Joint Point-Interval Prediction and Optimization of Wind Power Considering the Sequential Uncertainties of Stepwise Procedure


Abstract
1. Introduction
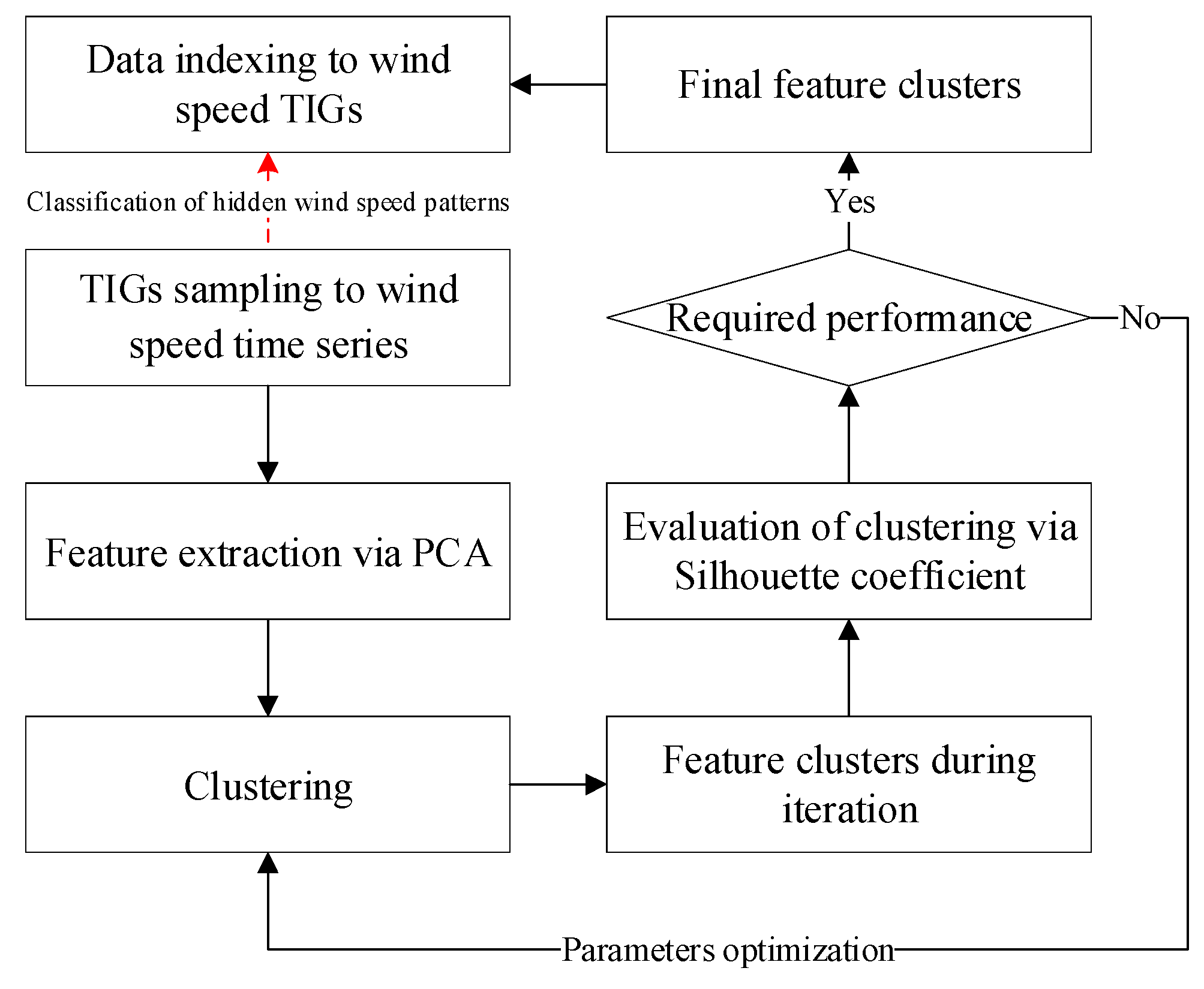
- The concept of TIG is defined to build an input-output matrix for ultra-short-term wind speed prediction. A PCA-clustering scheme is proposed to extract hidden wind patterns in TIGs.
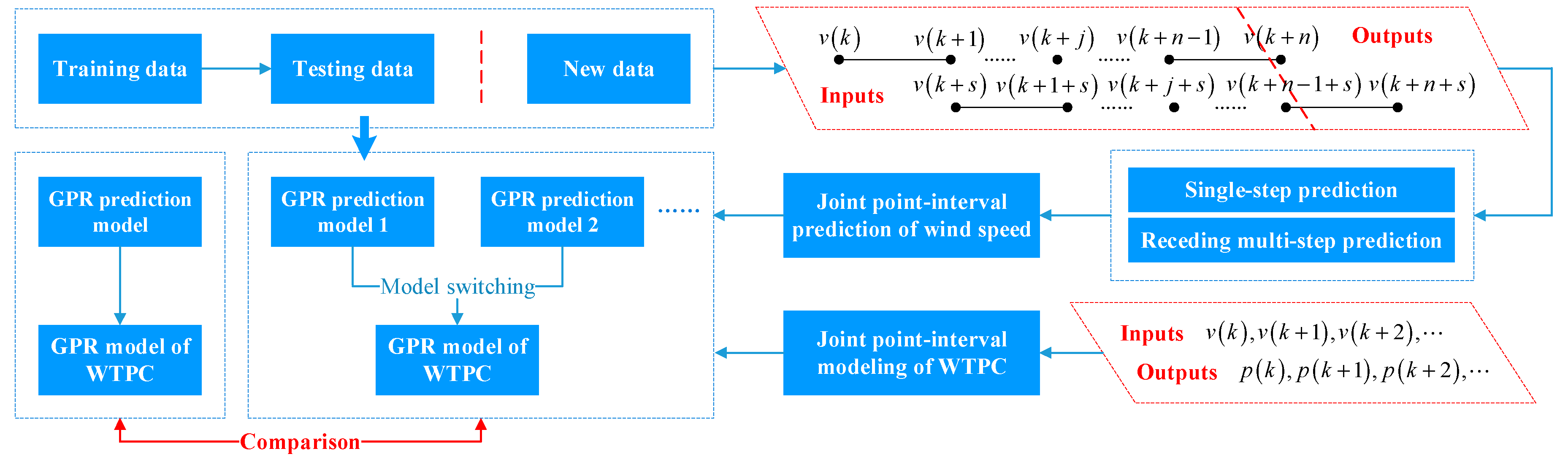
