Enhanced Threshold Point Calculation Algorithm for Switch Fault Diagnosis in Grid Connected 3-Phase AC–DC PWM Converters


Abstract
:1. Introduction
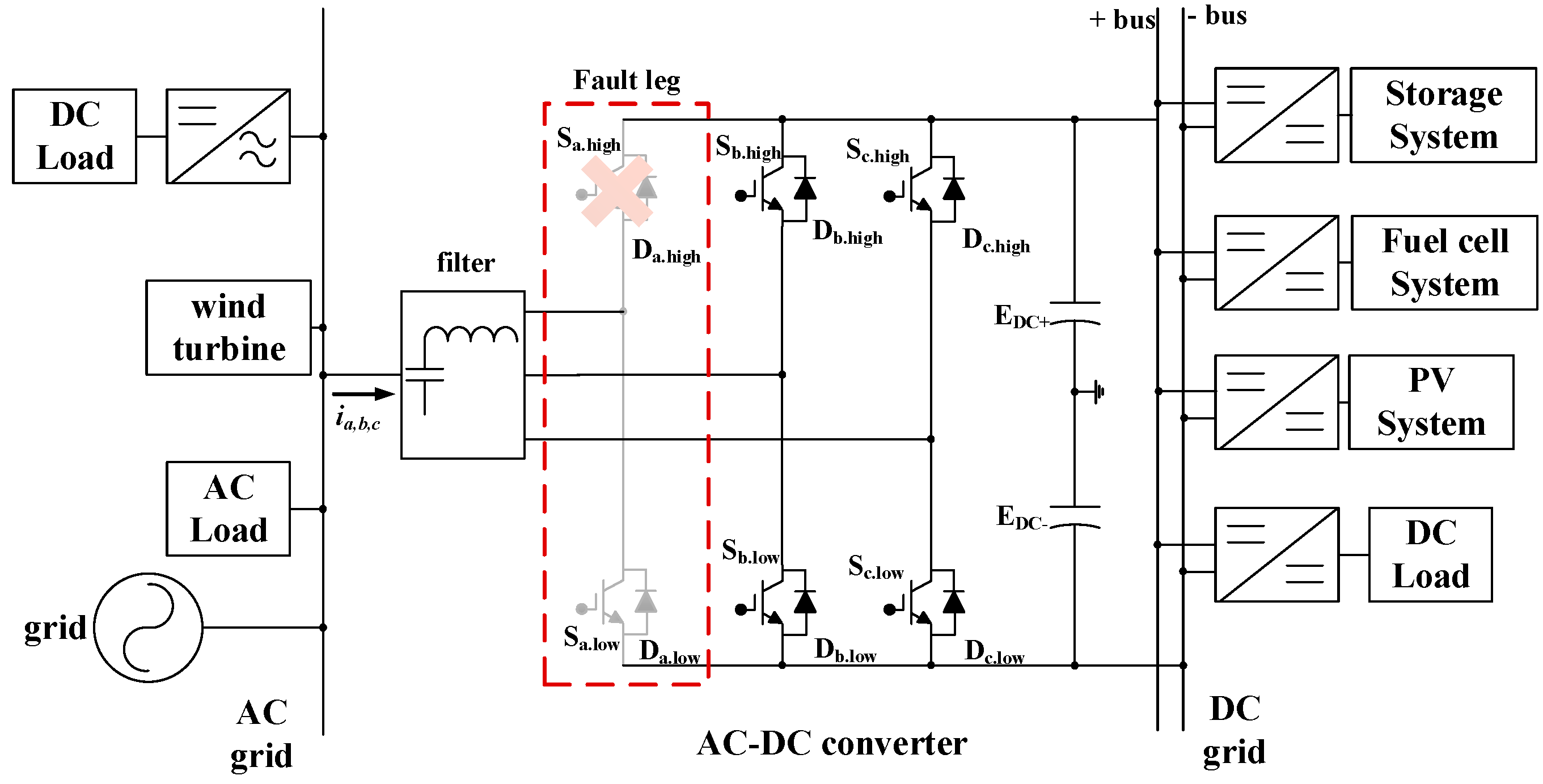
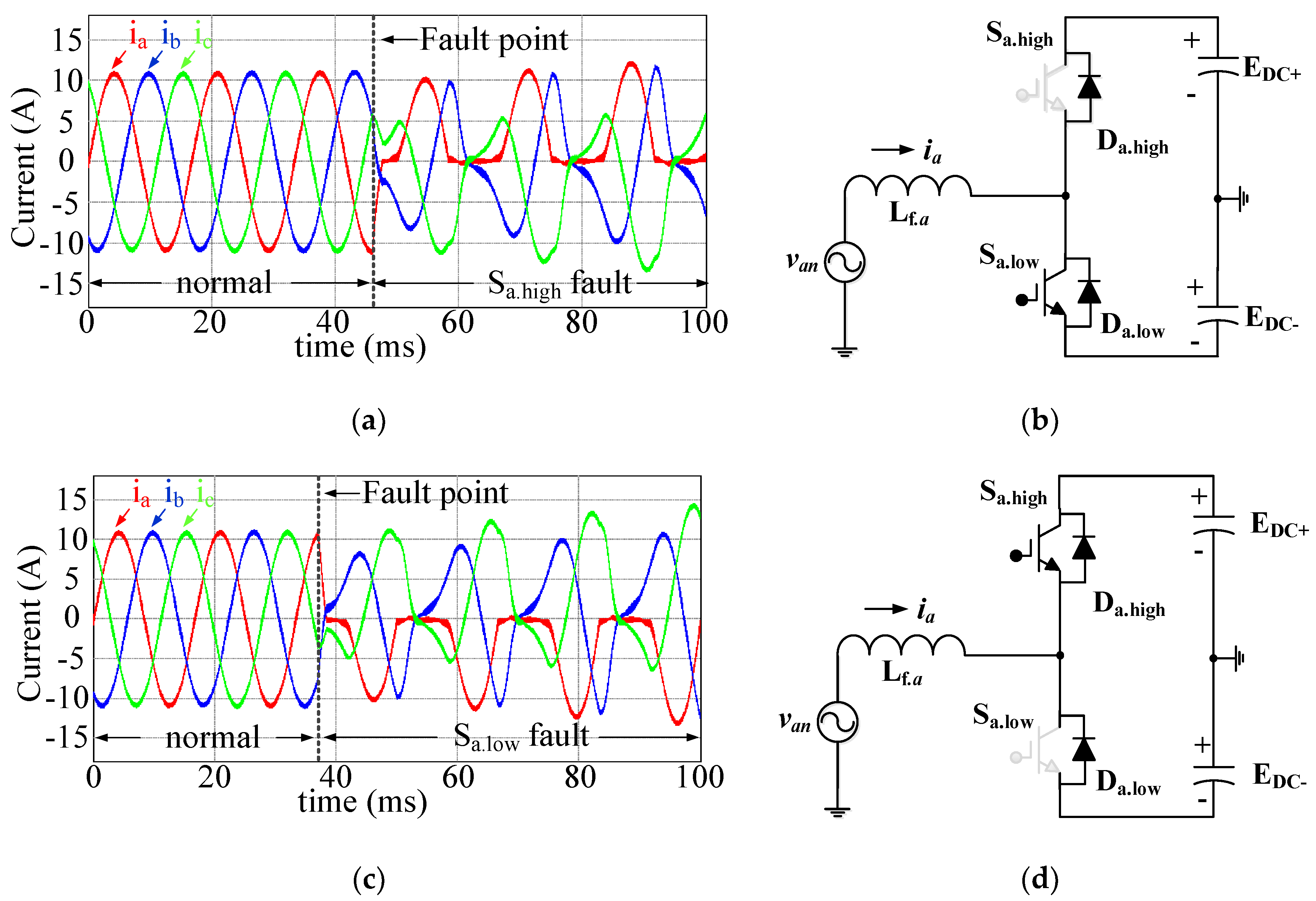
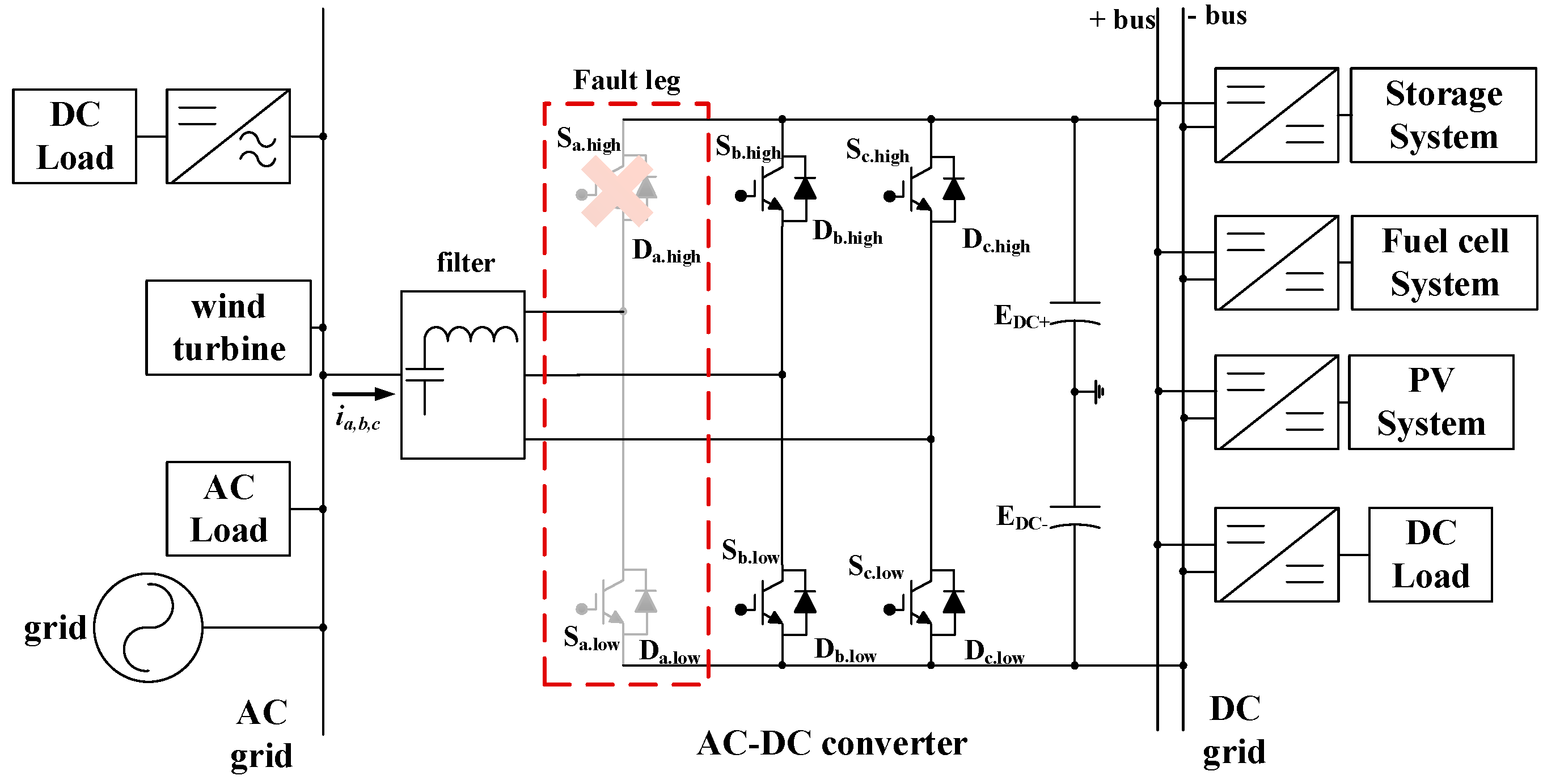
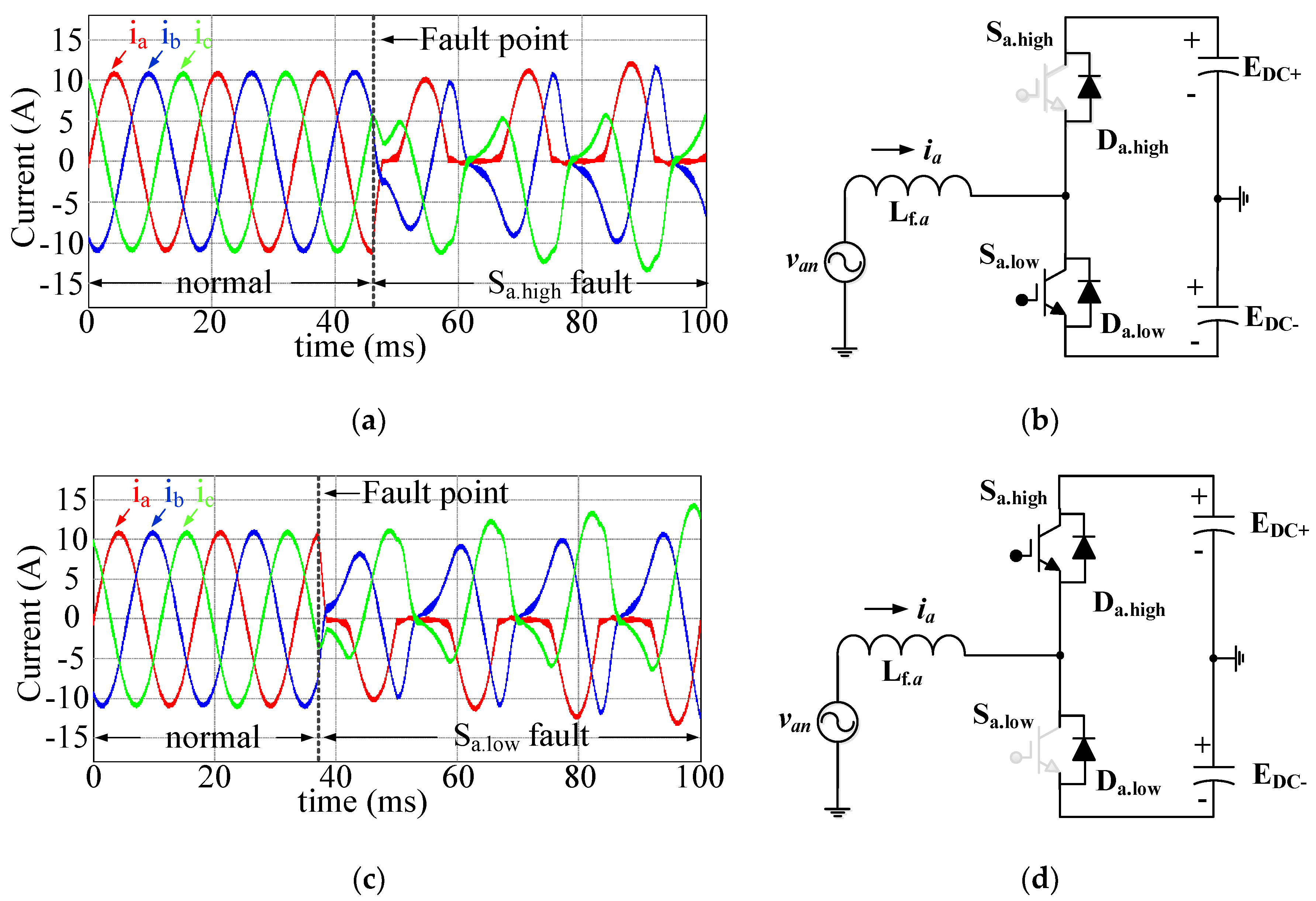
2. Switch Fault of the Grid-Tied AC–DC Converter for Hybrid Grid Systems
3. Operational Principle of Proposed Fault Diagnosis Algorithm
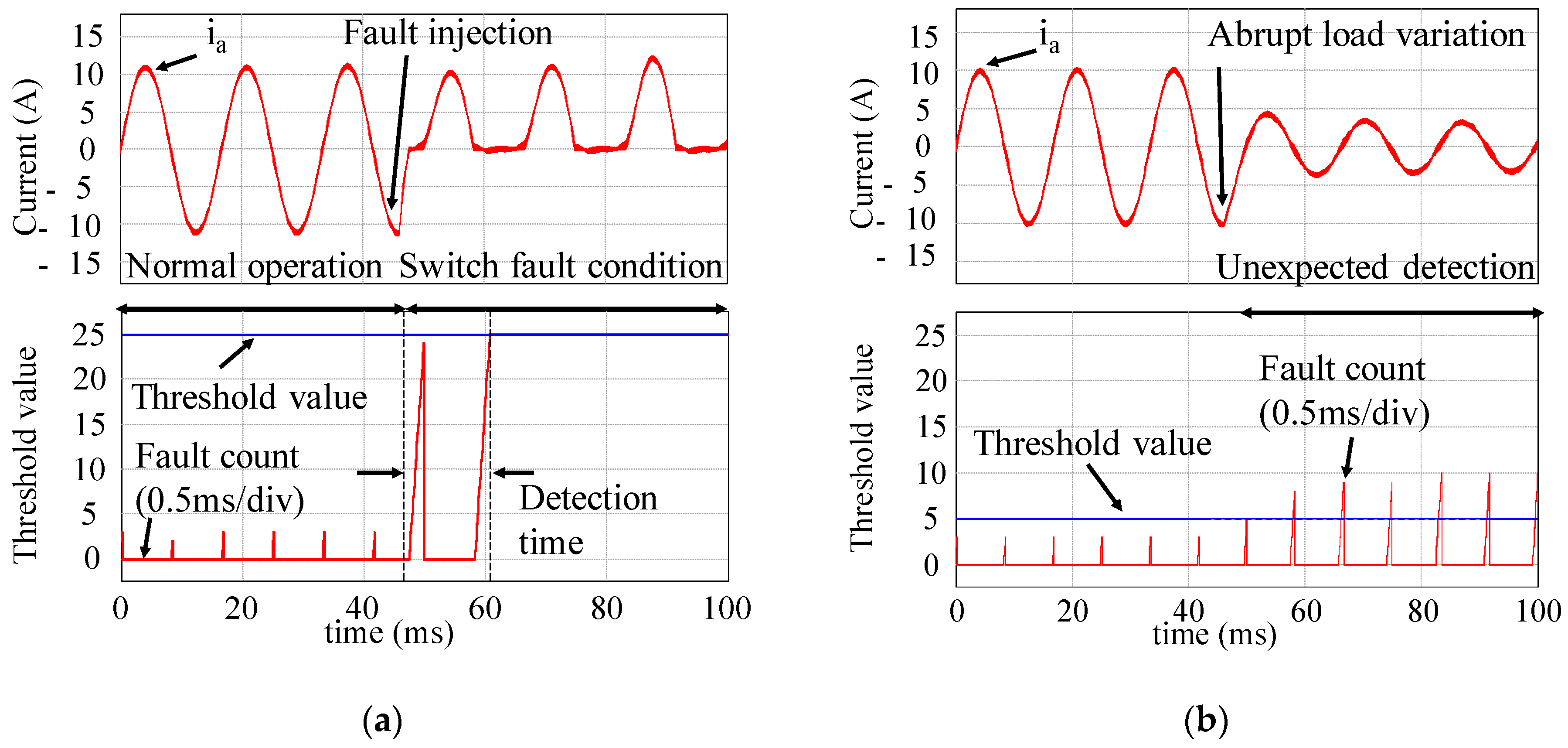
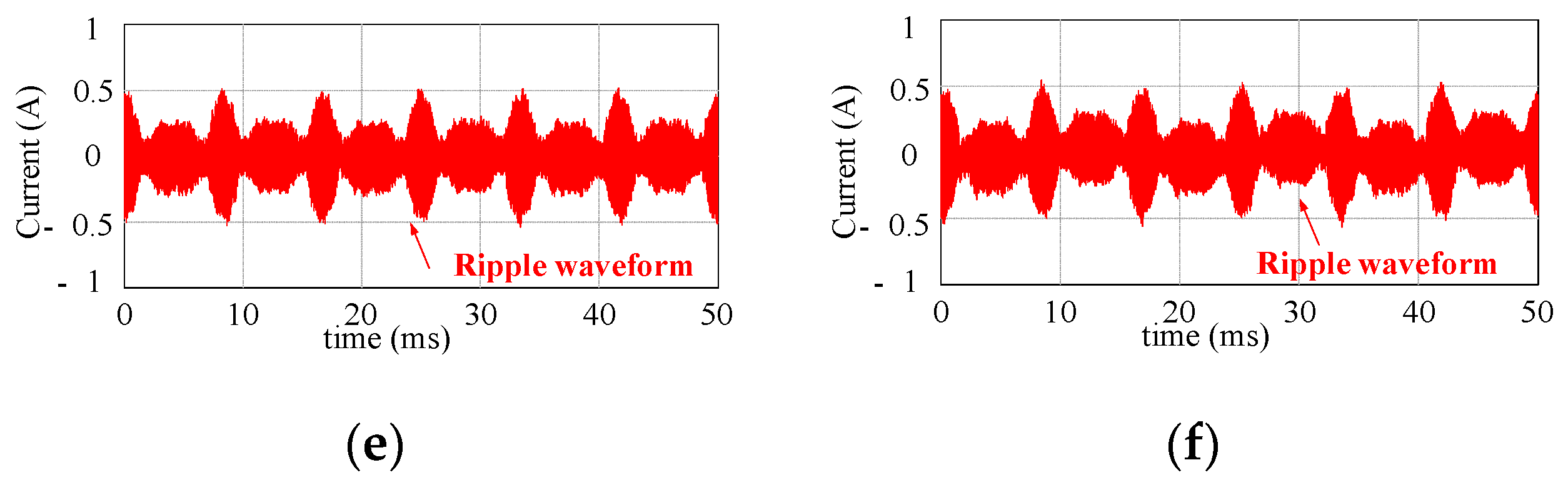
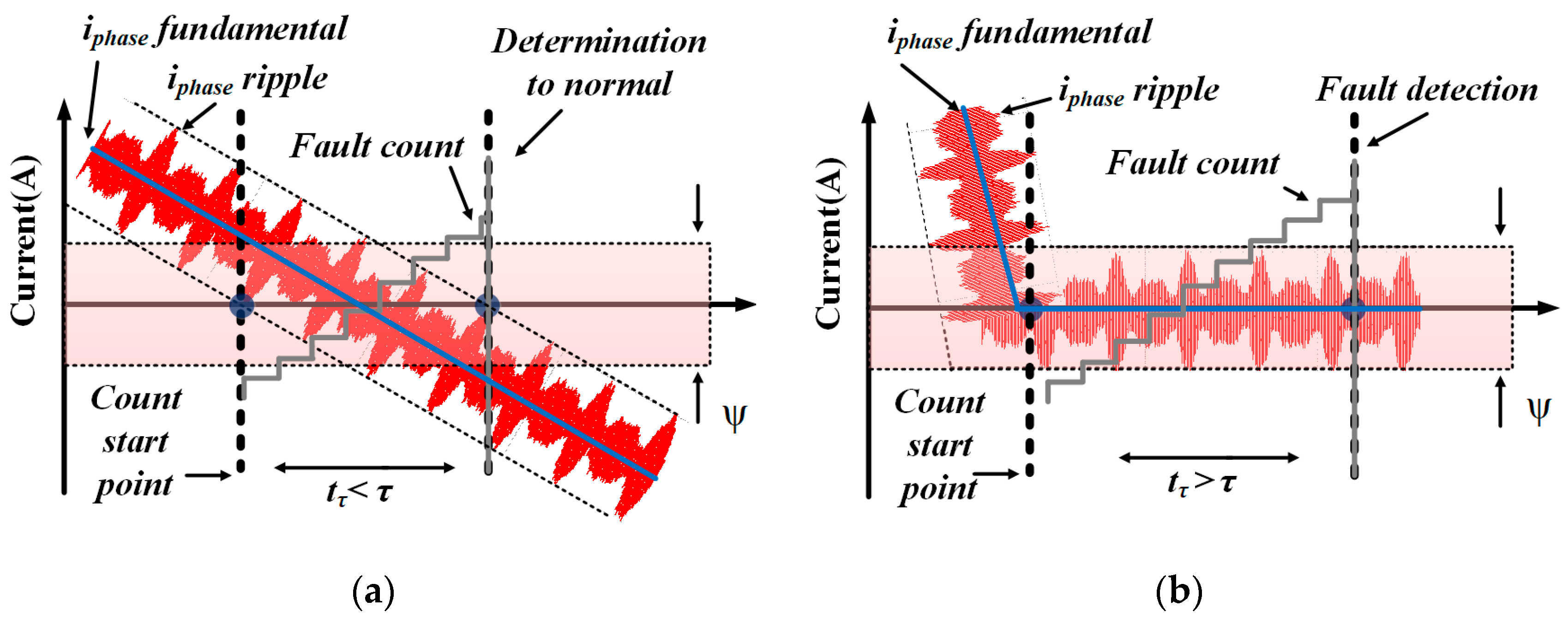
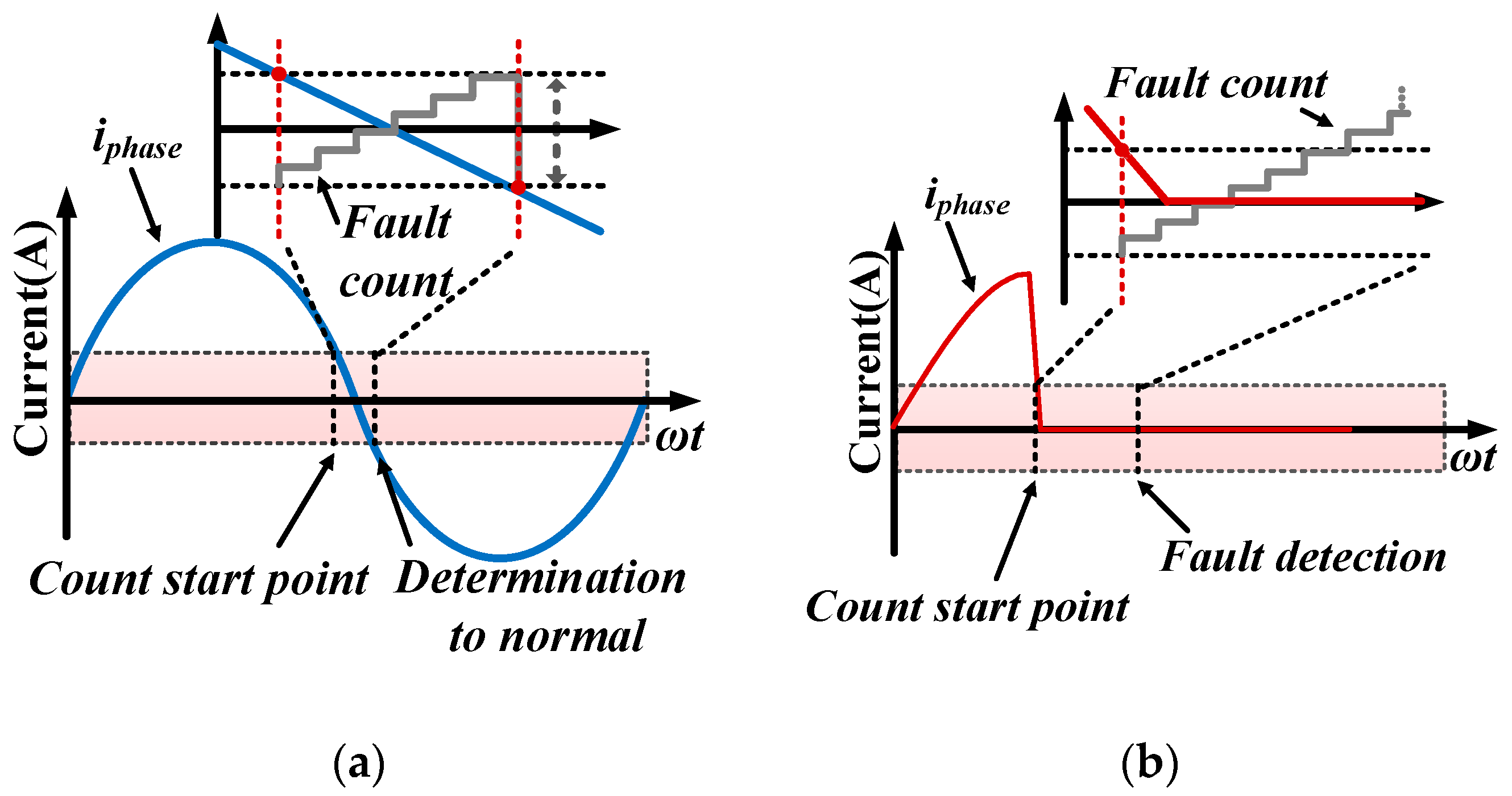
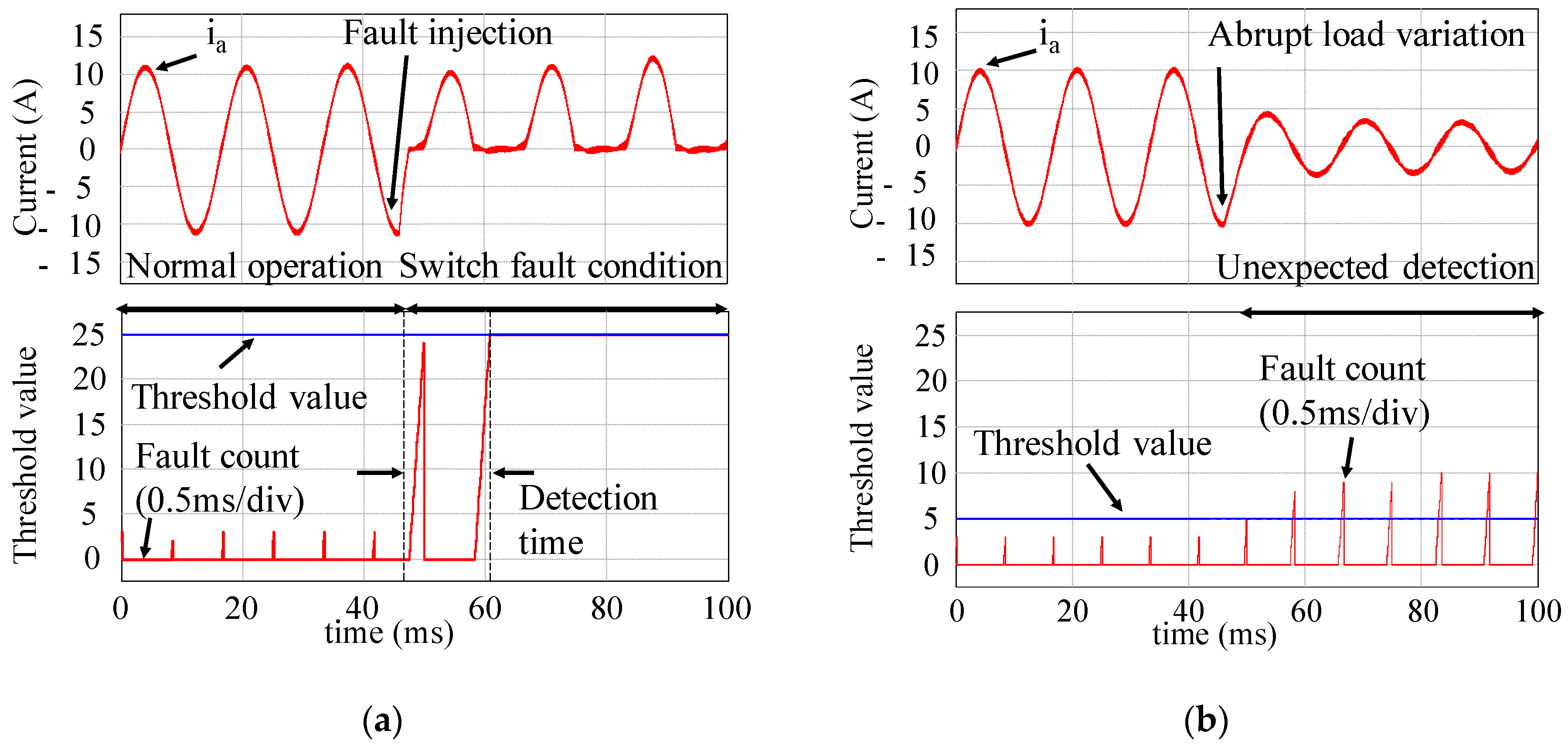
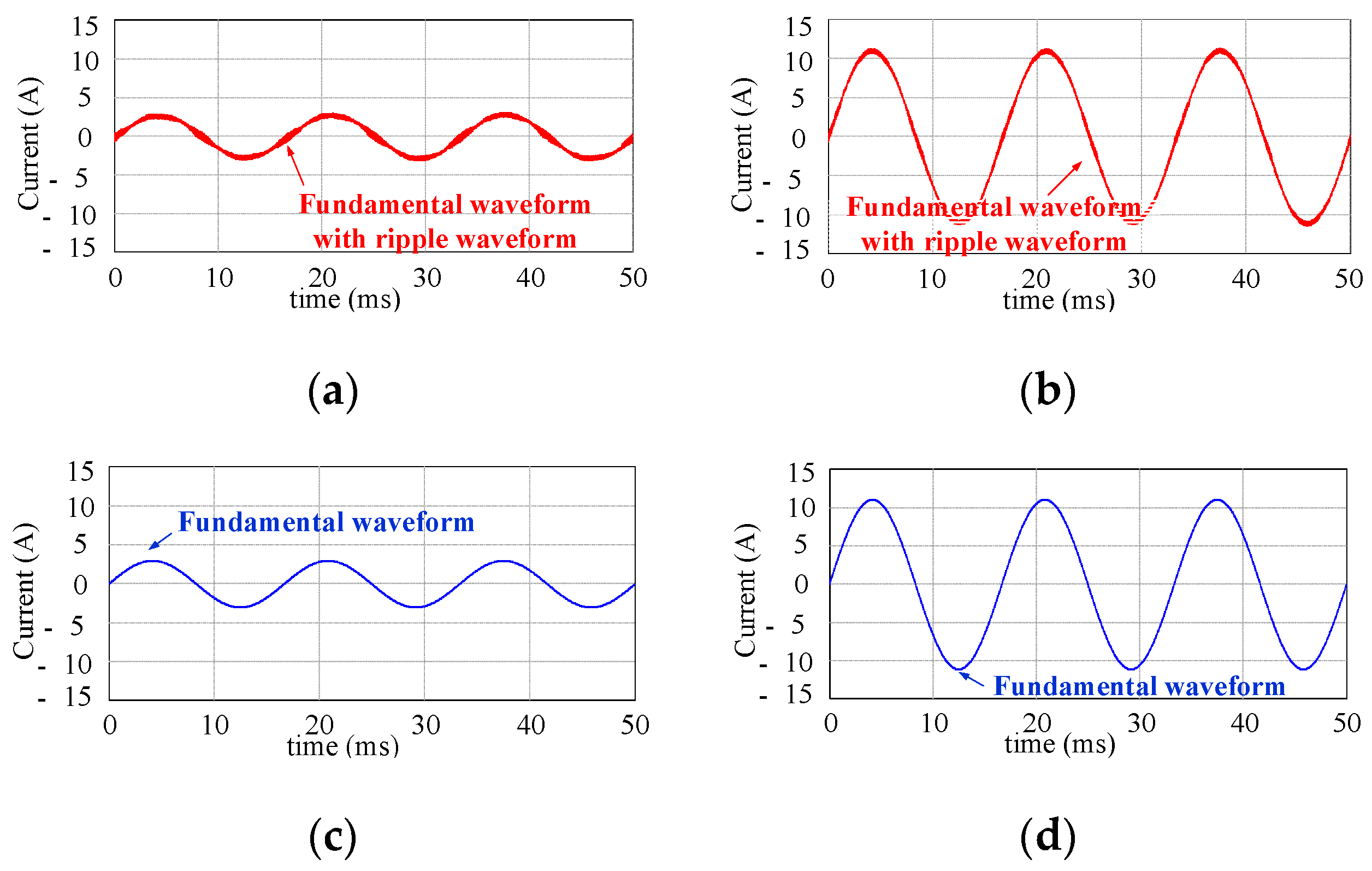
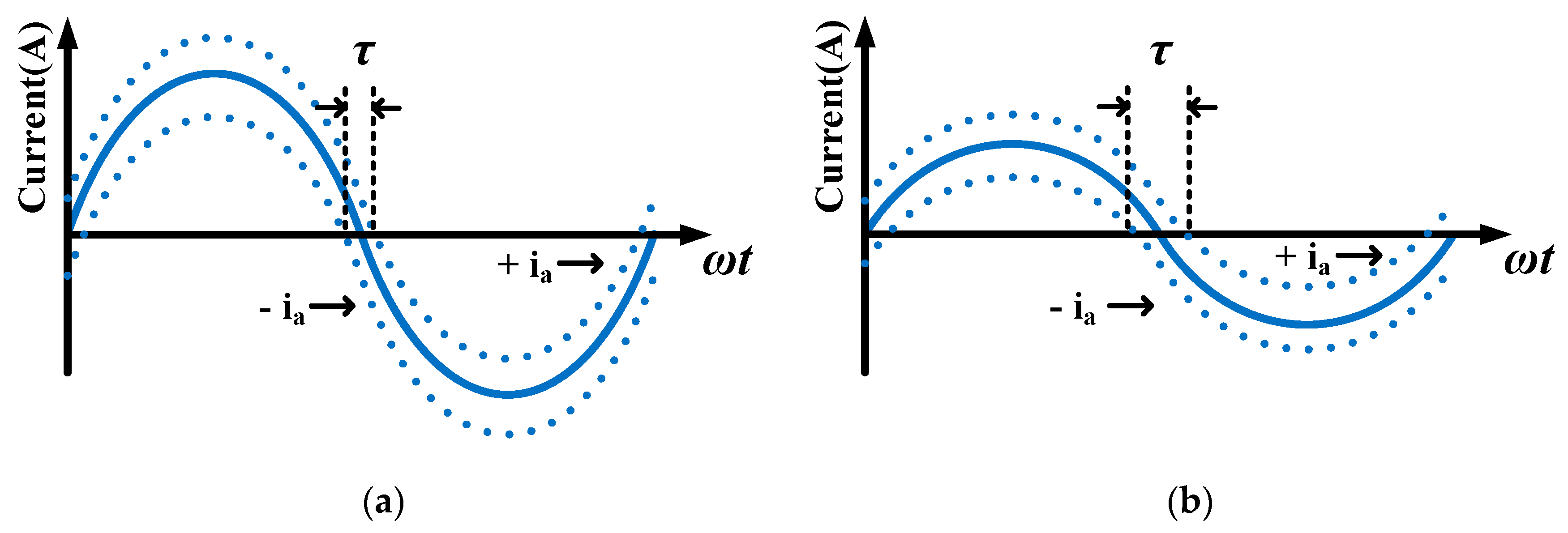
3.1. Limitation of Previous Counting Method
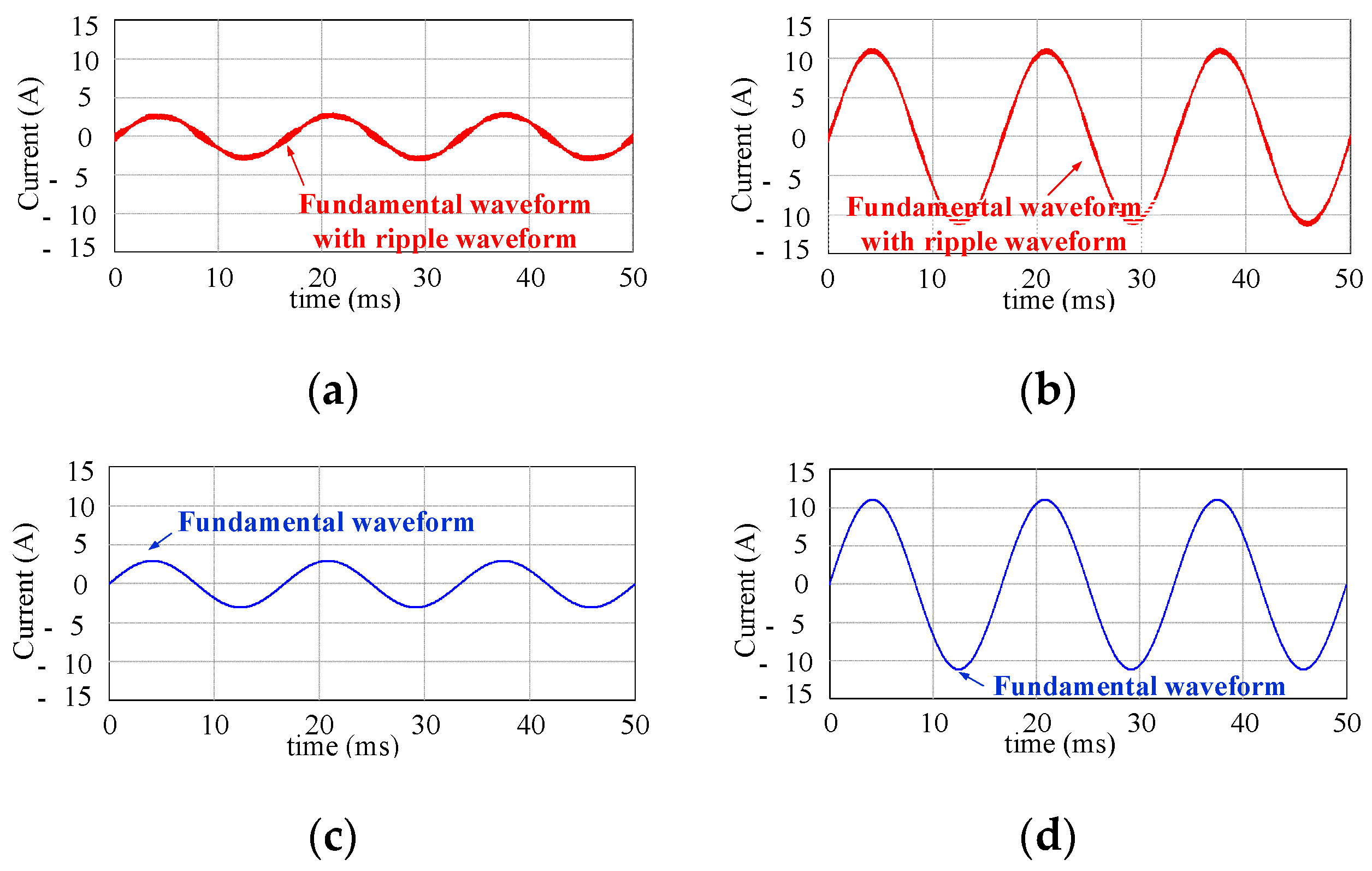
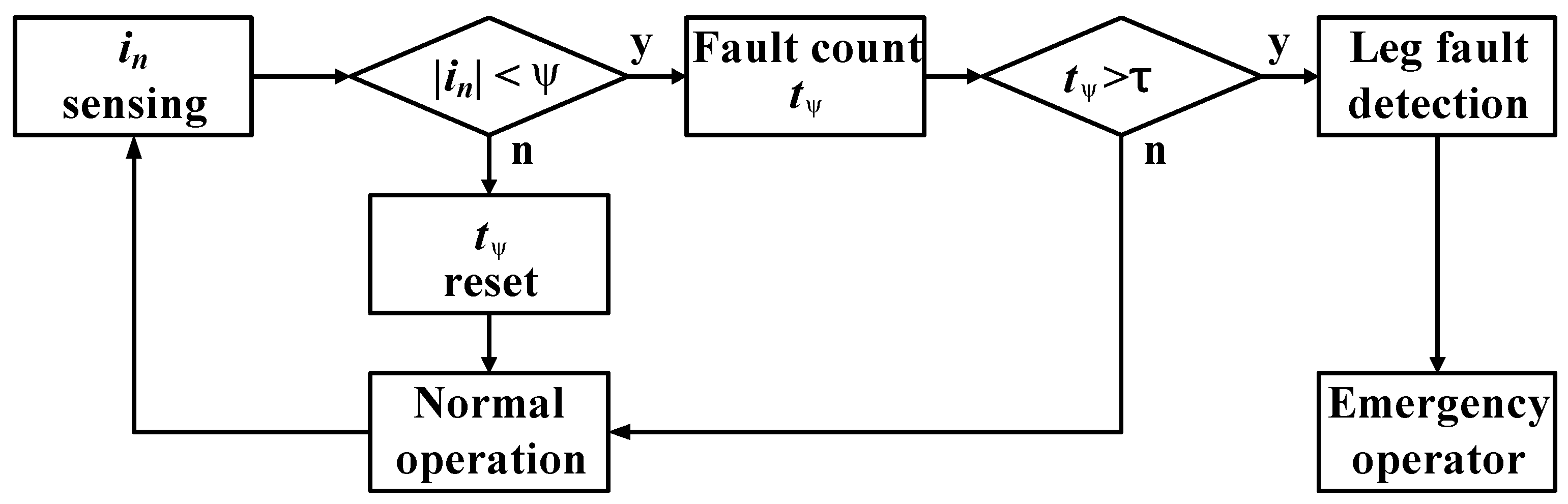
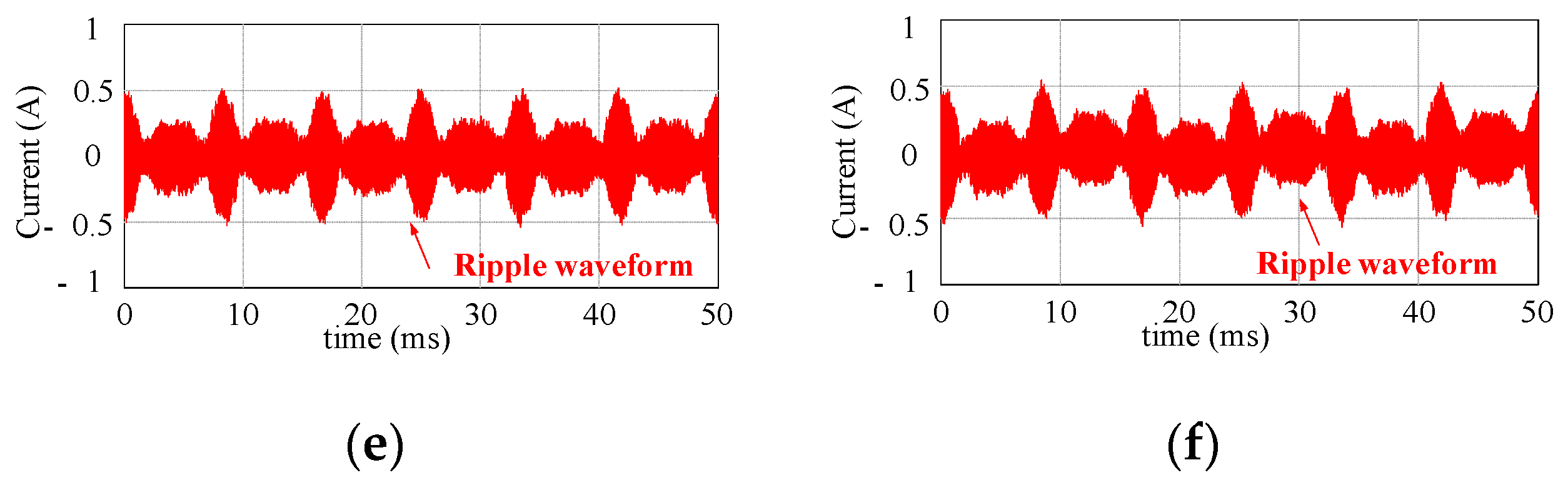
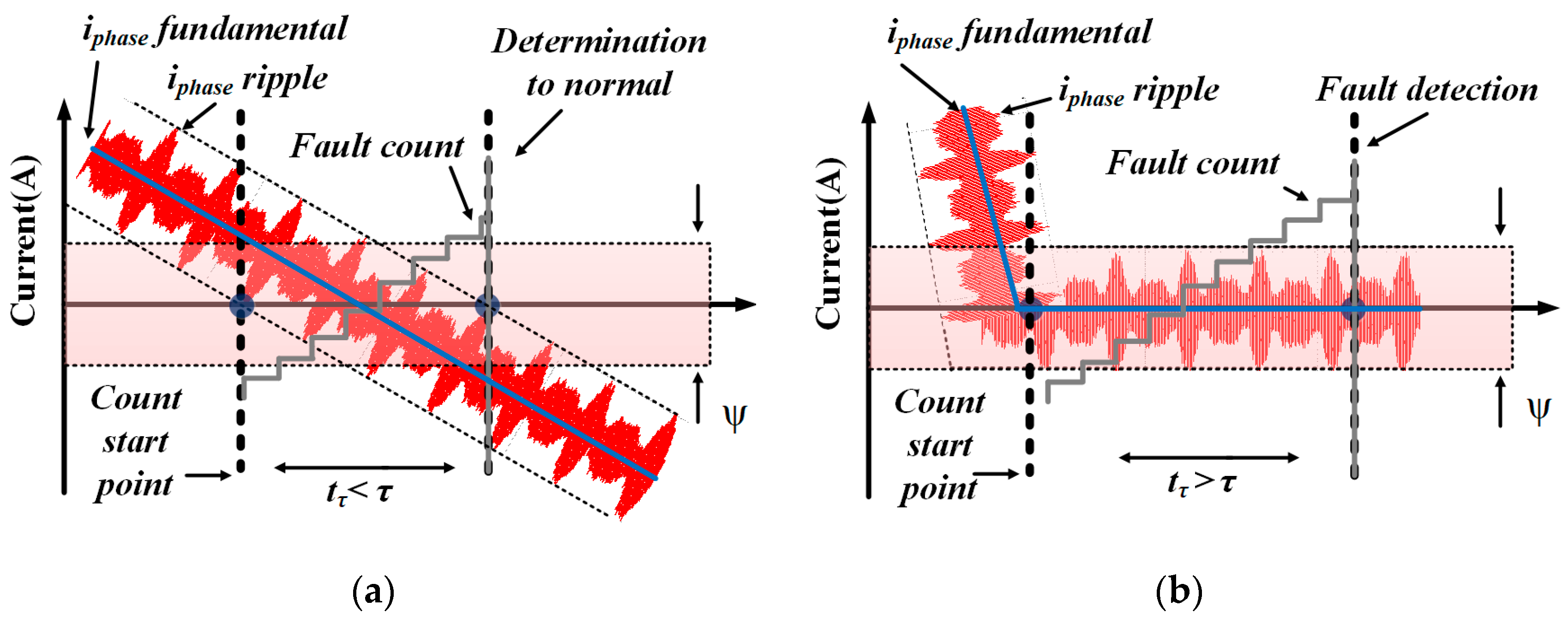
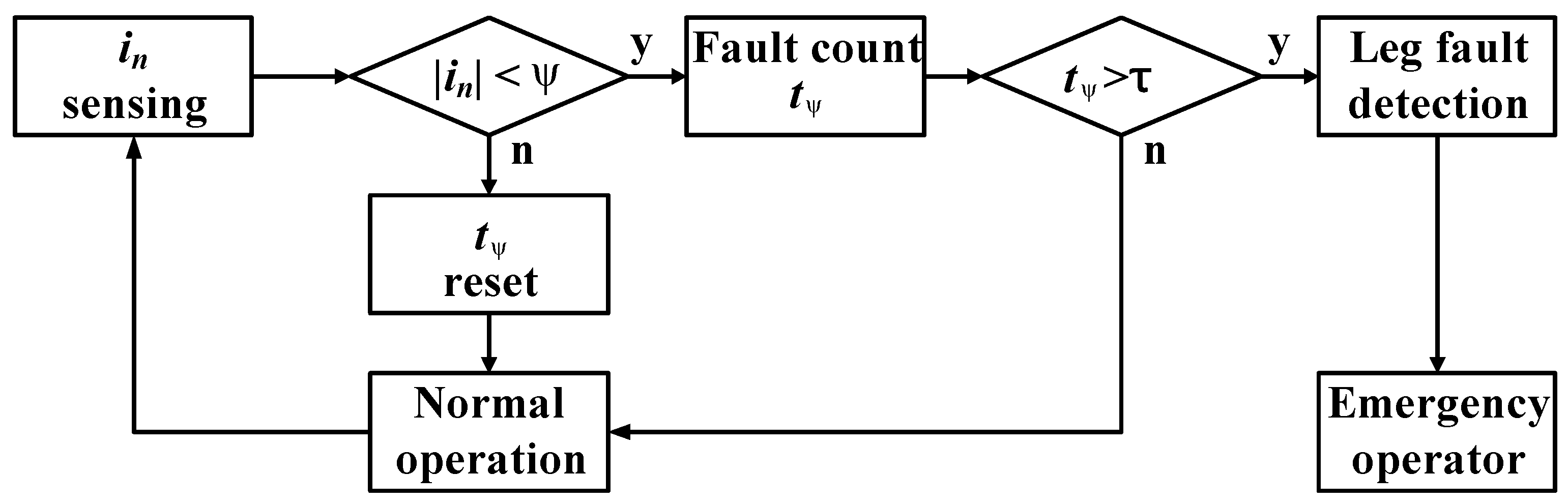
3.2. Proposed Switch Open Fault Diagnosis Algorithm
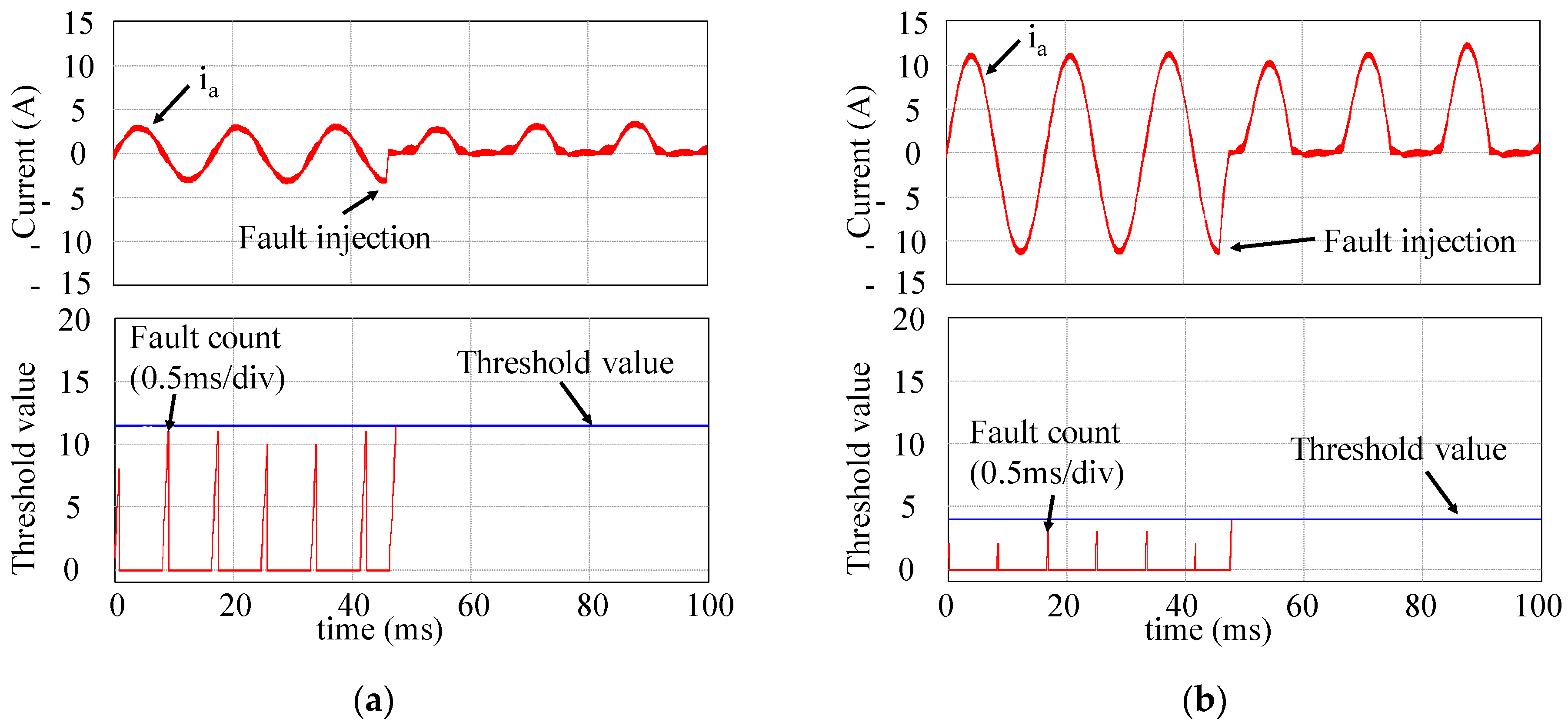
