1. Introduction
Magnetic gears (MGs) have garnered more and more attention due to their potential to offer many advantages over mechanical gears, such as no lubrication, no maintenance, low acoustic noise, high reliability, long lifetime, and inherent overload protection [
1,
2]. They are particularly attractive for applications desiring a high-speed reduction ratio, such as electric vehicles [
3,
4] and wind turbines [
5].
Since 2001, K. Atallah and D. Howe applied the principle of magnetic field modulation to MGs, different types of MGs [
6,
7,
8] including the axial magnetic gear (AMG) [
9,
10,
11,
12] have been proposed. Compared to the coaxial MG, the AMG has not been studied in depth yet, because high axial force may limit the development of the AMG. However, the AMG shows superiority in applications requiring hermetic isolation.
A thorough, parametric comparison of axial and radial flux coaxial magnetic gears with surface-mounted permanent magnets is provided in [
13]. A topology for an axial flux magnetically geared machine, in which the electric machine is placed in the bore of the axial flux magnetic gear is proposed in [
14]. In [
15], an axial-flux modulated superconducting magnetic gear is specifically studied. The torque calculation formula of the coaxial MG is proposed in [
16]. The effect of various dimensional parameters of the coaxial MG on the torque capability has been studied [
17]. However, the torque and axial force calculation formula and the effect of various dimensional parameters on the torque capability of the axial magnetic gear with Halbach permanent magnet arrays (HAMG) have not yet been done.
In this paper, in order to study the contribution of each harmonic to the output torque and axial torque of the HAMG in depth, torque and axial force calculation formulas are proposed based on the air-gap flux densities. Because the air-gap flux densities at different radii of the HAMG are not the same, two simplified torque and axial force calculation formulas are proposed and compared. The influence of eight dimensional parameters on the torque capability of the HAMG is studied by the 3D finite element method (FEM). Meanwhile, in order to maximize the output torque density of the HAMG, an optimization is carried out with the aid of the Maxwell software.
3. Formulas for Calculating Torque and Axial Force of the Axial Magnetic Gear with Halbach Permanent Magnet Array (HAMG)
The interaction of the space harmonics is the reason for the torque production. It could be shown that the number of pole-pairs in the air-gap flux density produced by either the high-speed or low-speed rotor PMs, is given by,
where
p is the number of pole-pairs on PM rotor, and
ns is the number of the ferromagnetic modulator pole-pieces.
The air-gap flux density of the HAMG includes not only the radial component, the tangential component, but also the axial component. The axial flux density is the most important component of the air-gap flux density, which has the greatest influence on the torque capability of the HAMG. The tangential flux density also has some effect on the torque capability of the HAMG. However, the torque capability of the HAMG is independent of the radial flux density.
The torque and axial force of the HAMG are calculated by the Maxwell stress tensor based on the air-gap flux density distribution,
where
is the vacuum permeability,
is the axial flux density and
is the tangential flux density. The air-gap flux densities at different radii are not the same. There is no way to superimpose
and
at all radii of the air gap, respectively. Therefore, two simplified torque and axial force calculation methods are proposed to calculate the torque and axial force of the HAMG.
The first simplified torque and axial force calculation method is to replace the air-gap flux densities at different radii with the air-gap flux density at the mean radius
Rm, where
Rm = (
Rin +
Rout)/2. Therefore, the formulas for the torque and axial force of the HAMG by the first simplified method could be converted as,
The expressions of the axial flux density
and the tangential flux density
are as follows,
where
and
are the magnitude of Fourier coefficients,
and
are the initial angles of the axial and tangential flux density distribution. The expressions of the axial flux density
and the tangential flux density
at the mean radius
Rm are as follows,
Substituting Equations (8) and (9) into Equations (4) and (5), respectively. Equations (4) and (5) could be transformed as,
It can be found that only the interaction between the axial and tangential flux density components with the same pole-pair number could contribute to the torque and axial force. From (10) and (11), it can be found that the amplitudes of the axial and tangential flux densities of nth-order harmonic at the mean radius as well as their phase difference are critical to the torque production. However, the axial force of the HAMG is only related to the squared difference of amplitudes of the axial and tangential flux densities of nth-order harmonic at the mean radius.
The first simplified torque and axial force calculation method only consider the air-gap flux density at the mean radius, but do not consider that the air-gap flux densities at different radii of the HAMG are not the same. Moreover, the air-gap flux densities near the inner and outer radius are significantly reduced because of flux leakage. Therefore, a second simplified torque and axial force calculation method is proposed to calculate the torque and axial force of the HAMG.
Firstly, the air-gap flux densities at different radii in the air gap adjacent to the low-speed rotor (LG) of the HAMG are studied. The 13th order harmonic contribution to output torque is much larger than other harmonics. The inner radius of the air gap is 40 mm and the outer radius of the air gap is 70 mm. The air gap is divided into 30 parts according to the radius and each one is 1 mm. Draw circles at different radii, obtain the air-gap flux densities at different radii, perform the fast Fourier transformation (FFT) on the air-gap flux densities at different radii and obtain the amplitudes of the axial and tangential flux densities of 13th-order harmonic as well as their phase differences at different radii.
Table 2 lists the amplitudes and their phase differences of the axial and tangential flux densities of 13th-order harmonics at different radii in the LG of the HAMG, respectively.
Table 2 shows that the amplitudes of the axial and tangential flux densities of 13th-order harmonics as well as their differences at different radii vary from 0.830 T to 1.41 T, 0.374 T to 0.494 T and 43.0° to 72.7°, respectively.
