Effect of Platform Motion on Aerodynamic Performance and Aeroelastic Behavior of Floating Offshore Wind Turbine Blades

Abstract
:1. Introduction
2. Numerical Methods
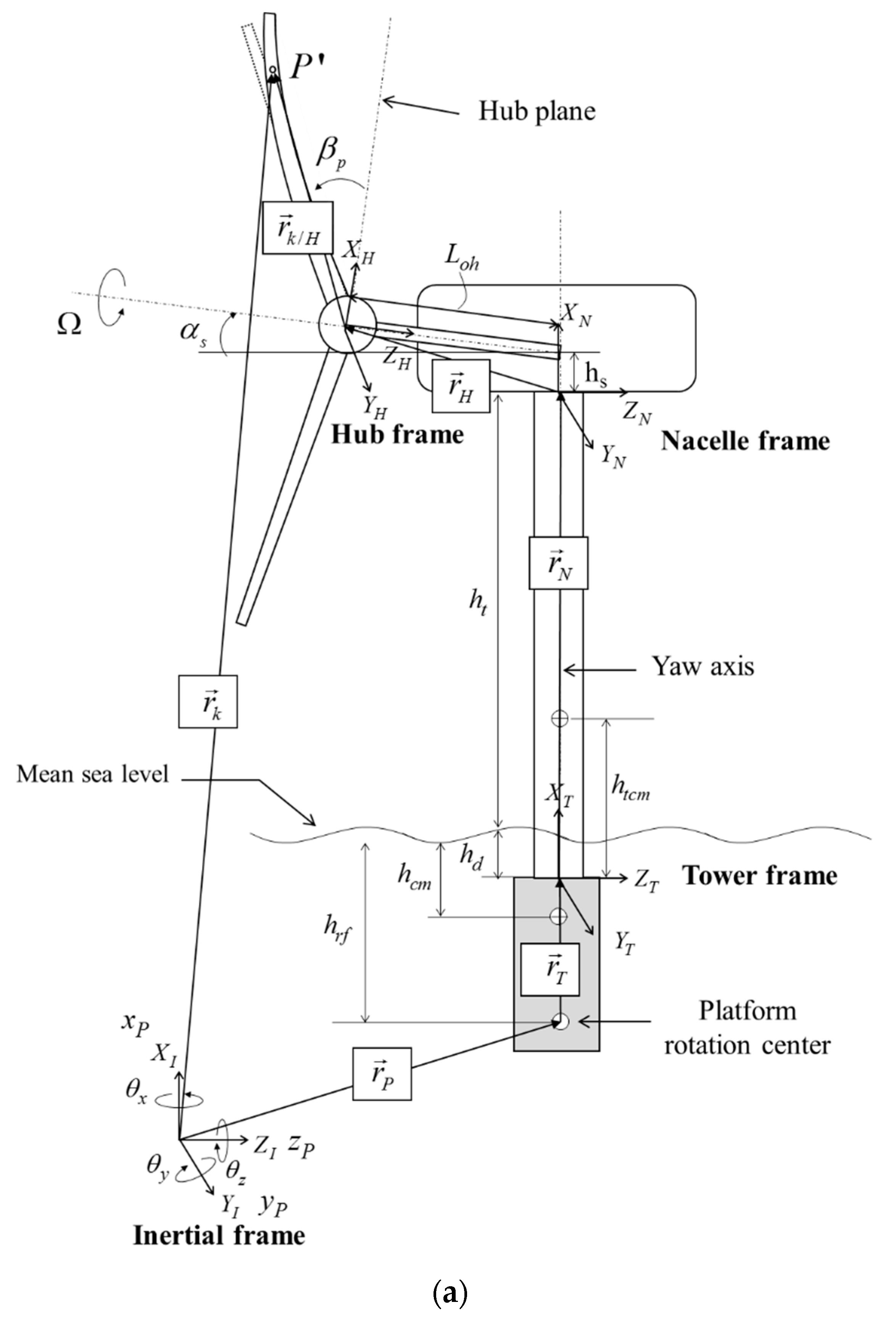
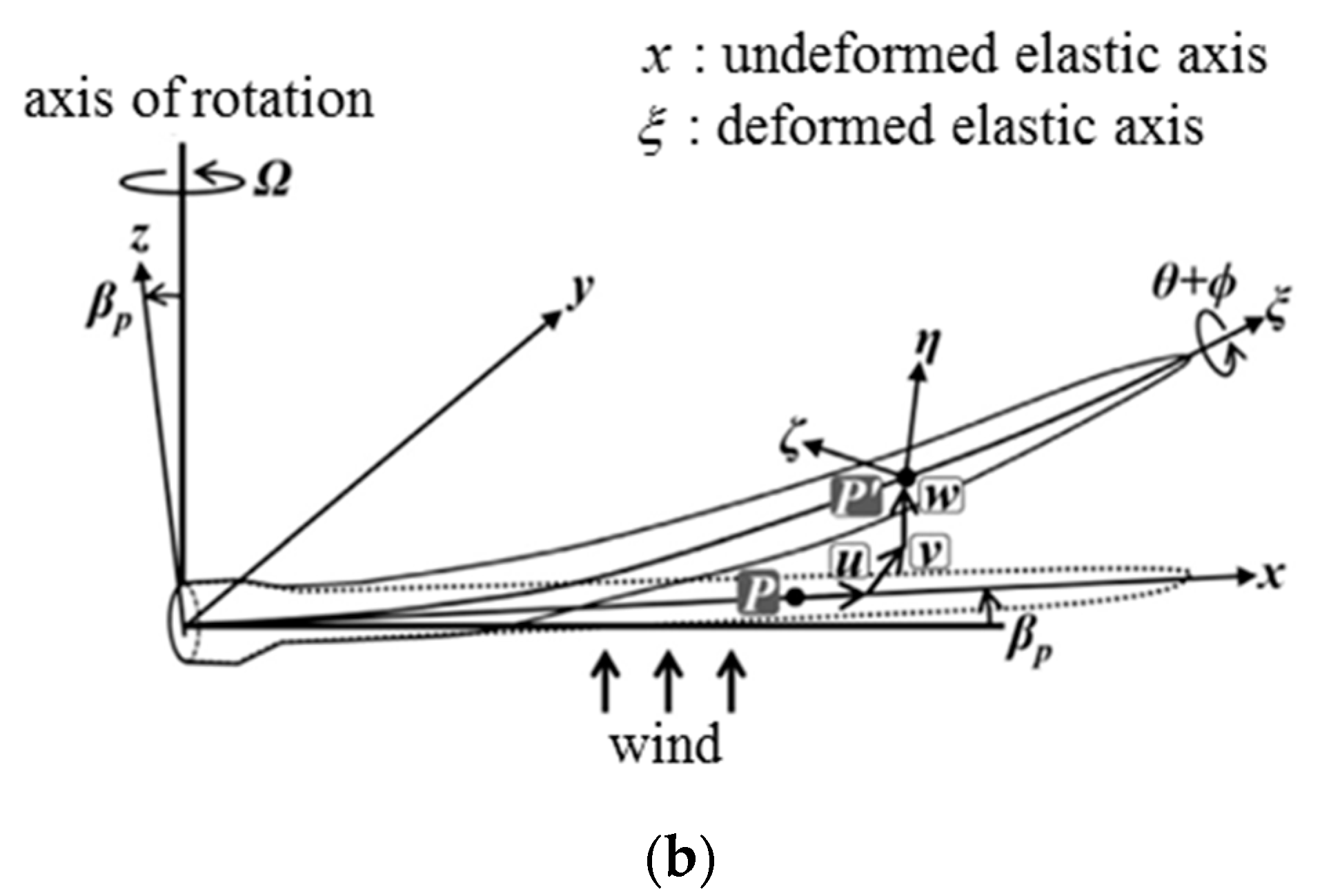
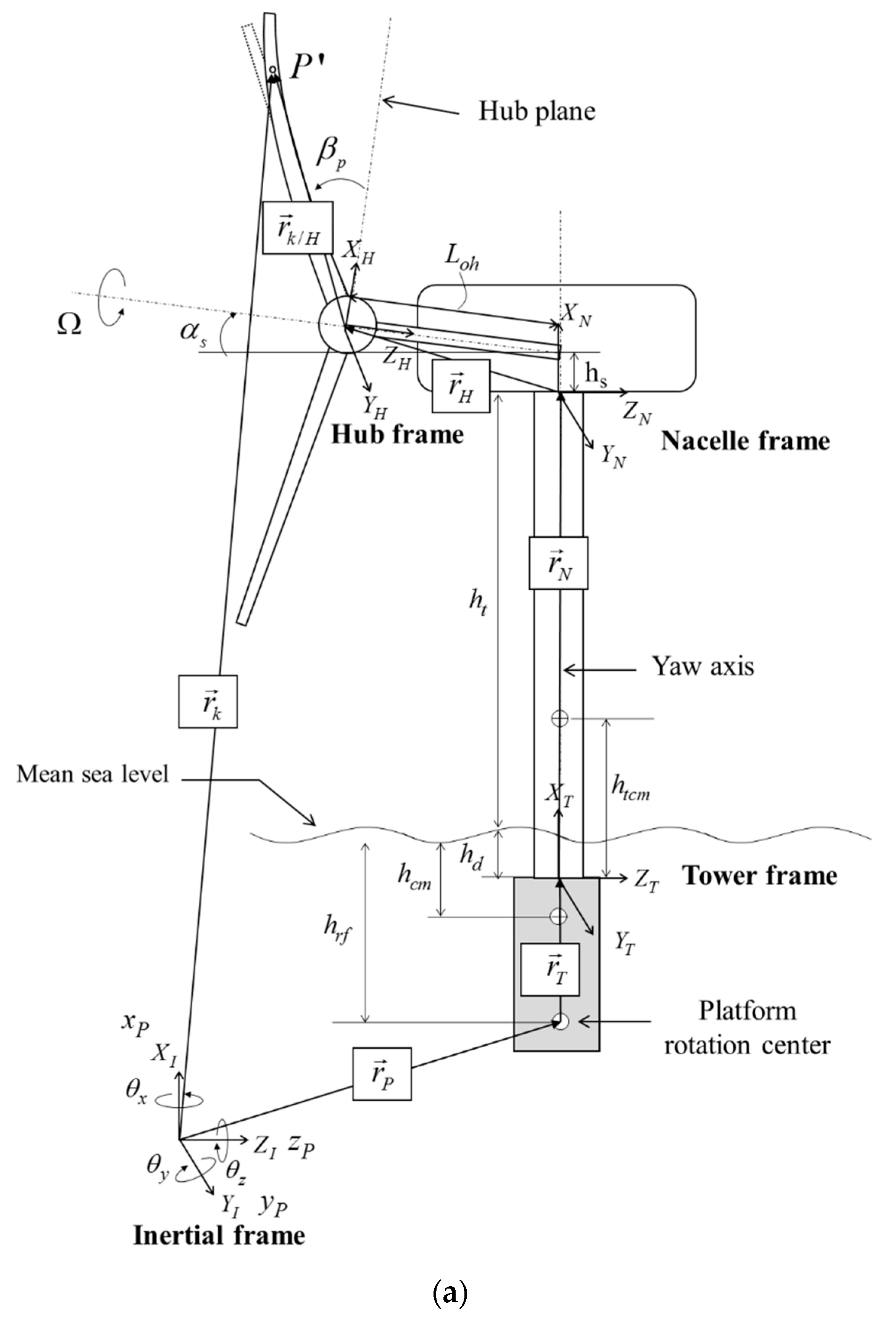
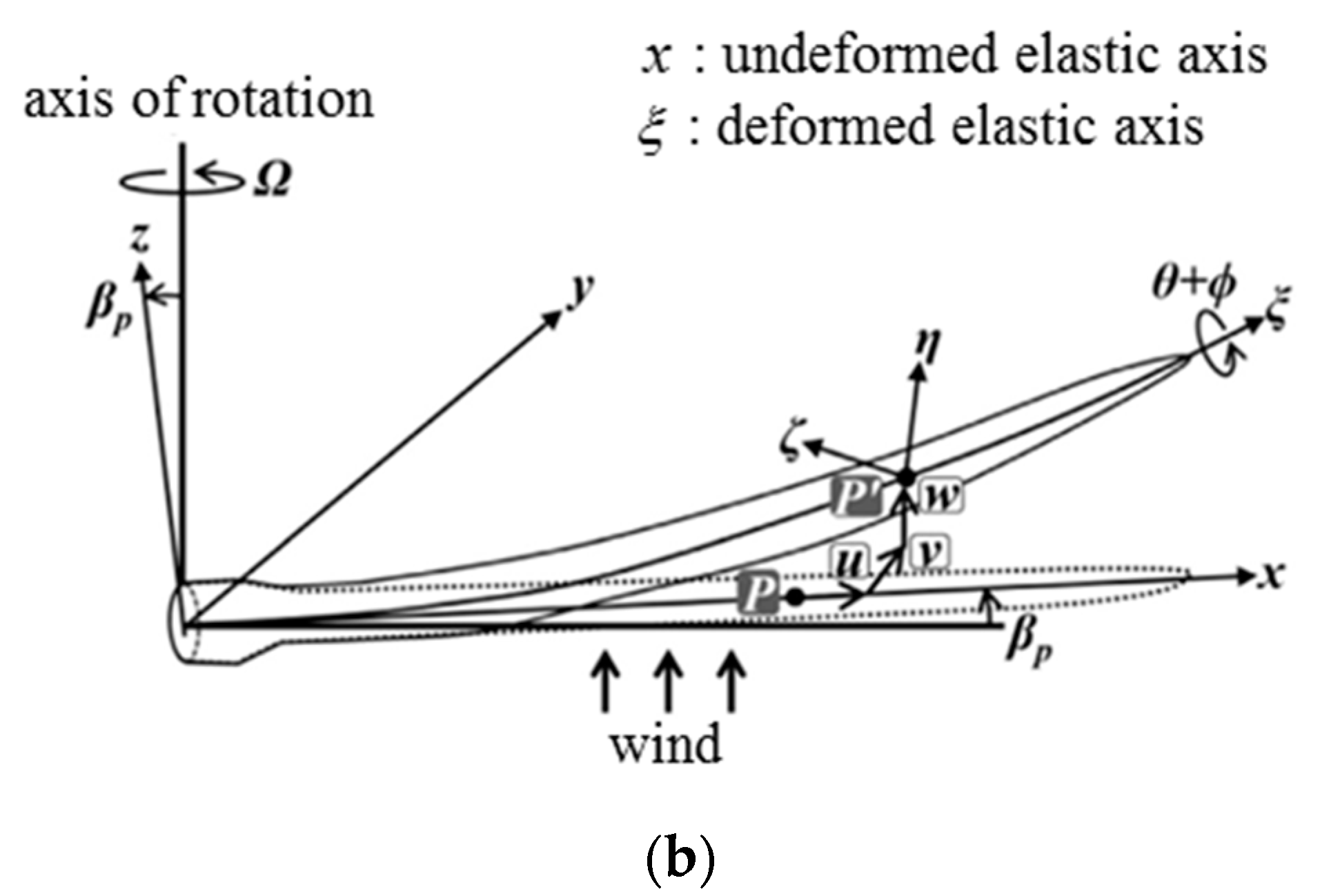
2.1. Derivation of Structural Equations of Motion
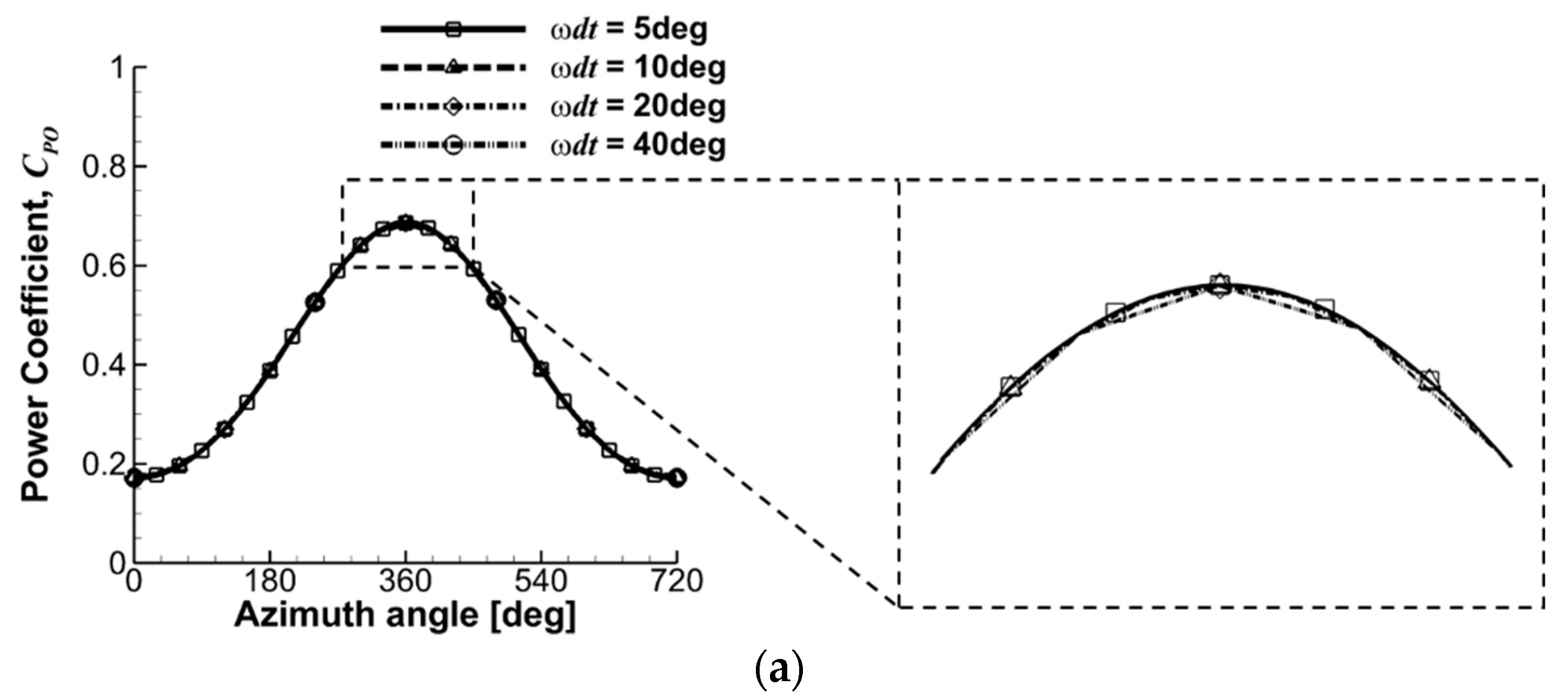
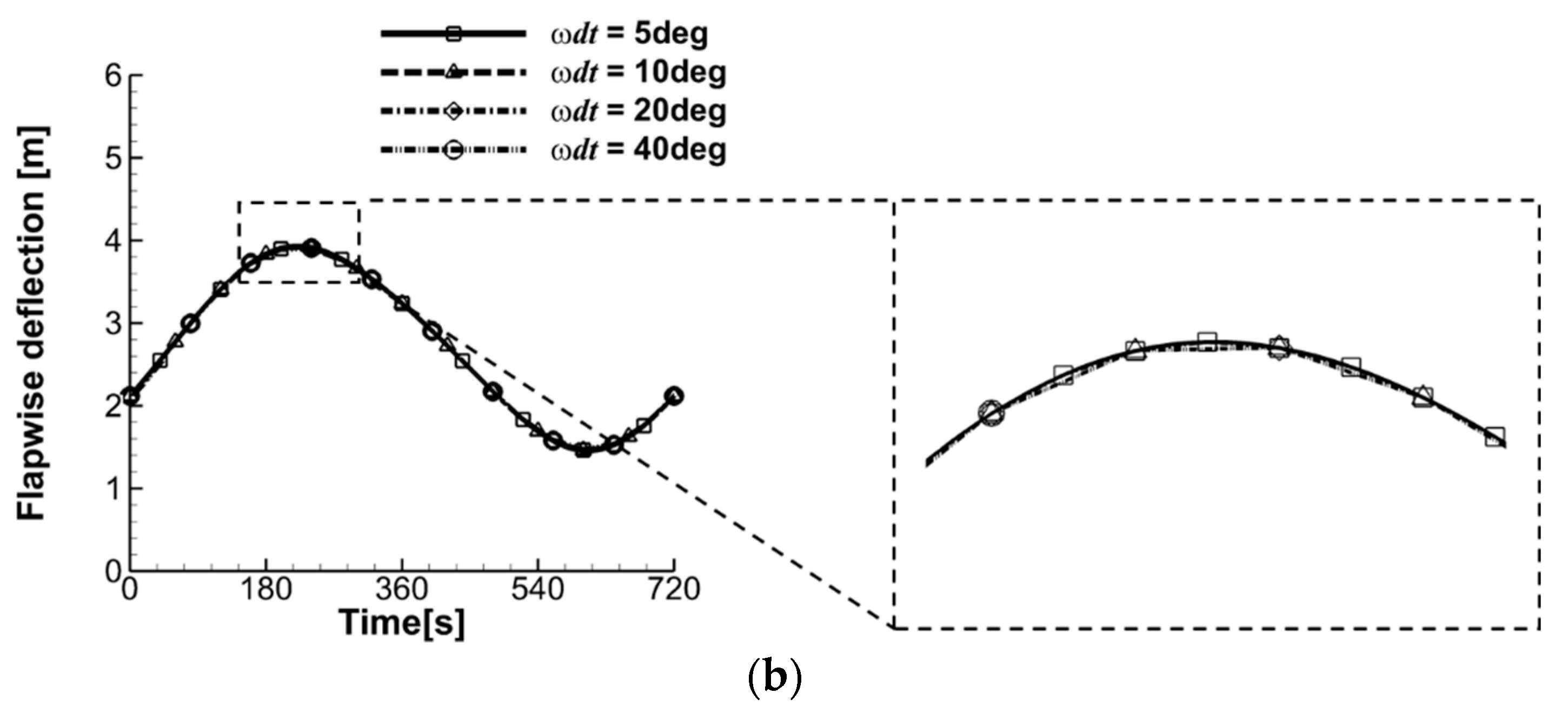
2.2. Discretization Method
2.3. Aerodynamic Load Prediction
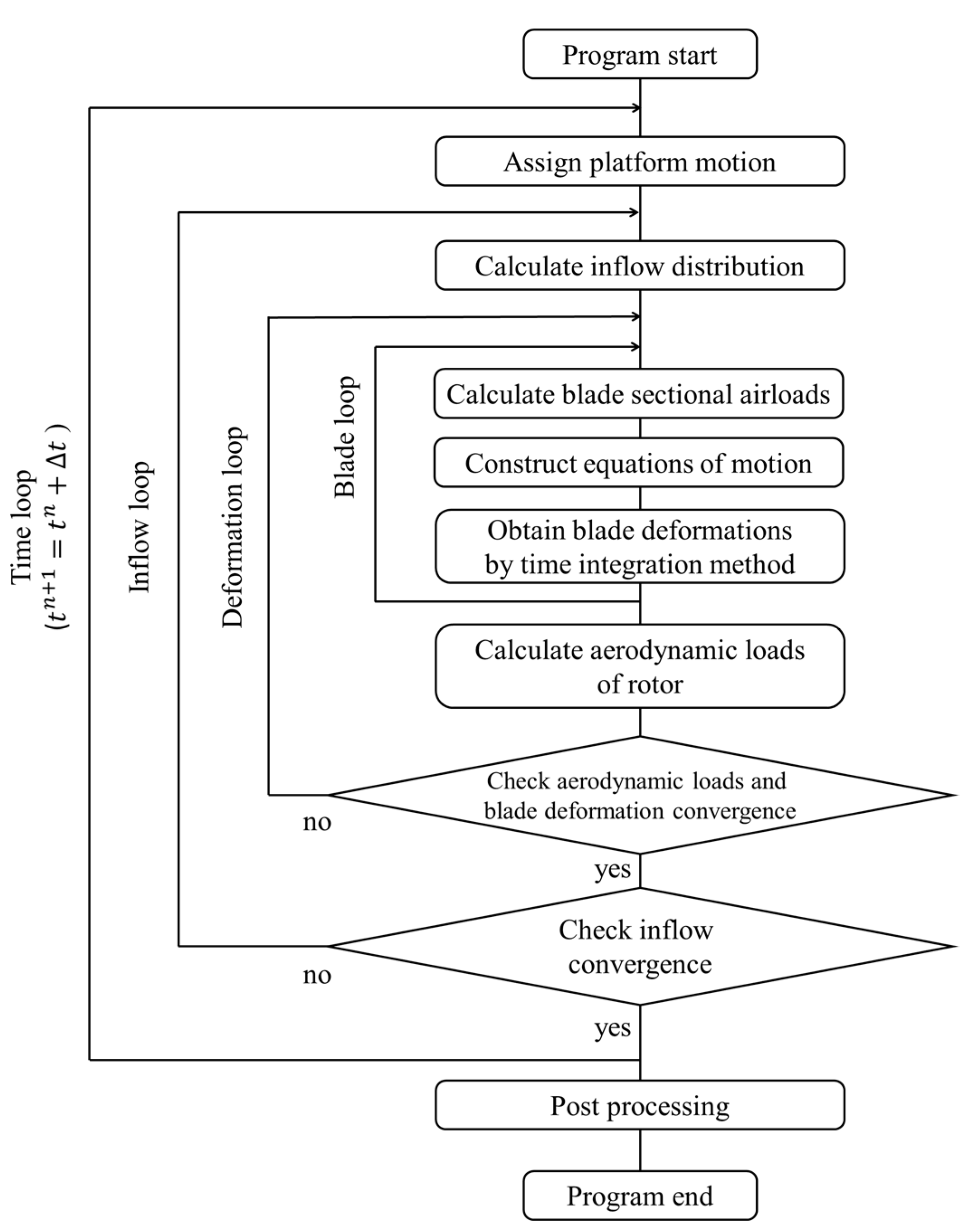
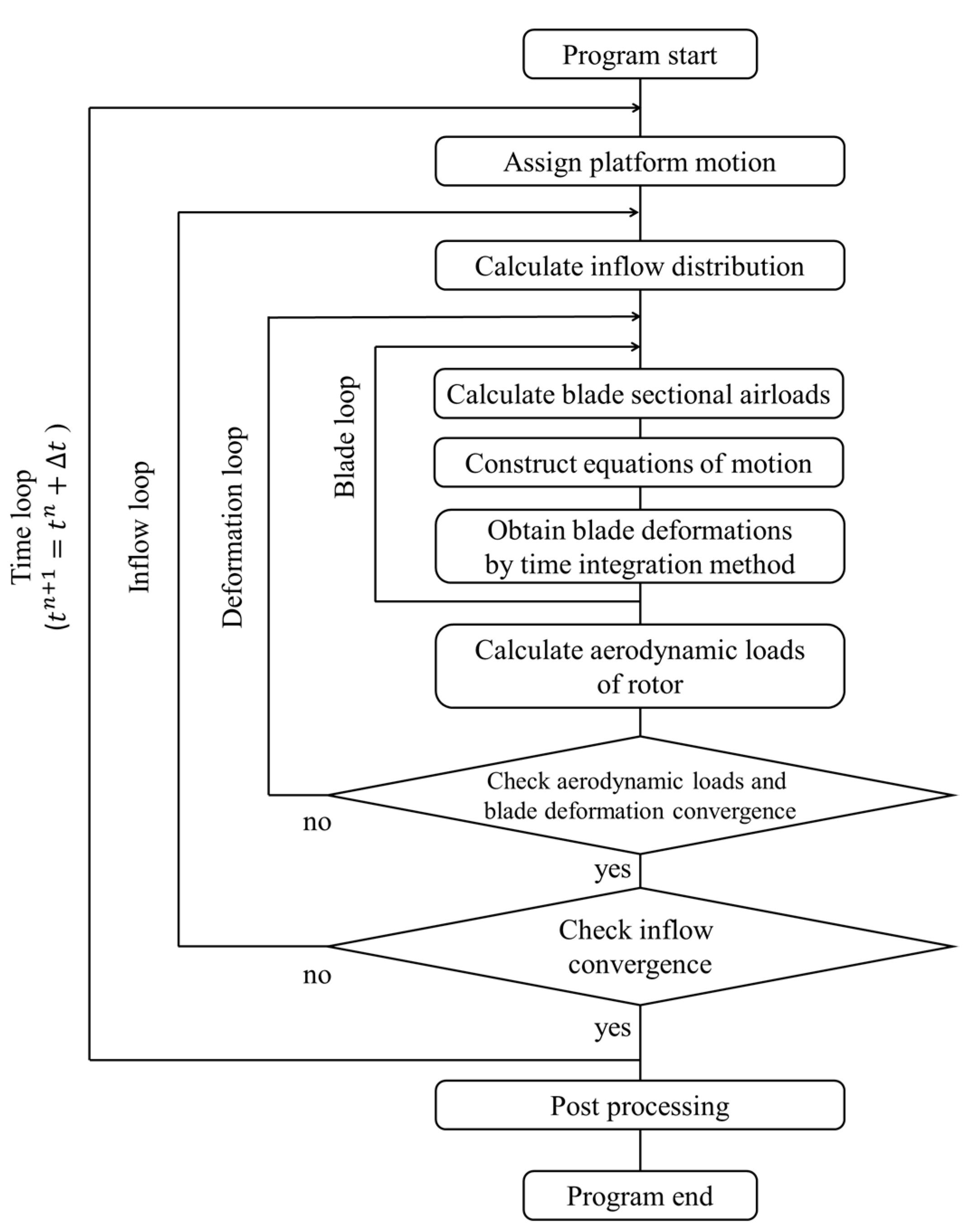
2.4. Coupling Methodology
3. Results and Discussion
3.1. Aeroelastic Analyses of Bottom-Fixed Wind Turbine Rotor Blades
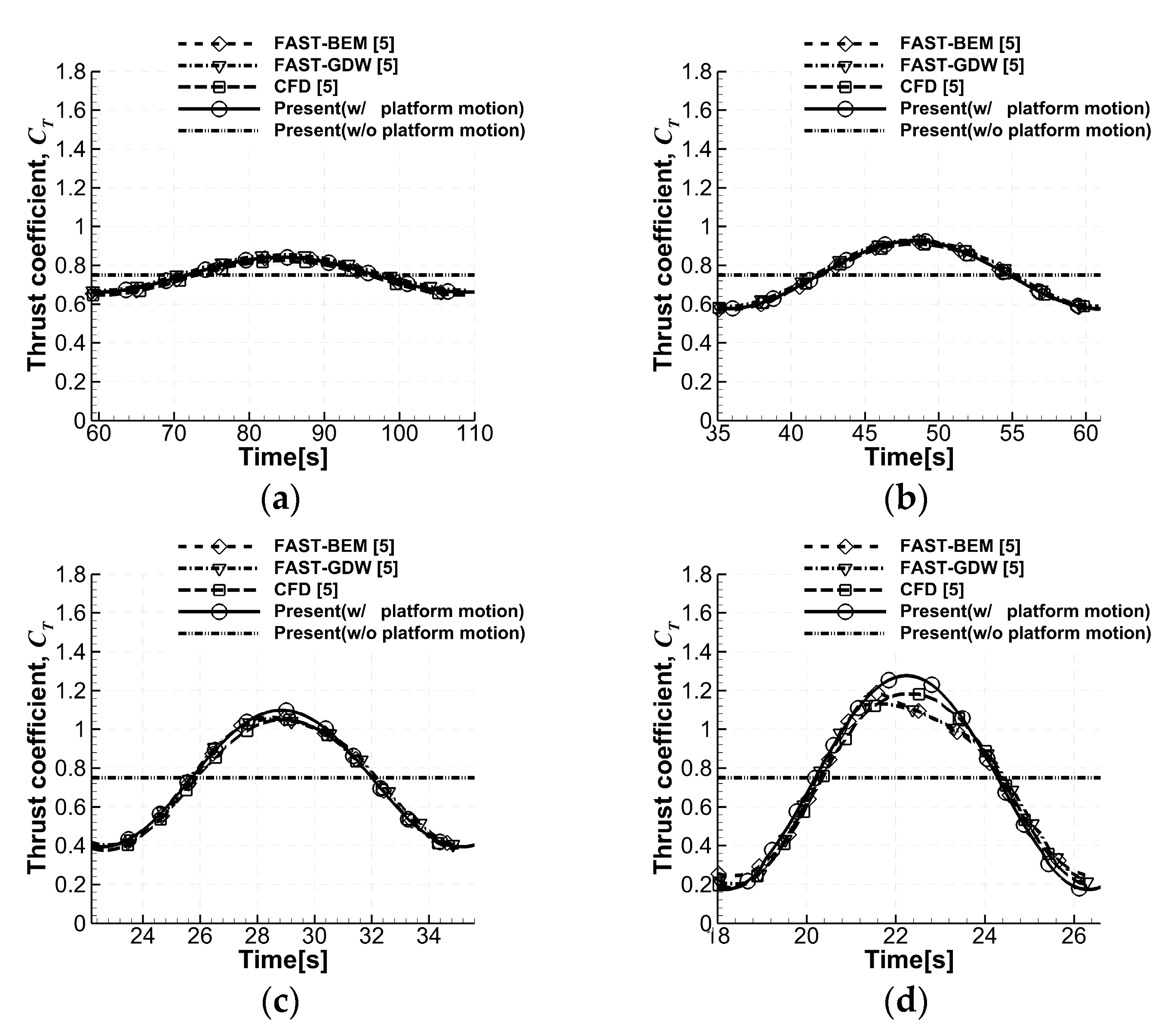
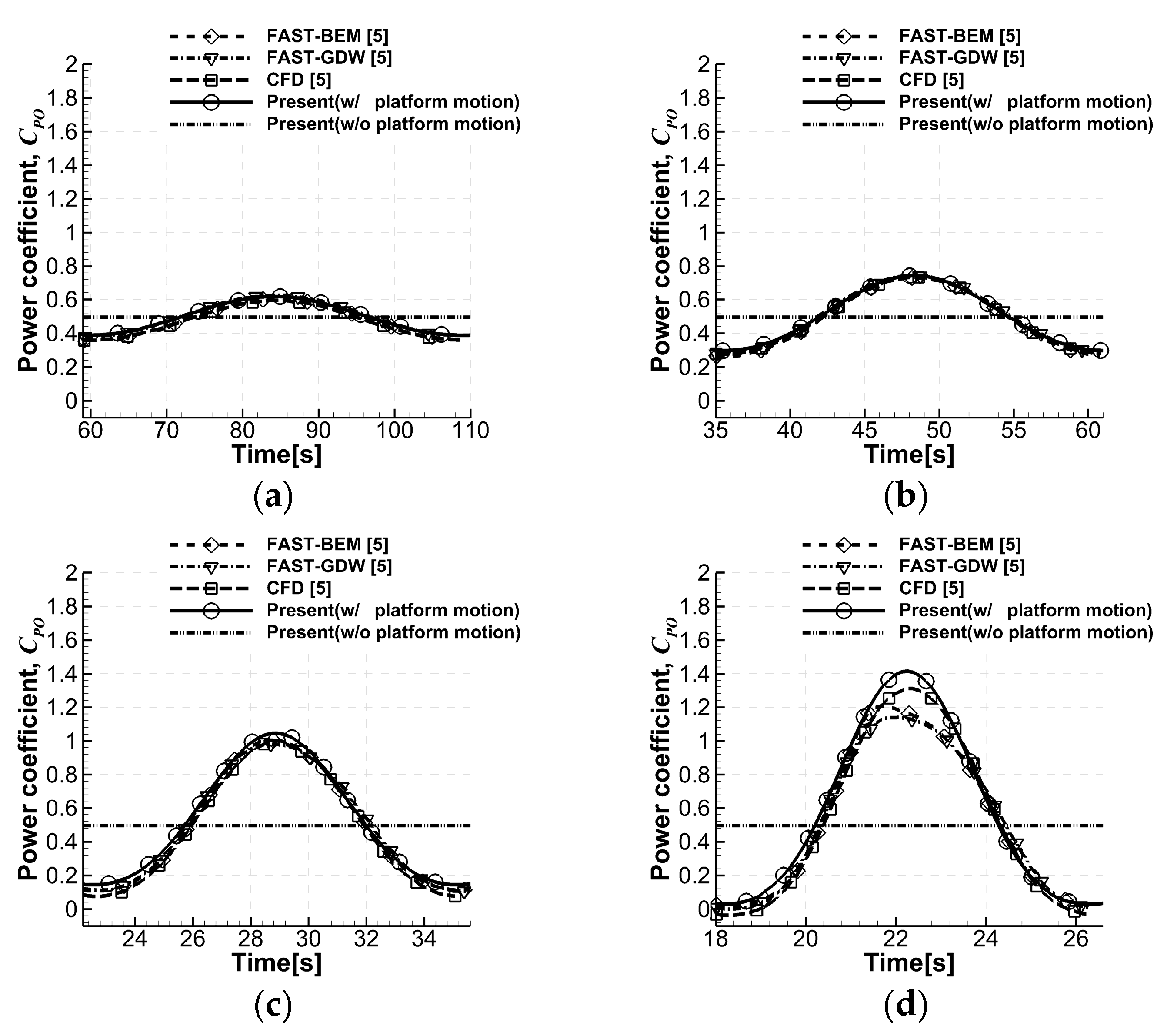
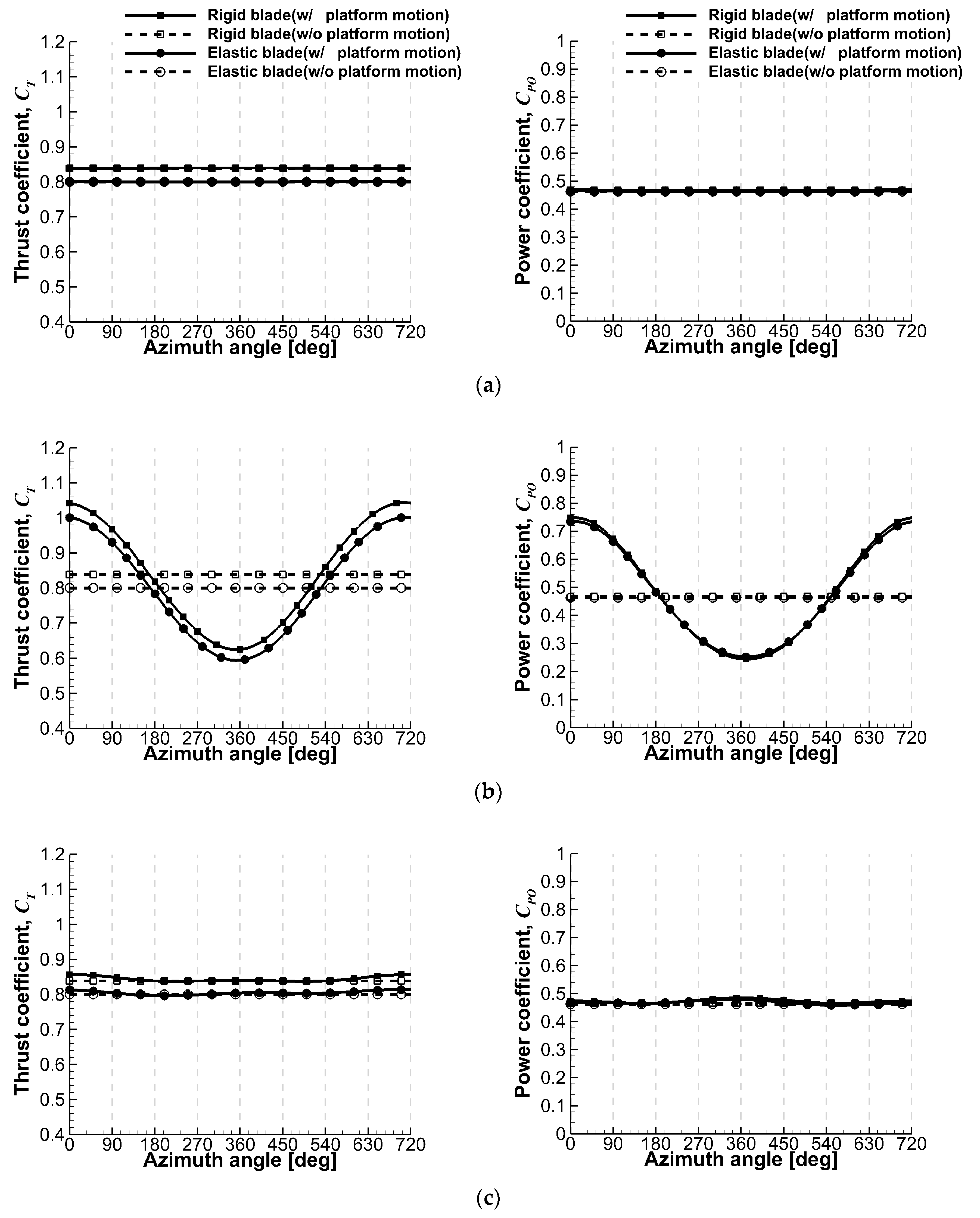
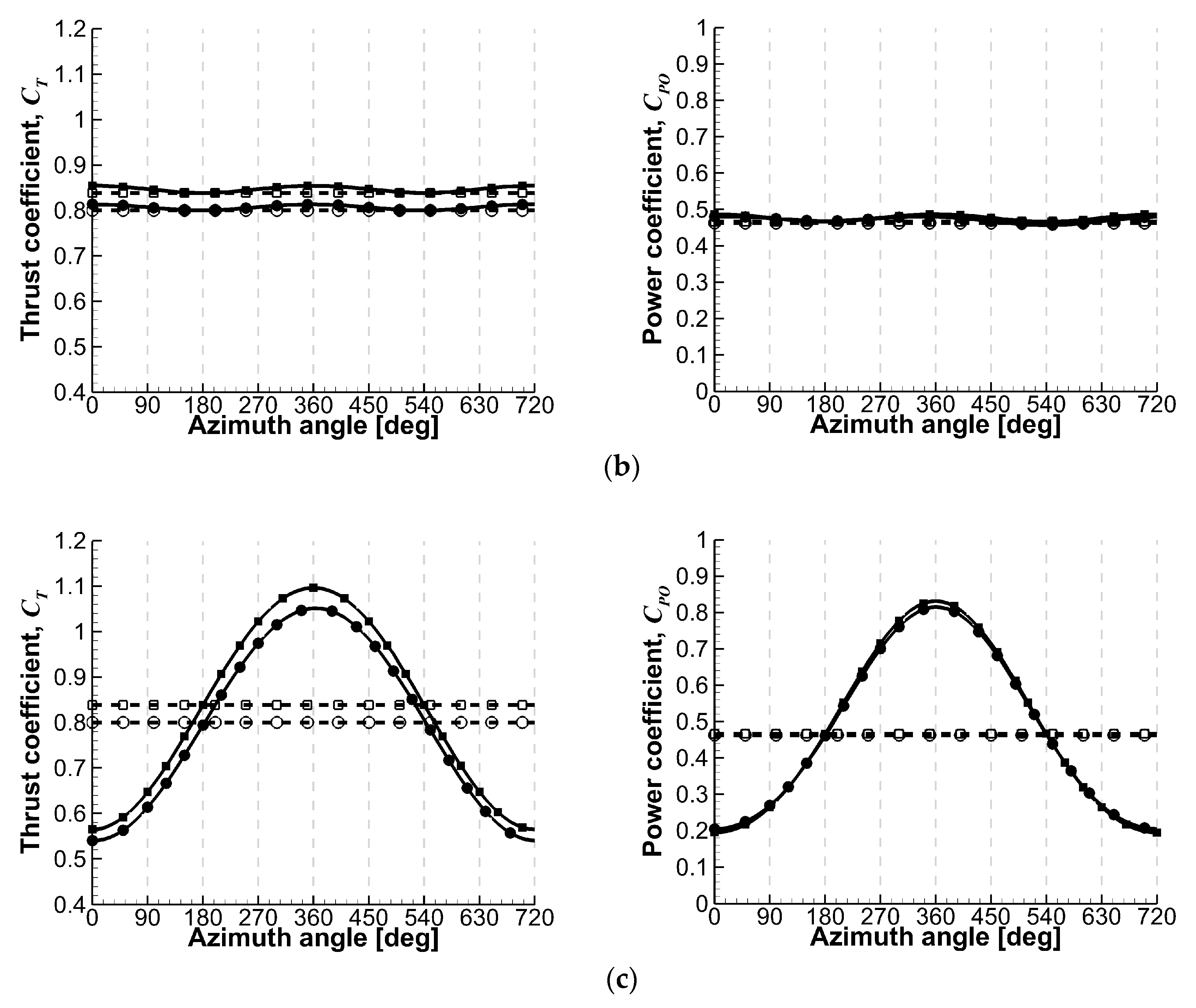
3.2. Aerodynamic Loads of a Floating Offshore Wind Turbine with Rigid Rotor Blades
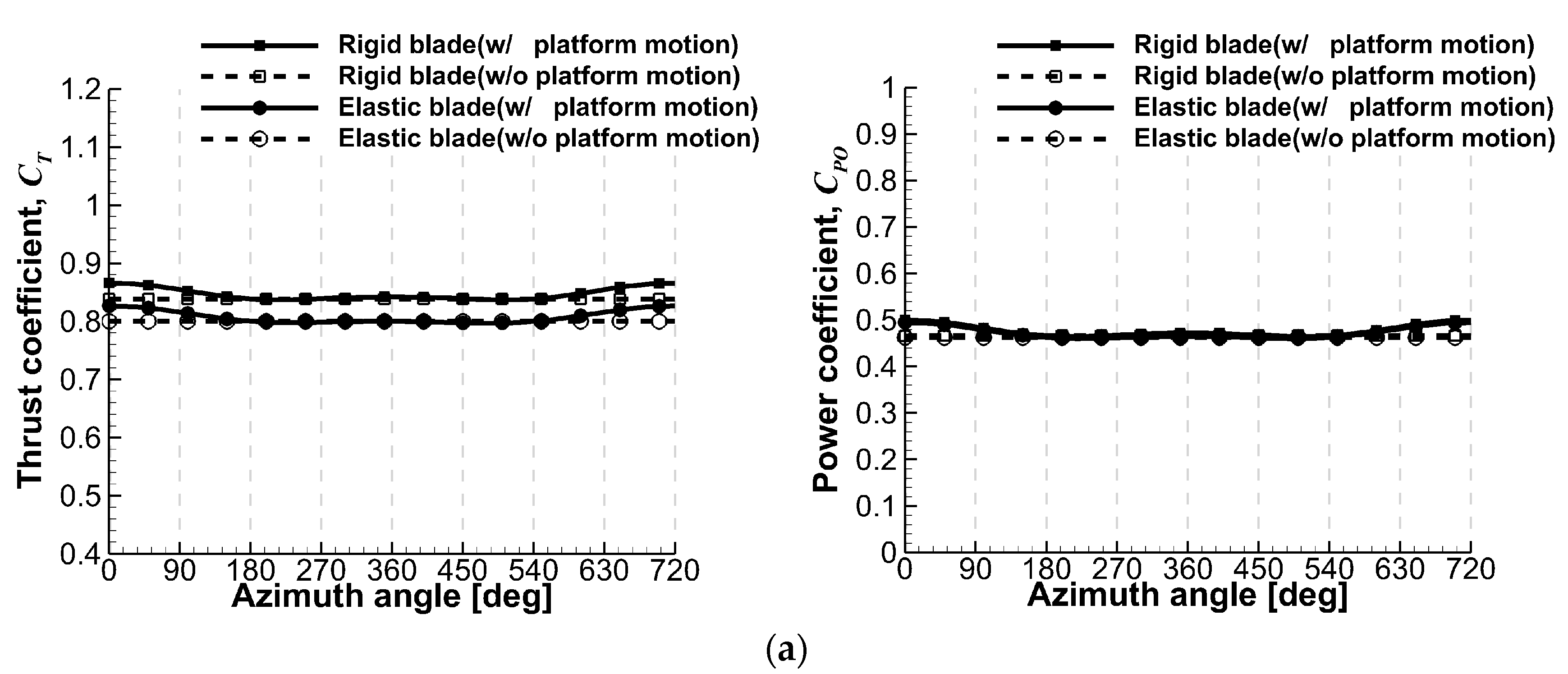
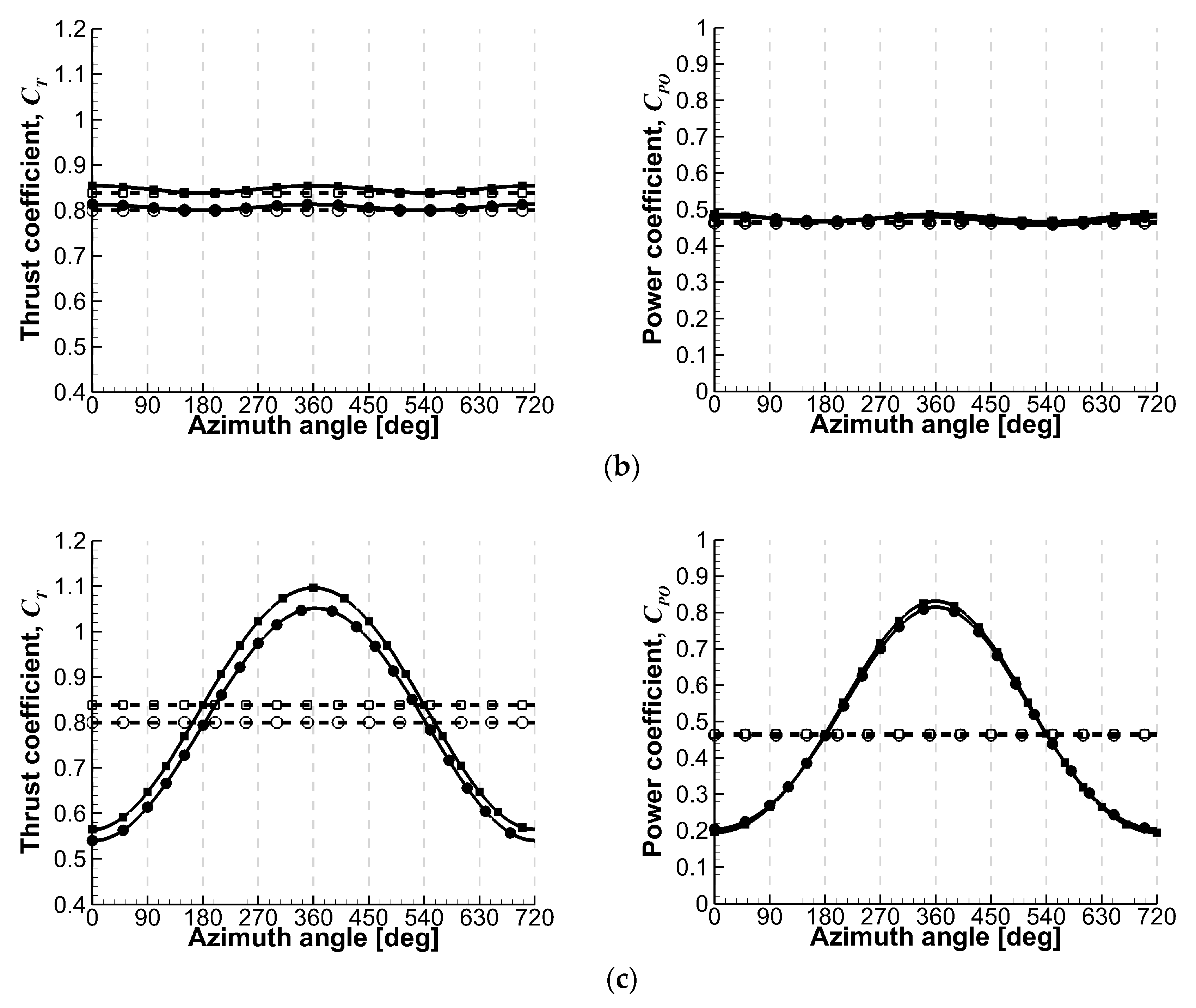
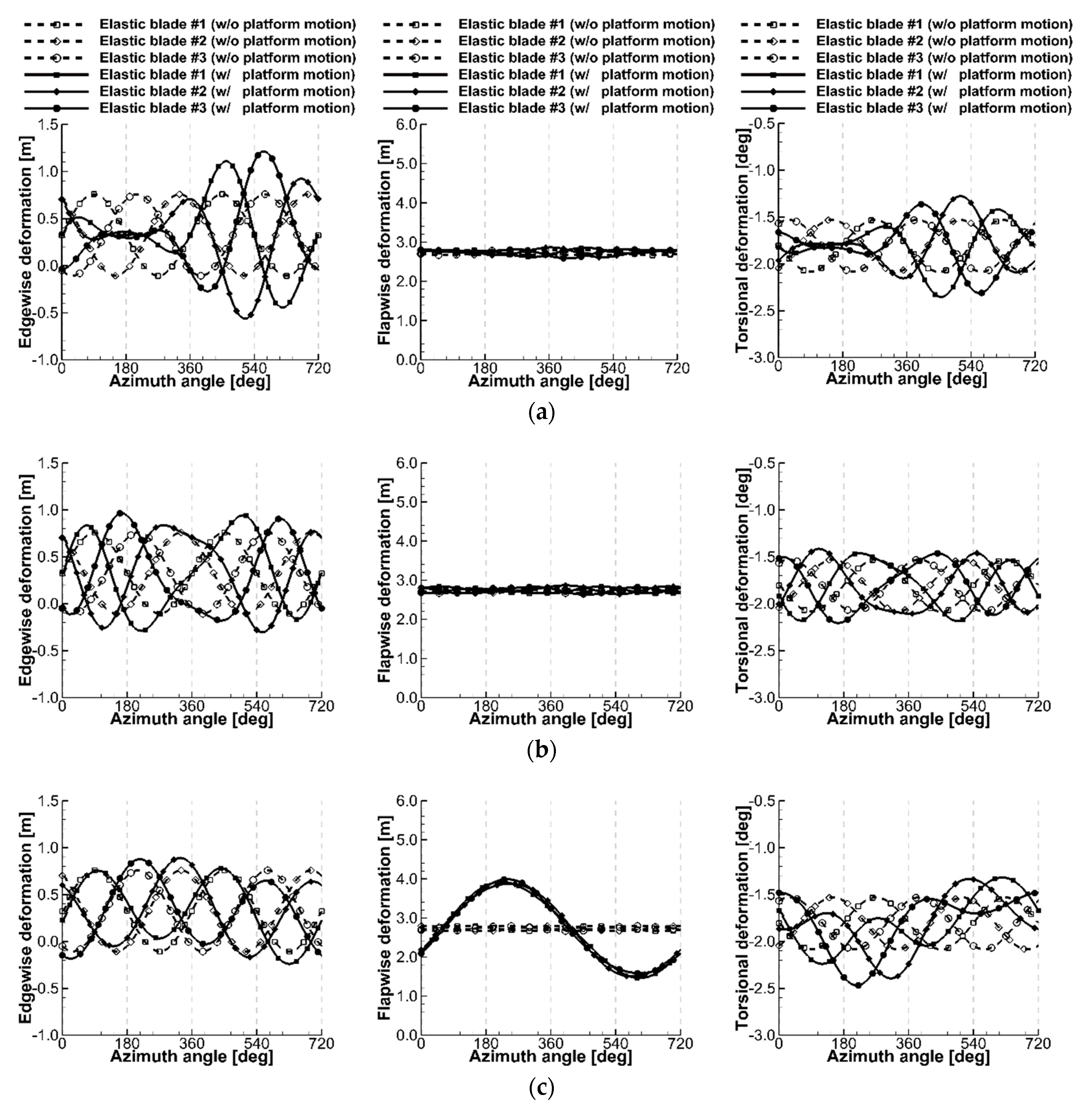