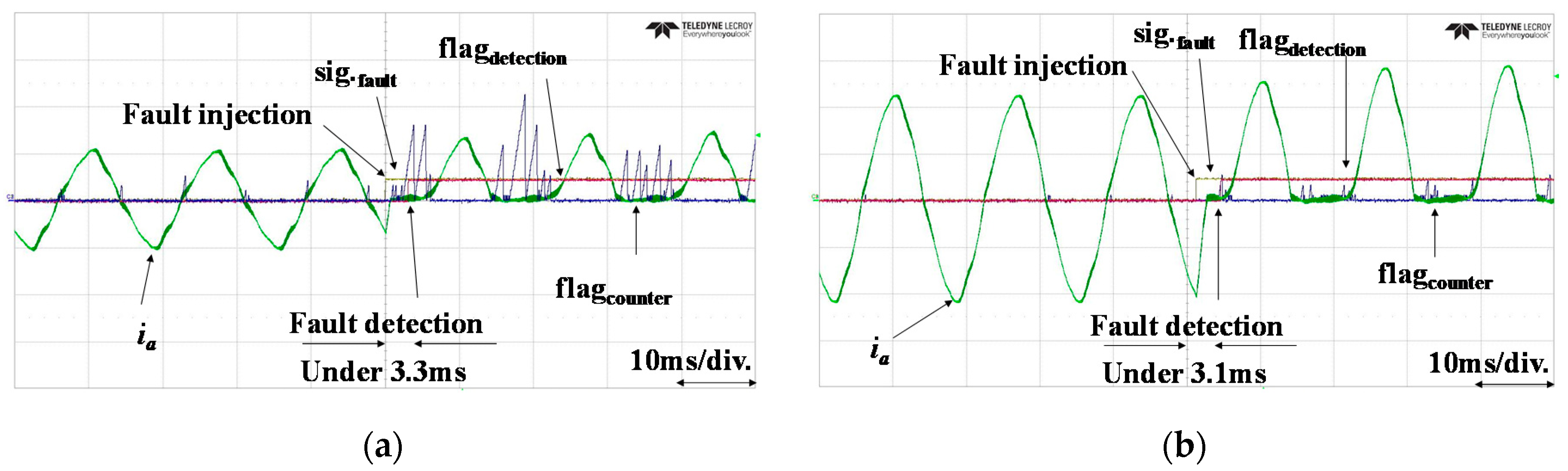
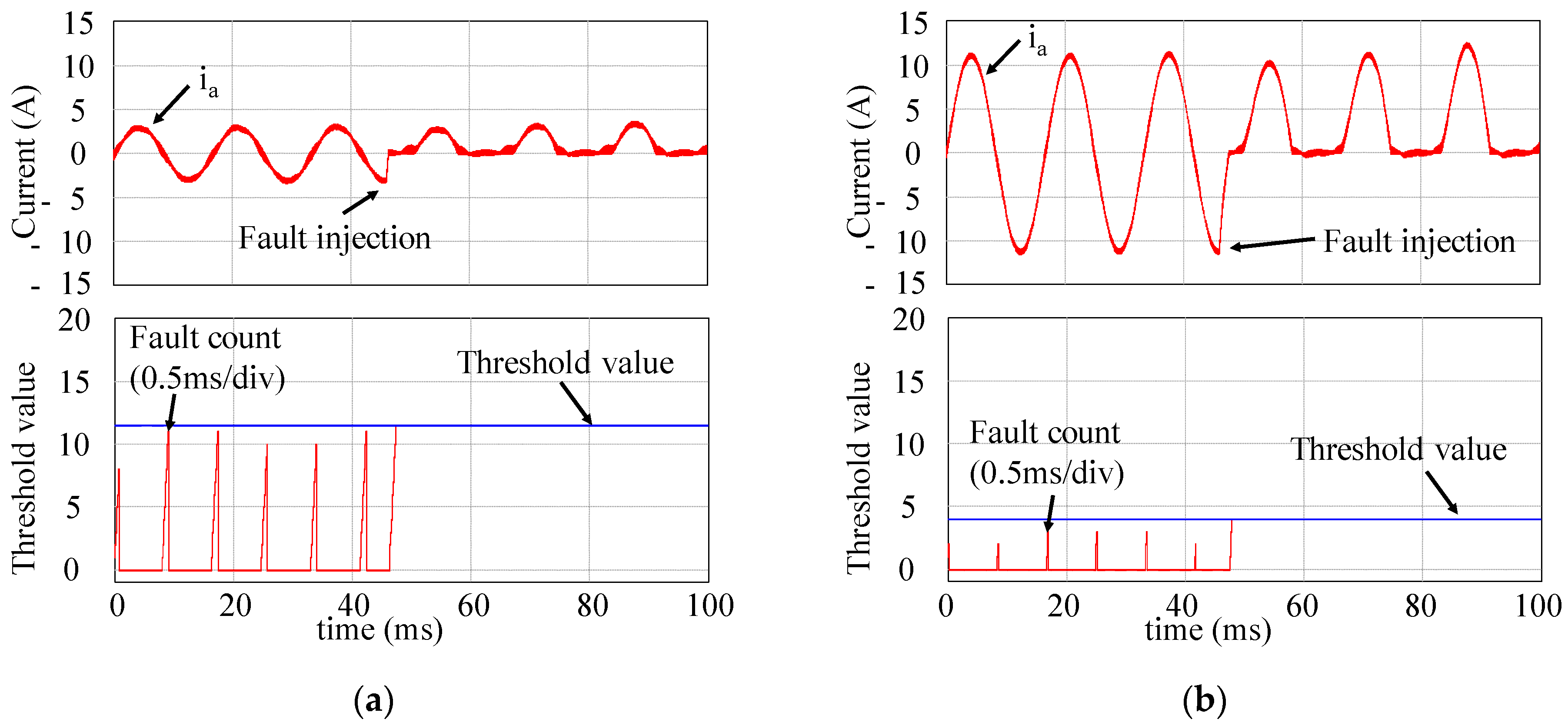
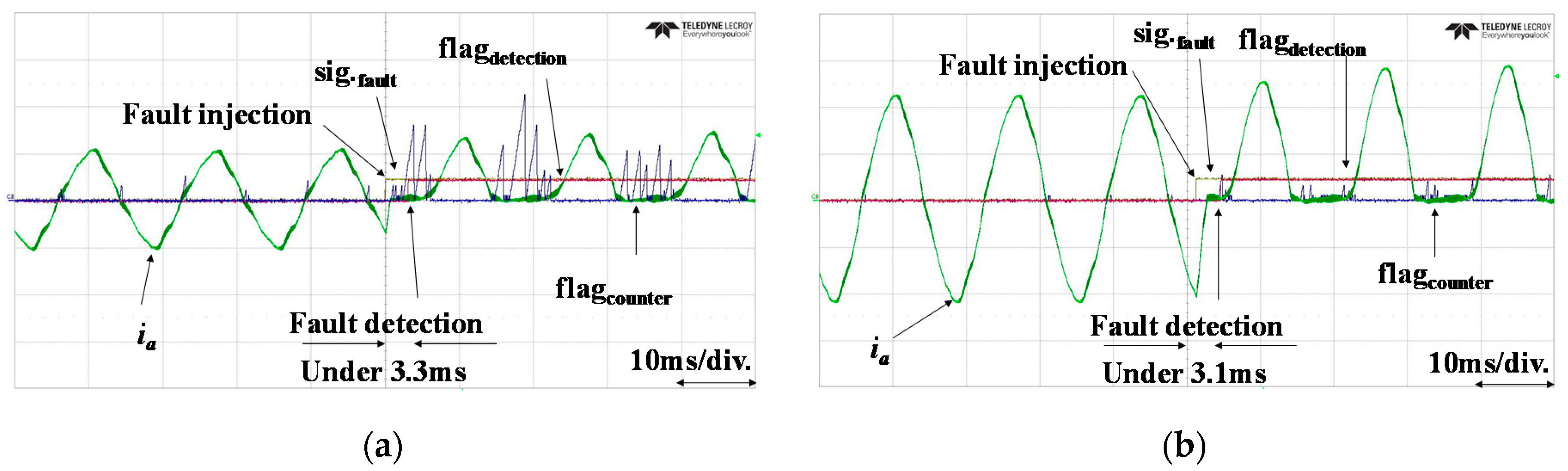
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, X.; Guo, L.; Li, Y.; Guo, Z.; Hong, C.; Zhang, Y.; Wang, C. A Unified Control for the DC-AC Interlinking Converters in Hybrid AC/DC Microgrids. IEEE Trans. Smart Grid 2018, 9, 6540–6553. [Google Scholar] [CrossRef]
- Choi, U.M.; Blaabjerg, F.; Lee, K.B. Study and Handling Methods of Power IGBT Module Failures in Power Electronic Converter Systems. IEEE Trans. Power Electron. 2015, 30, 2517–2533. [Google Scholar] [CrossRef]
- Brunson, C.; Empringham, L.; Lillo, L.D.; Wheeler, P.; Clare, J. Open-Circuit Fault Detection and Diagnosis in Matrix Converters. IEEE Trans. Power Electron. 2015, 30, 2840–2847. [Google Scholar] [CrossRef]
- Martínez, S.; Castro, M.; Antoranz, R.; Aldana, F. Off-Line Uninterruptible Power Supply with Zero Transfer Time Using Integrated Magnetics. IEEE Trans. Ind. Electron. 1989, 36, 441–445. [Google Scholar] [CrossRef]