- Joint point-interval prediction of wind power is clearly claimed and studied via GPR. Theoretical support for uncertainty enlargement due to sequential uncertainties during stepwise procedure is deduced.
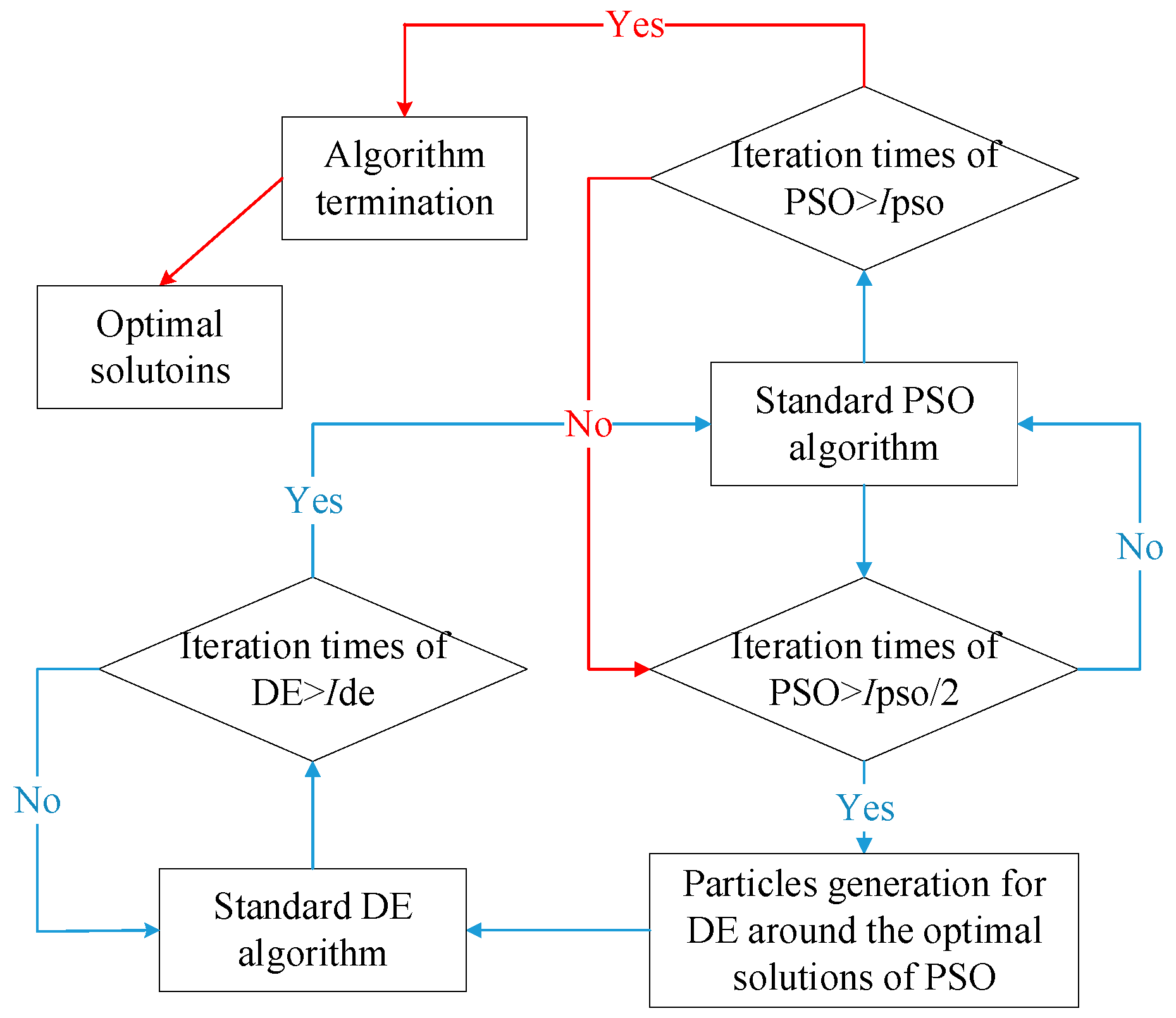
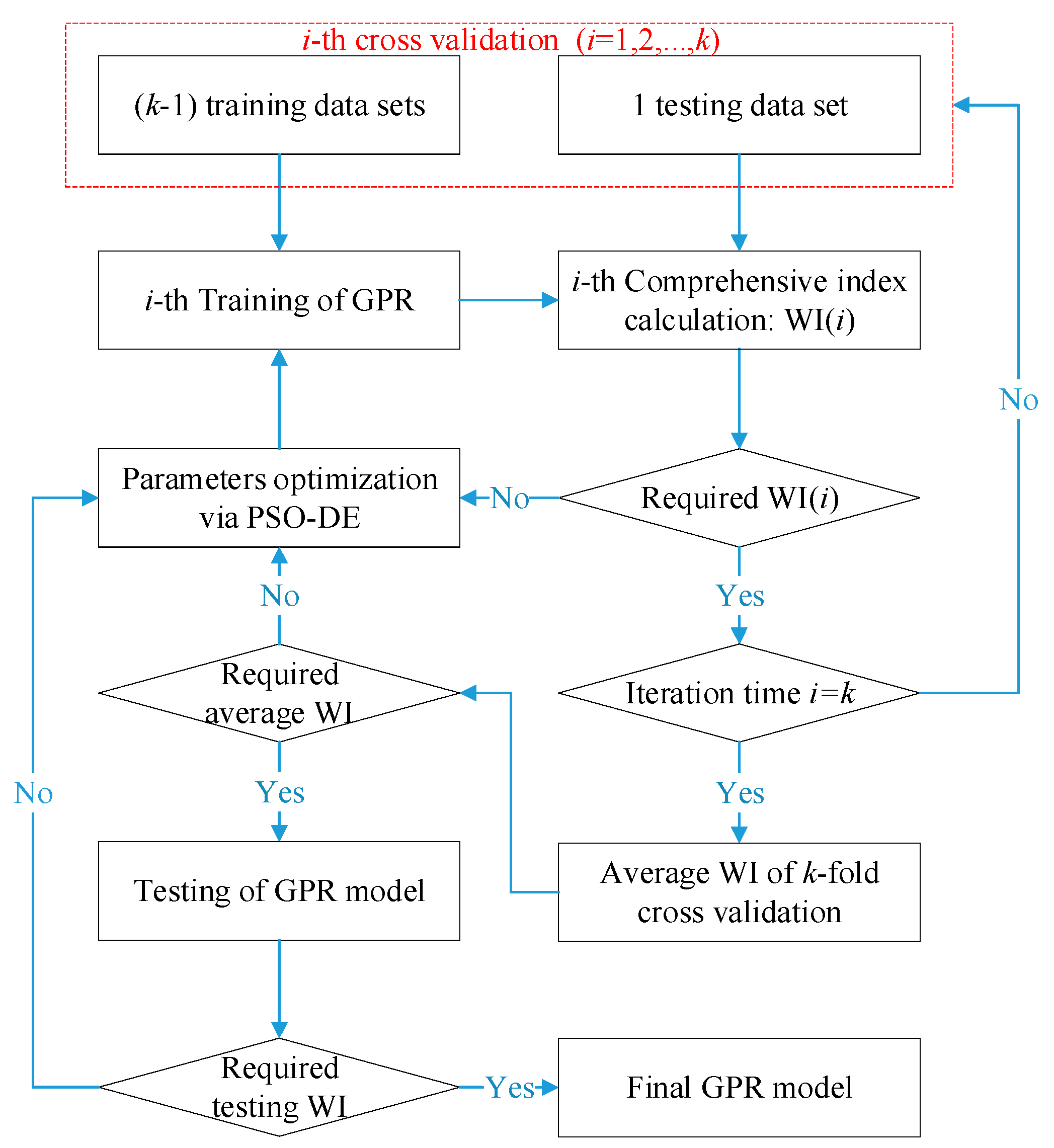
- Normalized and comprehensive evaluation indexes for joint point-interval estimation performance are defined systematically. Hybrid PSO-DE