Spatio-Temporal Model for Evaluating Demand Response Potential of Electric Vehicles in Power-Traffic Network


Abstract
:1. Introduction
1.1. Motivation and Background
1.2. Literature Overview
1.3. Contributions
- (1)
- Aspects beyond the characteristics of spatial distribution of EVs and travel pattern analysis have been neglected in the existing literature, we model a dynamic traffic network considering the traffic time-varying information with randomness in travel behavior based on trip chains.
- (2)
- A method to analyze EVs’ objective and subjective participation in a DR event is developed.
- (3)
- Differently from the fixed demand response mode in the related research, we proposed a fuzzy logic-based mechanism, we modeled uncertainties that affect the estimation of demand response potential of a single EV and EVA. Three key factors—the remaining parking time, the remaining SOC, and incentive electricity pricing—are considered.
- (4)
- The real-time participation level of a single EV and EVA from a spatio-temporal scope in the power-traffic network are evaluated.
2. EVs Travel Model in Dynamic Traffic Network
2.1. Time-Dependent Dynamic Road Network Model
2.2. Spatio-Temporal Travel Characteristics of EVs
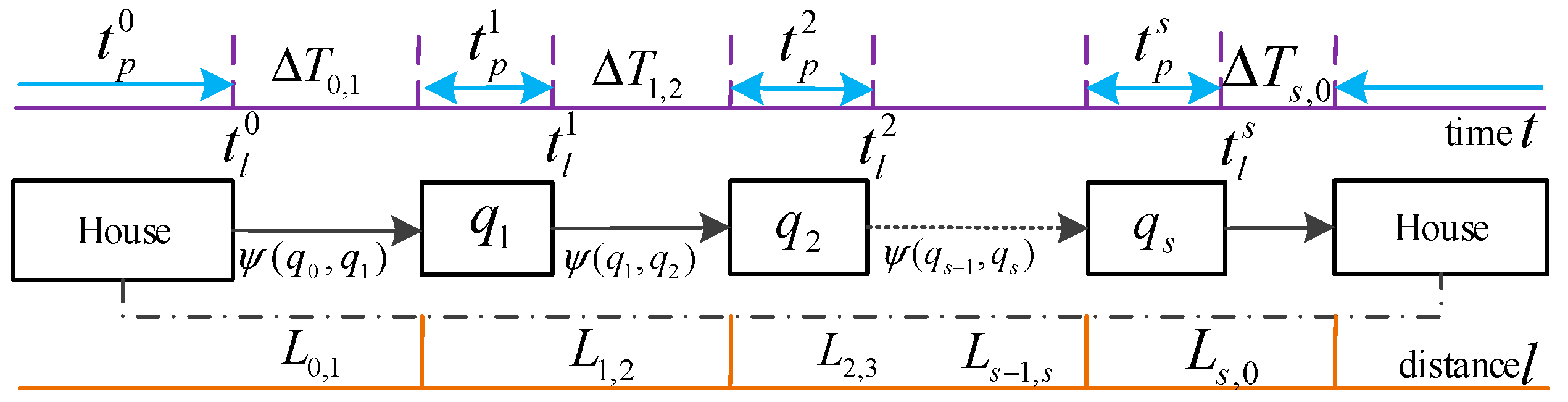
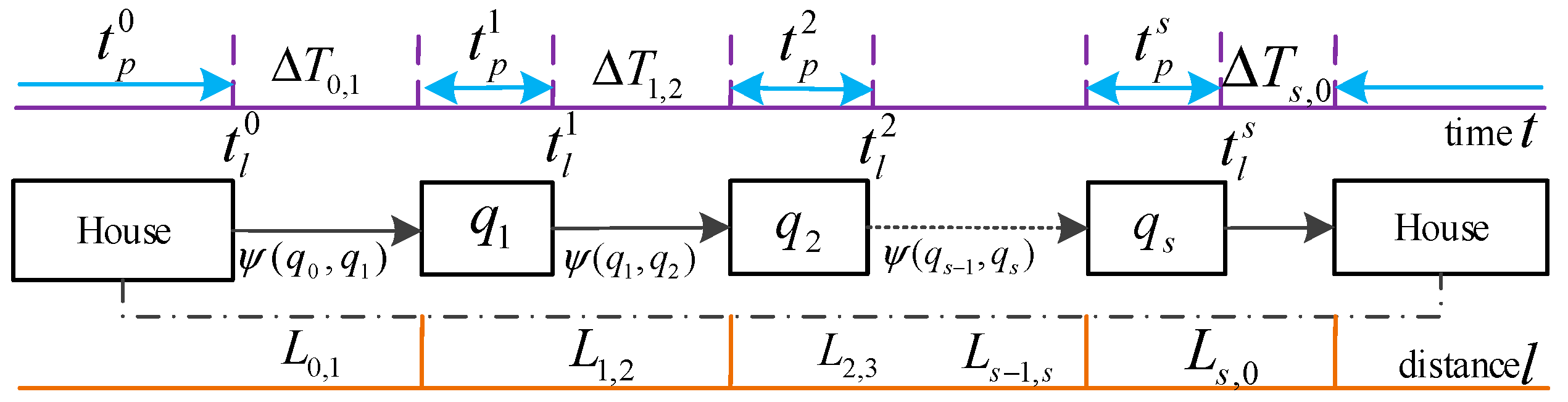
2.2.1. Trip Chains and Travel Route Planning
2.2.2. Departure Time of the First Trip
2.2.3. Traveling and Traveled Time
2.2.4. Arrival and Departure Time at the Destination
2.2.5. Parking Times
2.2.6. Route Planning
2.3. EV Battery SOC Estimate
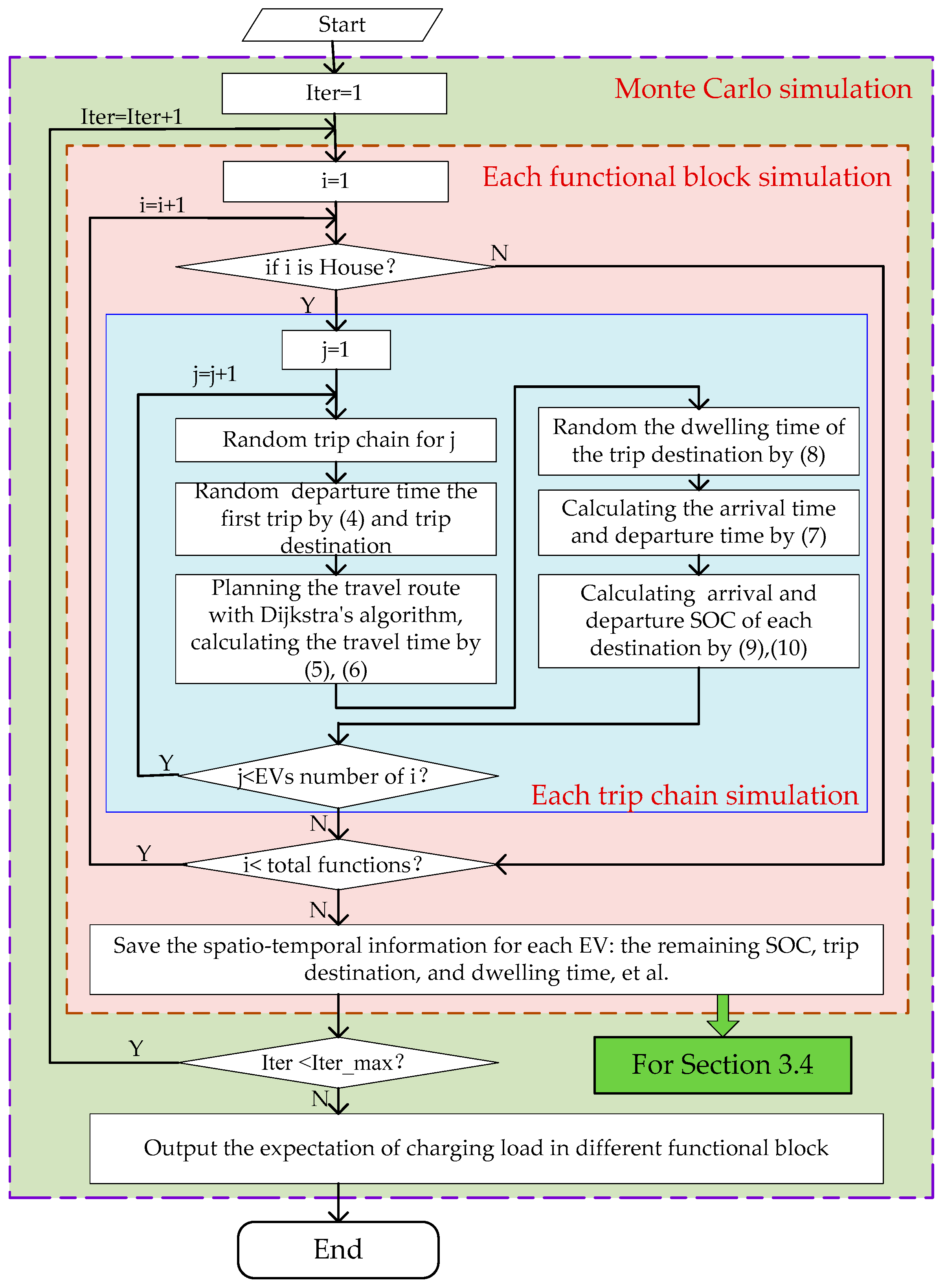
2.4. Travel Pattern Simulation
- Step 1.
- Obtain the survey results of residents from the transportation department and analyze the structure type of the vehicles’ trip chains.
- Step 2.
- The space movement state of the vehicle is determined according to the trip chain structure that the travel destinations of the vehicle are clear.
- Step 3.
- The first departure time of the vehicle is extracted by Equation (4) according to the type of travel chain Equation (2).
- Step 4.
- The travel path space and time between two consecutive trip destinations are determined by the path planning algorithm and Equations (3), (5), and (6).
- Step 5.
- Extract the dwell time of the different destinations according to Equation (8). The arrival and departure time are calculated by Equation (7).
- Step 6.
- The state of charge of the battery in each destination is judged and calculated by Equations (9) and (10).