- Sölter, D.I.W. An international UPS classification by IEC 62040-3. In Proceedings of the 24th Annual International Telecommunications Energy Conference, Montreal, QC, Canada, 29 September–3 October 2002; pp. 541–545. [Google Scholar]
- Shahbazi, M.; Poure, P.; Saadate, S.; Zolghadri, M.R. FPGA-Based Reconfigurable Control for Fault-Tolerant Back-to-Back Converter without Redundancy. IEEE Trans. Ind. Electron. 2013, 60, 3360–3371. [Google Scholar] [CrossRef]
- Lamb, J.; Mirafzal, B. Open-Circuit IGBT Fault Detection and Location Isolation for Cascaded Multilevel Converters. IEEE Trans. Ind. Electron. 2017, 64, 4846–4856. [Google Scholar] [CrossRef]
- Karimi, S.; Gaillard, A.; Poure, P.; Saadate, S. FPGA-Based Real-Time Power Converter Failure Diagnosis for Wind Energy Conversion Systems. IEEE Trans. Ind. Electron. 2008, 55, 4299–4308. [Google Scholar] [CrossRef]
- Zhang, H.; Sun, C.; Li, Z.; Liu, J.; Cao, H.; Zhang, X. Voltage Vector Error Fault Diagnosis for Open-Circuit Faults of Three-Phase Four-Wire Active Power Filters. IEEE Trans. Power Electron. 2017, 32, 2215–2226. [Google Scholar] [CrossRef]
