In this section, a timetable optimization model with a mixed-integer non-linear formulation is proposed to minimize the energy consumption in the planning horizon. The urban rail line is defined as a line network with a platform and track, which represent the node and link, respectively. The notations of the model are defined in the following.
3.2. Energy Consumption Function
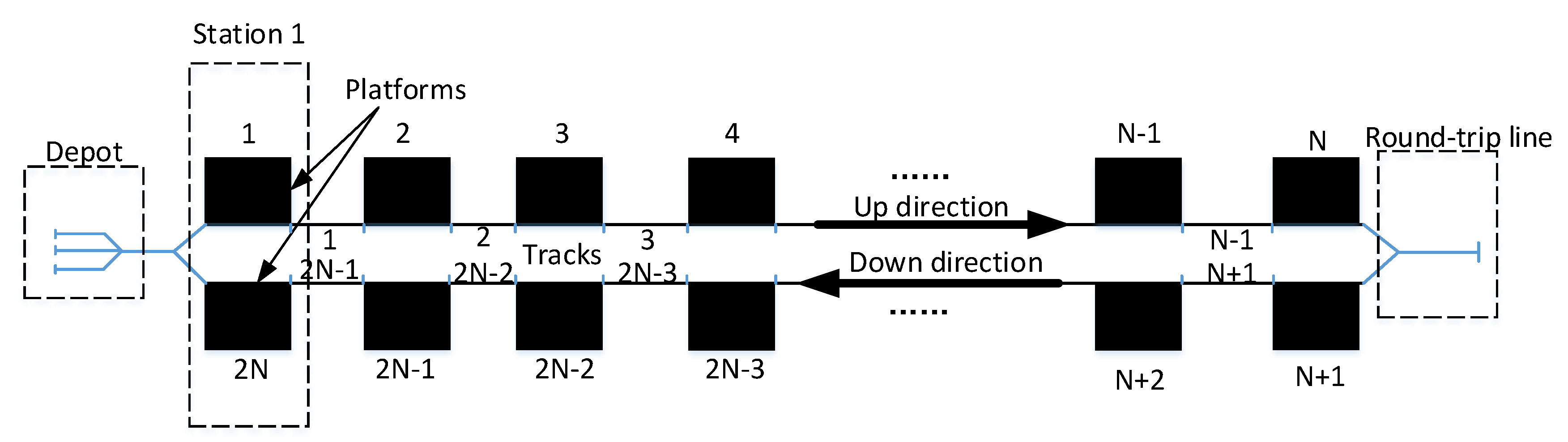
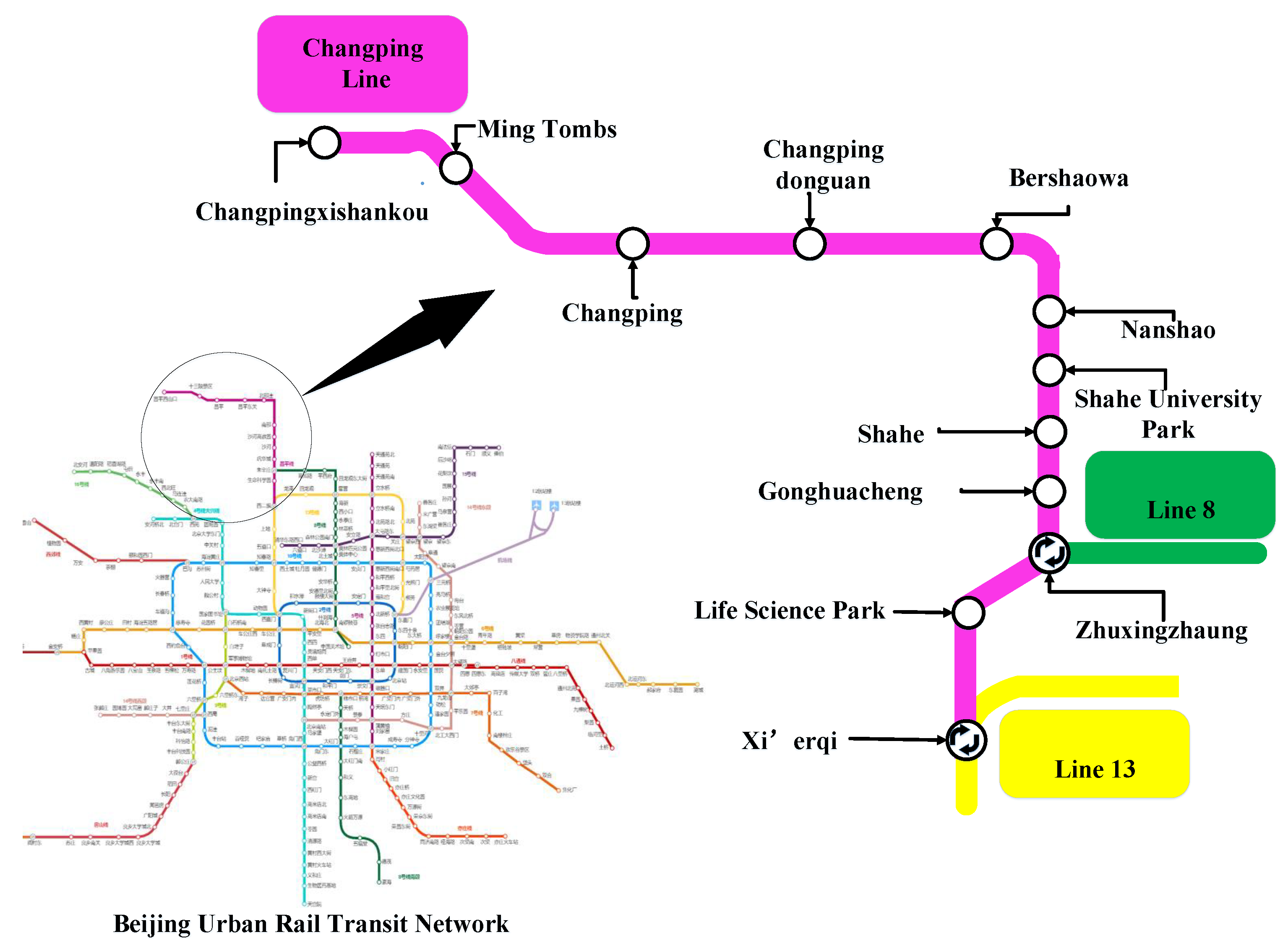
A bi-directional line network was taken into account. There are
N stations and
platforms, as shown in
Figure 2. Station set
, and platform set
. For the sake of clarity, platforms
are set in the upward direction, and platforms
are in the downward direction. Therefore,
links (tracks)
and two round-trip lines connect the
platforms.