algorithm and K-CV method are used to obtain better and more stable performance.
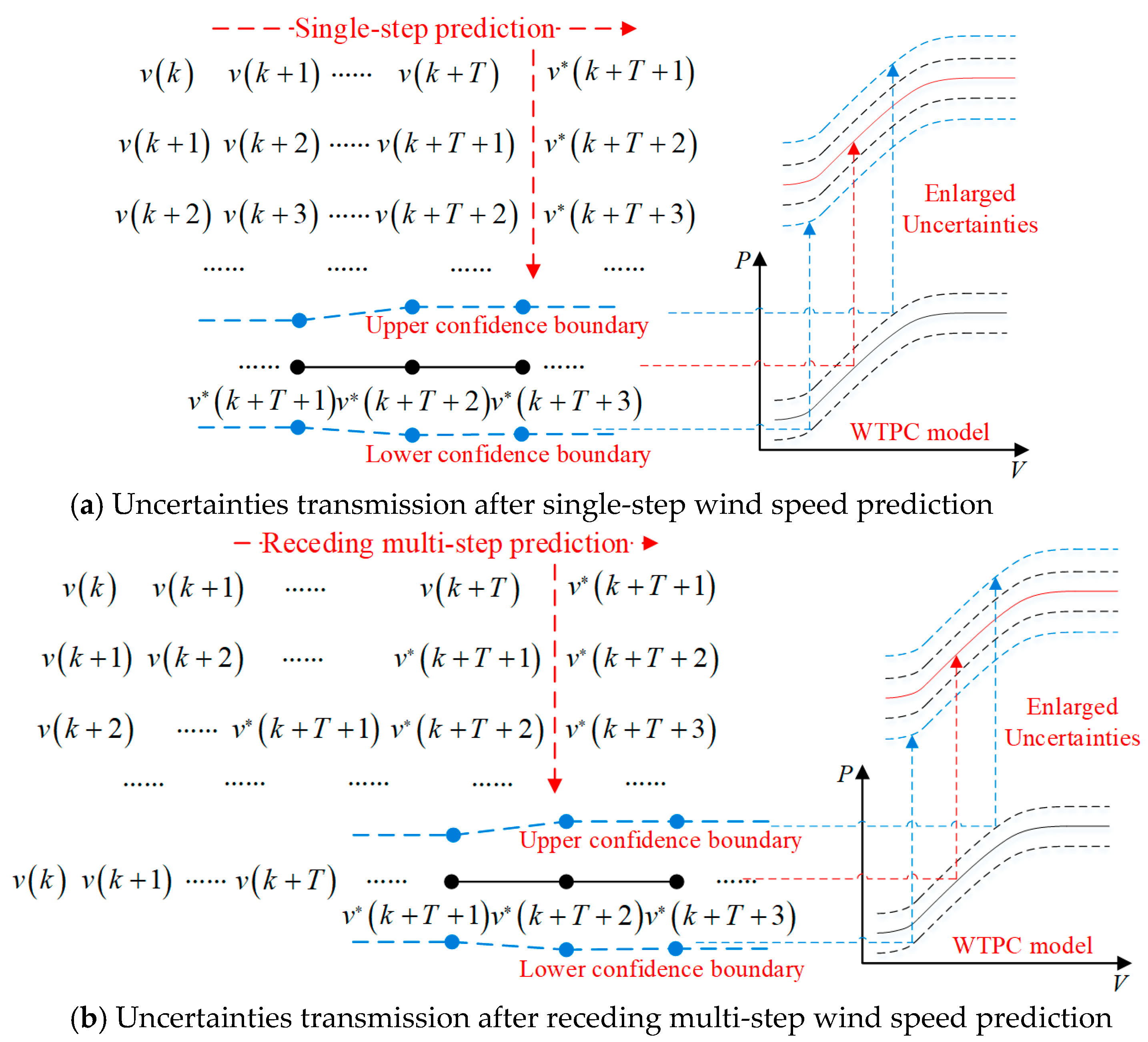
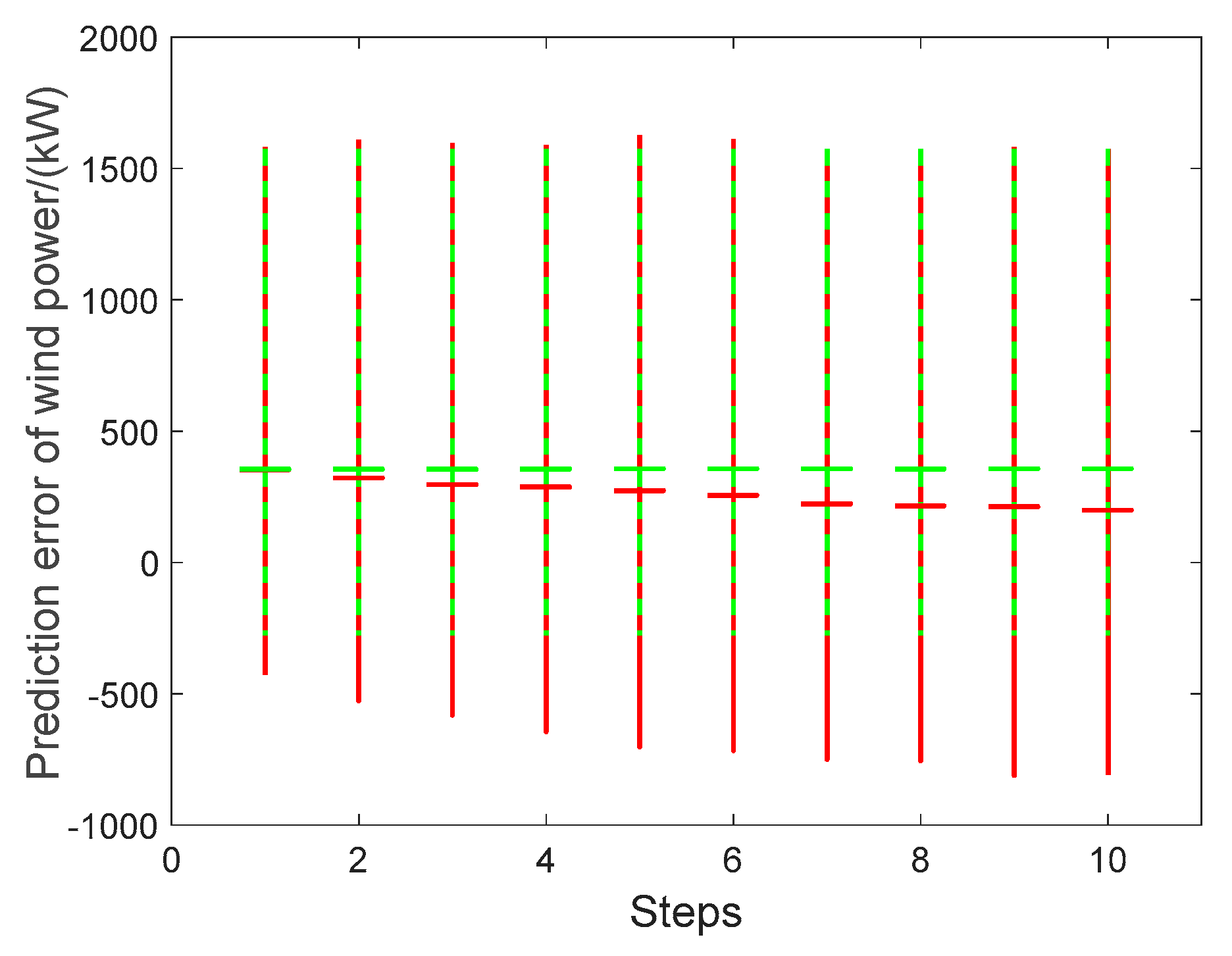
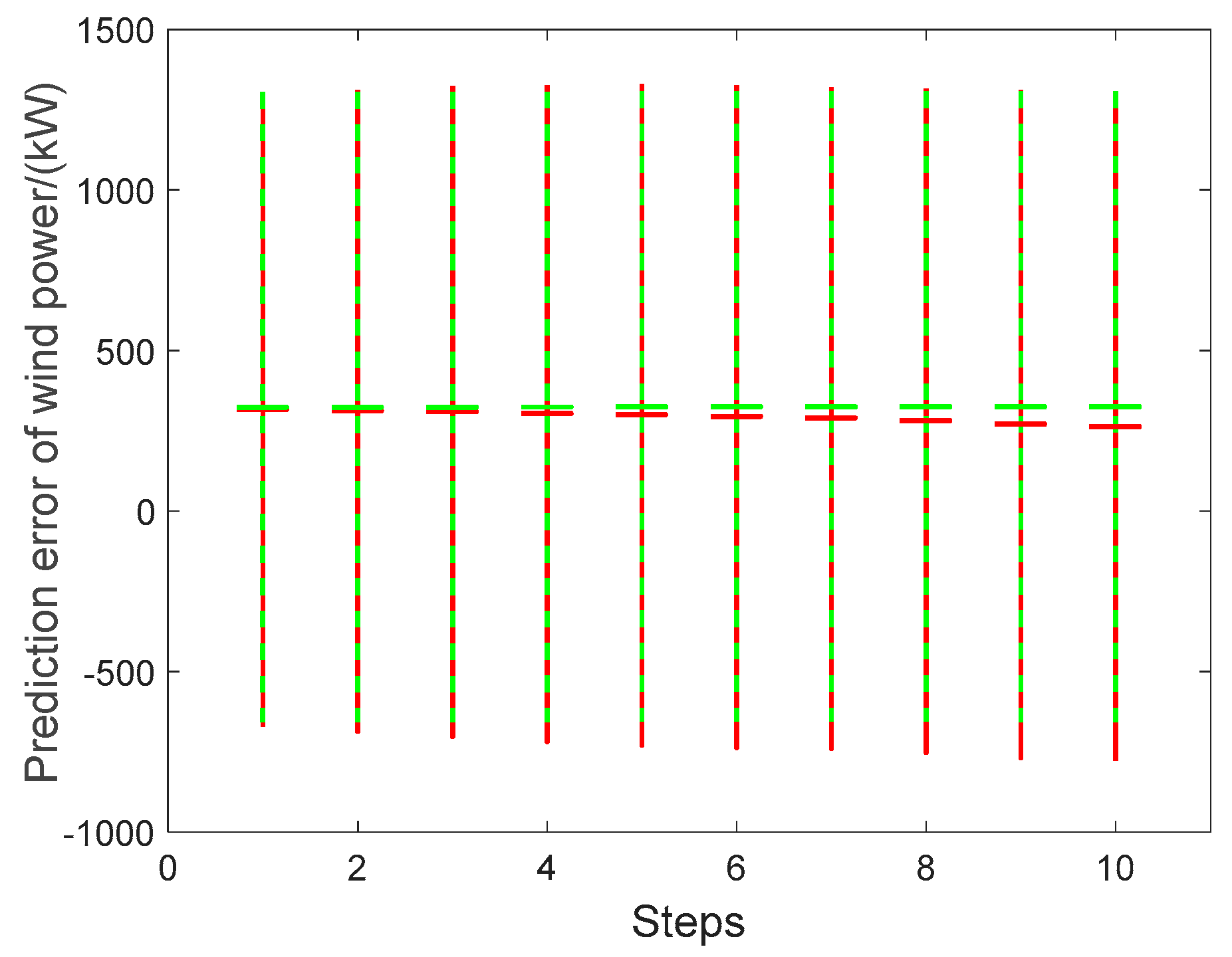
- After single-step or receding multi-step wind speed prediction, uncertainty enlargement effects during stepwise wind power prediction is revealed and validated using parametric and non-parametric interval modeling methods.