3. Methodology for EVA-DRE
3.1. User Participation of EVs DR
3.1.1. Objective Participation Ability
3.1.2. Subjective Participation Willingness
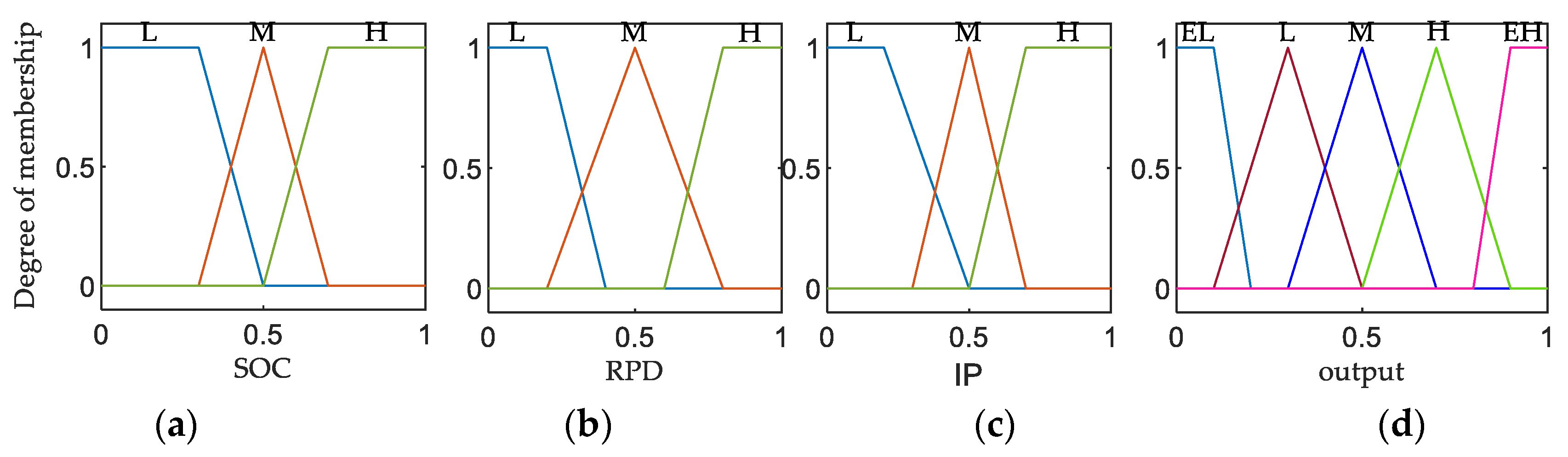
3.2. Responsive Mechanism Based on Fuzzy Rules
3.3. EVA-DR Energy and Capacity
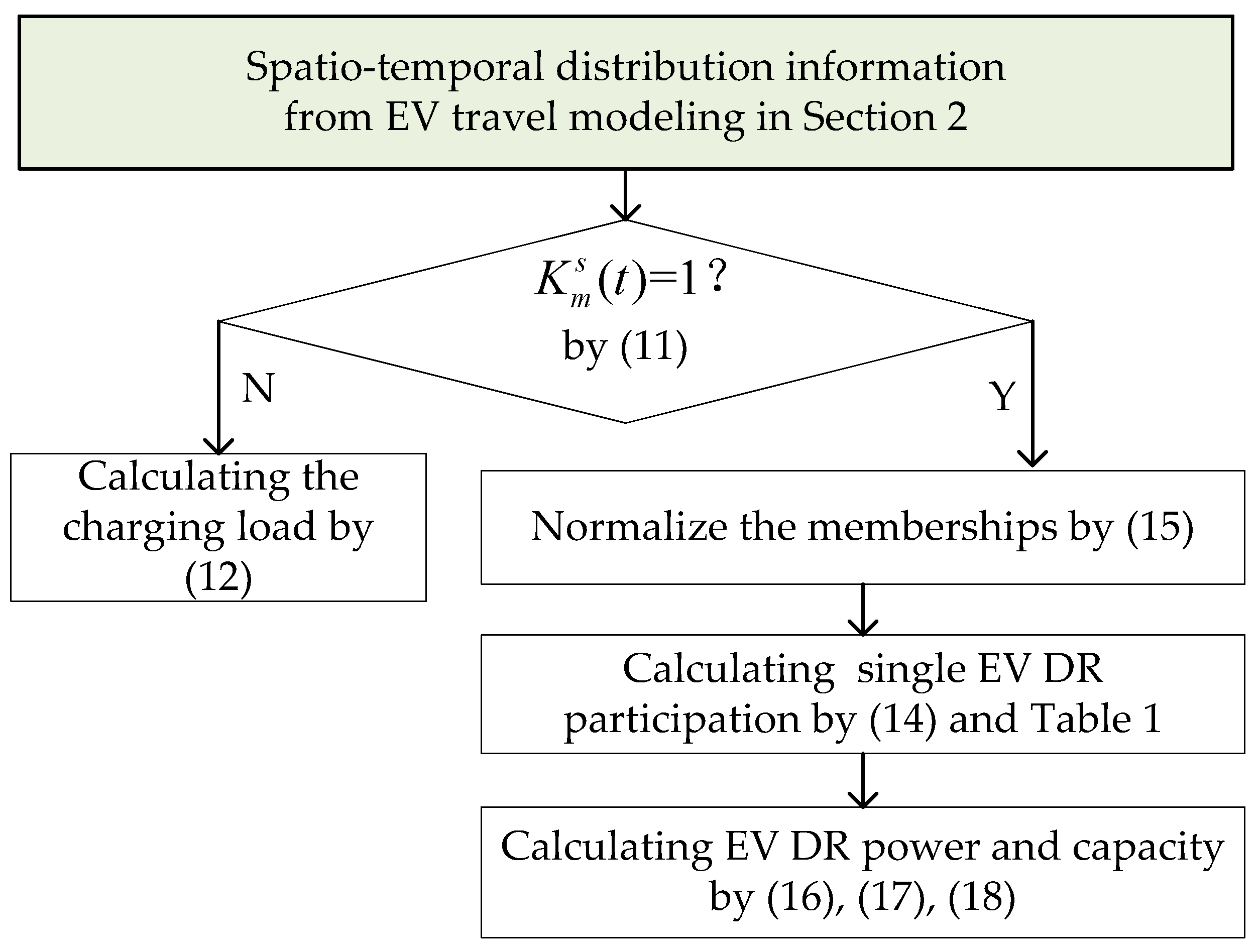
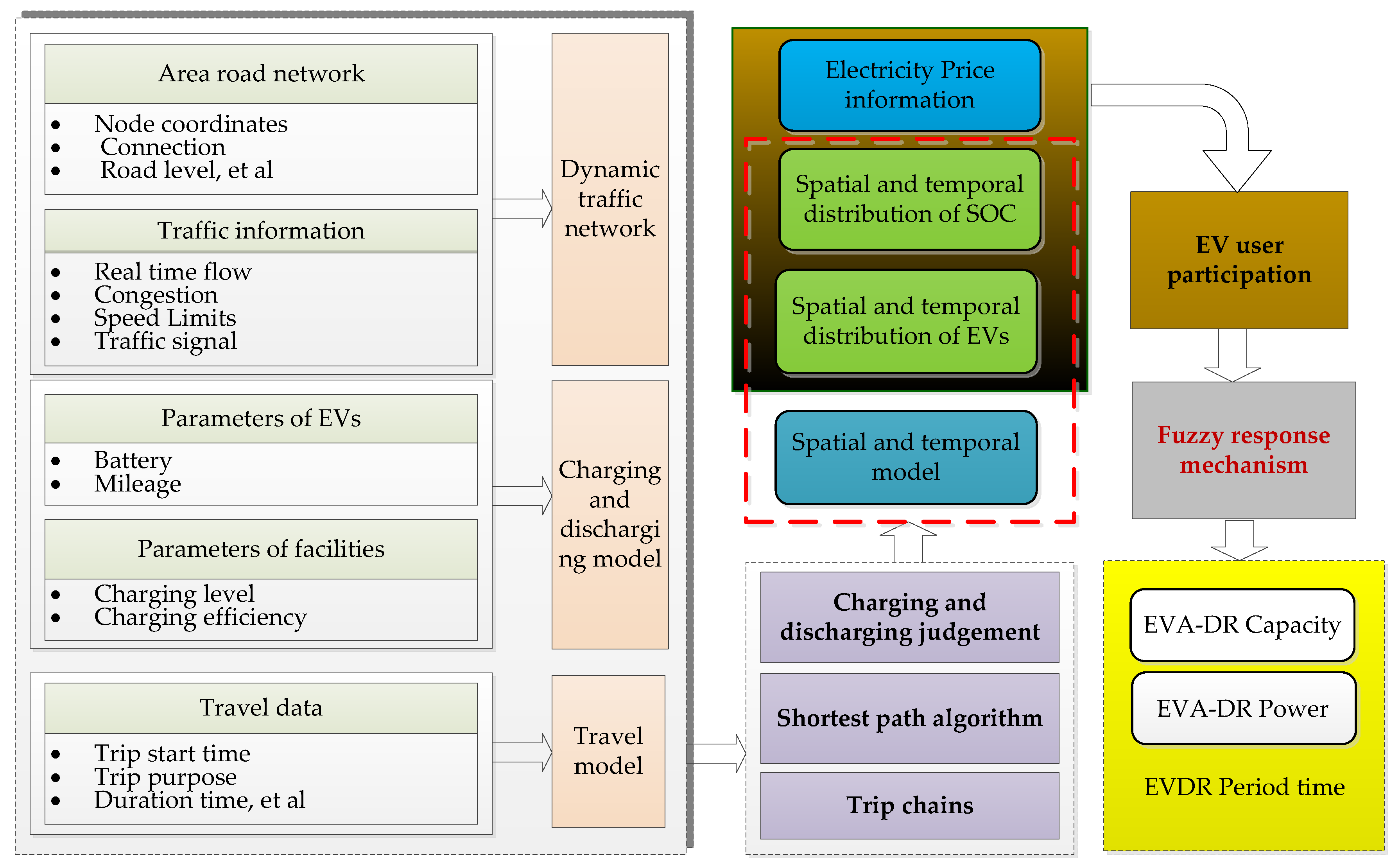
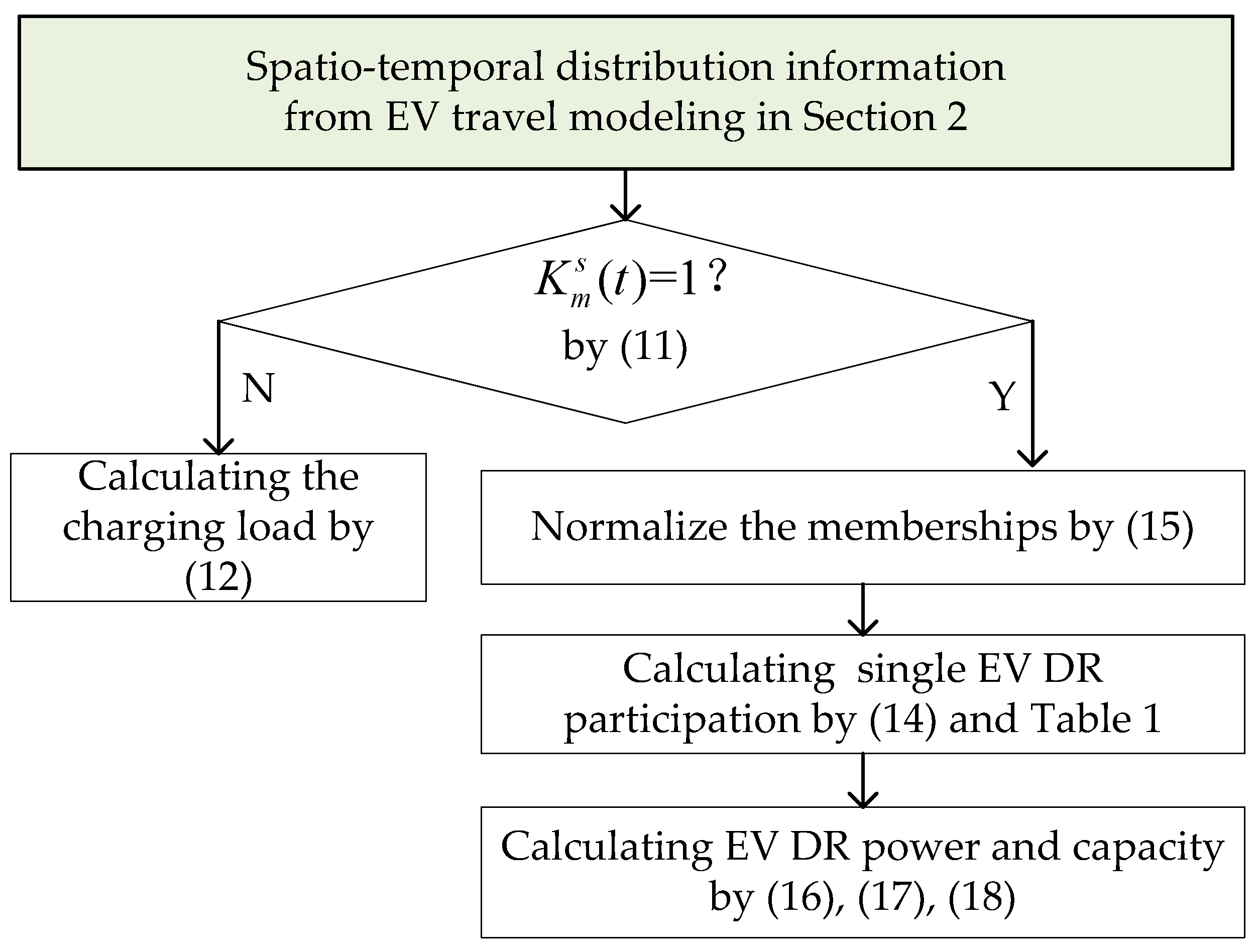
3.4. EVA-DRE Simulation Process
- Step 1.
- The temporal and spatial distribution of the EV and related parameters are obtained from Section 2.
- Step 2.
- For the participating EVs, calling the fuzzy algorithm to calculate the responsiveness of the EV.
- Step 3.
- Calculate the delayed charging power and V2G power and capacity of EVA according to the location of the current time of the vehicle to the corresponding EVA.
- Step 4.
- Accumulate the total power and capacity of EVA in the entire area.
4. Simulation Results and Analysis
4.1. Data Gathering and Parameter Settings
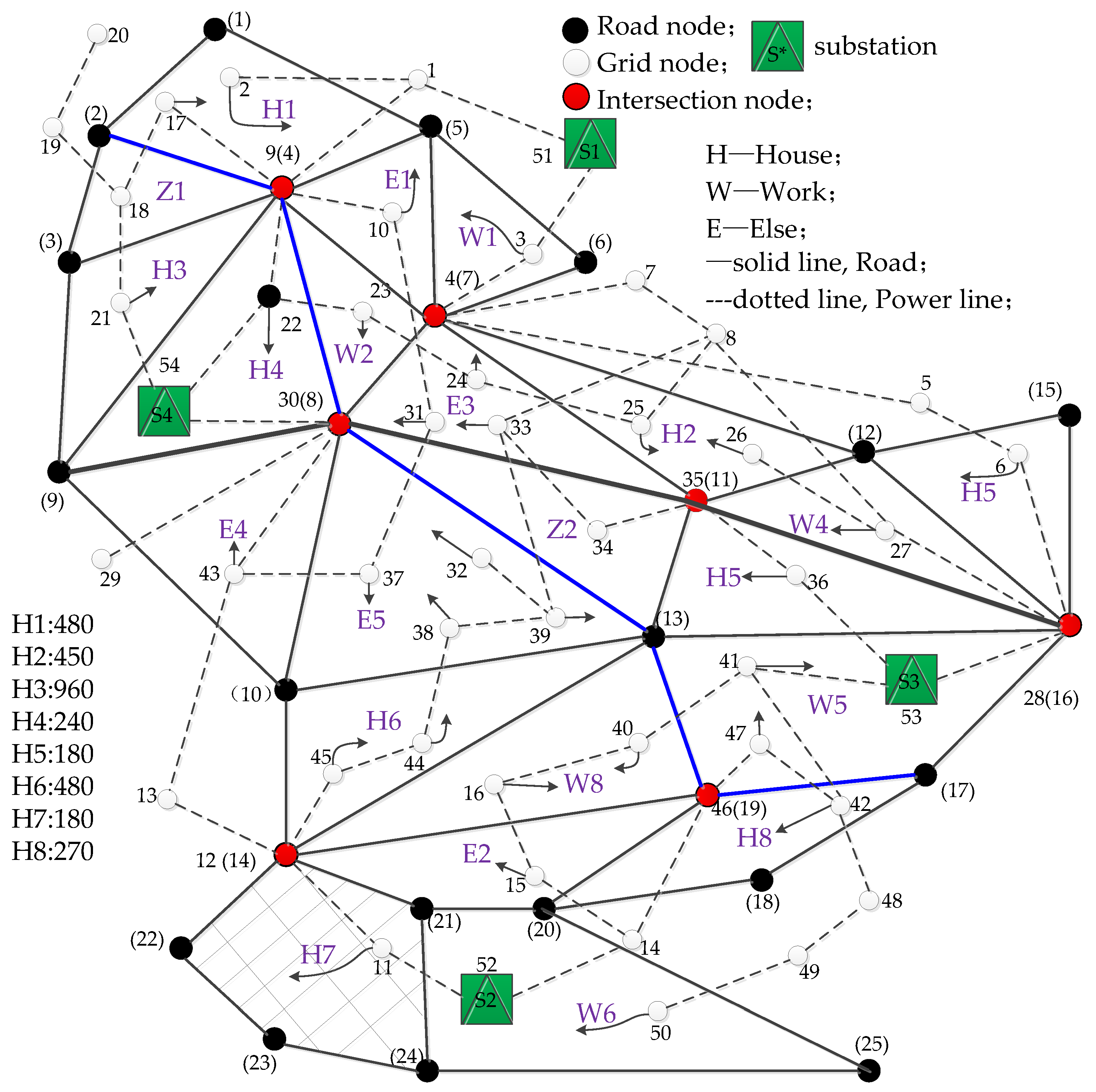
4.1.1. Detailed Road Network Information
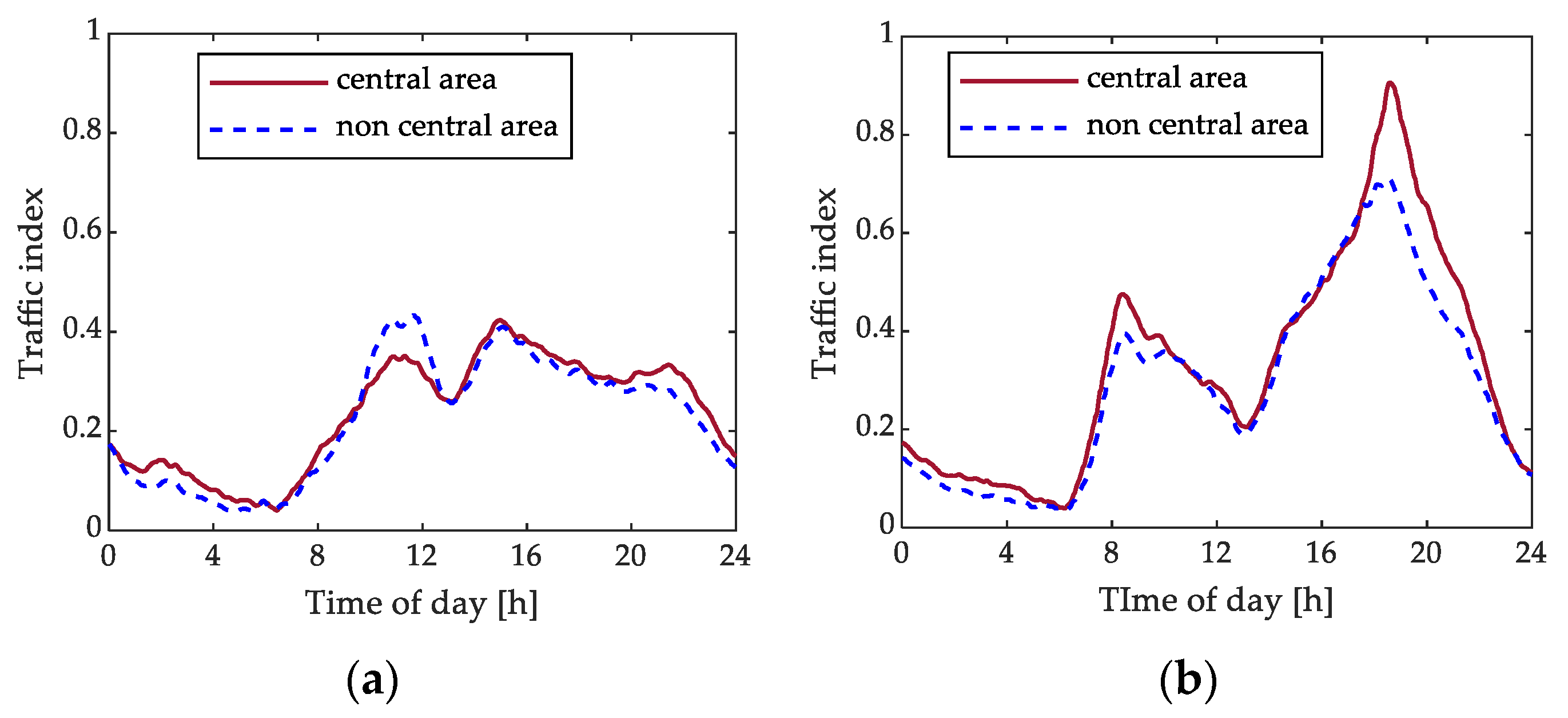
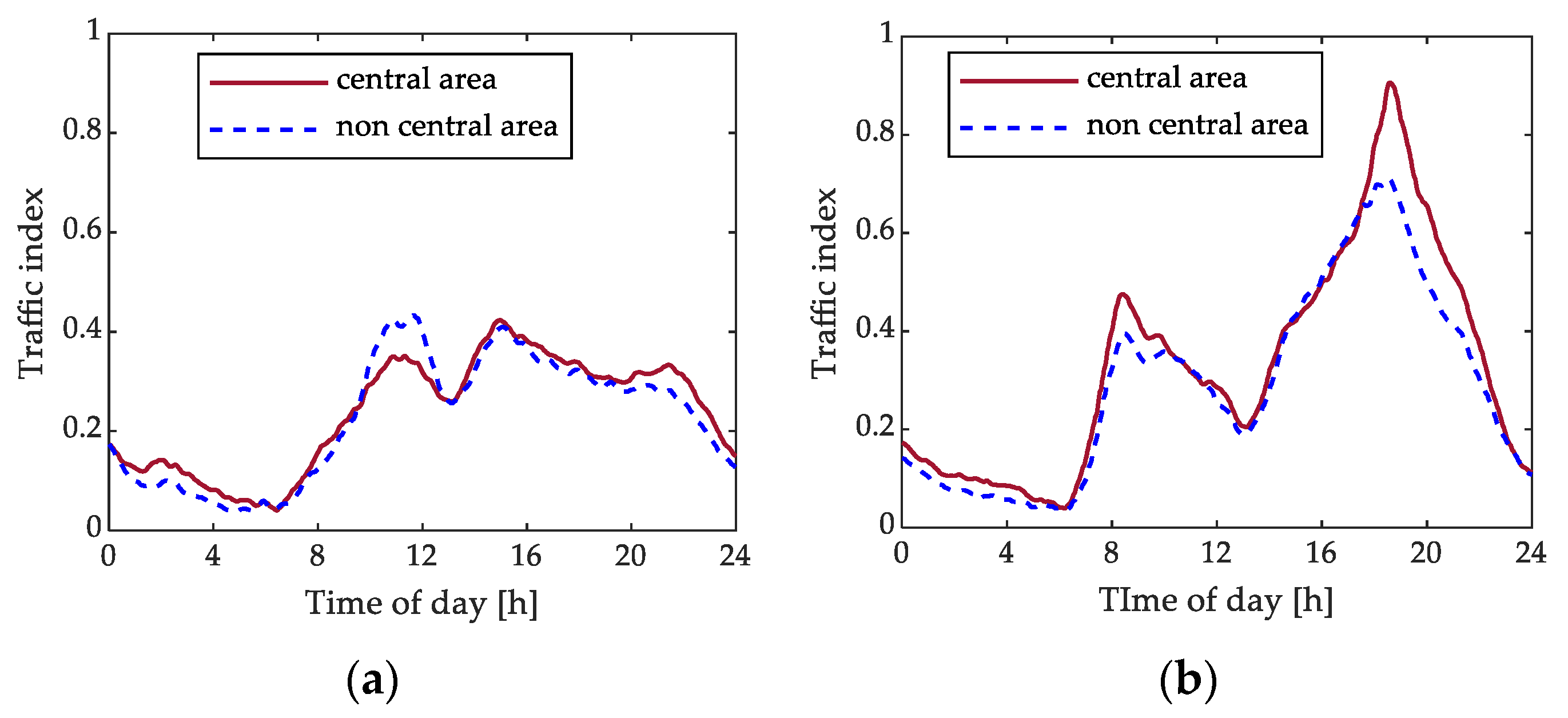
4.1.2. Traffic Information
4.1.3. EVs Parameters
4.1.4. Resident Travel Parameters
4.1.5. Incentive Price Information
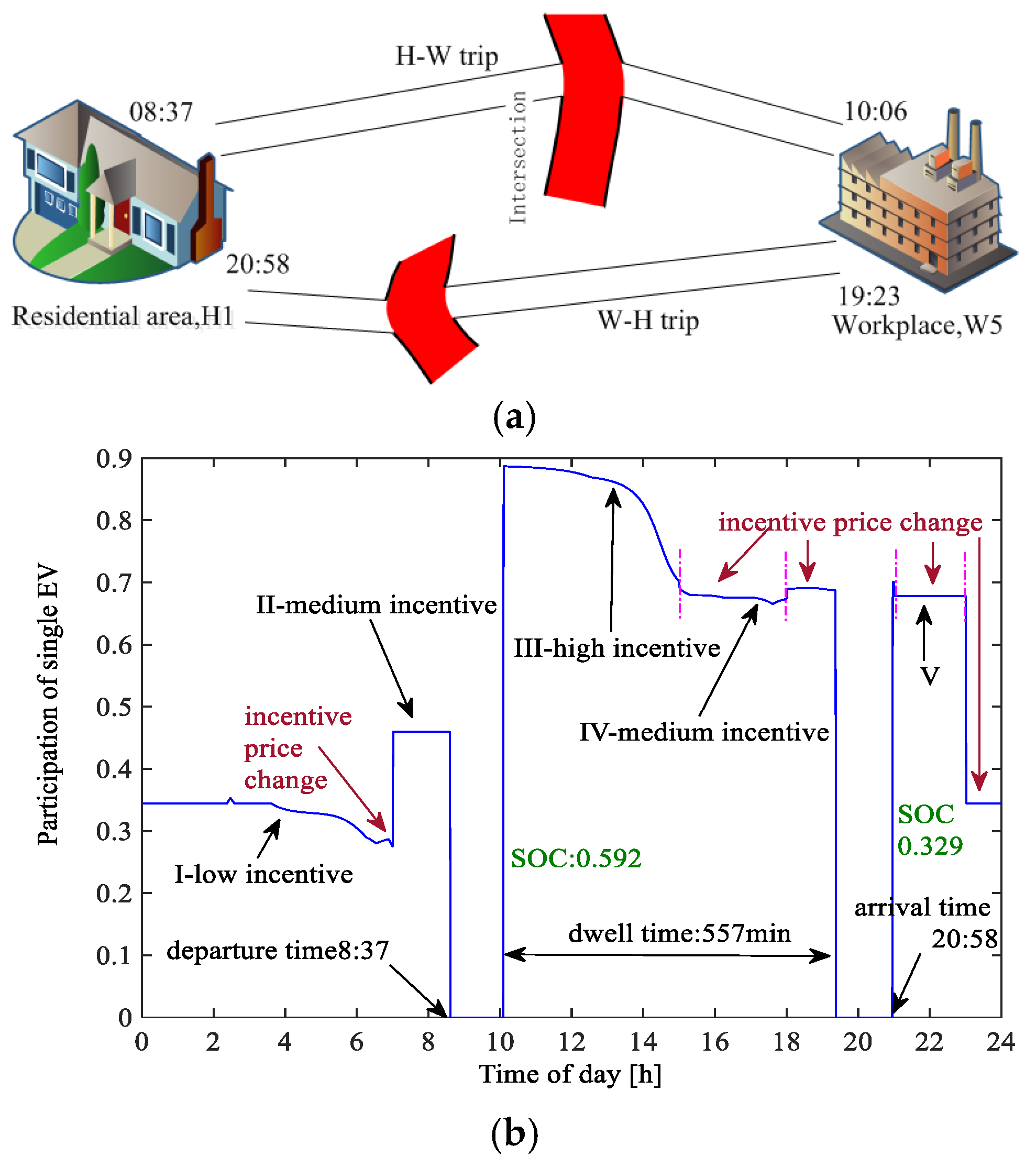
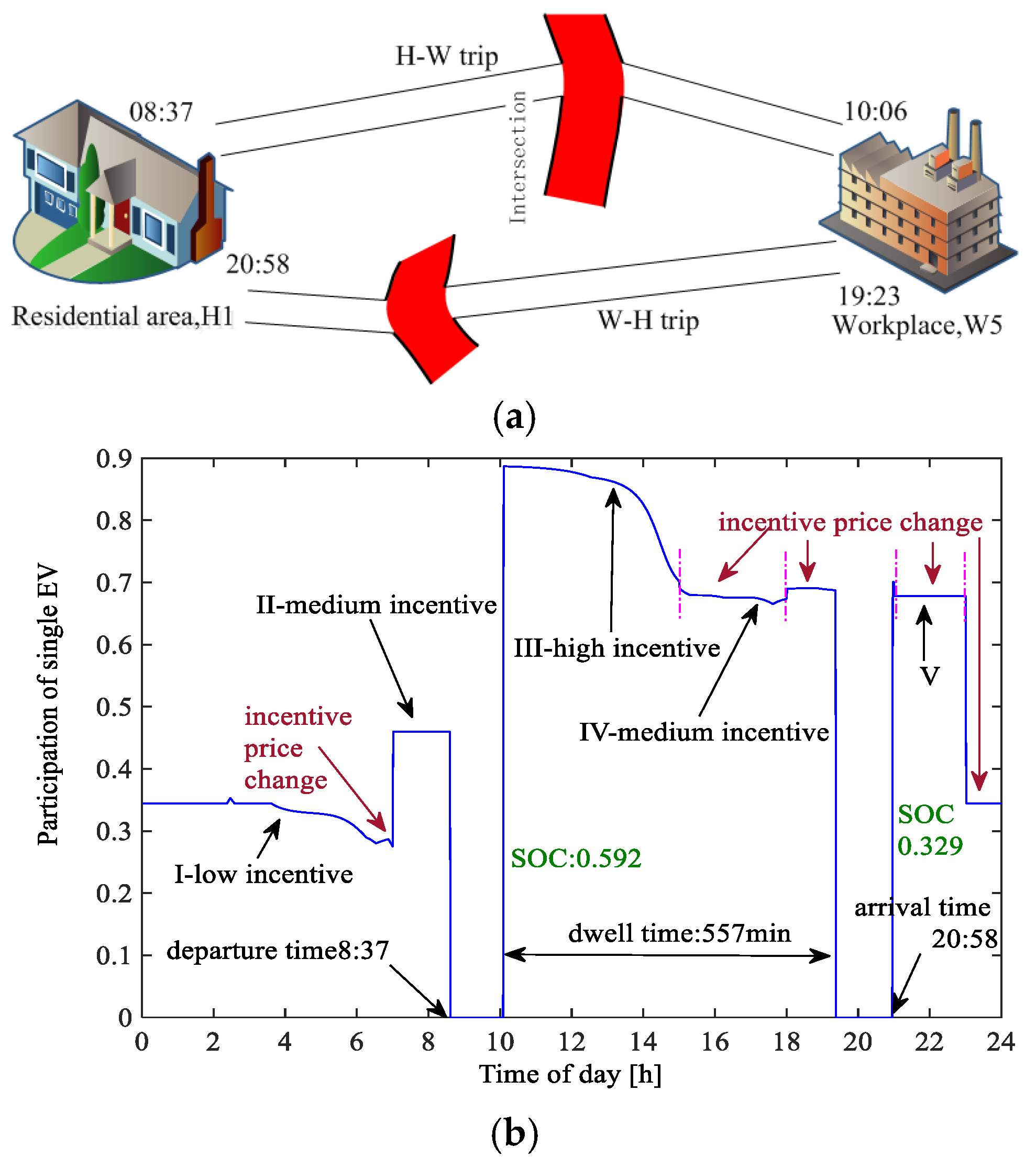
4.2. Simulation Result of a Single EV DR Potential
4.3. Validations
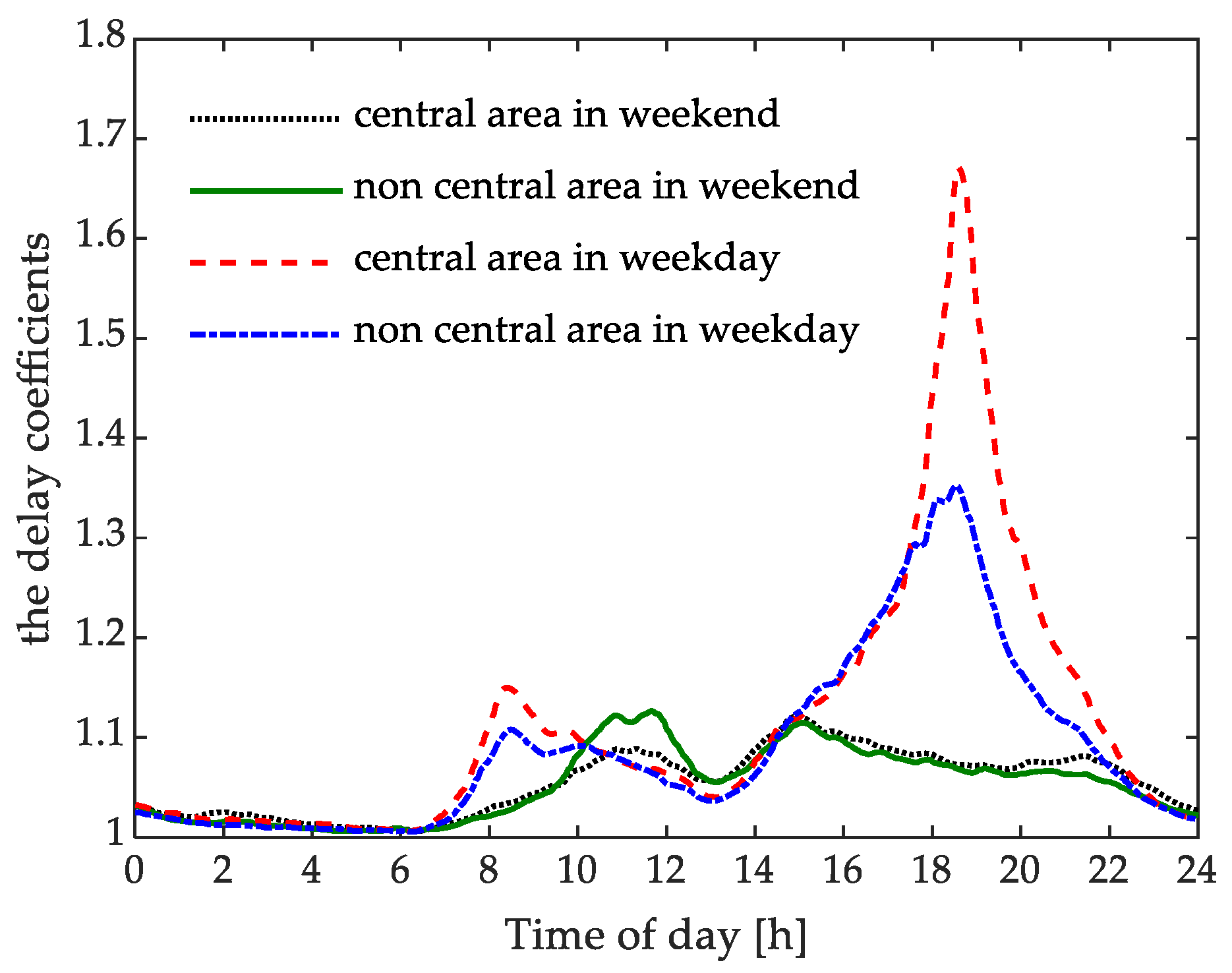
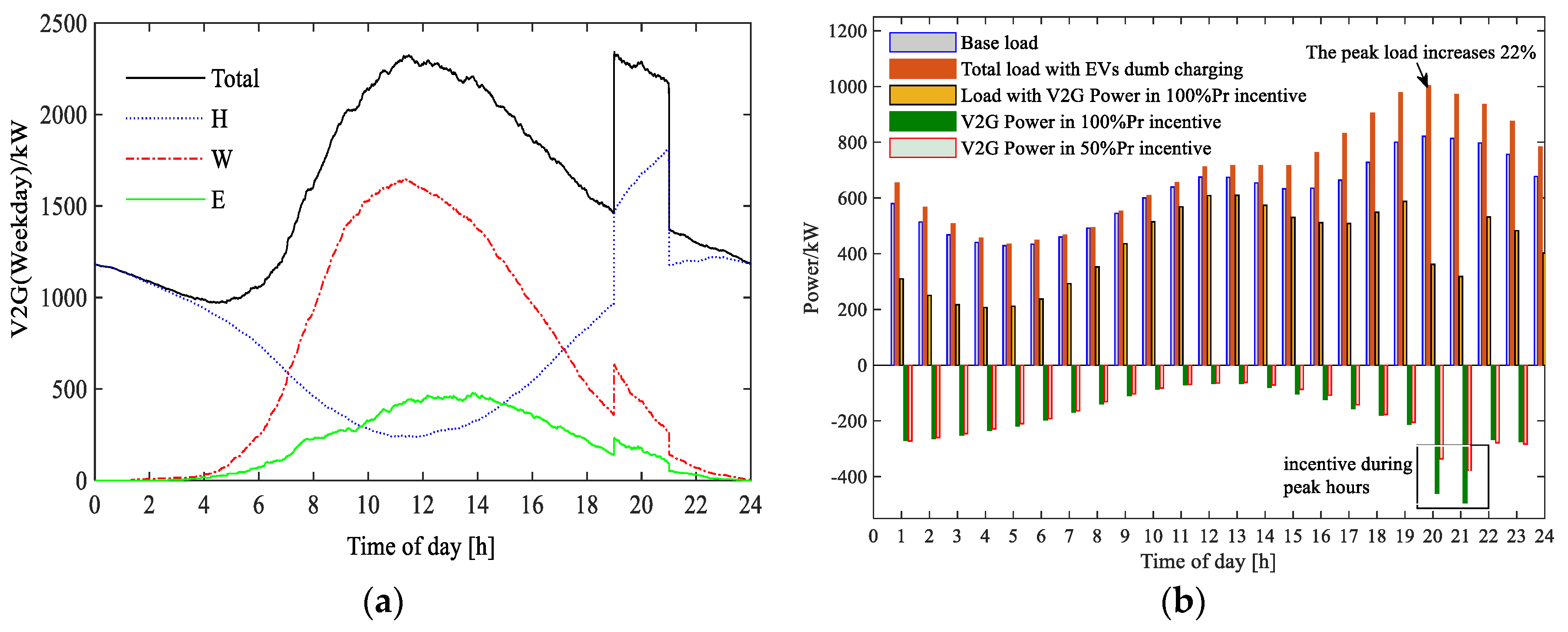
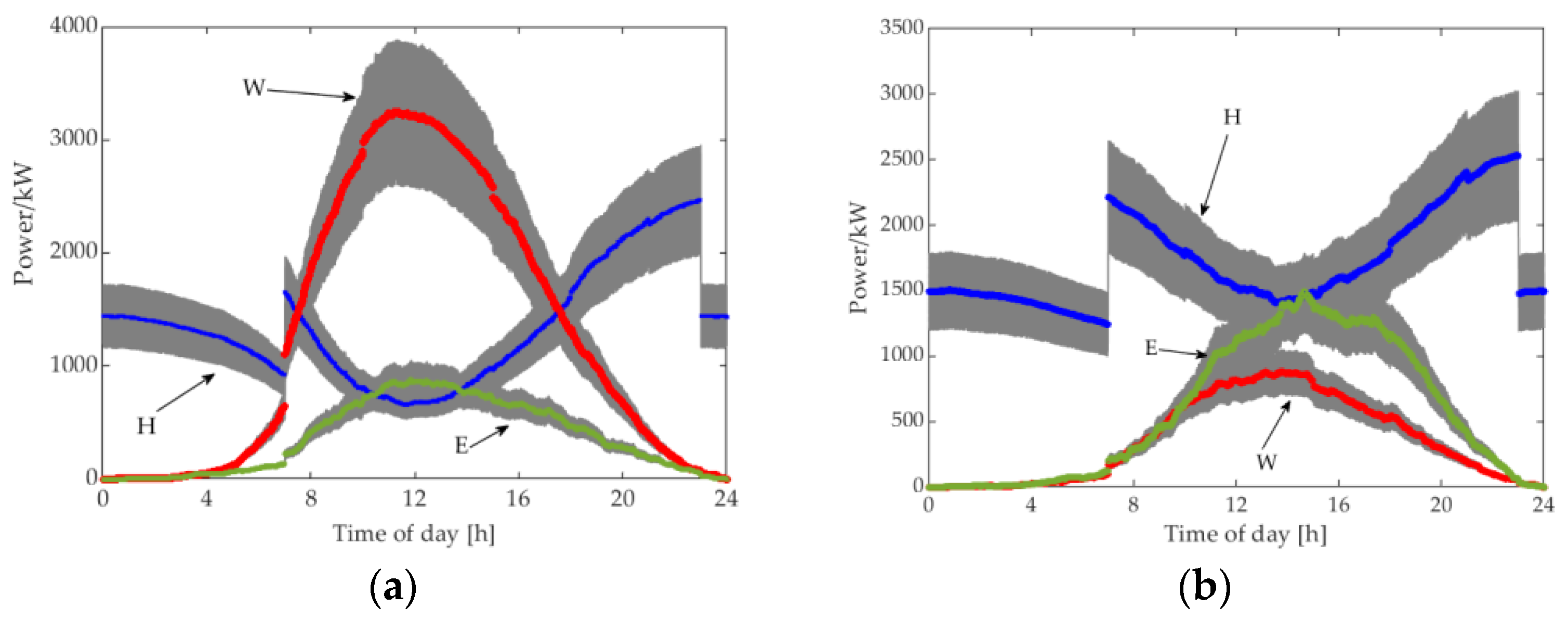
4.3.1. Workdays VS Weekends
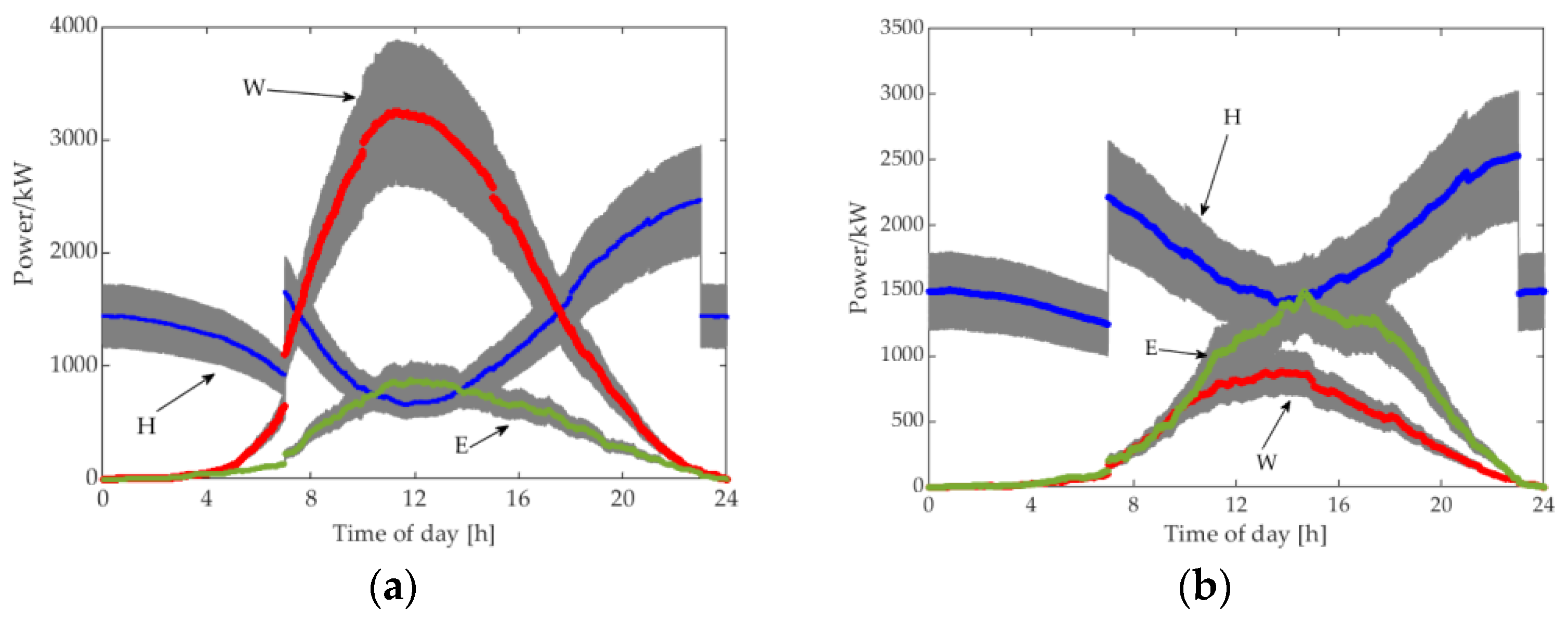
4.3.2. DRN VS Static Road Network (SRN)
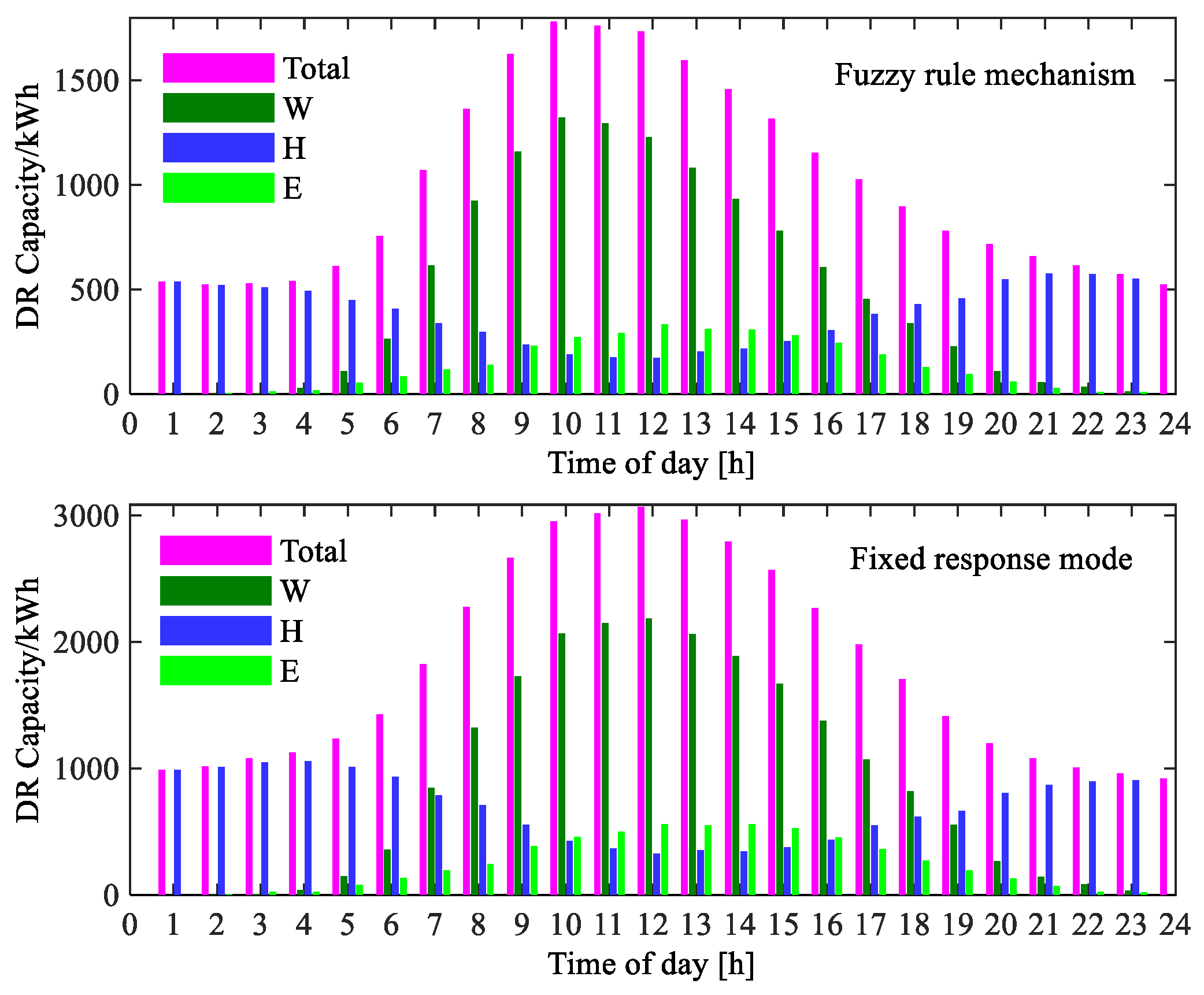
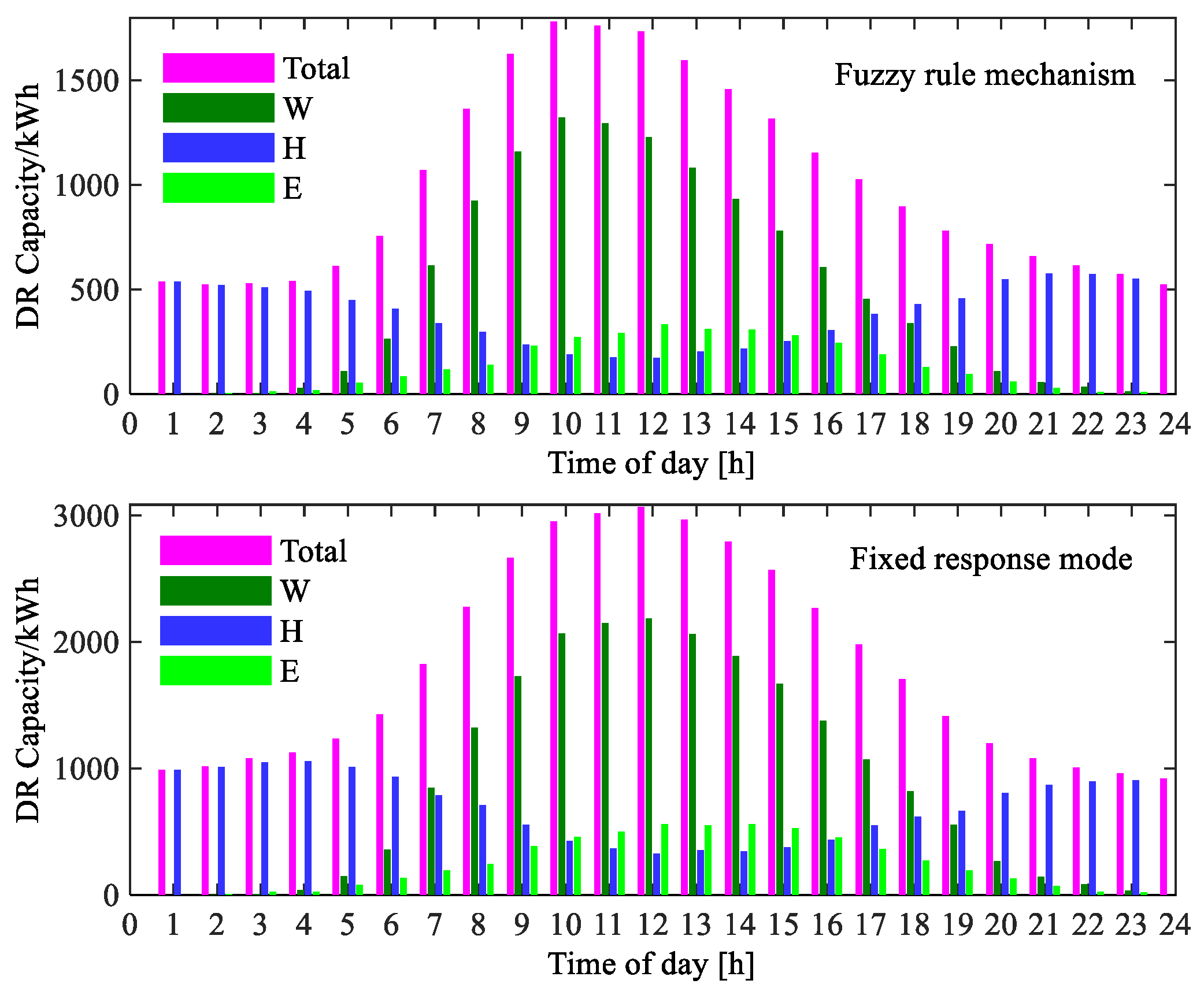
4.3.3. Different Response Mechanism
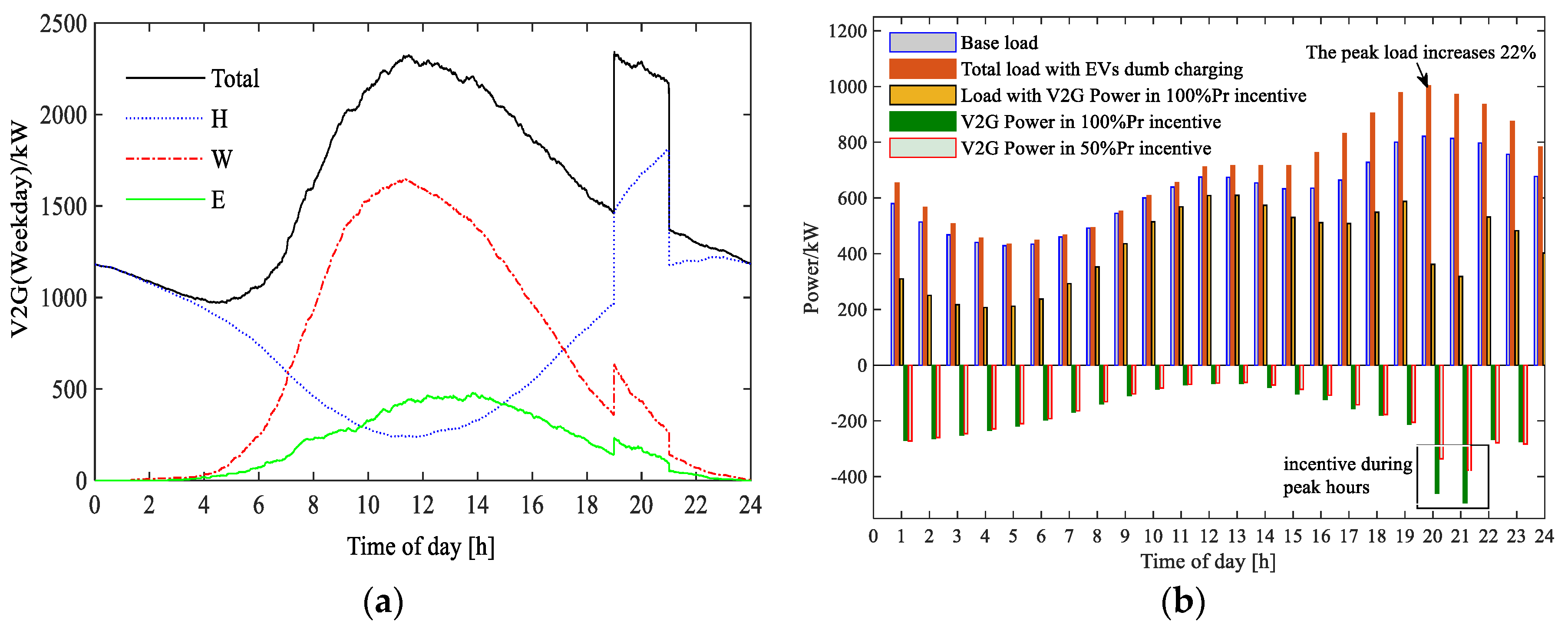
4.3.4. Different Incentive Price
