Comparative Analysis of Fault-Tolerant Dual-Channel BLDC and SR Motors


Abstract
:1. Introduction
- asymmetry control of both channels,
- short circuits of part of the winding of one of the channels, and
- open-phase of the winding of one of the channels.
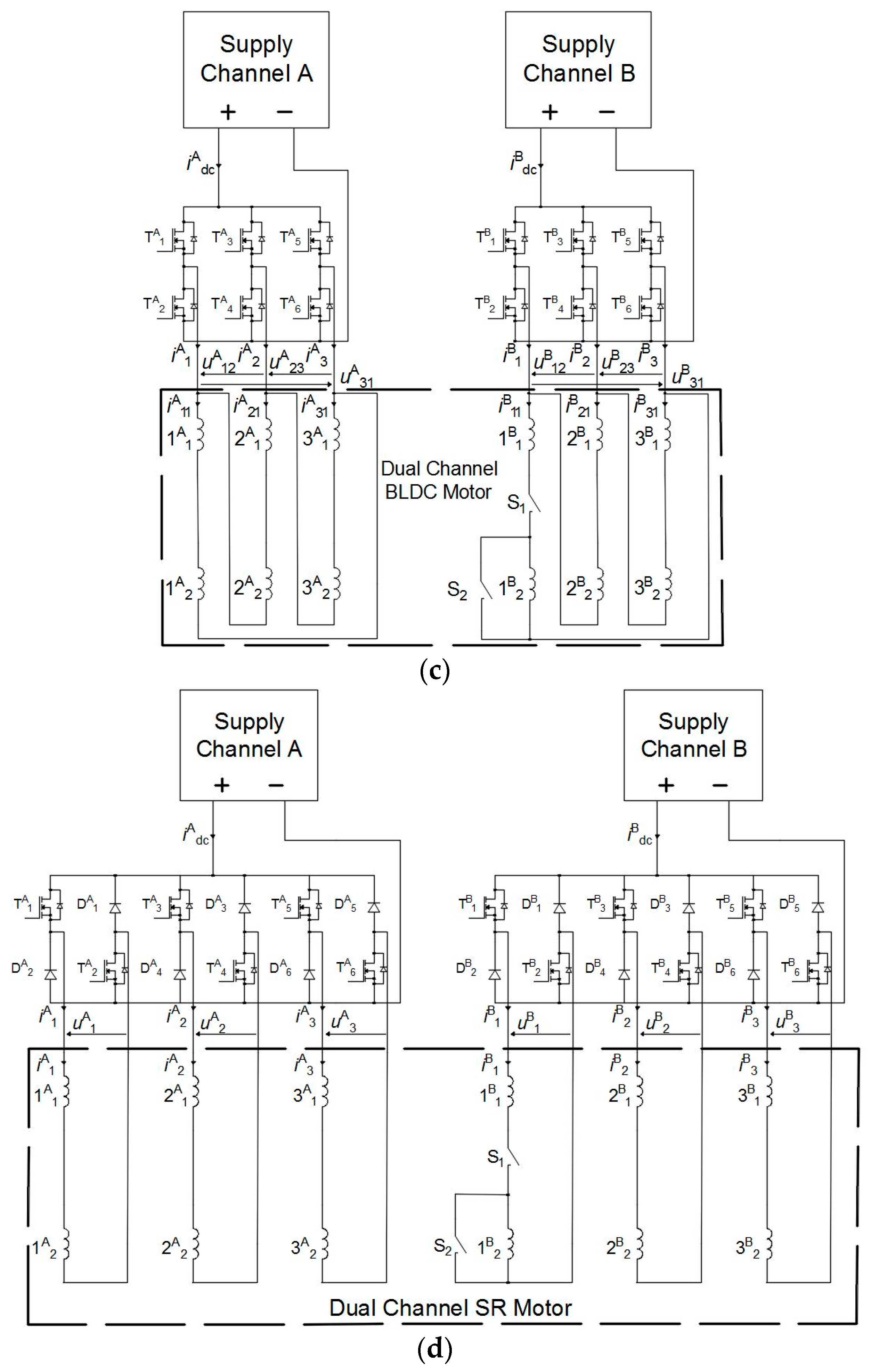
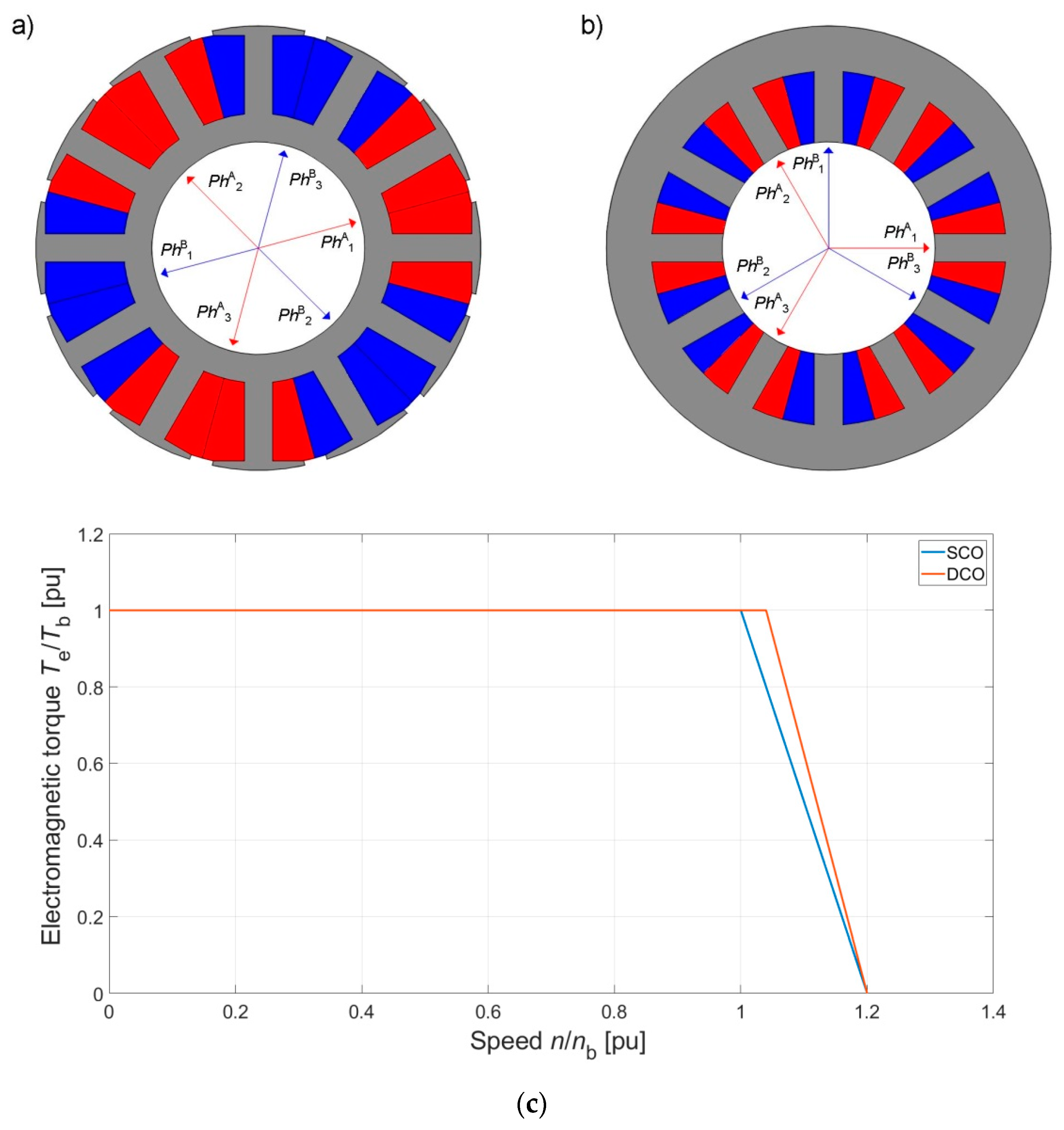
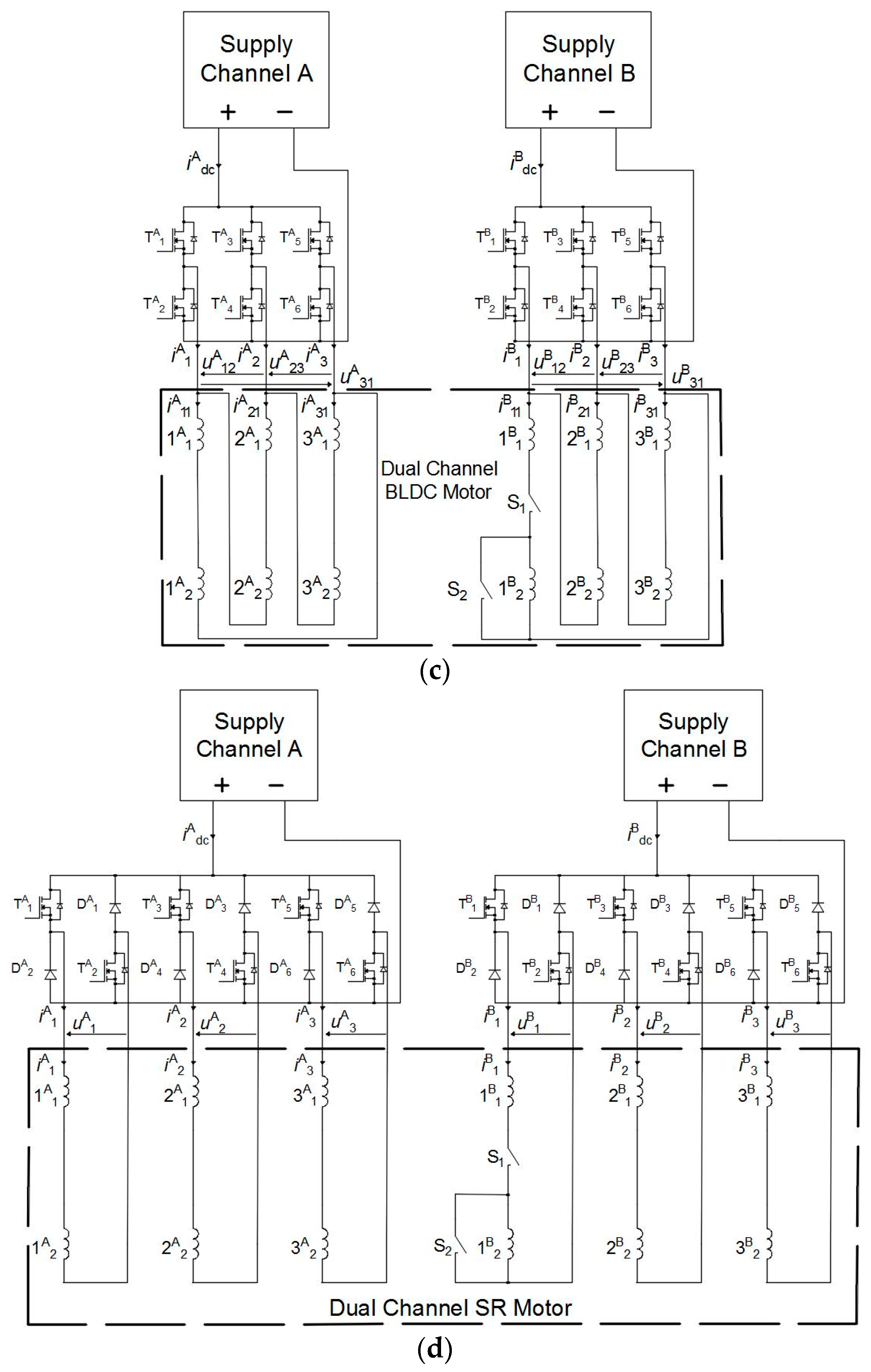
2. Analysis of the DCBLDC and DCSR Motors
3. A Mathematical Model of the DCBLDC and DCSR Motors Analyzed
3.1. Main Assumptions and General Equation Structure
- symmetry of the magnetic circuit structure of both the stator and the rotor;
- decomposition of phase fluxes into a sum of fluxes induced by phase currents (leakage and main fluxes) and fluxes from permanent magnets in the DCBLDCM;
- omission of phenomena related to eddy currents and magnetic hysteresis;
- omission of the influence of temperature on the parameters of the machines and the fluxes generated by permanent magnets (in the DCBLDCM).