2. Establishment of Multi-Model Structure for Wind Speed Prediction
2.1. Formation of Input-Ouput Matrix
2.2. Feature Extraction of Hidden Wind Speed Patterns
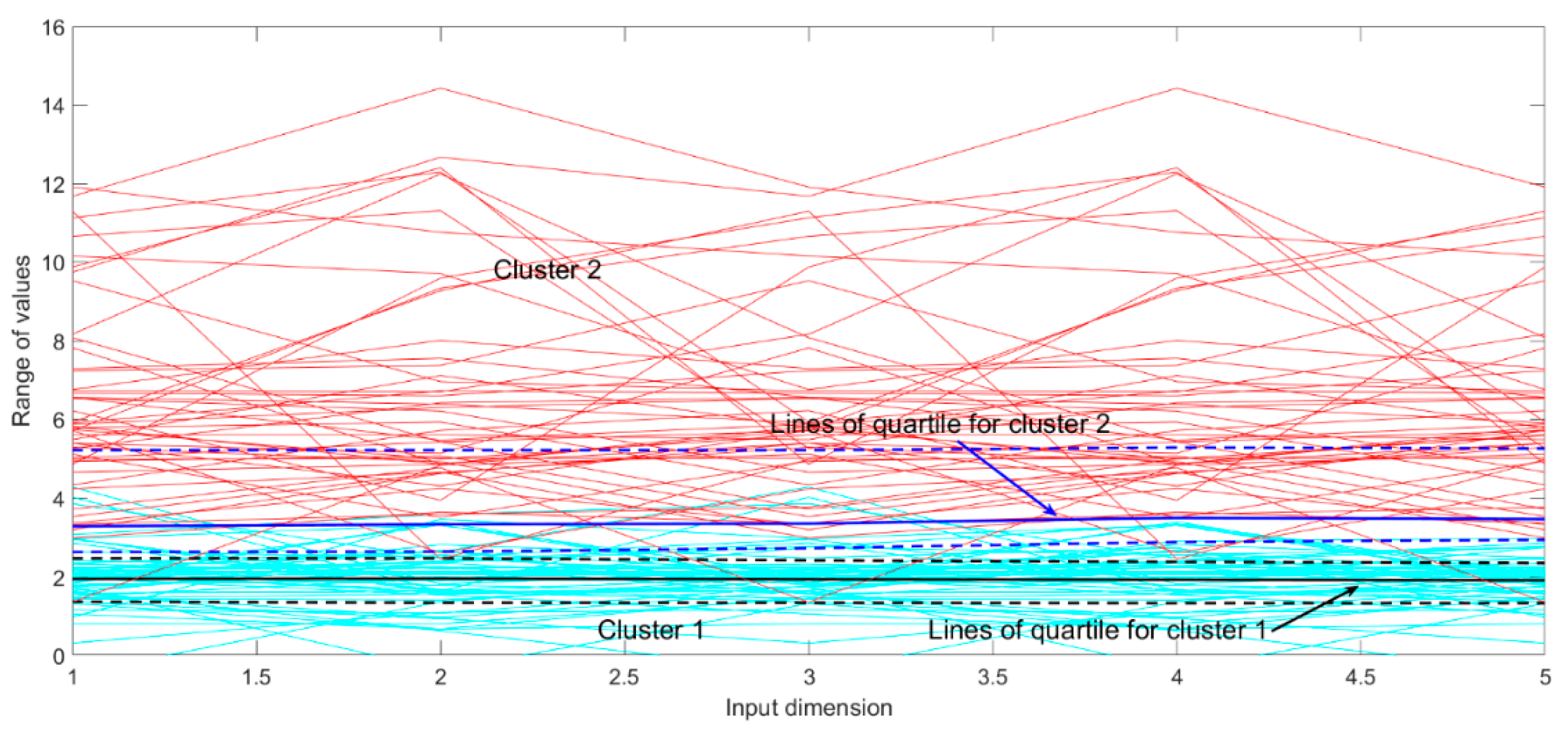
2.3. Classification of Extracted Features via Clustering
3. Joint Point-Interval Prediction of Wind Power via Stepwise Procedure
3.1. Joint Point-Interval Modeling
3.2. Sequential Uncertainties of Stepwise Procedure Based on Single-Step Prediction of Wind Speed
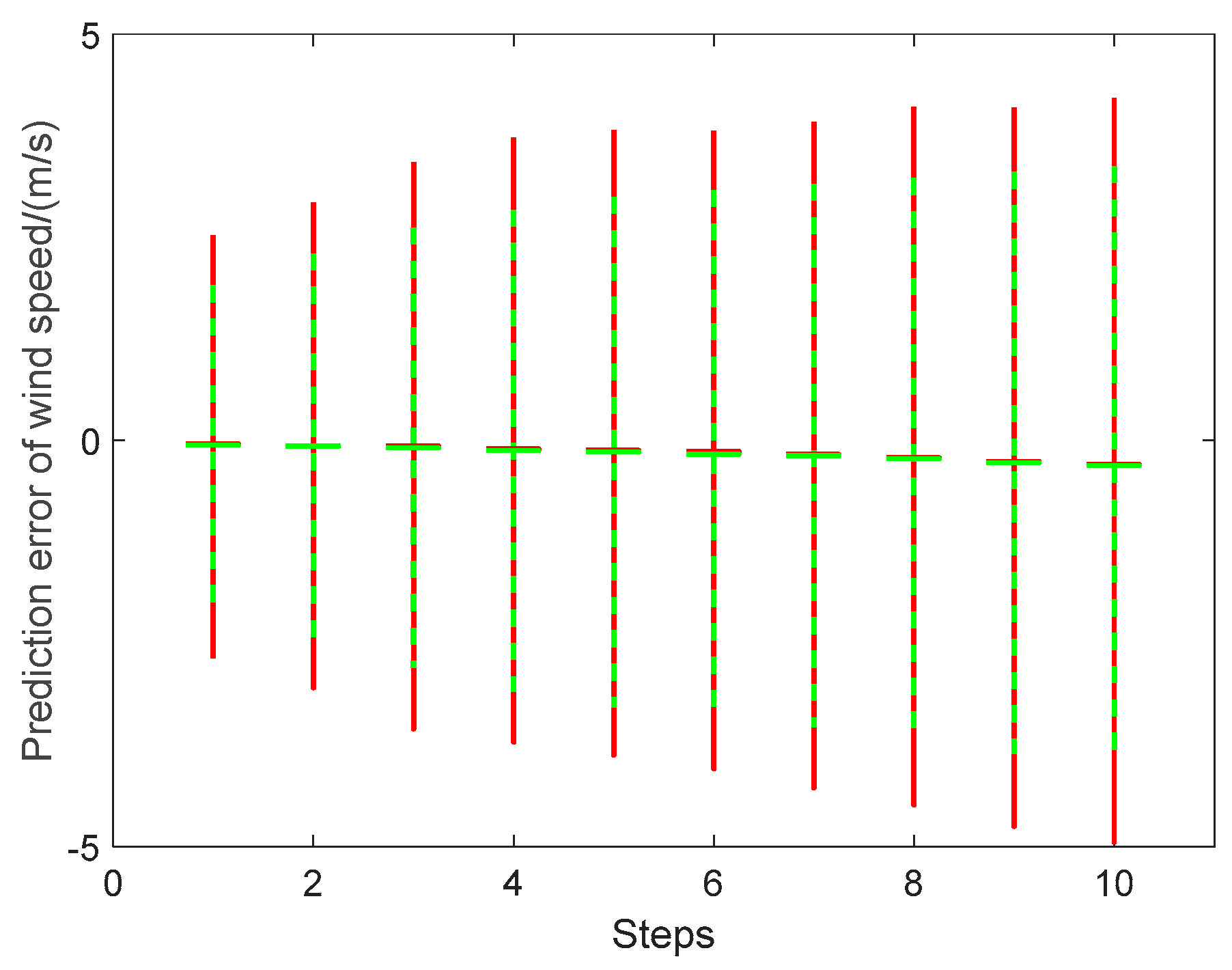
