Adaptive Hydraulic Potential Energy Transfer Technology and Its Application to Compressed Air Energy Storage

Abstract
:1. Introduction
2. Principle and Design
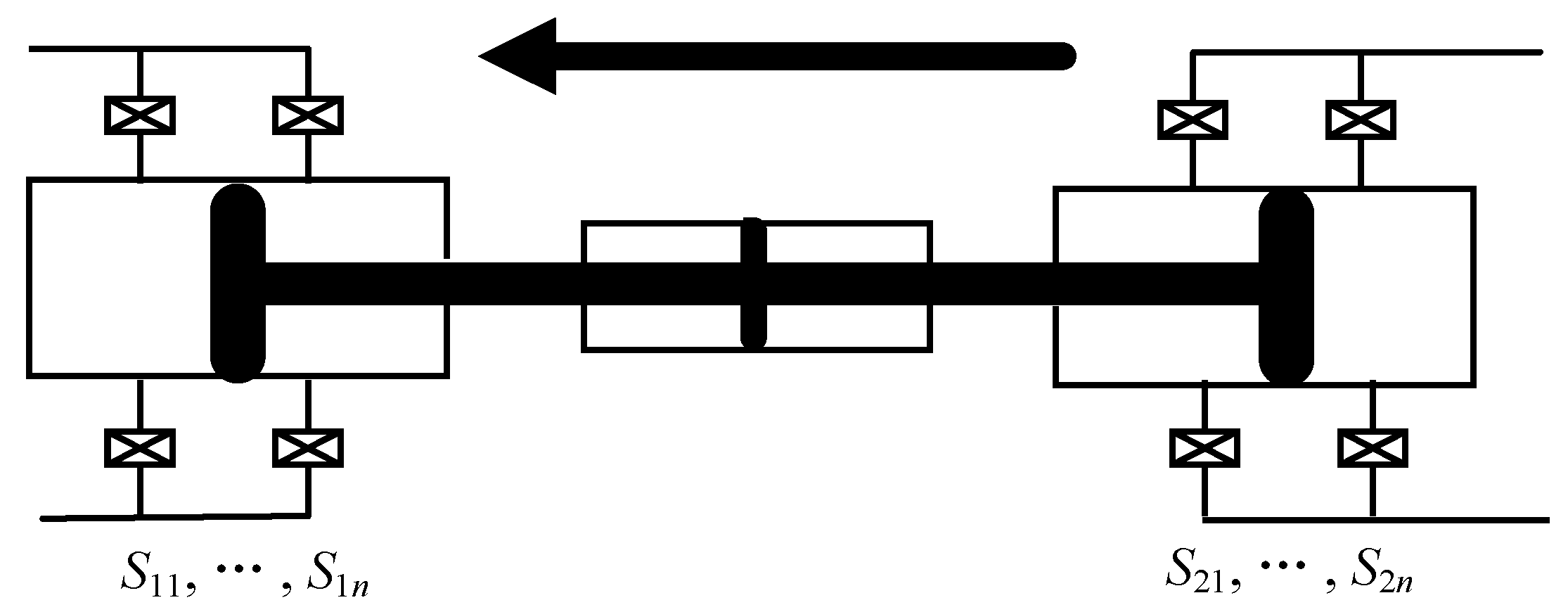
2.1. Principle of AHPET
- (1)
- The equivalent area must be positive and should satisfy the following equation:
- (2)
- Work done by extra forces must