A Novel Protection and Location Scheme for Pole-to-Pole Fault in MMC-MVDC Distribution Grid




Abstract
1. Introduction
2. Fault Analysis of DC Distribution Grid
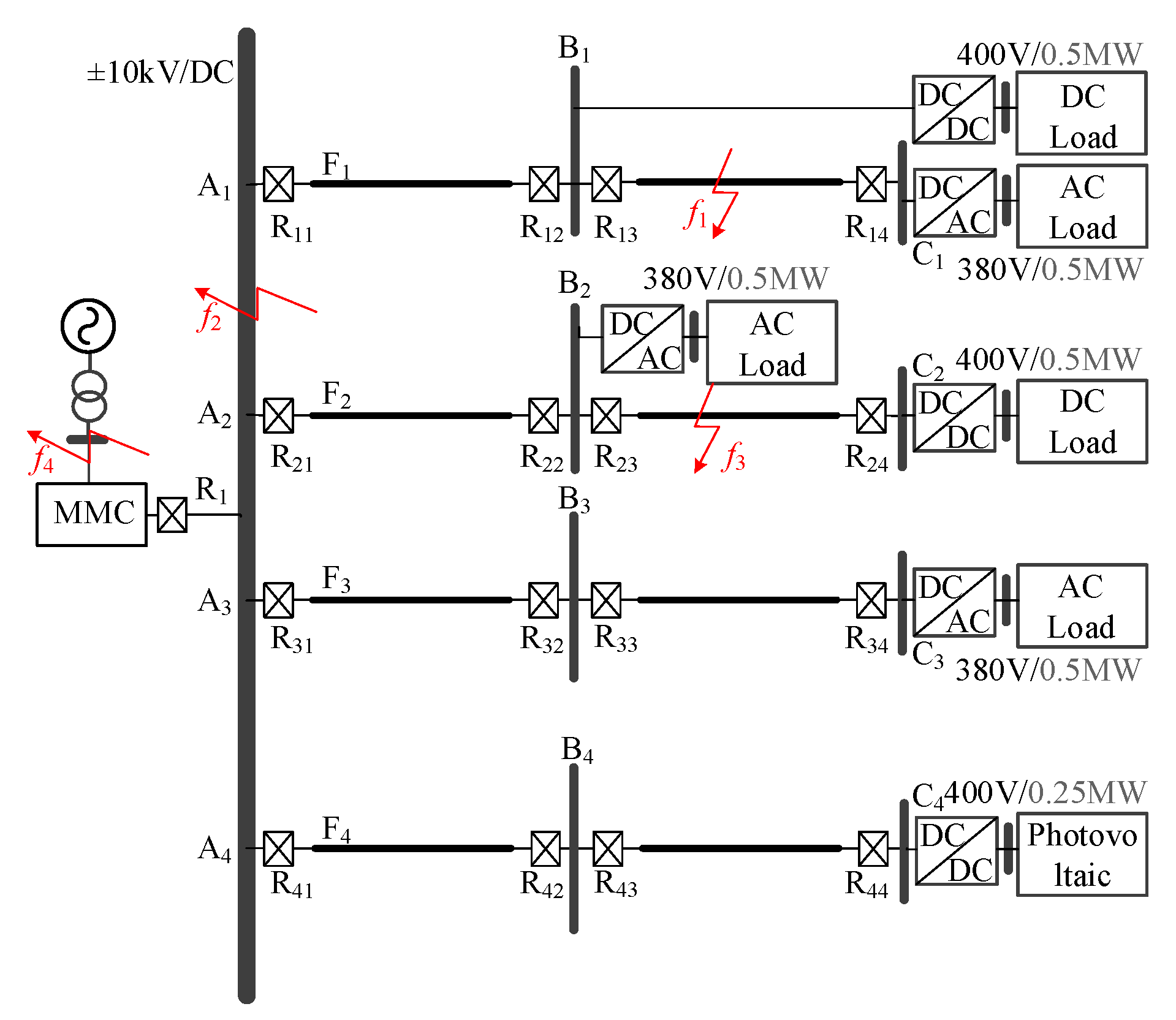
2.1. Radial MMC-MVDC Distribution Grid Topology
2.2. Transient Analysis of DC Feeders
2.3. Transient Analysis of Feeder Segment
- (1)
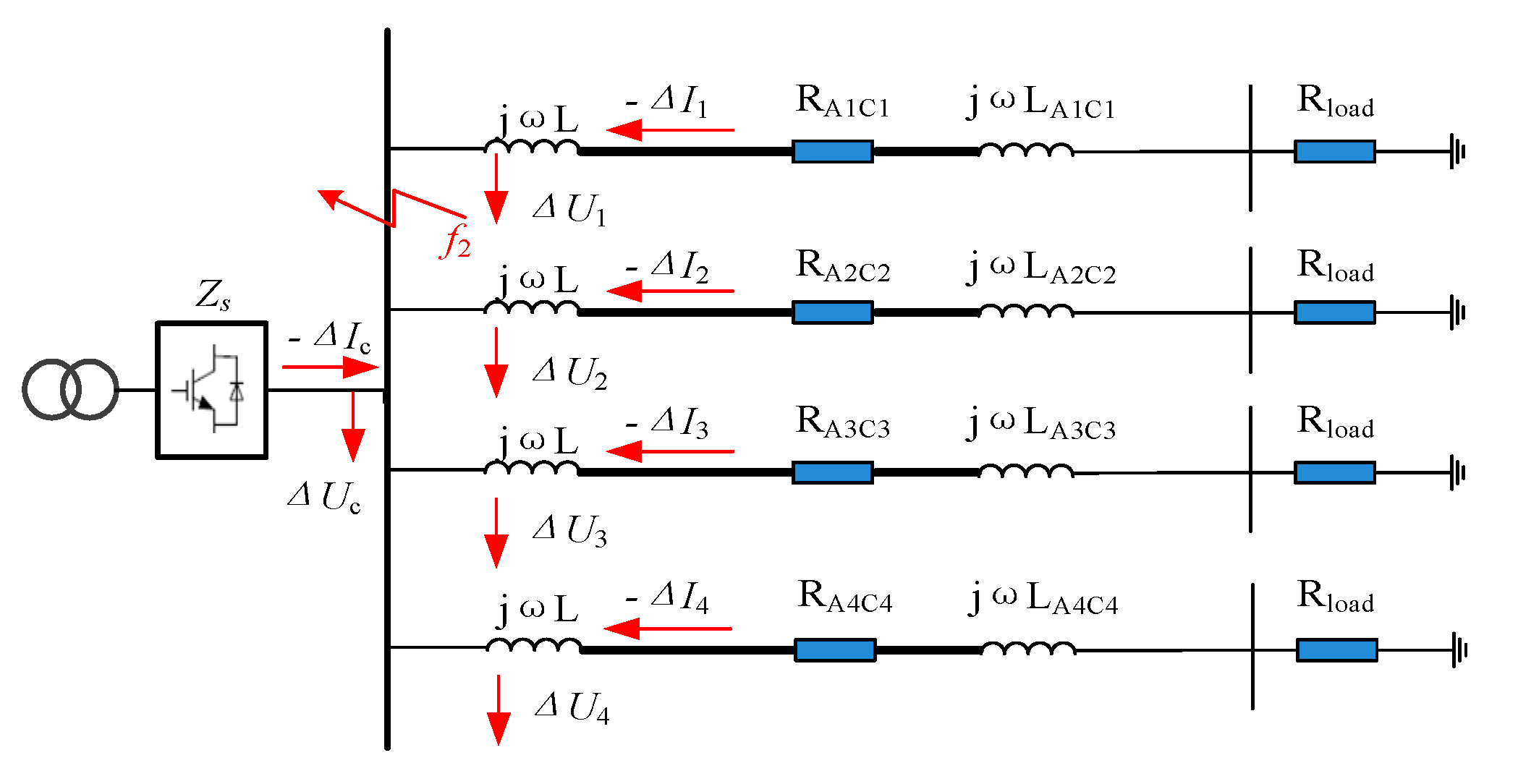
- Internal fault of feeder segment: Take the fault at f1 in Figure 1 as an example, when the internal fault occurs at f1 for the segment B1C1, the superimposed circuit is illustrated as Figure 5. Assume the positive current direction is from busbar to the line for convenience. According to superposition principle, a negative voltage source ΔUF is equivalent to be added at the fault point.Where, ΔIB1C1, ΔIC1B1 respectively represent current fault components on both sides of segment B1C1. The load is generally connected to the DC busbar via a charging capacitor in the converters. Therefore, when the fault occurs at f1, both sides feed current to the fault point. According to the specified positive direction, the current fault component detected by R13 and R14 should have the same polarity.
