Impact of Information and Communication Technology Limitations on Microgrid Operation



Abstract
1. Introduction
- the aging of the centralized energy infrastructure, which can be more vulnerable with the increasing power demand;
- the governmental carbon pollution standards around the world to reduce carbon dioxide (CO2) emissions along with federal and state regulatory actions to reduce greenhouse gas (GHG) emissions from new and existing power plants. This encouraged the implementation of more renewable energy sources (RESs) into the electric grid [1,2], especially, since 29% of the U.S. GHG emissions are only produced from electricity generation [3]. However, RESs are intermittent by nature imposing a challenge on load forecasting and maintaining generation/demand balance; and,
- the rise in the frequency and magnitude of major events, as well as the increasing salience of threats, such as cyber and physical attacks against the grid, make it necessary to not only think about the reliability, but also about the resilience of the grid and its ability to withstand and recover from major events, and be a flexible platform for higher levels of integration of RES.
- Section 2 presents a literature review about smart grids and microgrids and their conceived capabilities, followed by a literature survey and the research gaps regarding MG’s types and control techniques. Finally, introduces a review of the conducted research and the research opportunities regarding the impact of ICT on MGs control and performance.
- Section 2 also discusses the communication architecture and its functional requirements (e.g., allowable delays, bandwidth ranges) for smart grids and MGs applications. Moreover, it references the available software that could be utilized to simulate communication networks, and it discusses the sources of delays in these networks.
- Section 3 introduces a DC MG model that will be used as a case study to show the impact of communication delays on MG performance.
- Section 4 shows the control layer of the aforementioned DC MG.
- Section 5 demonstrates the impact of one of the ICT’s degradation, which is the delay, on the performance of the DC MG case study.
- Finally, Section 6 introduces the conclusion of this paper.
2. Literature Survey
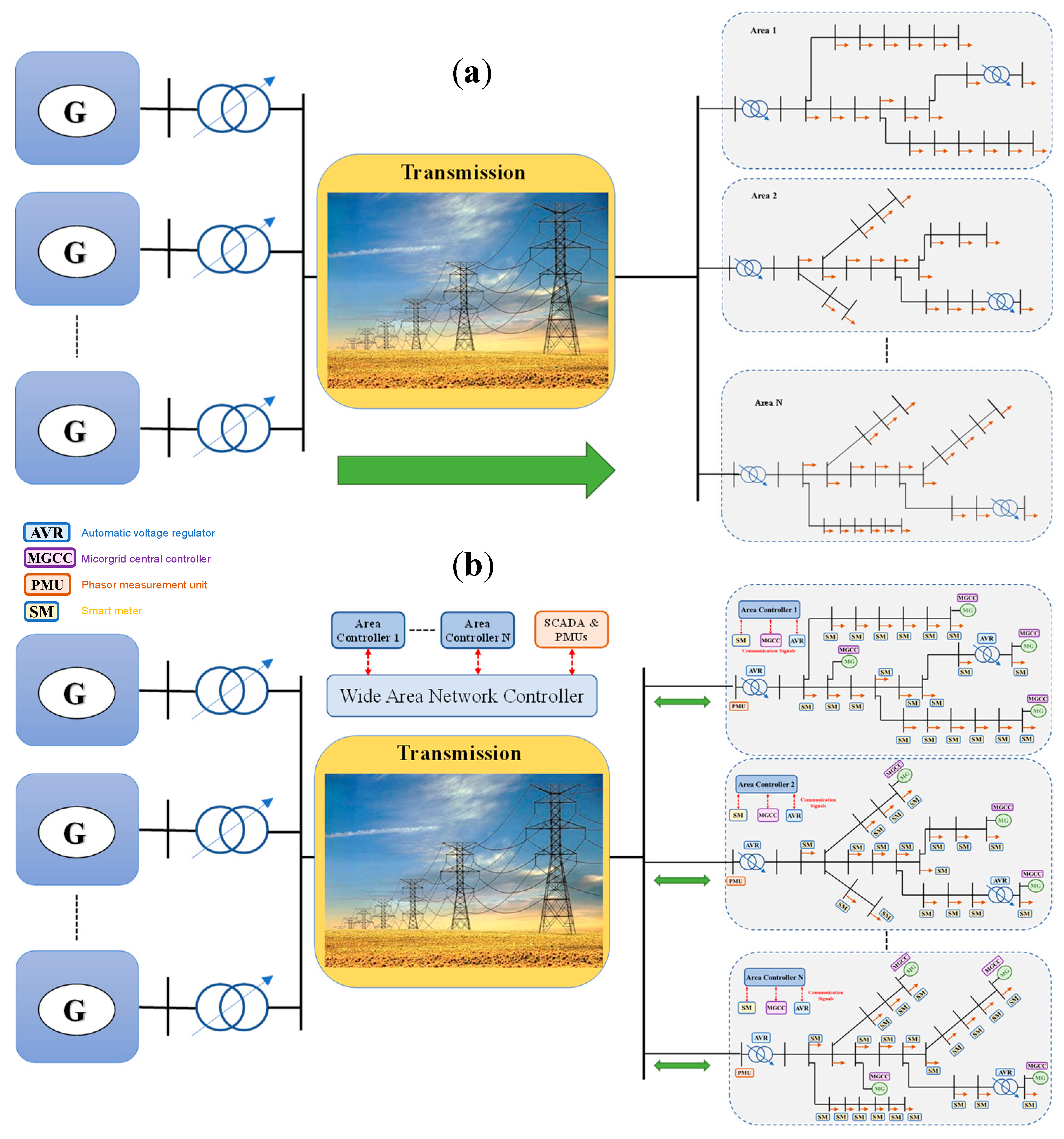
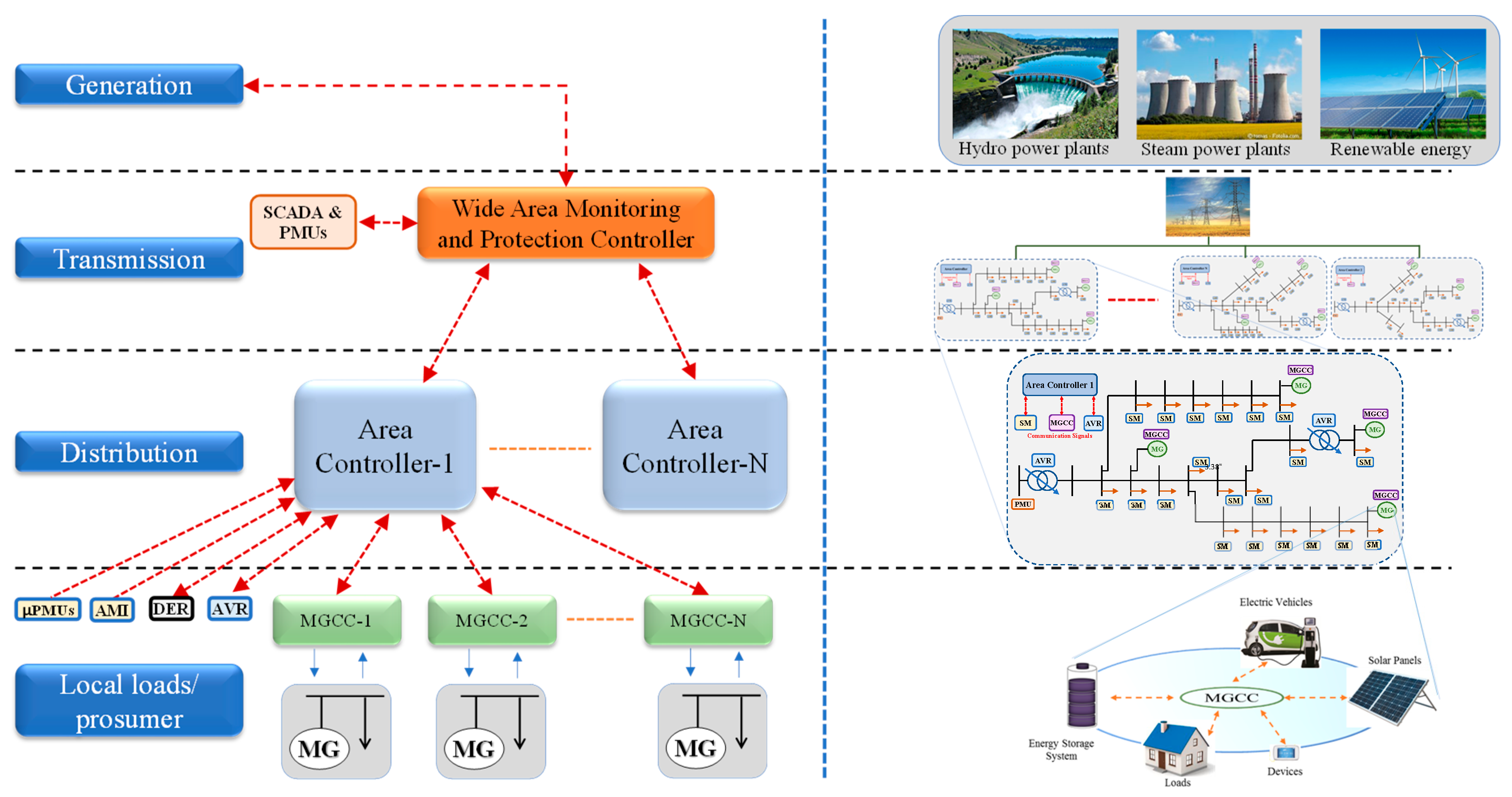
2.1. Smart Grid Vision
- enabling massive deployment and efficient usage of MGs and distributed energy resources (DERs) with integration abilities to communication-based control platforms. This mandate expanding existing standards and data models to accommodate new technologies; such efforts are seen in new revisions of the IEC 61850 standard;
- improving resilience against disruption providing stable and continuous electricity supplies, thus averting wide area accidental blackouts. In other words, smart grid shall guarantee the secure and normal operation of the grid even during emergency issues (e.g., extreme weather, natural disasters, and intentional breakage), enhances sustainability and provides self-healing capabilities;
- securing the information transmitted all over the grid; facilitating the interaction of consumers with energy management systems (EMS) to support load shaping (e.g., peak shaving) and demand-response functionalities;
- allowing for scalable real-time monitoring of grid operations and status. This effort can be seen in the deployment of advanced metering infrastructures (AMIs) and monitoring systems (e.g., phasor measurement units (PMUs));
- implementing an optimized configuration of resources and reducing grid losses; and,
2.2. Microgirds
- at the customer level, MGs can exploit time-of-use pricing to lower consumer costs through energy arbitrage, or provide needed energy/capacity to the grid;
- at the distribution level, MGs can participate in demand side management and demand response programs to help the utilities shave their peak demand, while also offering economic benefits to MGs owners. Besides, MGs can relieve congestion on transmission lines (TLs) by satisfying a portion of the loads locally, eliminating some of the high fees that utilities would normally be charged by their respective ISO/RTOs when using congested TLs (i.e., heavily loaded); and,
- at the transmission level, if large-scale or aggregated MGs can provide frequency regulation, and potentially help defer investments in generation and transmission infrastructures. MGs can also provide spin/non-spin reserve by using their backup generator (e.g., diesel engines) or installed energy storage system (ESS) (e.g., battery). Voltage support and black-start can also be provided by MGs.