help energy transfer rather than impede energy transfer—that is, force exerted on the piston rod must be positive. Output force should satisfy the following equation:
2.2. Design and Area Optimization of Hydraulic Cylinders
3. Application to CAES
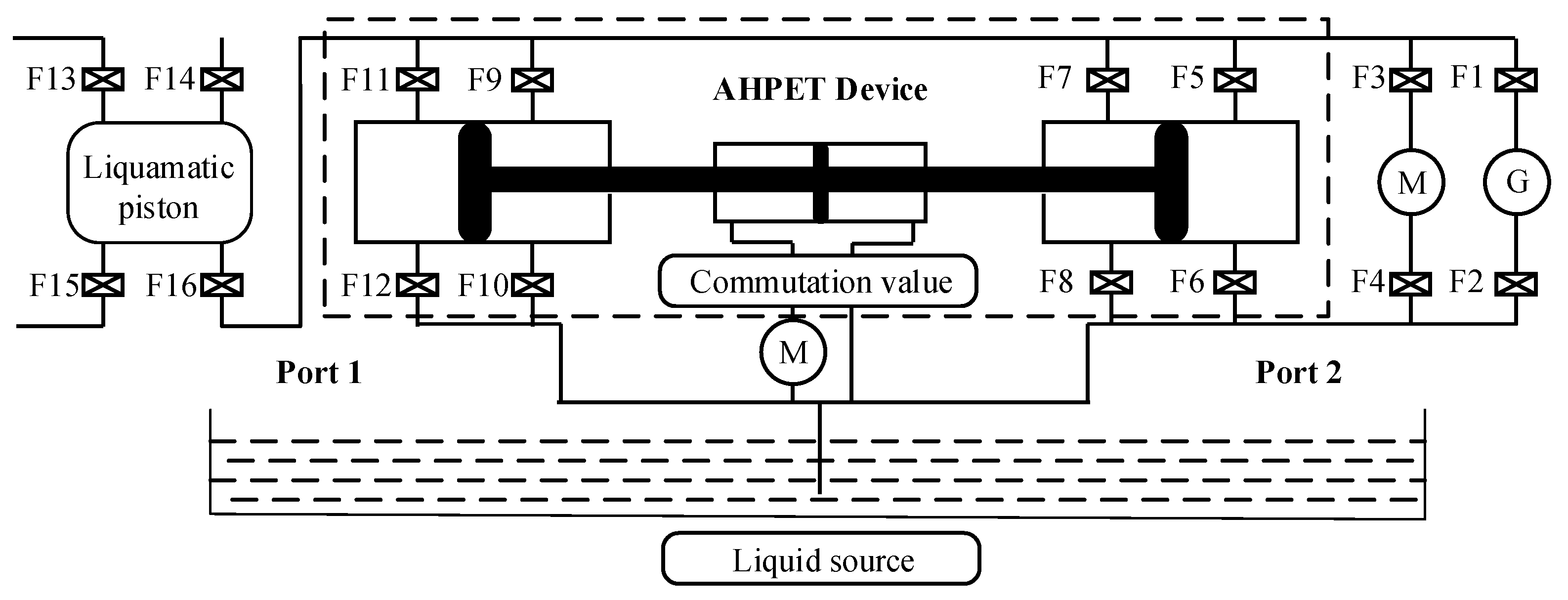
3.1. Structure of the System
3.2. Strategies of Operation
