A Novel Pilot Protection Principle Based on Modulus Traveling-Wave Currents for Voltage-Sourced Converter Based High Voltage Direct Current (VSC-HVDC) Transmission Lines

Abstract
:1. Introduction
2. Basic Principles
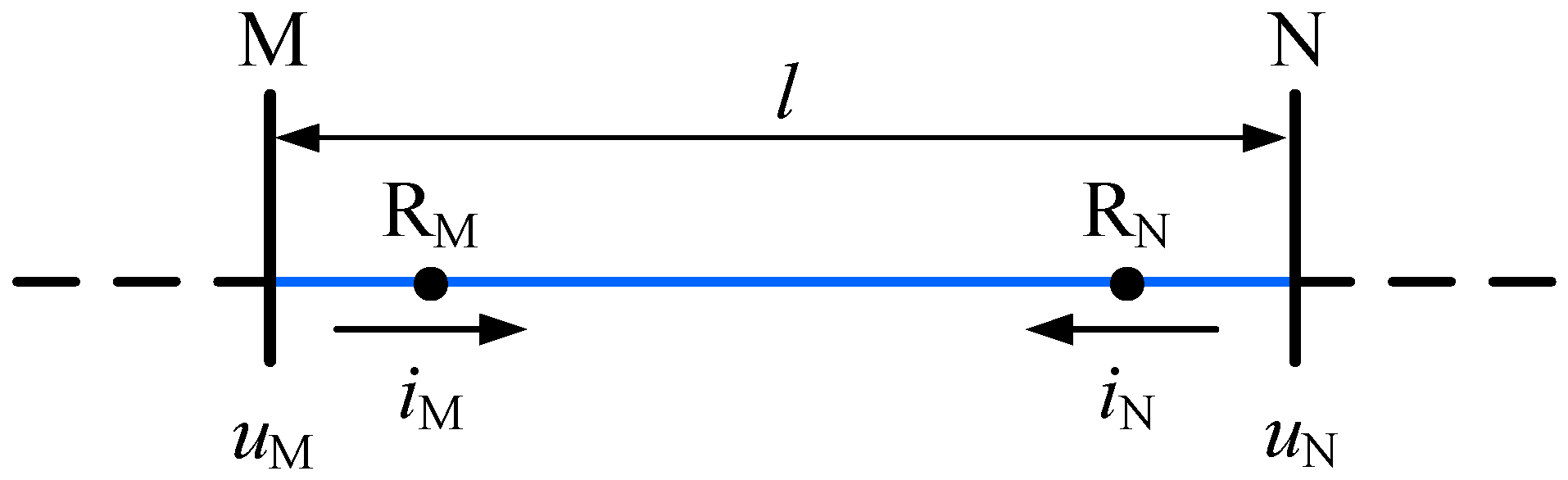
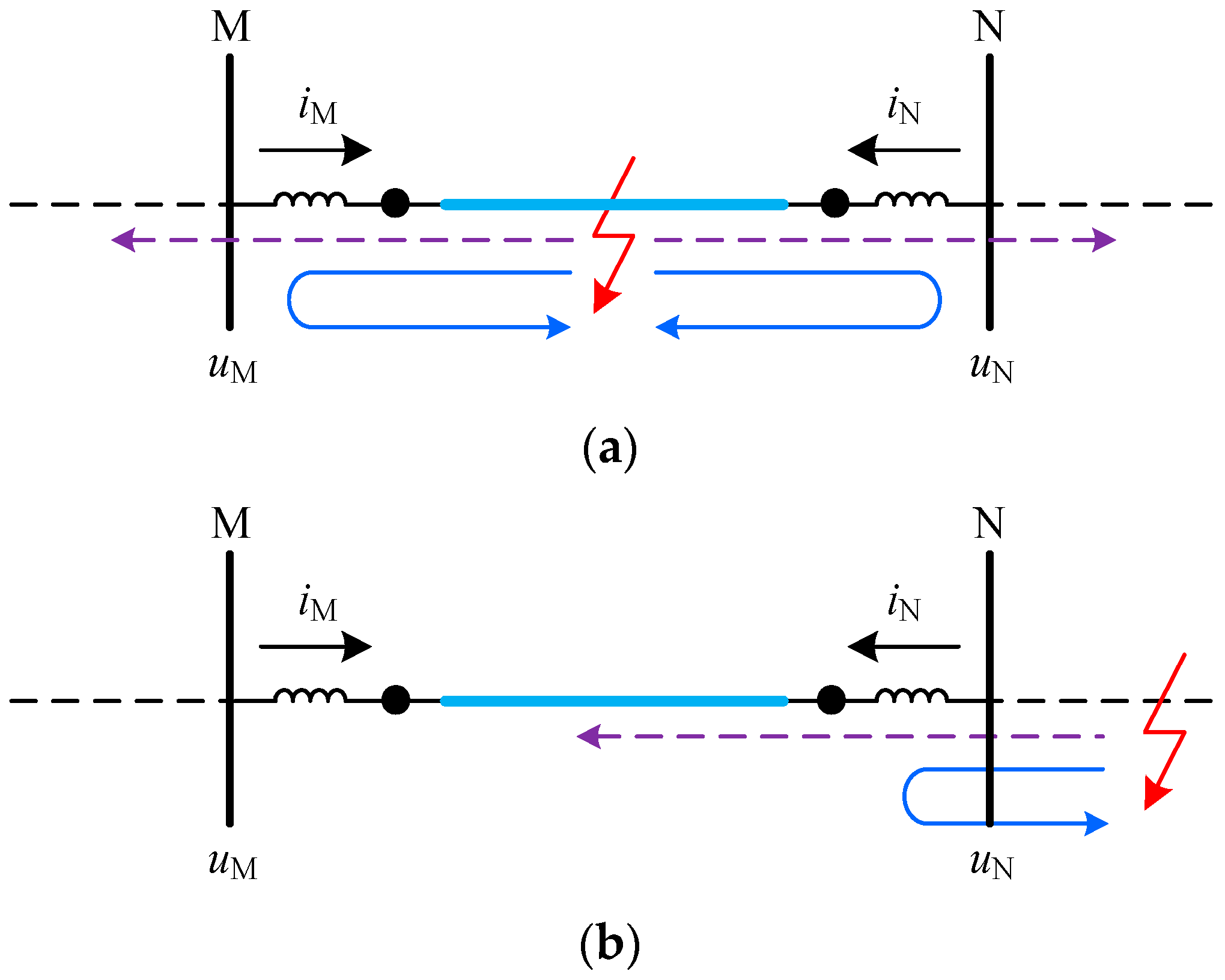
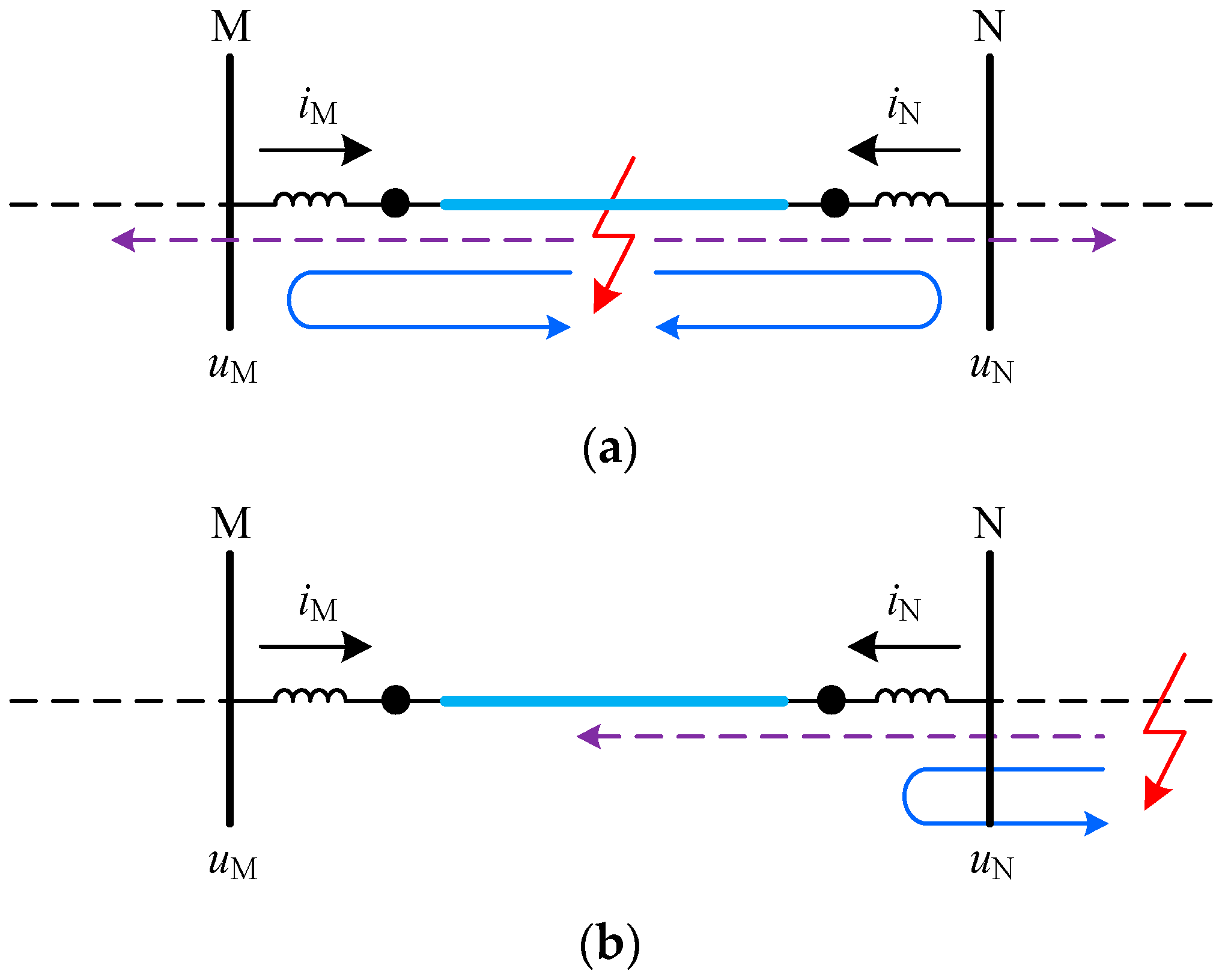
2.1. Directional Current Traveling Waves
2.2. Modulus Extraction
2.3. Wavelet Analysis Theory
3. Modulus Traveling-Wave Propagation Characteristics
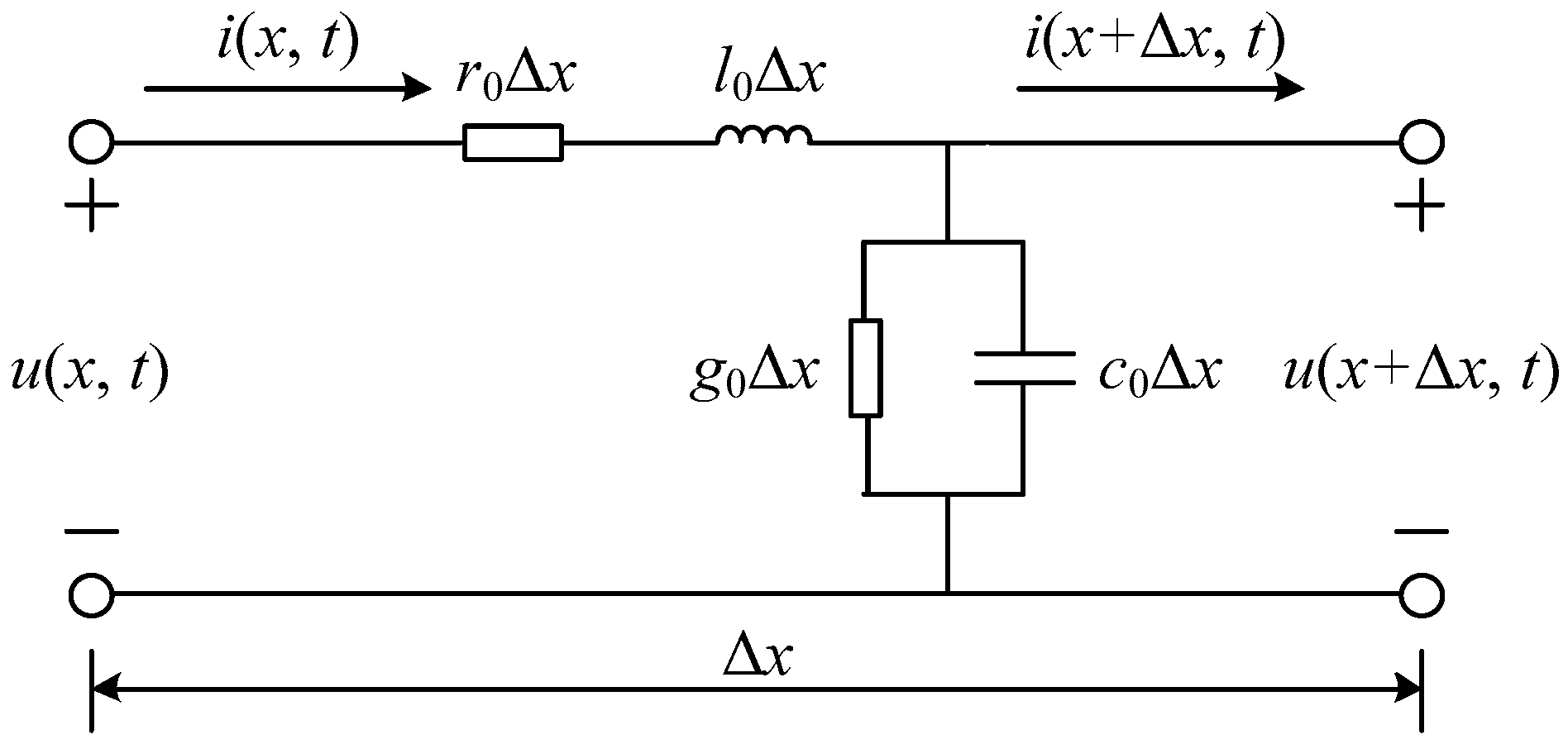
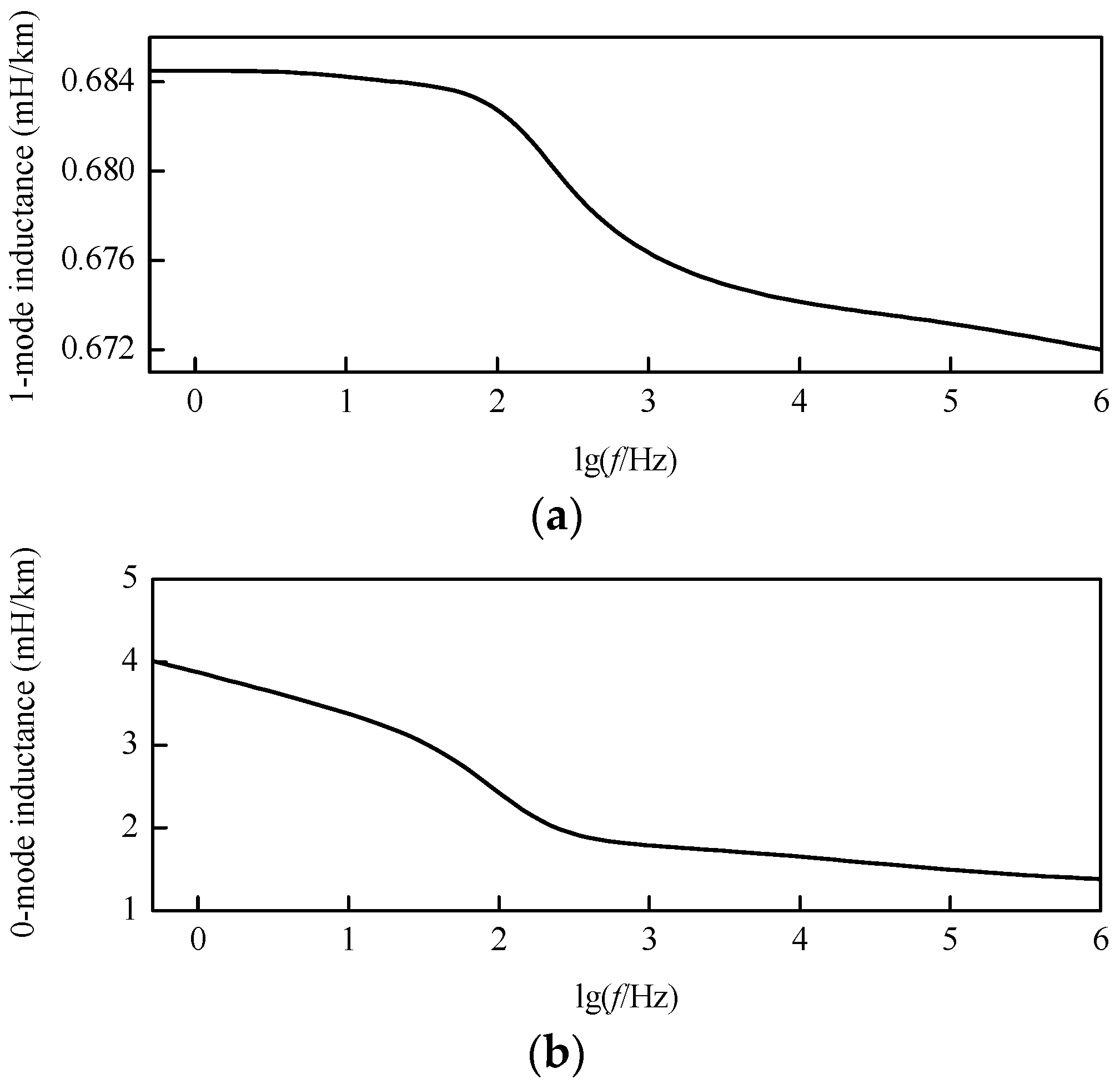
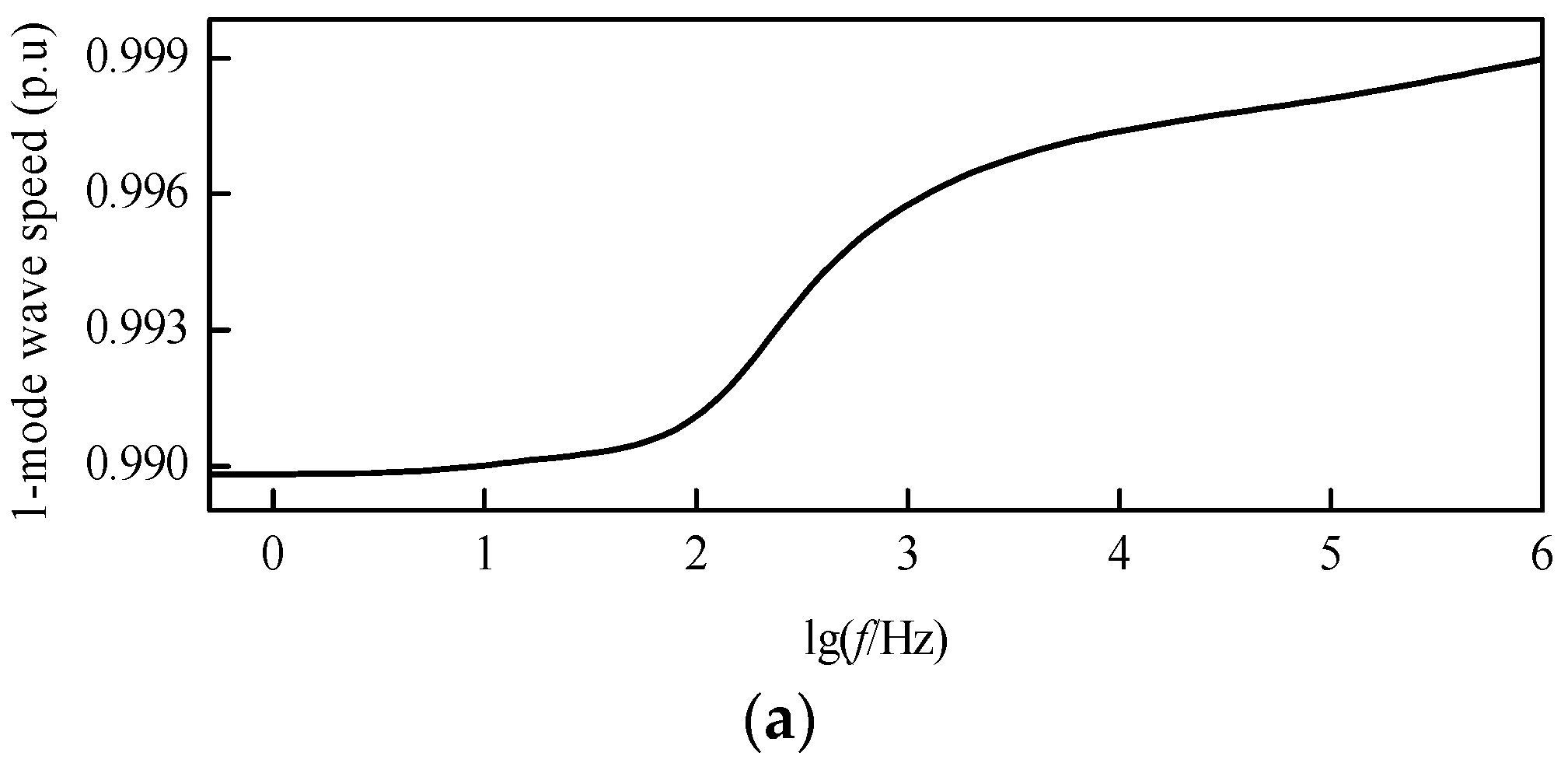
3.1. Frequency-Dependent Characteristics of DC Transmission Line Parameters
3.2. Wave Impedance
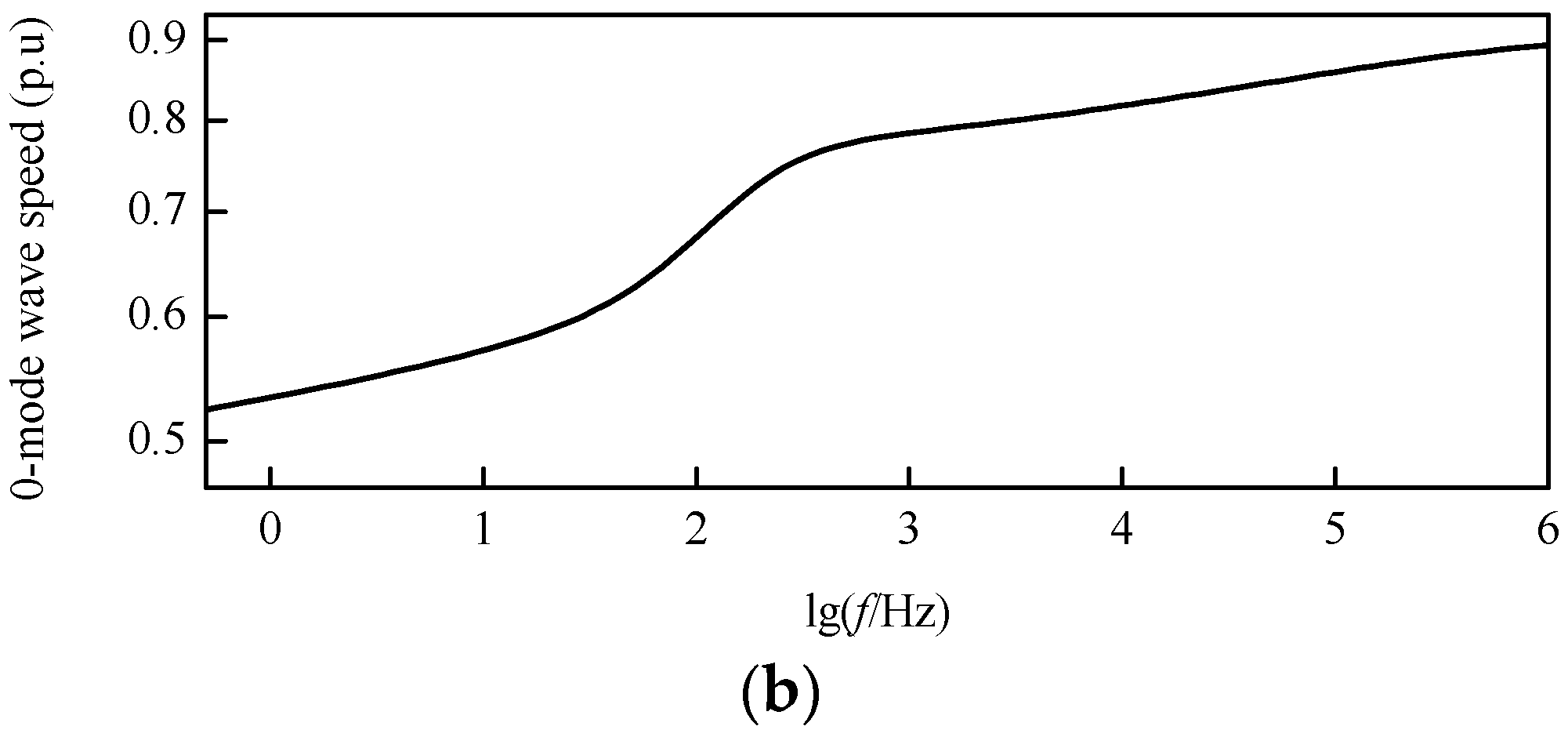
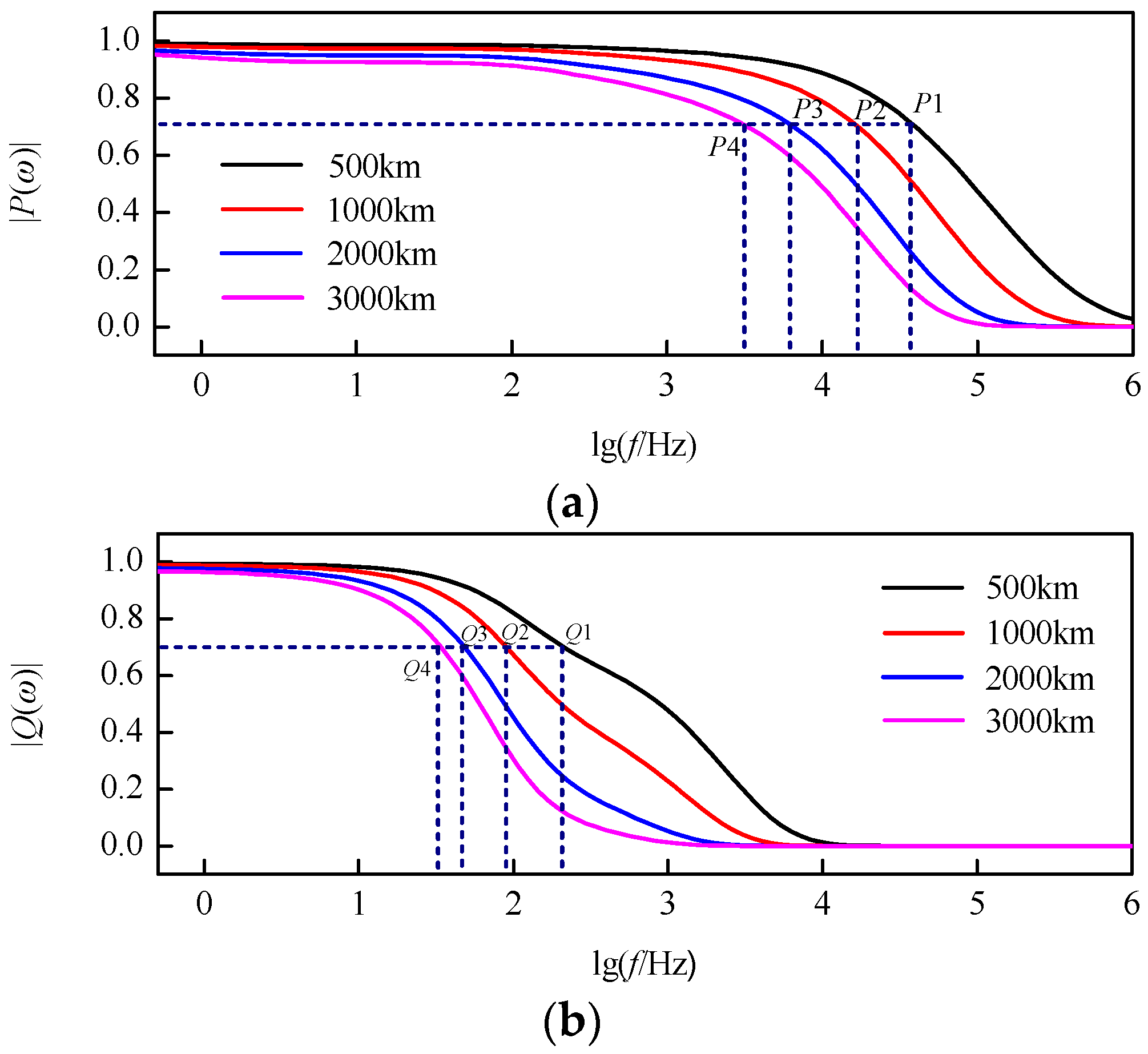
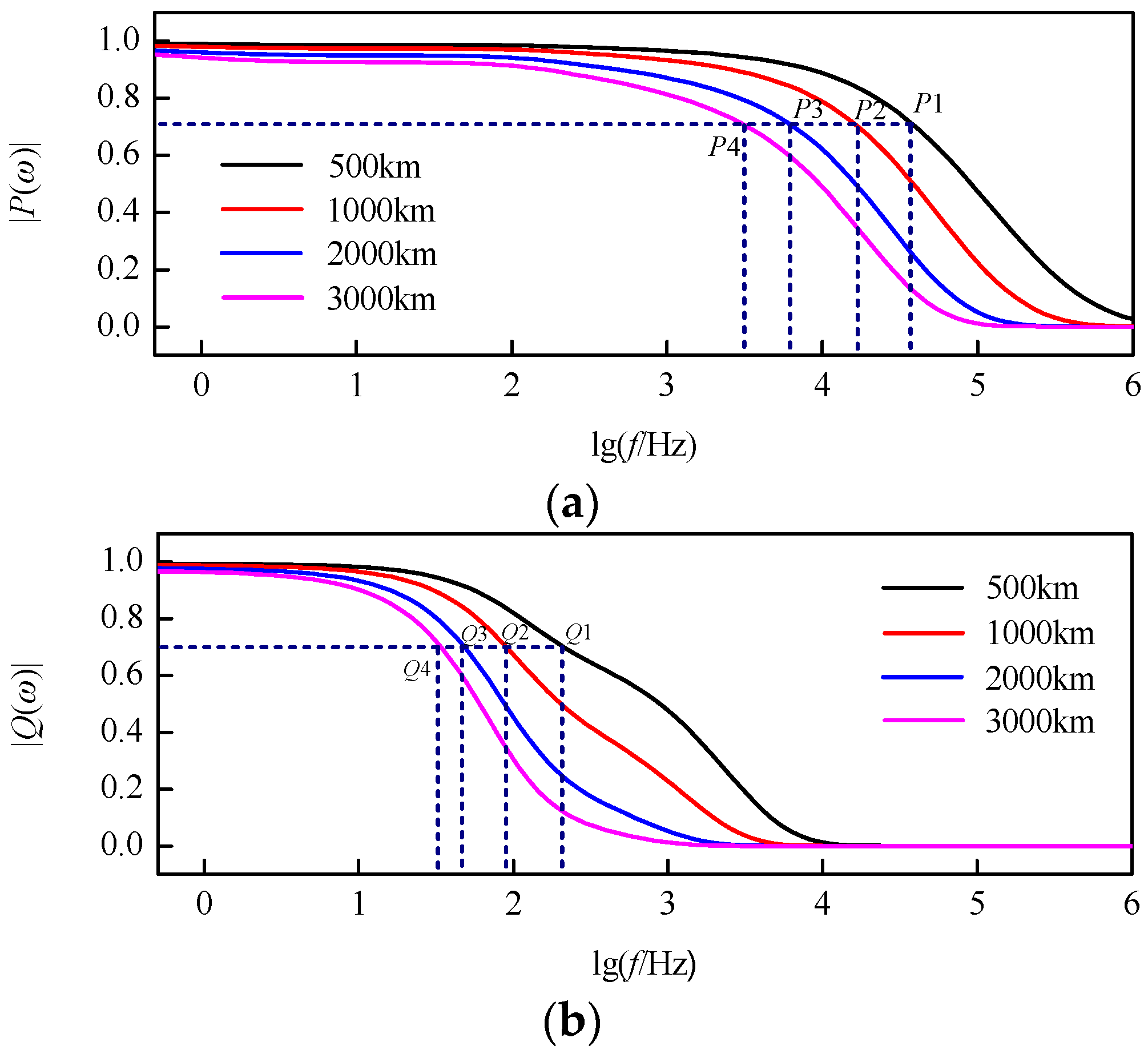
3.3. Propagation Functions
4. Protection Scheme
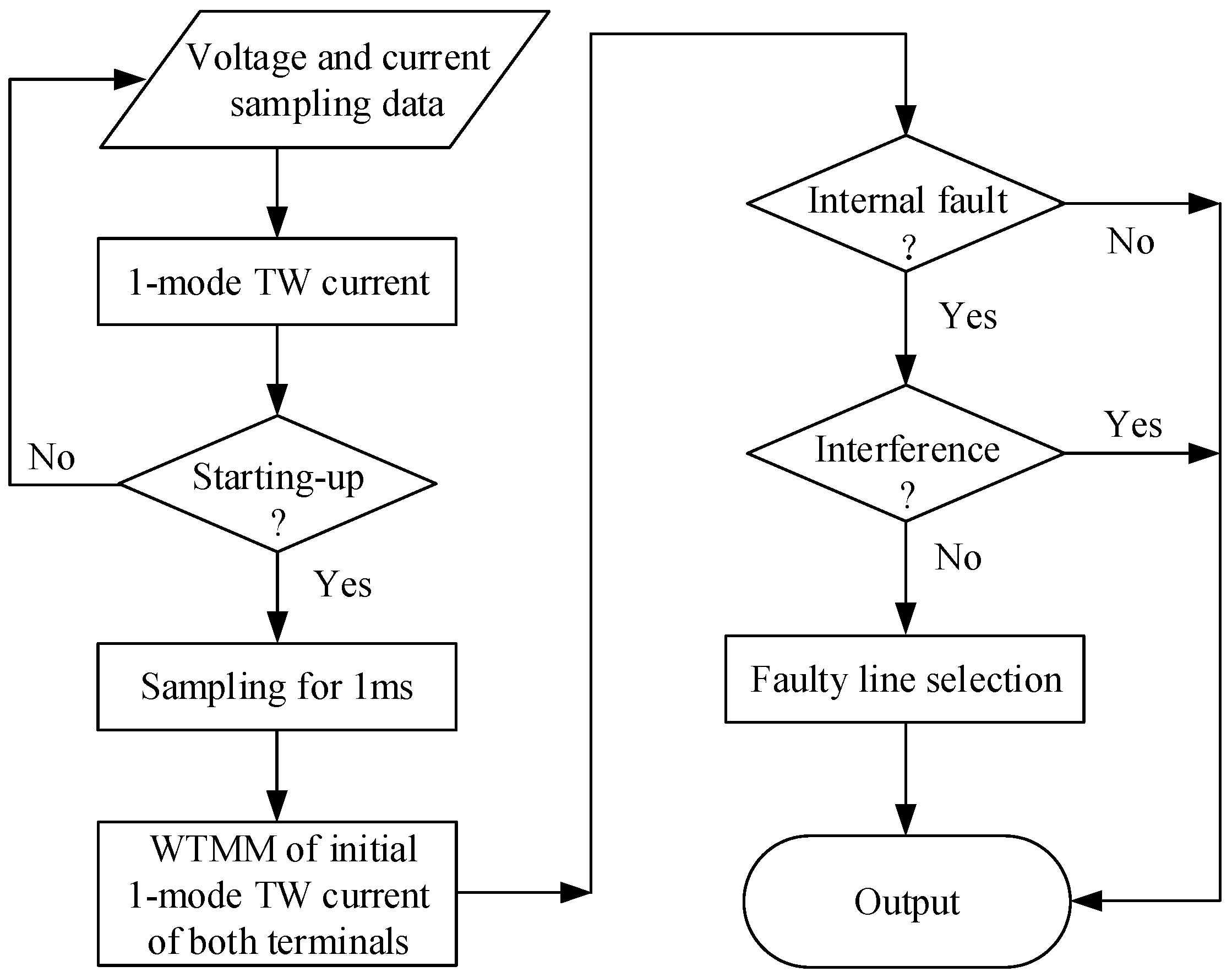
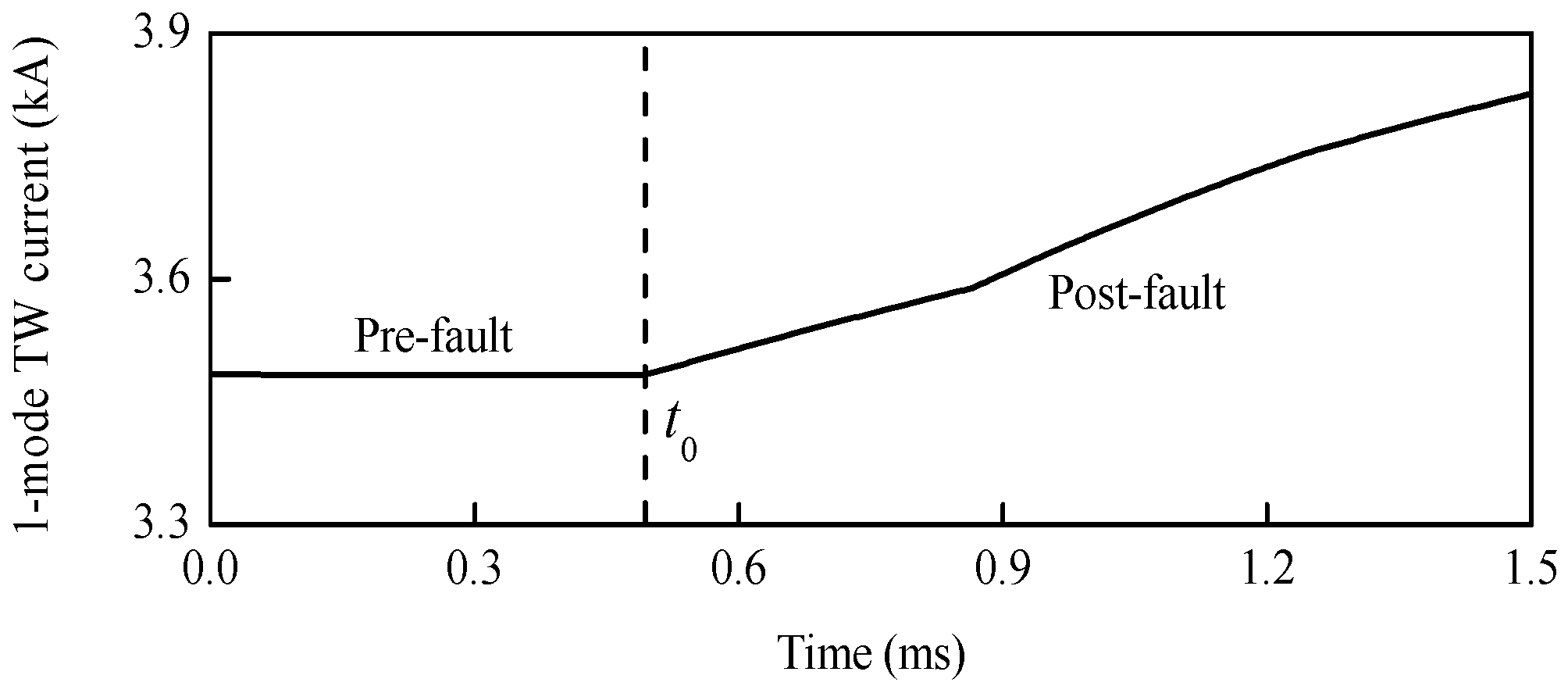
4.1. Starting-Up Element
4.2. Fault Section Identification
4.3. Faulty Line Selection
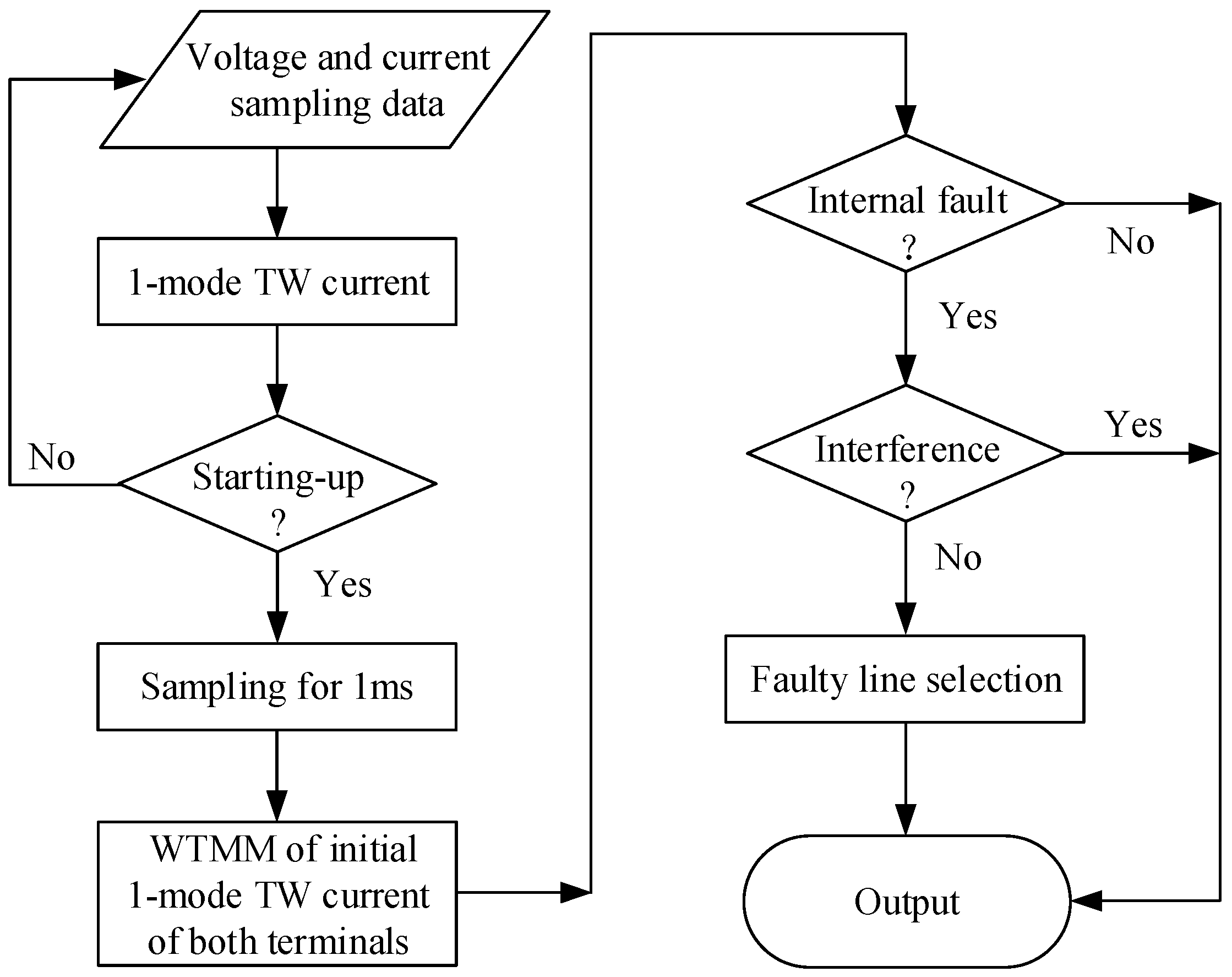
4.4. Flow Chart of Protection Scheme
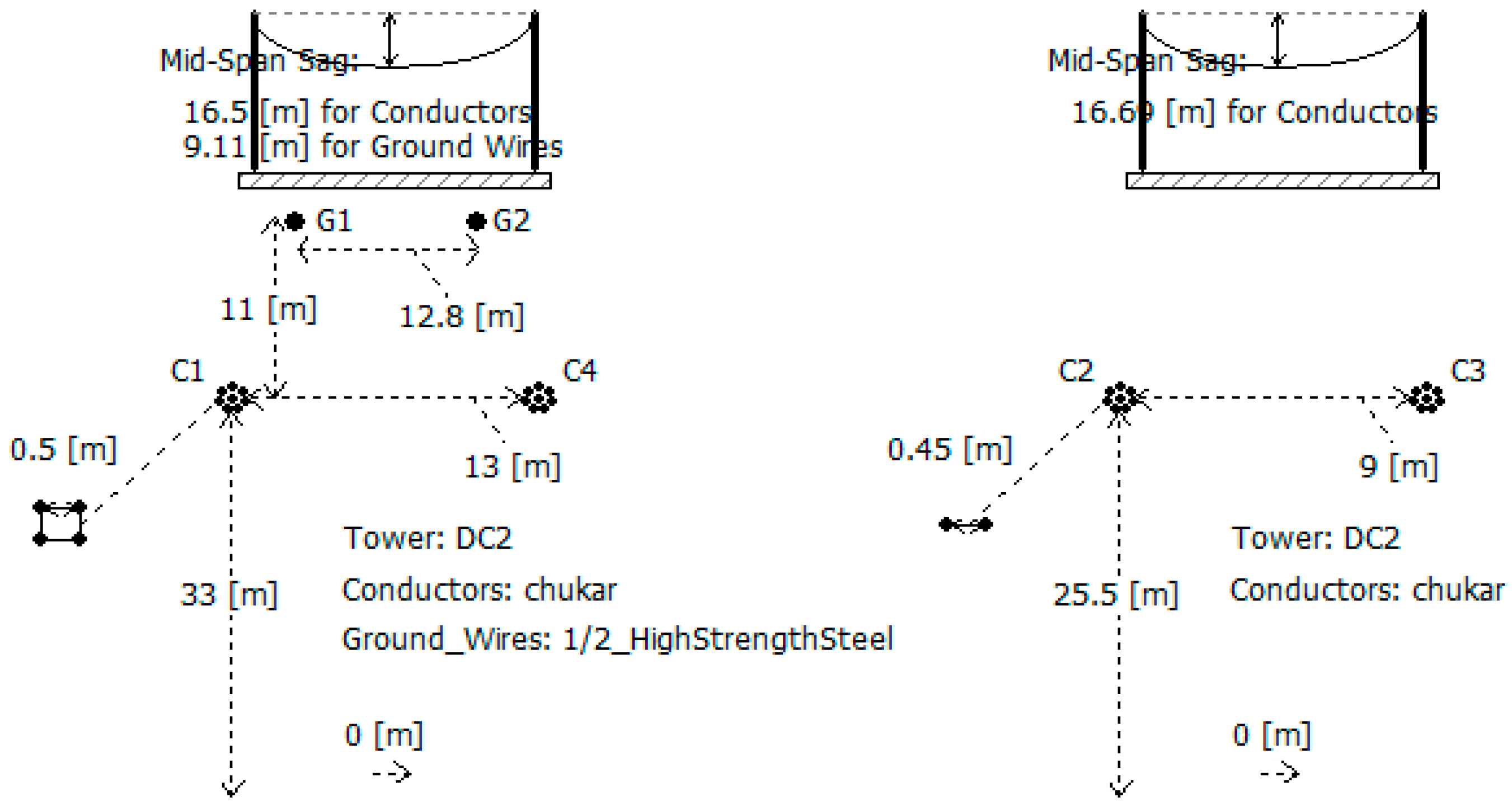
5. Simulations
5.1. Performance of the Starting-Up Element
