Reduced-Order DC Terminal Dynamic Model for Multi-Port AC-DC Power Electronic Transformer


Abstract
1. Introduction
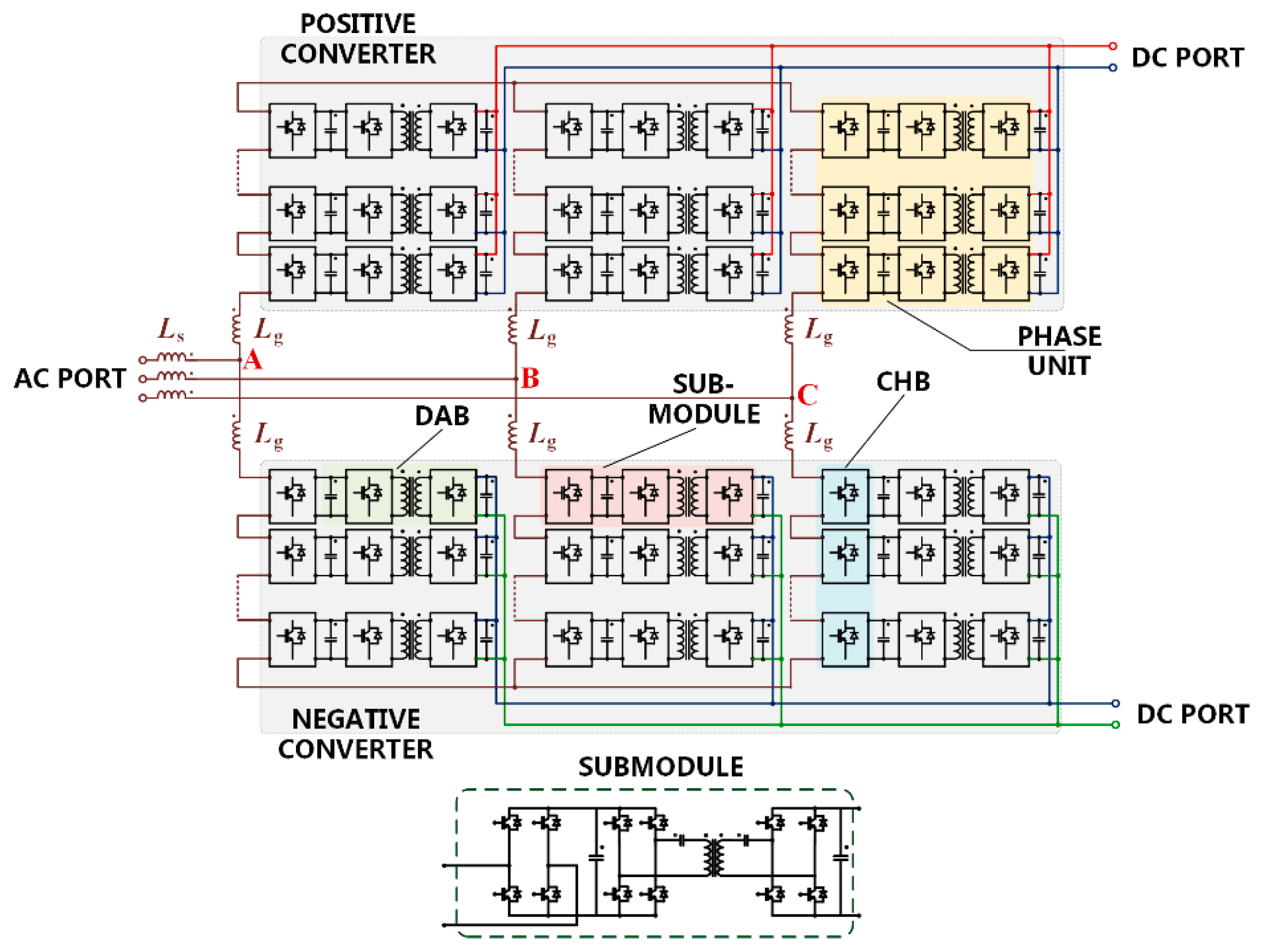
2. The Full-Order Small-Signal Model of MP-PET
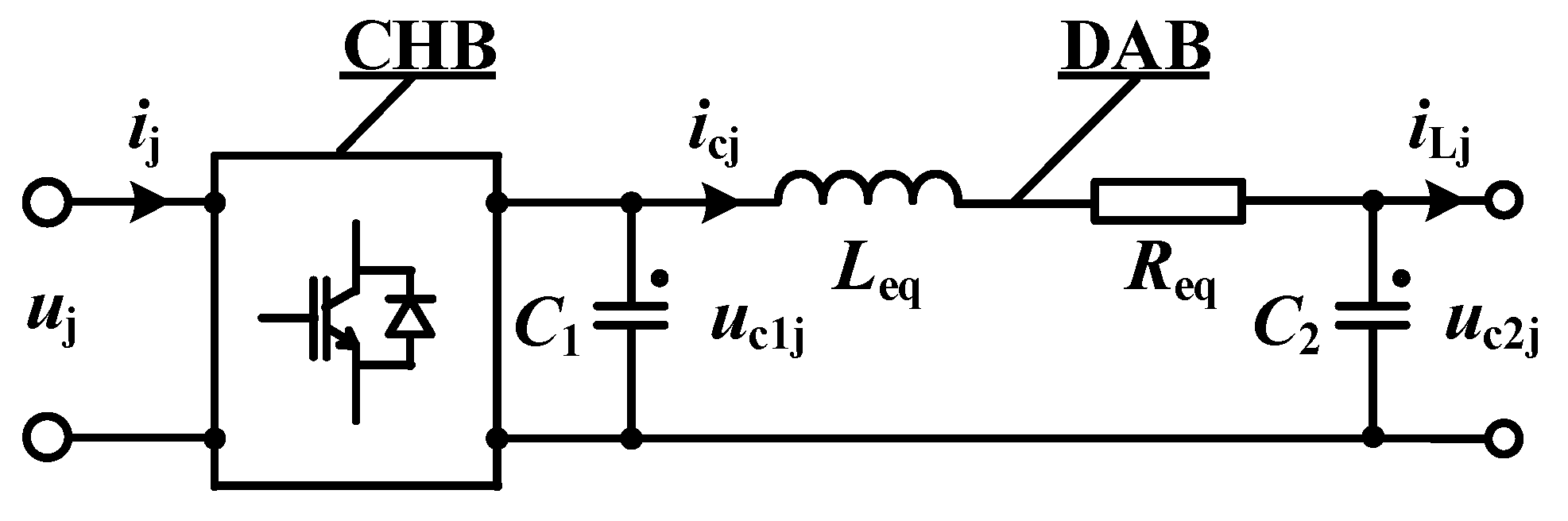
2.1. PET Small Signal Modeling Analysis
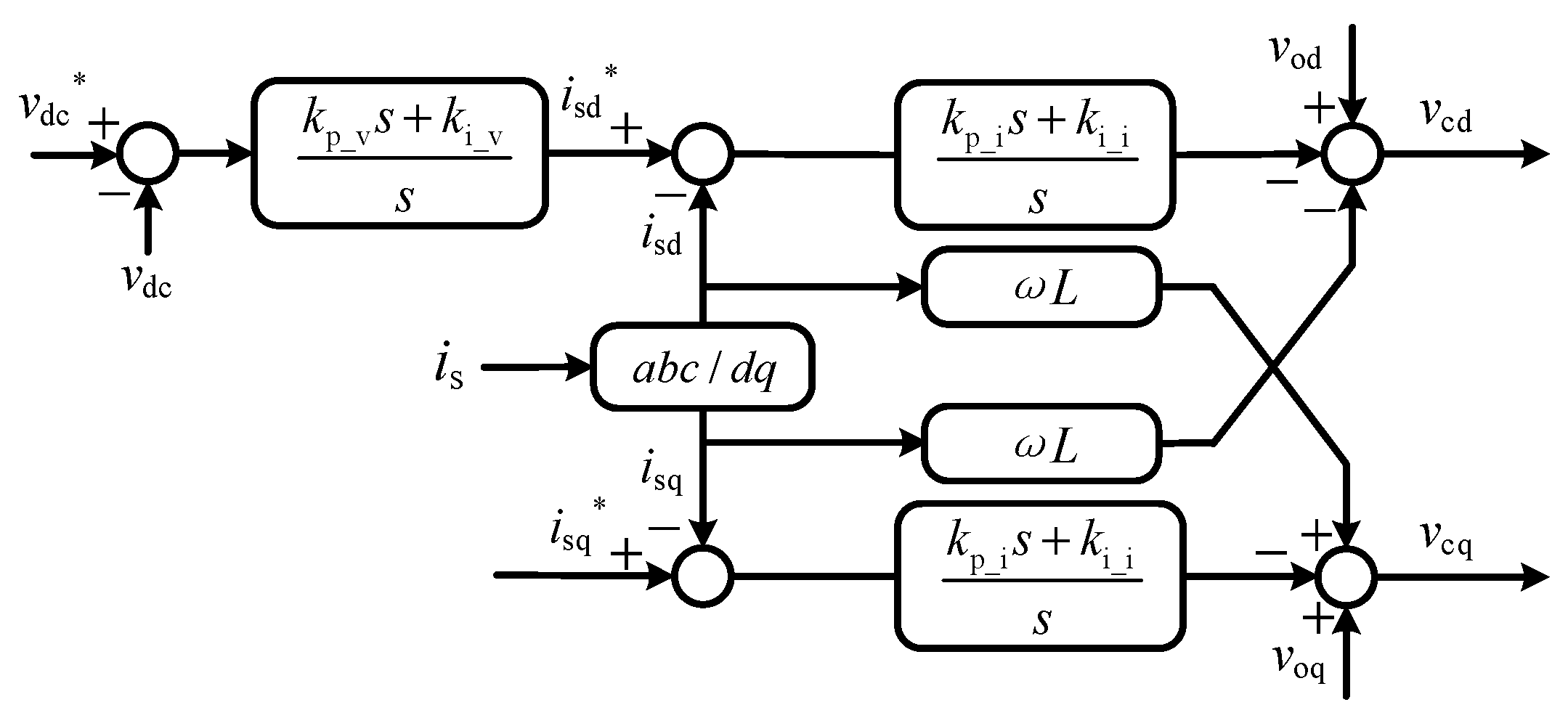
2.2. Control system Small Signal Modeling Analysis
3. The Reduced-Order Small-Signal Model of MP-PET
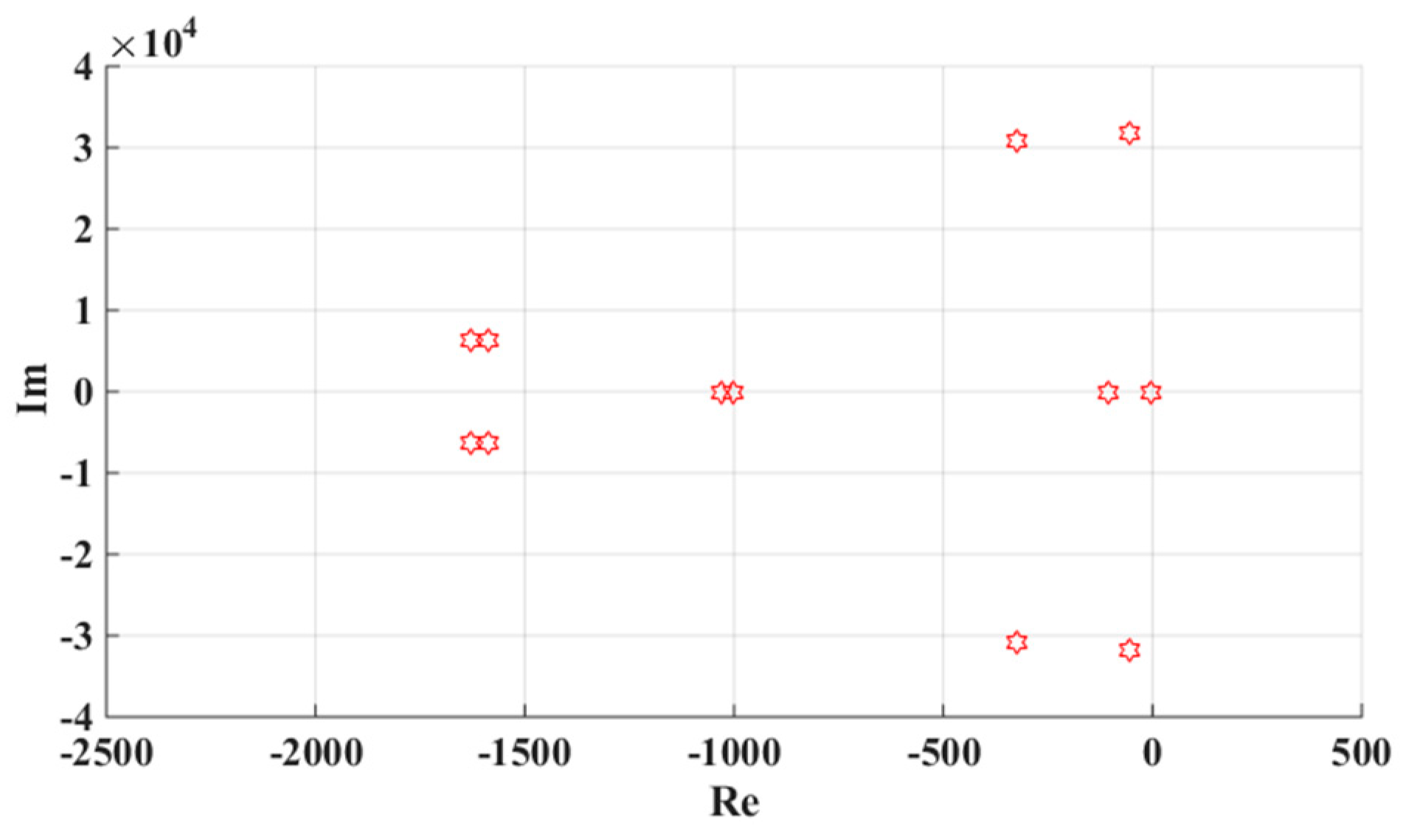
3.1. PET Small Signal Model Eigenvalue Analysis
3.2. PET Small Signal Model Simplification
4. Simulation Results
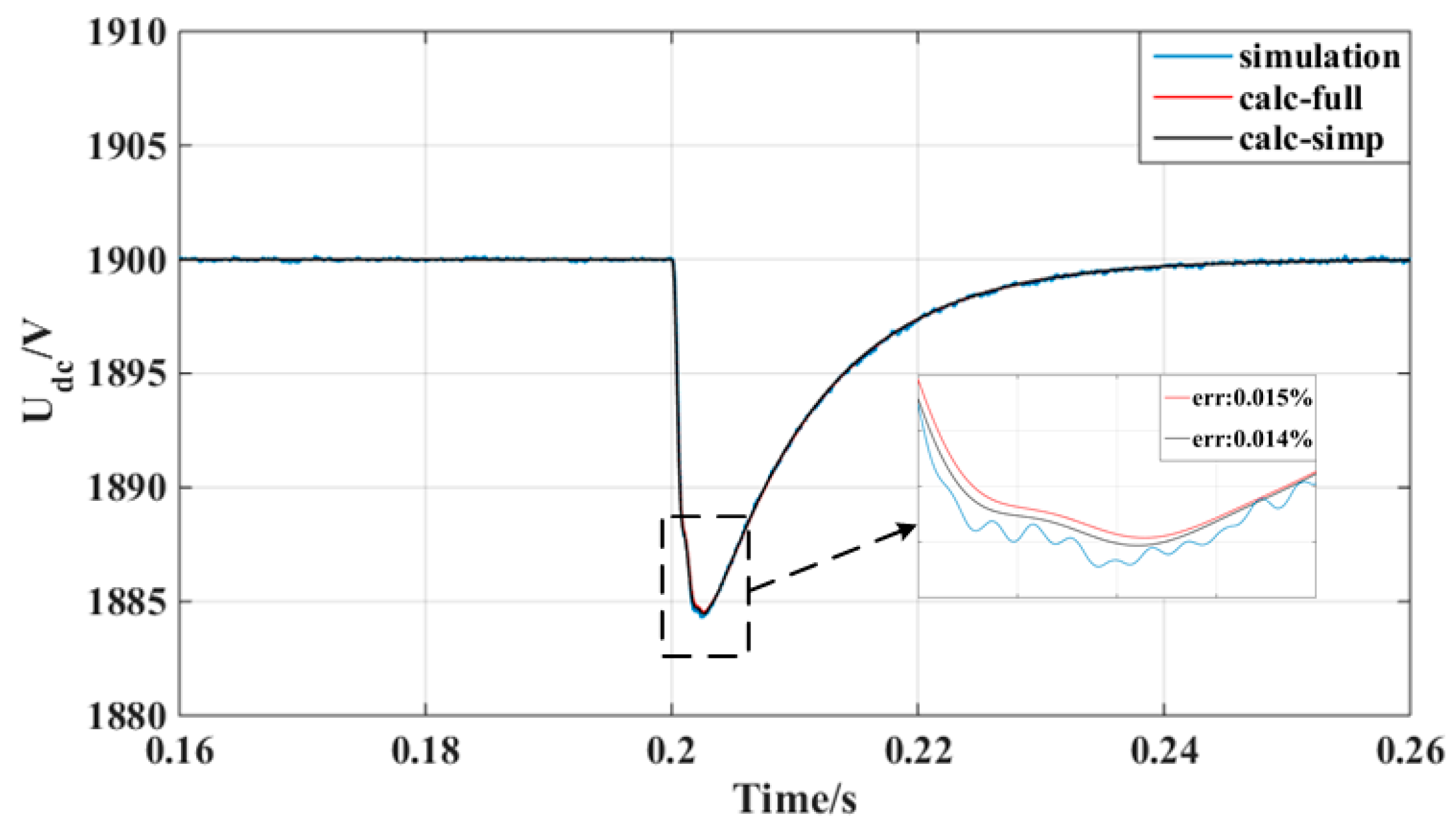
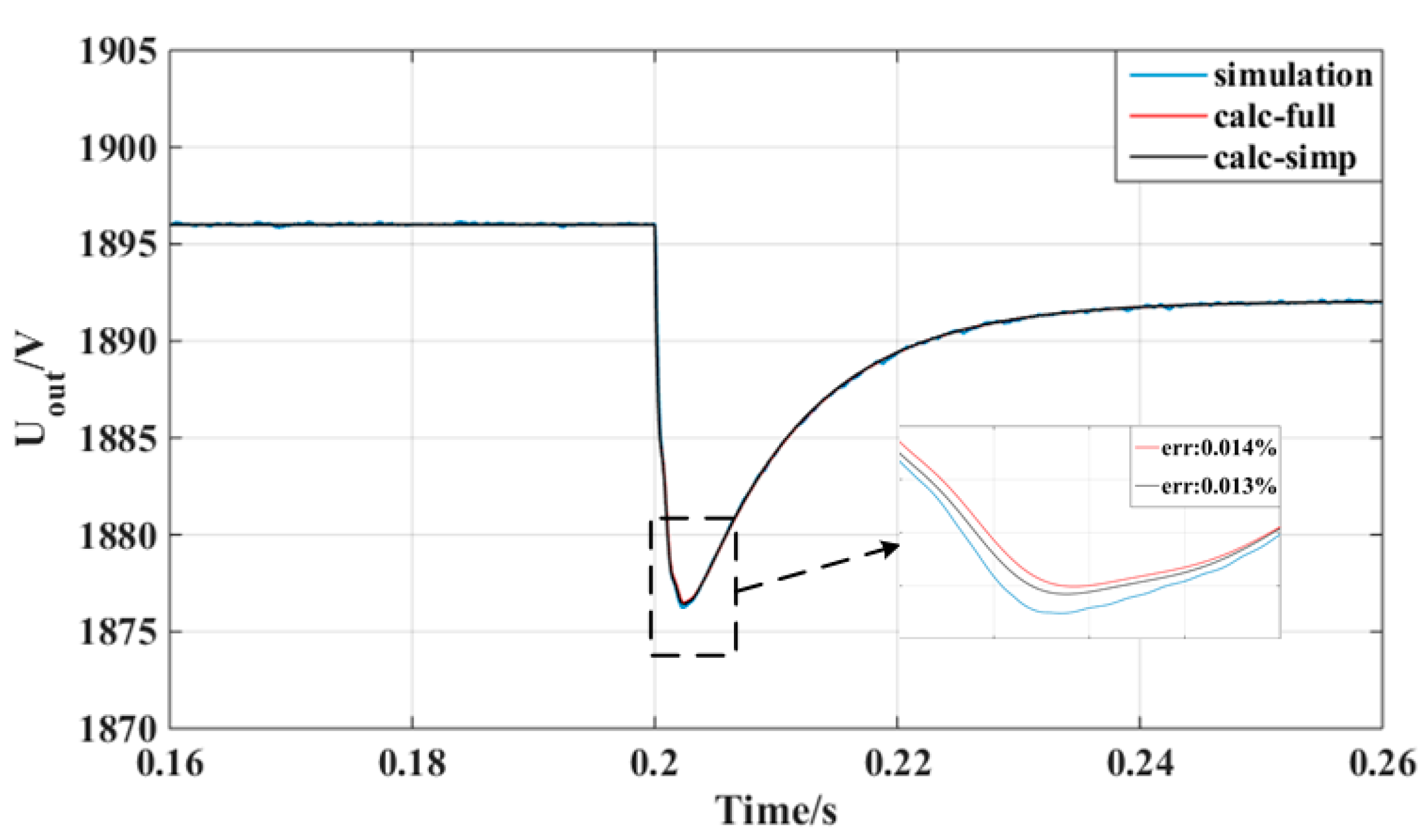
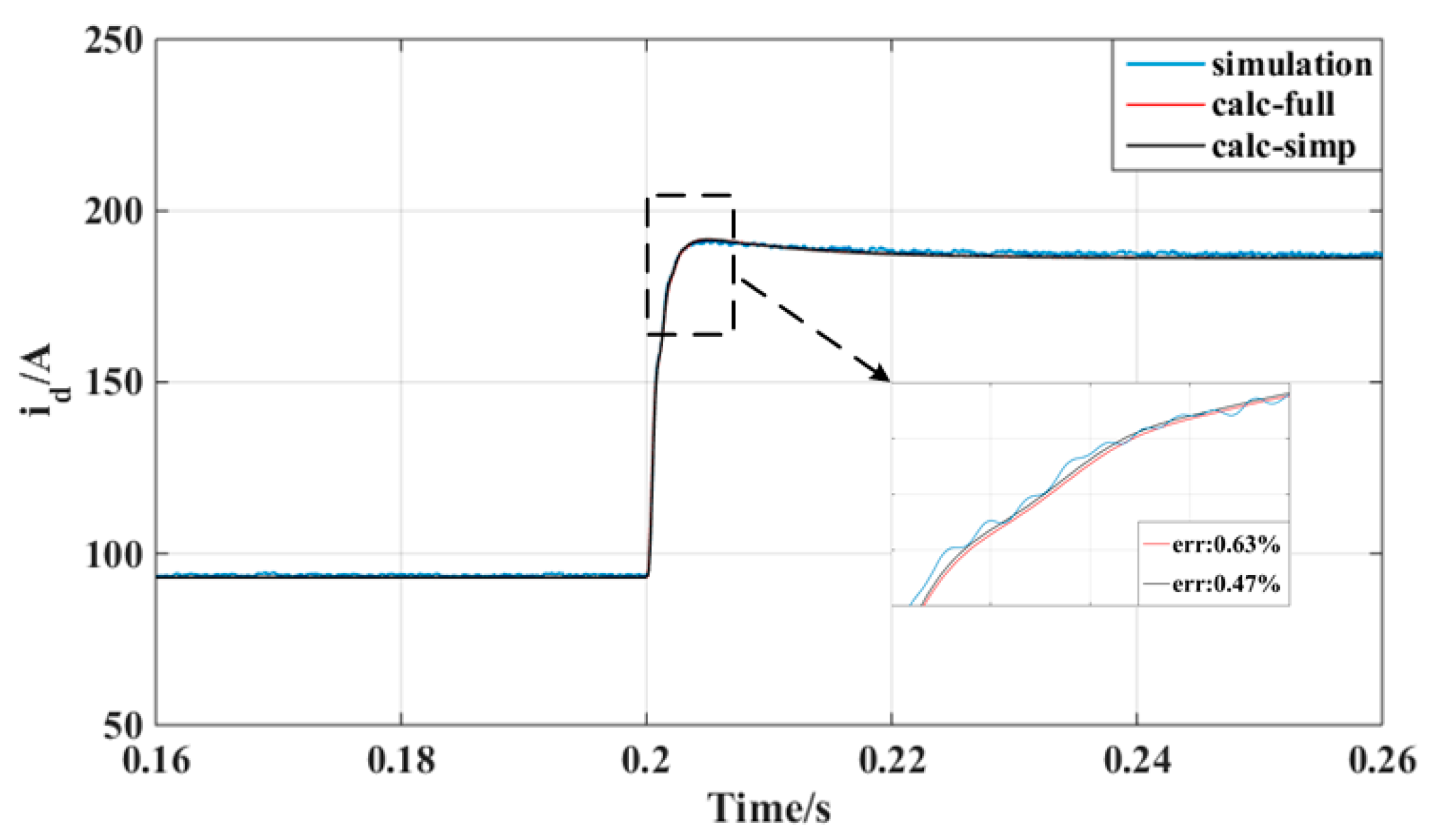
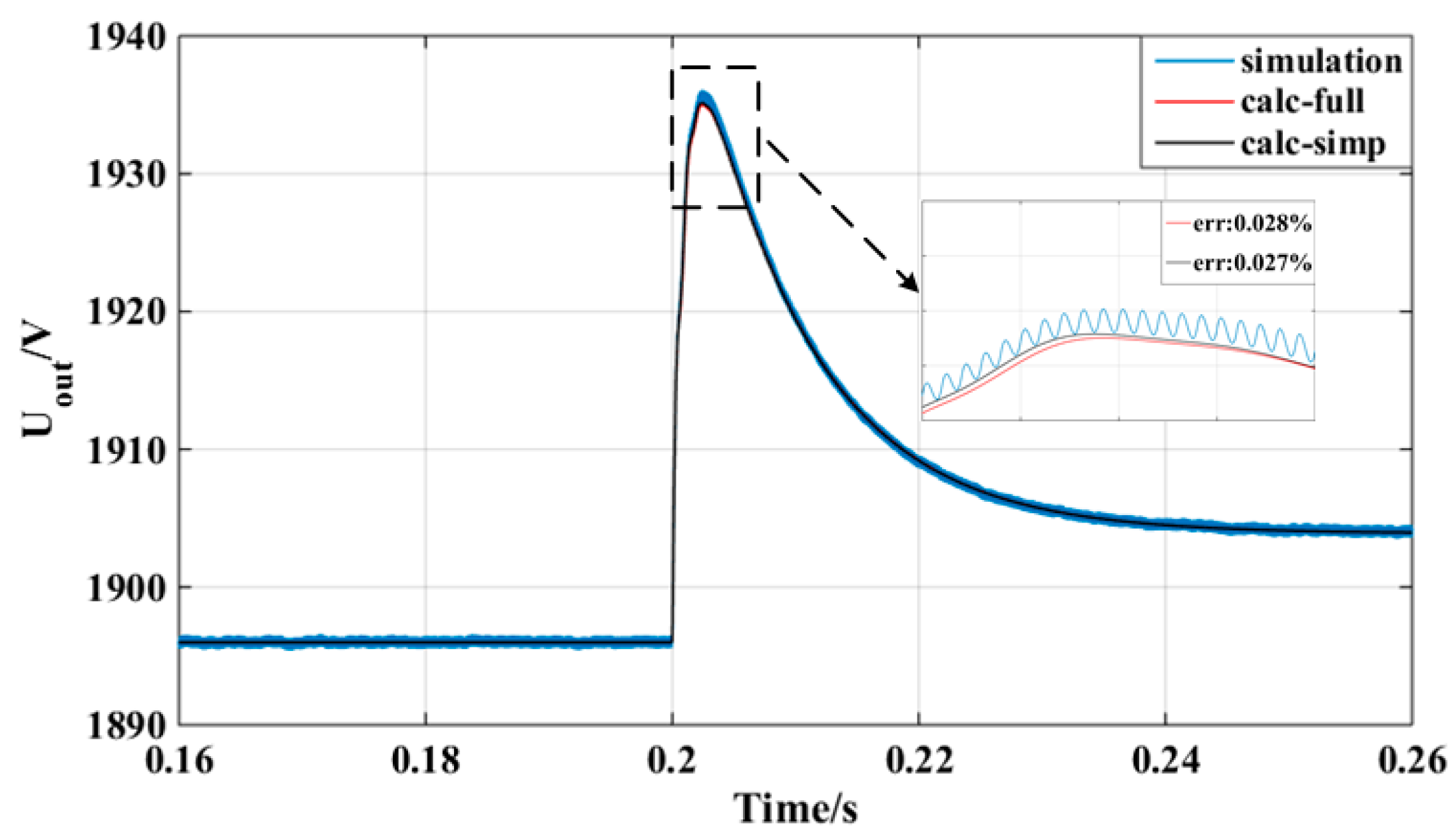
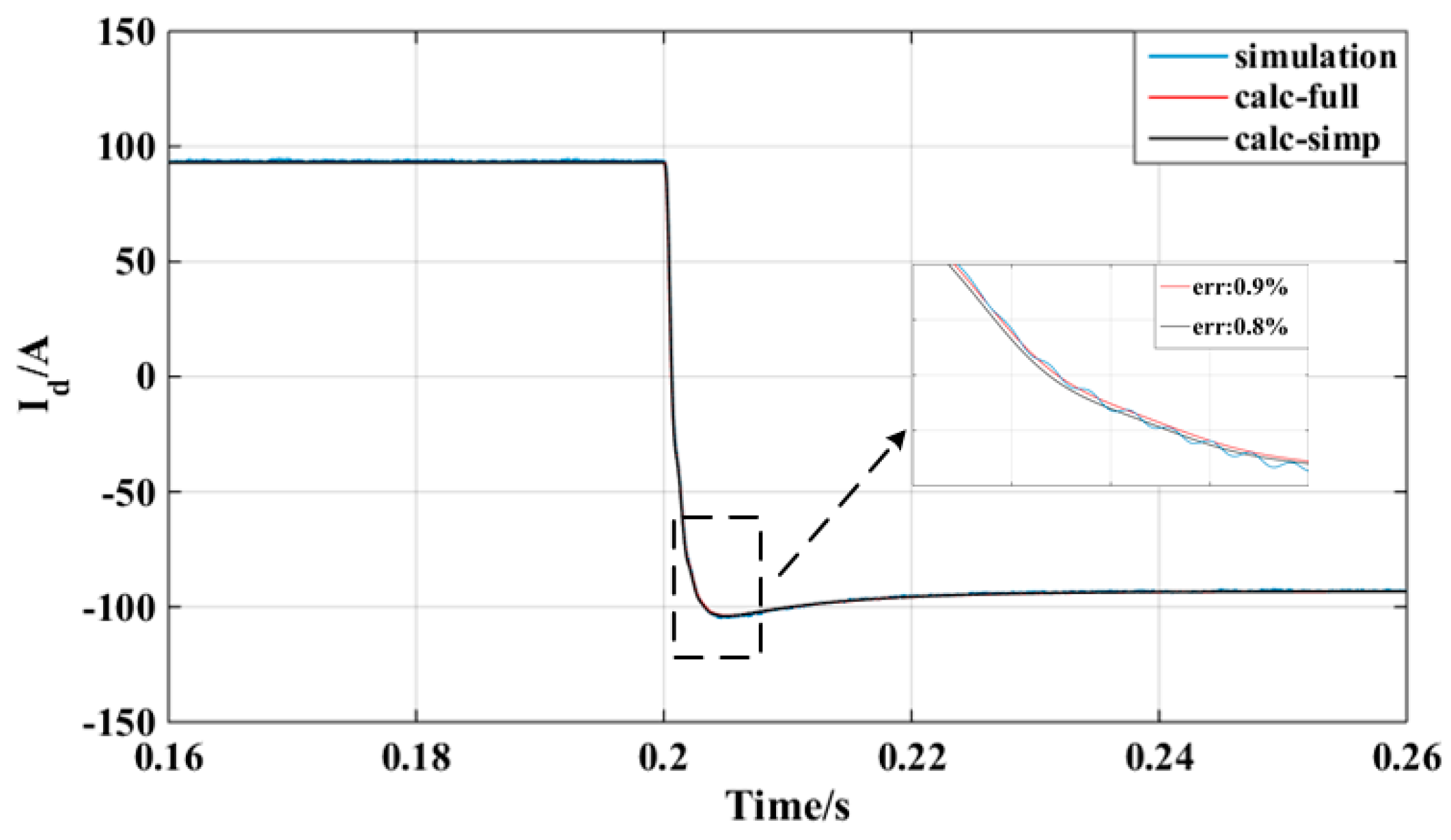
4.1. Case I: Model Verification by Load Step
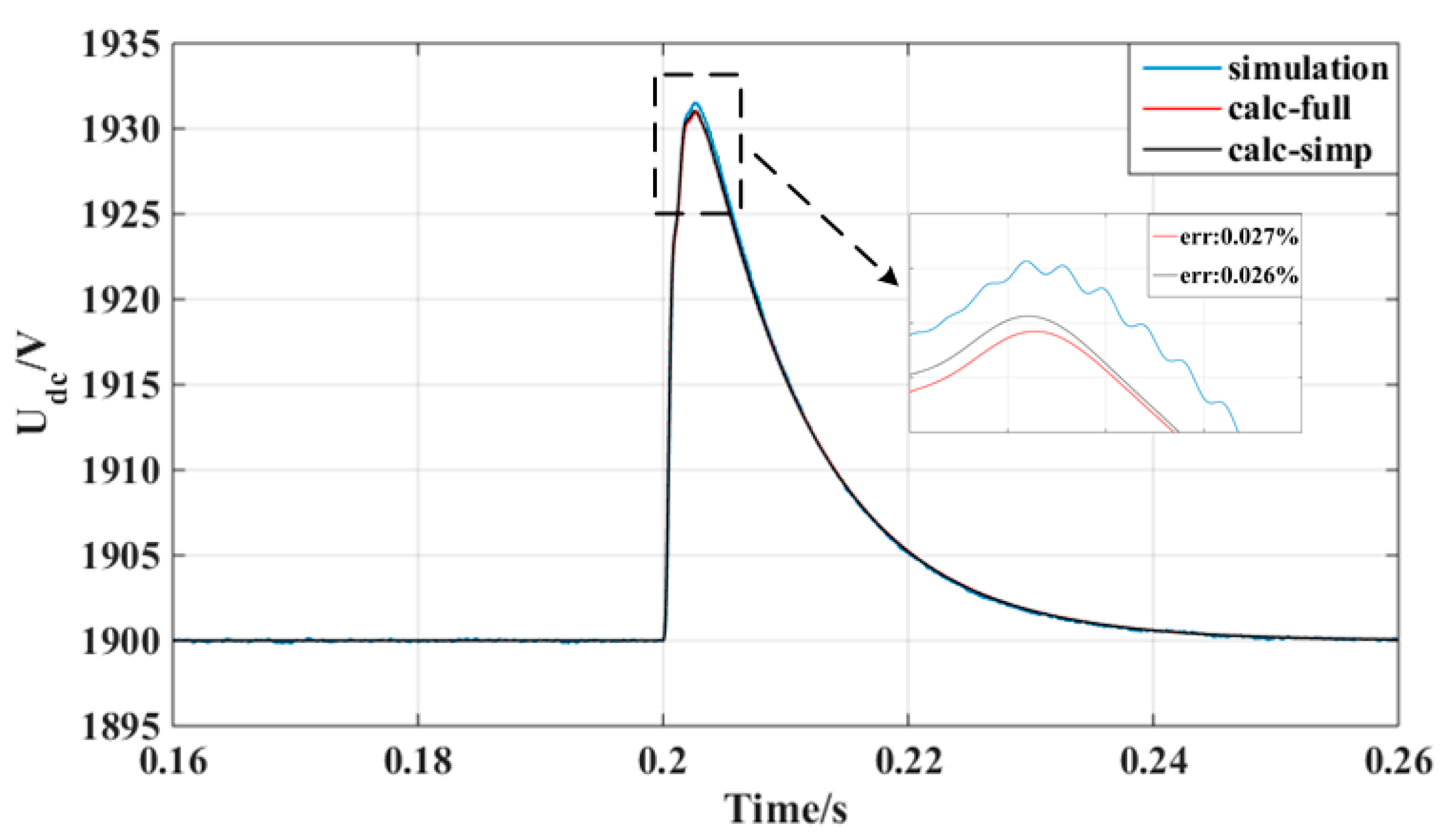
4.2. Case II Model Verification by Power Inversion
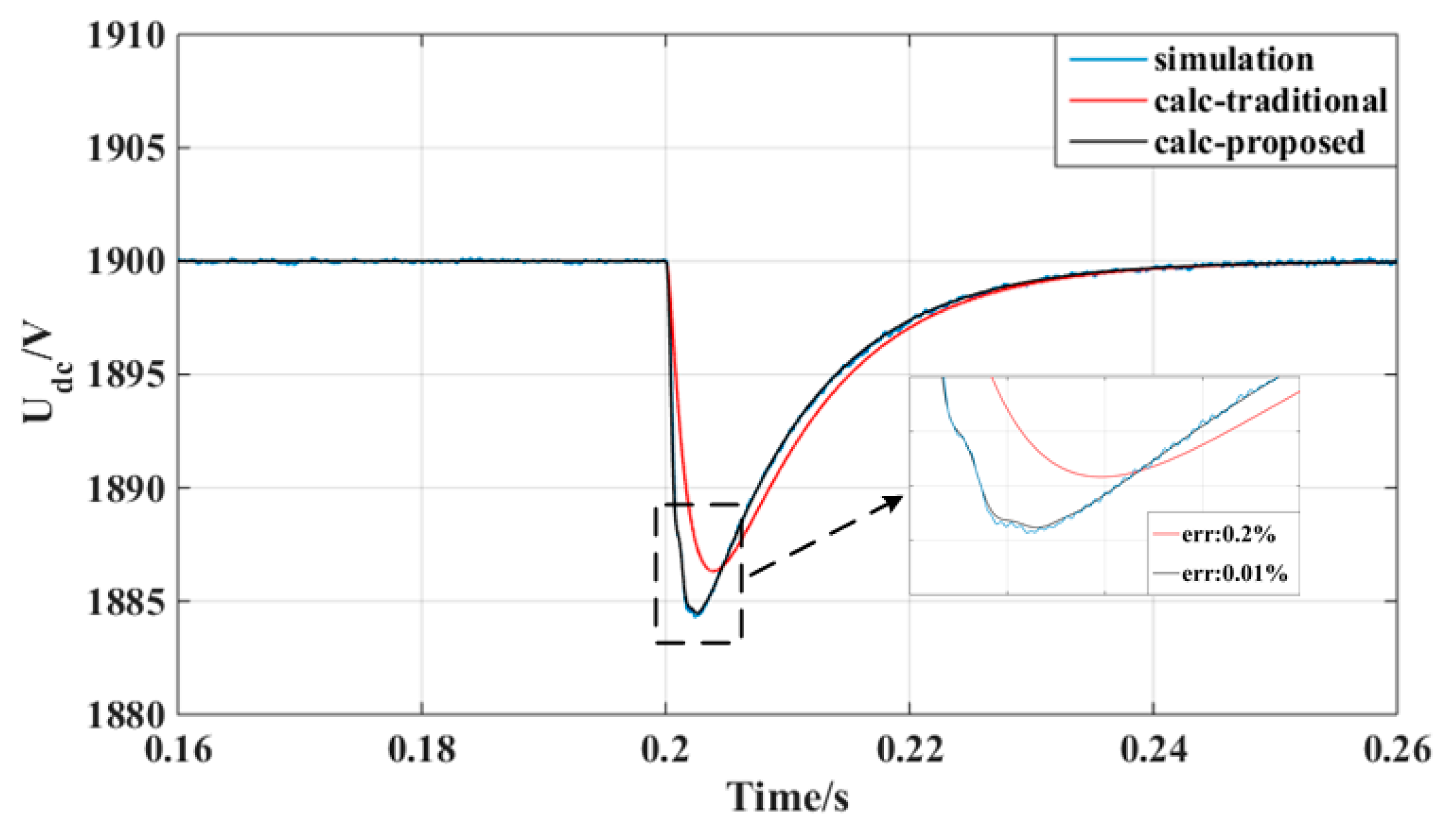
4.3. Case III Model Contrast Verification
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Matrix Coefficient
Appendix B. Participation Factor