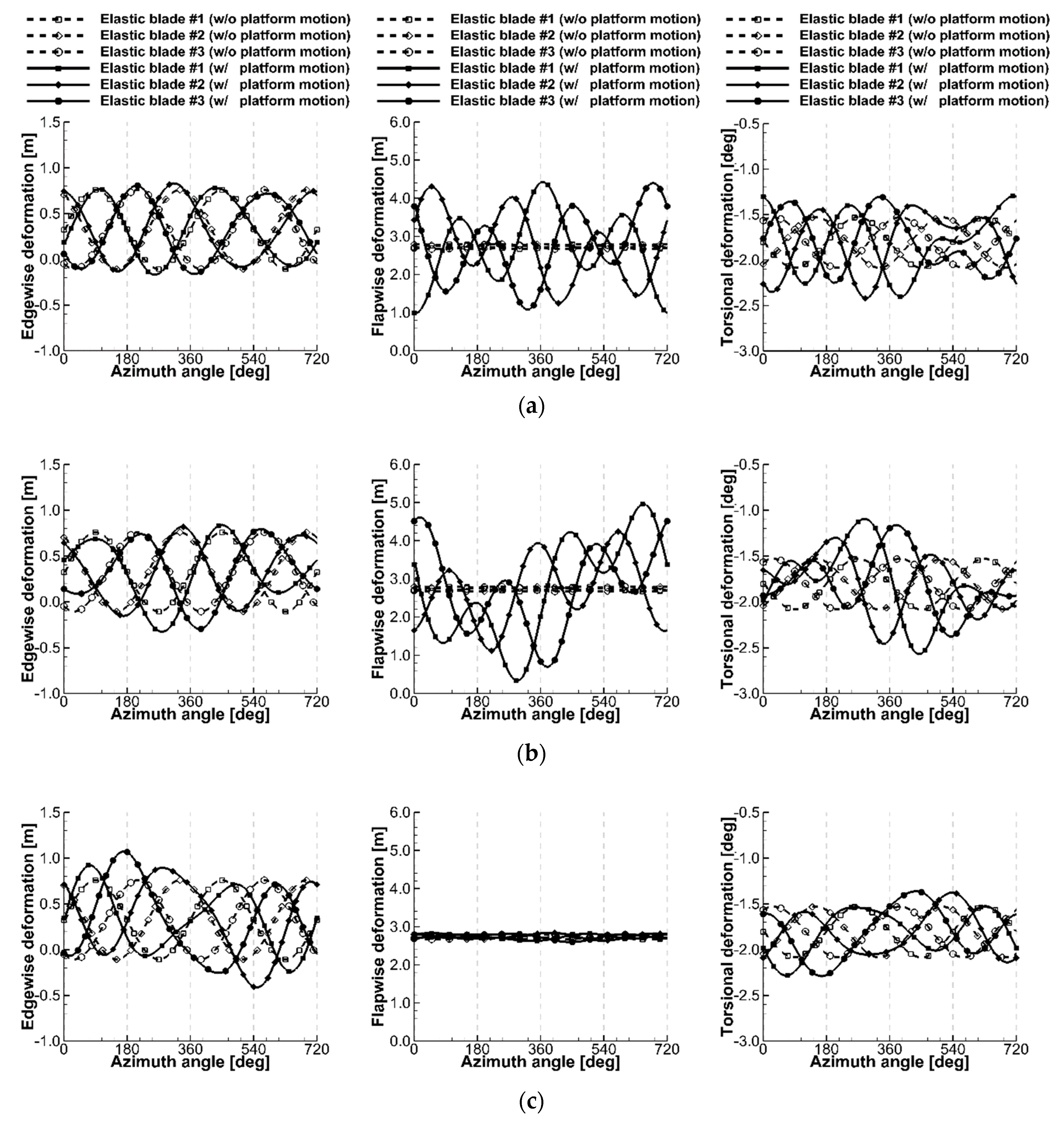
3.3. Aeroelastic Analyses of the Floating Offshore Wind Turbine
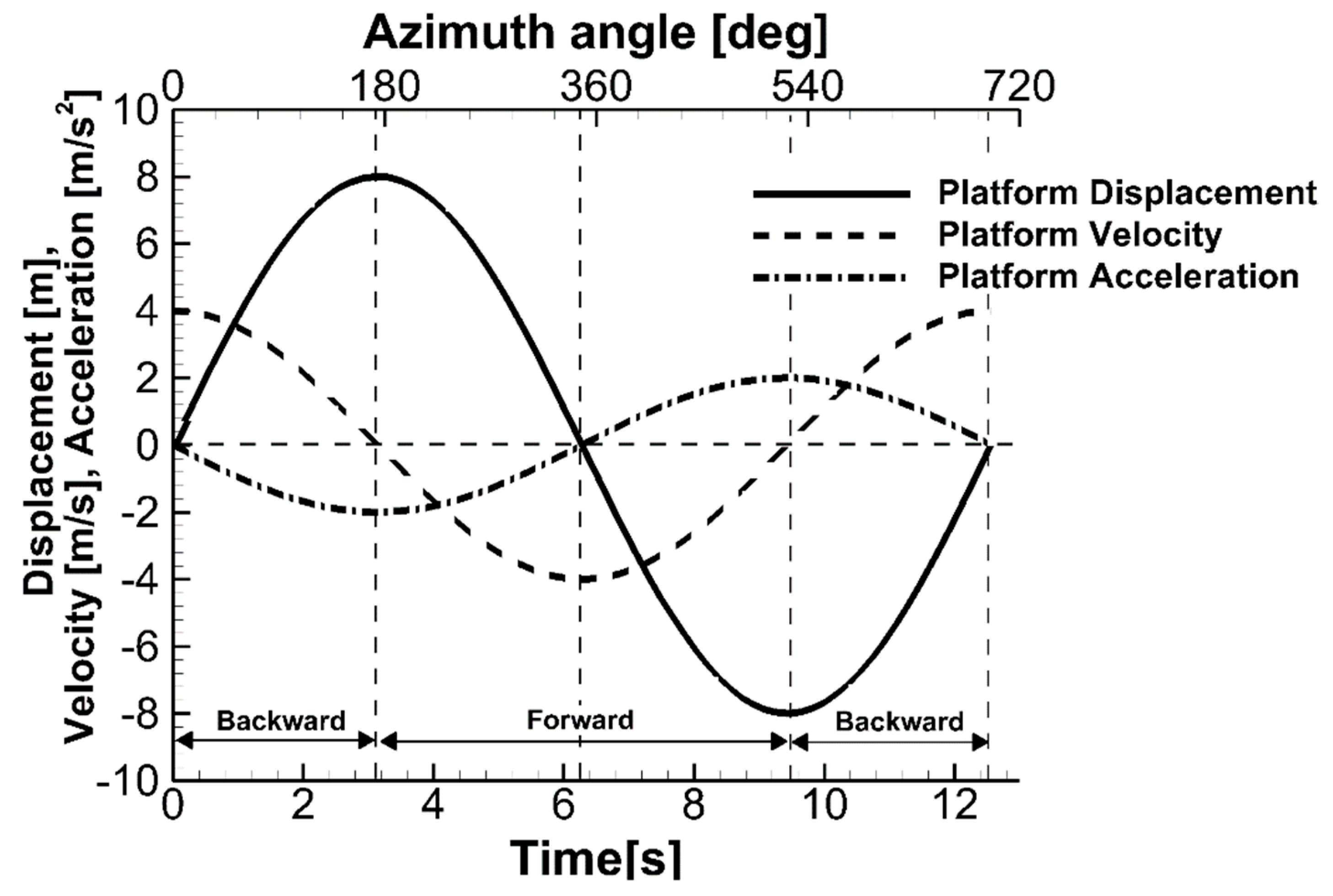
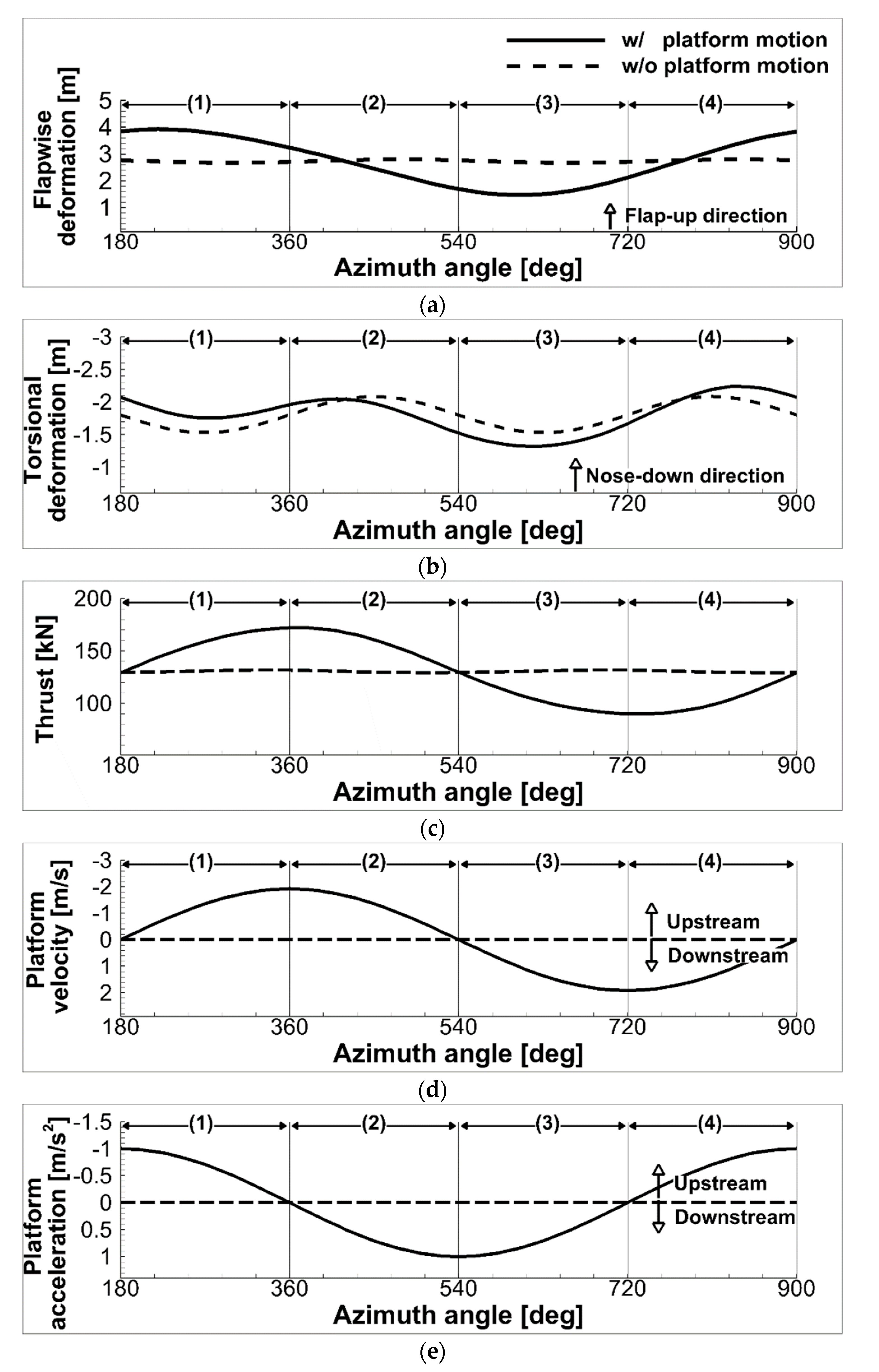
3.3.1. Consideration of Translational Platform Motions
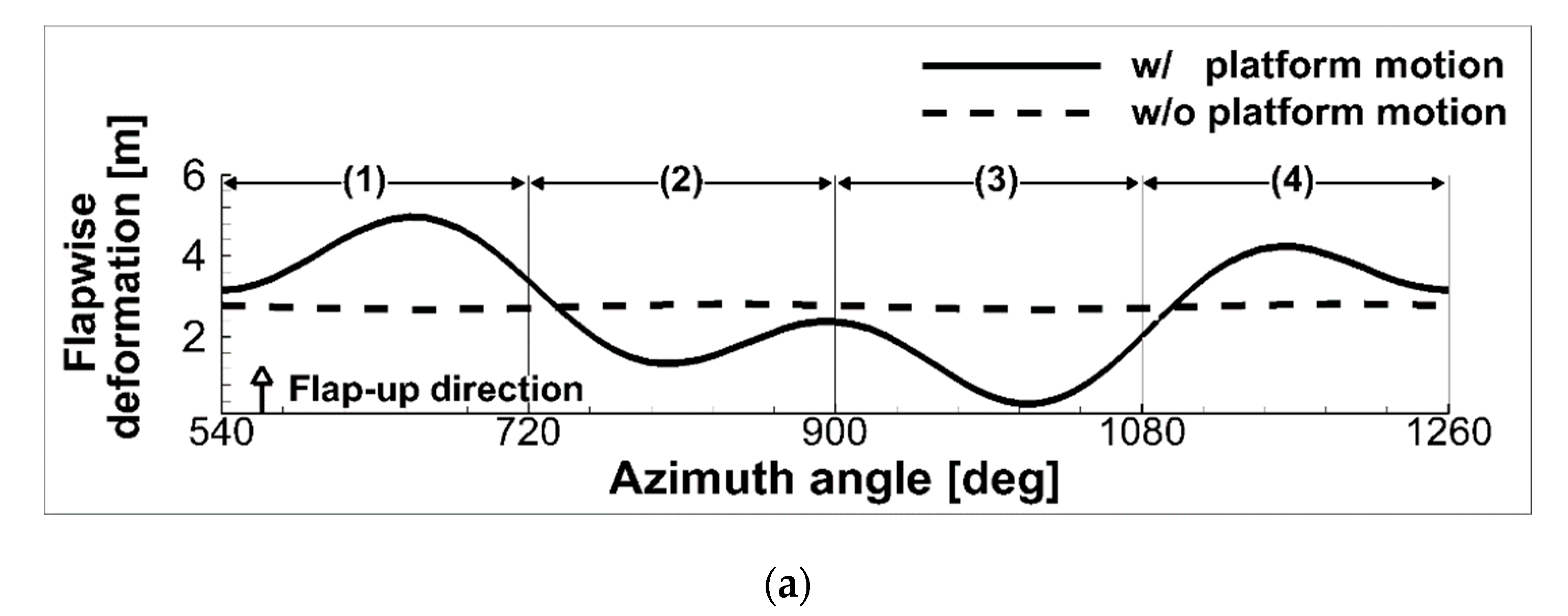
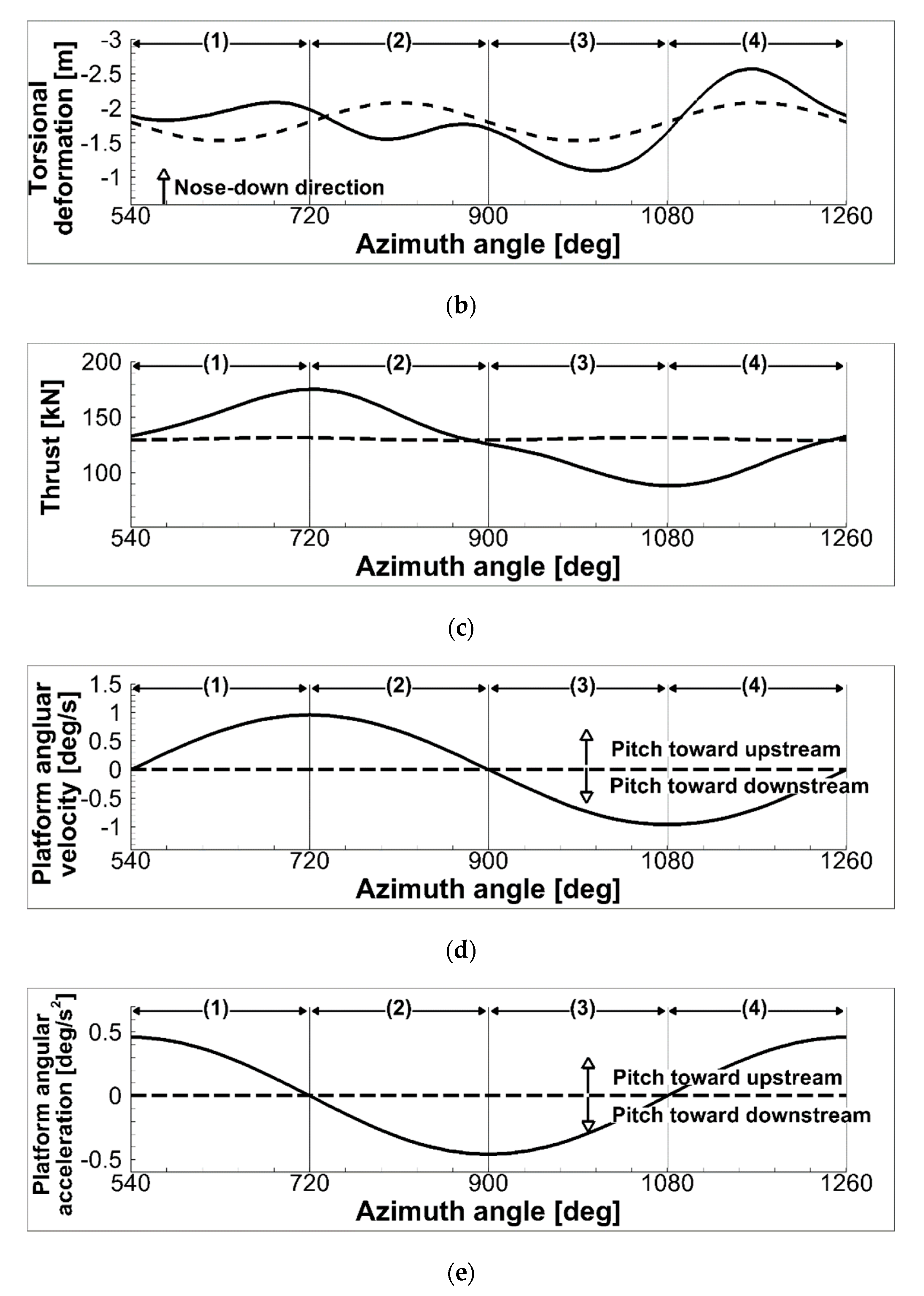
3.3.2. Consideration of Rotational Platform Motions
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BEM | Blade Element Momentum theory |
| CFD | Computational Fluid Dynamics |
| CSD | Computational Structural Dynamics |
| GDW | Generalized Dynamic Wake model |
| NREL | National Renewable Energy Laboratory |
| Thrust coefficient, | |
| Power coefficient, | |
| Amplitude of platform motion | |
| Vertical distance between top of tower and rotational center of platform, | |
| Vertical distance between top of tower and end of rotor shaft, | |
| Tower height, | |
| Overhang length, | |
| Nodal displacement vector represented by 15 degrees of freedom | |
| Blade span, | |
| Position vector of hub center defined in the nacelle frame | |
