Performance Improvements of Induction Motor Drive Supplied by Hybrid Wind and Storage Generation System Based on Mine Blast Algorithm

Abstract
1. Introduction
2. System Design
- (a)
- A buck DC–DC converter, an uncontrolled rectifier which can call a generator side converter.
- (b)
- A three-phase PWM inverter, which can call a load side DC–AC converter.
3. Basic Equations and Mathematical Formulation
3.1. Wind Turbine Power Generation Unit
3.2. PMSG Dynamical Model
3.3. Model of Uncontrolled Rectifier
3.4. DC–DC Converter
3.5. Energy Storage System
3.6. Induction Machine Model
4. Vector Control and DC–AC Converter
- The created torque and flux ought to be acquired, and after that, the relating reference stator currents in the d- and q-axis and are obtained.
- The precise location θ is then acquired, and it is utilized to change among contemporary and constant reference casings to accomplish the coveted stator current in d- and q-axis parts.
- At that point, the obtained d- and q-axis parts of the stator current in the constant reference outline are changed over to the desired three-phase currents, which are utilized for DC–AC inverter control.
5. Optimal Mine Blast Algorithm (MBA)
5.1. Objective Function
5.2. The Proposed MBA
6. Simulation Results
- (a)
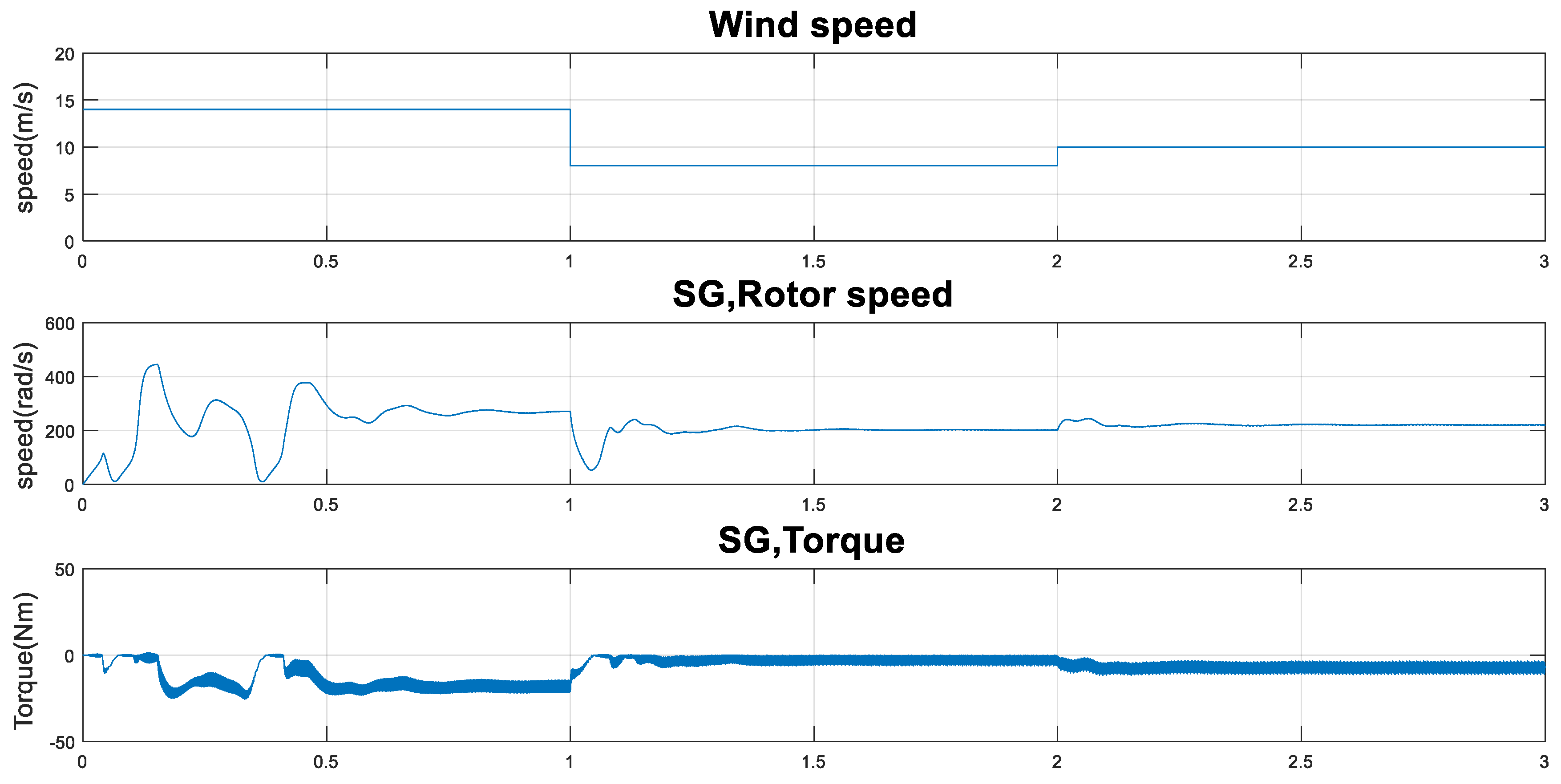
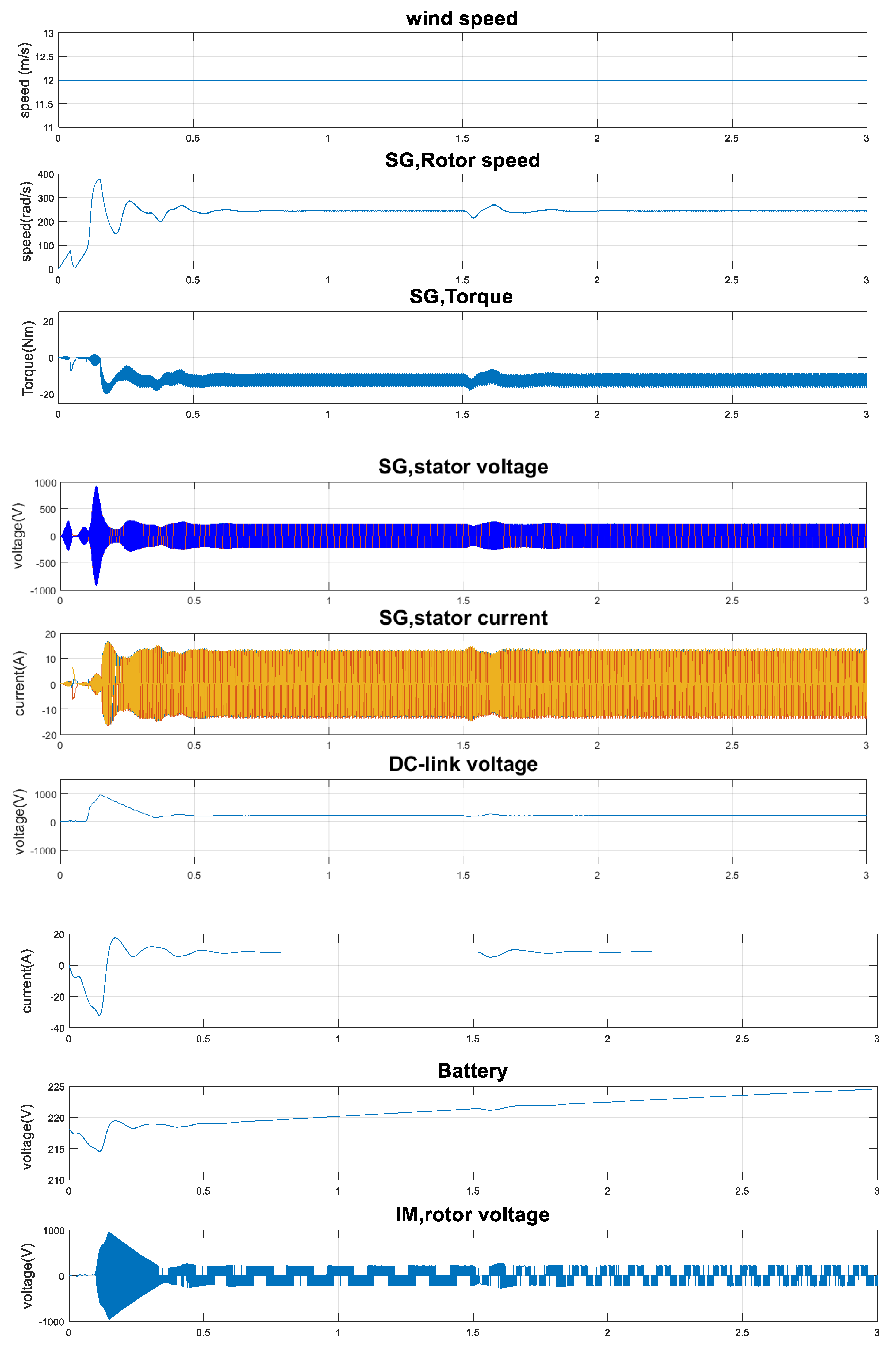
- If Vdc tends to get larger because of the increase in the velocity of the wind:The controller enters operation and differs from the operating cycle ratio of the load adapter to preserve Vdc at its reference value.Simultaneously, the controller of the battery works to raise the charging current of the battery to keep any extra produced power and to maintain Vdc at their required value.Accordingly, terminal voltage of the generator tends to be minimized and stabilized to the suitable value.The field-oriented control adjusts the IM stator voltage in order for the IM velocity of the rotor to respond to the reference estimate.If the DC-link voltage gets larger as a result of the increase in the velocity of the wind, the controllers will carry out an action that is opposite to those described above, as is clear from Figure 5.
