Quantitative Comparisons of Six-Phase Outer-Rotor Permanent-Magnet Brushless Machines for Electric Vehicles




Abstract
1. Introduction
2. Proposed Six-Phase Machine Topologies and Operation Principles
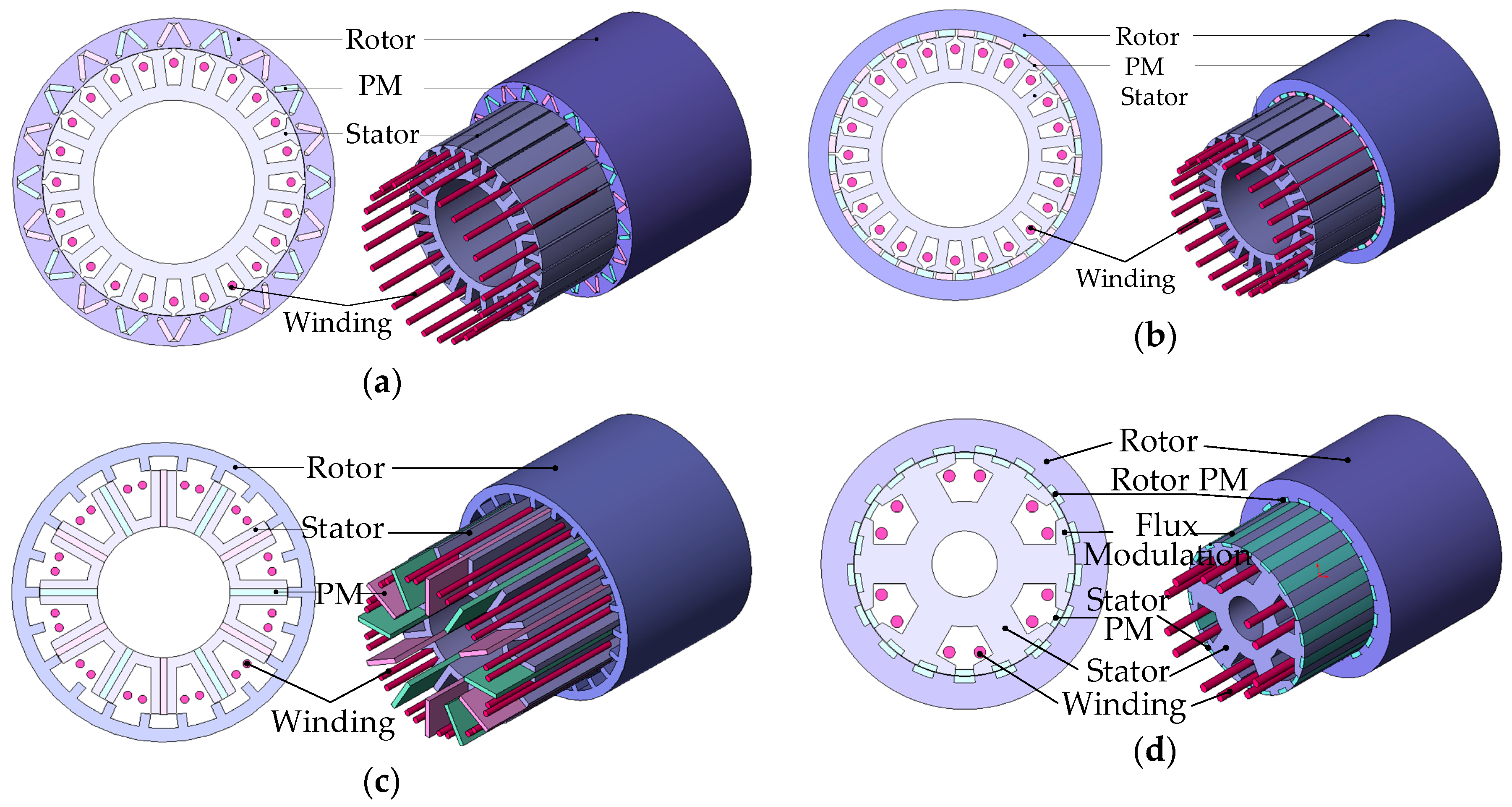
2.1. Proposed IPM Type and SPM Type