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Boulanger, A.G.; Chu, A.C.; Maxx, S.; Waltz, D.L. Vehicle electrification: Status and issues. Proc. IEEE 2011, 99, 1116–1138. [Google Scholar] [CrossRef]
- Islam, N.; Bloemink, J. Bangladesh’s energy crisis: A summary of challenges and smart grid-based solutions. In Proceedings of the 2018 2nd International Conference on Smart Grid and Smart Cities (ICSGSC), Kuala Lumpur, Malaysia, 12–14 August 2018; pp. 111–116. [Google Scholar]
- Gerossier, A.; Girard, R.; Kariniotakis, G. Modeling and forecasting electric vehicle consumption profiles. Energies 2019, 12, 1341. [Google Scholar] [CrossRef]
- Canizes, B.; Soares, J.; Costa, A.; Pinto, T.; Lezama, F.; Novais, P.; Vale, Z. Electric vehicles’ user charging behaviour simulator for a smart city. Energies 2019, 12, 1470. [Google Scholar] [CrossRef]
- Ammous, M.; Belakaria, S.; Sorour, S.; Abdel-Rahim, A. Optimal cloud-based routing with in-route charging of mobility-on-demand electric vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 1–13. [Google Scholar] [CrossRef]
- Stüdli, S.; Crisostomi, E.; Middleton, R.; Shorten, R. A flexible distributed framework for realising electric and plug-in hybrid vehicle charging policies. Int. J. Control 2012, 85, 1130–1145. [Google Scholar] [CrossRef]
- Carli, R.; Dotoli, M. A decentralized control strategy for optimal charging of electric vehicle fleets with congestion management. In Proceedings of the 2017 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI), Bari, Italy, 18–20 September 2017; pp. 63–67. [Google Scholar]
- Battistelli, C. Demand response program for electric vehicle service with physical aggregators. In Proceedings of the IEEE PES ISGT Europe 2013, Copenhagen, Denmark, 6–9 October 2013; pp. 1–5. [Google Scholar]
- Develder, C.; Sadeghianpourhamami, N.; Strobbe, M.; Refa, N. Quantifying flexibility in EV charging as DR potential: Analysis of two real-world data sets. In Proceedings of the 2016 IEEE International Conference on Smart Grid Communications (SmartGridComm), Sydney, Australia, 6–9 November 2016; pp. 600–605. [Google Scholar]