2.3. Microgrid Types and Control Techniques
2.3.1. Centralized Communication-Based Control (CCC)
2.3.2. Distributed Communication-Based Control (DCC)
2.3.3. Voltage Droop Control (VDC)
2.3.4. Hybrid Control Techniques
2.3.5. Future Recommendations
2.4. Impact of ICT Degradation on Microgrids Control and Performance
2.4.1. Impact of ICT Degradation on Distributed Communication-Based Controlled MGs
2.4.2. Impact of ICT Degradation on Hybrid Controlled MGs
2.4.3. Impact of ICT Degradation on Centralized Controlled MGs
2.4.4. Future Recommendations
- conducting detailed analysis regarding the impact of ICT degradation on microgrid communities’ operations and resilience;
- defining clear communication-based control architectures and minimum requirements for various MGs’ types and applications;
- studying the impact of latency on the event of synchronizing a single MG with the electric grid or within a MG community;
- suggesting and analyzing non-hardware solutions to mitigate the severe impacts of latency on MGs. Since the impact of delay varies with the operational conditions, which are unpredictable factors and function of time. Therefore, more adaptive techniques have to be developed. (e.g., utilizing AI tools, such as machine learning to sense and mitigate communication delays);
- conducting a risk assessment of ICT degradation’s impact on the physical structure (i.e., hardware) of different types of MGs (i.e., DC, AC, hybrid);
- investigating the impact of ICT degradation on Fault Diagnosis and Prognosis processes (FDP). As the name implies FDP performs two tasks, fault diagnosis and fault prognosis. How would the delay impact the FDP processes and consequently the health of the MGs;
- examining how the ICT delay impact-severity varies statistically with the scalability of a single MG and MG communities;
- analyzing how MG community dispatch-capabilities’ delay might impact the utility peak demand in demand response programs;
- evaluating the impact of delaying the control signals to the dispatchable resources such as batteries within renewable based MGs during renewable resources intermittency events.
2.5. Communication Network Requirements in MGs and Smart Grids
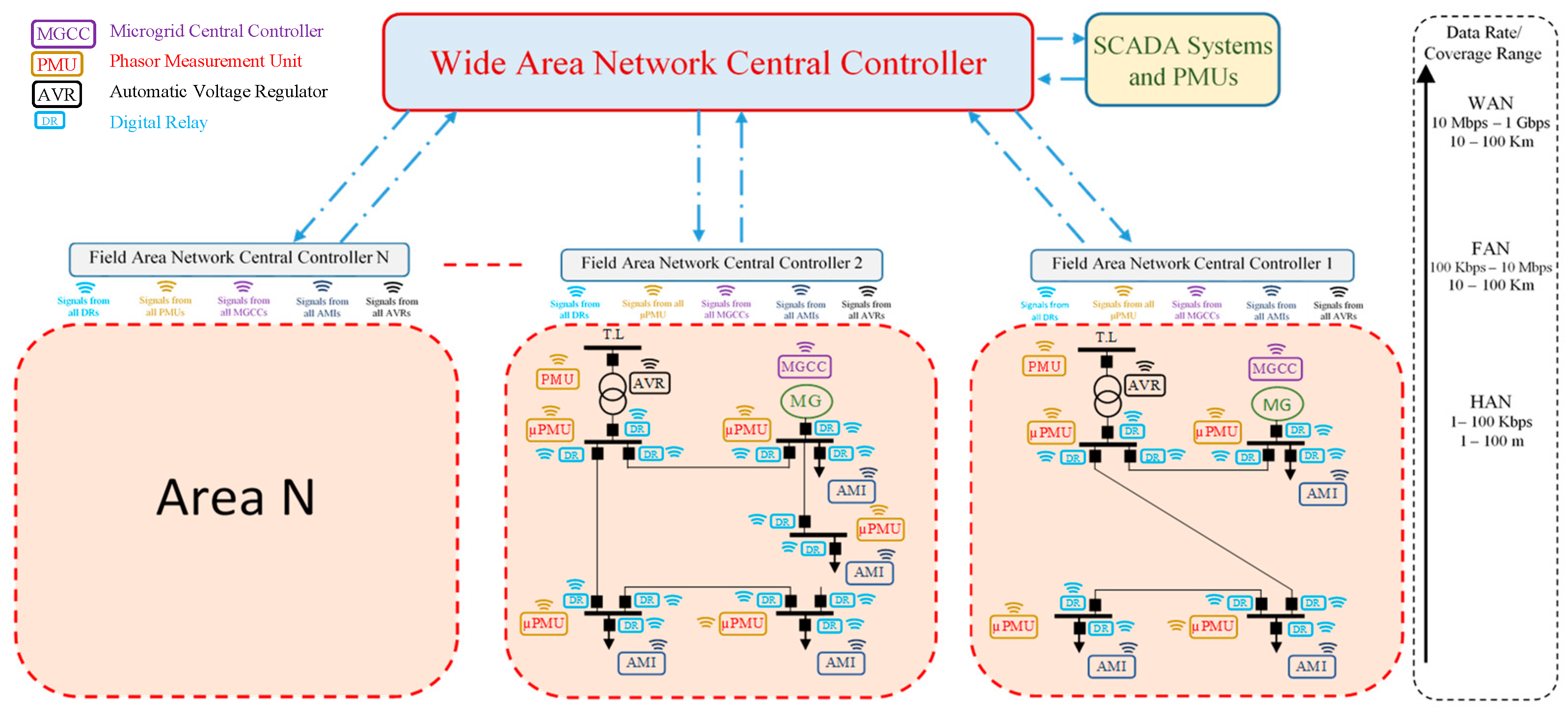
- (1)
- Home Area Network (HAN), which is suitable for short coverage ranges (i.e., up to hundreds of meters), and low communication bandwidths (i.e., up to hundreds of Kbps). HAN is mostly used in smart grid applications at the prosumer level (e.g., communication between MG assets, between smart meters and home appliances, in home automation applications). The common communication protocols used in HAN are mostly WiFi, Zigbee, and Bluetooth [65];
- (2)
- Field Area Network (FAN) is considered to be a portal to transmit information between the HAN and WAN layers. This layer is most suitable for MG communities’ applications, since the coverage ranges could be in Kilometers and the communication bandwidth could reach up to tens of Mbps. It could be realized using WiMax or LTE [66,67]. Utilities uses power line communication (PLC) for long distance communications, for real-time energy management and monitoring, which could also be utilized in FANs. PLC is preferable, since it relies on an existing infrastructure, however, it is prone to noise that is imposed on power lines, especially as the geographic foot print increases. Additionally, RF-mesh is considered to be one of the promising solutions for FAN applications (e.g., AMI applications). Its deployment is relatively cheap, and the utility does not have to rely on telecommunication providers, which introduces more confidentiality. However, these advantages could also be considered as drawbacks, since the absence of unified standard between vendors could degrade the interaction between systems, and RF-mesh has low data rate. Moreover, all radio-based communications are prone to interference, as PLC is vulnerable to noise. However, the remedy in RF-signals could be relatively easy with a mesh, as compared to PLC deploying PLC-gateways at the points showing problems could be challenging and costly [68,69,70];
- (3)
- Wide Area Network (WAN) is the layer where all the aggregated data are being processed and command signals are being sent/received to and from the portal (i.e., FAN) and then to the HAN layer. WAN’s applications are on the power transmission/generation scales since it has wide coverage ranges and considerable communication bandwidths. Fiber optics infrastructure remains to be the first choice for this layer, since it is dealing with high transmission power, but this option is costly when compared to wireless technologies. Table 1 shows some applications in the three different layers of HAN, FAN, and WAN [71,72,73].