- (b)
- If the reference velocity of IM increases, the velocity of IM will get larger to be in line with the reference estimate when the motor stator frequency increases.
- (c)
- Similarly, if the IM reference load torque increases, the IM actual load torque will increase to a suitable level for the reference value.
7. Conclusions
- -
- The proposed hybrid generation wind/storage energy framework is qualified for feeding the dynamic loads taken into consideration.
- -
- The battery storage energy unit operates just to compensate the decrease in generated wind power and/or offer additional required energy using the load.
- -
- In addition, the considered controller is qualified for preserving load voltage at its reference estimate for dynamic loads with different parameters and/or variations in wind velocity.
- -
- The vector regulator of the induction motor is effective for following the velocity of the rotor speed in its desired value and load torque with 8% maximum overshoot, zero settling time and zero steady state error.
- -
- The system with the proposed optimal control has better performance than the case of applying conventional PID control.
- -
- As a future work, one could include the MPPT of wind power. In that case, all controllers would be changed, and more investigation and comparisons would be made.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| A | swept area |
| λ | tip speed ratio |
| ρ | air density |
| β | blade pitch angle |
| R | WT rotor radius |
| power coefficient | |
| wind turbine output power | |
| wind turbine output torque | |
| wind speed | |
| the mechanical angular rotor speed of the wind turbine | |
| L | stator inductance of PMSG |
| angular rotor speed of the PMSG | |
| , | d-q stator voltages of PMSG |
| , | d-q stator currents of PMSG |
| flux linkage the PMSG | |
| pole pairs of the PMSG | |
| electromagnetic torque of the PMSG | |
| stator resistance of the PMSG | |
| battery output voltage | |
| rectifier output current | |
| rectifier output voltage | |
| D | duty cycle ratio |
| rms phase current of the PMSG | |
| rms phase voltage of the PMSG terminal | |
| f | friction coefficient of the IM |
| , | stator and rotor resistances of the IM |
| , | stator and rotor main inductances of the IM |
| rotor leakage flux of the IM | |
| intrinsic self-inductance of the IM | |
| , | d- and q-axis of rotor leakage flux of the IM |
| , | d- and q-axis of stator currents of the IM |
| rotor electrical speed of the IM | |
| mechanical rotor speed of the IM | |
| electromagnetic torque | |
| r | stator resistance |
| differential operator | |
| , | lower and upper bounds of the problem |
| a primary first shot point | |
| Ns | number of population |
| n | repetition number |
| exploration factor | |
| vector contains the shrapnel distance for exploded mines | |
| angle of shrapnel pieces | |
| the best solution location | |
| F | the value of fitness function at the position x. |
| reduction factor | |
| ITAE | integral time absolute error |
| IAE | integral absolute error |
| ISE | integral square error. |
| ITSE | integral time square error. |
| time of simulation | |
| X | Independent variable to be evaluated |
| Vector od dependent (control) variables | |
| Ki(max), Ki(min) | maximum and minimum limits of control parameters |
References
- Kassem, A.M.; Abdelaziz, A.Y. Reactive power control for voltage stability of standalone hybrid wind–diesel power system based on functional model predictive control. IET Renew. Power Gener. 2014, 8, 887–899. [Google Scholar] [CrossRef]
- Mendis, N.; Muttaqi, K.M.; Perera, S. Management of battery-supercapacitor hybrid energy storage and synchronous condenser for isolated operation of PMSG based variable-speed wind turbine generating systems. IEEE Trans. Smart Grid 2004, 5, 944–953. [Google Scholar] [CrossRef]