- (2)
- External fault of feeder segment: As there is no boundary between the segments of the same feeder, the current is almost not blocked from propagating between segment A1B1 and segment B1C1. Therefore, the polarities of the current fault component of the normal feeder detected by R11 and R12 are opposite.
2.4. Transient Analysis of Fault on the Bus
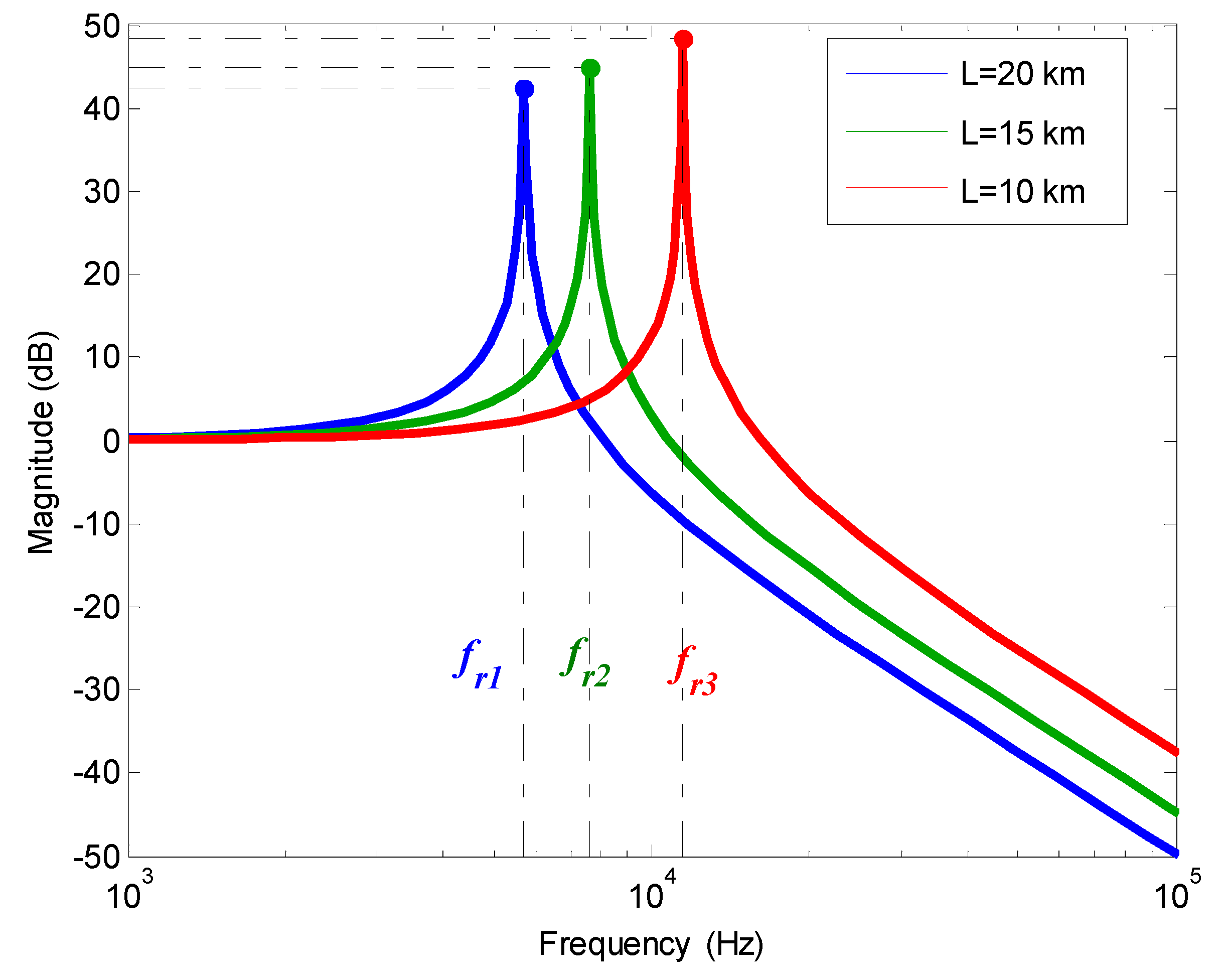
2.5. Analysis of Current Fault Component Characteristic Frequency Band
3. Application of S-Transform
3.1. The S-Transform Theory
3.2. S transform Characteristic Frequency Band (STCFB)
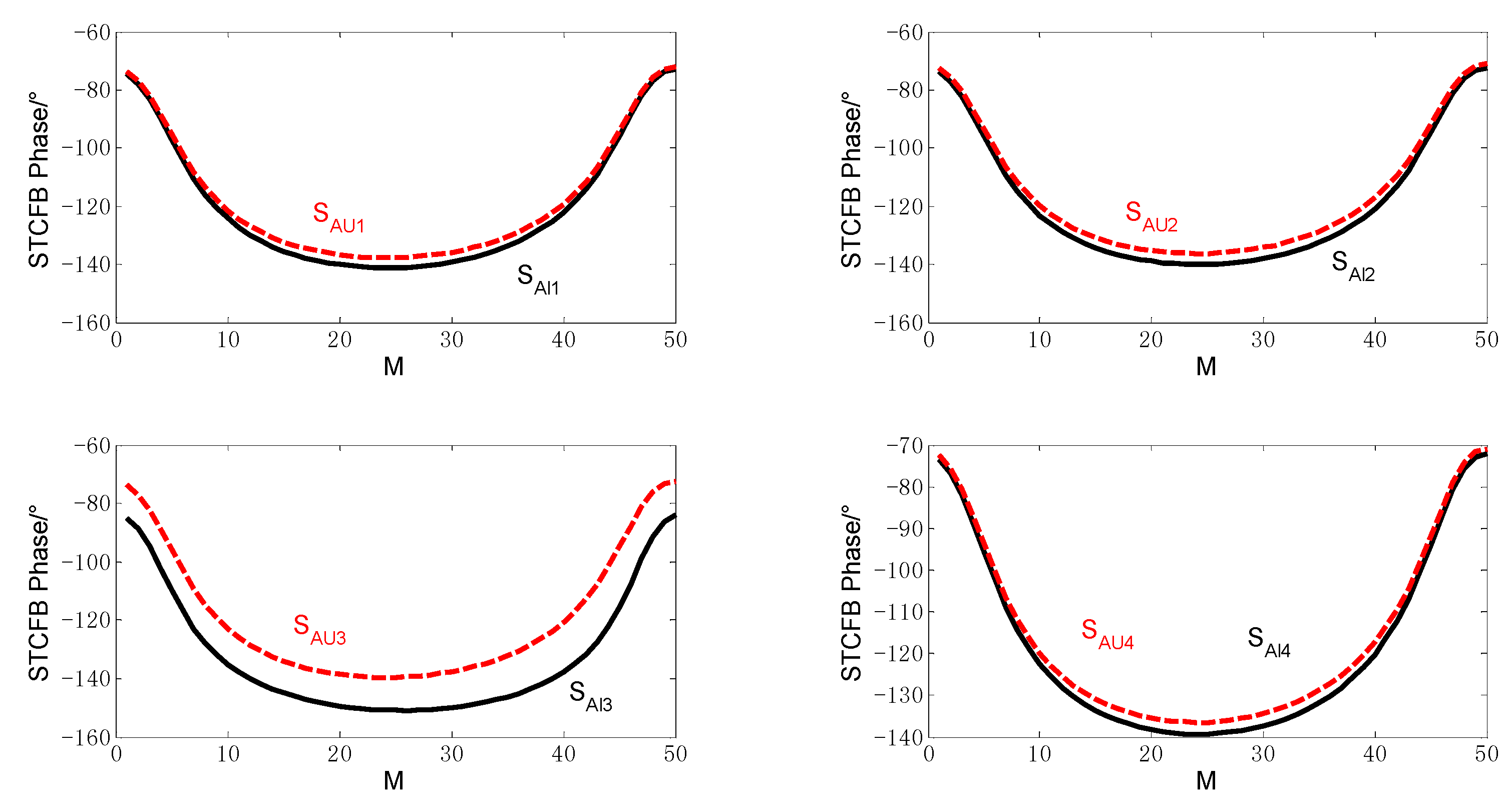
3.3. Analysis of STCFB Phase
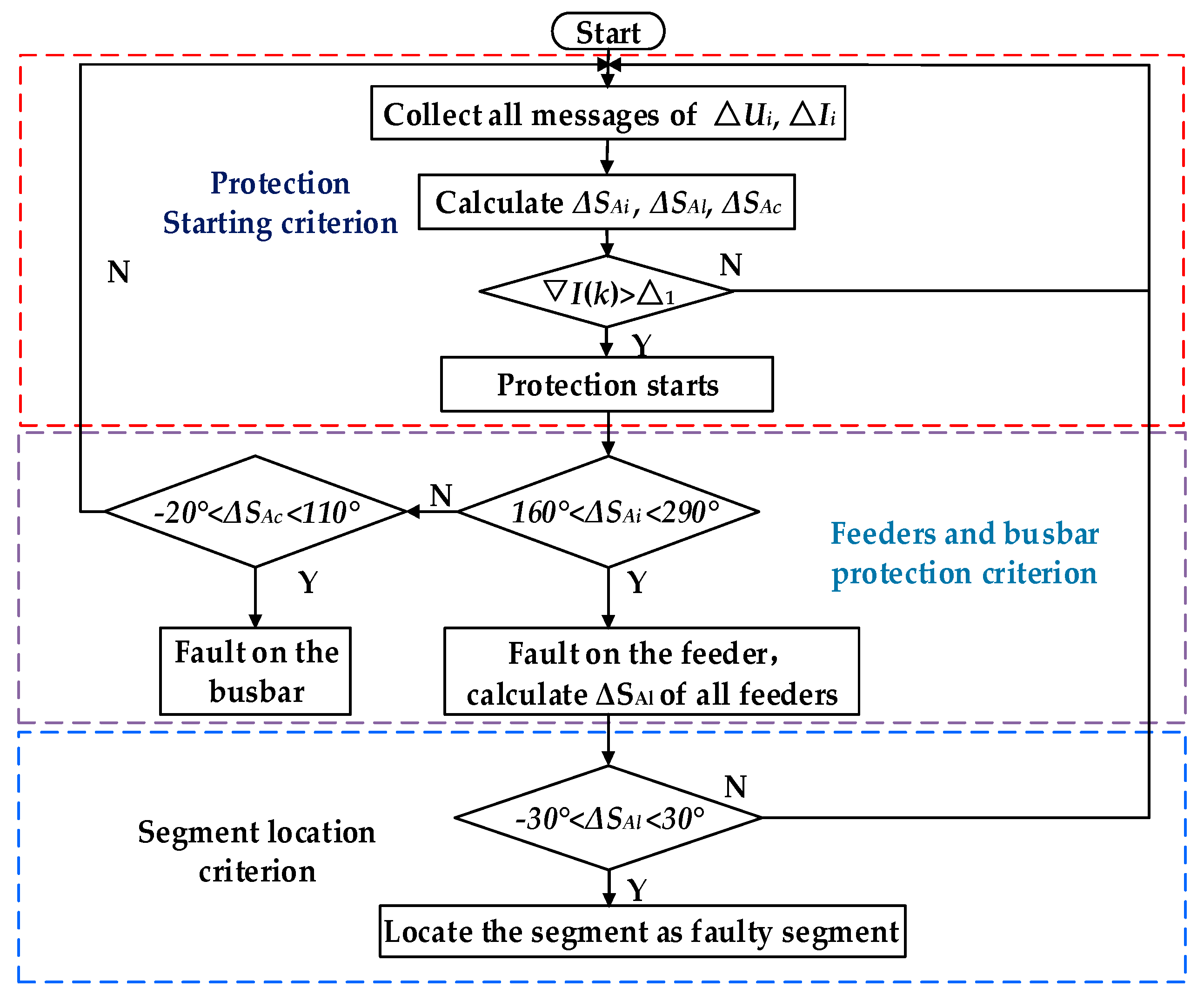
4. Protection and Location Scheme Based on S-Transform
4.1. Protection Starting Criterion
4.2. Protection Criterion on the Busbar and Feeders