3.3. Mathematical Model of the System
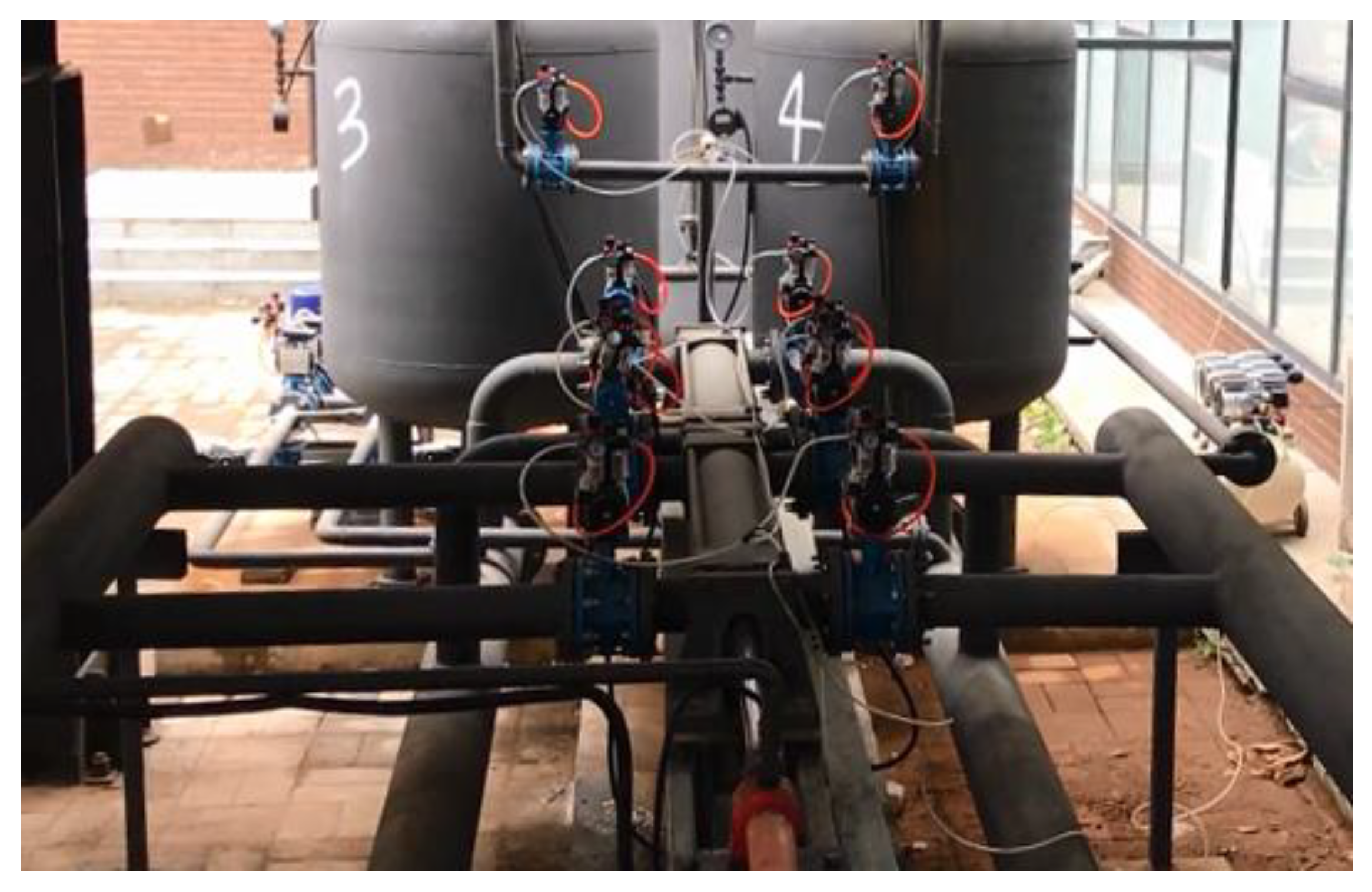
4. Physical Experiment
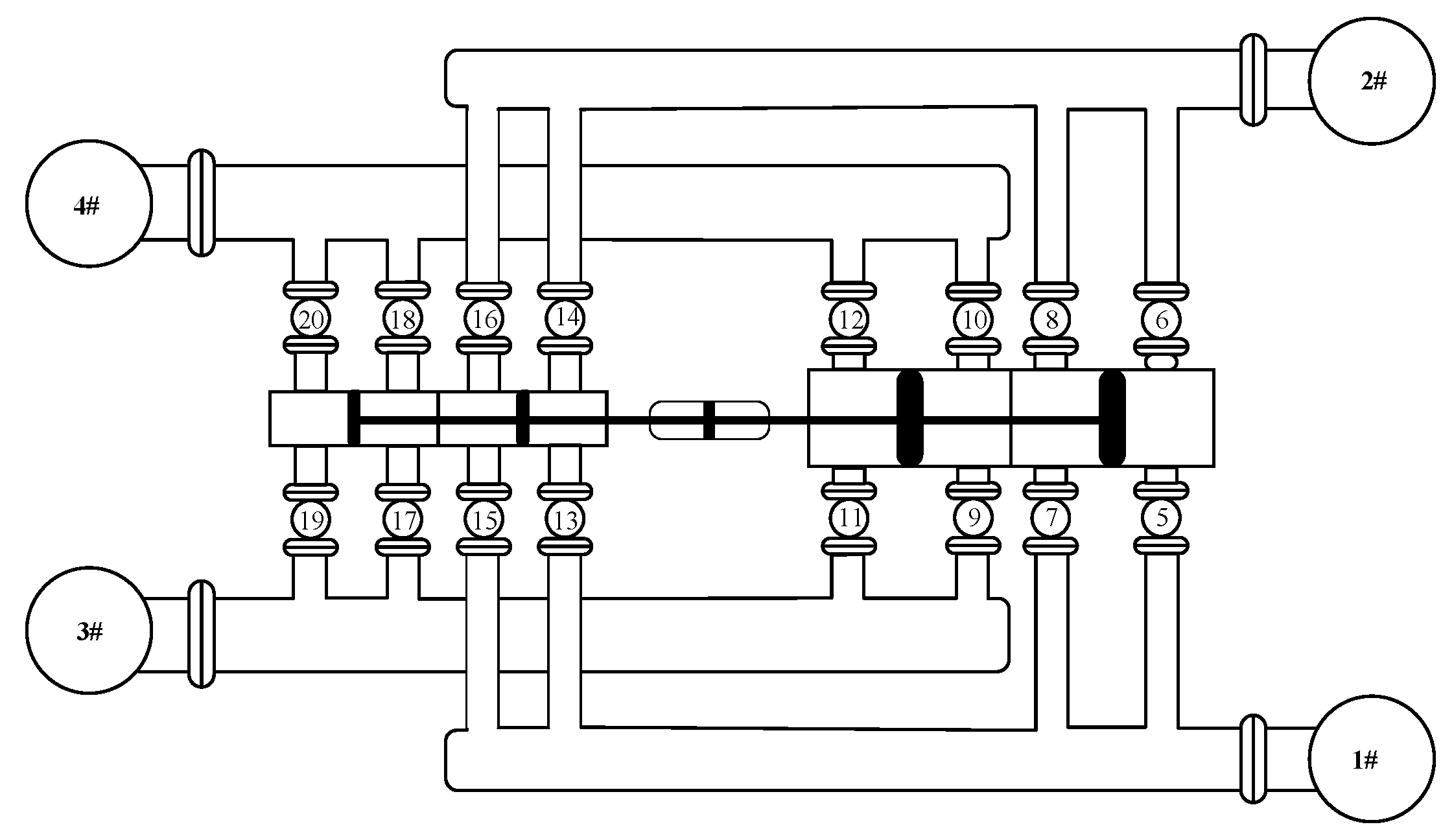
4.1. Design of Device