- Mendis, N.; Muttaqi, K.M.; Sayeef, S.; Perera, S. Standalone Operation of Wind Turbine-Based Variable Speed Generators with Maximum Power Extraction Capability. IEEE Trans. Energy Convers. 2012, 27, 822–834. [Google Scholar] [CrossRef]
- Zhu, Y.; Tomsovic, K. Development of models for analyzing the load-following performance of microturbines and fuel cells. Electr. Power Syst. Res. 2002, 62, 1–11. [Google Scholar] [CrossRef]
- Delfino, B.; Fornari, F. Modeling and control of an integrated fuel cell/wind turbine system. In Proceedings of the IEEE PowerTech Conference, Bologna, Italy, 23–26 June 2003. [Google Scholar]
- De Battista, H.; Mantz, H.J.; Garelli, F. Power conditioning for a wind/hydrogen energy system. J. Power Sources 2006, 155, 478–486. [Google Scholar] [CrossRef]
- Barbir, F. PEM electrolysis for production of hydrogen from renewable energy sources. J. Sol. Energy 2005, 78, 661–669. [Google Scholar] [CrossRef]
- Gorgun, H. Dynamic modeling of a proton exchange membrane (PEM) electrolyzer. Int. J. Hydrogen Energy 2006, 31, 29–38. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Zhang, X. An efficient wind–photovoltaic hybrid generation system using doubly excited permanent-magnet brushless machine. IEEE Trans. Ind. Electron. 2010, 57, 831–839. [Google Scholar]
- Harwood, R.C.; Manoranjan, V.S.; Edwards, D.B. Lead–acid battery model under discharge with a fast splitting method. IEEE Trans. Energy Convers. 2011, 26, 1109–1117. [Google Scholar] [CrossRef]
- Świerczyński, M.; Teodorescu, R.; Rasmussen, C.N.; Rodriguez, P.; Vikelgaard, H. Overview of the energy storage systems for wind power integration enhancement. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010. [Google Scholar]
- Barote, L.; Marinescu, C. Storage analysis for stand-alone wind energy applications. In Proceedings of the 2010 12th International Conference on Optimization of Electrical and Electronic Equipment, Basov, Romania, 20–22 May 2010. [Google Scholar]
- Yang, L.S.; Liang, T.J. Analysis and implementation of a novel bidirectional DC–DC converter. IEEE Trans. Ind. Electron. 2012, 59, 422–434. [Google Scholar] [CrossRef]
- Chourasia1, A.; Srivastava, V.; Choudhary, A.; Praliy, S. Comparison study of vector control of induction motor using rotor flux estimation by two different methods. Int. J. Electron. Electr. Eng. 2014, 7, 201–206. [Google Scholar]
- Barote, L.; Marinescu, C.; Cirstea, M.N. Control structure for single-phase stand-alone wind-based energy sources. IEEE Trans. Ind. Electron. 2013, 60, 764–772. [Google Scholar] [CrossRef]
- Kassem, A.M. Neural control design for isolated wind generation system based on SVC and nonlinear autoregressive moving average approach. WSEAS Trans. Syst. 2012, 11, 39–49. [Google Scholar]
- Kassem, A.M.; Zaid, S.A. Optimal control of a hybrid renewable wind/fuel cell energy in micro grid application. In Proceedings of the 2017 Nineteenth International Middle East Power Systems Conference, Cairo, Egypt, 19–21 December 2017. [Google Scholar]
- Kassem, A.M. Modeling and robust control design of a stand-alone wind-based energy storage generation unit powering an induction motor variable-displacement pressure compensated pump. IET Renew. Power Gener. 2016, 10, 275–286. [Google Scholar] [CrossRef]
- Kassem, A.M. Fuzzy-logic based self-tuning PI controller for high-performance vector controlled induction motor fed by PV-generator. WSEAS Trans. Syst. 2013, 12, 22–31. [Google Scholar]
- Singh, G.; Kaur, P. Mine Blast Algorithm. Int. J. Res. Appl. Sci. Eng. Technol. 2018, 6, 519–525. [Google Scholar] [CrossRef]