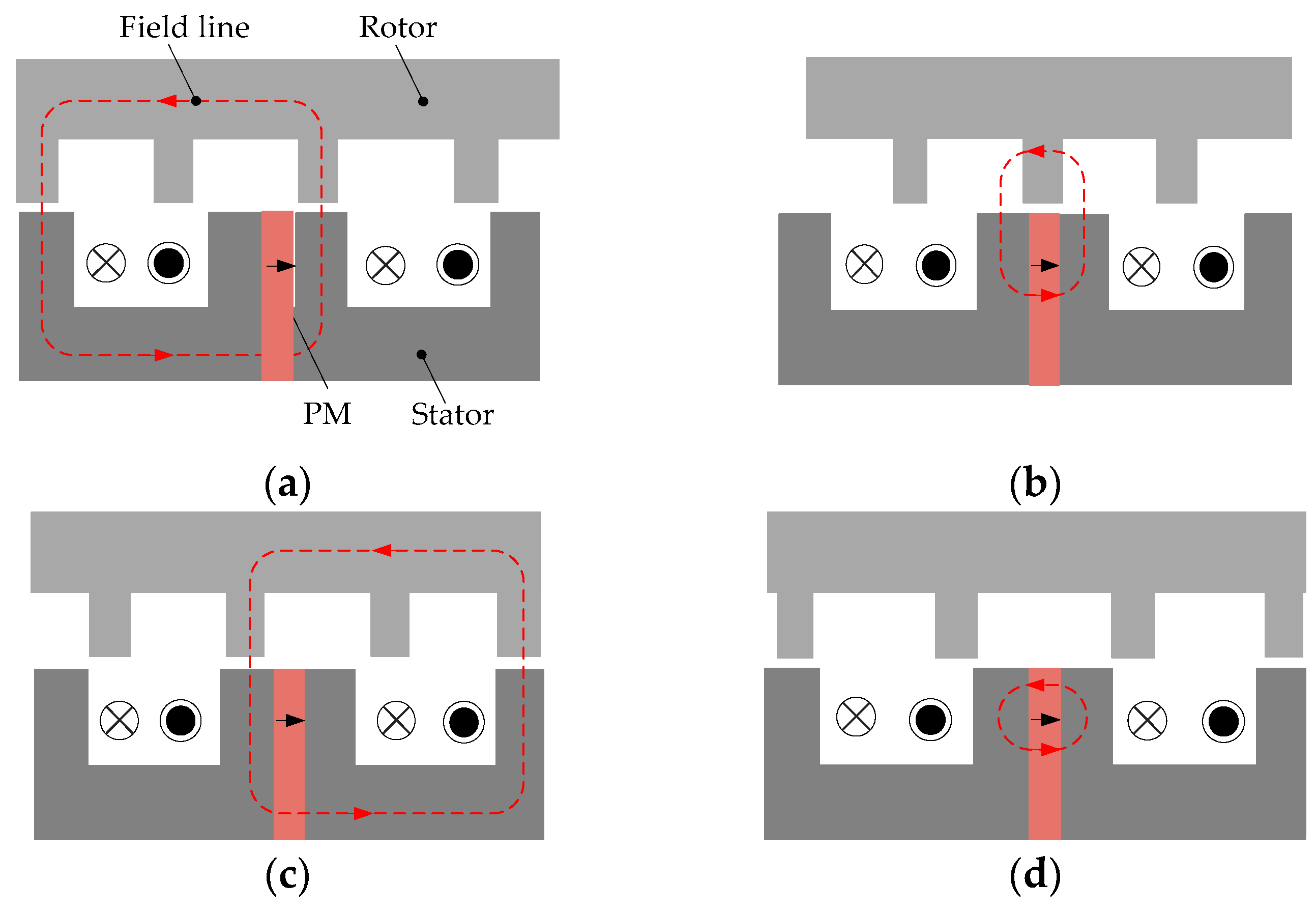
2.2. Proposed PMFS Type
2.3. PMV Type
3. Performance Comparison
3.1. Basic Characteristics
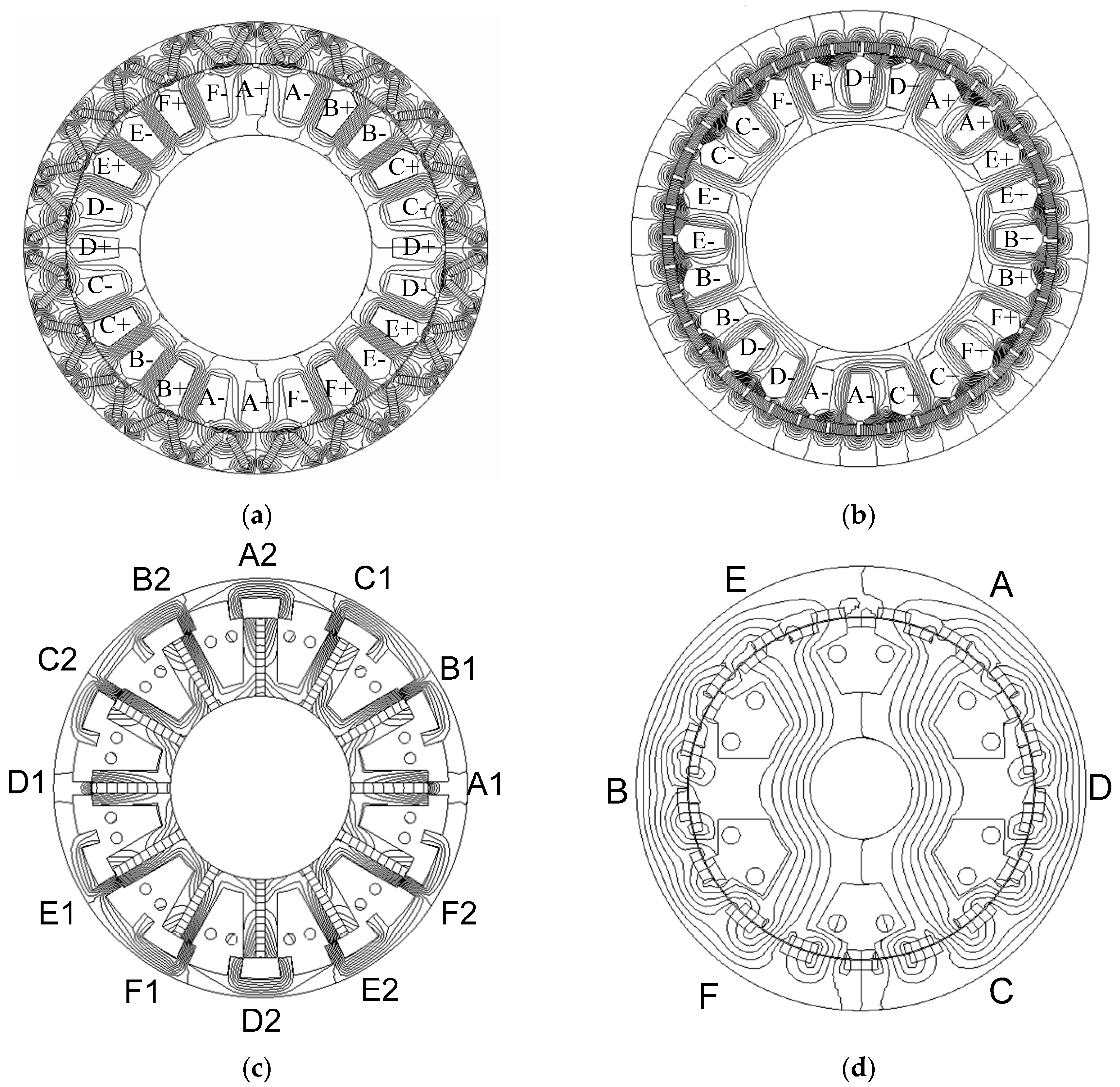
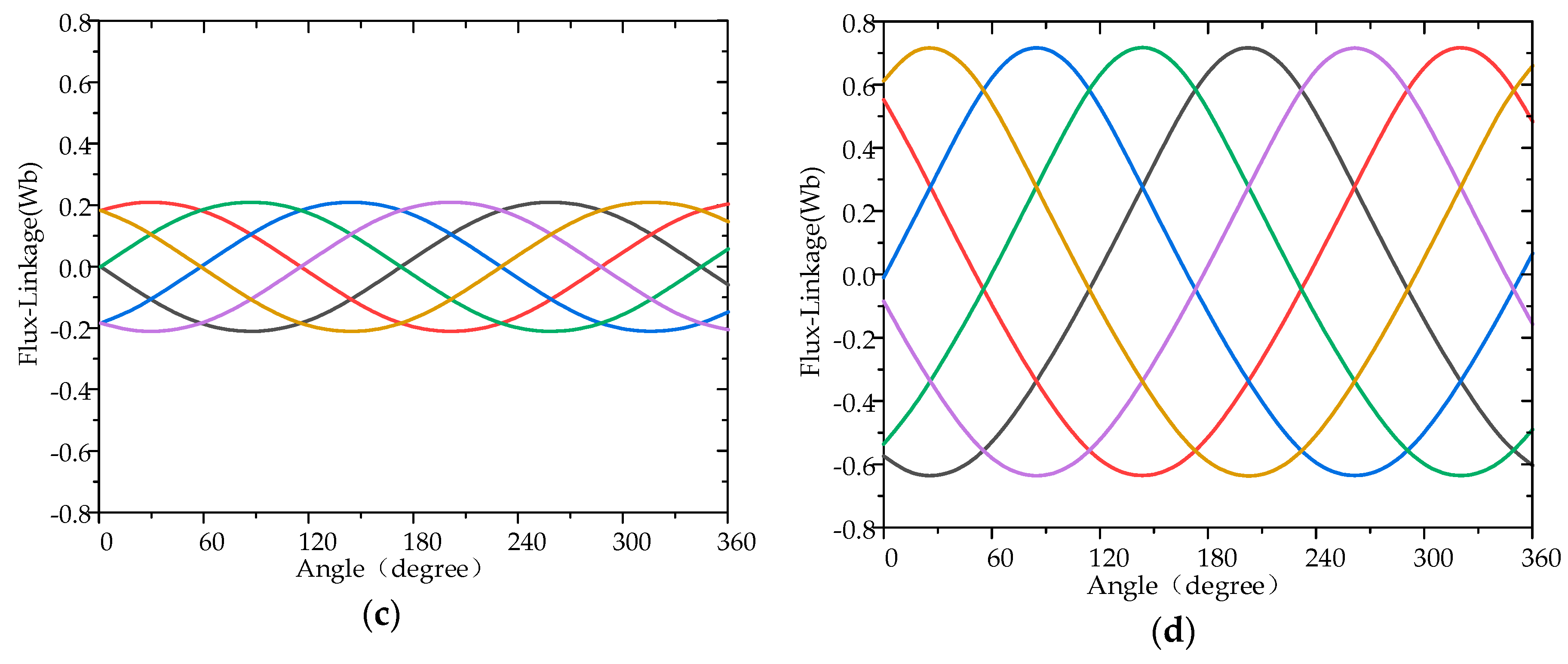
3.2. Normal Operation
3.3. Fault-Tolorant Operation Performance
4. Conclusions
- The PMV type can produce the largest steady torque under the low rotation speed.
- Based on the operation principle, the PMV type can be used for in-wheel direct-drive EV applications.
- The arrangement of PMs for the PMFS type can protect the PMs from rotational stresses, which is also suitable for EV applications.
- The SPM type should be carefully considered for EV applications, since it has the high cogging torque and the lowest related efficiency.
- The outer-rotor topology can be directly connected with the tire rim of the EV.