3.2. Mathematical Models of DCBLDC Motors
3.2.1. DCBLDCM—DCO Mode
3.2.2. DCBLDCM—SCO Mode
3.3. Mathematical Models of DCSR Motors
3.3.1. DCSRM—DCO Mode
3.3.2. DCSRM—SCO Mode
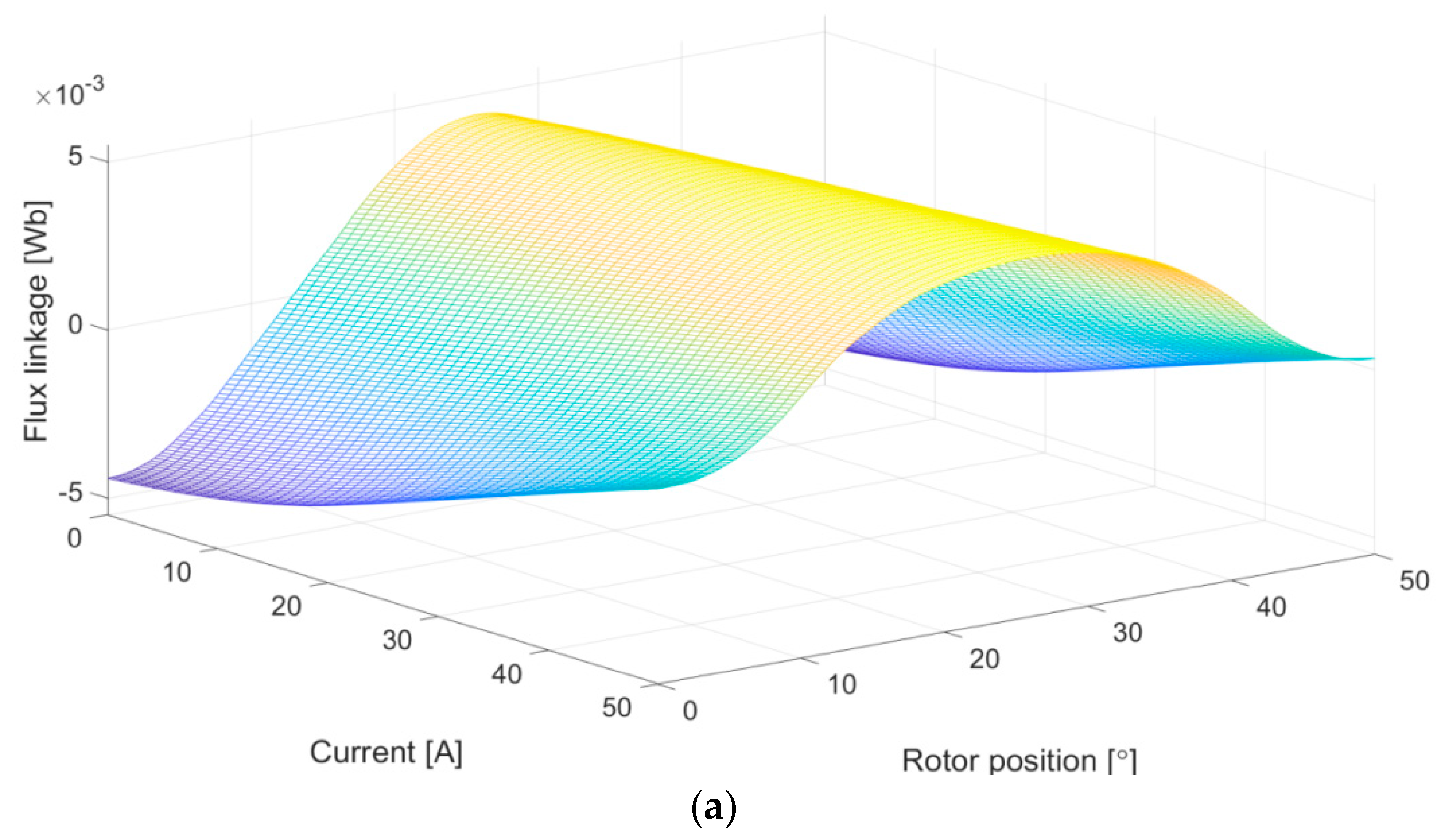
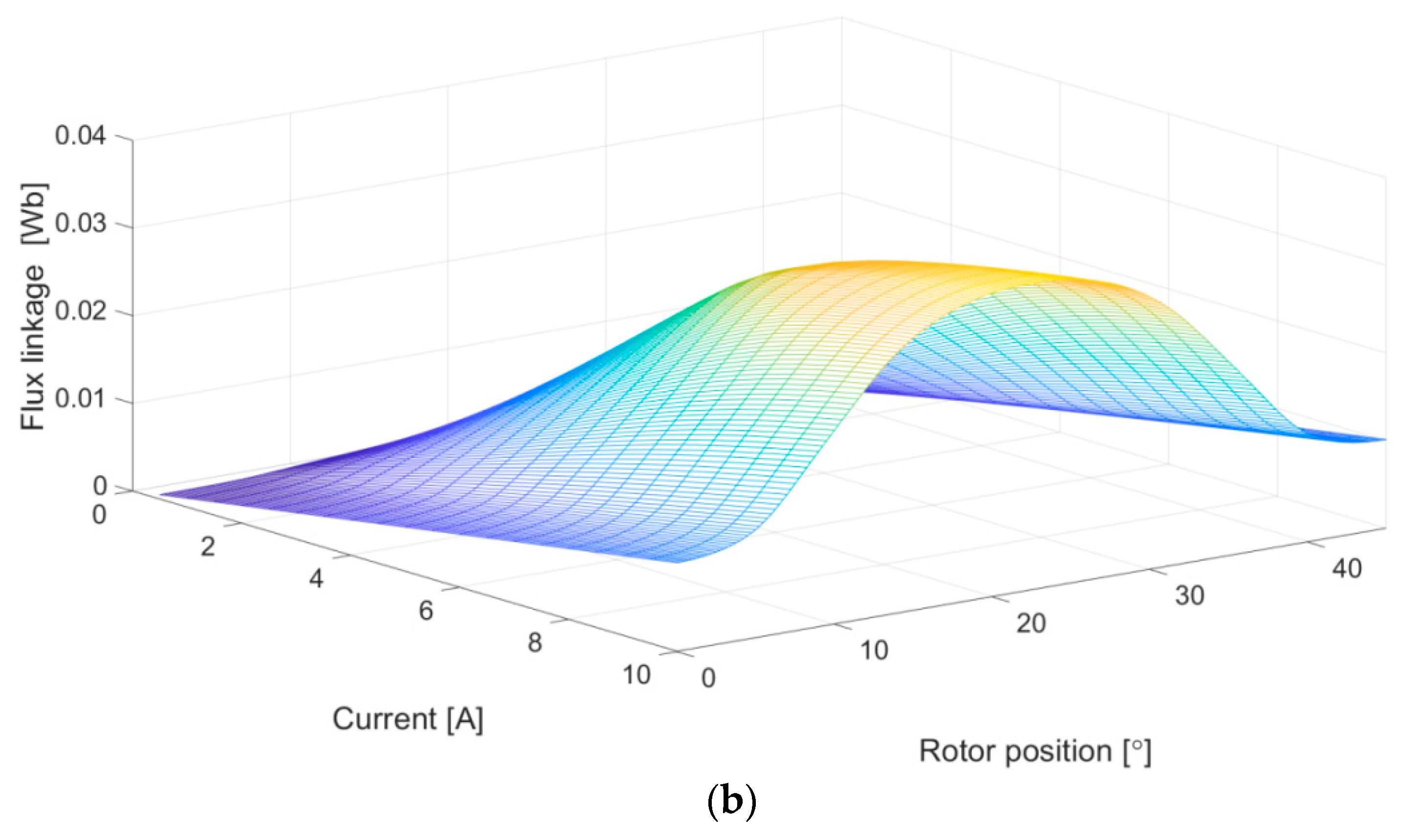
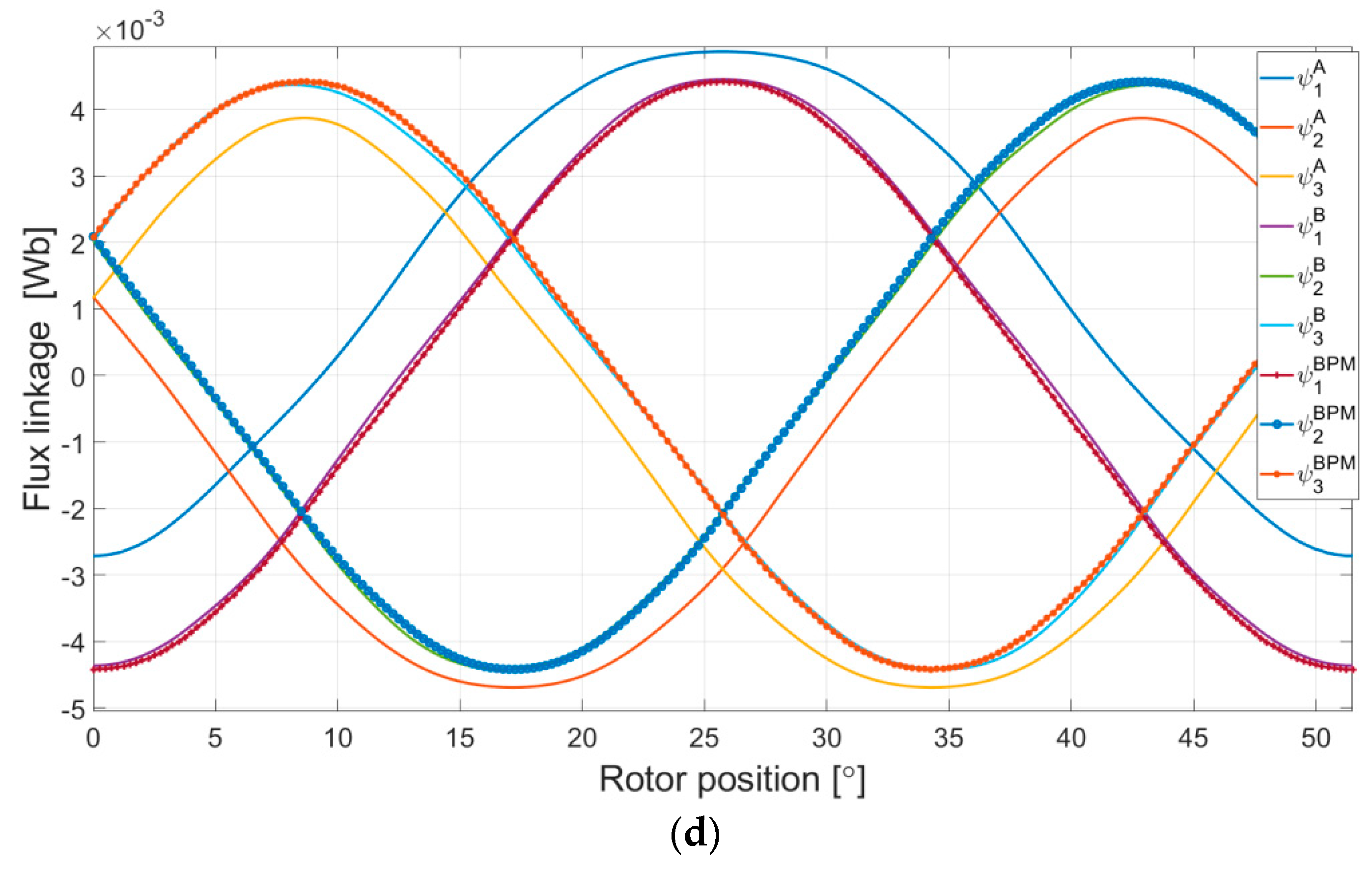
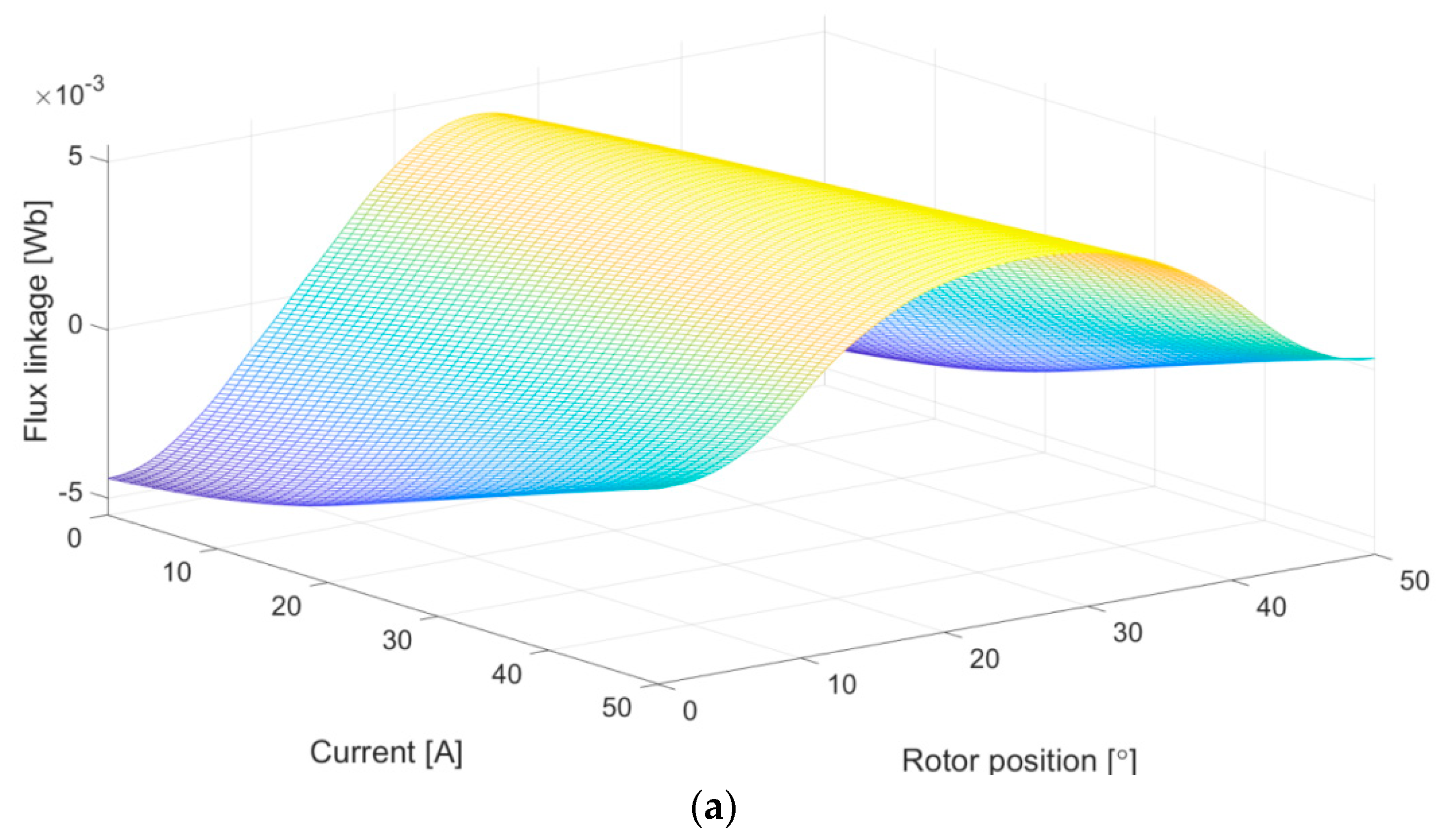
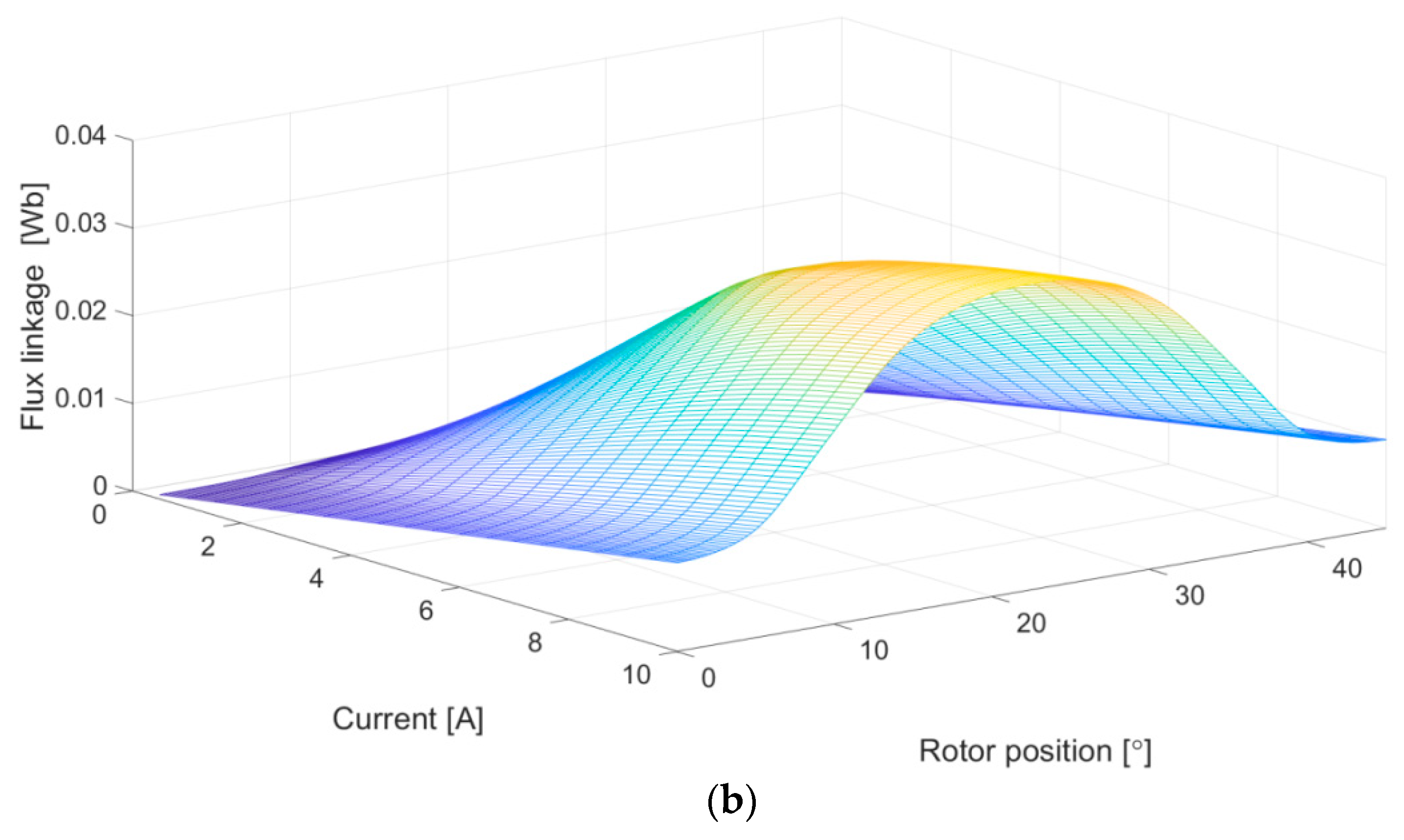
3.4. Flux Characteristics for Simulation Models
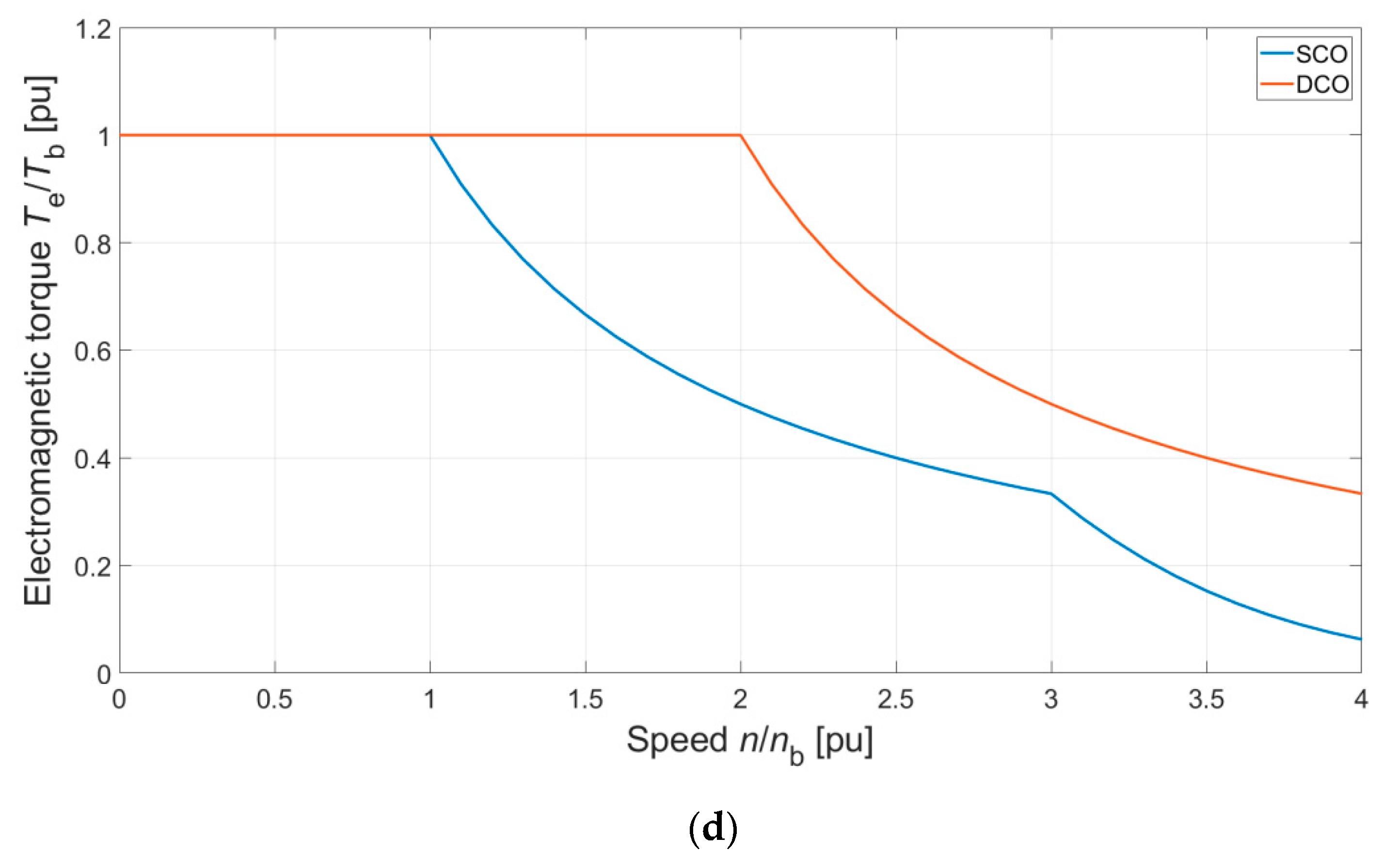
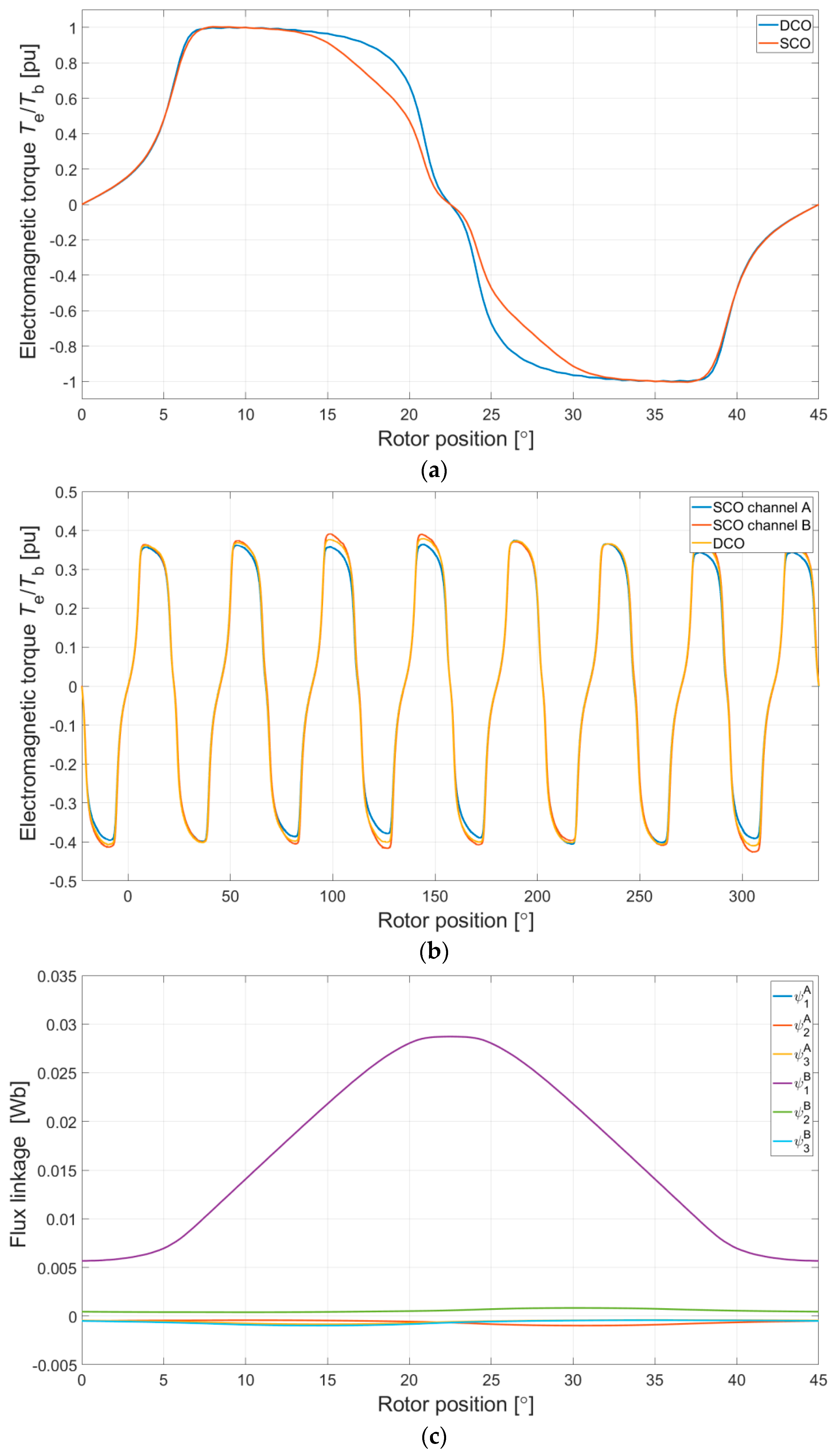
4. Static Analysis
4.1. Characteristics of the DCBLDCM
4.2. Characteristics of the DCSRM
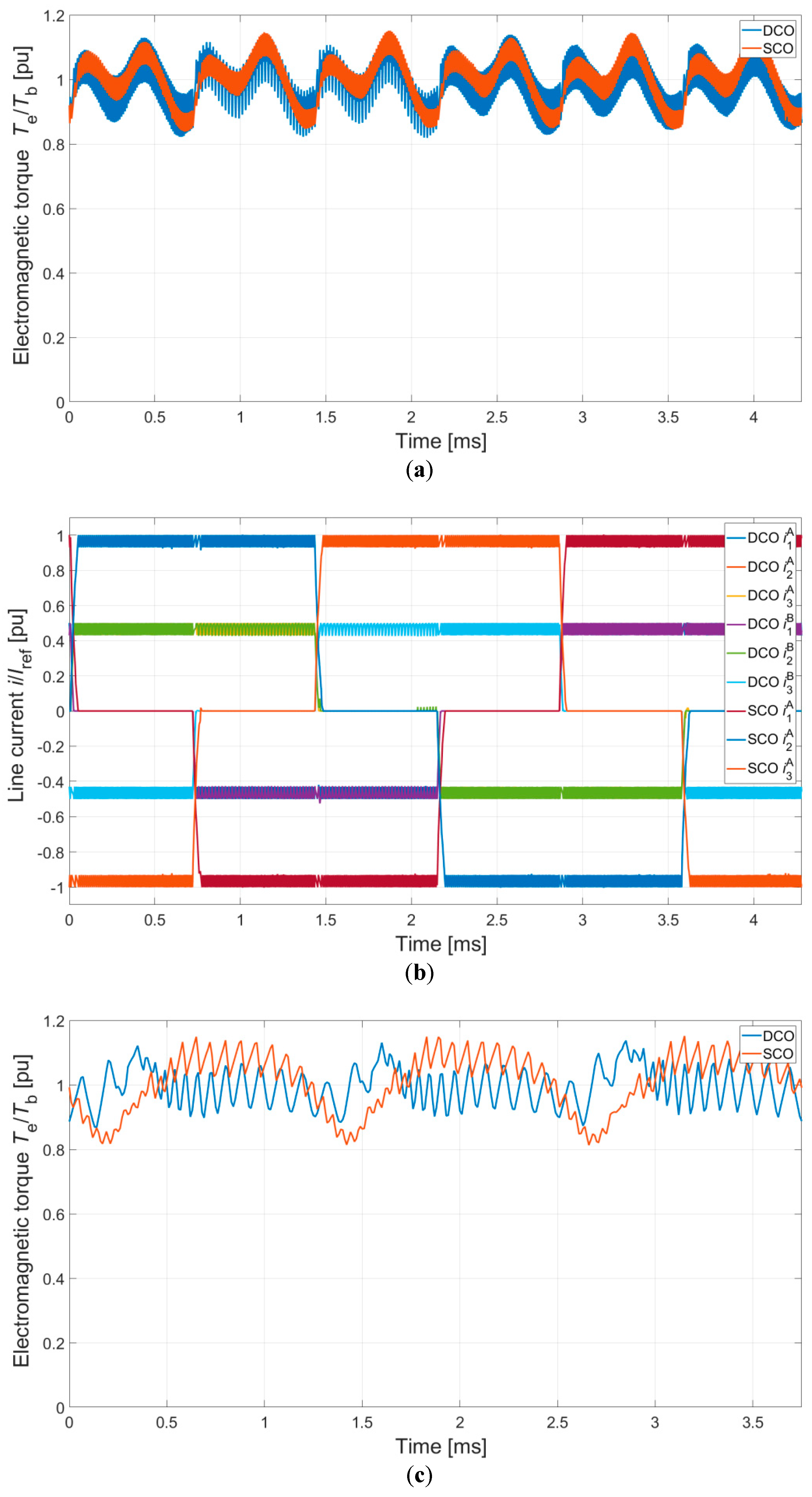
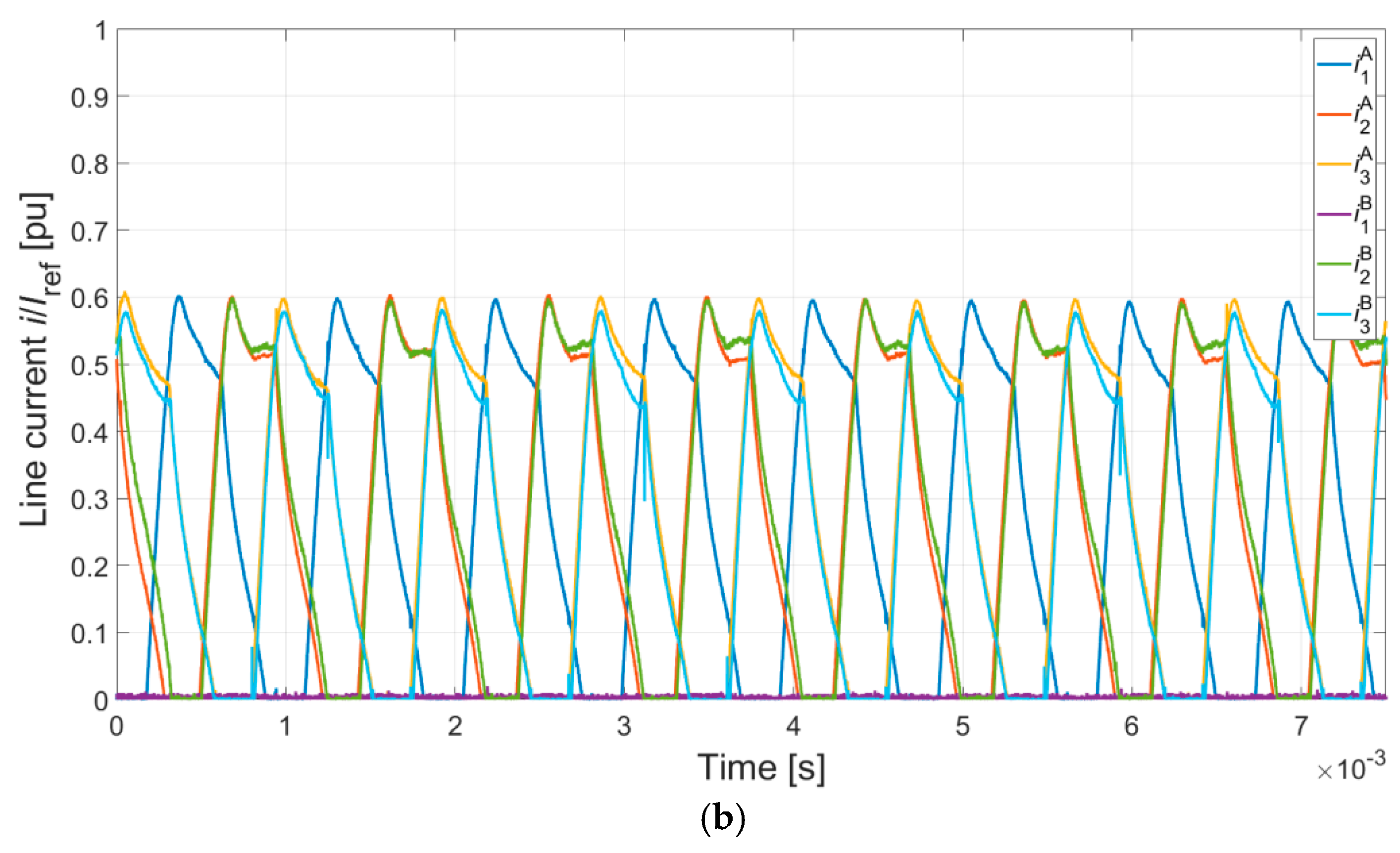
5. Transient Analysis
5.1. DCO and SCO
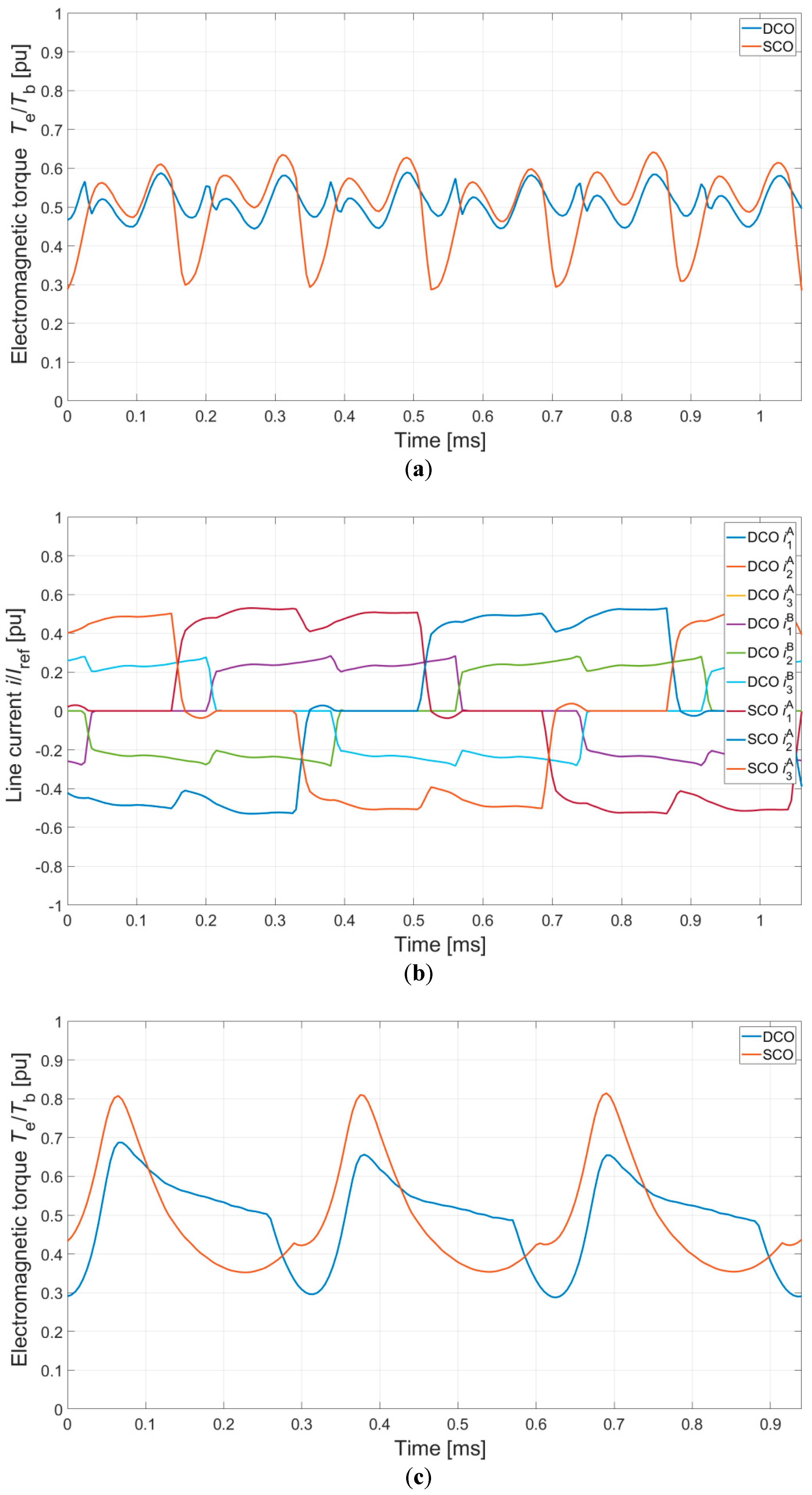
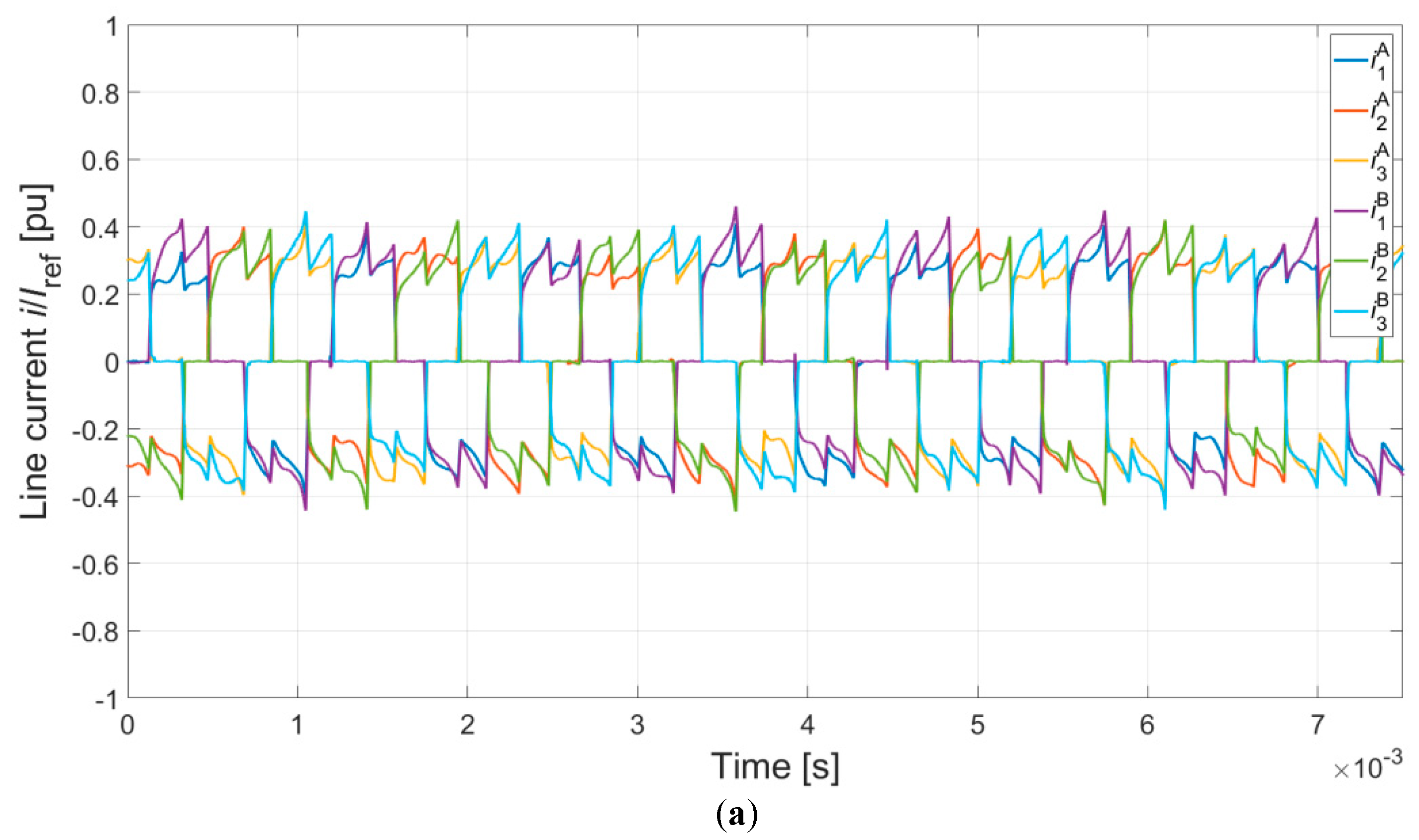
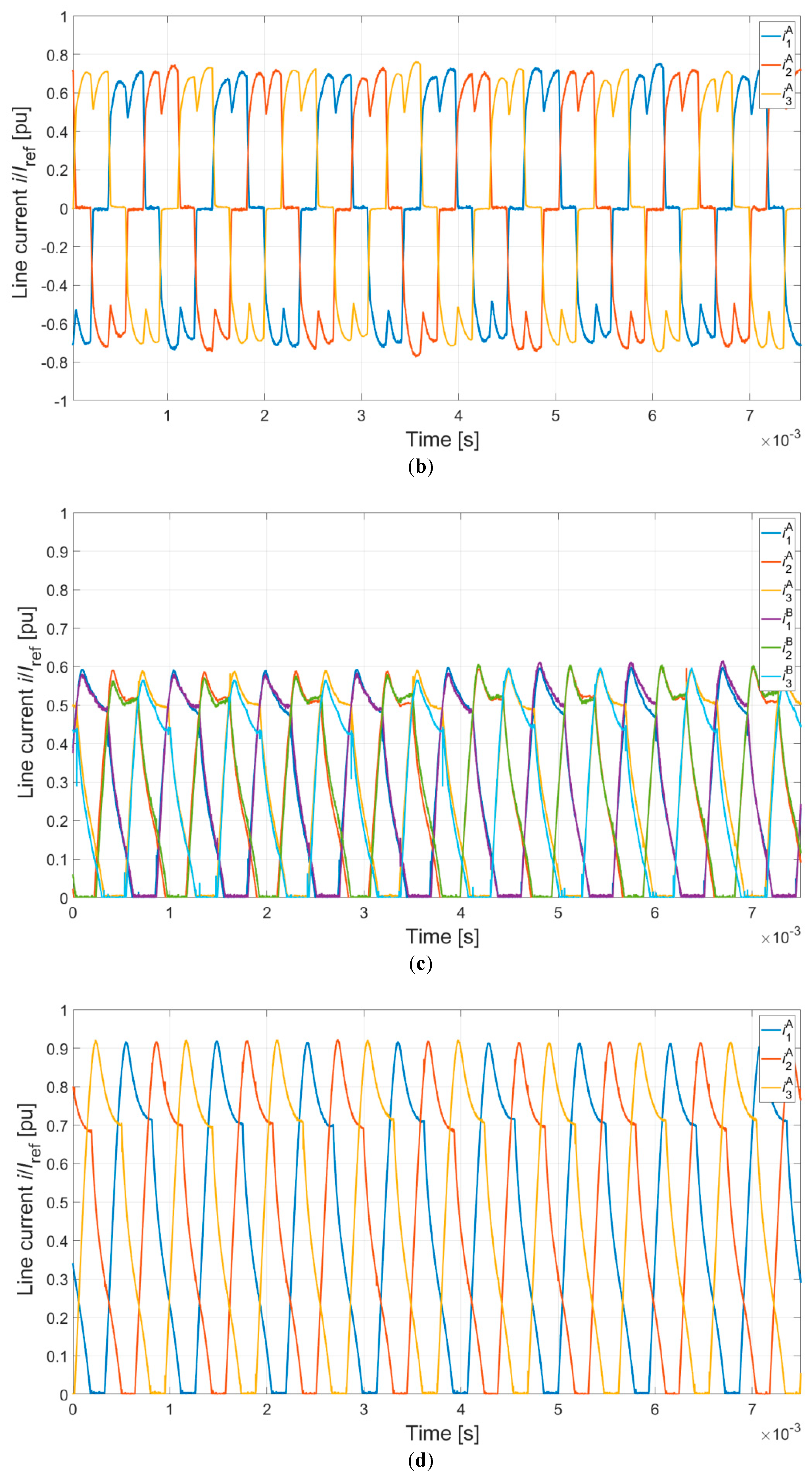
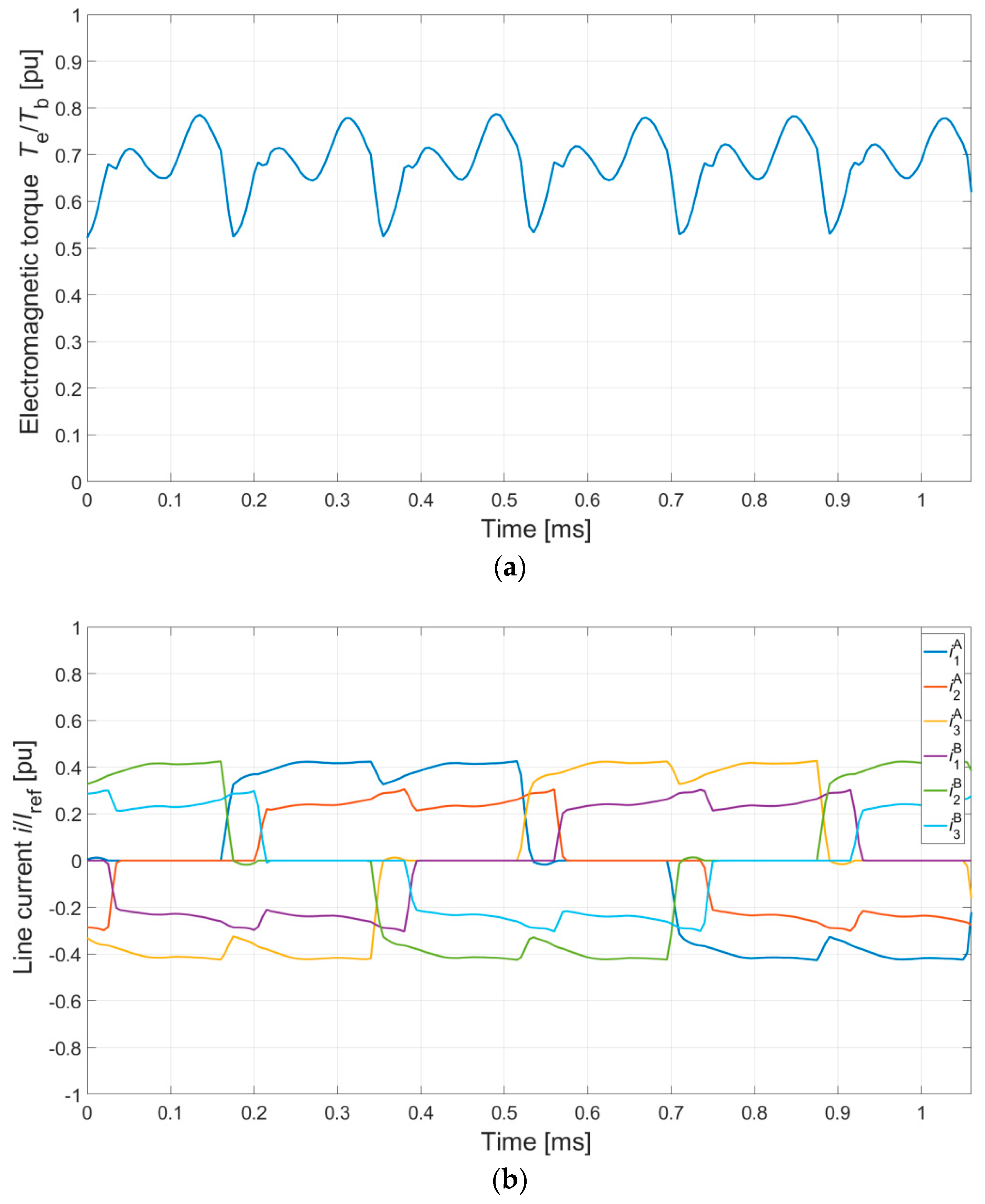
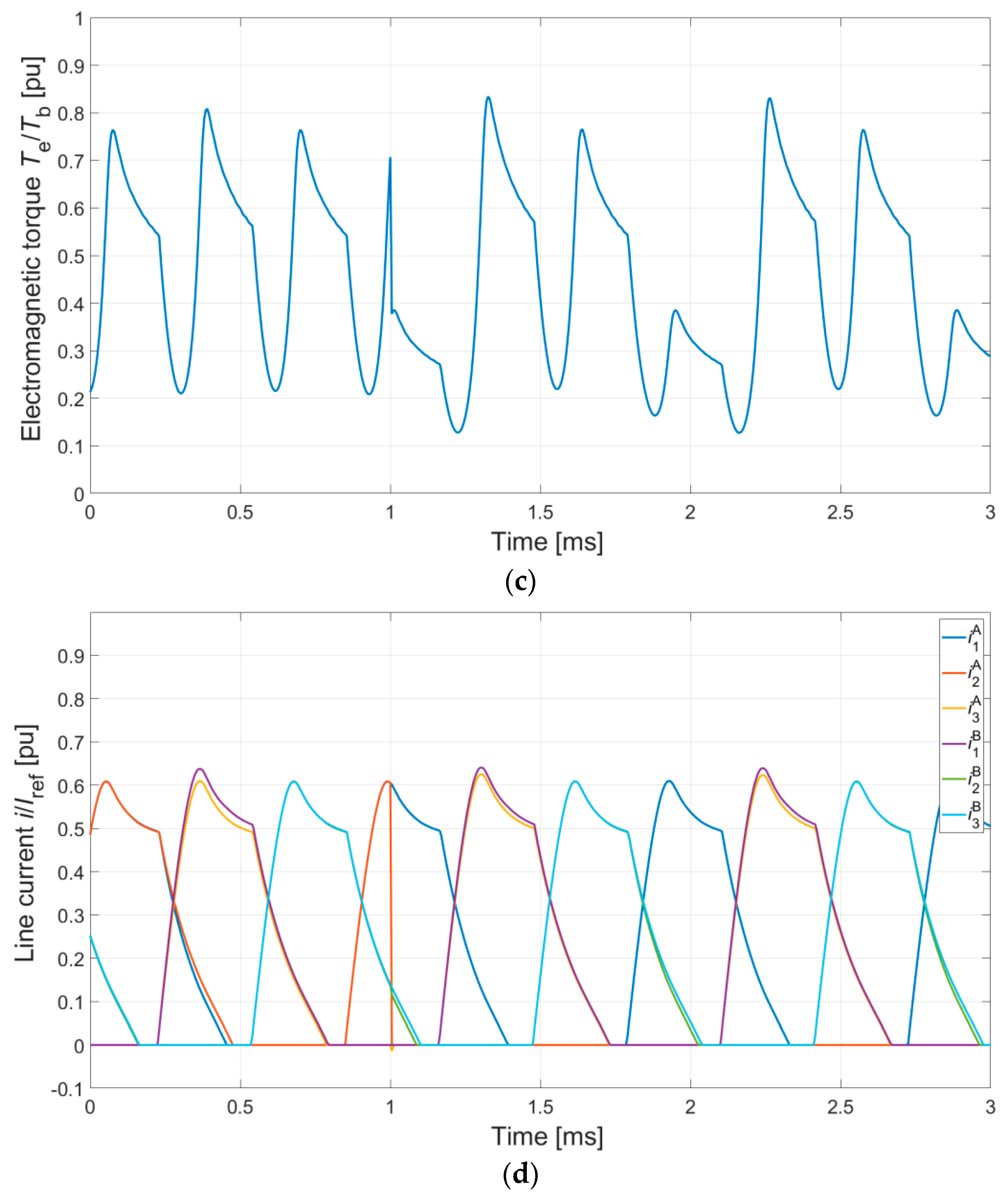
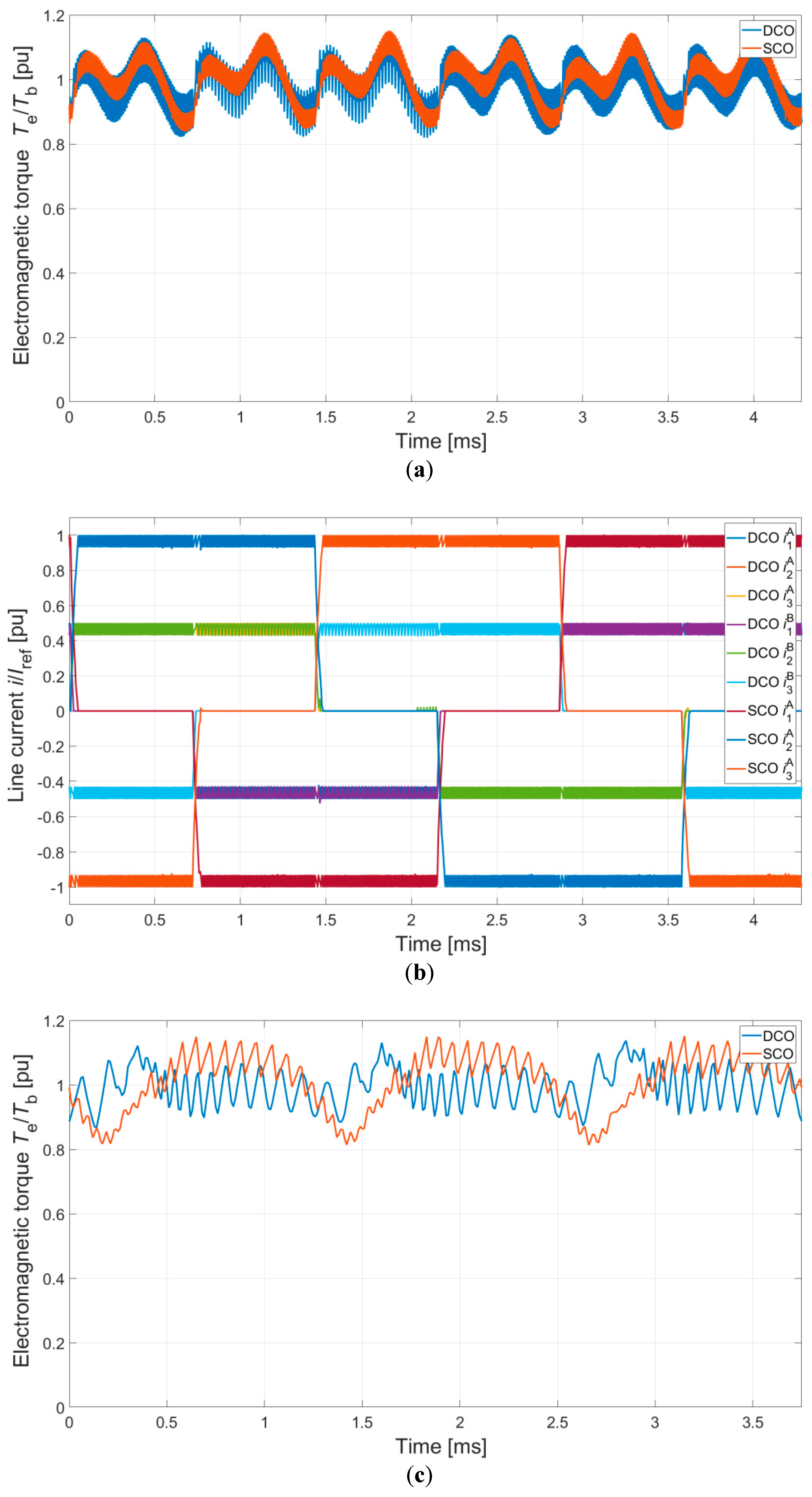
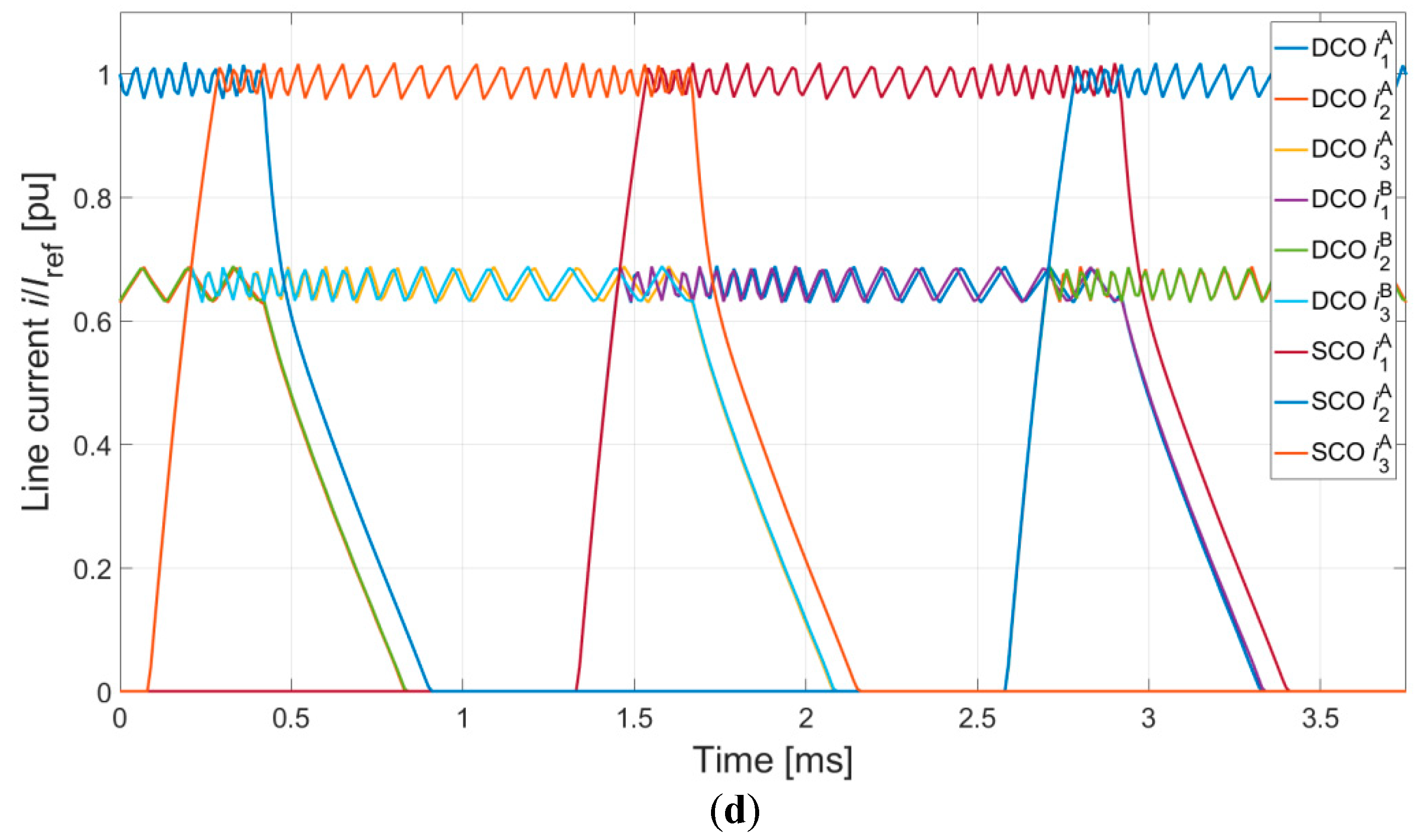
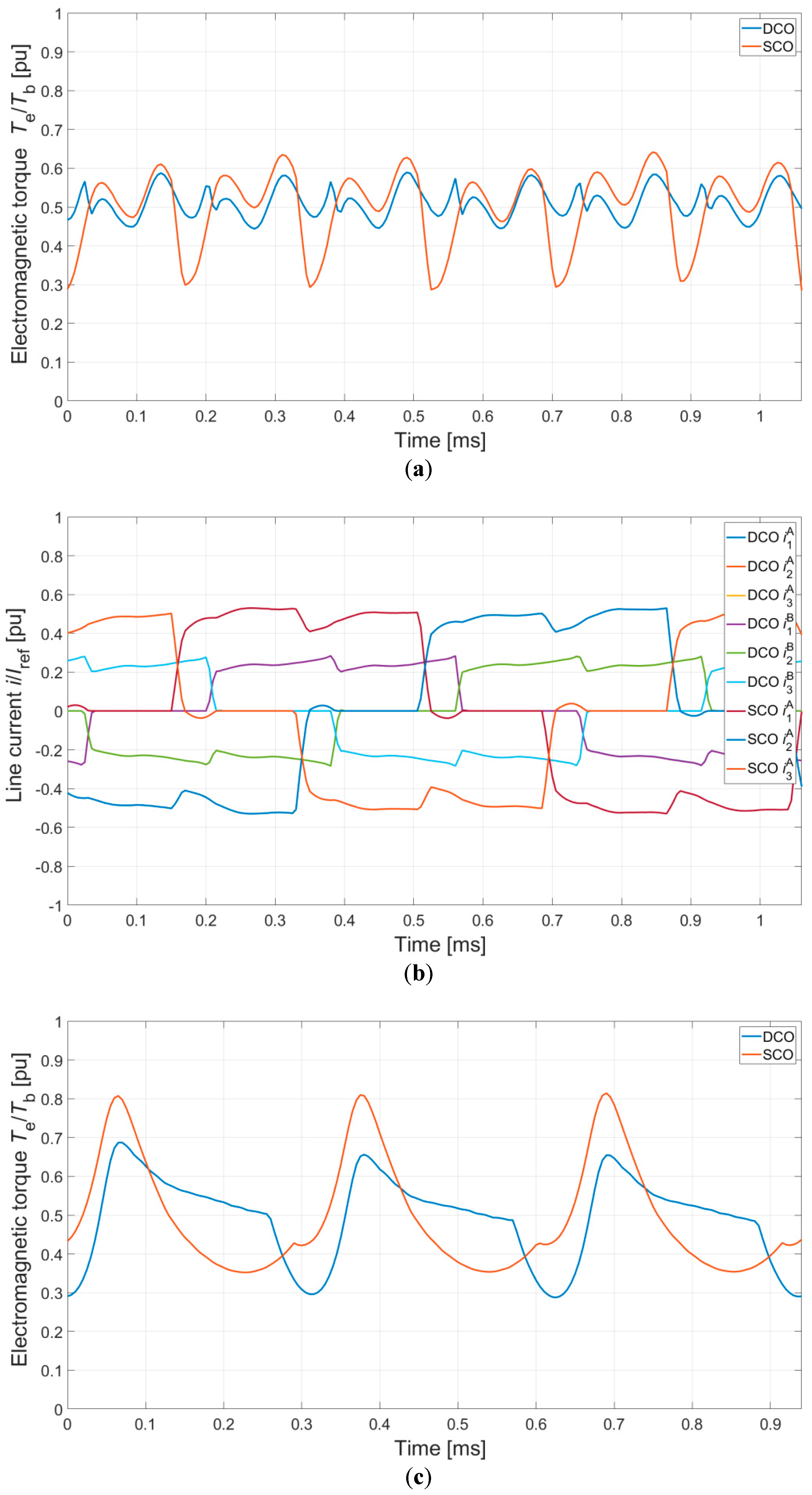
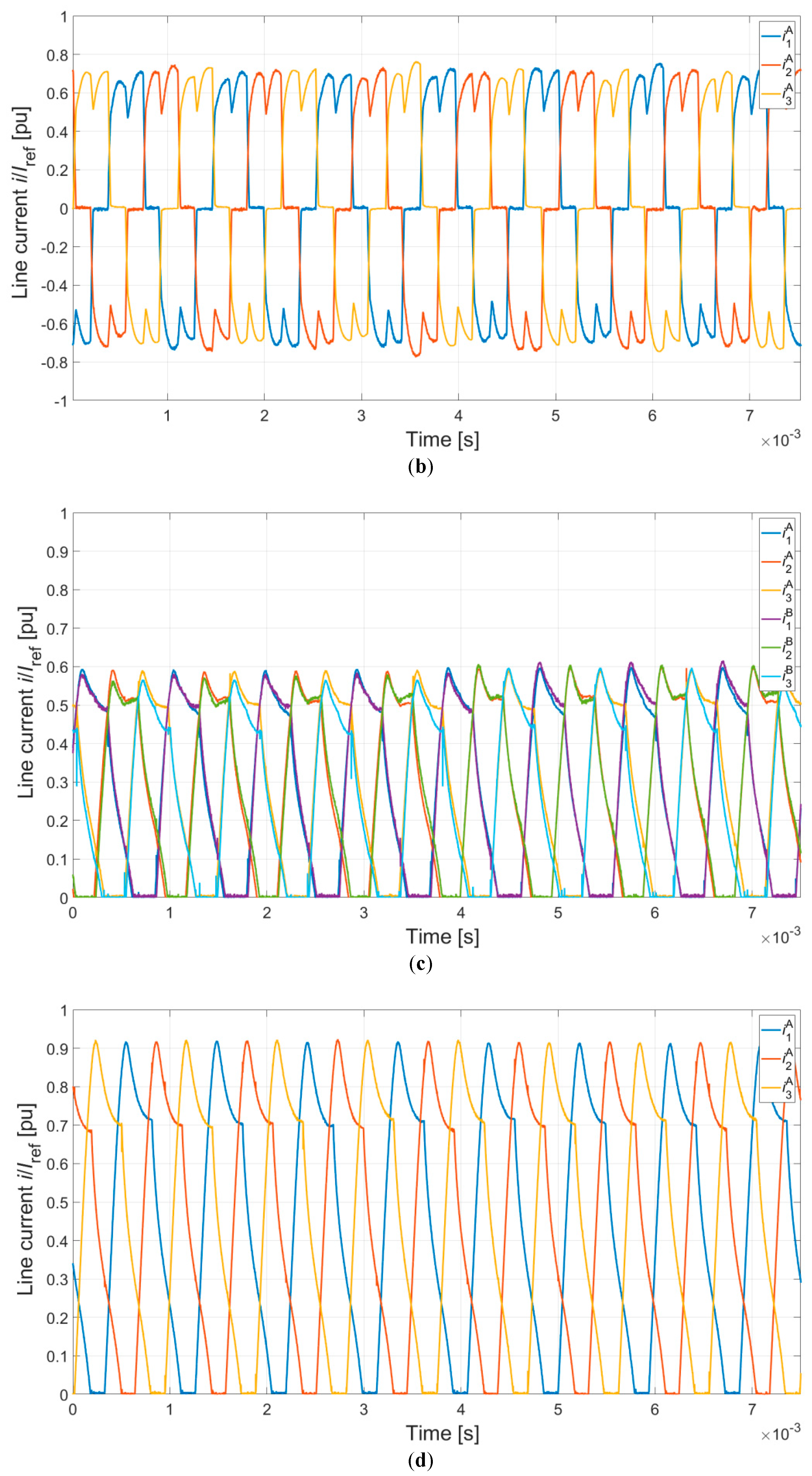
5.1.1. Constant Torque Operation
5.1.2. Operation without Current Control
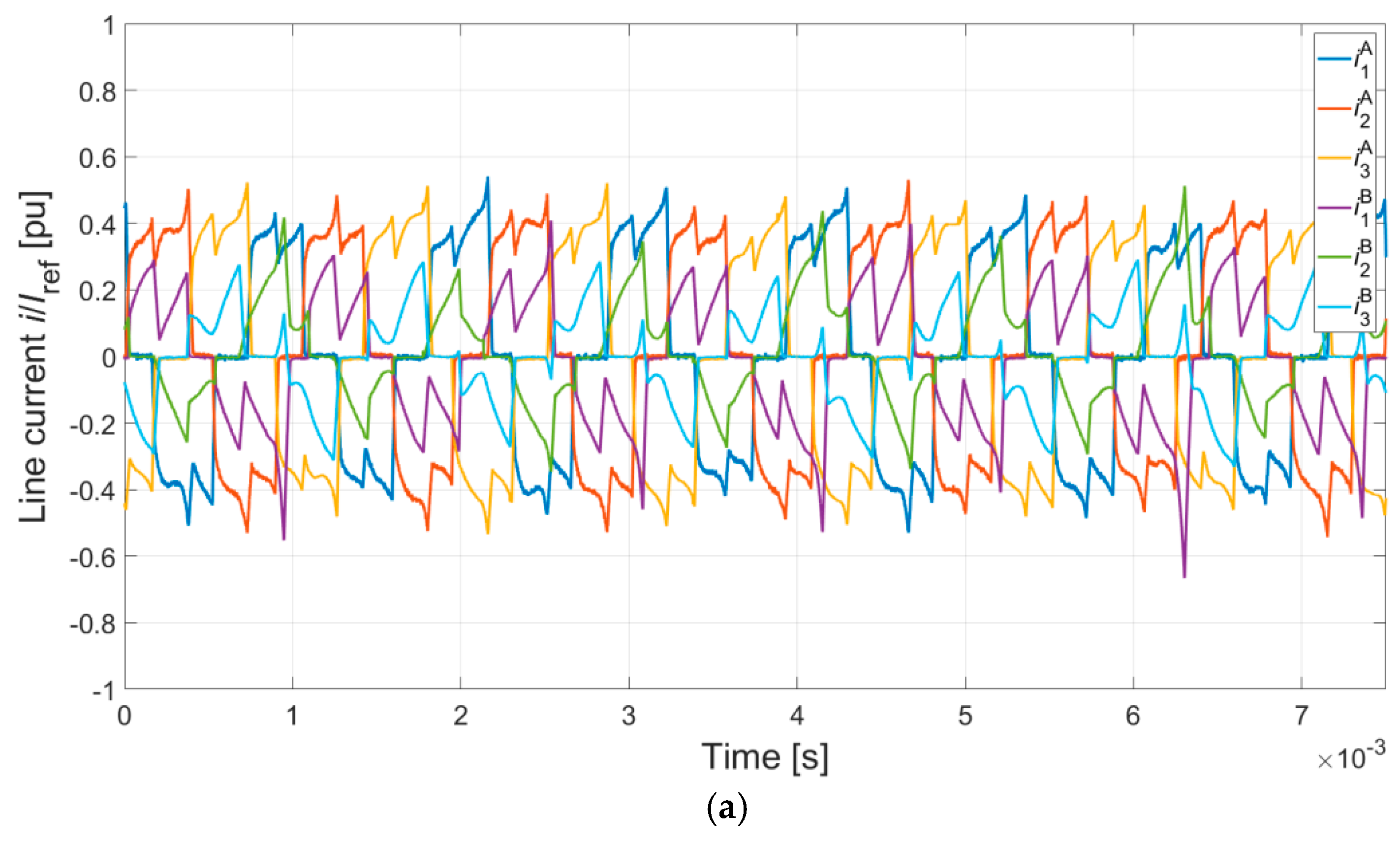
5.2. Influence of Asymmetrical Control in DCO Operation
