by Nakayama et al. [
20], Shutty et al. [
21], and Millo et al. [
22], for conventional VGT-EGR diesel engines. For engines equipped with EAT, however, fast boost response leads to increased fresh air flow relative to the nominal system, and wider open VGT vane position improves the engine volumetric efficiency for increased engine mass flow rate. Those two facts lead to increased dilution of the HP-EGR gas relative to the nominal system, which distinguished from conventional VGT-EGR engine. Therefore a higher HP-EGR flow rates may be of necessity to keep the intake oxygen concentration well matched with any hard constraints on engine out emissions. In other words, the EGR rate (
XEGR), as popularly used in the conventional VGT-EGR system, might not be an appropriate output for control for EAT [
3]. So far no experimental assessment results are reported on the selection of control output variables for EAT assisted engines, according to the authors’ best knowledge.
Regarding the control of
Xoim, the traditional proportional–integral–derivative (PID) algorithm is fairly straightforward to use and consequently is of great popularity. For instance, Park [
23] proposed a PID controller for
Xoim control in a 2.2 L turbocharged passenger car diesel engine, where the proportional gain was determined according to the current NOx level. In another approach, Chen et al. [
24] proposed an implicit PI-based
Xoim controller by tracking the air-fuel ratio in the tail pipe.
However, the PID controller suffers from the time-consuming parameter tuning and gain-scheduling [
25], and shows as poor robustness against operating condition variations and external disturbances. For EAT-assisted diesel engines, the transient response of the air system is much faster relative to the conventional VGT-EGR system. The frequent VGT vane position optimization also introduces a lot of disturbances to the
Xoim controller. Those facts drive the need for an advanced control solution for
Xoim with faster response and improved robustness against uncertainties.
In this paper, the benefits from using the
Xoim as control output is assessed experimentally on a heavy duty Diesel Engine test bench. Then, an active disturbance rejection control [
25,
26] based
Xoim controller (OADRC) is proposed, assisted by an existing
Xoim observer [
23]. The superiority of the proposed controller, against the conventional PID controller, is validated based on a previously calibrated high fidelity GT-SUITE simulation model [
27].
The rest of the paper is organized as follows. The system layout and the experiment setup as well as the simulation platform used in this study are discussed briefly in
Section 2. Experimental investigation on the fuel economy benefit and discussion on the selection of feedback variable for the HP-EGR system are provided in
Section 3. The impact of EAT on
Xoim control is analyzed in
Section 4. The
Xoim controller is developed and validated in
Section 5 and
Section 6 respectively. Finally, the conclusions are summarized in
Section 7.
4. Theoretical Analysis of the Impact of EAT on Xoim Control
From the aforementioned analysis, both steady-state and transient response confirmed the superiority of using Xoim as the control output for EAT assisted engines. However, interactions, between the electrical power of EAT and the states in the intake and exhaust manifolds, bring up complex disturbances to the Xoim control loop. This will be investigated based on the fundamentals of the boosting system in this section.
Based on the mass conservation of the intake manifold, the
Xoim dynamics can be modeled as [
27]:
where
is the compressor mass flow rate,
is the HP-EGR mass flow rate,
is the engine mass flow rate,
is the volume of intake manifold. At steady-state condition,
can be approximated by the sum of
and
. Detailed discussion about the unknown terms, namely
,
and
, are shown below. This purpose of the following analysis is to understand the impact of EAT assist on the
Xoim control from the perspective of physics.
1. The compressor mass flow rate
can be obtained from the definition of the compressor efficiency (
) in [
29], as shown in Equations (8) and (9).
where
is the specific heat capacity of air,
and
T1 are pre-compressor pressure and temperature, respectively,
is the isentropic power for compressing the air from
to
, i.e., power requirement during an isentropic process, and
is the actual power that the compression process consumes, which can be approximated by the steady-state energy balance relation:
where
is the turbine power,
is the mechanical loss of the EAT. Based on Equations (8)–(10), the compressor mass flow rate is modeled as function of
as below:
2. The HP-EGR flow rate
can be estimated by the model proposed in [
29] as:
where
is the HP-EGR valve position,
and
are the flow coefficient and cross-sectional area of the HP-EGR valve, respectively,
and
are exhaust manifold pressure and temperature respectively.