- Processing and queueing
- Congestion of communication links due to high volume of traffic.
- Exhausting computational powers of communicating nodes also due to high volume of traffic.
- Propagation
- Distance between transceivers.
- Obstacles between transceivers, such as trees, buildings.
- Noise and interference from other devices/radio networks.
- Delays due to malicious activity
- Network flooding.
- Complete denial of service.
- Co-simulation. In this approach, software for network simulation is coupled with the power grid simulator to model the behavior of the communication network, which includes the introduction of delays. An example of these software that are used in the engineering literature are Network Simulator (NS) 2 and 3, OPNET, and OMNET++. The clocks of the network simulator and the grid simulators have to be synchronized to achieve realistic operation. This is mostly achieved through a third-party event synchronization tool.
- Network-in-the-loop simulation. In this approach, the control logic is decoupled from the simulation software, and it is implemented on hardware controllers that are interfaced with the power grid simulator through an interface which this simulator allows. There are several works in the literature that are implemented this approach, for purposes other than delay studies, where commercial Intelligent Electronic Devices were interfaced with real-time digital simulators.
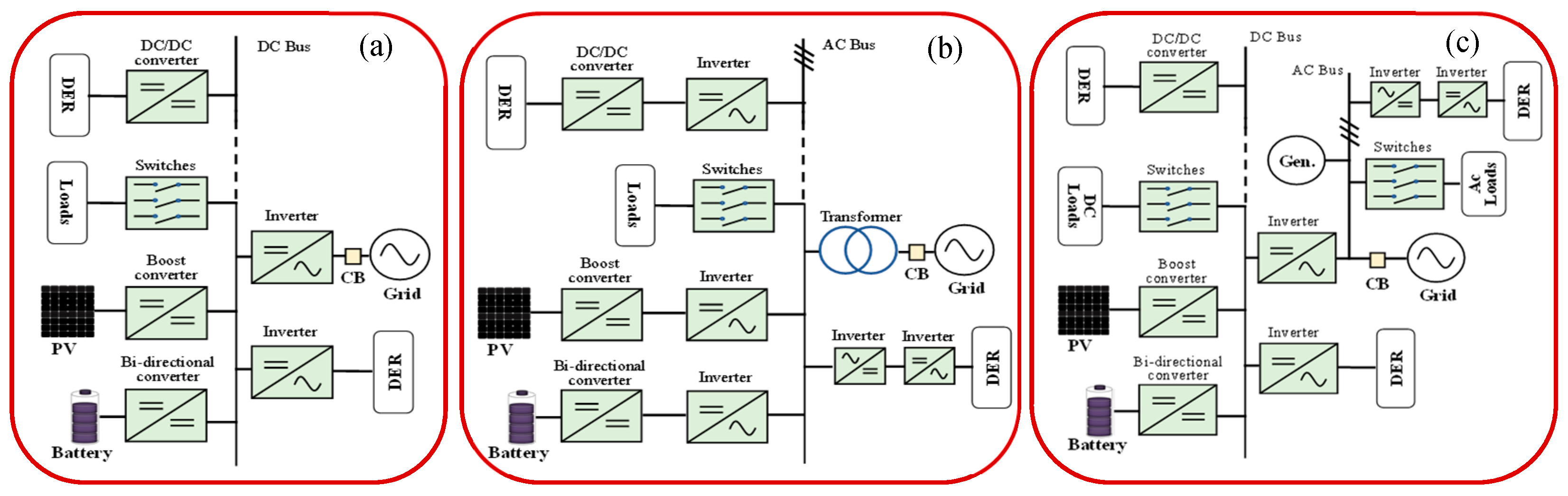
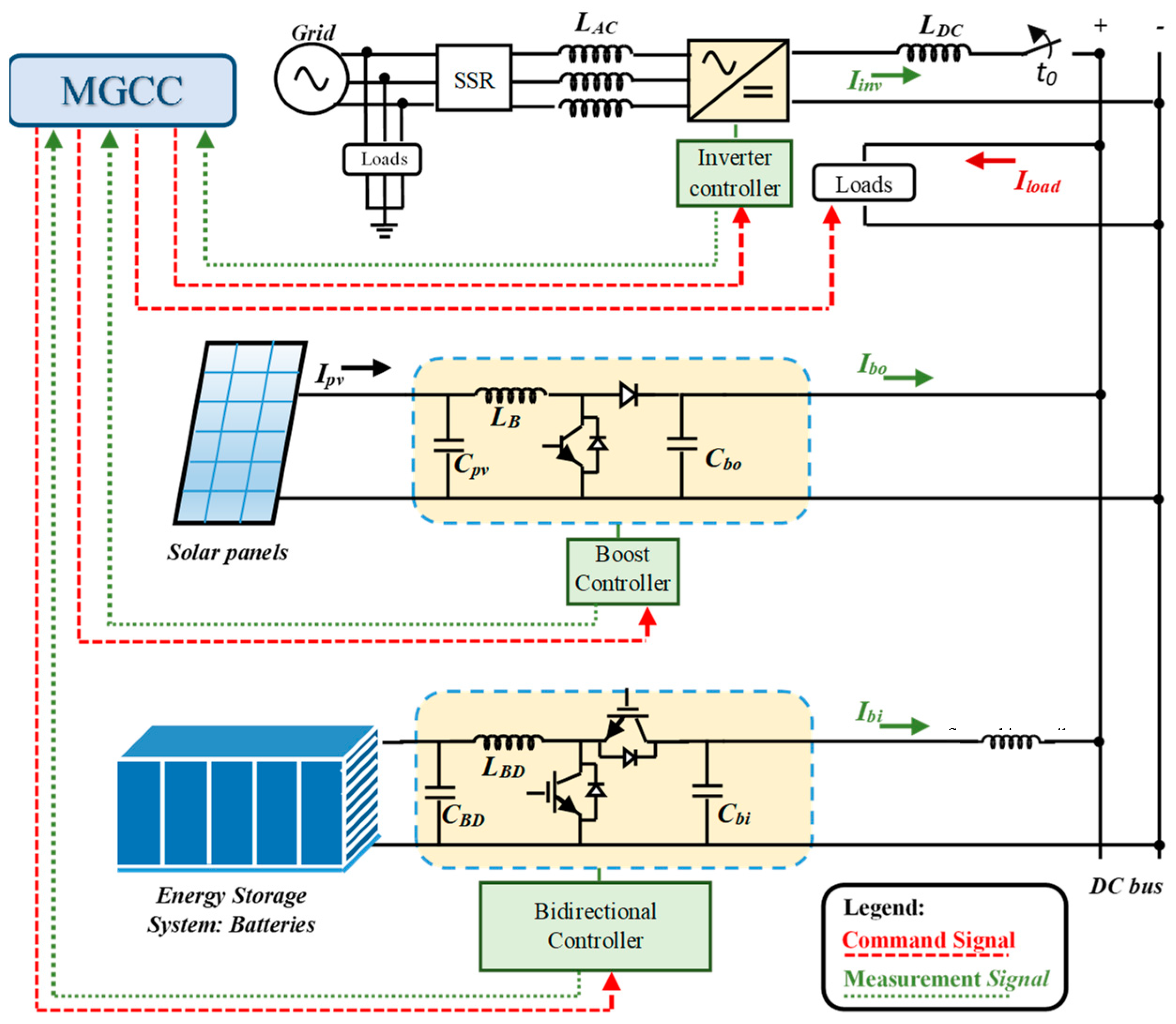
3. DC Microgrid Case Study
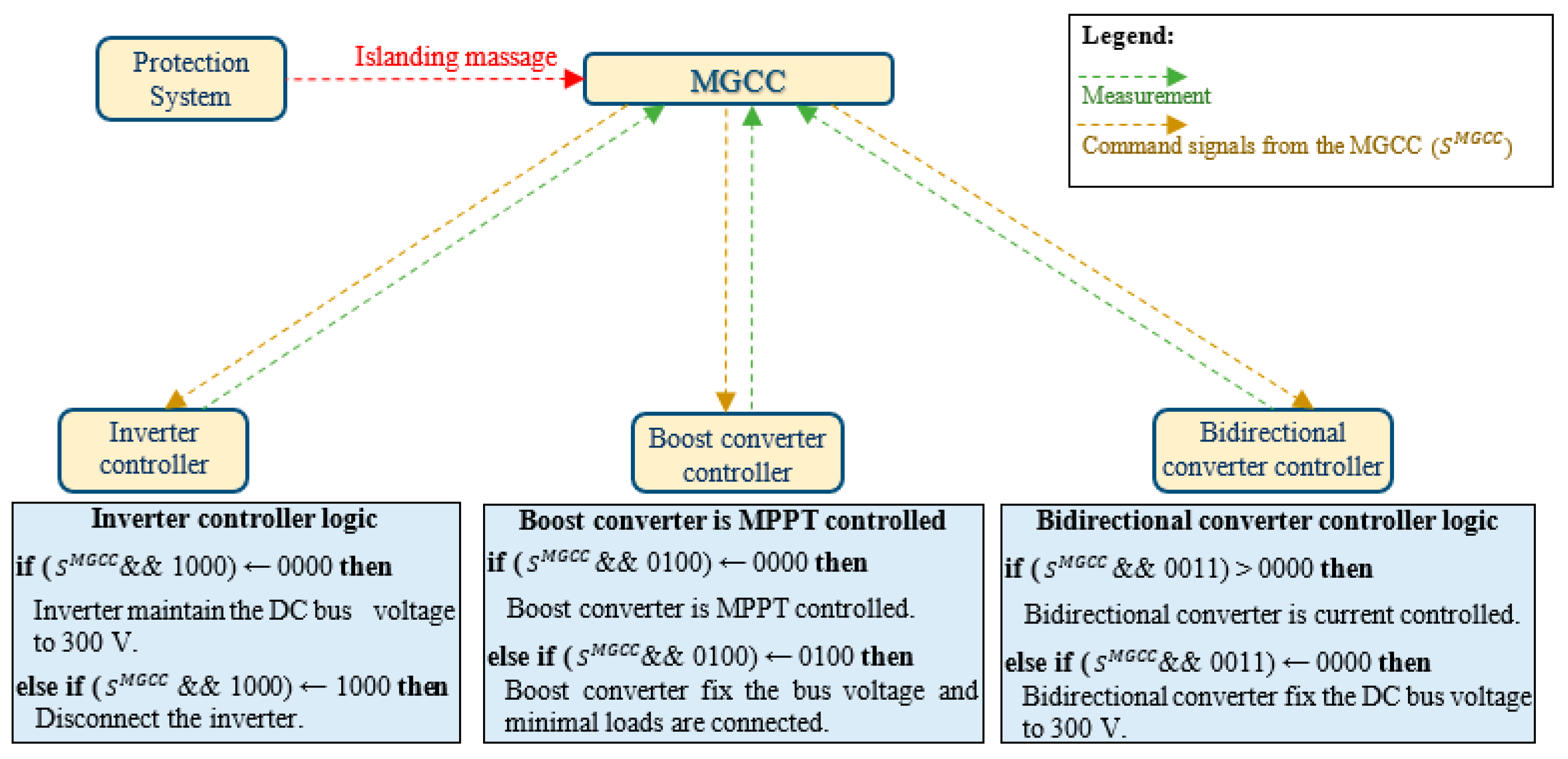
4. Control Scheme of the Studied DC Microgrid
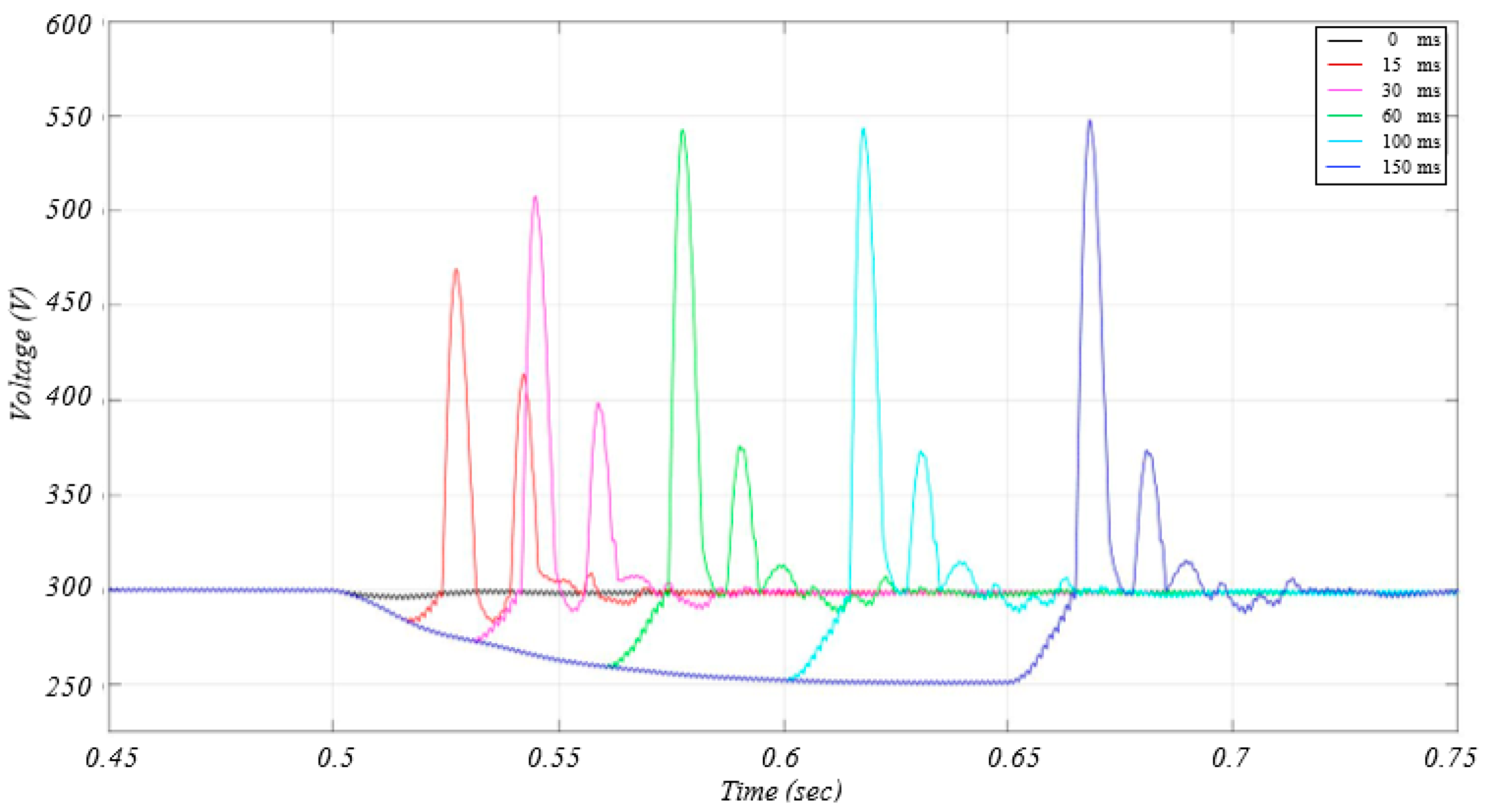
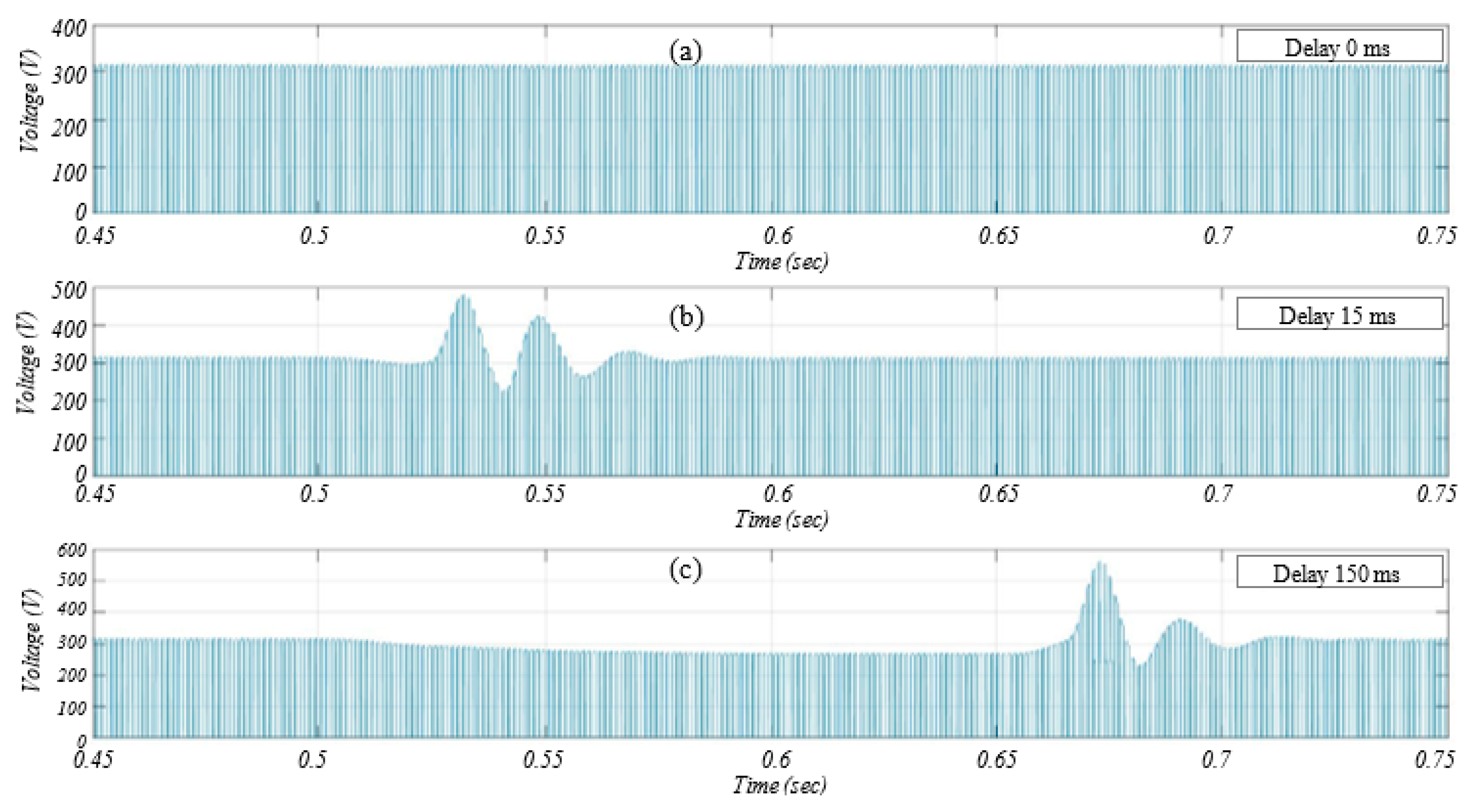
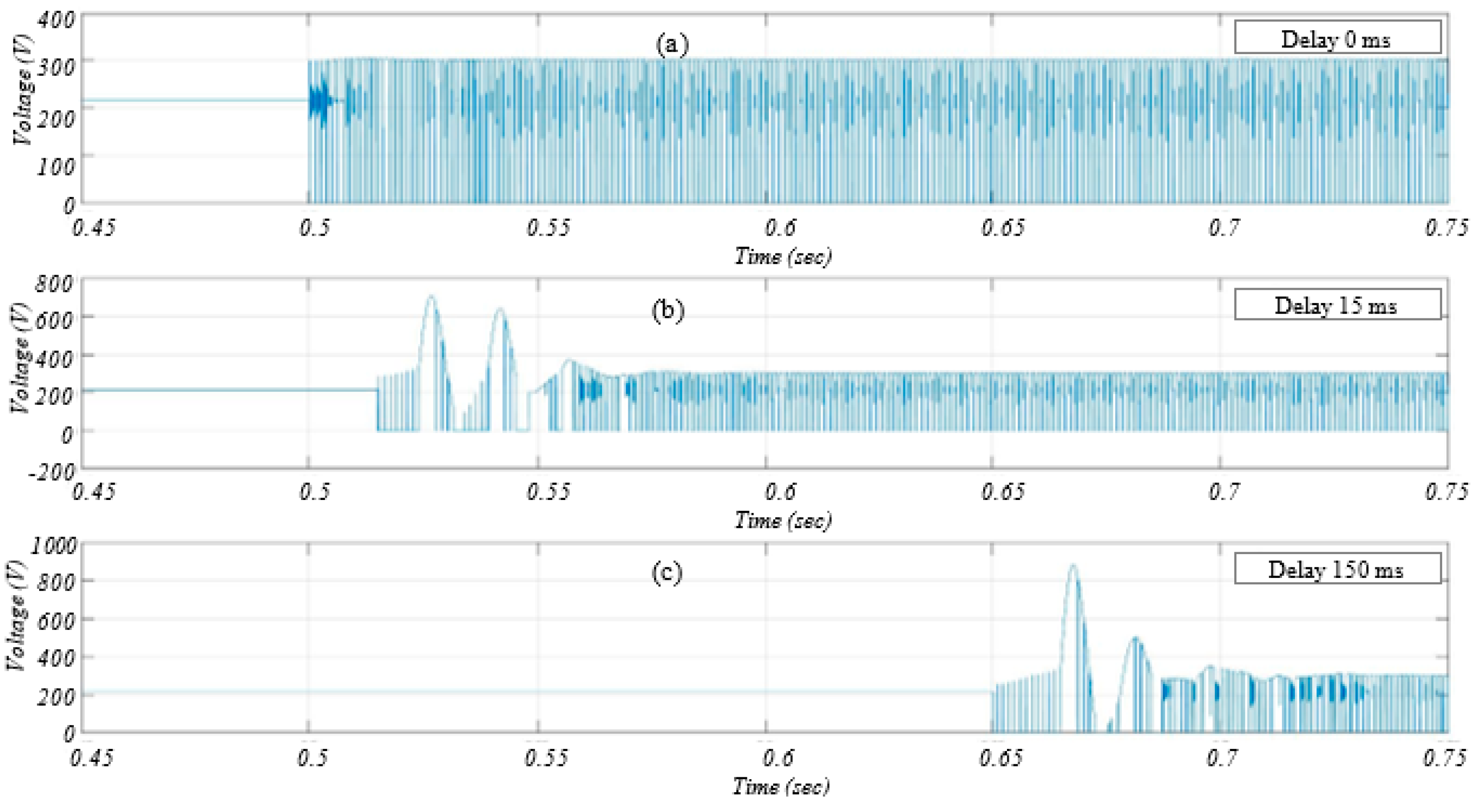
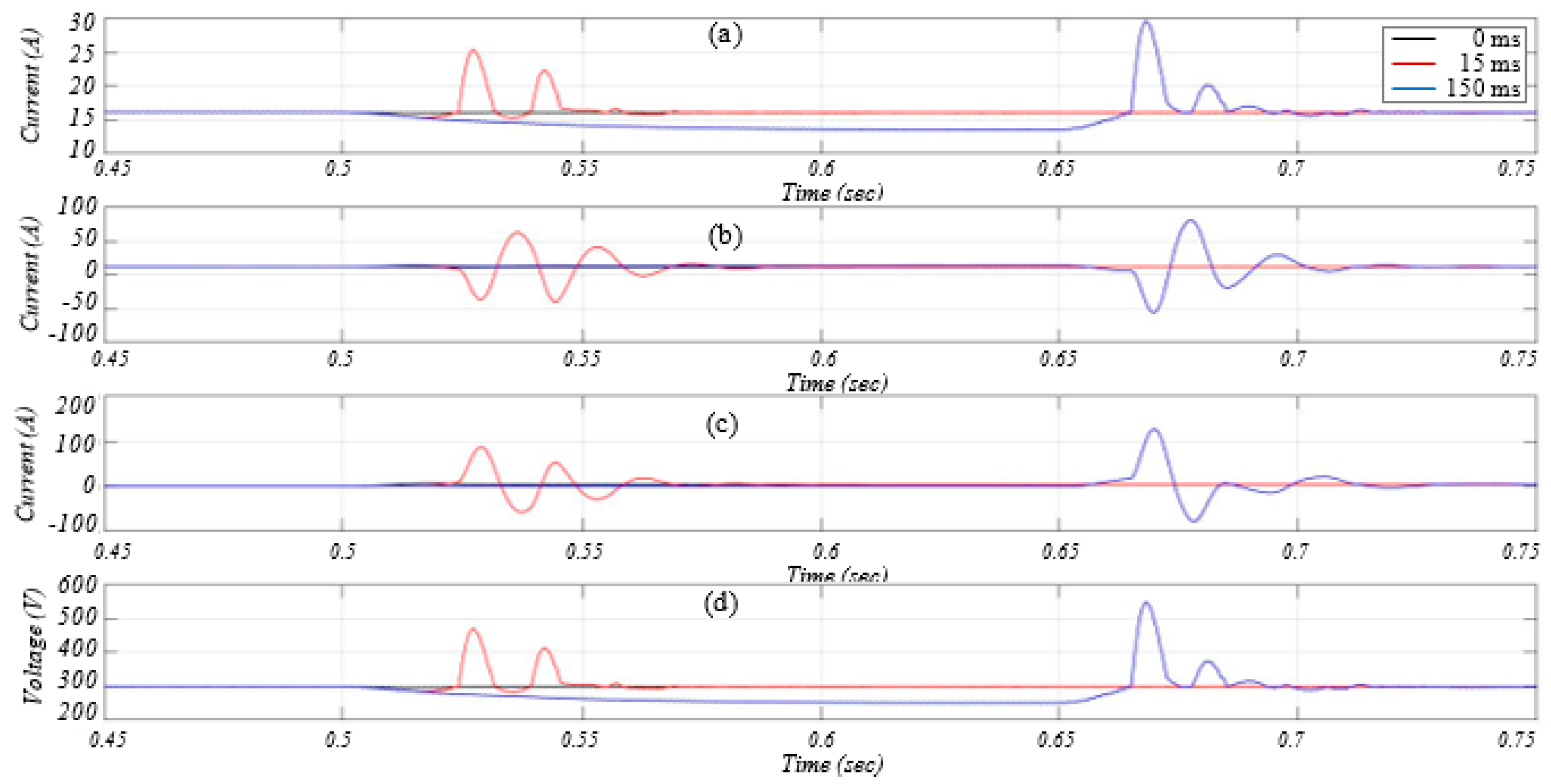
5. Results and Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wallach, P.A. U.S. Regulation of Greenhouse Gas Emissions. Governance Studies at Brookings: Washington, DC, USA, 2012. Available online: http://www.brookings.edu/research/papers/2012/10/26-climate-change-wallach (accessed on 9 June 2019).