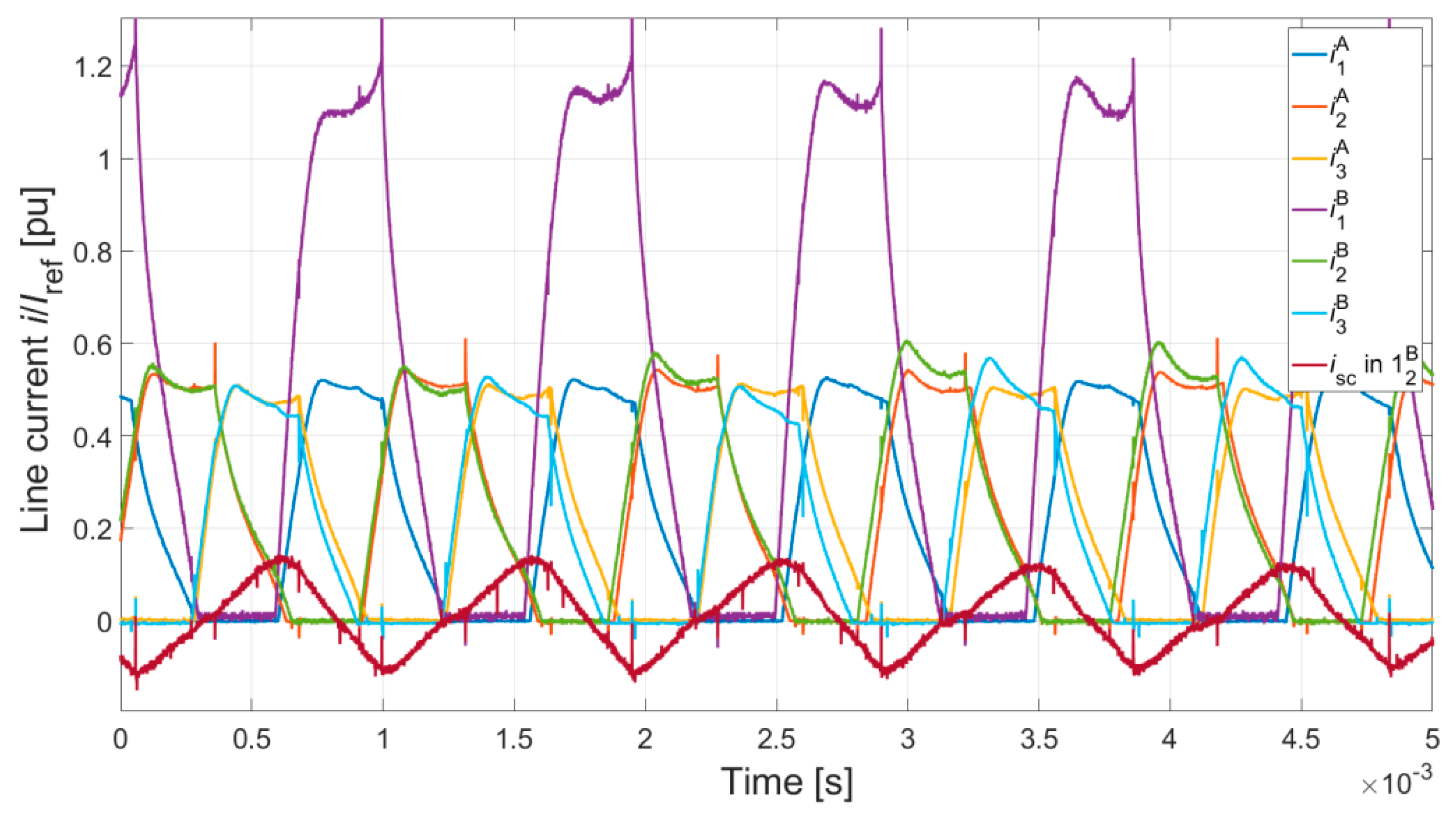
5.3. Influence of Shorted Coil in DCO Mode
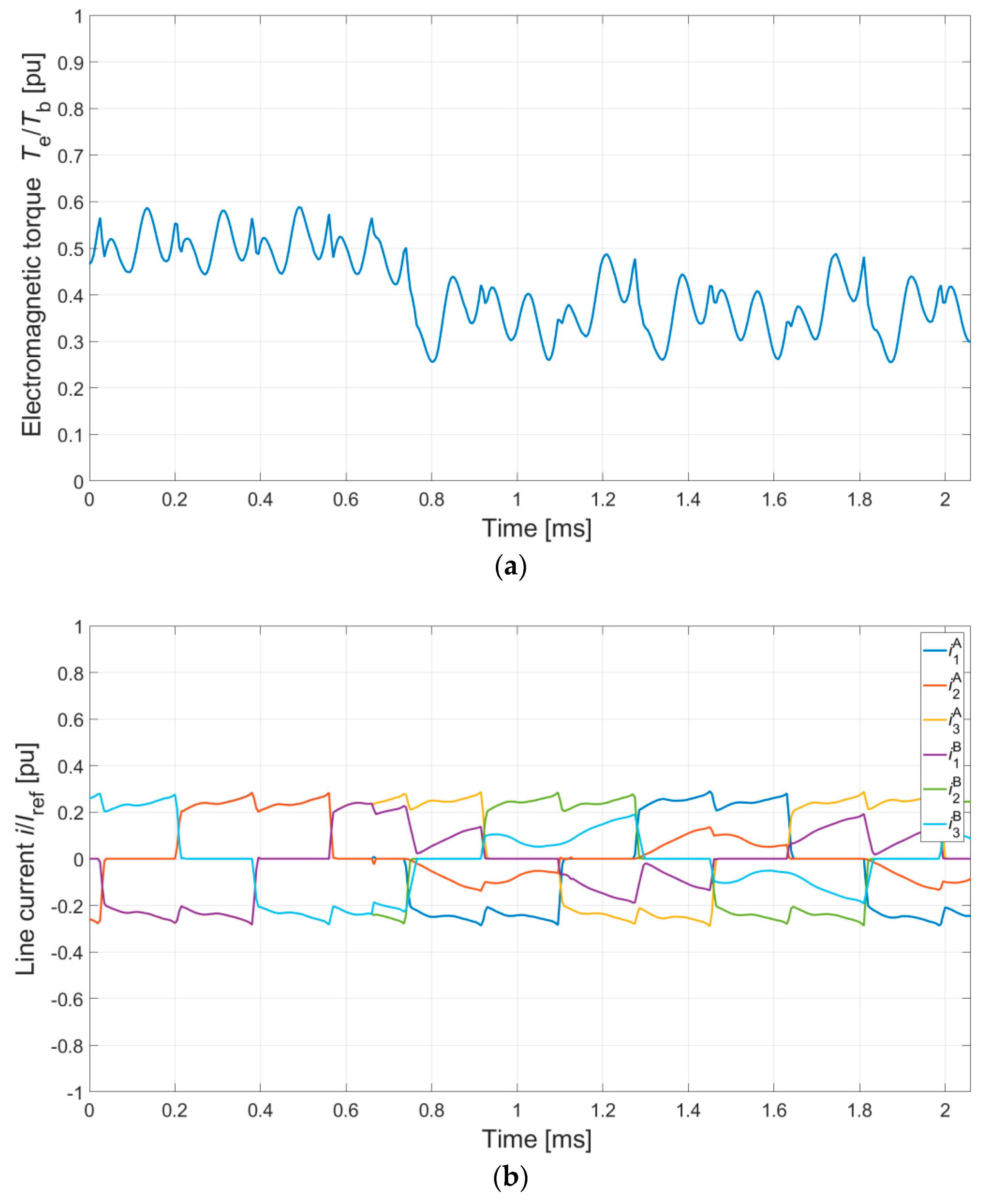
5.4. Influence of an Open Phase in DCO Mode
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Parsa, L.; Toliyat, H.A. Five-Phase Permanent-Magnet Motor Drives. IEEE Trans. Ind. Appl. 2005, 41, 30–37. [Google Scholar] [CrossRef]
- Levi, E.; Jones, M.; Vukosavic, S.N. A series-connected two-motor six-phase drive with induction and permanent magnet machines. IEEE Trans. Energy Convers. 2006, 21, 121–129. [Google Scholar] [CrossRef]
- Zheng, P.; Sui, Y.; Zhao, J.; Tong, C.; Lipo, T.A.; Wang, A. Investigation of a Novel Five-Phase Modular Permanent-Magnet In-Wheel Motor. IEEE Trans. Magn. 2011, 47, 4084–4087. [Google Scholar] [CrossRef]
- Zhou, Y.; Lin, X.; Cheng, M. A Fault-Tolerant Direct Torque Control for Six-Phase Permanent Magnet Synchronous Motor with Arbitrary Two Opened Phases Based on Modified Variables. IEEE Trans. Energy Convers. 2016, 31, 549–556. [Google Scholar] [CrossRef]
- Radun, A.V.; Ferreira, C.A.; Richter, E. Two-channel switched reluctance starter/generator results. IEEE Trans. Ind. Appl. 1998, 34, 1026–1034. [Google Scholar] [CrossRef]