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| λ1 | λ2 | λ3 | λ4 | λ5 | λ6 | λ7 | λ8 | λ9 | λ10 | λ11 | λ12 | λ13 | λ14 | λ15 | λ16 | λ17 | λ18 | λ19 | λ20 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ic_up | 0.0000 | 0.0000 | 0.0003 | 0.0003 | 0.0005 | 0.0004 | 0.2587 | 0.2587 | 0.2580 | 0.2580 | 0.0172 | 0.0159 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| id_up | 0.0009 | 0.0009 | 0.0061 | 0.0061 | 0.5543 | 0.5394 | 0.0121 | 0.0121 | 0.0107 | 0.0107 | 0.0191 | 0.0183 | 0.0002 | 0.0002 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| iq_up | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 1.0376 | 0.0376 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| uc1_up | 0.0017 | 0.0017 | 0.0118 | 0.0118 | 0.0516 | 0.0399 | 0.1629 | 0.1629 | 0.1487 | 0.1487 | 0.2910 | 0.2837 | 0.0303 | 0.0302 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| uc2_up | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.1172 | 0.1172 | 0.1207 | 0.1207 | 0.3211 | 0.3131 | 0.0310 | 0.0309 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| ic_low | 0.0000 | 0.0000 | 0.0003 | 0.0003 | 0.0005 | 0.0004 | 0.2587 | 0.2587 | 0.2580 | 0.2580 | 0.0172 | 0.0159 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| id_low | 0.0009 | 0.0009 | 0.0061 | 0.0061 | 0.5543 | 0.5394 | 0.0121 | 0.0121 | 0.0107 | 0.0107 | 0.0191 | 0.0183 | 0.0002 | 