| Position vector of arbitrary point on deformed blade defined in the inertial frame | |
| Position vector of arbitrary point on the deformed blade defined in the hub frame | |
| Position vector of the bottom of nacelle defined in the tower frame | |
| Position vector of the rotational center of the platform defined in the inertial frame | |
| Position vector of the bottom of the tower defined in the tower frame | |
| Transformation matrix from the inertial frame to the tower frame | |
| Blade deformations in axial, edgewise (lead-lag), and flapwise directions, | |
| Coordinate system defined at a rotating hub center (Rotating hub frame) | |
| Coordinate system defined at a hub center (Hub frame) | |
| Inertial coordinate system (Inertial frame) | |
| Coordinate system defined at the bottom of nacelle (Nacelle frame) | |
| Coordinate system defined at the bottom of the tower (Tower frame) | |
| Coordinate system defined at the undeformed blade (Undeformed frame) | |
| Magnitudes of translational platform motion along with , and axes, | |
| Velocities of translational platform motion along with , and axes, | |
| Accelerations of translational platform motion along with , and axes, | |
| Shaft tilt angle, deg | |
| Blade pre-cone angle, deg | |
| Built-in pre-twist of blade, deg | |
| Rotational angles of platform with respect to , and axes, | |
| Angular velocities of platform with respect to , and axes, | |
| Angular accelerations of platform with respect to , and axes, | |
| Coordinate system defined at the deformed blade (Deformed frame) | |
| Blade mass per unit volume, | |
| Blade torsional deformation about deformed axis, | |
| Rotor azimuth angle, | |
| Angular velocity of the rotor, | |
| Frequency of the platform motion, |
| Blade | |
| Deformed frame | |
| Inertial frame | |
| Induced downwash | |
| Perpendicular direction | |
| Radial direction | |
| Tower frame | |
| Tangential direction | |
| Free-stream |
| Gravitational loads | |
| Aerodynamic loads |
References
- WindEurope. Wind Energy in Europe: Scenarios for 2030; WindEurope: Brussels, Belgium, 2017; pp. 7–11. [Google Scholar]