- Dan, H.; Peng, T.; Su, M.; Deng, H.; Zhu, Q.; Zhao, Z.; Wheeler, P. Error-Voltage-Based Open-Switch Fault Diagnosis Strategy for Matrix Converters with Model Predictive Control Method. IEEE Trans. Ind. Appl. 2017, 53, 4603–4612. [Google Scholar] [CrossRef]
- Mendes, A.M.S.; Cardoso, A.J.M. Voltage source inverter fault diagnosis in variable speed AC drives, by the average current Park’s vector approach. In Proceedings of the IEEE International Electric Machines and Drives Conference, IEMDC’99, Seattle, WA, USA, 9–12 May 1999; pp. 704–706. [Google Scholar]
- Ribeiro, R.L.A.; Jacobina, C.B.; Silva, E.R.C.; Lima, A.M.N. Fault Detection of Open-Switch Damage in Voltage-Fed PWM Motor Drive Systems. IEEE Trans. Power Electron. 2003, 18, 587–593. [Google Scholar] [CrossRef]
- Duan, P.; Xie, K.; Rong, X. Open-Switch Fault Diagnosis and System Reconfiguration of Doubly fed Wind Power Converter Used in a Microgrid. IEEE Trans. Power Electron. 2011, 26, 816–821. [Google Scholar] [CrossRef]