For the amplitude of the axial flux density of 13th-order harmonic
, the amplitude of the tangential flux density of 13th-order harmonic
and the cosine value of their phase difference of the axial and tangential flux densities of 13th-order harmonic
, the impact of
on the output torque and axial force of the HAMG is greater than
and
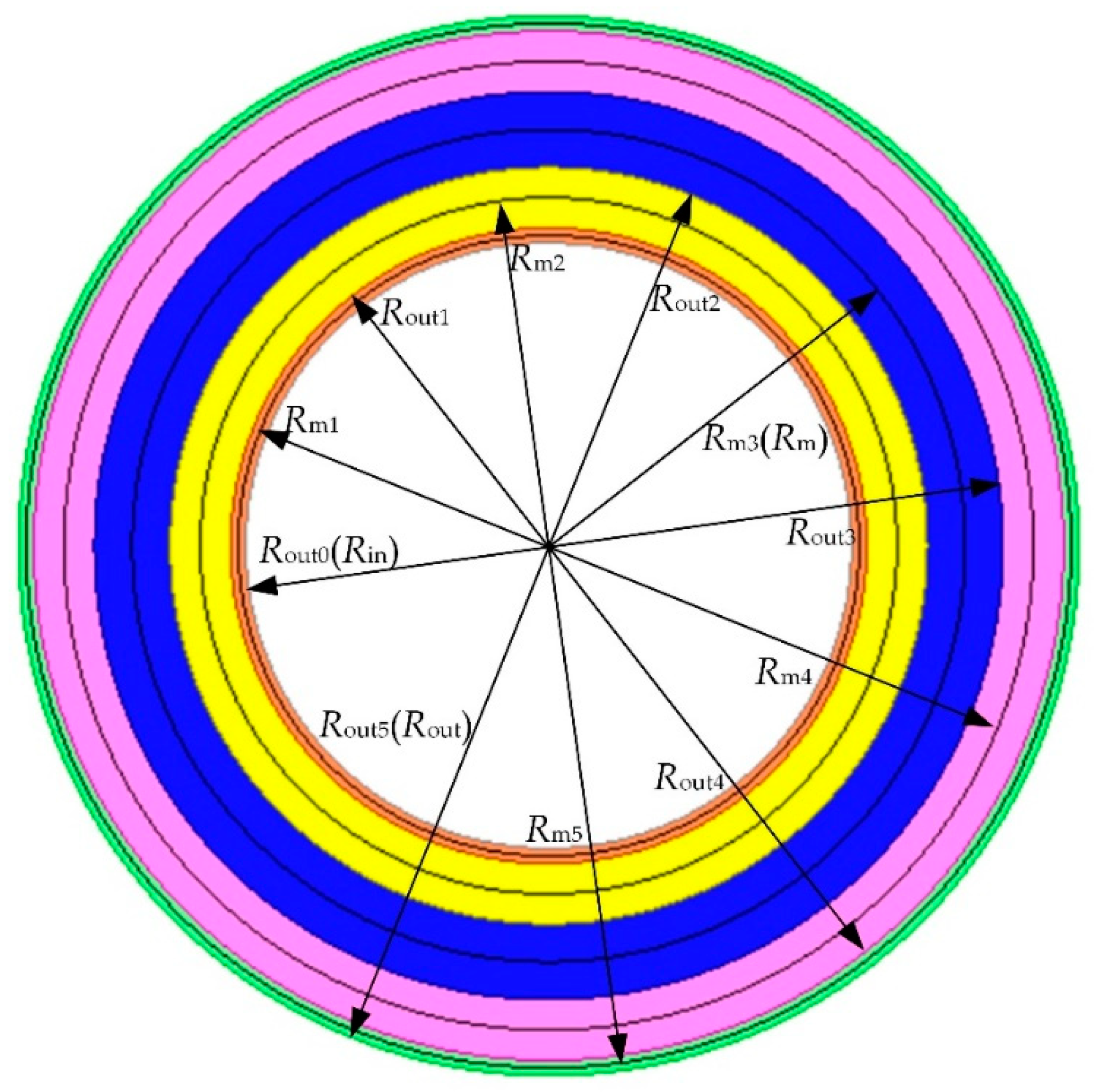
. Therefore, the second simplified calculation method for calculating the torque and axial force of the HAMG is to divide the LG into five parts according to the variation rule of
at different radii, as shown in
Figure 3. Each color represents a part of the LG. The torque and axial force generated by the five parts are superposed to be the torque and axial force generated by the entire HAMG, respectively. The 1st part is from
Rout0 = 40 mm to
Rout1 = 42 mm, the 2nd part is from
Rout1 = 42 mm to
Rout2 = 50 mm, the 3rd part is from
Rout2 = 50 mm to
Rout3 = 60 mm, the 4th part is from
Rout3 = 60 mm to
Rout4 = 68 mm and the 5th part is from
Rout4 = 68 mm to
Rout5 = 70 mm.
According to Equations (2) and (3), the expressions of the torque and axial force generated by the
ith (
i = 1, 2, 3, 4, 5) part are as follows,
The air-gap flux densities at different radii of the
ith part are replaced by the air-gap flux density at the mean radius
Rmi of the
ith part, where
Rmi = (
Routi +
Routi−1)/2. Therefore, the expressions of the torque and axial force generated by the
ith part could be converted as,
The expressions of the axial and tangential flux densities at the mean radius
Rmi of the
ith part are as follows,
Substituting Equations (16) and (17) into Equations (14) and (15), Equations (14) and (15) could be transformed as,
Table 3 lists the amplitudes and their phase differences of the axial and tangential flux densities of dominating harmonics at the radii of
Rm1,
Rm2,
Rm3,
Rm4 and
Rm5 in the HAMG, respectively.
Table 4 lists the torque generated by 4th- and 13th-order harmonics at the radius of
Rm in the HAMG calculated by the first simplified torque calculation method.
Table 4 lists the torque generated by 4th- and 13th-order harmonics at the radii of
Rm1,
Rm2,
Rm3,
Rm4 and
Rm5 in the HAMG calculated by the second simplified torque calculation method, respectively. In order to make the results more accurate,
Table 4 also lists the total torque generated by other harmonics except for 4th- and 13th-order harmonics.
It can be seen from
Table 4 that the torque generated by 4th-order harmonic is much larger than that of other harmonics in the air gap adjacent to the high-speed rotor (HG), while the torque generated by 13th-order harmonic is much greater than that of other harmonics in the LG. The output torque of the HAMG calculated by the 3D FEM is 54.7 Nm. The output torque of the HAMG calculated by the first simplified torque calculation method is 61.1 Nm, which has 12% increase over the HAMG calculated by the 3D FEM. The output torque of the HAMG calculated by the second simplified torque calculation method is 55.8 Nm, which is 2.0% larger than that obtained by the 3D FEM.
Table 5 lists the axial force generated by 4th- and 13th-order harmonics at the radius of
Rm in the HAMG by the first simplified axial force calculation method.
Table 5 lists the axial force generated by 4th- and 13th-order harmonics at the radii of
Rm1,
Rm2,
Rm3,
Rm4 and
Rm5 in the HAMG calculated by the second simplified axial force calculation method, respectively. As with the torque calculation,
Table 5 also lists the total axial force generated by other harmonics except for the 4th- and 13th-order harmonics.
The axial force on the low-speed rotor of the HAMG obtained by the 3D FEM is 2750 N. The axial force on the low-speed rotor of the HAMG obtained by the first simplified axial force calculation method is 3006 N, which has a 9.3% increase over the HAMG by the 3D FEM. The axial force on the low-speed rotor of the HAMG obtained by the second simplified axial force calculation method is 2728 N, which is 0.80% smaller than that obtained by the 3D FEM.
The air-gap flux densities of the HAMG at different radii are not the same and the air-gap flux densities near the inner and outer radius are significantly reduced due to flux leakage, which may explain why the output torque and axial force of the HAMG obtained by the first simplified calculation method are greater than those calculated by the 3D FEM. The output torque and axial force of the HAMG calculated by the second simplified calculation method are very close to those calculated by the 3D FEM. Therefore, the accuracy of the second simplified calculation method is much higher than the first simplified calculation method. Of course, the finer the air gap is divided, the closer the final calculated torque and axial force of the HAMG are to the actual values of torque and axial force of the HAMG. However, the finer the air gap is divided, the greater the workload is. Therefore, it is reasonable to divide the air gap into five parts.
5. Optimization of the HAMG
After analyzing the effect of individual dimensional parameters on the torque capability of the HAMG, an optimization is carried out with comprehensive consideration of the interactions among all parameters simultaneously. During the optimization process, the parameters Rout, Rin and Tm are fixed as 70 mm, 40 mm and 8 mm, respectively. Maximizing the output torque density is set as the optimization objective.