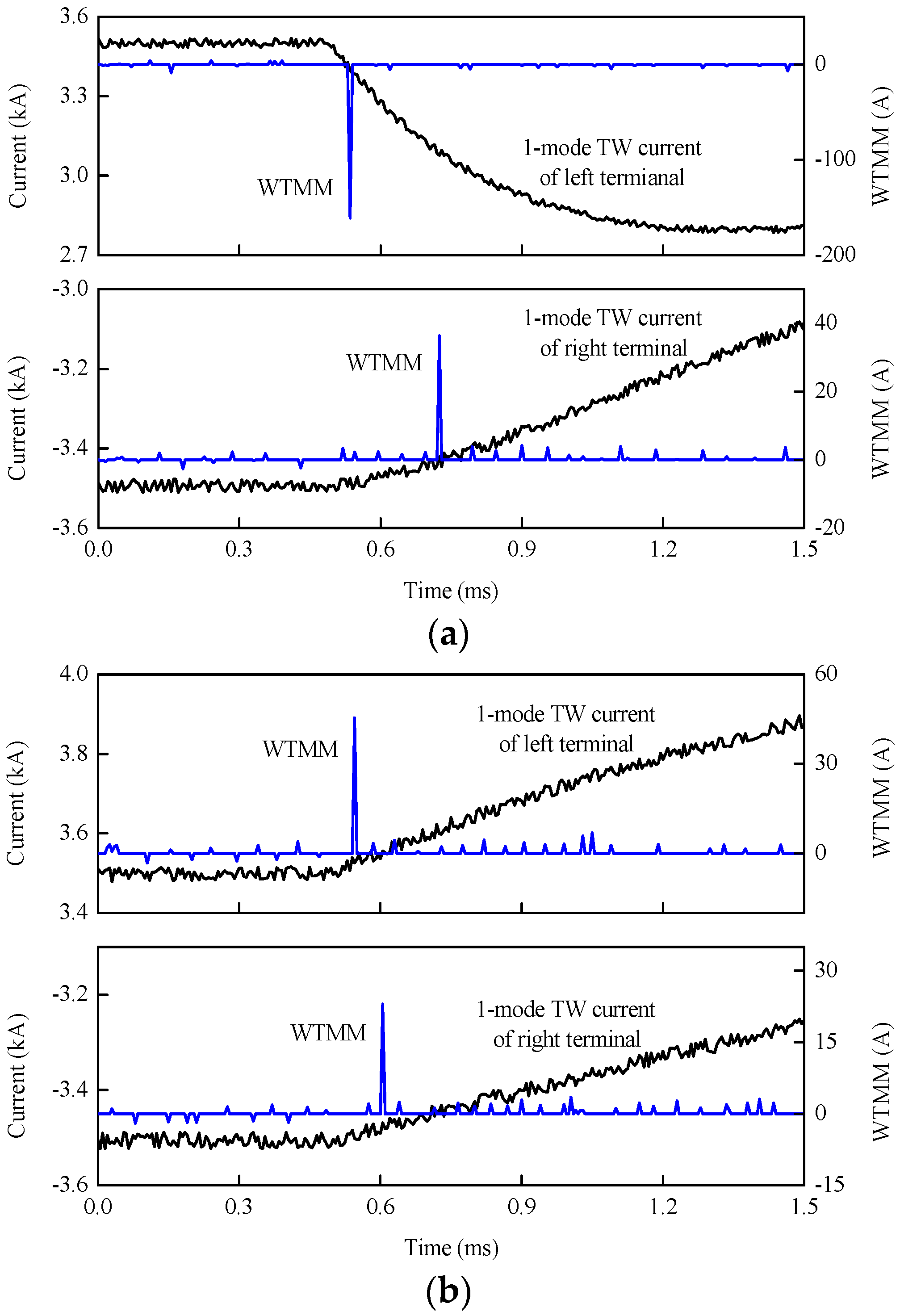
5.2. Performance of Fault Section Identification
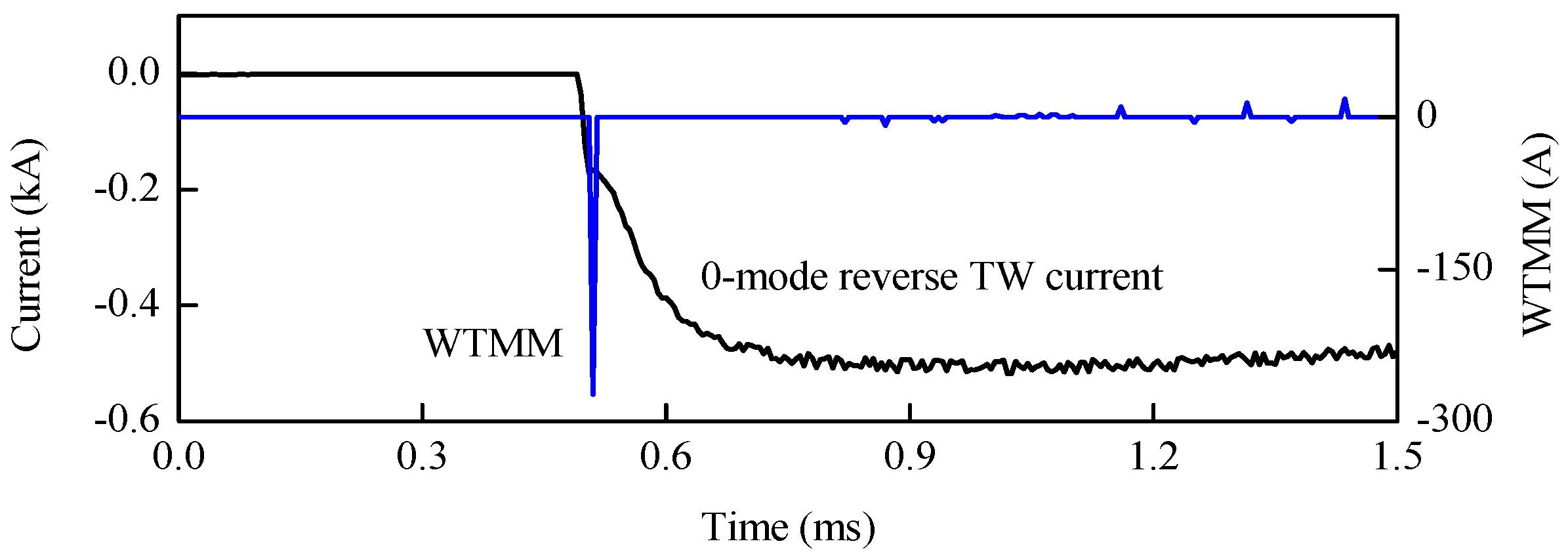
5.3. Performance of Faulty Line Selection
5.3.1. Different Fault Types
5.3.2. Different Transition Resistances
5.3.3. Different Fault Distances
5.4. Performance Under Noise Disturbance
5.4.1. Fault Section Identification Under Noise Disturbance
5.4.2. Faulty Line Selection Under Noise Disturbance
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Flourentzou, N.; Agelidis, V.G.; Demetriades, G.D. VSC-based HVDC power transmission systems: An overview. IEEE Trans. Power Electron. 2009, 24, 592–602. [Google Scholar] [CrossRef]
- Nami, A.; Liang, J.; Dijkhuizen, F.; Demetriades, G.D. Modular multilevel converters for HVDC applications: Review on converter cells and functionalities. IEEE Trans. Power Electron. 2015, 30, 18–36. [Google Scholar] [CrossRef]
- Liu, J.; Tai, N.; Fan, C. Transient-voltage-based protection scheme for DC line faults in the multiterminal VSC-HVDC system. IEEE Trans. Power Deliv. 2017, 32, 1483–1494. [Google Scholar] [CrossRef]
- Li, S.; Chen, W.; Yin, X.; Chen, D. Protection scheme for VSC-HVDC transmission lines based on transverse differential current. IET Gener. Transm. Dist. 2017, 11, 2805–2813. [Google Scholar] [CrossRef]