0.0002 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| iq_low | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0376 | 1.0376 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| uc1_low | 0.0017 | 0.0017 | 0.0118 | 0.0118 | 0.0516 | 0.0399 | 0.1629 | 0.1629 | 0.1487 | 0.1487 | 0.2910 | 0.2837 | 0.0303 | 0.0302 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| uc2_low | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.1172 | 0.1172 | 0.1207 | 0.1207 | 0.3211 | 0.3131 | 0.0310 | 0.0309 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| id_sum | 0.0729 | 0.0729 | 0.4744 | 0.4744 | 0.0061 | 0.0000 | 0.0179 | 0.0179 | 0.0000 | 0.0000 | 0.0267 | 0.0000 | 0.0000 | 0.0003 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| iq_sum | 0.4491 | 0.4491 | 0.0692 | 0.0692 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| vd | 0.0701 | 0.0701 | 0.4555 | 0.4555 | 0.0128 | 0.0000 | 0.0008 | 0.0008 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| vq | 0.4491 | 0.4491 | 0.0692 | 0.0692 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| x1 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0001 | 0.0001 | 0.0009 | 0.0009 | 0.0008 | 0.0008 | 0.0624 | 0.0627 | 0.5613 | 0.5610 | 0.0000 | 0.0000 | 0.0002 | 0.0002 | 0.0000 | 0.0000 |