- Chai, J.; Wang, J.; Atallah, K.; Howe, D. Performance Comparison and Winding Fault Detection of Duplex 2-Phase and 3-Phase Fault-Tolerant Permanent Magnet Brushless Machines. In Proceedings of the 2007 IEEE Industry Applications Annual Meeting, New Orleans, LA, USA, 23–27 September 2007; pp. 566–572. [Google Scholar]
- Barcaro, M.; Nicola Bianchi, N.; Magnussen, F. Analysis and Tests of a Dual Three-Phase 12-Slot 10-Pole Permanent-Magnet Motor. IEEE Trans. Ind. Appl. 2010, 46, 2355–2362. [Google Scholar] [CrossRef]
- Ding, W.; Liang, D.; Sui, H. Dynamic Modeling and Performance Prediction for Dual-Channel Switched Reluctance Machine Considering Mutual Coupling. IEEE Trans. Magn. 2010, 46, 3652–3663. [Google Scholar] [CrossRef]
- Ding, W.; Liang, D. Comparison of transient and steady-state performances analysis for a dual-channel switched reluctance machine operation under different modes’. IET Electr. Power Appl. 2010, 4, 603–617. [Google Scholar] [CrossRef]
- Barcaro, M.; Bianchi, N.; Magnussen, F. Six-Phase Supply Feasibility Using a PM Fractional-Slot Dual Winding Machine. IEEE Trans. Ind. Appl. 2011, 47, 2042–2050. [Google Scholar] [CrossRef]
- Ding, W.; Liu, L.; Lou, J.; Liu, Y. Comparative Studies on Mutually Coupled Dual-Channel Switched Reluctance Machines with Different Winding Connections. IEEE Trans. Magn. 2013, 49, 5574–5589. [Google Scholar] [CrossRef]