- Integrating Renewable Energy into the Electricity Grid. Available online: http://webcache.googleusercontent.com/search?q=cache:4Pj3nzpeSjwJ:info.aee.net/hubfs/EPA/AEEI-Renewables-Grid-Integration-Case-Studies.pdf%3Ft%3D1440089933677+&cd=4&hl=en&ct=clnk&gl=us (accessed on 23 August 2018).
- Center for Climate and Energy Solutions. Regulating Power Sector Carbon Emissions. Available online: Available online: https://www.c2es.org/content/regulating-power-sector-carbon-emissions/ (accessed on 23 August 2018).
- Saleh, M.; Althaibani, A.; Esa, Y.; Mhandi, Y.; Mohamed, A.A. Impact of clustering microgrids on their stability and resilience during blackouts. In Proceedings of the International Conference on Smart Grid and Clean Energy Technologies (ICSGCE), Offenburg, Germany, 20–23 October 2015; pp. 195–200. [Google Scholar]
- Huang, Y.F.; Werner, S.; Huang, J.; Kashyap, N.; Gupta, V. State estimation in electric power grids: Meeting new challenges presented by the requirements of the future grid. Signal Process. Mag. IEEE 2012, 29, 33–43. [Google Scholar] [CrossRef]
- Smart Grid. Department of Energy. N.p., n.d. Web. June–July 2016. Available online: https://www.energy.gov/science-innovation/electric-power/smart-grid (accessed on 17 July 2019).
- Smart Grid Communications. Available online: https://www.nist.gov/programs-projects/smart-grid-communications-0 (accessed on 17 July 2019).
- Greer, C.; Wollman, D.A.; Prochaska, D.E.; Boynton, P.A.; Mazer, J.A.; Nguyen, C.T.; FitzPatrick, G.J.; Nelson, T.L.; Koepke, G.H.; Hefner, A.R., Jr.; et al. Nist Framework and Roadmap for Smart Grid Interoperability Standards, Release 3.0; US National Institute of Standards and Technology: Gaithersburg, MD, USA, 2014.
- Wu, F.F.; Moslehi, K.; Bose, A. Power system control centers: Past, present, and future. Proc. IEEE 2005, 93, 1890–1908. [Google Scholar] [CrossRef]
- Atzori, L.; Iera, A.; Morabito, G. The internet of things: A survey. Comp. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Ton, D.T.; Smith, M.A. The U.S. Department of Energy’s microgrid initiative. Electr. J. 2012, 25, 84–94. [Google Scholar] [CrossRef]
- Hatziargyriou, N. (Ed.) Microgrids: Architectures and Control; John Wiley & Sons: Hoboken, NJ, USA, 2013; pp. 4–70. [Google Scholar]
- Shahnia, F.; Bourbour, S.; Ghosh, A. Coupling neighboring microgrids for overload management based on dynamic multicriteria decision-making. IEEE Trans. Smart Grid 2017, 8, 969–983. [Google Scholar] [CrossRef]
- Marnay, C.; Chatzivasileiadis, S.; Abbey, C.; Iravani, R.; Joos, G.; Lombardi, P.; Mancarella, P.; von Appen, J. Microgrid Evolution Roadmap. In Proceedings of the International Symposium on Smart Electric Distribution Systems and Technologies (EDST), Vienna, Austria, 8–11 September 2015. [Google Scholar]
- Elsayed, A.T.; Mohamed, A.A.; Mohammed, O.A. DC microgrids and distribution systems: An overview. Electric Power Syst. Res. 2015, 119, 407–417. [Google Scholar] [CrossRef]
- Wang, F.; Pei, Y.; Boroyevich, D.; Burgos, R.; Ngo, K. AC vs. DC distribution for off-shore power delivery. In Proceedings of the IEEE 34th Annual Conference of IEEE on Industrial Electronics (IECON), Orlando, FL, USA, 10–13 November 2008; pp. 2113–2118. [Google Scholar]
- Hossain, E.; Kabalci, E.; Bayindir, R.; Perez, R. Microgrid testbeds around the world: State of art. Energy Convers. Manag. 2014, 86, 132–153. [Google Scholar] [CrossRef]
- Liu, Z.; Xu, X.; Abdelsalam, H.A.; Makram, E. Power system harmonics study for unbalanced microgrid system with PV sources and nonlinear loads. J. Power Energy Eng. (JPEE) 2015, 3, 43. [Google Scholar] [CrossRef]
- Backhaus, S.N.; Swift, G.W.; Chatzivasileiadis, S.; Tschudi, W.; Glover, S.; Starke, M.; Wang, J.; Yue, M.; Hammerstrom, D. DC Scoping Study—Estimate of Technical and Economic Benefit; LA-UR-15 22097; Los Alamos National Laboratory: Los Alamos, NM, USA, 2015. [Google Scholar]
- Jiayi, H.; Chuanwen, J.; Rong, X. A review on distributed energy resources and MicroGrid. Renew. Sustain. Energy Rev. 2008, 12, 2472–2483. [Google Scholar] [CrossRef]
- Liu, X.; Wang, P.; Loh, P.C. A hybrid AC/DC microgrid and its coordination control. IEEE Trans. Smart Grid 2011, 2, 278–286. [Google Scholar]
- Planas, E.; Andreu, J.; Gárate, J.I.; de Alegría, I.M.; Ibarra, E. AC and DC technology in microgrids: A review. Renew. Sustain. Energy Rev. 2015, 43, 726–749. [Google Scholar] [CrossRef]
- Unamuno, E.; Barrena, J.A. Hybrid AC/DC microgrids—Part I: Review and classification of topologies. Renew. Sustain. Energy Rev. 2015, 52, 1251–1259. [Google Scholar] [CrossRef]
- Sannino, A.; Postiglione, G.; Bollen, M.H. Feasibility of a DC Network for Commercial Facilities. IEEE Trans. Ind. Appl. 2003, 39, 1499–1507. [Google Scholar] [CrossRef]
- Baran, M.E.; Mahajan, N.R. DC Distribution for industrial systems: Opportunities and challenges. IEEE Trans. Ind. Appl. 2003, 39, 1596–1601. [Google Scholar] [CrossRef]
- Salomonsson, D.; Sannino, A. Low-voltage DC distribution system for commercial power systems with sensitive electronic loads. IEEE Trans. Power Deliv. 2007, 22, 1620–1627. [Google Scholar] [CrossRef]
- Majumder, R. Aggregation of microgrids with DC system. Electr. Power Syst. Res. 2014, 108, 134–143. [Google Scholar] [CrossRef]
- Sakurama, K.; Miura, M. Communication-based decentralized demand response for smart microgrids. IEEE Trans. Ind. Electron. 2016, 64, 5192–5202. [Google Scholar] [CrossRef]
- Sahoo, S.; Mishra, S. An adaptive event-triggered communication based distributed secondary control for DC microgrids. IEEE Trans. Smart Grid 2018, 9, 6674–6683. [Google Scholar] [CrossRef]
- Ci, S.; Qian, J.; Wu, D.; Keyhani, A. Impact of wireless communication delay on load sharing among distributed generation systems through smart microgrids. IEEE Wirel. Commun. 2012, 19, 24–29. [Google Scholar] [CrossRef]
- Shafiee, Q.; Dragicevic, T.; Andrade, F.; Vasquez, J.C.; Guerrero, J.M. Distributed consensus-based control of multiple dc-microgrids clusters. In Proceedings of the 40th Annual Conference of the IEEE Industrial Electronics Society (IECON 2014), Dallas, TX, USA, 29 October–1 November 2014; pp. 2056–2062. [Google Scholar] [CrossRef]
- Dragičević, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC microgrids—Part I: A review of control strategies and stabilization techniques. IEEE Trans. Power Electron. 2016, 31, 4876–4891. [Google Scholar] [CrossRef]
- Johnson, B.K.; Lasseter, R.H.; Alvarado, F.L.; Adapa, R. Expandable multiterminal DC system based on voltage droop. IEEE Trans. Power Deliv. 1993, 8, 1926–1932. [Google Scholar] [CrossRef]