- Acquah, M.A.; Han, S. Online building load management control with plugged-in electric vehicles considering uncertainties. Energies 2019, 12, 1436. [Google Scholar] [CrossRef]
- Aghaei, J.; Alizadeh, M. Critical peak pricing with load control demand response program in unit commitment problem. IET Gener. Transm. Distrib. 2013, 7, 681–690. [Google Scholar] [CrossRef]
- Rassaei, F.; Soh, W.; Chua, K. Demand response for residential electric vehicles with random usage patterns in smart grids. IEEE Trans. Sustain. Energy 2015, 6, 1367–1376. [Google Scholar] [CrossRef]
- Erdinc, O.; Paterakis, N.G.; Mendes, T.D.P.; Bakirtzis, A.G.; Catalão, J.P.S. Smart household operation considering bi-directional EV and ESS utilization by real-time pricing-based DR. IEEE Trans. Smart Grid 2015, 6, 1281–1291. [Google Scholar] [CrossRef]
- Izadkhast, S.; Garcia-Gonzalez, P.; Frìas, P.; Ramìrez-Elizondo, L.; Bauer, P. An aggregate model of plug-in electric vehicles including distribution network characteristics for primary frequency control. IEEE Trans. Power Syst. 2016, 31, 2987–2998. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, S.; Zhao, X.; Han, S.; Wang, H.; Zhang, Q. Demand response capability of V2G based electric vehicles in distribution networks. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Torino, Italy, 26–29 September 2017; pp. 1–6. [Google Scholar]
- Wang, J.; Shi, Y.; Zhou, Y. Intelligent demand response for industrial energy management considering thermostatically controlled loads and EVs. IEEE Trans. Ind. Inform. 2018, 1. [Google Scholar] [CrossRef]
- Şengör, I.; Erdinç, O.; Yener, B.; Taşcikaraoglu, A.; Catalão, J.P.S. Optimal energy management of EV parking lots under peak load reduction based dr programs considering uncertainty. IEEE Trans. Sustain. Energy 2018, 1. [Google Scholar] [CrossRef]