- Li, X.; Song, Q.; Liu, W.; Rao, H.; Xu, S.; Li, L. Protection of nonpermanent faults on DC overhead lines in MMC-based HVDC systems. IEEE Trans. Power Deliv. 2013, 28, 483–490. [Google Scholar] [CrossRef]
- Xue, S.; Lian, J.; Qi, J.; Fan, B. Pole-to-ground fault analysis and fast protection scheme for HVDC based on overhead transmission lines. Energies 2017, 10, 1059. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, S.; You, M.; Cao, R. Research on transient-based protection for HVDC lines. Power Syst. Prot. Control 2010, 38, 18–23. (In Chinese) [Google Scholar]
- Zhang, M.; He, J.; Luo, G.; Wang, X. Local information-based fault location method for multi-terminal flexible DC grid. Electr. Power Autom. Equip. 2018, 38, 155–161. (In Chinese) [Google Scholar]
- Yu, X.; Xiao, L.; Lin, L.; Qiu, Q.; Zhang, Z. Single-ended Fast Fault Detection Scheme for MMC-based HVDC. High Volt. Eng. 2018, 44, 440–447. (In Chinese) [Google Scholar]
- Dong, X.; Tang, L.; Shi, S.; Qiu, Y.; Kong, M.; Pang, H. Configuration scheme of transmission line protection for flexible HVDC grid. Power Syst. Technol. 2018, 42, 1752–1759. (In Chinese) [Google Scholar]