- Ram, B.; Energetics, Inc. Energy from Offshore Wind; National Renewable Energy Laboratory: Golden, CO, USA, 2006; p. 3.
- de Vaal, J.B.; Hansen, M.O.L.; Moan, T. Effect of wind turbine surge motion on rotor thrust and induced velocity. Wind Energy 2014, 17, 105–121. [Google Scholar] [CrossRef]
- Tran, T.T.; Kim, D.H. The platform pitching motion of floating offshore wind turbine: A preliminary unsteady aerodynamic analysis. J. Wind Eng. Ind. Aerodyn. 2015, 142, 65–81. [Google Scholar] [CrossRef] [Green Version]
- Tran, T.T.; Kim, D.H.; Nguyen, B.H. Aerodynamic Interference Effect of Huge Wind Turbine Blades with Periodic Surge Motions Using Overset Grid-Based Computational Fluid Dynamics Approach. J. Sol. Energy Eng. 2015, 137, 061003. [Google Scholar] [CrossRef]
- Tran, T.T.; Kim, D.H. Fully coupled aero-hydrodynamic analysis of a semi-submersible FOWT using a dynamic fluid body interaction. Renew. Energy 2016, 92, 244–261. [Google Scholar] [CrossRef]
- Rodriguez, S.N.; Jaworski, J.W. Towards identifying aeroelastic mechanisms in near-wake instabilities of floating offshore wind turbines. J. Energy Resour. Technol. 2017, 139, 051203. [Google Scholar] [CrossRef]