- Peng, W.; Dong, G.; Yang, K.; Su, J. A random road network model and its effects on topological characteristics of mobile delay-tolerant networks. IEEE Trans. Mob. Comput. 2014, 13, 2706–2718. [Google Scholar] [CrossRef]
- Chen, L.; Nie, Y.; Zhong, Q. A model for electric vehicle charging load forecasting based on trip chains. Trans. China Electrotech. Soc. 2015, 30, 216–225. [Google Scholar]
- Gong, L.; Cao, W.; Liu, K.; Zhao, J.; Li, X. Spatial and temporal optimization strategy for plug-in electric vehicle charging to mitigate impacts on distribution network. Energies 2018, 11, 1373. [Google Scholar] [CrossRef]
- Li, M.; Lenzen, M.; Keck, F.; McBain, B.; Rey-Lescure, O.; Li, B.; Jiang, C. GIS-based probabilistic modeling of BEV charging load for Australia. IEEE Trans. Smart Grid 2018, 1. [Google Scholar] [CrossRef]
- Castillo, E.; Calviño, A.; Sánchez-Cambronero, S.; Lo, H.K. A multiclass user equilibrium model considering overtaking across classes. IEEE Trans. Intell. Transp. Syst. 2013, 14, 928–942. [Google Scholar] [CrossRef]
- Lu, C.; Zhao, F.; Hadi, M. A travel time estimation method for planning models considering signalized intersections. In Proceedings of the ICCTP 2010: Integrated Transportation Systems: Green, Intelligent, Reliable, Beijing, China, 4–8 August 2010; pp. 1993–2000. [Google Scholar]
- Amini, M.H.; Karabasoglu, O. Optimal operation of interdependent power systems and electrified transportation networks. arXiv, 2018; arXiv:1701.03487. [Google Scholar]
- Ma, Z.; Callaway, D.S.; Hiskens, I.A. Decentralized charging control of large populations of plug-in electric vehicles. IEEE Trans. Control Syst. Technol. 2013, 21, 67–78. [Google Scholar] [CrossRef]
- Parise, F.; Colombino, M.; Grammatico, S.; Lygeros, J. Mean field constrained charging policy for large populations of Plug-in Electric Vehicles. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 5101–5106. [Google Scholar]