| x2 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0002 | 0.0002 | 0.0000 | 0.0000 | 0.5002 | 0.5002 | 0.0000 | 0.0000 |
| x3 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 1.1691 | 0.1690 |
| x1′ | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0001 | 0.0001 | 0.0009 | 0.0009 | 0.0008 | 0.0008 | 0.0624 | 0.0627 | 0.5613 | 0.5610 | 0.0000 | 0.0000 | 0.0002 | 0.0002 | 0.0000 | 0.0000 |
| x2′ | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.5002 | 0.5002 | 0.0001 | 0.0001 |
| x3′ | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.1690 | 1.1690 |
References
- Bifaretti, S.; Zanchetta, P.; Watson, A. Advanced power electronic conversion and control system for universal and flexible power management. IEEE Trans. Smart Grid 2011, 2, 231–243. [Google Scholar] [CrossRef]
- Glinda, M.; Marquardt, R. A new AC/AC multilevel converter family. IEEE Trans. Ind. Electron. 2005, 52, 662–669. [Google Scholar] [CrossRef]
- Gu, C.; Zheng, Z.; Xu, L. Modeling and control of a multiport power electronic transformer (PET) for electric traction applications. IEEE Trans. Power Electron. 2016, 31, 915–927. [Google Scholar] [CrossRef]