The
in Equation (12) can be obtained through the turbine efficiency definition and the Equation (10) as show in Equation (13) [
29]:
where
is the turbine efficiency,
is the turbine mass flow rate,
is the specific heat capacity of exhaust gases, and
is the post-turbine pressure. Specifically, the
model shown in Equation (14) as:
Substituting Equation (14) into Equation (12) transforms the HP-EGR flow model into:
It can be inferred that increased assist power (PTEMG) reduces the EGR flow rate through reduced pressure differential (or p3) across the EGR value, as shown in Equation (14).
3. The
can be approximated as the engine outlet port oxygen concentration (
), which is estimated based on [
27]:
where
is the air-to-fuel ratio,
and
can be estimated by Equations (3) and (5) respectively. By substituting Equations (3), (5), and (14) into Equation (16), the
can be modeled as a function of
as:
Finally, substituting Equations (11), (15), and (17) into Equation (7), the
model is derived as below:
It should be noted that the turbine and compressor efficiency are implicitly used in Equation (18), both of which vary with the operating point. For simplicity, they are read in turbine and compressor maps respectively, which are extrapolated from manufacturer’s data.
By observing Equation (18), it is clear that the EAT assisting power affects the dynamic primarily from three different aspects:
Enhanced air response through the term , since PTMEG increased the compressor power.
HP-EGR flow deficit when the pressure differential across the HP-EGR valve is insufficient as illustrated by , as PTEMG affects the upstream pressure of the EGR valve.