links (tracks) are in the upward direction, while
are also in the downward direction. In particular,
N and
are excluded from set
T, which actually correspond to the round-trips. Number
N can be the round-trip line at the back of the station
N, and number
can represent the round-trip to the depot before Station 1. We can see that if station
, then
and
. For each track
, there are some attributes: length of track
and maximum and minimum average velocity
and
(for the technology requirement and safety considerations of the rail line).
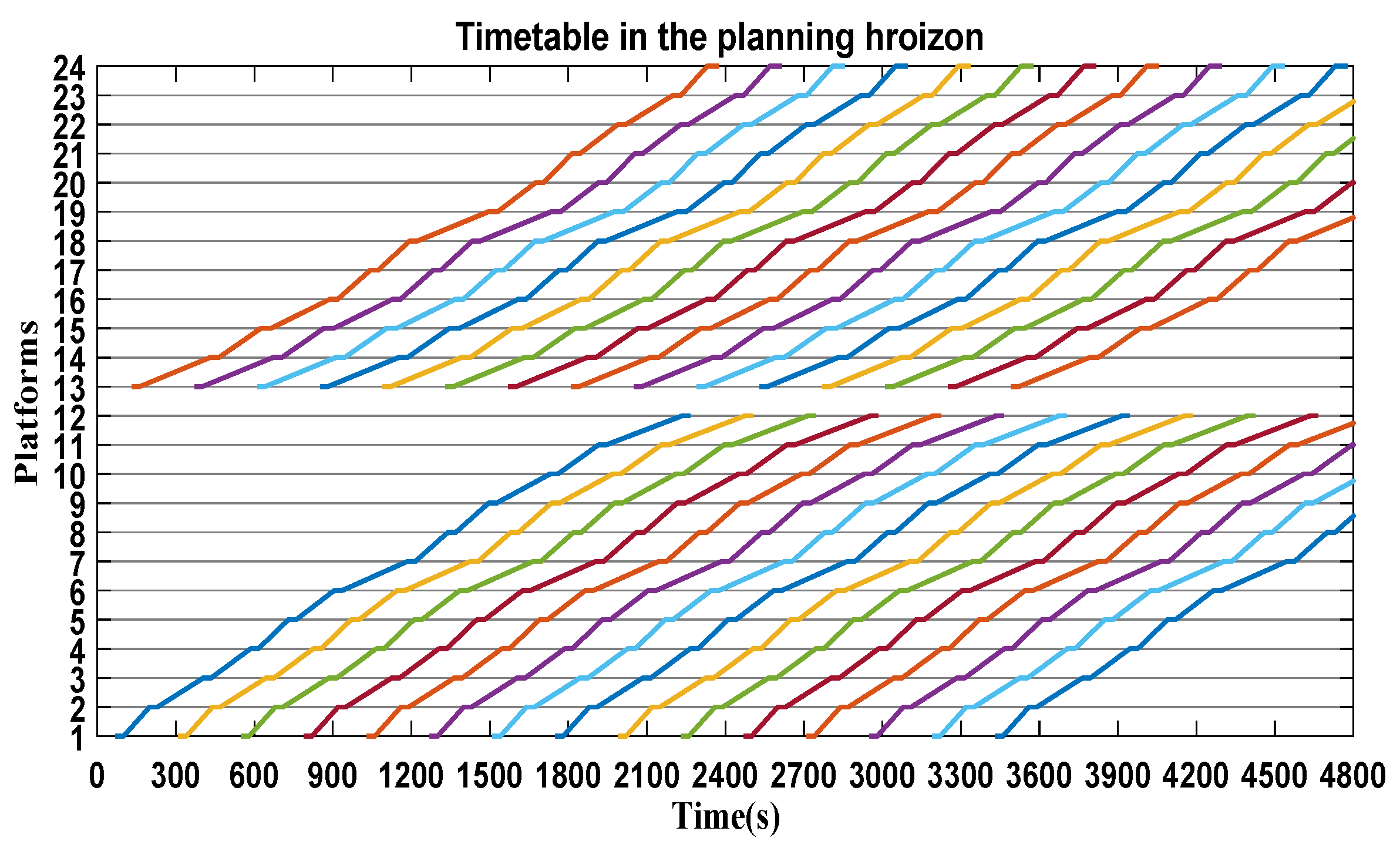
When the passenger demands and passenger-oriented objectives are considered to design a more energy-efficient timetable, both the departure and arrival time at each platform need to be determined. As the time is obtained, the trains will repeat the same running cycle with an interval of headway time (h), which is called the periodic timetable. The period usually lasts for 1–2 h. For instance, there is a cycle of 1 h in the evening peak from 17:30–18:30 in many metropolises. In the planning horizon,
denotes the first arrival time at platform
, while
denotes the first departure time at platform
, and
represents the running speed at an average level on tracks