- Gibo, N.; Takenaka, K.; Verma, S.C.; Sugimoto, S.; Ogawa, S. Protection scheme of voltage sourced converters based HVDC system under DC fault. IEEE/PES Transm. Distrib. Conf. Exhib. 2002, 2, 1320–1325. [Google Scholar]
- Xing, L.; Chen, Q.; Gao, Z.; Fu, Z. A new protection principle for HVDC transmission lines based on fault component of voltage and current. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–6. [Google Scholar]
- Song, G.; Cai, X.; Gao, S.; Suonan, J.; Li, G. Novel current differential protection principle of VSC-HVDC considering frequency-dependent characteristic of cable line. Proc. CSEE 2011, 31, 105–111. (In Chinese) [Google Scholar]
- Ha, H.X.; Yu, Y.; Yi, R.P.; Bo, Z.Q.; Chen, B. Novel scheme of travelling wave based differential protection for bipolar HVDC transmission lines. In Proceedings of the 2010 International Conference on Power System Technology, Hangzhou, China, 24–28 October 2010. [Google Scholar]
- Wang, L.; Chen, Q.; Xi, C. Study on the travelling wave differential protection and the improvement scheme for VSC-HVDC transmission lines. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016. [Google Scholar]
- Zhao, P.; Chen, Q.; Sun, K. A novel protection method for VSC-MTDC cable based on the transient DC current using the S transform. Int. J. Electr. Power Energy Syst. 2018, 97, 299–308. [Google Scholar] [CrossRef]