- The multiphase machine has a good fault tolerance ability, which is suitable for EV applications.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A comprehensive study of key electric vehicle (EV) components, technologies, challenges, impacts, and future direction of development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Chau, K.T.; Chan, C.C.; Liu, C. Overview of Permanent-Magnet Brushless Drives for Electric and Hybrid Electric Vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2246–2257. [Google Scholar] [CrossRef]
- De Santiago, J.; Bernhoff, H.; Ekergård, B.; Eriksson, S.; Ferhatovic, S.; Waters, R.; Leijon, M. Electrical Motor Drivelines in Commercial All-Electric Vehicles: A Review. IEEE Trans. Veh. Technol. 2012, 61, 475–484. [Google Scholar] [CrossRef]
- Lulhe, A.M.; Date, T.N. A technology review paper for drives used in electrical vehicle (EV) & hybrid electrical vehicles (HEV). In Proceedings of the 2015 International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kumaracoil, Tamilnadu, 18–19 December 2015; pp. 632–636. [Google Scholar]
- Lee, C.H.T.; Chau, K.T.; Liu, C. Design and Analysis of an Electronic-Geared Magnetless Machine for Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6705–6714. [Google Scholar] [CrossRef]
- Jenal, M.; Sulaiman, E.; Kumar, R. Effects of rotor pole number in outer rotor permanent magnet flux switching machine for light weight electric vehicle. In Proceedings of the 4th IET Clean Energy and Technology Conference (CEAT 2016), Kuala Lumpur, Malaysia, 14–15 November 2016; pp. 1–6. [Google Scholar]
- Rahim, N.A.; Ping, H.W.; Tadjuddin, M. Design of an In-Wheel Axial Flux Brushless DC Motor for Electric Vehicle. In Proceedings of the 2006 International Forum on Strategic Technology, Ulsan, Korea, 18–20 October 2006; pp. 16–19. [Google Scholar]
- Reddy, G.V.V.; Reddy, B.P.; Sivakumar, K. Design constraints of multiphase induction motor drives for electric vehicles. In Proceedings of the 2017 National Power Electronics Conference (NPEC), Pune, India, 18–20 December 2017; pp. 234–239. [Google Scholar]
- Ulu, C.; Korman, O.; Kömürgöz, G. Electromagnetic and thermal analysis/design of an induction motor for electric vehicles. In Proceedings of the 2017 8th International Conference on Mechanical and Aerospace Engineering (ICMAE), Jeju, Korea, 21–24 November 2017; pp. 6–10. [Google Scholar]
- Gu, W.; Zhu, X.; Quan, L.; Du, Y. Design and optimization of permanent magnet brushless machines for electric vehicle applications. Energies 2015, 8, 13996–14008. [Google Scholar] [CrossRef]
- Zhang, L.; Fan, Y.; Li, C.; Liu, C. Design and Analysis of a New Six-Phase Fault-Tolerant Hybrid-Excitation Motor for Electric Vehicles. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [PubMed]
- Mbadiwe, E.I.; Sulaiman, E.; Khan, F. Consideration of permanent magnet flux switching motor in segmented rotor for in-wheel vehicle propulsion. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; pp. 1–6. [Google Scholar]
- Tang, Y.; Ilhan, E.; Paulides, J.J.H.; Lomonova, E.A. Design considerations of flux-switching machines with permanent magnet or DC excitation. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 3–5 September 2013; pp. 1–10. [Google Scholar]
- Oner, Y.; Zhu, Z.Q.; Chu, W. Comparative Study of Vernier and Interior PM Machines for Automotive Application. In Proceedings of the 2016 IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 17–20 October 2016; pp. 1–6. [Google Scholar]
- Gudivada, R.; Bodnapu, K.K.; Vavillapalli, K.R. Virtual characterization of Interior Permanent Magnet (IPM) motor for EV traction applications. In Proceedings of the 2017 IEEE Transportation Electrification Conference (ITEC-India), Pune, India, 13–15 December 2017; pp. 1–4. [Google Scholar]
- Shu, Z.; Zhu, X.; Quan, L.; Du, Y.; Liu, C. Electromagnetic performance evaluation of an outer-rotor flux-switching permanent magnet motor based on electrical-thermal two-way coupling method. Energies 2017, 10, 677. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Ahmed, S.; Massoud, A. A new permanent-magnet vernier machine using a single layer winding layout for electric vehicles. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 703–708. [Google Scholar]