. Therefore, the average running time of track
t can be calculated using the formula
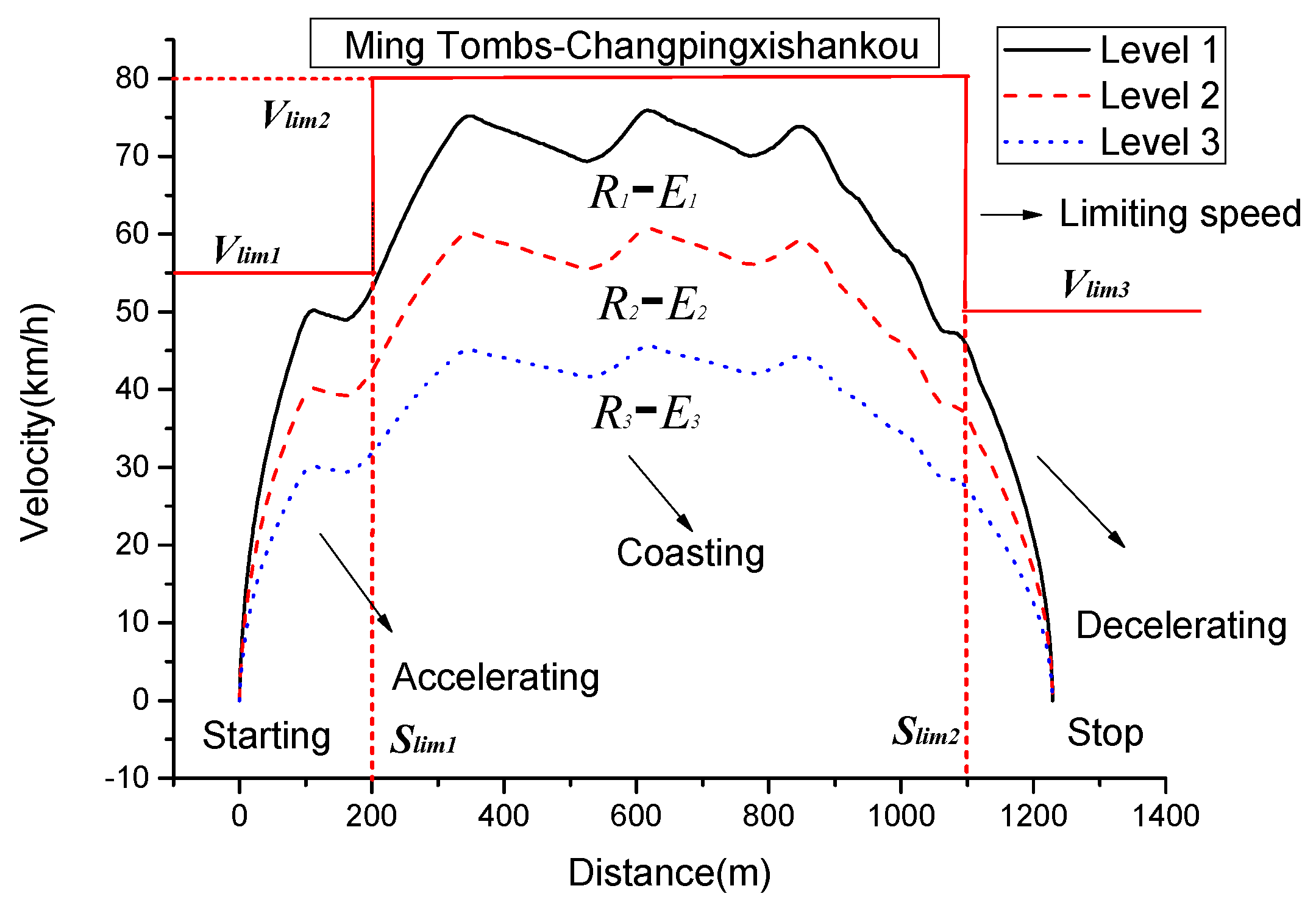
. To pursue the optimal energy consumption, once the average speed is given in each track, the train will be operated under the optimal profile, as mentioned in Howlett et al. (2009) [
39], with the Pontryagin maximum principle.
There are several parts of energy consumption during the running process:
- (1)
Energy consumption that comes from the running resistance .
- (2)
Energy consumption that is from the air volume, which is absorbed by the train .
- (3)
Energy consumption that comes from the aerodynamic resistance .
- (4)
Energy consumption that offsets the kinetic energy, which is from the variation of the train on the tracks .
Then, we can calculate the total energy consumption in the track
t as follows:
The total energy is a quadratic polynomial in , which is an increasing function of the passenger load and speed. In this study, the total energy with various passenger loads is assumed to be a direct ratio to its growth. Furthermore, we can obtain the basic energy consumption of an empty train from the real recorded data. That is to say, if we get the passenger load and train mass, we can calculate the total energy.