- Falcones, S.; Ayyanar, R.; Mao, X. A DC-DC multiport-converter-based solid-state transformer integrating distributed generation and storage. IEEE Trans. Power Electron. 2013, 28, 2192–2203. [Google Scholar] [CrossRef]
- Sabahi, M.; Goharrizi, A.Y.; Hossemi, S.H. Flexible power electronic transformer. IEEE Trans. Power Electron. 2010, 25, 2159–2169. [Google Scholar] [CrossRef]
- Contreras, J.P.; Ramirez, J.M. Multi-fed power electronic transformer for use in modern distribution systems. IEEE Trans. Smart Grid 2014, 5, 1532–1541. [Google Scholar] [CrossRef]
- Lu, X.; Lin, W.; Wen, J.; Li, Y. Modularized Small Signal Modeling Method for DC Grid. Proc. CSEE 2016, 36, 2880–2889. [Google Scholar]
- Yang, J.; Liu, K.; Wang, D.; Qin, L. Small Signal Stability Analysis of VSC-HVDC Applied to Passive Network. Proc. CSEE 2015, 35, 2400–2408. [Google Scholar]
- Zheng, C.; Zhou, X. Small Signal Dynamic Modeling and Damping Controller Designing for VSC Based HVDC. Proc. CESS 2006, 26, 7–12. [Google Scholar]
- Adam, G.P.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. Generalized Modeling of DC Grid for Stability Studies. In Proceedings of the 4th International Conference on Power Engineering, Energy and Electrical Drives, Istanbul, Turkey, 13–17 May 2013; pp. 1168–1174. [Google Scholar]