- Ding, W.; Lou, J.; Liu, L. Improved decoupled model of mutually coupled dual-channel SRM with consideration of magnetic saturation in dual-channel operation. IET Electr. Power Appl. 2013, 7, 427–440. [Google Scholar] [CrossRef]
- Ding, W.; Liu, Y.; Hu, Y. Performance evaluation of a fault-tolerant decoupled dual-channel switched reluctance motor drive under open-circuits. IET Electr. Power Appl. 2014, 8, 117–130. [Google Scholar] [CrossRef]
- Jiang, X.; Huang, W.; Cao, R.; Hao, Z.; Li, J.; Jiang, W. Analysis of a Dual-Winding Fault-Tolerant Permanent Magnet Machine Drive for Aerospace Applications. IEEE Trans. Magn. 2015, 51, 8114704. [Google Scholar] [CrossRef]
- Jiang, X.; Huang, W.; Cao, R.; Hao, Z.; Jiang, W. ‘Electric Drive System of Dual-Winding Fault-Tolerant Permanent-Magnet Motor for Aerospace Applications’. IEEE Trans. Ind. Electron. 2015, 62, 7322–7330. [Google Scholar] [CrossRef]
- Mese, E.; Yasa, Y.; Akca, H.; Aydeniz, M.G.; Garip, M. Investigating Operating Modes and Converter Options of Dual Winding Permanent Magnet Synchronous Machines for Hybrid Electric Vehicles. IEEE Trans. Energy Convers. 2015, 30, 285–295. [Google Scholar] [CrossRef]