4.3. Faulty Segment Location Criterion
4.4. Flow Chart of Protection and Location Scheme
5. Simulation and Analysis
5.1. Metallic Pole-to-Pole Fault
5.2. Metallic Bus Fault
5.3. Simulation for Influencing Factors
- (1)
- (2)
- Simulation of fault on the busbar under different fault resistances:
- (3)
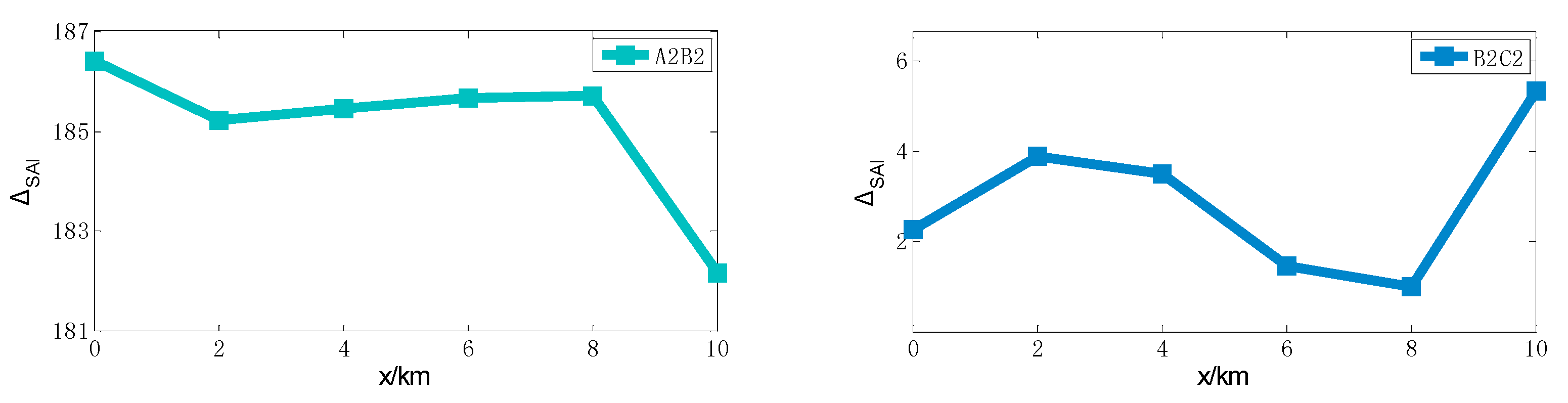
- Simulation of different fault locations: Set the pole-to-pole fault at f3 and take the transition resistance as 20Ω. The simulation results of STCFB Phase difference on both sides of segment A2B2 and B2C2 are shown in Figure 13. The abscissa indicates the distance from the fault point to A2.
- (4)
- Noise: The noise interferences will be doped in the voltage and current fault component, which will easily cause maloperation of protection. Therefore, Gaussian white noise with different decibels is added to the voltage and current fault component signals. The simulation results are shown in Table 9.