- Zhang, S.; Zou, G.; Huang, Q.; Gao, H. A traveling-wave-based fault location scheme for MMC-based multi-Terminal DC grids. Energies 2018, 11, 401. [Google Scholar] [CrossRef]
- He, J.; Li, B.; Li, Y.; Qiu, H.; Wang, C.; Dai, D. A fast directional pilot protection scheme for the MMC-based MTDC grid. Proc. CSEE 2017, 37, 6878–6887. (In Chinese) [Google Scholar]
- Tang, L.; Dong, X. Study on the characteristic of travelling wave differential current on half-wave-length AC transmission lines. Proc. CSEE 2017, 37, 2261–2269. (In Chinese) [Google Scholar]
- Suonan, J.; Gao, S.; Song, G.; Jiao, Z.; Kang, X. A Novel Fault-Location Method for HVDC Transmission Lines. IEEE Trans. Power Deliv. 2010, 25, 1203–1209. [Google Scholar] [CrossRef]
- Lei, A.; Dong, X.; Shi, S.; Wang, B.; Terzija, V. Equivalent traveling waves based current differential protection of EHV/UHV transmission lines. Int. J. Electr. Power Energy Syst. 2018, 97, 282–289. [Google Scholar] [CrossRef]
- Glowacz, A. DC motor fault analysis with the use of acoustic signals, Coiflet wavelet transform, and K-nearest neighbor classifier. Arch. Acoust. 2015, 40, 321–327. [Google Scholar] [CrossRef]