- Jeong, M.-S.; Cha, M.-C.; Kim, S.-W.; Lee, I.; Kim, T. Effects of torsional degree of freedom, geometric nonlinearity, and gravity on aeroelastic behavior of large-scale horizontal axis wind turbine blades under varying wind speed conditions. J. Renew. Sustain. Energy 2014, 6, 023126. [Google Scholar] [CrossRef]
- Yu, D.O. Predicting wind turbine blade loads and aeroelastic response using a coupled CFD-CSD method. Renew. Energy 2014, 70, 184–196. [Google Scholar] [CrossRef]
- Hodges, D.W.; Dowell, E.H. Nonlinear Equations of Motion for the Elastic Bending and Torsion of Twisted Nonuniform Rotor Blades; National Aeronautics and Space Administration: Washington, DC, USA, 1974.
- Newmark, N.M. A Method of Computation for Structural Dynamics. J. Eng. Mech. Div. 1959, 85, 67–95. [Google Scholar]
- Leishman, J.G. Principles of Helicopter Aerodynamics, 2nd ed.; Cambridge University Press: New York, NY, USA, 2005; p. 826. [Google Scholar]
- Hansen, M.O.L. Aerodynamics of Wind Turbines, 2nd ed.; Earthscan Ltd.: London, UK, 2008; p. 181. [Google Scholar]