- Bai, H.; Zhu, J.; Qin, J.; Sun, J. Fault-tolerant control for a dual-winding fault-tolerant permanent magnet motor drive based on SVPWM. IET Power Electron. 2017, 10, 509–516. [Google Scholar] [CrossRef]
- Chen, Q.; Xu, D.; Xu, L.; Wang, J.; Lin, Z.; Zhu, X. Fault-Tolerant Operation of a Novel Dual-Channel Switched Reluctance Motor Using Two 3-Phase Standard Inverters. IEEE Trans. App. Supercond. 2018, 28, 5204205. [Google Scholar] [CrossRef]
- Miyama, Y.; Ishizuka, M.; Kometani, H.; Akatsu, K. Vibration Reduction by Applying Carrier Phase-Shift PWM on Dual Three-Phase Winding Permanent Magnet Synchronous Motor. IEEE Trans. Ind. Appl. 2018, 54, 5998–6004. [Google Scholar] [CrossRef]
- Zhu, J.; Bai, H.; Wang, X.; Li, X. Current Vector Control Strategy in a Dual-Winding Fault-Tolerant Permanent Magnet Motor Drive. IEEE Trans. Energy Convers. 2018, 33, 2191–2199. [Google Scholar] [CrossRef]
- Jiang, X.; Li, Q.; Huang, W.; Cao, R. A Dual-Winding Fault-Tolerant Motor Drive System Based on the Redundancy Bridge Arm. IEEE Trans. Ind. Electron. 2019, 66, 654–662. [Google Scholar] [CrossRef]