- (5)
- Fault on AC side: Different types of pole-to-pole faults are set at f4 on the AC busbar. According to the simulation, during the entire transient process, < Δ1 is always satisfied. Therefore, the protection does not start, and the system can still operate normally.
6. Conclusions
- (1)
- The simulation results show that influencing factors such as the fault resistance, the noises and fault position, can hardly affect the correct operation of the proposed criteria.
- (2)
- Utilizing the non-unit data and the data window of 2 ms to protect the feeder and the busbar, the protection is fast and reliable.
- (3)
- The criteria only utilizes the current and voltage fault component to protect the system and locate the fault, which is adaptable in the intricate topologies.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Bukhari, S.; Zaman, M.; Haider, R.; Oh, Y.; Kim, C. A protection scheme for microgrid with multiple distributed generations using superimposed reactive energy. Int. J. Electr. Power Energy Syst. 2017, 92, 156–166. [Google Scholar] [CrossRef]
- Li, X.; Cui, X.; Lu, T.; Wang, D.; Ma, W.; Bian, X. Comparison between the audible noises generated from single corona source under DC and AC corona discharge. CSEE JPES 2015, 1, 23–30. [Google Scholar]
- Techakittiroj, K.; Wongpaibool, V. Co-existance between AC-Distribution and DC-Distribution: In the View of Appliances. Available online: http://repository.au.edu/bitstream/handle/6623004553/17921/Proceeding-Paper-Abstract-17921.PDF?sequence=2&isAllowed=y (accessed on 8 August 2018).