- Magne, P.; Nahid-Mobarakeh, B.; Pierfederici, S. General Active Global Stabilization of Multiloads DC-Power Networks. IEEE Trans. Power Electron. 2012, 27, 1788–1798. [Google Scholar] [CrossRef]
- Cole, S.; Beerten, J.; Belmans, R. Generalized dynamic VSC-MTDC model for power system stability studies. IEEE Trans. Power Syst. 2010, 25, 1655–1662. [Google Scholar] [CrossRef]
- Chaudhuri, N.R.; Majumder, R.; Chaudhuri, B.; Pan, J. Stability analysis of VSC-MTDC grids connected to multimachine AC systems. IEEE Trans. Power Deliv. 2011, 26, 2774–2784. [Google Scholar] [CrossRef]
- Alsseid, A.M.; Jovcic, D.; Starkey, A. Small signal modelling and stability analysis of multiterminal VSC-HVDC. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–10. [Google Scholar]
- She, J.; Zheng, Z.; Ai, Q. Modeling of DC micro-grid and stability analysis. Electr. Power Autom. Equip. 2010, 30, 86–90. [Google Scholar]
- Liutanakul, P.; Awan, A.-B.; Pierfederici, S.; Nahid-Mobarakeh, B.; Meibody-Tabar, F. Linear stabilization of a DC bus supplying a constant power load: A general design approach. IEEE Trans. Power Electron. 2010, 25, 475–488. [Google Scholar] [CrossRef]