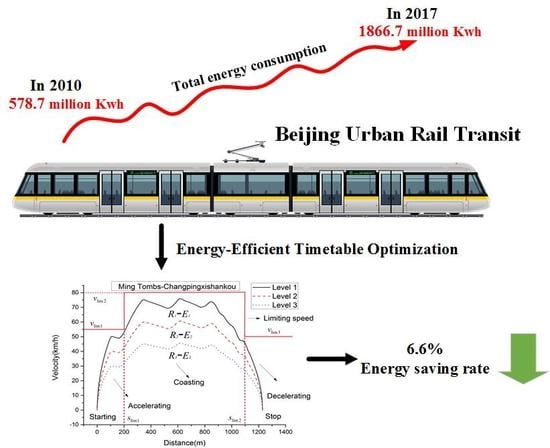
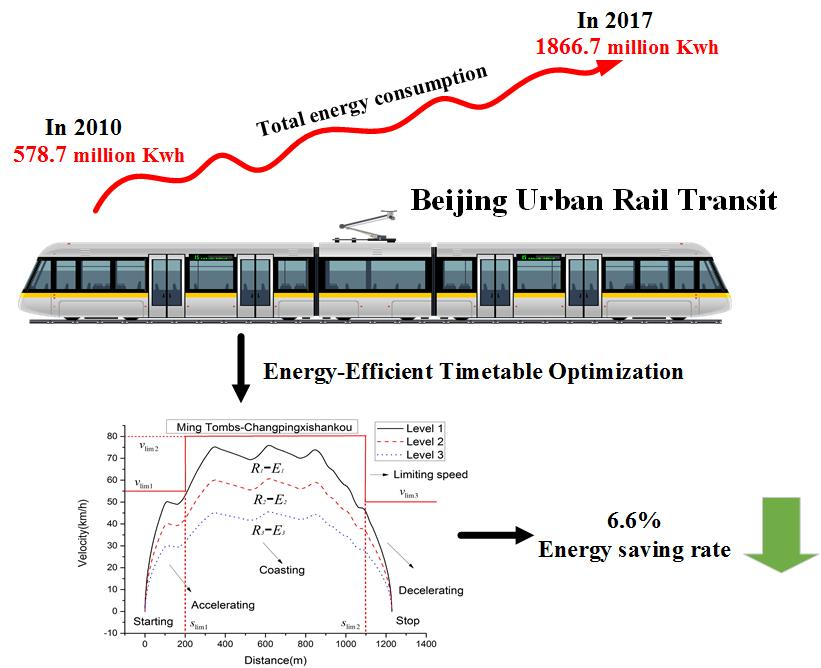
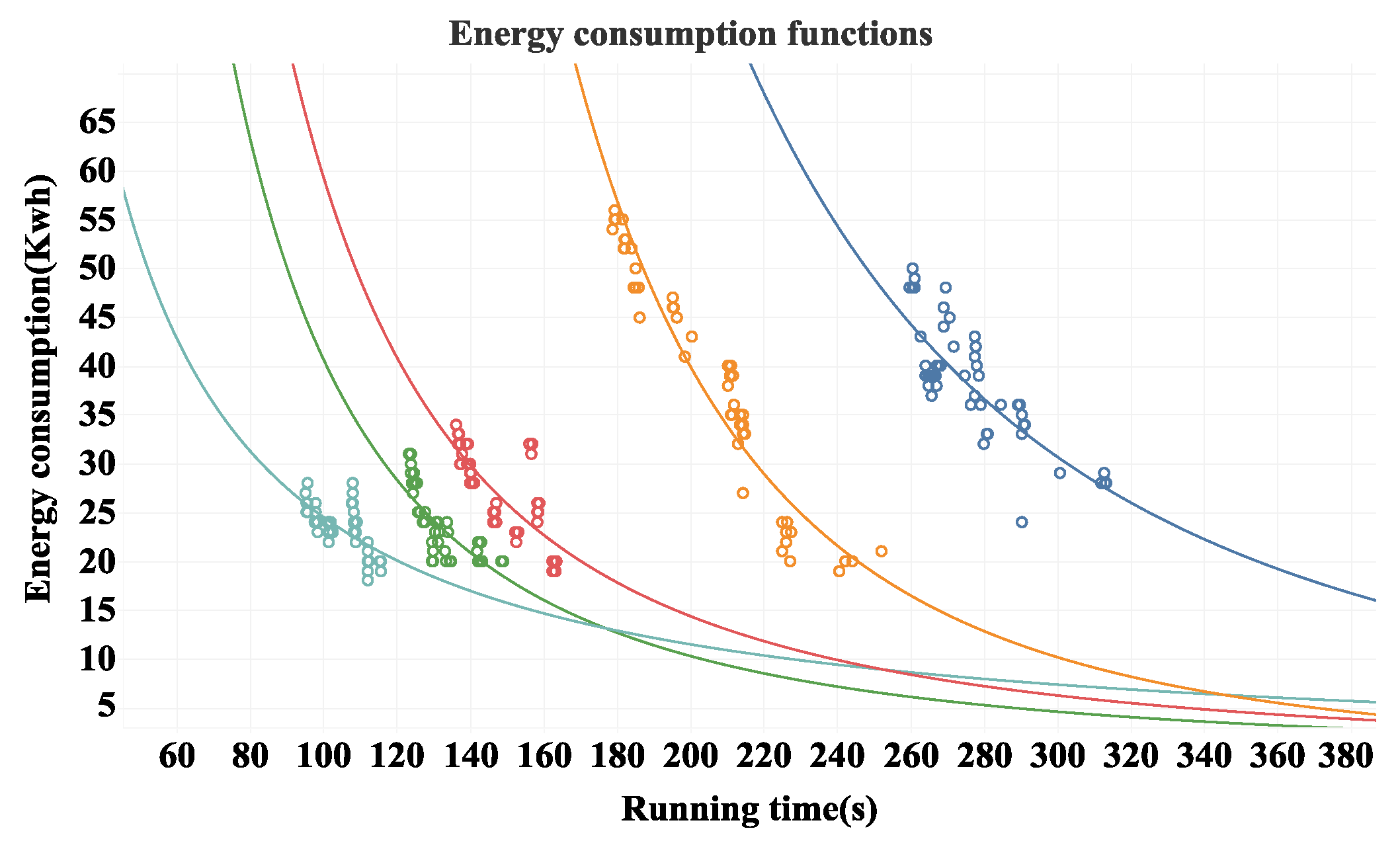
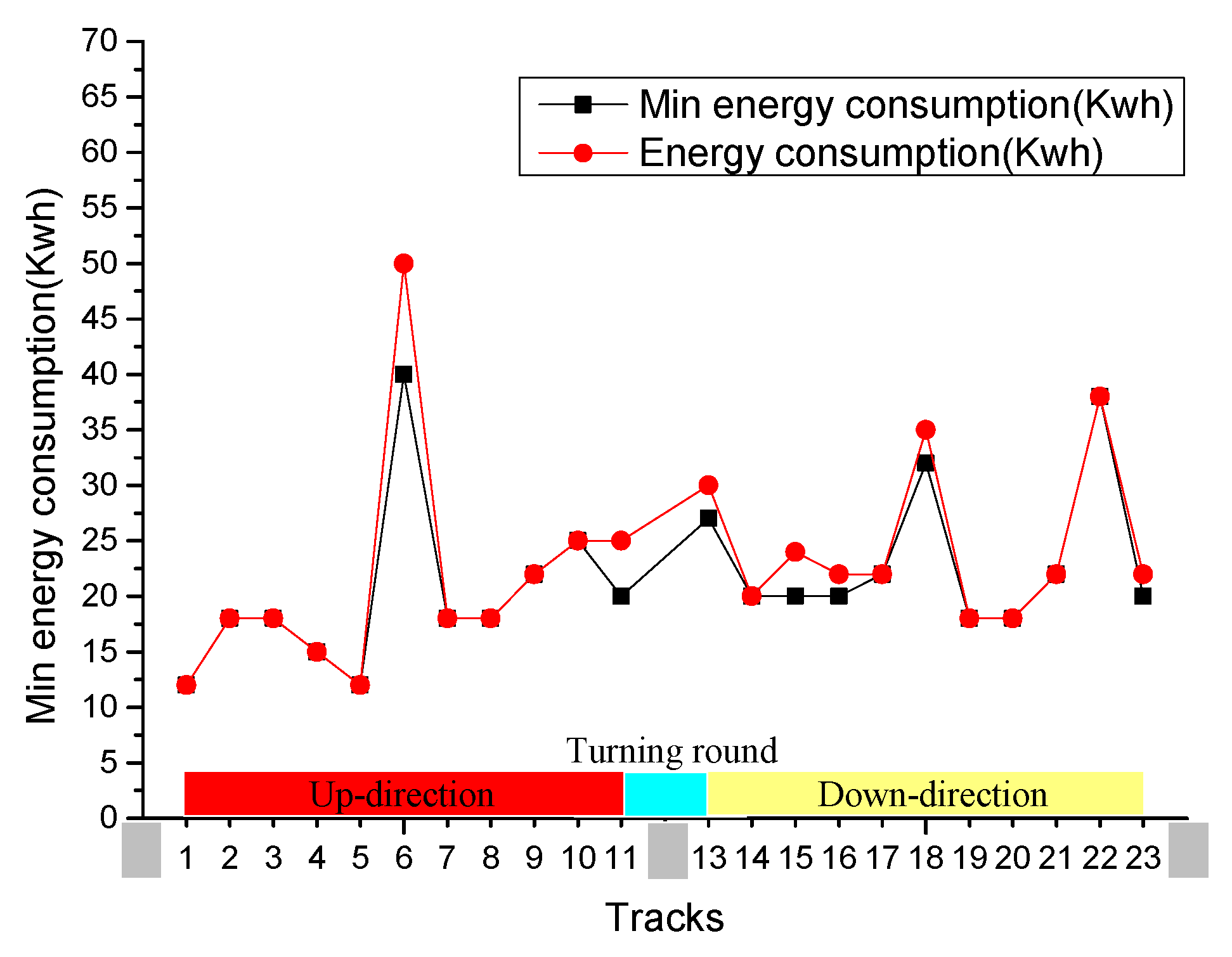
As shown in
Figure 3, there are real-world statistics for different sections (different colors and trend lines represent the energy consumption in different sections). It is easy to observe that the most energy-efficient timetable will be obtained under the minimum average speed (maximum allowed running time). However, this is a single train condition with no constraints. If the headway and passenger accommodation constraints are taken into account, then it would be more complicated. The minimum average speed can always be invalidated because of the pressure from the operational efficiency.
The energy consumed is a function of the average velocity (also the running time
) and train load
(train mass
and the total weight of passengers
on the track
t) in each track. Furthermore, the energy consumption in a cycle is the sum of each track
with the train running a whole circle on the bi-directional urban rail line. Therefore, it can be formulated as follows:
Therefore, the total energy consumed during the planning horizon,
E, including every train’s energy in the cycle, should be computed as follows:
We know that frequency f is associated with the train velocity since the faster a train runs, the higher the frequency is during the planning horizon, which also means higher energy consumption. However, if the frequency is too low, then the operational trains might fail to accommodate all passengers.
3.3. The Timetable Specification
OD: passenger demands in the form of the origin-destination (o-d) matrix:
There are two conditions. In the upward direction, , corresponds to the passenger volume from platforms i to j. Otherwise, for , is the passenger volume from platform to .