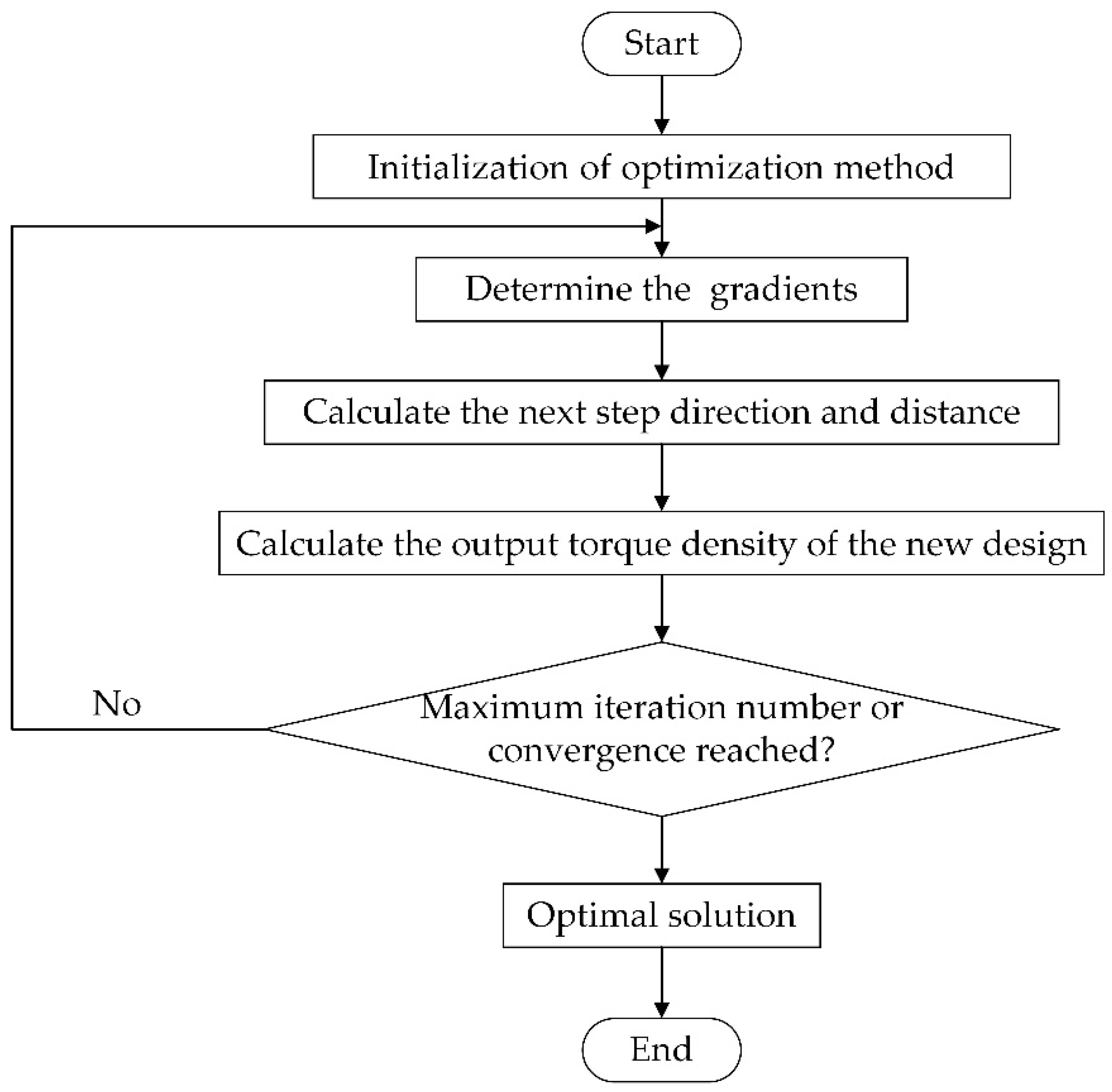
Maxwell software is adopted for the optimization. The optimal solution is found according to the flowchart given in
Figure 10. The 3D FEM is used to compute the output torque density in order to enhance the solution accuracy. After more than 400 sets of data calculation, optimization has finally reached convergence. The parametric optimization constraints and results are obtained and listed in
Table 6. Moreover,
Table 6 presents the comparison between parametric analysis and optimization. The results indicate that a good match is obtained between parametric analysis and optimization results.
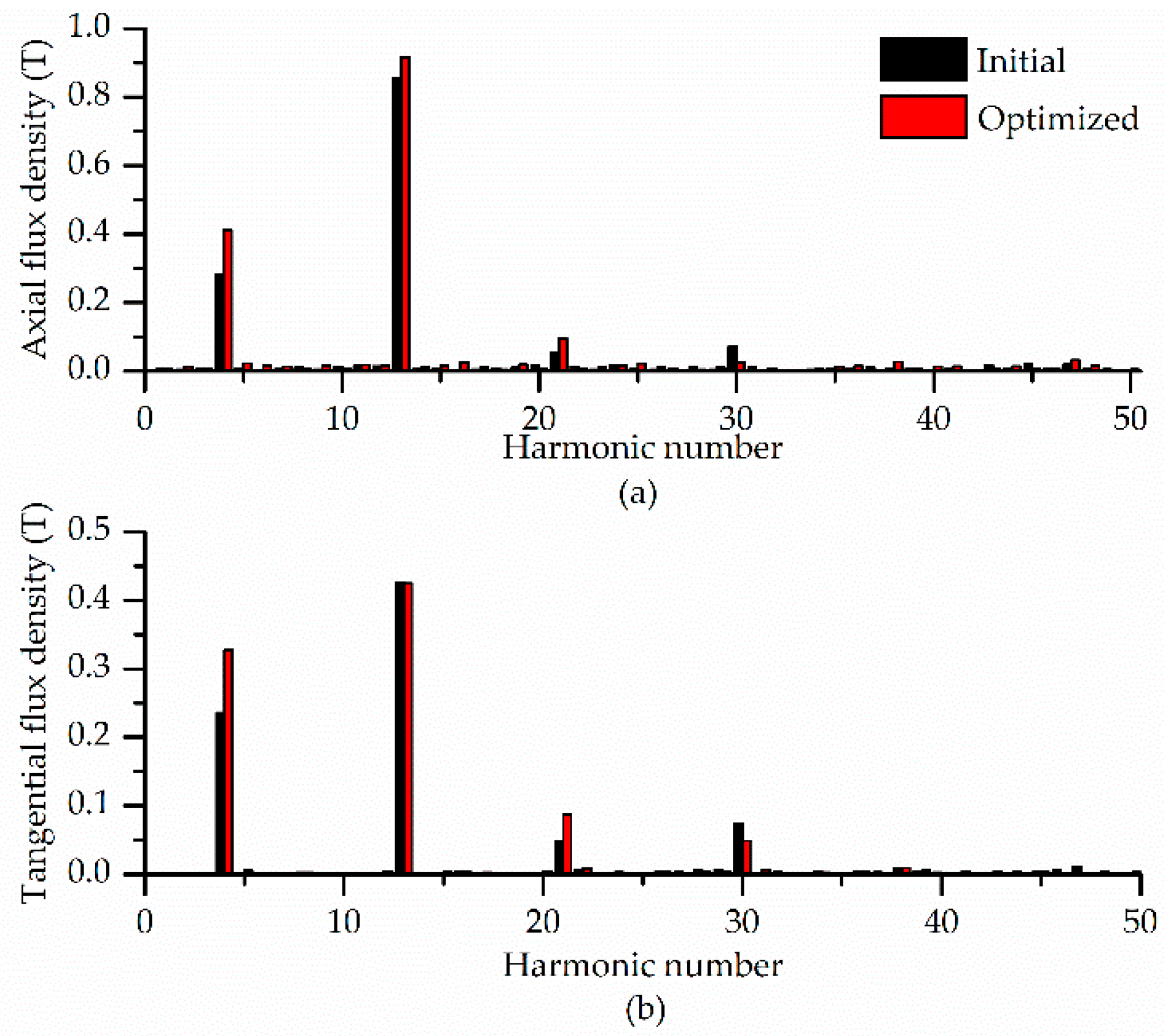
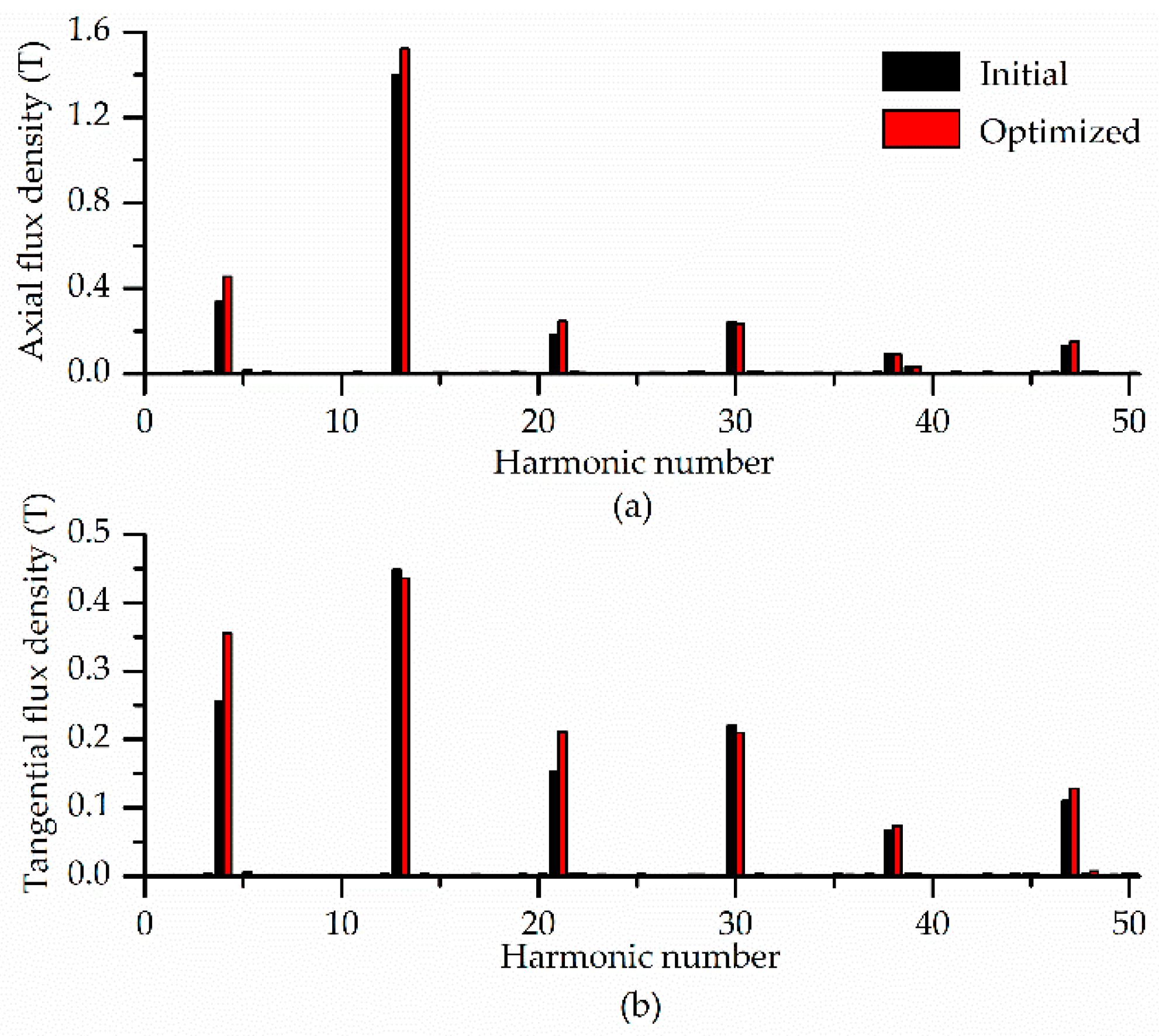
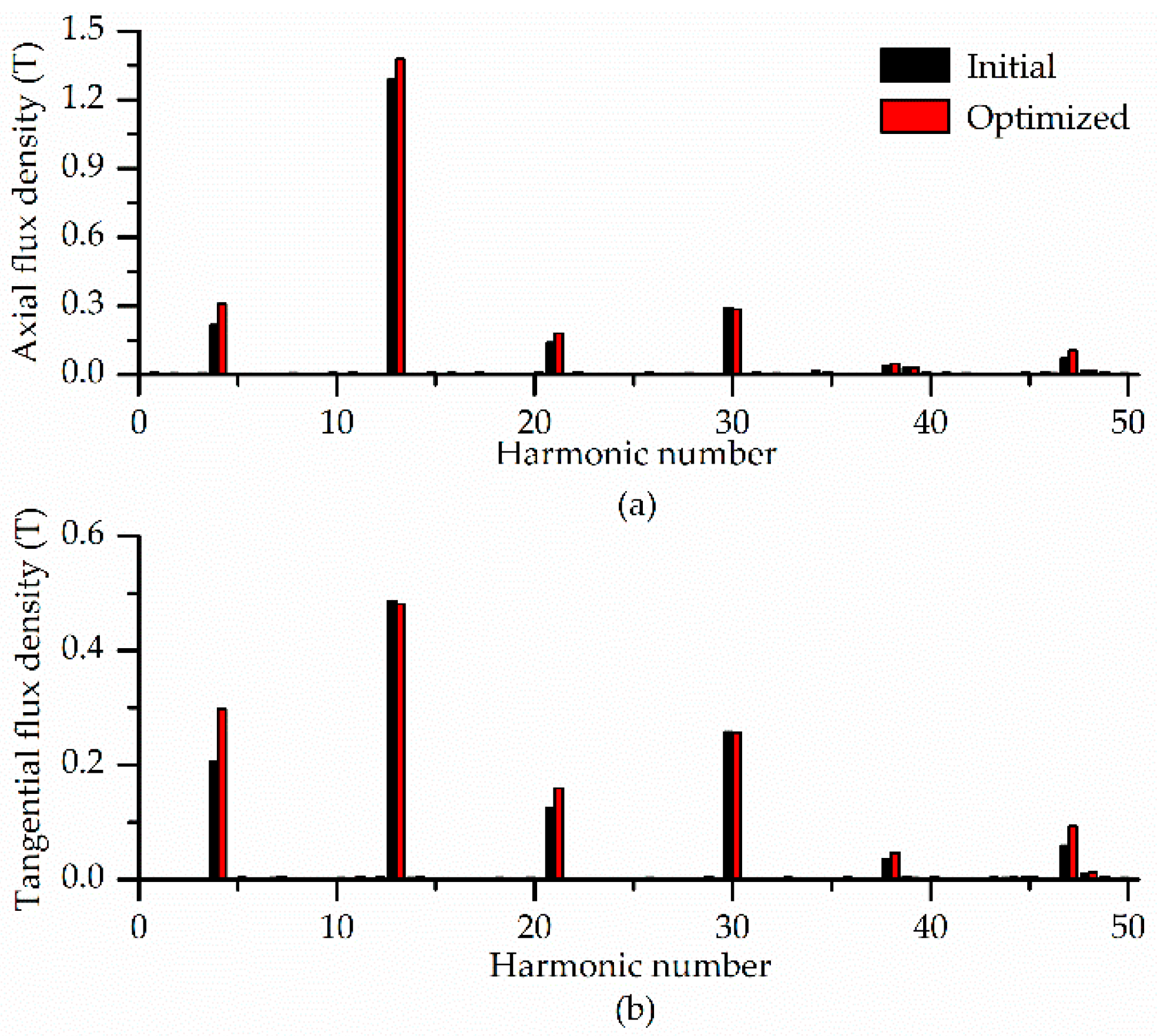
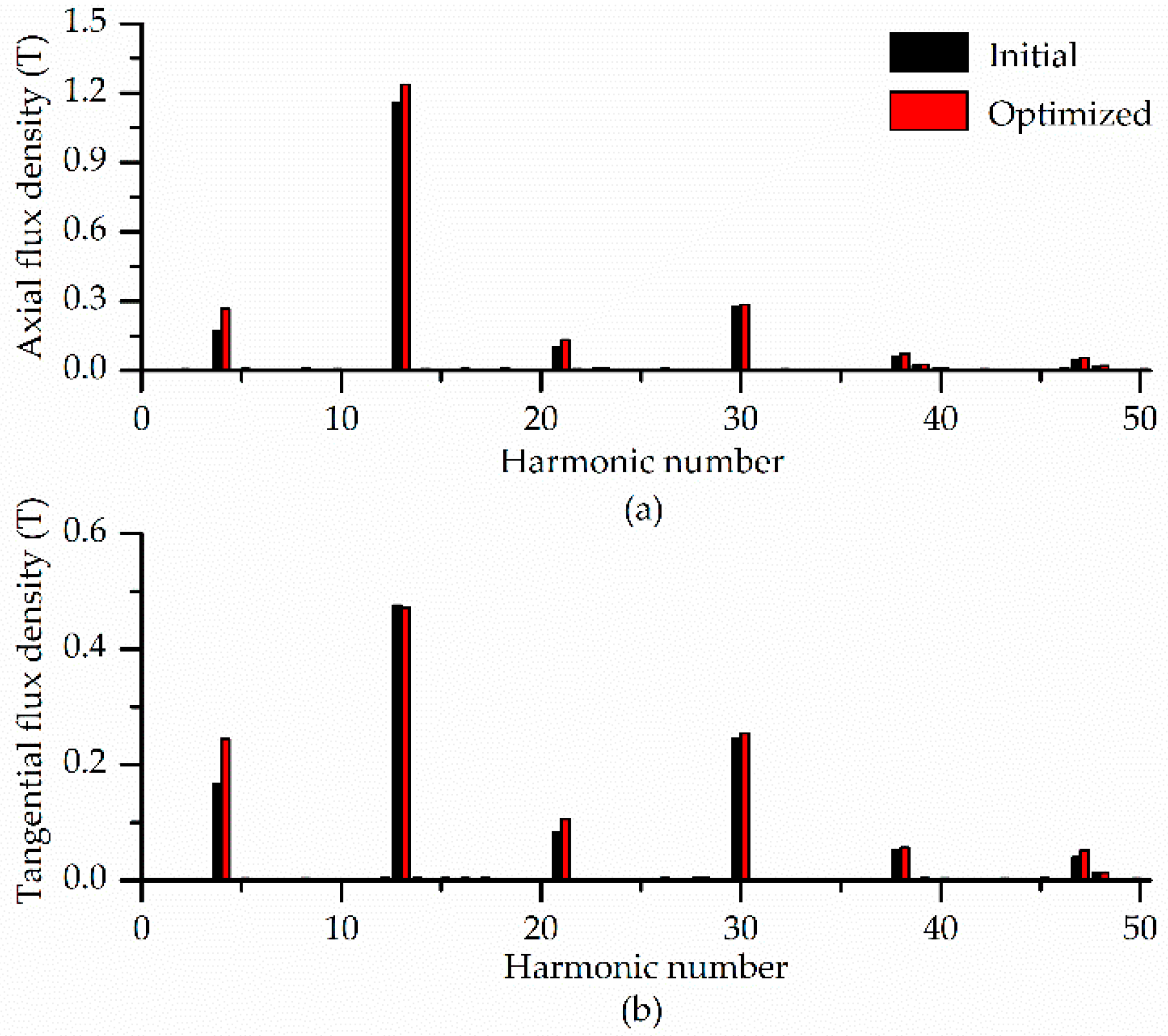
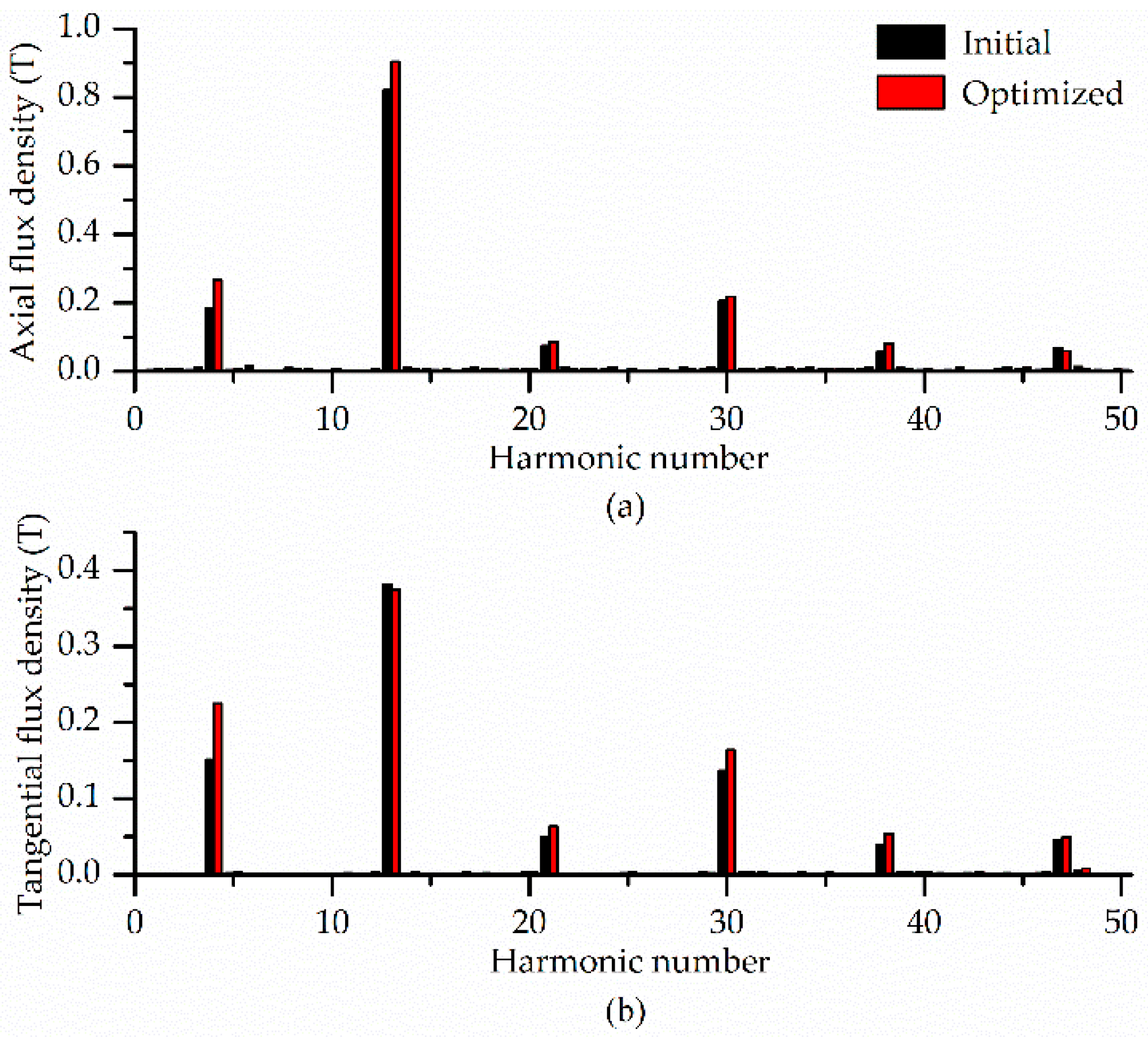
In order to explain the high torque capability of the optimized HAMG in depth, spectrum analysis is presented based on the second simplified torque calculation formulas.
Figure 11,
Figure 12,
Figure 13,