- Tong, C.; Wu, F.; Zheng, P.; Sui, Y.; Cheng, L. Analysis and design of a fault-tolerant six-phase permanent-magnet synchronous machine for electric vehicles. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 1629–1632. [Google Scholar]
- Huang, J.; Kang, M.; Yang, J.Q.; Jiang, H.B.; Liu, D. Multiphase machine theory and its applications. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 1–7. [Google Scholar]
- Zhao, J.; Zheng, Y.; Zhu, C.; Liu, X.; Li, B. A Novel Modular-Stator Outer-Rotor Flux-Switching Permanent-Magnet Motor. Energies 2017, 10, 937. [Google Scholar] [CrossRef]
- Wang, A.; Jia, Y.; Soong, W.L. Comparison of Five Topologies for an Interior Permanent-Magnet Machine for a Hybrid Electric Vehicle. IEEE Trans. Magn. 2011, 47, 3606–3609. [Google Scholar] [CrossRef]
- Zhang, X.; Ji, J.; Zheng, J.; Zhu, X. Improvement of Reluctance Torque in Fault-Tolerant Permanent-Magnet Machines with Fractional-Slot Concentrated-Windings. IEEE Trans. Appl. Superconduct. 2018, 28, 1–5. [Google Scholar] [CrossRef]
- Fan, Y.; Chen, S.; Tan, C.; Cheng, M. Design and investigation of a new outer-rotor IPM motor for EV and HEV in-wheel propulsion. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 17 March 2016; pp. 1–4. [Google Scholar]
- Yu, J.; Liu, C. Design of a double-stator hybrid flux switching permanent magnet machine for direct-drive robotics. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017; pp. 1–6. [Google Scholar]
- Chen, J.T.; Zhu, Z.Q.; Thomas, A.S.; Howe, D. Optimal combination of stator and rotor pole numbers in flux-switching PM brushless AC machines. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 2905–2910. [Google Scholar]
- Atallah, K.; Howe, D. A novel high-performance magnetic gear. IEEE Trans. Magn. 2001, 37, 2844–2846. [Google Scholar] [CrossRef]
- Shan, Z.; Liu, C.; Lee, C.H.T.; Chen, W.; Yu, F. Design and Comparison of Direct-Drive Stator-PM Machines for Electric Power Generation. In Proceedings of the 2016 IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 17–20 October 2016; pp. 1–6. [Google Scholar]
- Saeed, M.S.R.; Mohamed, E.E.M.; Ali, A.I.M. Parallel Partitioned-Rotor Switched flux PM machine for light hybrid/electric vehicles. In Proceedings of the 2018 International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 19–21 February 2018; pp. 380–385. [Google Scholar]
- Zhu, Z.Q.; Howe, D. Influence of design parameters on cogging torque in permanent magnet machines. IEEE Trans. Energy Convers. 2000, 15, 407–412. [Google Scholar] [CrossRef]
- Li, Z.; Chen, J.H.; Zhang, C.; Liu, L.; Wang, X. Cogging torque reduction in external-rotor permanent magnet torque motor based on different shape of magnet. In Proceedings of the 2017 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Ningbo, China, 19–21 November 2017; pp. 304–309. [Google Scholar]
- Liu, Y.; Yin, J.; Gong, B.; Yang, G. Comparative analysis of cogging torque reduction methods of variable flux reluctance machines for electric vehicles. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017; pp. 1–6. [Google Scholar]
- Setiabudy, R.; Rahardjo, A. Cogging torque reduction by modifying stator teeth and permanent magnet shape on a surface mounted PMSG. In Proceedings of the 2017 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 28–29 August 2017; pp. 227–232. [Google Scholar]
- Lee, D.H.; Jeong, C.L.; Hur, J. Analysis of cogging torque and torque ripple according to unevenly magnetized permanent magnets pattern in PMSM. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 2433–2438. [Google Scholar]
- Ma, G.; Li, G.; Zhou, R.; Guo, X.; Ju, L.; Xie, F. Effect of stator and rotor notches on cogging torque of permanent magnet synchronous motor. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017; pp. 1–5. [Google Scholar]
- Wu, F.; Zheng, P.; Jahns, T.M. Analytical Modeling of Interturn Short Circuit for Multiphase Fault-Tolerant PM Machines with Fractional Slot Concentrated Windings. IEEE Trans. Ind. Appl. 2017, 53, 1994–2006. [Google Scholar] [CrossRef]