EGR gas dilution due to increased engine mass flow rate from elevated volumetric efficiency as indicated by , since PTEMG leads to increased fresh air flow and reduces the fuel consumption.
Clearly, in order to attenuate the disturbances caused by the additional control degree of freedom (
), an advanced disturbance rejection solution becomes necessary, as will be discussed in
Section 5.
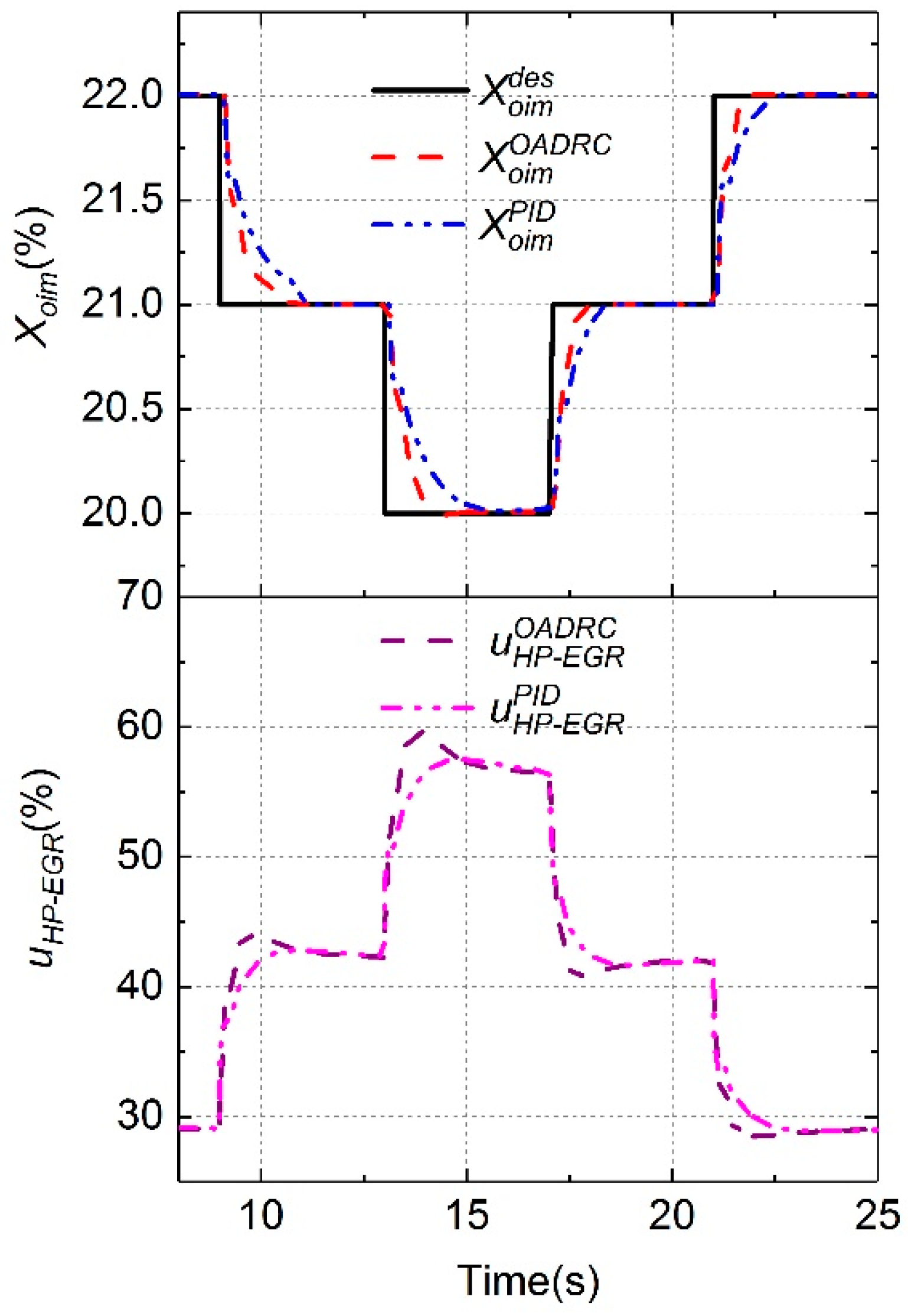
5. Xoim Controller Development
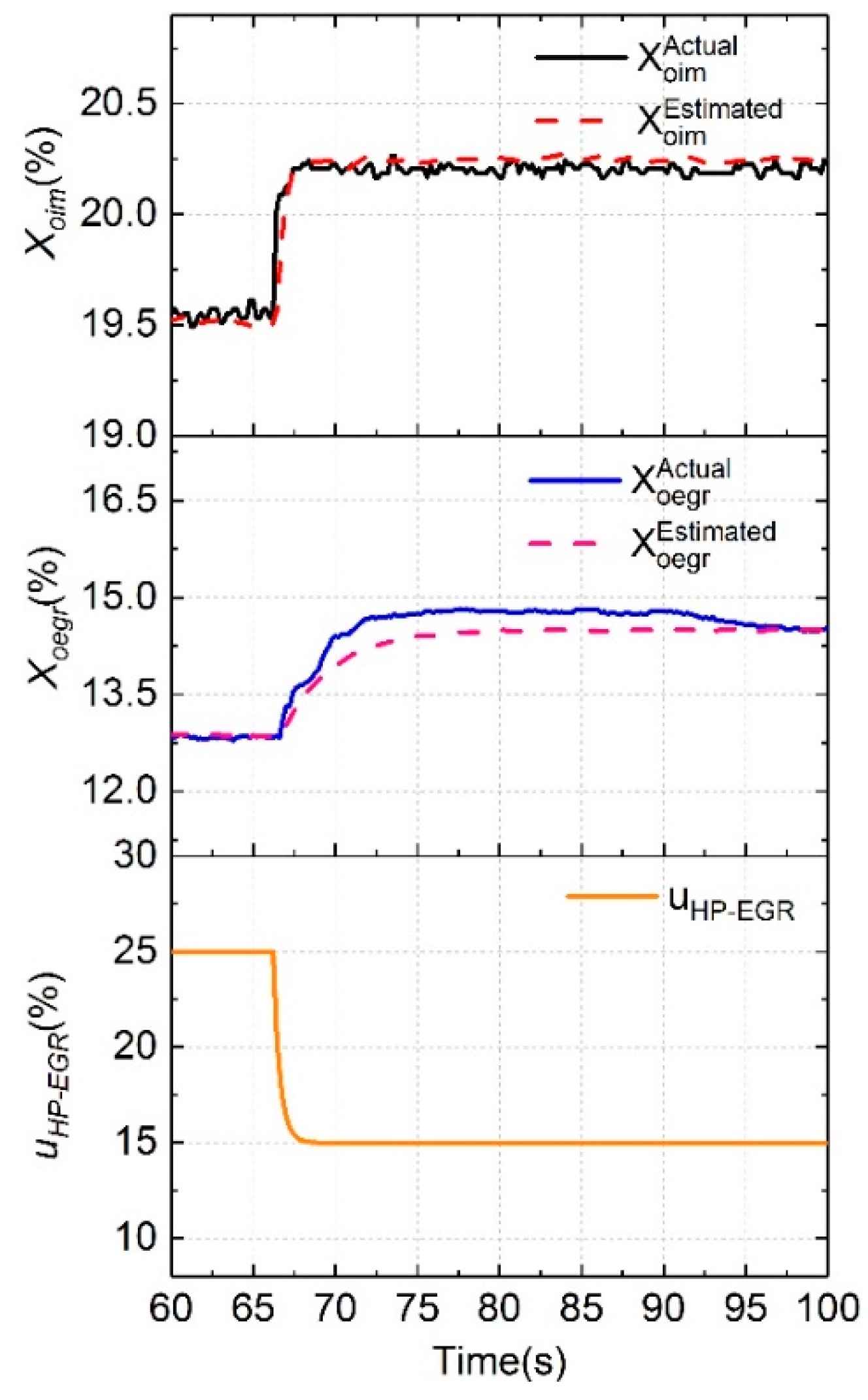
Since the universal oxygen sensor is mounted only on the exhaust side (UEGO), a
Xoim observer is necessary. In this paper, the
Xoim observer based on the measured
,
Xoegr, and estimated
, proposed by Park in [
23], is used. A brief introduction and experimental validation are provided in the
Appendix A for completeness. Then, an active disturbance rejection controller of oxygen concentration in intake manifold (OADRC) was developed with the control structure shown in
Figure 12.
For OADRC controller derivation, Equation (18) is rewritten into Equation (19):
where
is the control input gain, and
is denoted as the “total disturbance”. It is clear that estimation errors in engine flow rate and HP-EGR flow rate as well as the external disturbance are all lumped as total disturbance.
Equation (19) is then rewritten in the state space form for ESO derivation, as shown in Equation (20):
where
,
,
,
, i.e.,
,
are the states,
is the output,
is the input (
), namely the HP-EGR valve position.
Based on Equation (20), a linear first order extended state observer (ESO) is designed as in Equation (21), following the method shown in [
31],
where
is the tunable observer gain matrix,
, and
are the observed states and output (measurement) estimate, respectively.
The tuning of