- Carli, R.; Dotoli, M. A distributed control algorithm for waterfilling of networked control systems via consensus. IEEE Control Syst. Lett. 2017, 1, 334–339. [Google Scholar] [CrossRef]
- Hodgson, M.J. A flow-capturing location-allocation model. Geogr. Anal. 1990, 22, 270–279. [Google Scholar] [CrossRef]
- Miranda, V.; Ranito, J.V.; Proenca, L.M. Genetic algorithms in optimal multistage distribution network planning. IEEE Trans. Power Syst. 1994, 9, 1927–1933. [Google Scholar] [CrossRef]
- U.S. Department of Transportation Federal Highway Administration. 2017 National Household Travel Survey; U.S. Department of Transportation Federal Highway Administration: Washington, DC, USA, 2017.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Intervals | 1 | 2 | … | k | … | |
|---|---|---|---|---|---|---|
| Road Sections/links | ||||||
| 1 | t1(1) | t1(2) | … | t1(k) | … | |
| 2 | t2(1) | t2(2) | … | t2(k) | … | |
| … | … | … | … | … | … | |
| r | tr(1) | tr(2) | … | tr(k) | … | |
| … | … | … | … | … | … | |
| Situation | Remaining SOC | Whether to Meet the Next Trip Demand | Dwelling Time | Enough Time to Replenish | Objective Participation Ability | |
|---|---|---|---|---|---|---|
| Cases | ||||||
| A | Sufficient | Yes | - | - | 1 | |
| B | Insufficient | No | Long | Yes | 1 | |
| C | Insufficient | No | Short | No | 0 | |
| If SOC Is | AND RPD Is | AND IP Is | Then the Participation of EVs DR Is | If SOC Is | AND RPD Is | AND IP Is | Then the Participation of EVs DR Is |
|---|---|---|---|---|---|---|---|
| L | L | L | EL | H | M | L | M |
| L | L | M | L | H | M | M | H |
| L | L | H | M | H | M | H | EH |
| M | L | L | L | L | H | L | L |
| M | L | M | M | L | H | M | H |
| M | L | H | M | L | H | H | H |
| H | L | L | L | M | H | L | M |
| H | L | M | M | M | H | M | H |
| H | L | H | H | M | H | H | EH |