Thus, in the planning horizon (1 h in this paper), the boarding and alighting passengers can be calculated as follows:
Firstly, the passengers boarding at platforms p can be computed as follows:
For platforms
N and
, there are no passengers boarding the train. Therefore:
Similarly, the passengers alighting at platform p can be computed as follows:
For Platforms 1 and
, there are no passengers alighting from the train. Therefore:
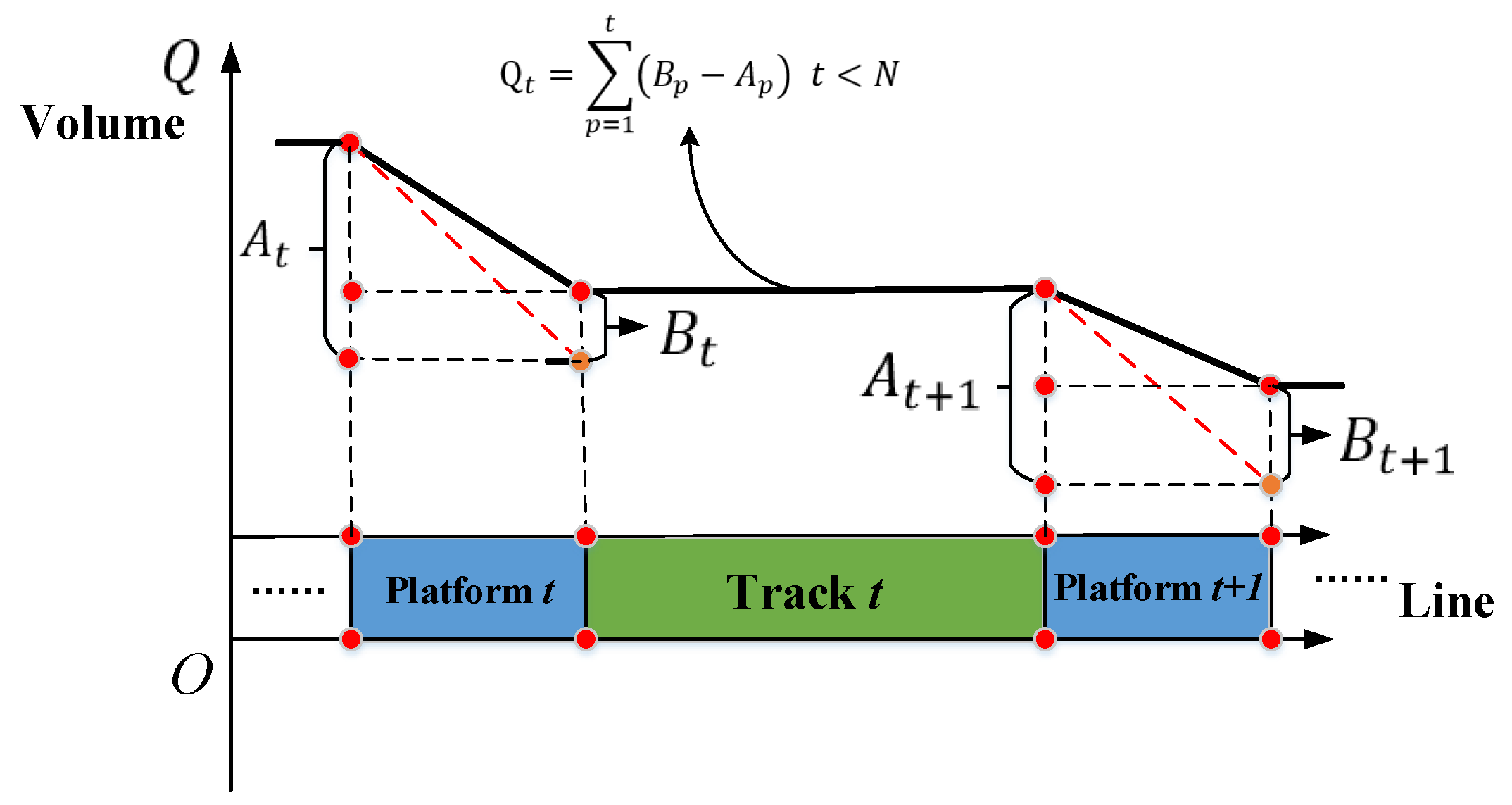
As for passenger volume in each track
t, it can be computed through the accumulative process in linking platforms
t to
. For instance, in the upward direction (
), as shown in
Figure 4, the passenger volume in track
t is
.
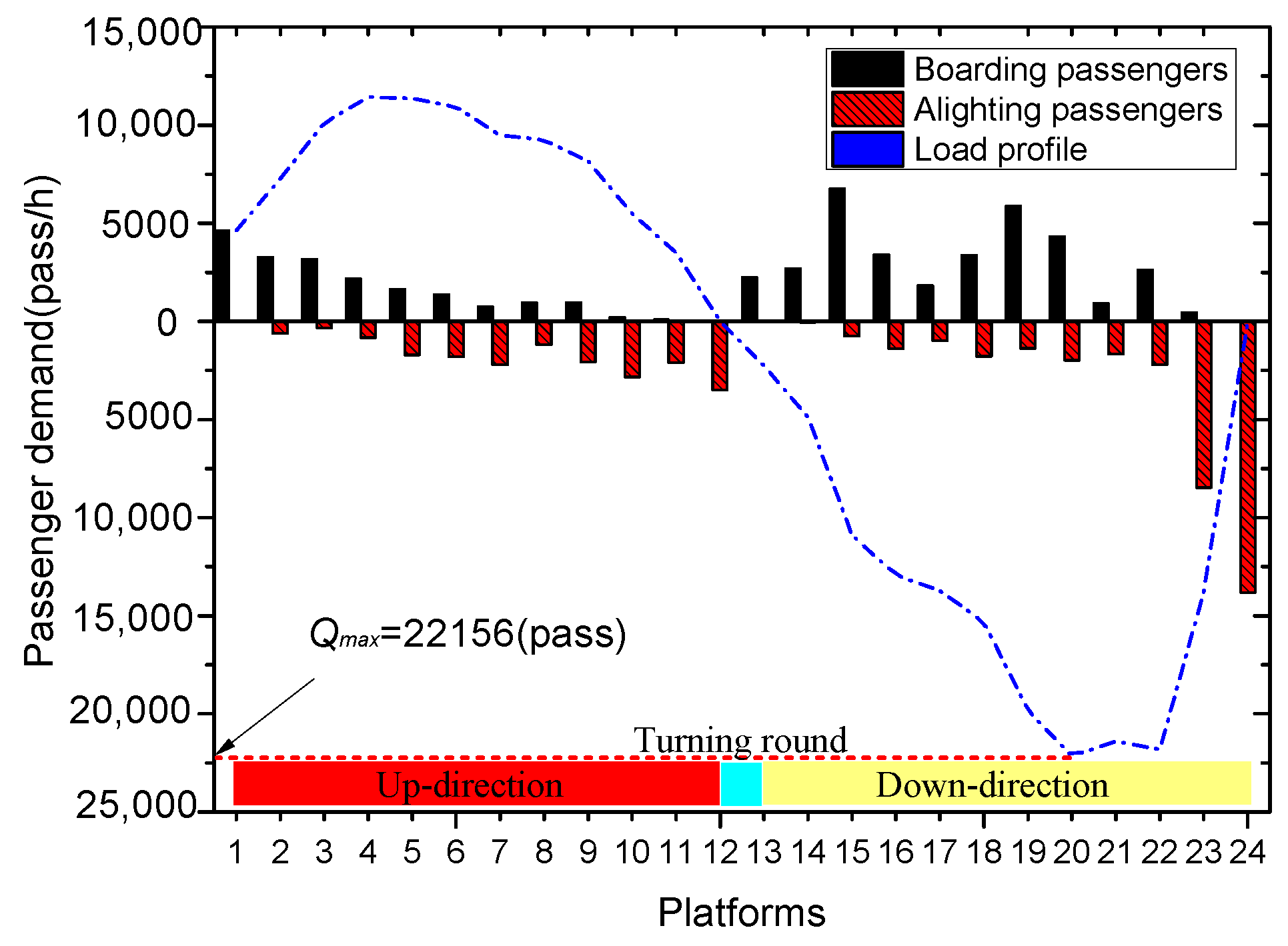
Therefore, the passenger volumes in both directions are:
The largest passenger track can be found, and the maximum number of passengers in the tracks is:
is an essential parameter for accommodating the passenger demand. Furthermore, it is a constraint on transport capacity.