Figure 14 and
Figure 15 show the FFT analysis of the axial and tangential flux densities at the radii of
Rm1,
Rm2,
Rm3,
Rm4 and
Rm5 in the LG of the HAMG. It could be shown that the amplitudes of 4th-, 13th-, 21st- and 47th-order harmonics of the axial flux densities and the amplitudes of 4th-, 21st- and 38th-order harmonics of the tangential flux densities at the radii of
Rm1,
Rm2,
Rm3,
Rm4 and
Rm5 in the LG are all improved by optimization in different degree.
The output torques of the initial and optimized HAMG obtained by the 3D FEM are 54.7 Nm and 82.6 Nm, respectively. The output torque has an increase of 51% by optimization. The initial and optimized output torques obtained by the second simplified calculation method are 55.8 Nm and 84.6 Nm, which are 2.0% and 2.4% larger than the torques obtained by the 3D FEM.
Table 7,
Table 8,
Table 9,
Table 10 and
Table 11 list the magnitudes of the axial and tangential flux densities of dominating harmonics, their phase differences and generated torque due to the dominant harmonics. The output torque of the HAMG is mainly generated by 13th-order harmonic.
Table 7 shows that the algebraic value of
at the radius of
Rm1 is improved from 0.368 to 0.389 by optimization with an increase of 5.7%, while the algebraic value of
is improved from 0.598 to 0.795 with a significant increase of 33%.
Table 8 shows that the algebraic value of
at the radius of
Rm2 is improved from 0.623 to 0.664 by optimization with an increase of 6.6%, while the algebraic value of
is improved from 0.615 to 0.837 with a significant increase of 36%.
Table 9 shows that the algebraic value of
at the radius of
Rm3 is improved from 0.629 to 0.663 by optimization with an increase of 5.4%, while the algebraic value of
is improved from 0.429 to 0.612 with a significant increase of 43%.
Table 10 shows that the algebraic value of
at the radius of
Rm4 is improved from 0.551 to 0.583 by optimization with an increase of 5.8%, while the algebraic value of
is improved from 0.311 to 0.463 with a significant increase of 49%.
Table 11 shows that the algebraic value of
at the radius of
Rm5 is improved from 0.313 to 0.339 by optimization with an increase of 8.3%, while the algebraic value of
is improved from 0.350 to 0.521 with a significant increase of 49%. Therefore, the increase in output torque of the HAMG by optimization is mainly caused by the increase of the phase difference of 13th order harmonic. The initial and optimized volumes of the HAMG are 700 cm
3 and 885 cm
3, respectively. As a result, the output torque density of the HAMG is improved from 78.1 kNm/m
3 to 93.3 kNm/m
3 by optimization with an increase of 19%.
6. Conclusions
In this paper, torque and axial force calculation formulas are proposed based on the air-gap flux density distribution. Because of the difference of the air-gap flux densities at different radii, two simplified torque and axial force calculation formulas are proposed and compared. The accuracy of the second simplified torque and axial force calculation method is much higher than the first simplified torque and axial force calculation method.