- Zhang, S.; Habetler, T.G. A transient model of interior permanent magnet machines under stator winding inter-turn short circuit faults. In Proceedings of the IECON 2017–43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 5–8 November 2017; pp. 1765–1770. [Google Scholar]
- Kim, K.-H.; Choi, D.-U.; Gu, B.-G.; Jung, I.-S. Fault model and performance evaluation of an inverter-fed permanent magnet synchronous motor under winding shorted turn and inverter switch open. IET Electr. Power Appl. 2010, 4, 214–225. [Google Scholar] [CrossRef]
- Zhang, Y.; Chau, K.T.; Jiang, J.Z.; Zhang, D.; Liu, C. A finite element–analytical method for electromagnetic field analysis of electric machines with free rotation. IEEE Trans. Magn. 2006, 42, 3392–3394. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Zhong, J.; Li, W.; Li, F. Quantitative Comparison of Double-Stator Permanent Magnet Vernier Machines With and Without HTS Bulks. IEEE Trans. Appl. Supercond. 2012, 22, 5202405. [Google Scholar]
- Liu, C.; Chau, K.T.; Li, W. Loss analysis of permanent magnet hybrid brushless machines with and without HTS field windings. IEEE Trans. Appl. Supercond. 2012, 22, 1077–1080. [Google Scholar]
- Liu, C. Emerging electric machines and drives—An overview. IEEE Trans. Energy Convers. 2018. [Google Scholar] [CrossRef]
- Chen, M.; Chau, K.T.; Li, W.; Liu, C. Development of Non-rare-earth Magnetic Gears for Electric Vehicles. J. Asian Electr. Veh. 2012, 10, 1607–1613. [Google Scholar] [CrossRef]
- Liu, C.; Luo, Y. Overview of advanced control strategies for electric machines. Chin. J. Electr. Eng. 2017, 3, 53–61. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Machine Type | Advantages | Disadvantages |
|---|---|---|
| IPM |
|
|
| SPM | ||
| PMFSM |
|
|
| PMVM |
|
|
| Items | IPM | SPM | PMFSM | PMVM |
|---|---|---|---|---|
| Outer rotor diameter | 220 mm | 220 mm | 220 mm | 220 mm |
| Stator diameter | 179 mm | 179 mm | 197 mm | 169 mm |
| Air gap | 0.5 mm | 0.5 mm | 0.5 mm | 0.5 mm |
| Stack length | 100 mm | 100 mm | 100 mm | 100 mm |
| PM volume | 406 cm3 | 406 cm3 | 406 cm3 | 406 cm3 |
| PM thickness | 5 mm | 5 mm | 5 mm | 5 mm |
| Stator slots | 24 | 24 | 12 | 18 |
| Rotor pole-pairs | 10 | 20 | 22 | 17 |
| Item | IPM | SPM | PMFS | PMV |
|---|---|---|---|---|
| Eddy current loss | 874 W | 1763 W | 1291 W | 424 W |
| Hysteresis loss | 140 W | 151 W | 147 W | 225 W |
| Copper loss | 163 W | 283 W | 178 W | 197 W |
| Other loss | 200 W | 200 W | 200 W | 200 W |
| Overall power | 21,047 W | 11,461 W | 13,686 W | 13,678 W |
| Efficiency | 93.45% | 79.09% | 86.73% | 92.89% |
| Items | IPM | SPM | PMFS | PMV |
|---|---|---|---|---|
| Torque ripple | 15.52% | 40.25% | 3.83% | 11.88% |
| Torque density | 24.71 kN·m/m³ | 23.98 kN·m/m³ | 29.83 kN·m/m³ | 52.58 kN·m/m³ |
| Efficiency | 93.45% | 79.09% | 86.73% | 92.89% |
| Power | 21,047 W | 11,461 W | 13,686 W | 13,678 W |
| Base speed | 2000 r/min | 1000 r/min | 1000 r/min | 600 r/min |
| Items | IPM | SPM | PMFS | PMV |
|---|---|---|---|---|
| Efficency | high | moderate | moderate | high |
| Torque density | moderate | moderate | moderate | high |
| Thermal dissipaition | moderate | moderate | good | moderate |
| Cost effectivelyness | moderate | low | moderate | high |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Y.; Liu, C.; Lee, C.H.T. Quantitative Comparisons of Six-Phase Outer-Rotor Permanent-Magnet Brushless Machines for Electric Vehicles. Energies 2018, 11, 2141. https://doi.org/10.3390/en11082141
Yao Y, Liu C, Lee CHT. Quantitative Comparisons of Six-Phase Outer-Rotor Permanent-Magnet Brushless Machines for Electric Vehicles. Energies. 2018; 11(8):2141. https://doi.org/10.3390/en11082141
Chicago/Turabian StyleYao, Yuqing, Chunhua Liu, and Christopher H.T. Lee. 2018. "Quantitative Comparisons of Six-Phase Outer-Rotor Permanent-Magnet Brushless Machines for Electric Vehicles" Energies 11, no. 8: 2141. https://doi.org/10.3390/en11082141
APA StyleYao, Y., Liu, C., & Lee, C. H. T. (2018). Quantitative Comparisons of Six-Phase Outer-Rotor Permanent-Magnet Brushless Machines for Electric Vehicles. Energies, 11(8), 2141. https://doi.org/10.3390/en11082141