3.3. Sequential Uncertainties of Stepwise Procedure Based on Receding Multi-Step Prediction of Wind Speed
4. Evolutionary Prediction Mechanism
4.1. Prediction Performance Evaluation
4.2. Optimal Modeling, Corss Validation and Sliding Updation of Prediction Models
5. Simulations
5.1. Decision of TIG Length for Wind Speed Prediction
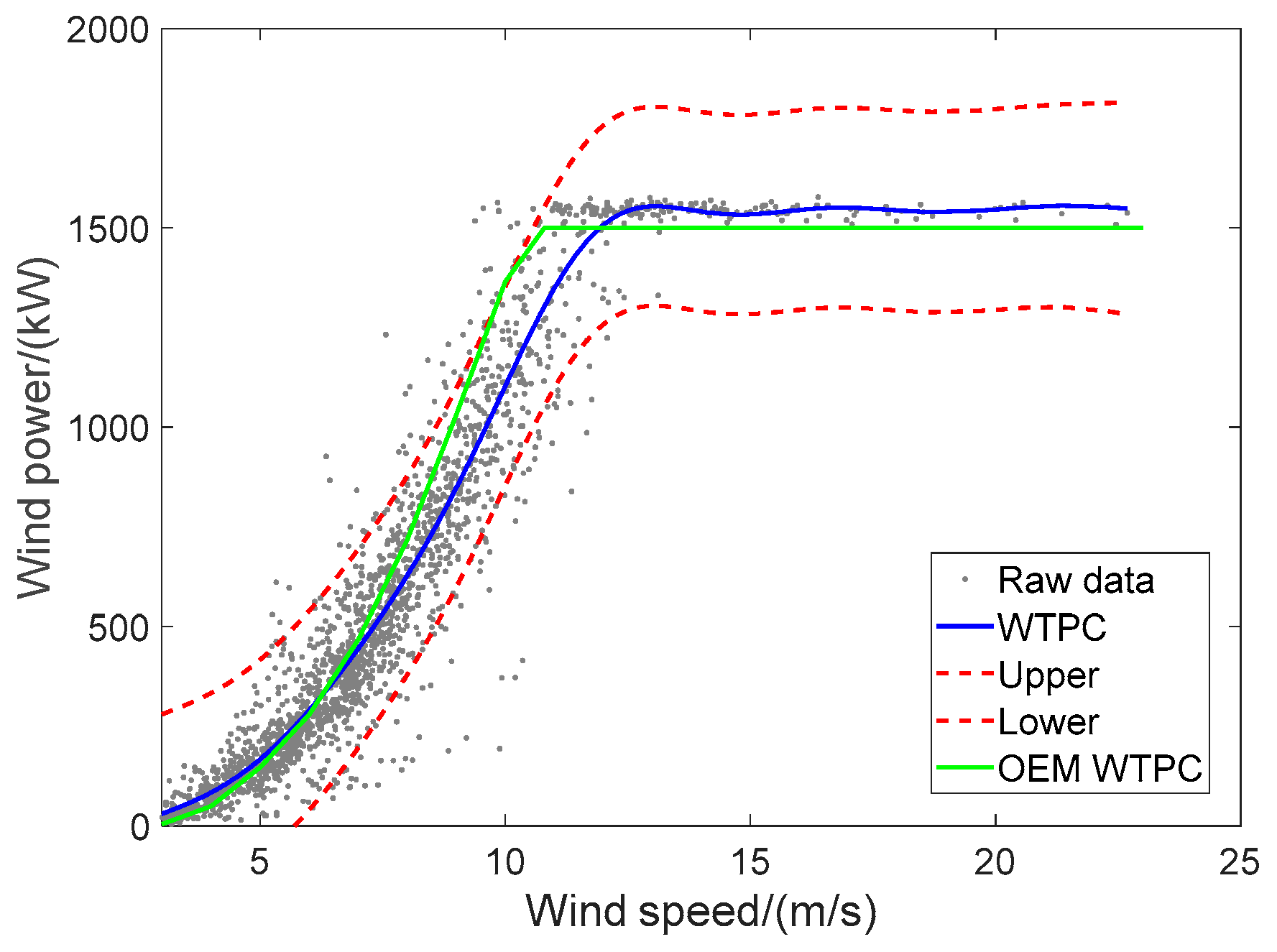
5.2. Necessity of Comprehensive Optimization Based on WI
5.3. Establishment and Testing of Multi-Model Structure via PCA-Clustering Scheme
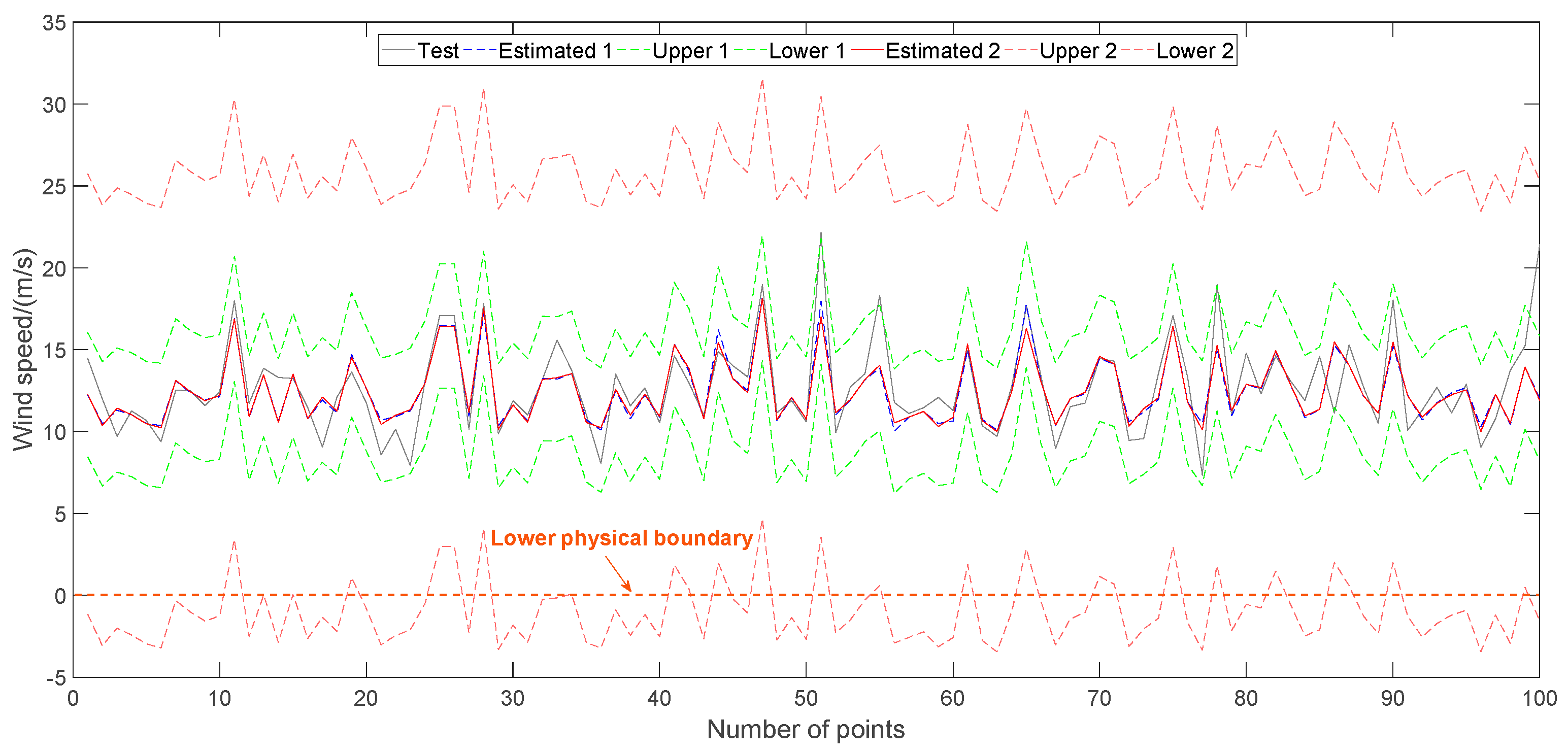
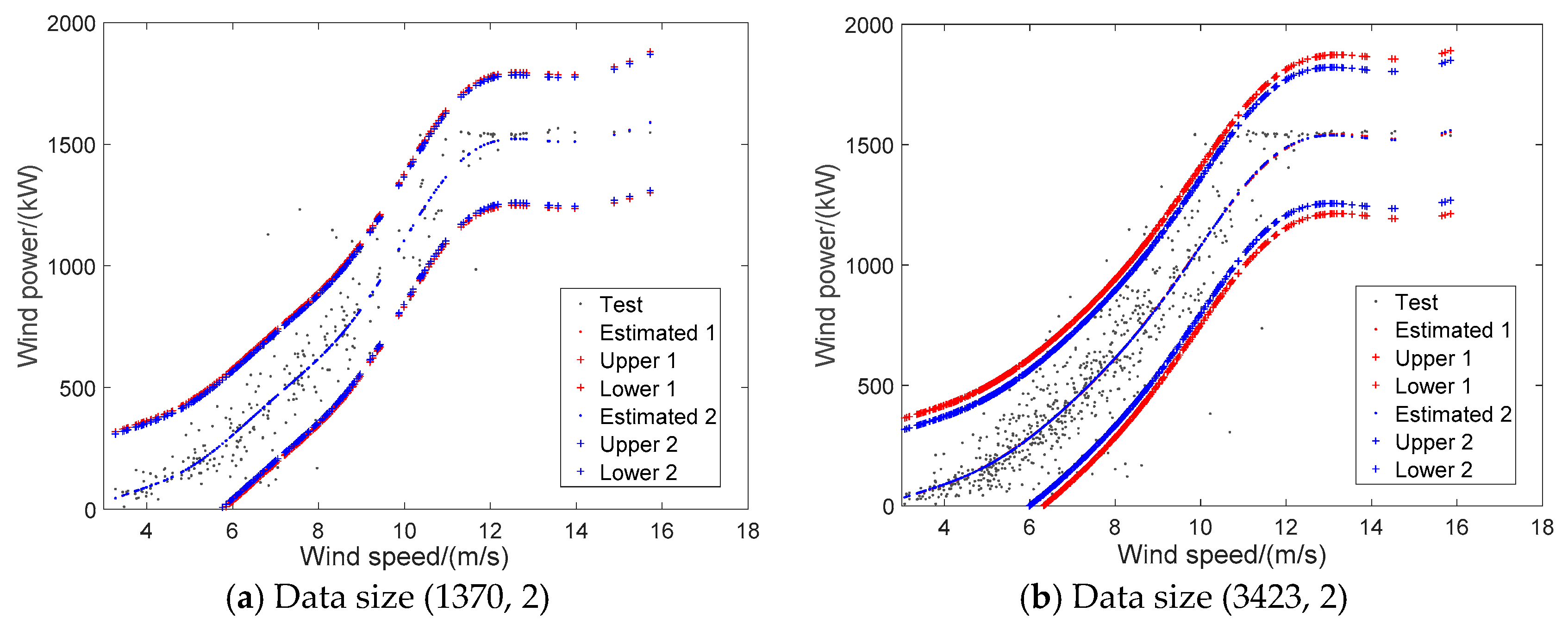