- Butterfield, S.; Jonkman, J.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory: Golden, CO, USA, 2006.
- Johnson, W. CAMRAD II: Comprehensive Analytical Model of Rotorcraft Aerodynamics and Dynamics, Volume III: Rotorcraft Theory; Johnson Aeronautics: Palo Alto, CA, USA, 1992; p. 145. [Google Scholar]
- Leishman, J.G. Modeling of Subsonic Unsteady Aerodynamics for Rotary Wind Applications. J. Am. Helicopter Soc. 1998, 35, 29–38. [Google Scholar] [CrossRef]
- Leishman, J.G. Validation of Approximate Indicial Aerodynamics Functions for Two-Dimensional Subsonic Flow. J. Aircr. 1988, 25, 914–922. [Google Scholar] [CrossRef]
- Moriarty, P.J.; Hansen, A.C. AeroDyn Theory Manual; National Renewable Energy Laboratory: Golden, CO, USA, 2005.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rating | 5 MW |
|---|---|
| Rotor configuration | Upwind, three blades |
| Rotor, Hub diameters | 126 m, 3 m |
| Tower length () | 87.6 m |
| Overhang length () | 5 m |
| Shaft tilt angle () | 5˚ |
| Pre-cone angle () | 2.5˚ |
| Case 1 | Case 2 | Case 3 | Case 4 | |
|---|---|---|---|---|
| Amplitude () | 8 m | 8 m | 8 m | 8 m |
| Frequency () | 0.127 rad/s | 0.246 rad/s | 0.500 rad/s | 0.770 rad/s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.; Kwon, O.J. Effect of Platform Motion on Aerodynamic Performance and Aeroelastic Behavior of Floating Offshore Wind Turbine Blades. Energies 2019, 12, 2519. https://doi.org/10.3390/en12132519
Kim Y, Kwon OJ. Effect of Platform Motion on Aerodynamic Performance and Aeroelastic Behavior of Floating Offshore Wind Turbine Blades. Energies. 2019; 12(13):2519. https://doi.org/10.3390/en12132519
Chicago/Turabian StyleKim, Youngjin, and Oh Joon Kwon. 2019. "Effect of Platform Motion on Aerodynamic Performance and Aeroelastic Behavior of Floating Offshore Wind Turbine Blades" Energies 12, no. 13: 2519. https://doi.org/10.3390/en12132519
APA StyleKim, Y., & Kwon, O. J. (2019). Effect of Platform Motion on Aerodynamic Performance and Aeroelastic Behavior of Floating Offshore Wind Turbine Blades. Energies, 12(13), 2519. https://doi.org/10.3390/en12132519