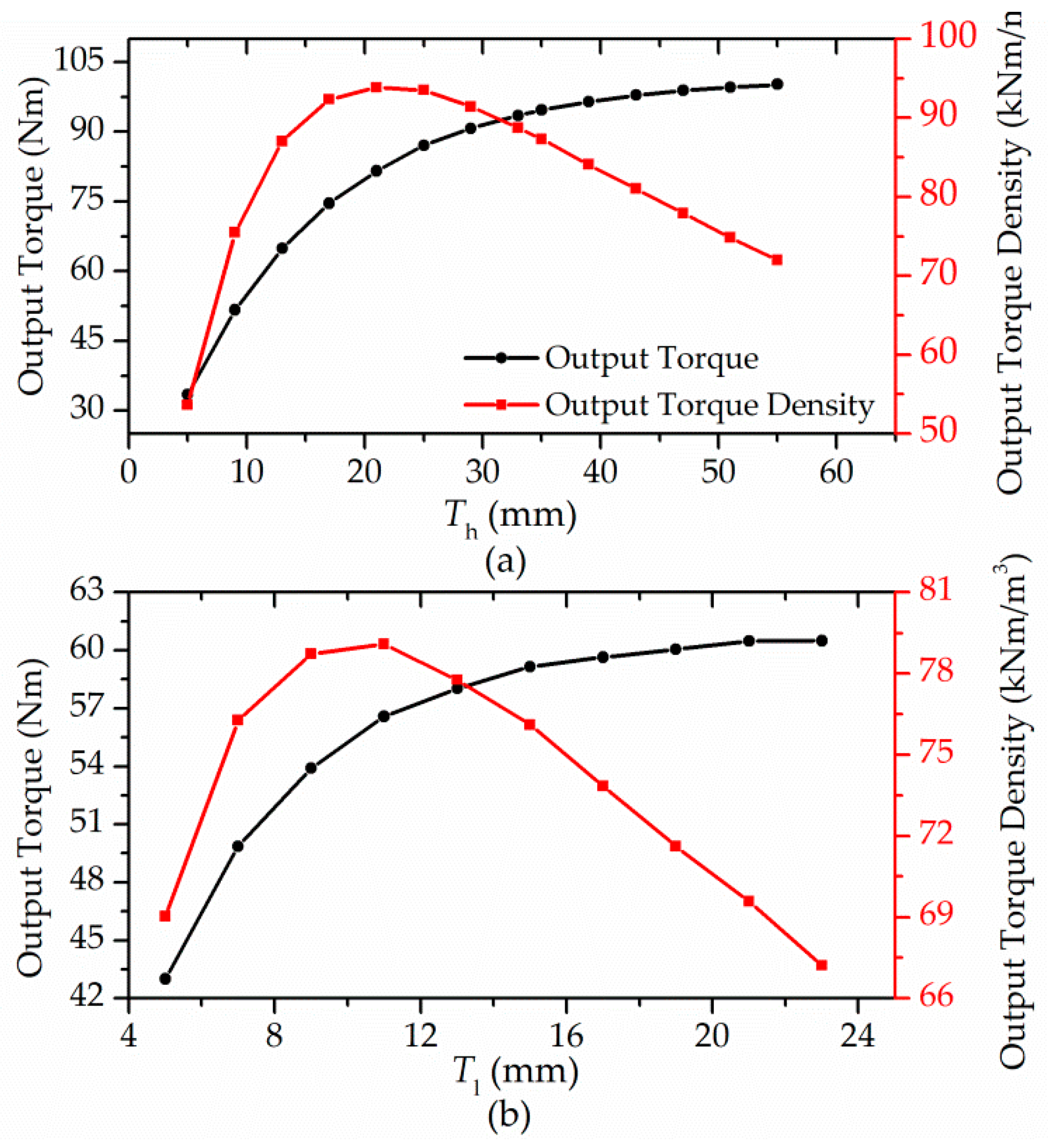
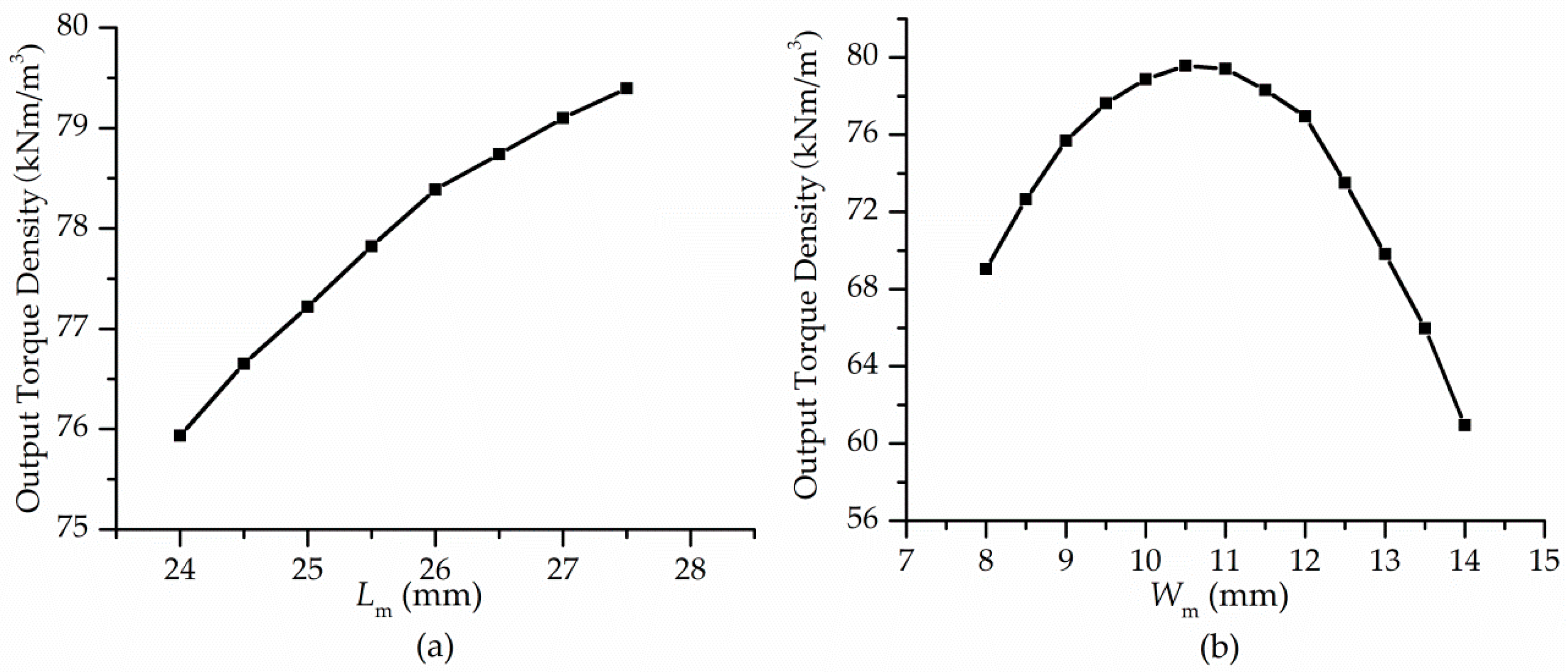
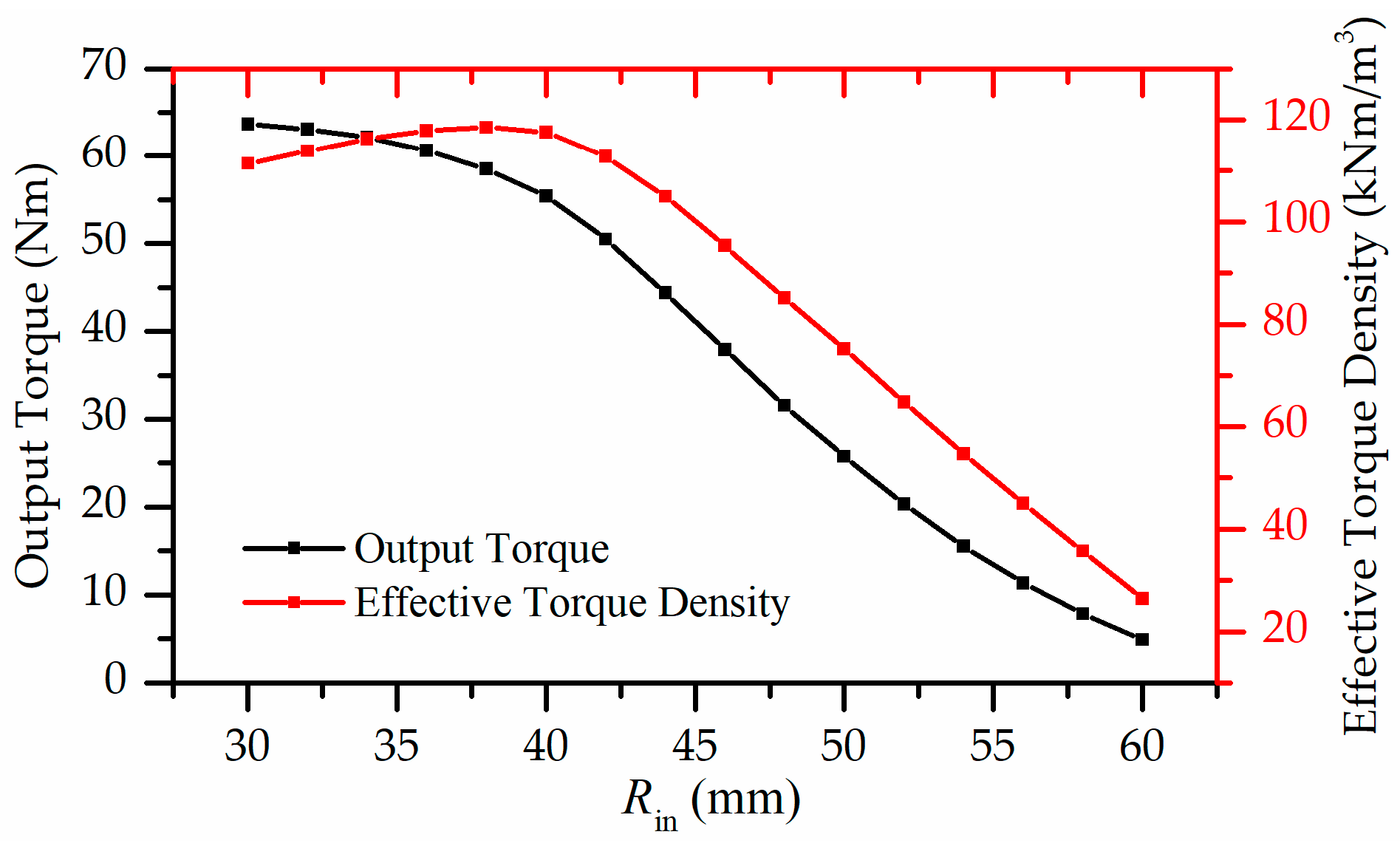
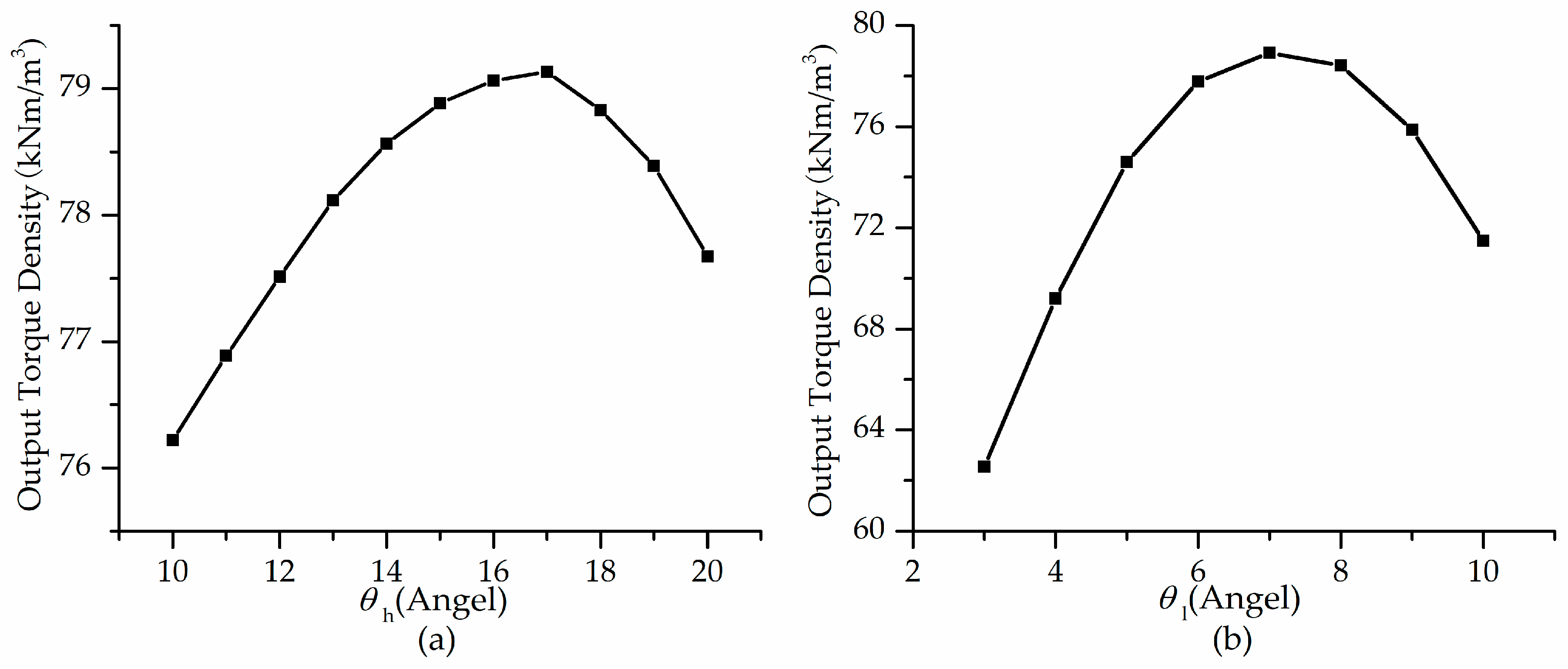
The influence of individual dimensional parameters on the torque capability of the HAMG is investigated. To maximize the output torque density, Maxwell software is used to carry out the optimization with the aid of the 3D FEM. Six parameters, i.e., Th, Tl, Rin, Tm, Wm and θl, play important roles in torque generation of the HAMG. Details are as follows:
The output torque density of the HAMG increases first and then decreases as Th, Tl, Tm, Wm and θl increase;
The output torque density of the HAMG significantly decreases as Rin increases;
Th, Tl and Rin have more significant impacts on the output torque density of the HAMG than others.
Therefore, the amount of PMs is most important for the output torque density of the HAMG.
By carrying out the optimization, the output torque density of the HAMG has an increase of 19%. By spectrum analysis, the increase in output torque by optimization is mainly caused by the phase difference of 13th-order harmonic. The torque and axial force calculation formulas, the influence of individual dimensional parameters on the torque capability and the reason for the increase in output torque by optimization could be applied to the same type of HAMG.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}