| L | M | L | L | H | H | L | M |
| L | M | M | M | H | H | M | H |
| L | M | H | H | H | H | H | EH |
| M | M | L | L | ||||
| M | M | M | M | ||||
| M | M | H | H |
| No. of Link | Original Node | Destination Node | Traffic Light | Road Grade | Length of Link | Area |
|---|---|---|---|---|---|---|
| 1 | 1 | 5 | 1 | 3 | 5 | 0 |
| 2 | 1 | 2 | 1 | 3 | 4 | 0 |
| 3 | 2 | 3 | 1 | 3 | 3 | 0 |
| 4 | 2 | 4 | 1 | 2 | 4 | 1 |
| 5 | 3 | 4 | 1 | 3 | 4 | 0 |
| 6 | 3 | 9 | 1 | 3 | 4 | 0 |
| 7 | 4 | 5 | 1 | 3 | 3 | 0 |
| 8 | 4 | 7 | 1 | 3 | 5 | 1 |
| 9 | 4 | 8 | 1 | 2 | 5 | 1 |
| 10 | 4 | 9 | 1 | 3 | 7 | 1 |
| 11 | 5 | 6 | 1 | 3 | 5 | 0 |
| 12 | 5 | 7 | 1 | 2 | 5 | 0 |
| 13 | 6 | 7 | 1 | 3 | 3 | 0 |
| 14 | 7 | 8 | 1 | 2 | 3 | 1 |
| 15 | 7 | 11 | 1 | 3 | 8 | 1 |
| 16 | 7 | 12 | 1 | 3 | 9 | 0 |
| 17 | 8 | 9 | 0 | 1 | 6 | 1 |
| 18 | 8 | 10 | 1 | 2 | 6 | 1 |
| 19 | 8 | 11 | 0 | 1 | 7 | 1 |
| 20 | 8 | 13 | 1 | 2 | 7 | 1 |
| 21 | 9 | 10 | 1 | 3 | 6 | 0 |
| 22 | 10 | 13 | 1 | 3 | 6 | 0 |
| 23 | 10 | 14 | 1 | 2 | 3 | 0 |
| 24 | 11 | 12 | 1 | 3 | 2 | 0 |
| 25 | 11 | 13 | 1 | 3 | 3 | 1 |
| 26 | 11 | 16 | 0 | 1 | 7 | 1 |
| 27 | 12 | 15 | 1 | 3 | 4 | 0 |
| 28 | 12 | 16 | 1 | 3 | 4 | 0 |
| 29 | 13 | 14 | 1 | 3 | 7 | 0 |
| 30 | 13 | 16 | 1 | 3 | 7 | 0 |
| 31 | 13 | 19 | 1 | 2 | 4 | 0 |
| 32 | 14 | 19 | 1 | 3 | 7 | 0 |
| 33 | 14 | 21 | 1 | 3 | 2 | 0 |
| 34 | 14 | 22 | 1 | 3 | 4 | 0 |
| 35 | 15 | 16 | 1 | 3 | 4 | 0 |
| 36 | 16 | 17 | 1 | 3 | 4 | 0 |
| 37 | 17 | 18 | 1 | 3 | 3 | 0 |
| 38 | 17 | 19 | 1 | 2 | 3 | 0 |
| 39 | 18 | 20 | 1 | 3 | 3 | 0 |
| 40 | 19 | 20 | 1 | 3 | 3 | 0 |
| 41 | 20 | 21 | 1 | 3 | 2 | 0 |
| 42 | 20 | 25 | 1 | 3 | 4 | 0 |
| 43 | 21 | 24 | 1 | 3 | 5 | 0 |
| 44 | 22 | 23 | 1 | 3 | 3 | 0 |
| 45 | 23 | 24 | 1 | 3 | 3 | 0 |
| 46 | 24 | 25 | 1 | 3 | 8 | 0 |
| Road Grade | FT | MR | SR | BR |
|---|---|---|---|---|
| Free-flow speed (km/h) | 80 | 60 | 40 | 30 |
| Status | Congested | Medium Congested | Slow | Basically Smooth | Smooth |