- Nasirian, V.; Moayedi, S.; Davoudi, A.; Lewis, F. Distributed cooperative control of DC microgrids. IEEE Trans. Power Electron. 2015, 30, 2288–2303. [Google Scholar] [CrossRef]
- Ito, Y.; Zhongqing, Y.; Akagi, H. DC microgrid based distribution power generation system. In Proceedings of the 4th International Power Electronics and Motion Control Conference, Xi’an, China, 14–16 August 2004; pp. 1740–1745. [Google Scholar]
- Lu, X.; Guerrero, J.M.; Sun, K.; Vasquez, J.C. An improved droop control method for DC microgrids based on low bandwidth communication with dc bus voltage restoration and enhanced current sharing accuracy. IEEE Trans. Power Electron. 2014, 29, 1800–1812. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; De Vicuña, L.G.; Castilla, M. Hierarchical control of droop-controlled ac and dc microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Nasirian, V.; Davoudi, A.; Lewis, F.L.; Guerrero, J.M. Distributed adaptive droop control for DC distribution systems. IEEE Trans. Energy Convers. 2014, 29, 944–956. [Google Scholar] [CrossRef]
- Shafiee, Q.; Guerrero, J.M.; Vasquez, J.C. Distributed secondary control for islanded microgrids—A novel approach. IEEE Trans. Power Electron. 2014, 29, 1018–1031. [Google Scholar] [CrossRef]
- Wang, P.; Lu, X.; Yang, X.; Wang, W.; Xu, D. An improved distributed secondary control method for DC microgrids with enhanced dynamic current sharing performance. IEEE Trans. Power Electr. 2016, 31, 6658–6673. [Google Scholar] [CrossRef]
- Vu, T.V.; Paran, S.; Diaz-Franco, F.; El-Mezyani, T.; Edrington, C.S. An alternative distributed control architecture for improvement in the transient response of DC microgrids. IEEE Trans. Ind. Electron. 2017, 64, 574–584. [Google Scholar] [CrossRef]
- Guo, F.; Xu, Q.; Wen, C.; Wang, L.; Wang, P. Distributed secondary control for power allocation and voltage restoration in islanded DC microgrids. IEEE Trans. Sustain. Energy 2018, 9, 1857–1869. [Google Scholar] [CrossRef]
- Saleh, M.; Esa, Y.; Mohamed, A. Communication based control for DC microgrids. IEEE Trans. Smart Grid 2018, 10, 2180–2195. [Google Scholar] [CrossRef]
- Marwali, M.; Jung, J.; Keyhani, A. Control of distributed generation systems-part II: Load sharing control. IEEE Trans. Power Electron. 2004, 9, 1551–1561. [Google Scholar] [CrossRef]
- Byun, Y.B.; Koo, T.G.; Joe, K.Y.; Kim, E.S.; Seo, J.I.; Kim, D.H. Parallel operation of three-phase UPS inverters by wireless load sharing control. In Proceedings of the Twenty-Second International Telecommunications Energy Conference (Cat. No.00CH37131), Phoenix, AZ, USA, 10–14 September 2000; pp. 526–532. [Google Scholar]
- Marwali, M.N.; Jung, J.W.; Keyhani, A. Control of distributed generation systems-part I: Load sharing control. IEEE Trans. Power Electron. 2004, 19, 1541–1550. [Google Scholar] [CrossRef]
- Wu, D.; Ci, S.; Wang, H.; Katsaggelos, A.K. Application-centric routing for video streaming over multi-hop wireless networks. IEEE Trans. Circuits Syst. Video Tech. 2010, 20, 1721–1734. [Google Scholar] [CrossRef]
- Zhong, Q.; Weiss, G. A Unified smith predictor based on the spectral decomposition of the plant. Int. J. Control 2004, 77, 1362–1371. [Google Scholar] [CrossRef]
- Shafiee, Q.; Dragičević, T.; Vasquez, J.C.; Guerrero, J.M. Hierarchical control for multiple DC-microgrids clusters. IEEE Trans. Energy Convers. 2014, 29, 922–933. [Google Scholar] [CrossRef]
- Lai, J.; Zhou, H.; Hu, W.; Lu, X.; Zhong, L. Synchronization of hybrid microgrids with communication latency. Math. Probl. Eng. 2015, 2015, 10. [Google Scholar] [CrossRef]
- Macana, C.A.; Mojica-Nava, E.; Quijano, N. Time-delay effect on load frequency control for microgrids. In Proceedings of the 2013 10th IEEE International Conference on Networking, Sensing and Control (ICNSC), Evry, France, 10–12 April 2013; pp. 544–549. [Google Scholar] [CrossRef]
- Ebenbauer, C.; Allgower, F. Stability analysis for time-delay systems using rekasius’s substitution and sum of squares. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 5376–5381. [Google Scholar] [CrossRef]
- Liu, S.; Wang, X.; Liu, P.X. Impact of communication delays on secondary frequency control in an islanded microgrid. IEEE Trans. Ind. Electron. 2015, 62, 2021–2031. [Google Scholar] [CrossRef]
- Wang, X.; Freitas, W.; Dinavahi, V.; Xu, W. Investigation of positive feedback anti-islanding control for multiple inverter-based distributed generators. IEEE Trans. Power Syst. 2009, 24, 785–795. [Google Scholar] [CrossRef]
- Tonkoski, R.; Turcotte, D.; L-Fouly, T.H.M.E. Impact of high PV penetration on voltage profiles in residential neighborhoods. IEEE Trans. Sustain. Energy 2012, 3, 518–527. [Google Scholar] [CrossRef]
- Dick, E.P.; Narang, A. Canadian Urban Benchmark Distribution System; Varennes CETC: Varennes, QC, Canada, 2005; pp. 2005–2121. [Google Scholar]
- Saleh, M.; Esa, Y.; Mohamed, A. Impact of communication latency on the bus voltage of centrally controlled DC microgrid during islanding. IEEE Trans. Sustain. Energy 2018, 1. [Google Scholar] [CrossRef]
- Ancillotti, E.; Bruno, R.; Conti, M. The role of communication systems in smart grids: Architectures, technical solutions and research challenges. Comp. Commun. 2013, 36, 1665–1697. [Google Scholar] [CrossRef]
- Fan, Z.; Kulkarni, P.; Gormus, S.; Efthymiou, C.; Kalogridis, G.; Sooriyabandara, M.; Zhu, Z.; Lambotharan, S.; Chin, W.H. Smart grid communications: Overview of research challenges, solutions, and standardization activities. IEEE Commun. Surv. Tutor. 2013, 15, 21–38. [Google Scholar] [CrossRef]
- IEEE. Guide for Monitoring, Information Exchange, and Control of Distributed Resources Interconnected with Electric Power Systems; IEEE Std 1547.3-2007; IEEE: New York, NY, USA, 2007; pp. 1–160. [Google Scholar]
- Ku, T.; Park, W.; Choi, H. IoT energy management platform for microgrid. In Proceedings of the 2017 IEEE 7th International Conference on Power and Energy Systems (ICPES), Toronto, ON, Canada, 1–3 November 2017; pp. 106–110. [Google Scholar] [CrossRef]
- Majee, A.; Swathika, O.V.G. IoT based reconfiguration of microgrids through an automated central protection centre. In Proceedings of the 2017 International Conference on Power and Embedded Drive Control (ICPEDC), Chennai, India, 16–18 March 2017; pp. 93–97. [Google Scholar] [CrossRef]
- IoT-Based State Estimation for Microgrids—IEEE Journals & Magazine. Available online: https://ieeexplore.ieee.org/document/8255584 (accessed on 5 November 2018).