- Anand, S.; Fernandes, B.G. Reduced-order model and stability analysis of low-voltage DC microgrid. IEEE Trans. Ind. Electron. 2013, 60, 5040–5049. [Google Scholar] [CrossRef]
- Li, Y.; Tang, G.; Wu, Y.; Yang, J. Modeling, Analysis and Damping Control of DC Grid. Trans. Power Electron. 2017, 37, 3372–3382. [Google Scholar]
- Li, Z.; Qu, P.; Wang, P. DC Terminal Dynamic Model of Dual Active Bridge Series Resonant Converter. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar]
- Pogaku, N.; Prodanović, M.; Green, T.C. Modeling, Analysis and Testing of Autonomous Operation of an Inverter-Based Microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]











| Characteristic Root | Value |
|---|---|
| λ1, λ2 | −53.32 ± 31738.43i |
| λ3, λ4 | −322.49 ± 30873.29i |
| λ5 | −45609.81 + 0i |
| λ6 | −46450.81 + 0i |
| λ7, λ8 | −1628.59 ± 6403.34i |
| λ9, λ10 | −1587.14 ± 6303.85i |
| λ11 | −1028.17 + 0i |
| λ12 | −1001.67 + 0i |
| λ13 | −107.92 + 0i |
| λ14 | −107.89 + 0i |
| λ15 | −50008 + 0i |
| λ16 | −50008 + 0i |
| λ17 | −2 + 0i |
| λ18 | −2 + 0i |
| λ19 | −1.99 + 0i |
| λ20 | −1.99 + 0i |
| MP-PET Configuration | Value |
|---|---|
| Rated apparent power [MVA] | 3 |
| dc voltage [V] | 1900 |
| The line to line voltage of grid (RMS) [kV] | 10 |
| Number of submodules per arm | 5 |