- Choi, U.M.; Jeong, H.G.; Lee, K.B.; Blaabjerg, F. Method for Detecting an Open-Switch Fault in a Grid-Connected NPC Inverter System. IEEE Trans. Power Electron. 2012, 27, 2726–2739. [Google Scholar] [CrossRef]
- Khomfoi, S.; Eae-Kok, W.; Ngamoroo, I. An Open Circuit Fault Diagnostic Technique in IGBTs for AC to DC Converters Applied in Microgrid Applications. J. Power Electron. 2011, 11, 801–810. [Google Scholar] [CrossRef]
- Lu, B.; Sharma, S.K. A Literature Review of IGBT Fault Diagnostic and Protection Methods for Power Inverters. IEEE Trans. Ind. Appl. 2009, 45, 1770–1777. [Google Scholar]
- Peuget, R.; Courtine, S.; Rognon, J.P. Fault detection and isolation on a PWM inverter by knowledge-based model. IEEE Trans. Ind. Appl. 1998, 34, 1318–1326. [Google Scholar] [CrossRef]
- Lee, J.S.; Lee, K.B.; Blaabjerg, F. Open-Switch Fault Detection Method of a Back-to-Back Converter Using NPC Topology for Wind Turbine Systems. IEEE Trans. Ind. Appl. 2015, 51, 325–335. [Google Scholar] [CrossRef]