- Glowacz, A. Diagnostics of direct current machine based on analysis of acoustic signals with the use of symlet wavelet transform and modified classifier based on words. Maint. Reliab. 2014, 16, 554–558. [Google Scholar]
- Tang, L.; Dong, X.; Luo, S.; Shi, S.; Wang, B. A New Differential Protection of Transmission Line Based on Equivalent Travelling Wave. IEEE Trans. Power Deliv. 2017, 32, 1359–1369. [Google Scholar] [CrossRef]
- Dong, X.; Luo, S.; Shi, S.; Wang, B.; Wang, S.; Ren, L.; Xu, F. Implementation and Application of Practical Traveling-Wave-Based Directional Protection in UHV Transmission Lines. IEEE Trans. Power Deliv. 2016, 31, 294–302. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distances/km | Cut-off Frequencies | |
|---|---|---|
| P(ω)/kHz | Q(ω)/Hz | |
| 200 | 128.8 | 1380.4 |
| 500 | 39.8 | 213.8 |
| 1000 | 16.9 | 89.1 |
| 2000 | 6.3 | 47.9 |
| 3000 | 3.2 | 33.88 |
| Distance/km | Resistance/Ω | di1 | ||
|---|---|---|---|---|
| di1(k − 1) | di1(k) | di1(k + 1) | ||
| 0.5 | 0 | 3.71 | 863 | 842 |
| 100 | 3.76 | 524 | 420 | |
| 200 | 3.83 | 378 | 309 | |
| 300 | 3.79 | 297 | 255 | |
| 75 | 0 | 3.97 | 635 | 932 |
| 100 | 3.39 | 386 | 569 | |
| 200 | 3.29 | 278 | 410 | |