|---|---|---|---|---|---|
| Index | 0.8–1.0 | 0.6–0.8 | 0.4–0.6 | 0.2–0.4 | 0.0–0.2 |
| Parameters | Trip Chains Penetration | First Departure Time | Parking (Dwelling) Time | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Type of Trip Chains | Workday | Weekend | Workday | Weekend | Workday | Weekend | |||
| H-W-H | 40% | 10% | |||||||
| H-E-H | 20% | 70% | |||||||
| H-W-E-H | 20% | 10% | |||||||
| H-E-W-H | 20% | 10% | |||||||
| Type | Time Slot | Incentive Price |
|---|---|---|
| Flat period | 7:00–10:00 & 15:00–18:00 & 21:00–23:00 | 0.6832 |
| Peak period | 10:00–15:00 & 18:00–21:00 | 1.0558 |
| Valley period | 23:00-Next day 7:00 | 0.3105 |
| Road Network | Travel Route | Arrival Time | Arrival SOC | Participation | |
|---|---|---|---|---|---|
| SRN | 19:00 | Path_S | 20:28 | 0.3667 | 0.8806 |
| 23:00 | Path_S | 23:48 | 0.3667 | 0.4143 | |
| DRN | 19:00 | Path_19 | 21:23 | 0.35 | 0.8437 |
| 23:00 | Path_23 | 00:31 | 0.3167 | 0.3661 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Zhang, Y.; Figueiredo, A. Spatio-Temporal Model for Evaluating Demand Response Potential of Electric Vehicles in Power-Traffic Network. Energies 2019, 12, 1981. https://doi.org/10.3390/en12101981
Chen L, Zhang Y, Figueiredo A. Spatio-Temporal Model for Evaluating Demand Response Potential of Electric Vehicles in Power-Traffic Network. Energies. 2019; 12(10):1981. https://doi.org/10.3390/en12101981
Chicago/Turabian StyleChen, Lidan, Yao Zhang, and Antonio Figueiredo. 2019. "Spatio-Temporal Model for Evaluating Demand Response Potential of Electric Vehicles in Power-Traffic Network" Energies 12, no. 10: 1981. https://doi.org/10.3390/en12101981
APA StyleChen, L., Zhang, Y., & Figueiredo, A. (2019). Spatio-Temporal Model for Evaluating Demand Response Potential of Electric Vehicles in Power-Traffic Network. Energies, 12(10), 1981. https://doi.org/10.3390/en12101981