- Choi, U.M.; Lee, K.B.; Blaabjerg, F. Diagnosis and Tolerant Strategy of an Open-Switch Fault for T-Type Three-Level Inverter Systems. IEEE Trans. Ind. Appl. 2014, 50, 495–508. [Google Scholar] [CrossRef]
- Rothenhagen, K.; Fuchs, F.W. Performance of Diagnosis Methods for IGBT Open Circuit Faults in Voltage Source Active Rectifiers. In Proceedings of the IEEE 35th Annual Power Electronics Specialist Conference, Aachen, Germany, 20–25 June 2004; pp. 4348–4354. [Google Scholar]
- Lee, J.S.; Choi, U.M.; Lee, K.B. Comparison of Tolerance Controls for Open-Switch Fault in a Grid-Connected T-Type Rectifier. IEEE Trans. Power Electron. 2015, 30, 5810–5820. [Google Scholar] [CrossRef]
- Choi, U.M.; Lee, J.S.; Lee, K.B. New Modulation Strategy to Balance the Neutral-Point Voltage for Three-Level Neutral-Clamped Inverter Systems. IEEE Trans. Energy Convers. 2014, 29, 91–100. [Google Scholar] [CrossRef]
- Choi, U.M.; Lee, J.S.; Blaabjerg, F.; Lee, K.B. Open-Circuit Fault Diagnosis and Fault-Tolerant Control for a Grid-Connected NPC Inverter. IEEE Trans. Power Electron. 2016, 31, 7234–7247. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, D.; Enjeti, P.N.; Li, H.; Hawke, J.T.; Krishnamoorthy, H.S. Survey on Fault-Tolerant Techniques for Power Electronic Converters. IEEE Trans. Power Electron. 2014, 29, 6319–6331. [Google Scholar] [CrossRef]
- Rashid, G.; Ali, M.H. Transient Stability Enhancement of Doubly Fed Induction Machine-Based Wind Generator by Bridge-Type Fault Current Limiter. IEEE Trans. Energy Convers. 2015, 30, 939–947. [Google Scholar] [CrossRef]
- Kong, X.; Zhang, Z.; Yin, X.; Wen, M. Study of Fault Current Characteristics of the DFIG Considering Dynamic Response of the RSC. IEEE Trans. Energy Convers. 2014, 29, 278–287. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | [Unit] | Parameter | Value | [Unit] |
|---|---|---|---|---|---|
| Input voltage, Vin | 220 | [Vrms] | Filter inductance, Lf | 3.2 | [mH] |
| Output voltage, Vout | 380 | [Vdc] | Filter capacitance, Cf | 4 | [uF] |
| Grid frequency, fgrid | 60 | [Hz] | DC link capacitor, Cdclink | 2 | [mF] |
| Power rate, Prated | 3 | [kW] | Threshold time, τ | 0.3–1 * margin | - |