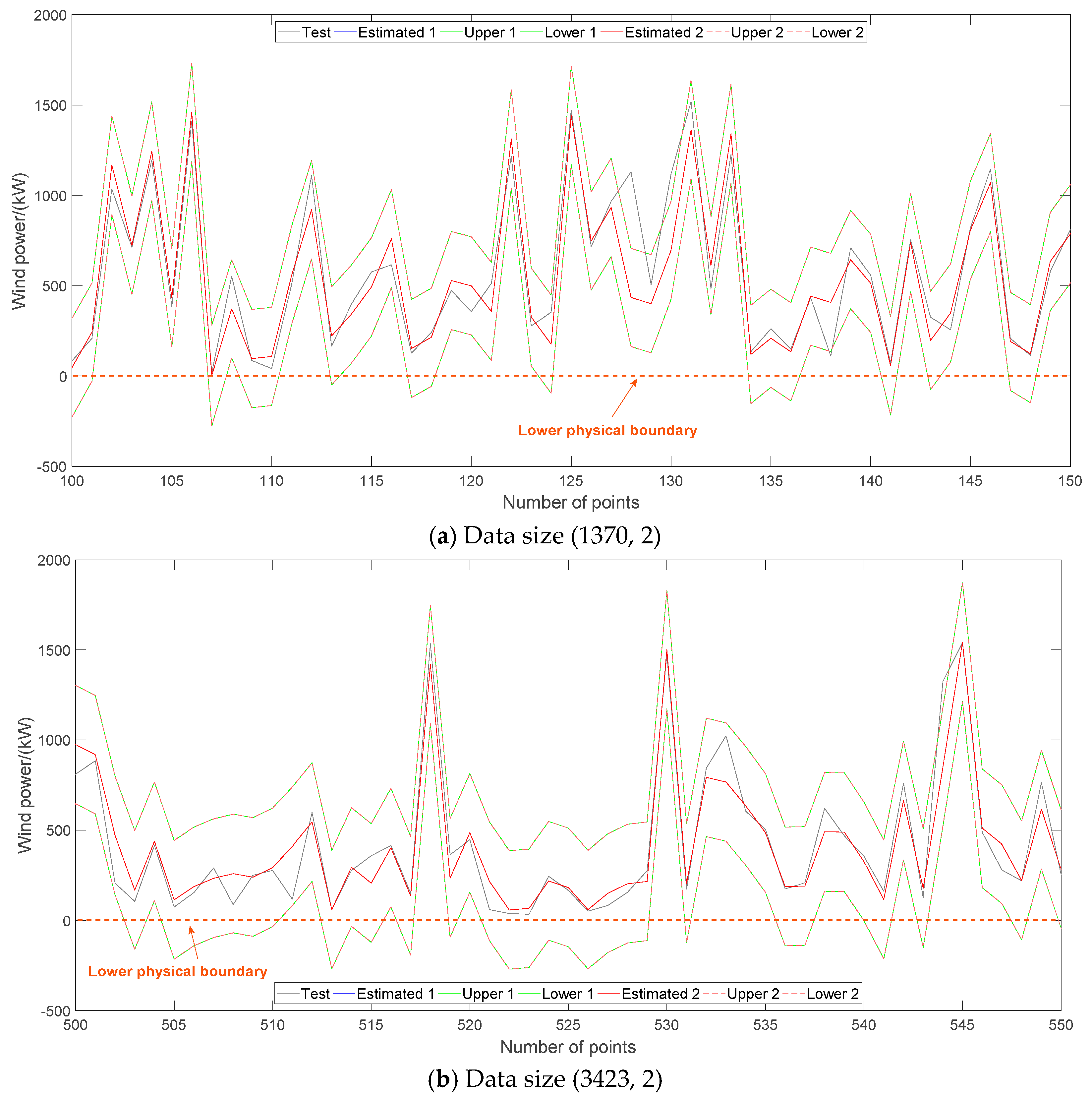
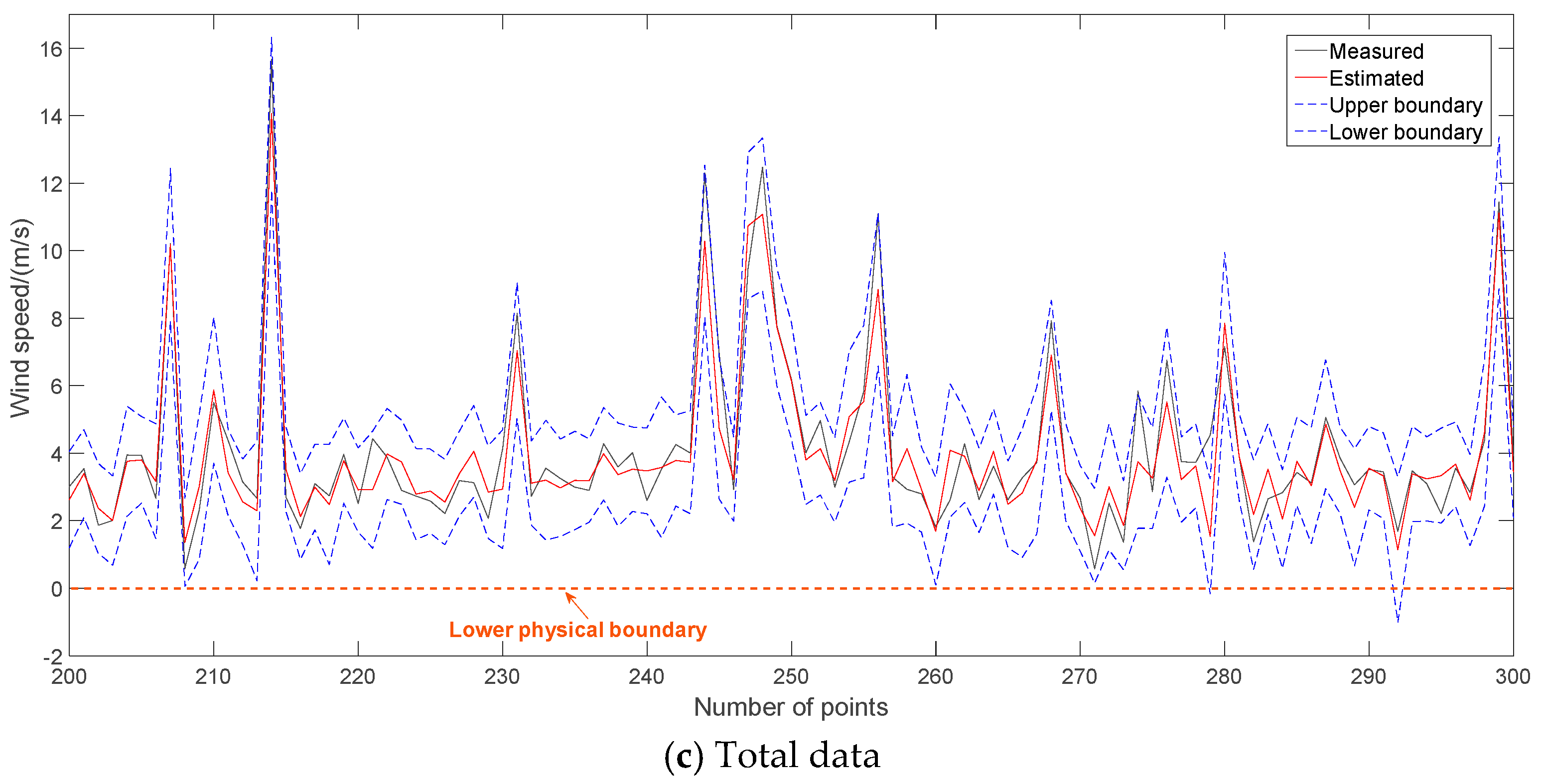
5.4. Wind Power Predcition Based on Single-Step Wind Speed Prediction Considering Sequential Uncertainties
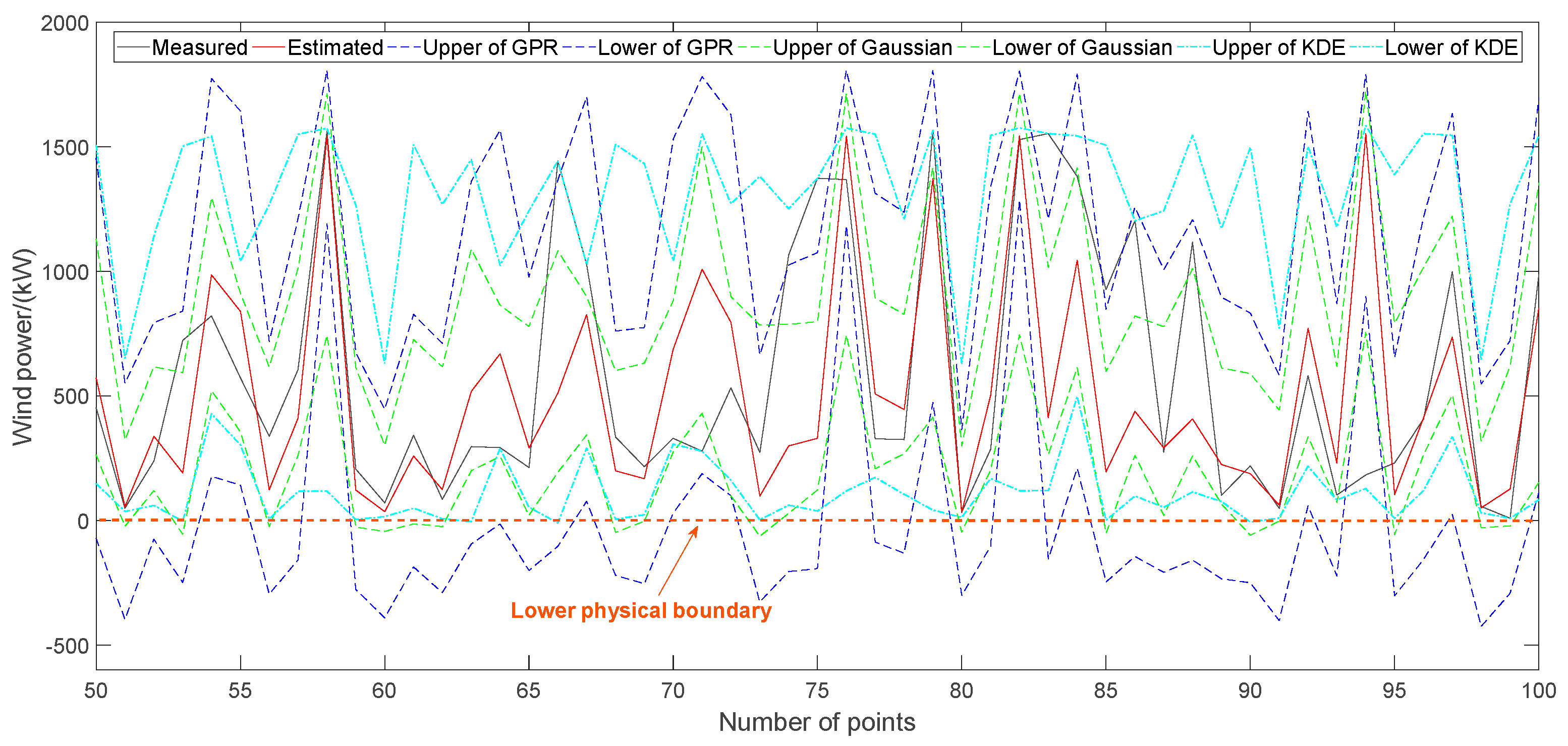
5.5. Wind Power Predcition Based on Multi-Step Wind Speed Prediction Considering Sequential Uncertainties
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- International Energy Agency. World Energy Outlook. 2018. Available online: https://www.iea.org/weo/ (accessed on 13 November 2018).