- Xue, S.; Gao, F.; Sun, W.; Li, B. Protection Principle for a DC Distribution System with a Resistive Superconductive Fault Current Limiter. Energies 2015, 8, 4839–4852. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Zabihi, S.; Caballero, J.C.T.; Catalão, J.P.S. A Novel Modulation Function-Based Control of Modular Multilevel Converters for High Voltage Direct Current Transmission Systems. Energies 2016, 9, 867. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Zabihi, S; Vechiu, I.; Catalão, J.P.S. A multi-loop control technique for the stable operation of modular multilevel converters in HVDC transmission systems. Int. J. Electr. Power Energy Syst. 2018, 96, 194–207. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Zabihi, S.; Catalão, J.P.S. Dynamic Model, Control and Stability Analysis of MMC in HVDC Transmission Systems. IEEE Trans. Power Deliv. 2017, 32, 1471–1482. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Taheri, S.; Vechiu, I.; Catalão, J.P.S. Novel Control Strategy for Modular Multilevel Converters Based on Differential Flatness Theory. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 888–897. [Google Scholar] [CrossRef]
- Sun, G.; Shi, B.; Zhao, Y.; Li, S. Research on the fault location method and protection configuration strategy of MMC based DC distribution grid. Power Syst. Prot. Control 2015, 43, 127–133. [Google Scholar]
- Xue, S.M.; Liu, C. Line-to-Line Fault Analysis and Location in a VSC-Based Low-Voltage DC Distribution Network. Energies 2018, 11, 536. [Google Scholar] [CrossRef]
- Jamali, S.Z.; Bukhari, S.B.A.; Khan, M.O.; Mehdi, M.; Noh, C.H.; Gwon, G.H.; Kim, C.H. Protection Scheme of a Last Mile Active LVDC Distribution Network with Reclosing Option. Energies 2018, 11, 1093. [Google Scholar] [CrossRef]
- Chaudhuri, N.R.; Chaudhuri, B.; Majumder, R.; Yazdani, A. Multi-Terminal Direct-Current Grids: Modeling, Analysis, and Control; Wiley-IEEE Press: Hoboken, NJ, USA, 2014. [Google Scholar]
- Mehrasa, M.; Pouresmaeil, E.; Akorede, M.F.; Zabihi, S.; Catalão, J.P.S. Function-based modulation control for modular multilevel converters under varying loading and parameters conditions. IET Gener. Transm. Distrib. 2017, 11, 3222–3230. [Google Scholar] [CrossRef]
- Azizi, S.; Afsharnia, S.; Sanaye-Pasand, M. Fault location on multi-terminal DC systems using synchronized current measurements. Int. J. Electr. Power Energy Syst. 2014, 63, 779–786. [Google Scholar] [CrossRef]
- Zhang, S.; Zou, G.B.; Huang, Q.; Gao, H. A Traveling-Wave-Based Fault Location Scheme for MMC-Based Multi-Terminal DC Grids. Energies 2018, 11, 401. [Google Scholar] [CrossRef]
- Leterme, W.; Beerten, J.; Hertem, D.V. Nonunit Protection of HVDC Grids with Inductive DC Cable Termination. IEEE Trans. Power Deliv. 2016, 31, 820–828. [Google Scholar] [CrossRef]
- Baran, M.E.; Mahajan, N.R. Overcurrent Protection on Voltage-Source-Converter-Based Multi-terminal DC Distribution Systems. IEEE Trans. Power Deliv. 2007, 22, 406–412. [Google Scholar] [CrossRef]
- Xue, S.M.; Chen, C.C.; Yi, J.; Li, B.; Wang, Y. Protection for DC Distribution System with Distributed Generator. J. Appl. Math. 2014, 2014, 1–12. [Google Scholar] [CrossRef]
- Feng, X.; Li, Q.; Pan, J. A novel fault location method and algorithm for DC distribution protection. IEEE Trans. Ind. Appl. 2017, 53, 1834–1840. [Google Scholar] [CrossRef]
- Tang, L.; Ooi, B.T. Locating and Isolating DC Faults in Multi-Terminal DC Systems. IEEE Trans. Power Deliv. 2007, 22, 1877–1884. [Google Scholar] [CrossRef]
- Zheng, X.; Tai, N.; Wu, Z.; Thorp, J. Harmonic current protection scheme for voltage source converter-based high-voltage direct current transmission system. IET Gener. Transm. Distrib. 2018, 8, 1509–1515. [Google Scholar] [CrossRef]