Assuming that the passengers arrive uniformly, the average passengers boarding and alighting the trains are applied in the model. A planning horizon of 1 h (3600 s) was taken into account in this study. Average boarding and alighting rates are (measured as passengers per second):
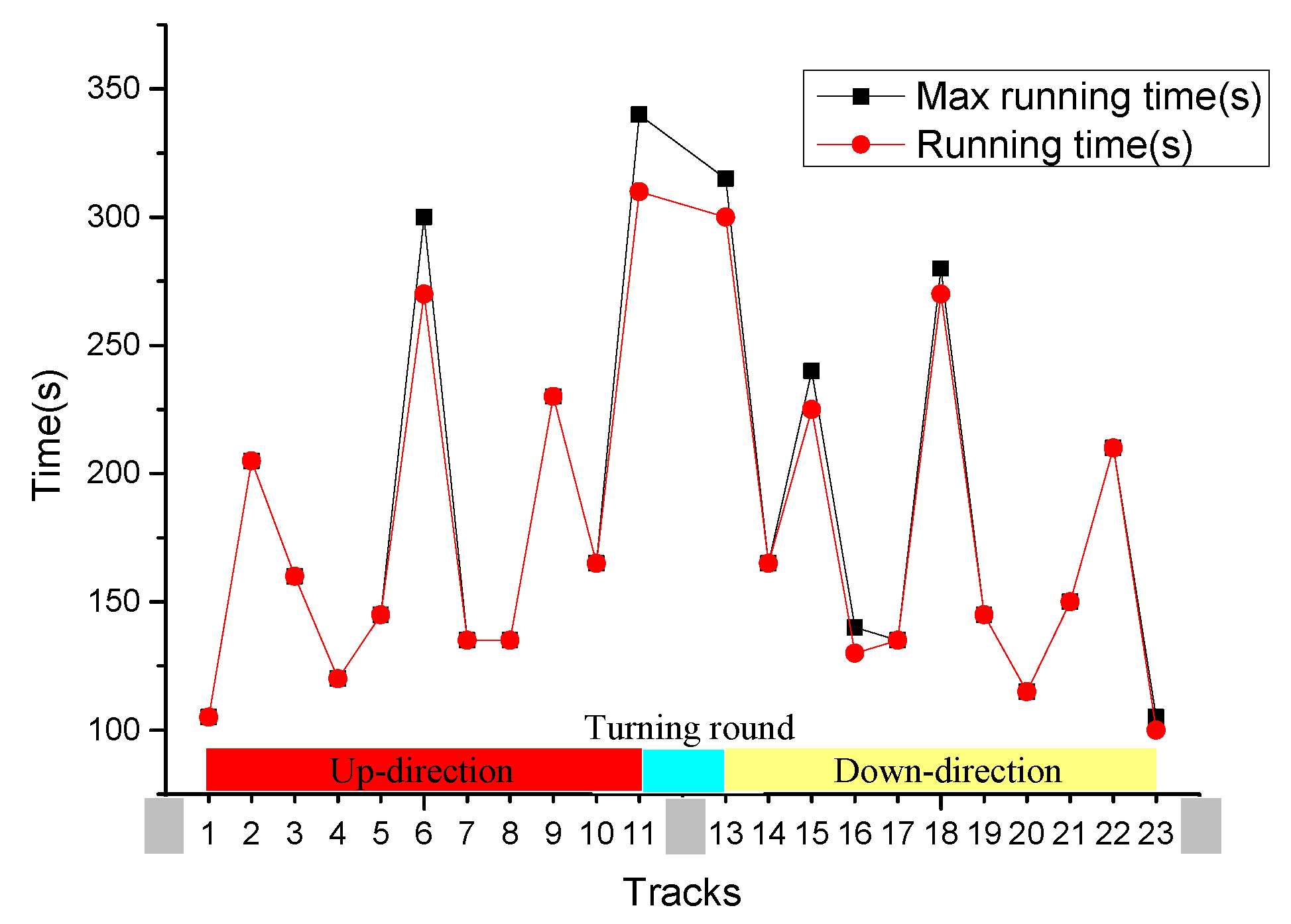
The running time on track
t begins at the departure time at platform
t and ends at the arrival time at platform
. Therefore:
Furthermore, there are always velocity limitations in the running sections for safety and geographical reasons. Therefore, there are bounded constraints on the running time of sections:
Similarly, the dwell time,
, begins at the arrival time at platform
p and ends at the departure time of platform
p. Therefore:
In addition, there are constraints on the boarding and alighting of passengers during the dwelling process. Furthermore,
denotes the empirical alighting, while
denotes the boarding rates. Both are measured as seconds per passenger, which are determined by the width and number of train doors. Furthermore, the alighting time
and boarding time
at platform
p can be computed as follows:
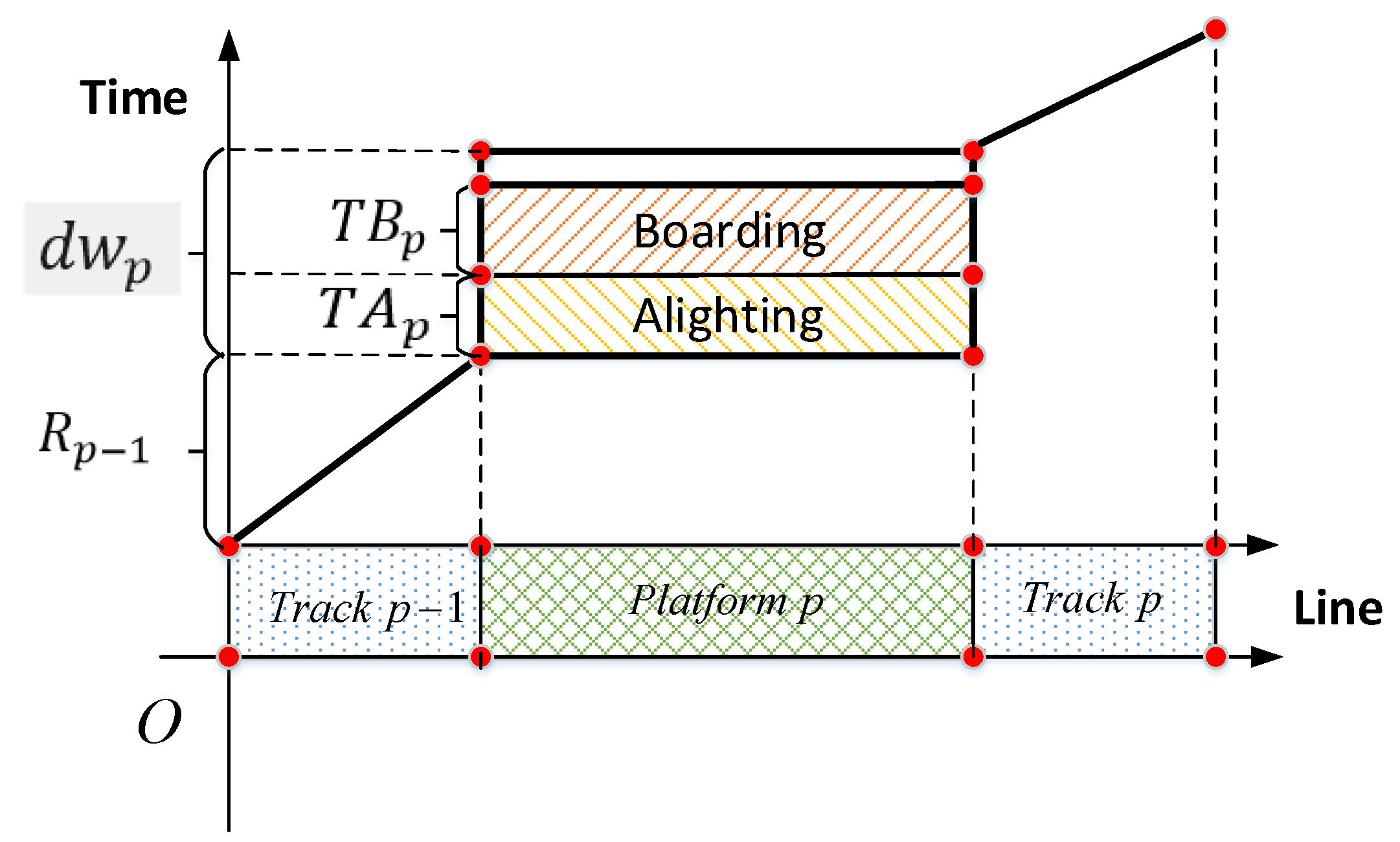
The dwell time must be long enough to complete the alighting and boarding processes (as shown in
Figure 5). Therefore, the dwell time should cover the alighting time and boarding time:
, which are arranged as:
There are always bounded values for headway. On the one hand, the minimum headway is determined by the signaling system and safety considerations. On the other hand, the maximum value is usually restricted to the service level or government tasks. Therefore:
The departure frequency
f, which represents the train quantity in the line during the planning horizon, is associated with the headway by:
To ensure the frequency is an integer,
h must be a divisor of 3600. In this case, as in Canca et al. (2016) [
4], there are alternative headway values, for instance 120, 180, 240, 300, 360, 600, 720, 900, 1200, and 1800 s.