- Luca, F.; Stefano, C.; Gaetano, L. A procedure for deriving wind turbine noise limits by taking into account annoyance. Sci. Total Environ. 2019, 648, 728–736. [Google Scholar] [CrossRef]
- Luca, F.; Paolo, G.; Gaetano, L.; Stefano, C. Analytical assessment of wind turbine noise impact at receiver by means of residual noise determination without the wind farm shutdown. Noise Control Eng. J. 2017, 65, 417–433. [Google Scholar] [CrossRef]
- Michaud, D.S.; Feder, K.; Keith, S.E.; Voicescu, S.A. Exposure to wind turbine noise: Perceptual responses and reported health effects. J. Acoust. Soc. Am. 2016, 139, 1443–1454. [Google Scholar] [CrossRef] [PubMed]
- Hanning, C.D.; Evans, A. Wind turbine noise. Br. Med. J. 2012, 344, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Renani, E.T.; Elias, M.F.M.; Rahim, N.A. Using data-driven approach for wind power prediction: A comparative study. Energy Convers. Manag. 2016, 118, 193–203. [Google Scholar] [CrossRef]
- Giebel, G.; Brownsword, R.; Kariniotakis, G. The State-of-the-Art in Short-Term Prediction of Wind Power: A Literature Overview, 2nd ed.; RisØ National Laboratory: Roskilde, Denmark, 2016. [Google Scholar]
- Yesilbudak, M.; Sagiroglu, S.; Colak, I. A novel implementation of kNN classifier based on multi-tupled metrological input data for wind power prediction. Energy Convers. Manag. 2017, 135, 434–444. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, Q.; Srinivasan, D.; Wang, Z. Wind power curve modeling and wind power forecasting with inconsistent data. IEEE Trans. Sustain. Energy 2019, 10, 16–25. [Google Scholar] [CrossRef]
- Hu, Q.; Su, P.; Yu, D.; Liu, J. Pattern-based wind speed prediction based on generalized principle component analysis. IEEE Trans. Sustain. Energy 2014, 5, 866–874. [Google Scholar] [CrossRef]
- Zheng, W.; Peng, X.; Lu, D.; Zhang, D.; Liu, Y.; Lin, Z.; Lin, L. Composite quantile regression extreme learning machine with feature selection for short-term wind speed forecasting: A new approach. Energy Convers. Manag. 2017, 151, 737–752. [Google Scholar] [CrossRef]
- Hu, J.; Wang, J. Short-term wind speed prediction using empirical wavelet transform and Gaussian process regression. Energy 2015, 93, 1456–1466. [Google Scholar] [CrossRef]
- Fan, L.; Wei, Z.; Li, H.; Kowk, W.C.; Sun, G.; Sun, Y. Short-term wind speed interval prediction based on VMD and BA-RVM algorithm. Electr. Power Autom. Equip. 2017, 37, 93–100. [Google Scholar] [CrossRef]
- Naik, J.; Bisoi, R.; Dash, P.K. Prediction interval forecasting of wind speed and wind power using modes decomposition based low rank multi-kernel ridge regression. Renew. Energy 2018, 129, 357–383. [Google Scholar] [CrossRef]
- Shrivastava, N.A.; Lohia, K.; Panigrahi, B.K. A multiobjective framework for wind speed prediction interval forecasts. Renew. Energy 2016, 87, 903–910. [Google Scholar] [CrossRef]
- Chang, T.; Liu, F.; Ko, H.; Cheng, S.; Sun, L.; Kuo, S. Comparative analysis on power curve models of wind turbine generator in estimation capacity factor. Energy 2014, 73, 88–95. [Google Scholar] [CrossRef]
- Lydia, M.; Kumar, S.S.; Selvakumar, A.I.; Kumar, G.E.P. A comprehensive review on wind turbine power curve modeling techniques. Renew. Sustain. Energy Rev. 2014, 30, 452–460. [Google Scholar] [CrossRef]
- Villanueva, D.; Feijóo, A. Normal-based model for true power curves of wind turbines. IEEE Trans. Sustain. Energy 2016, 7, 1005–1011. [Google Scholar] [CrossRef]
- Jeon, J.; Taylor, J.W. Using conditional kernel density estimation for wind power density forecasting. J. Am. Stat. Assoc. 2012, 107, 66–79. [Google Scholar] [CrossRef]
- Bai, G.; Fleck, B.; Zuo, M.J. A stochastic power curve for wind turbines with reduced variability using conditional Copula. Wind Energy 2016, 19, 1519–1534. [Google Scholar] [CrossRef]
- Hu, Y.; Qiao, Y.; Liu, J.; Zhu, H. Adaptive confidence boundary modeling of wind turbine power curve using SCADA data and its application. IEEE Trans. Sustain. Energy 2018, 1–12. [Google Scholar] [CrossRef]
- Yan, J.; Zhang, H.; Liu, Y.; Han, S.; Li, L. Uncertainty estimation for wind energy conversion by probabilistic wind turbine power curve modeling. Appl. Energy 2019, 239, 1356–1370. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, J.; Wang, X. Review on probabilistic forecasting of wind power generation. Renew. Sustain. Energy Rev. 2014, 32, 255–270. [Google Scholar] [CrossRef]
- Hong, T.; Pinson, P.; Fan, S.; Zareipour, H.; Troccoli, A.; Hyndman, R.J. Probabilistic energy forecasting: Global energy forecasting competition 2014 and beyond. Int. J. Forecast. 2016, 32, 896–913. [Google Scholar] [CrossRef]
- Liu, H.; Shi, J.; Erdem, E. An integrated wind power forecasting methodology: Interval estimation of wind speed, operation probability of wind turbine, and conditional expected wind power output of a wind farm. Int. J. Green Energy 2012, 151–176. [Google Scholar] [CrossRef]
- Zhang, N.; Kang, C.; Xia, Q.; Liang, J. Modeling conditional forecast error for wind power in generation scheduling. IEEE Trans. Power Syst. 2014, 29, 1316–1324. [Google Scholar] [CrossRef]
- Cui, M.; Krishnan, V.; Hodge, B.M.; Zhang, J. A copula-based conditional probabilistic forecast model for wind power ramps. IEEE Trans. Smart Grid 2018, 1–13. [Google Scholar] [CrossRef]
- Hotelling, H. Analysis of a complex of statistical variables into principle components. J. Educ. Psychol. 1933, 24, 417–441, 498–520. [Google Scholar] [CrossRef]
- Rousseeuw, P.J. Silhouettes: A graphical aid to the interpretation and validation of cluster analysis. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006; ISBN 0-471-24195-4. [Google Scholar]
- Wan, C.; Zhao, X.; Pinson, P.; Zhao, Y.D.; Wong, K.P. Optimal prediction intervals of wind power generation. IEEE Trans. Power Syst. 2014, 29, 1166–1174. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, X.; He, X. New hybrid optimization based on differential evolution and particle swarm optimization. Comput. Eng. Appl. 2012, 48, 46–48. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TIG Length | Random Samples | Optimized Parameters | Performance Indexes | |||||
|---|---|---|---|---|---|---|---|---|
| σ | σl | σf | NRMSE | NMACE | NPIAW | WI | ||
| 2 | L2-1 | 1.1564 | 0.09192 | 0.00169 | 0.1468 | 0.00526 | 0.4533 | 0.2018 |
| L2-2 | 1.1560 | 0.07273 | 0.10779 | 0.1452 | 0.01053 | 0.4549 | 0.2035 | |
| 3 | L3-1 | 1.0806 | 3.9444 | 0.000956 | 0.1613 | 0.04474 | 0.4236 | 0.2099 |
| L3-2 | 1.0850 | 83.1602 | 0.000781 | 0.1619 | 0.02105 | 0.4253 | 0.2027 | |
| 4 | L4-1 | 1.0740 | 536.06 | 0.000851 | 0.1430 | 0.00526 | 0.4210 | 0.1897 |
| L4-2 | 1.0694 | 0.91602 | 0.08969 | 0.1430 | 0.00789 | 0.4204 | 0.1904 | |
| 5 | L5-1 | 1.0426 | 119.52 | 0.000734 | 0.1552 | 0.03158 | 0.4087 | 0.1985 |
| L5-2 | 1.0607 | 1179.44 | 0.000895 | 0.1481 | 0.01052 | 0.4158 | 0.1915 | |
| 6 | L6-1 | 1.2150 | 873.459 | 0.000783 | 0.1494 | 0.00789 | 0.4763 | 0.2112 |
| L6-2 | 1.2190 | 204.195 | 0.000865 | 0.1506 | 0.00789 | 0.4778 | 0.2121 | |
| 7 | L7-1 | 1.2311 | 28.9316 | 0.000918 | 0.1570 | 0.01053 | 0.4826 | 0.2167 |