- Mecrow, B.C.; Jack, A.G.; Atkinson, D.J.; Green, S.R.; Atkinson, G.J.; King, A.; Green, B. Design and testing of a four-phase fault-tolerant permanent-magnet machine for an engine fuel pump. IEEE Trans. Energy Convers. 2004, 19, 671–678. [Google Scholar] [CrossRef]
- Ursu, D.; Gradinaru, V.; Fahimi, B.; Boldea, I. Six-Phase BLDC Reluctance Machines: FEM-Based Characterization and Four-Quadrant Control. IEEE Trans. Ind. Appl. 2015, 51, 2105–2115. [Google Scholar] [CrossRef]
- Wang, S.; Zhan, Q.; Ma, Z.; Zhou, L. Implementation of a 50-kW four-phase switched reluctance motor drive system for hybrid electric vehicle. IEEE Trans. Magn. 2005, 41, 501–504. [Google Scholar] [CrossRef]
- Korkosz, M.; Bogusz, P.; Prokop, J. Modelling and experimental research of fault-tolerant dual-channel brushless DC motor. IET Electr. Power Appl. 2018, 12, 787–796. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | DCBLDC | DCSRM |
|---|---|---|
| Supply voltage | 25 V | 60 V |
| Reference current | 36.5 A | 8.5 A |
| Maximum speed on idle run | 10,000 r/min | 15,000 r/min |
| Base/rated speed | 7900/8000 r/min | 3000/8000 r/min |
| Base/rated torque | 1.0/0.5 N⋅m | 0.5/0.25 N⋅m |
| Number of phases | 3 | 3 |
| Number of stator slots | 12 | 12 |
| Number of rotor poles | 14 | 8 |
| Number of channels | 2 | 2 |
| Diameter of rotor | 47 mm (inner) | 45 mm (outer) |