| Number of redundant submodules per arm | 1 |
| Grid side inductance [mH] | 1 |
| Arm inductance [mH] | 10 |
| CHB capacitance [mF] | 1 |
| DAB capacitance [mF] | 1 |
| Resonant inductance [μH] | 20 |
| Resonant capacitance [μF] | 50 |
| Resonant frequency [kHz] | 5 |
| CHB switching frequency [Hz] | 800 |
| Transformer ratio | 1:1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Li, Y.; Li, Z.; Zhao, C.; Gao, F.; Wang, P. Reduced-Order DC Terminal Dynamic Model for Multi-Port AC-DC Power Electronic Transformer. Energies 2019, 12, 2130. https://doi.org/10.3390/en12112130
Wang Z, Li Y, Li Z, Zhao C, Gao F, Wang P. Reduced-Order DC Terminal Dynamic Model for Multi-Port AC-DC Power Electronic Transformer. Energies. 2019; 12(11):2130. https://doi.org/10.3390/en12112130
Chicago/Turabian StyleWang, Zhe, Yaohua Li, Zixin Li, Cong Zhao, Fanqiang Gao, and Ping Wang. 2019. "Reduced-Order DC Terminal Dynamic Model for Multi-Port AC-DC Power Electronic Transformer" Energies 12, no. 11: 2130. https://doi.org/10.3390/en12112130
APA StyleWang, Z., Li, Y., Li, Z., Zhao, C., Gao, F., & Wang, P. (2019). Reduced-Order DC Terminal Dynamic Model for Multi-Port AC-DC Power Electronic Transformer. Energies, 12(11), 2130. https://doi.org/10.3390/en12112130