matrix is addressed using the bandwidth parameterized method proposed by Gao [
31]. This is briefly introduced here for completeness. The characteristic polynomial for the ESO system, Equation (21), is
. Since
and
are design variables, these can be chosen to make the ESO state space Hurwitz stable. If we recognize that the characteristic polynomial may be expressed as a damped second order system, that is:
with
and
being the damping coefficient and the natural frequency (bandwidth) of the ESO system respectively, the ESO observer gains,
and
are then easily determined by choosing a system bandwidth and damping as follows:
Both and can be time varying and a dynamic selection for is allowed. For simplicity, the damping ratio is fixed at 1 in this paper. Hence, the eigenvalues for in Equation (21) are determined by the system bandwidth . After convergence of ESO, , , and then observed value of disturbance will approach the actual disturbance , which realizes the observation of the total disturbance of the system.
With the state observer properly designed, the plant is reduced to an integrator
which is easily controlled by a
P (proportional) controller
where
is the set-point for the desired intake oxygen concentration,
is the observed value of oxygen concentration in intake manifold,
is the proportional gain, which is selected to place the pole of the closed-loop system at the controller bandwidth
.
Finally, the control input, namely the HP-EGR valve position can be obtained as:
So far, the active disturbance rejection controller of oxygen concentration in intake manifold of the diesel engine equipped with EAT has been designed and the validation will be discussed in the next section.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