- Yang, J.; Fletcher, J.E.; O’Reilly, J. Multi terminal DC Wind Farm Collection Grid Internal Fault Analysis and Protection Design. IEEE Trans. Power Deliv. 2010, 25, 2308–2318. [Google Scholar] [CrossRef]
- Sneath, J.; Rajapakse, A.D. Fault Detection and Interruption in an Earthed HVDC Grid Using ROCOV and Hybrid DC Breakers. IEEE Trans. Power Deliv. 2016, 31, 973–981. [Google Scholar] [CrossRef]
- Song, G.B.; Luo, J.; Gao, S.P.; Wang, X.; Tassawar, K. Detection method for single-pole-grounded faulty feeder based on parameter identification in MVDC distribution grids. Int. J. Electr. Power Energy Syst. 2018, 97, 85–92. [Google Scholar] [CrossRef]
- Zhao, P.; Chen, Q.; Sun, K.; Xi, C. A Current Frequency Component-Based Fault-Location Method for Voltage-Source Converter-Based High-Voltage Direct Current (VSC-HVDC) Cables Using the S Transform. Energies 2017, 10, 1115. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R.P. Localization of the complex spectrum: the S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Kong, F.; Hao, Z.; Zhang, S.; Zhang, B. Development of a Novel Protection Device for Bipolar HVDC Transmission Lines. IEEE Trans. Power Deliv. 2014, 29, 227–2278. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Voltage of AC system | 110 kV |
| AC side rated voltage of MMC | 10 kV |
| Rated active power of MMC | 5 MW |
| Rated active power of photovoltaic | 0.25 MW |
| Levels of converters | 21 |
| Capacitance of MMC | 5000 μF |
| Inductance of bridge | 5 mH |
| Parameters | Value |
|---|---|
| Resistance | 0.125 Ω/km |
| Inductance | 0.72 mH/km |
| Capacitance to ground | 0.0048 μF/km |
| AmBm, BmCm (m = 1, 2, 3, 4) | 10 km |
| ΔSAi(°) | Simulation Results | |||
|---|---|---|---|---|
| F1 | F2 | F3 | F4 | |
| 188.461 | 6.435 | 7.055 | 6.492 | Fault on F1 |
| ΔSAl (°) | Simulation Results | |
|---|---|---|
| A1B1 | B1C1 | |
| 180.723 | 1.671 | Fault on B1C1 |
| ΔSAc (°) | ΔSAi (°) | Simulation Results | |||
|---|---|---|---|---|---|
| F1 | F2 | F3 | F4 | ||
| 25.613 | 2.647 | 3.258 | 13.495 | 2.480 | Fault on f2 |
| Resistance/Ω | ΔSAi (°) | Simulation Results | |||
|---|---|---|---|---|---|
| F1 | F2 | F3 | F4 | ||
| 20 | 189.713 | 7.124 | 7.253 | 7.053 | Fault on F1 |
| 50 | 190.541 | 7.521 | 8.552 | 7.535 | Fault on F1 |
| Resistance/Ω | ΔSAl (°) | Simulation Results | |
|---|---|---|---|
| A1B1 | B1C1 | ||
| 20 | 182.194 | 7.405 | Fault on B1C1 |
| 50 | 183.052 | 7.704 | Fault on B1C1 |
| Resistance/Ω | ΔSAc(°) | ΔSAi (°) | Simulation Results | |||
|---|---|---|---|---|---|---|
| F1 | F2 | F3 | F4 | |||
| 20 | 22.124 | 1.672 | 9.860 | 16.178 | 21.799 | Fault on busbar |
| 50 | 20.118 | 1.276 | 7.986 | 12.552 | 19.637 | Fault on busbar |
| Gaussian Noise/dB | ΔSAi (°) | Simulation Results | |||
|---|---|---|---|---|---|
| F1 | F2 | F3 | F4 | ||
| 30 | 188.697 | 7.505 | 9.208 | 7.532 | Fault on F1 |
| 40 | 188.758 | 6.695 | 6.901 | 6.368 | Fault on F1 |
| 80 | 188.458 | 6.437 | 7.050 | 6.487 | Fault on F1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, Y.; Zou, G.; Wei, X.; Sun, C.; Jiang, L. A Novel Protection and Location Scheme for Pole-to-Pole Fault in MMC-MVDC Distribution Grid. Energies 2018, 11, 2076. https://doi.org/10.3390/en11082076
Zeng Y, Zou G, Wei X, Sun C, Jiang L. A Novel Protection and Location Scheme for Pole-to-Pole Fault in MMC-MVDC Distribution Grid. Energies. 2018; 11(8):2076. https://doi.org/10.3390/en11082076
Chicago/Turabian StyleZeng, Yu, Guibin Zou, Xiuyan Wei, Chenjun Sun, and Lingtong Jiang. 2018. "A Novel Protection and Location Scheme for Pole-to-Pole Fault in MMC-MVDC Distribution Grid" Energies 11, no. 8: 2076. https://doi.org/10.3390/en11082076
APA StyleZeng, Y., Zou, G., Wei, X., Sun, C., & Jiang, L. (2018). A Novel Protection and Location Scheme for Pole-to-Pole Fault in MMC-MVDC Distribution Grid. Energies, 11(8), 2076. https://doi.org/10.3390/en11082076