- Sadollah, A.; Aahreininejada, A.; Eskandar, H.; Hamdi, M. Mine blast algorithm: A new population based algorithm for solving constrained engineering optimization problems. Appl. Soft Comput. 2013, 13, 2592–2612. [Google Scholar] [CrossRef]
- Erramia, Y.; Ouassaid, M.; Maaroufia, M. Control of a PMSG based wind energy generation system for power maximization and grid fault conditions. Energy Procedia 2013, 42, 220–229. [Google Scholar] [CrossRef]
- Bellarbi, S.; Koussa, D.S.; Djoudi, A. Sliding mode control for PMSG-based wind power system. J. Phys. Conf. Ser. 2018, 1081, 012012. [Google Scholar] [CrossRef]
- Lee, S.W.; Chun, K.H. Adaptive sliding mode control for PMSG wind turbine systems. Energies 2019, 12, 595. [Google Scholar] [CrossRef]
- Koumba, P.M.; Cheriti, A.; Doumbia, M.L.; Bouzid, A.M. Wind turbine control based on a permanent magnet synchronous generator connected to an isolated electrical network. In Proceedings of the 2017 IEEE Electrical Power and Energy Conference, Saskatoon, SK, Canada, 22–25 October 2017. [Google Scholar]
- Gam, O.; Abdelati, R.; Tankari, M.A.; Mimouni, M.F.; Lefebvre, G. Robust control strategies on the optimization of a wind turbine pumping system. Int. J. Renew. Energy Res. 2018, 8, 1641–1647. [Google Scholar]
- Verde, A.; Lastres, O.; Hernández, G.; Ibañez, G.; Verea, L.; Sebastian, P.J. A new method for characterization of small capacity wind turbines with permanent magnet synchronous generator: An experimental study. Heliyon 2018, 4, e00732. [Google Scholar] [CrossRef] [PubMed]
- Fateh, L.; Ahmed, O.; Amar, O.; Abdelhak, D.; Lakhdar, B. Modeling and control of a permanent magnet synchronous generator dedicated to standalone wind energy conversion system. Front. Energy 2016, 10, 155–163. [Google Scholar] [CrossRef]
- Ali, E.S. Speed Control of Induction Motor Supplied by Wind Turbine Using ICA. WSEAS Trans. Power Syst. 2016, 11, 261–270. [Google Scholar]
- Menghal, P.M.; Laxmi, A.J.; Anusha, D. Speed Control of Induction Motor using Fuzzy Logic Controller. i-Manag. J. Electr. Eng. 2014, 8, 21. [Google Scholar] [CrossRef]
- Fandi, G.; Ahmad, I.; Igbinovia, F.O.; Muller, Z.; Tlusty, J.; Krepl, V. Voltage regulation and power loss minimization in radial distribution systems via reactive power injection and distributed generation unit placement. Energies 2018, 11, 1399. [Google Scholar] [CrossRef]
- Rashid, M. Power Electronics Handbook, 2nd ed.; Elsevier Press: Amsterdam, The Netherlands, 2011. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| A | 524.8 |
| Ns | 120 |
| Number of variables | 6 |
| Max iteration | 100 |
| Final distance | 0.0548 |
| Number of function evaluations | 20,000 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdalla, S.A.; Abdullah, S.S. Performance Improvements of Induction Motor Drive Supplied by Hybrid Wind and Storage Generation System Based on Mine Blast Algorithm. Energies 2019, 12, 2947. https://doi.org/10.3390/en12152947
Abdalla SA, Abdullah SS. Performance Improvements of Induction Motor Drive Supplied by Hybrid Wind and Storage Generation System Based on Mine Blast Algorithm. Energies. 2019; 12(15):2947. https://doi.org/10.3390/en12152947
Chicago/Turabian StyleAbdalla, Shiref A., and Shahrum S. Abdullah. 2019. "Performance Improvements of Induction Motor Drive Supplied by Hybrid Wind and Storage Generation System Based on Mine Blast Algorithm" Energies 12, no. 15: 2947. https://doi.org/10.3390/en12152947
APA StyleAbdalla, S. A., & Abdullah, S. S. (2019). Performance Improvements of Induction Motor Drive Supplied by Hybrid Wind and Storage Generation System Based on Mine Blast Algorithm. Energies, 12(15), 2947. https://doi.org/10.3390/en12152947