- Kuzlu, M.; Pipattanasomporn, M.; Rahman, S. Communication network requirements for major smart grid applications in HAN, NAN and WAN. Comput. Netw. 2014, 67, 74–88. [Google Scholar] [CrossRef]
- Safdar, S.; Hamdaoui, B.; Cotilla-Sanchez, E.; Guizani, M. A Survey on Communication Infrastructure for Micro-grids. In Proceedings of the 2013 9th International Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; pp. 545–550. [Google Scholar]
- Llaria, A.; Terrasson, G.; Curea, O.; Jimenez, J. Application of Wireless Sensor and Actuator Networks to Achieve Intelligent Microgrids: A Promising Approach towards a Global Smart Grid Deployment. Appl. Sci. 2016, 6, 61. [Google Scholar] [CrossRef]
- Kuzlu, M. Assessment of communication technologies and network requirements for major smart grid applications. In Proceedings of the 2013 IEEE PES innovative smart grid technologies conference (ISGT), Washington, DC, USA, 24–27 February 2013. [Google Scholar]
- Lichtensteiger, B.; Bjelajac, B.; Müller, C.; Wietfeld, C. RF mesh systems for smart metering: System architecture and performance. In Proceedings of the 2010 IEEE International Conference on Smart Grid Communications (SmartGridComm), Gaithersburg, MD, USA, 4–6 October 2010. [Google Scholar]
- Malandra, F.; Sanso, B. PeRF-Mesh: A performance analysis tool for large scale RF-mesh-based smart meter networks with FHSS. In Proceedings of the 2015 IEEE International Conference on Smart Grid Communications (SmartGridComm), Miami, FL, USA, 2–5 November 2015; pp. 792–797. [Google Scholar] [CrossRef]
- White, B. Power Line Communications vs. Radio Frequency Communications. September 2018. Available online: https://www.cimconlighting.com/blog/power-line-communications-vs.-radio-frequency-communications (accessed on 17 July 2019).
- Webster, R.; Munasinghe, K.; Jamalipour, A. Optimal resource allocation for smart grid applications in high traffic wireless networks. In Proceedings of the 2014 IEEE International Conference on Smart Grid Communications (SmartGridComm), Venice, Italy, 3–6 November 2014; pp. 398–403. [Google Scholar] [CrossRef]
- Emmanuel, M.; Seah, W.K.G.; Rayudu, R. Communication Architecture for Smart Grid Applications. Available online: https://ecs.victoria.ac.nz/foswiki/pub/Groups/WiNe/ResearchPublications/architecture_embfonts.pdf (accessed on 17 July 2019).
- Communication technologies and networks for Smart Grid and Smart Metering By CDG 450 Connectivity Special Interest Group (450 SIG). Available online: http://www.cdg.org/resources/files/white_papers/CDG450SIG_Communication%20_Technologies_Networks_Smart_Grid_Smart_Metering_SEPT2013.pdf (accessed on 30 July 2019).
- Zhang, B.; Ng, T.S.; Nandi, A.; Riedi, R.; Druschel, P.; Wang, G. Measurement-Based Analysis, Modeling, and Synthesis of the Internet Delay Space. Study at Rice University. Available online: https://www.cs.rice.edu/~eugeneng/papers/IMC06.pdf (accessed on 10 June 2019).
- Rubin, I. Path delays in communication networks. Appl. Math. Optim. 1975, 1, 193–221. [Google Scholar] [CrossRef]
- Albagli, A.N.; Falcão, D.M.; de Rezende, J.F. Smart grid framework co-simulation using HLA architecture. Electr. Power Syst. Res. 2016, 130, 22–33. [Google Scholar] [CrossRef]
- Bhor, D.; Angappan, K.; Sivalingam, K.M. Network and power-grid co-simulation framework for Smart Grid widearea monitoring networks. J. Netw. Comp. Appl. 2016, 59, 274–284. [Google Scholar] [CrossRef]
- Boroojeni, K.; Amini, M.H.; Nejadpak, A.; Dragičević, T.; Iyengar, S.S.; Blaabjerg, F. A novel cloud-based platform for implementation of oblivious power routing for clusters of microgrids. IEEE Access 2017, 5, 607–619. [Google Scholar] [CrossRef]
- Celli, G.; Pegoraro, P.A.; Pilo, F.; Pisano, G.; Sulis, S. DMS cyberphysical simulation for assessing the impact of state estimation and communication media in smart grid operation. IEEE Trans. Power Syst. 2014, 29, 2436–2446. [Google Scholar] [CrossRef]
- Saleh, M.; Esa, Y.; Mohamed, A. Hardware based testing of communication based control for dc microgrid. In Proceedings of the International Conference on Renewable Energy Research and Applications (ICRERA), San Diego, CA, USA, 5–8 November 2017. [Google Scholar]
- Saleh, M.; Esa, Y.; Mhandi, Y.; Brandauer, W.; Mohamed, A. Design and implementation of CCNY DC microgrid testbed. In Proceedings of the 2016 IEEE Industry Applications Society Annual Meeting, Portland, OR, USA, 2–6 October 2016. [Google Scholar]
- Saleh, M.; Esa, Y.; Moahmed, A. Centralized control for DC microgrid using finite state machine. In Proceedings of the IEEE Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 23–26 April 2017. [Google Scholar]
- Saleh, M.; Esa, Y.; Mohamed, A. Application of complex network analysis in electric power systems. Energies 2018, 11, 1381. [Google Scholar] [CrossRef]
- Saleh, M.; Esa, Y.; Moahmed, A. Energy management algorithm for resilient controlled delivery grids. In Proceedings of the Industry and Application Society (IAS) Conference, Cincinnati, OH, USA, 1–5 October 2017. [Google Scholar]
- Saleh, M.; Dutta, O.; Esa, Y.; Moahmed, A. Quantitative analysis of regenerative energy in electric rail traction systems. In Proceedings of the Industry and Application Society (IAS) Conference, Cincinnati, OH, USA, 1–5 October 2017. [Google Scholar]
- Saleh, M.; Esa, Y.; Mohamed, A. Optimal microgrids placement in electric distribution systems using complex network framework. In Proceedings of the International Conference on Renewable Energy Research and Applications (ICRERA), San Diego, CA, USA, 5–8 November 2017. [Google Scholar]
- Choi, J.; Jeong, H.; Choi, J.; Won, D.; Ahn, S.; Moon, S. Voltage control scheme with distributed generation and grid connected converter in a DC microgrid. Energies 2014, 7, 6477–6491. [Google Scholar] [CrossRef]
- Sherazi, H.; Iqbal, R.; Hassan, S.; Chaudary, M.; Gilani, S. ZigBee’s received signal strength and latency evaluation under varying environments. J. Comp. Netw. Commun. 2016, 2016, 8. [Google Scholar] [CrossRef]
- Laner, M.; Svoboda, P.; Romirer, P.; Nikaein, N.; Ricciato, F. A comparison between one-way delays in operating HSPA and LTE networks. In Proceedings of the 2012 10th International Symposium on Modeling and Optimization in Mobile, Ad Hoc and Wireless Networks (WiOpt), Paderborn, Germany, 14–18 May 2012. [Google Scholar]
- Swappa: Reti Wireless—Zigbee. N.p., n.d. Web. October–November 2016. Available online: http://www.swappa.it/wiki/Uni/RW-13Aprile (accessed on 17 July 2019).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Home Area Network | ||
| Example of Applications | Average Allowable Latency Ranges | Communication Technologies |
| Microgrids | msec.–sec. |
|
| Building automation | seconds | |
| Field Area Network | ||
| Pricing | <1 min |
|
| Demand response | <1 min | |
| Electric transportation (e.g., pricing info, charge status) | <15 s | |
| Wide Area Network | ||
| Adaptive islanding | <0.1 s |
|
| Voltage stability monitoring | <5 s | |
| Converter | Component | Value |
|---|---|---|
| Bidirectional converter | LBD | 4.5 mH, 0.25 Ohm |
| CBD | 890 μF | |
| Smoothing coil | 8 mH, 1 Ohm | |
| Boost converter | LB | 4.5 mH, 0.25 Ohm |
| Cpv | 1200 μF | |
| Inverter | LDC | 19 m H, 1.4 Ohm |
| CDC | 1488 μF | |
| LAC | 3-phase each (19 mH, 1 Ohm) |
| Converter | Control Technique | Outer Loop | Inner Loop | ||||
|---|---|---|---|---|---|---|---|
| Charge | Discharge | ||||||
| Kp | Ki | Kp | Ki | Kp | Ki | ||
| Bidirectional converter | Current control | N/A | N/A | 0.02 | 110 | 0.02 | 3 |
| Voltage control | 3 | 1 | 0.002 | 10 | 0.02 | 3 | |
| Outer Loop | Id | Iq | |||||
| Inverter | Voltage control | 0.1 | 10 | 192.1 | 97671 | 192.1 | 97671 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saleh, M.; Esa, Y.; Hariri, M.E.; Mohamed, A. Impact of Information and Communication Technology Limitations on Microgrid Operation. Energies 2019, 12, 2926. https://doi.org/10.3390/en12152926
Saleh M, Esa Y, Hariri ME, Mohamed A. Impact of Information and Communication Technology Limitations on Microgrid Operation. Energies. 2019; 12(15):2926. https://doi.org/10.3390/en12152926
Chicago/Turabian StyleSaleh, Mahmoud, Yusef Esa, Mohamed El Hariri, and Ahmed Mohamed. 2019. "Impact of Information and Communication Technology Limitations on Microgrid Operation" Energies 12, no. 15: 2926. https://doi.org/10.3390/en12152926
APA StyleSaleh, M., Esa, Y., Hariri, M. E., & Mohamed, A. (2019). Impact of Information and Communication Technology Limitations on Microgrid Operation. Energies, 12(15), 2926. https://doi.org/10.3390/en12152926