| 300 | 3.18 | 218 | 320 | |
| 150 | 0 | 3.34 | 533 | 893 |
| 100 | 3.53 | 319 | 538 | |
| 200 | 3.45 | 226 | 383 | |
| 300 | 3.35 | 261 | 300 | |
| 205.5 | 0 | 3.59 | 812 | 1012 |
| 100 | 3.88 | 523 | 748 | |
| 200 | 3.77 | 385 | 602 | |
| 300 | 3.81 | 305 | 503 | |
| Location | Resistances/Ω | WTMM(i1)/A | Result | |
|---|---|---|---|---|
| S3 Side | S4 Side | |||
| f1 | 0 | −165.5 | 37.29 | External fault |
| f2 | 0 | 56.67 | −171.5 | |
| DL34 | 0 | 82.87 | 43.17 | Internal fault |
| 100 | 60.84 | 31.69 | ||
| 200 | 48.2 | 25.11 | ||
| 300 | 40.01 | 20.87 | ||
| Types | Resistance/Ω | WTMM(ir0)/A | Result |
|---|---|---|---|
| 1 | 0 | −761.08 | Positive pole-to-ground fault |
| 100 | −467.51 | ||
| 200 | −337.33 | ||
| 300 | −263.84 | ||
| 2 | 0 | 761.24 | Negative pole-to-ground fault |
| 100 | 467.59 | ||
| 200 | 337.38 | ||
| 300 | 263.88 | ||
| 3 | 0 | 0.341 | Pole-to-pole fault |
| 100 | 0.328 | ||
| 200 | 0.328 | ||
| 300 | 0.329 |
| Types | Distances/km | WTMM(ir0)/A | Result |
|---|---|---|---|
| 1 | 0.5 | −424.4 | Positive pole-to-ground fault |
| 75 | −395.2 | ||
| 150 | −263.8 | ||
| 205.5 | −270.2 | ||
| 2 | 0.5 | 425.9 | Negative pole-to-ground fault |
| 75 | 396.8 | ||
| 150 | 263.9 | ||
| 205.5 | 270.6 | ||