| L7-2 | 1.0223 | 0.8123 | 0.7536 | 0.1510 | 0.01053 | 0.4798 | 0.2138 | |
| 8 | L8-1 | 0.5993 | 0.70918 | 1.041235 | 0.1663 | 0.03421 | 0.4408 | 0.2138 |
| L8-2 | 0.8865 | 1.1093 | 0.8553 | 0.1597 | 0.03157 | 0.4429 | 0.2114 | |
| 9 | L9-1 | 1.2181 | 6.3960 | 0.000851 | 0.1536 | 0.00789 | 0.4775 | 0.2130 |
| L9-2 | 1.2093 | 380.198 | 0.000758 | 0.1603 | 0.02368 | 0.4740 | 0.2193 | |
| 10 | L10-1 | 1.2253 | 29.1164 | 0.000759 | 0.1554 | 0.00789 | 0.4803 | 0.2145 |
| L10-2 | 1.2280 | 2.01771 | 0.184676 | 0.1448 | 0.01842 | 0.4856 | 0.2163 | |
| Random Samples | Optimization Objective | Optimized Parameters | Performance Indexes | |||||
|---|---|---|---|---|---|---|---|---|
| σ | σl | σf | NRMSE | NMACE | NPIAW | WI | ||
| (780, 6) | WI | 2.0798 | 166.27 | 284.98 | 0.1295 | 0.0122 | 0.7598 | 0.3005 |
| MSE | 6.8617 | 27.977 | 0.000996 | 0.1290 | 0.0526 | 2.6897 | 0.9571 | |
| Random Samples | Optimization Objective | Optimization Parameters | Performance Indexes | |||||
|---|---|---|---|---|---|---|---|---|
| σ | σl | σf | NRMSE | NMACE | NPIAW | WI | ||
| (1370, 2) | WI | 133.2455 | 1.9152 | 143.2515 | 0.2189 | 0.0050 | 0.2651 | 0.1620 |
| MSE | 138.33 | 1.9146 | 143.0111 | 0.2189 | 0.0050 | 0.2721 | 0.1653 | |
| (3423, 2) | WI | 143.3569 | 2.3008 | 152.1538 | 0.2626 | 0.0142 | 0.2814 | 0.1860 |
| MSE | 167.4033 | 2.5602 | 165.6770 | 0.2625 | 0.0142 | 0.3285 | 0.2017 | |
| Methods | K-medoids | ADAP | |||||
| Index | 2 clusters | 3 clusters | 4 clusters | 5 clusters | 6 clusters | 2 clusters | 3 clusters |
| Silhouette | 0.7220 | 0.3473 | 0.3575 | 0.2588 | 0.2153 | 0.7799 | 0.6525 |
| Time | <20 s Quick | >10000 s Slow | |||||
| Methods | FCM | GMM | |||||
| Index | 2 clusters | 3 clusters | 4 clusters | 5 clusters | 2 clusters | 3 clusters | 4 clusters |
| Silhouette | 0.7293 | 0.3184 | 0.2679 | 0.2147 | 0.5680 | 0.2063 | 0.0785 |
| Time | <10 s Quick | <10 s Quick | |||||
| Random Samples | Times | Optimization Parameters | Performance Indexes | ||||||
|---|---|---|---|---|---|---|---|---|---|
| σ | σl | σf | RMSE | NRMSE | NMACE | NPIAW | WI | ||
| Cluster-1 (4234,6) | 1 | 0.7219 | 1.1268 | 0.3520 | 0.6325 | 0.3818 | 0.025258 | 0.2869 | 0.2313 |
| 2 | 0.6064 | 0.3655 | 0.5584 | 0.6588 | 0.3742 | 0.005350 | 0.2796 | 0.2197 | |
| 3 | 0.6294 | 1.0015 | 0.3658 | 0.6698 | 0.3647 | 0.000373 | 0.2519 | 0.2057 | |
| 4 | 0.6101 | 0.4217 | 0.3471 | 0.8464 | 0.4484 | 0.010825 | 0.2578 | 0.2390 | |
| 5 | 0.6829 | 1.8947 | 0.4298 | 0.7931 | 0.3336 | 0.000871 | 0.2698 | 0.2014 | |
| Cluster-2 (2066,6) | 1 | 1.0193 | 1.9435 | 1.5418 | 1.2576 | 0.2735 | 0.011852 | 0.4446 | 0.2433 |
| 2 | 0.9857 | 1.9320 | 1.6313 | 1.1745 | 0.2803 | 0.003441 | 0.4245 | 0.2360 | |
| 3 | 1.0269 | 2.1178 | 1.4200 | 1.4358 | 0.2832 | 0.011087 | 0.4384 | 0.2442 | |
| 4 | 0.8811 | 1.4874 | 1.3745 | 1.2065 | 0.3518 | 0.041672 | 0.3954 | 0.2630 | |
| 5 | 0.9822 | 1.7217 | 1.6009 | 1.2893 | 0.2695 | 0.018733 | 0.4370 | 0.2417 | |
| Total (6300,6) | 1 | 0.8342 | 2.3355 | 1.8551 | 0.8451 | 0.3202 | 0.004177 | 0.3443 | 0.2229 |
| 2 | 0.6184 | 0.5578 | 0.9751 | 0.8724 | 0.3235 | 0.010025 | 0.3086 | 0.2140 | |
| 3 | 0.7938 | 2.0179 | 1.5322 | 0.9158 | 0.3033 | 0.014202 | 0.3263 | 0.2146 | |
| 4 | 0.7384 | 2.1607 | 1.7623 | 0.9053 | 0.4066 | 0.005848 | 0.3045 | 0.2390 | |
| 5 | 0.8454 | 2.4428 | 1.5523 | 1.0933 | 0.3669 | 0.000835 | 0.3436 | 0.2371 | |
| Methods | Performance Indexes | |
|---|---|---|
| NMACE | NPIAW | |
| GPR | 0.0312 | 0.6068 |
| Gaussian | 0.0259 | 0.5794 |
| KDE | 0.0456 | 0.5838 |
| Receding Steps | Gaussian Method | KDE Method | ||||
|---|---|---|---|---|---|---|
| Upper | Mean | Lower | Upper | Mean | Lower | |
| 1 | 1.9071 | −0.0587 | −2.0245 | 2.5248 | −0.0416 | −2.6812 |
| 2 | 2.3004 | −0.0741 | −2.4485 | 2.9303 | −0.0695 | −3.0427 |
| 3 | 2.6170 | −0.0916 | −2.8003 | 3.4249 | −0.0694 | −3.5492 |
| 4 | 2.8391 | −0.1259 | −3.0909 | 3.7236 | −0.1066 | −3.7120 |
| 5 | 2.9961 | −0.1430 | −3.2820 | 3.8218 | −0.1213 | −3.8728 |
| 6 | 3.0798 | −0.1697 | −3.4192 | 3.8080 | −0.1352 | −4.0416 |
| 7 | 3.1556 | −0.1874 | −3.5303 | 3.9207 | −0.1723 | −4.2776 |
| 8 | 3.2287 | −0.2271 | −3.6830 | 4.1085 | −0.2151 | −4.4877 |
| 9 | 3.3026 | −0.2761 | −3.8548 | 4.0988 | −0.2607 | −4.7499 |
| 10 | 3.3753 | −0.3102 | −3.9958 | 4.2173 | −0.2960 | −4.9651 |
| Receding Steps | Actual Wind Speed as Input | Receding Estimated Wind Speed as Input | ||||
|---|---|---|---|---|---|---|
| Upper | Mean | Lower | Upper | Mean | Lower | |
| 1 | 1573.84 | 355.5108 | −277.125 | 1582.31 | 354.4456 | −426.759 |
| 2 | 1573.84 | 355.8727 | −277.125 | 1609.30 | 322.1044 | −525.343 |
| 3 | 1573.84 | 355.7339 | −277.125 | 1595.81 | 297.4987 | −580.823 |
| 4 | 1573.84 | 356.6082 | −277.125 | 1588.10 | 288.1762 | −643.325 |
| 5 | 1573.84 | 357.346 | −277.125 | 1627.56 | 274.2639 | −701.065 |
| 6 | 1573.84 | 357.201 | −277.125 | 1611.99 | 256.0331 | −715.514 |
| 7 | 1573.84 | 357.2376 | −277.125 | 1569.09 | 224.0202 | −748.357 |
| 8 | 1573.84 | 357.1051 | −277.125 | 1569.47 | 216.0828 | −755.082 |
| 9 | 1573.84 | 357.2038 | −277.125 | 1580.90 | 212.9505 | −810.312 |
| 10 | 1573.84 | 357.4078 | −277.125 | 1573.22 | 199.5166 | −808.562 |
| Receding Steps | Actual Wind Speed as Input | Receding Estimated Wind Speed as Input | ||||
|---|---|---|---|---|---|---|
| Upper | Mean | Lower | Upper | Mean | Lower | |
| 1 | 1304.56 | 323.2525 | −658.057 | 1303.55 | 316.2105 | −671.133 |
| 2 | 1304.62 | 323.5818 | −657.451 | 1311.53 | 312.5622 | −686.406 |
| 3 | 1304.59 | 323.7301 | −657.132 | 1323.09 | 310.3886 | −702.311 |
| 4 | 1305.31 | 324.3319 | −656.648 | 1326.33 | 304.285 | −717.755 |
| 5 | 1306.23 | 325.0672 | −656.091 | 1330.17 | 300.4417 | −729.289 |
| 6 | 1306.21 | 325.0333 | −656.144 | 1326.20 | 294.7158 | −736.765 |
| 7 | 1306.24 | 325.0669 | −656.102 | 1319.32 | 289.9321 | −739.457 |
| 8 | 1306.23 | 325.0319 | −656.165 | 1314.50 | 281.0818 | −752.339 |
| 9 | 1306.23 | 324.9214 | −656.386 | 1310.19 | 270.8341 | −768.52 |
| 10 | 1306.23 | 324.8822 | −656.468 | 1301.94 | 262.7157 | −776.504 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Qiao, Y.; Chu, J.; Yuan, L.; Pan, L. Joint Point-Interval Prediction and Optimization of Wind Power Considering the Sequential Uncertainties of Stepwise Procedure. Energies 2019, 12, 2205. https://doi.org/10.3390/en12112205
Hu Y, Qiao Y, Chu J, Yuan L, Pan L. Joint Point-Interval Prediction and Optimization of Wind Power Considering the Sequential Uncertainties of Stepwise Procedure. Energies. 2019; 12(11):2205. https://doi.org/10.3390/en12112205
Chicago/Turabian StyleHu, Yang, Yilin Qiao, Jingchun Chu, Ling Yuan, and Lei Pan. 2019. "Joint Point-Interval Prediction and Optimization of Wind Power Considering the Sequential Uncertainties of Stepwise Procedure" Energies 12, no. 11: 2205. https://doi.org/10.3390/en12112205
APA StyleHu, Y., Qiao, Y., Chu, J., Yuan, L., & Pan, L. (2019). Joint Point-Interval Prediction and Optimization of Wind Power Considering the Sequential Uncertainties of Stepwise Procedure. Energies, 12(11), 2205. https://doi.org/10.3390/en12112205