| Core length | 28 mm | 28 mm |
| Winding configuration | Delta | Independent |
| Electrical steel | M230-23 | M470-50 |
| Permanent magnet | N42SH | - |
| Current density | 10 A/mm2 | 7 A/mm2 |
| Fill factor | 45% | 40% |
| Type of winding | concentrated | concentrated |
| Angle of stator pole | 28° | 15° |
| Angle of rotor pole | 20° | 18° |
| Total net mass | 0.5 kg | 1.5 kg |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korkosz, M.; Bogusz, P.; Prokop, J.; Pakla, B.; Podskarbi, G. Comparative Analysis of Fault-Tolerant Dual-Channel BLDC and SR Motors. Energies 2019, 12, 2489. https://doi.org/10.3390/en12132489
Korkosz M, Bogusz P, Prokop J, Pakla B, Podskarbi G. Comparative Analysis of Fault-Tolerant Dual-Channel BLDC and SR Motors. Energies. 2019; 12(13):2489. https://doi.org/10.3390/en12132489
Chicago/Turabian StyleKorkosz, M., P. Bogusz, J. Prokop, B. Pakla, and G. Podskarbi. 2019. "Comparative Analysis of Fault-Tolerant Dual-Channel BLDC and SR Motors" Energies 12, no. 13: 2489. https://doi.org/10.3390/en12132489
APA StyleKorkosz, M., Bogusz, P., Prokop, J., Pakla, B., & Podskarbi, G. (2019). Comparative Analysis of Fault-Tolerant Dual-Channel BLDC and SR Motors. Energies, 12(13), 2489. https://doi.org/10.3390/en12132489