| 3 | 0.5 | 0.28 | Pole-to-pole fault |
| 75 | 0.32 | ||
| 150 | 0.26 | ||
| 205.5 | −0.35 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pei, X.; Tang, G.; Zhang, S. A Novel Pilot Protection Principle Based on Modulus Traveling-Wave Currents for Voltage-Sourced Converter Based High Voltage Direct Current (VSC-HVDC) Transmission Lines. Energies 2018, 11, 2395. https://doi.org/10.3390/en11092395
Pei X, Tang G, Zhang S. A Novel Pilot Protection Principle Based on Modulus Traveling-Wave Currents for Voltage-Sourced Converter Based High Voltage Direct Current (VSC-HVDC) Transmission Lines. Energies. 2018; 11(9):2395. https://doi.org/10.3390/en11092395
Chicago/Turabian StylePei, Xiangyu, Guangfu Tang, and Shengmei Zhang. 2018. "A Novel Pilot Protection Principle Based on Modulus Traveling-Wave Currents for Voltage-Sourced Converter Based High Voltage Direct Current (VSC-HVDC) Transmission Lines" Energies 11, no. 9: 2395. https://doi.org/10.3390/en11092395
APA StylePei, X., Tang, G., & Zhang, S. (2018). A Novel Pilot Protection Principle Based on Modulus Traveling-Wave Currents for Voltage-Sourced Converter Based High Voltage Direct Current (VSC-HVDC) Transmission Lines. Energies, 11(9), 2395. https://doi.org/10.3390/en11092395