To avoid train pileups, the dwell time at each platform cannot be greater than the headway:
Furthermore, to maintain the order of the passengers on the platforms for safety purposes, there is bounded dwell time:
The cycle time
C, which is the time consumed by a train in running a loop in the bi-directional line, can be computed as:
where
denotes the turning back time. There is always a technical standard for the turn back time under the turn back facilities and signal system. Furthermore, the headway is associated with the fleet size
F, which is a relationship in:
Then, by replacing the headway
h with
, the fleet size can be calculated as:
We can see that if cycle time s, then . If cycle time s (there may be short lines for a short cycle), then .
The train quantity is also limited by consideration of the fixed investment. Therefore, the fleet size cannot be greater than the maximum train quantity:
For a fixed train unit, there is a corresponding capacity
due to the consideration of the limited room and passenger comfort. To guarantee that all passenger demands (all
demands) are satisfied with the maximum capacity, frequency
f should satisfy the constraint as follows:
The constraints (
23) can be another form by replacing the
f by relation
, then:
Therefore, if the train capacity is fixed after determining the train units, then the carrying quantity in one hour is . Additionally, with the increase in , the headway should be shorter.
Finally, if the average passenger weight is
, the average train passenger load
on track
t for a train in the planning horizon can be calculated as:
3.4. First MINLP Formulation
Therefore, the model is a Mixed Integer Non-Linear (MINLP) problem. Moreover, non-linearities include the objective function E and the constraints (†) and (‡). Since we are in pursuit of the exact solution and a global optimum, we will linearize them in the following section.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}