| Switching frequency, fsw | 15 | [kHz] | Magnitude of current ripple, ψ | 1.1 | [A] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koo, G.W.; Joo, D.; Lee, B.K. Enhanced Threshold Point Calculation Algorithm for Switch Fault Diagnosis in Grid Connected 3-Phase AC–DC PWM Converters. Energies 2019, 12, 1979. https://doi.org/10.3390/en12101979
Koo GW, Joo D, Lee BK. Enhanced Threshold Point Calculation Algorithm for Switch Fault Diagnosis in Grid Connected 3-Phase AC–DC PWM Converters. Energies. 2019; 12(10):1979. https://doi.org/10.3390/en12101979
Chicago/Turabian StyleKoo, Geun Wan, DongMyoung Joo, and Byoung Kuk Lee. 2019. "Enhanced Threshold Point Calculation Algorithm for Switch Fault Diagnosis in Grid Connected 3-Phase AC–DC PWM Converters" Energies 12, no. 10: 1979. https://doi.org/10.3390/en12101979
APA StyleKoo, G. W., Joo, D., & Lee, B. K. (2019). Enhanced Threshold Point Calculation Algorithm for Switch Fault Diagnosis in Grid Connected 3-Phase AC–DC PWM Converters. Energies, 12(10), 1979. https://doi.org/10.3390/en12101979