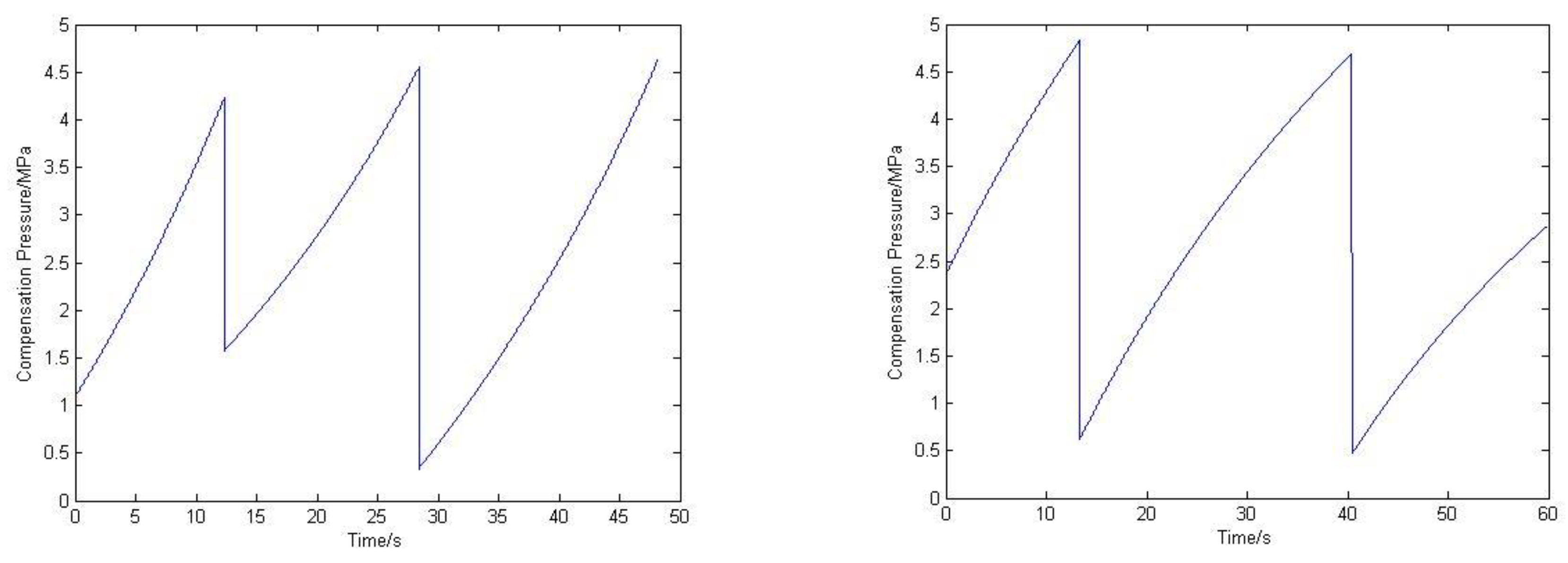
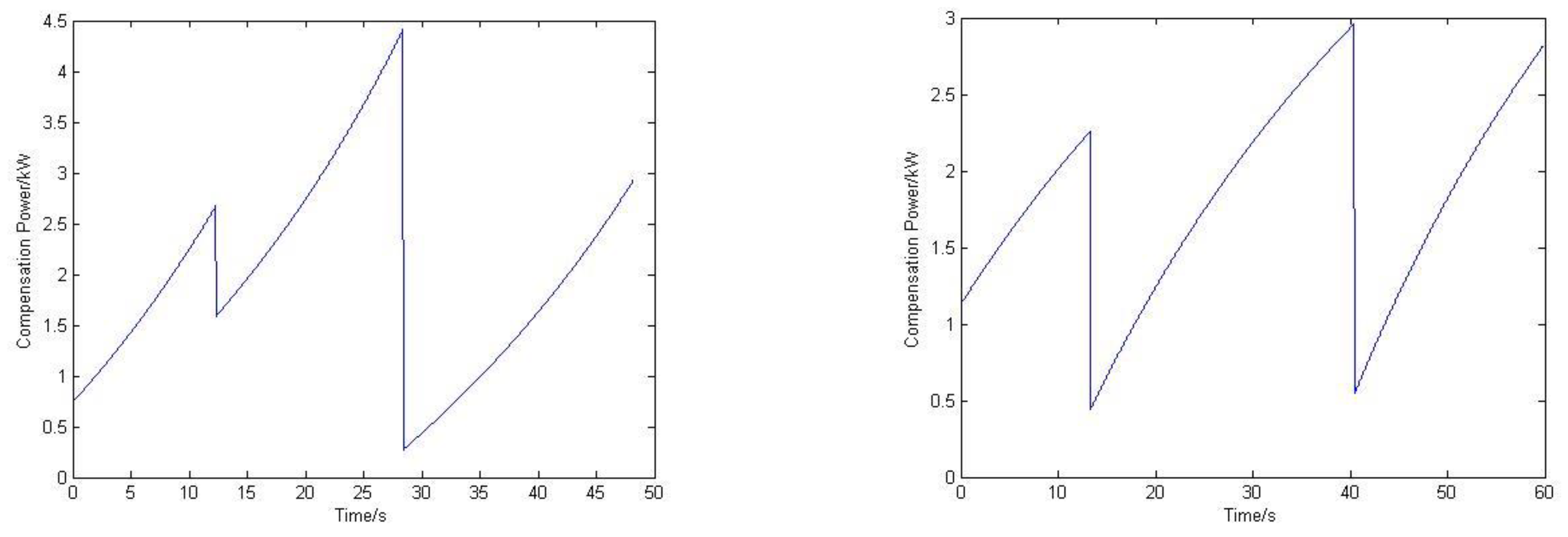
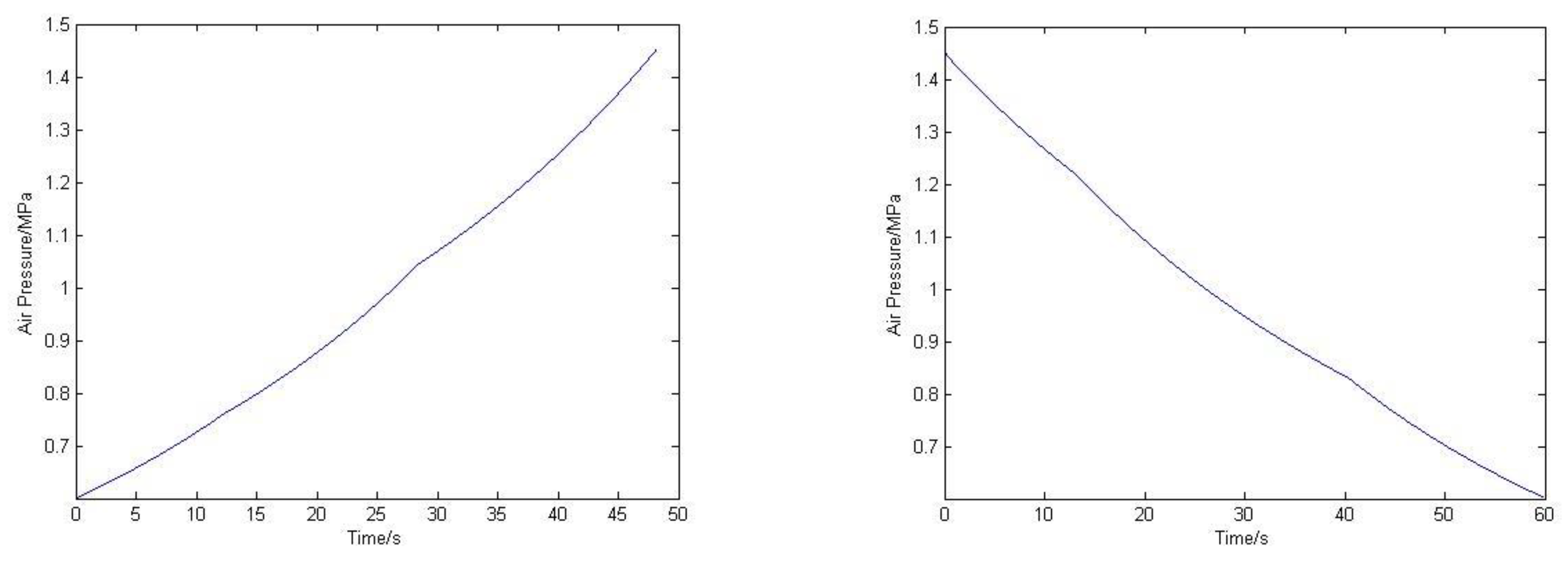
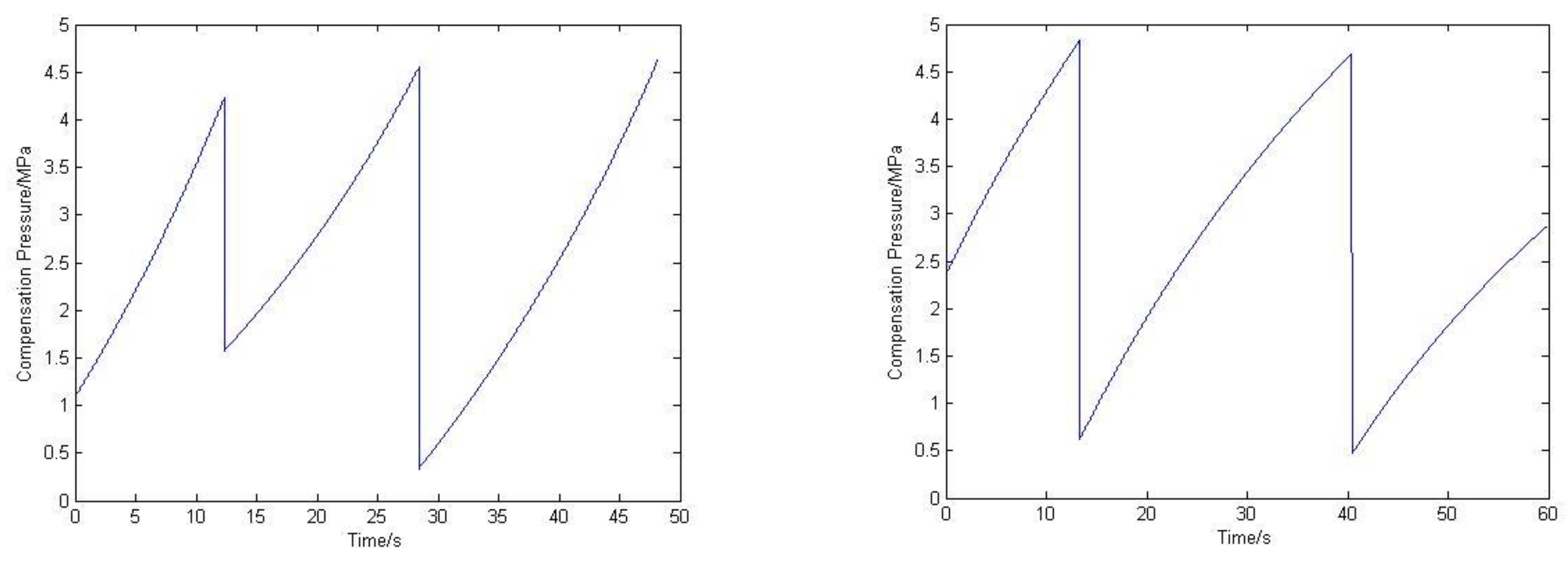
4.2. Simulation of Operation
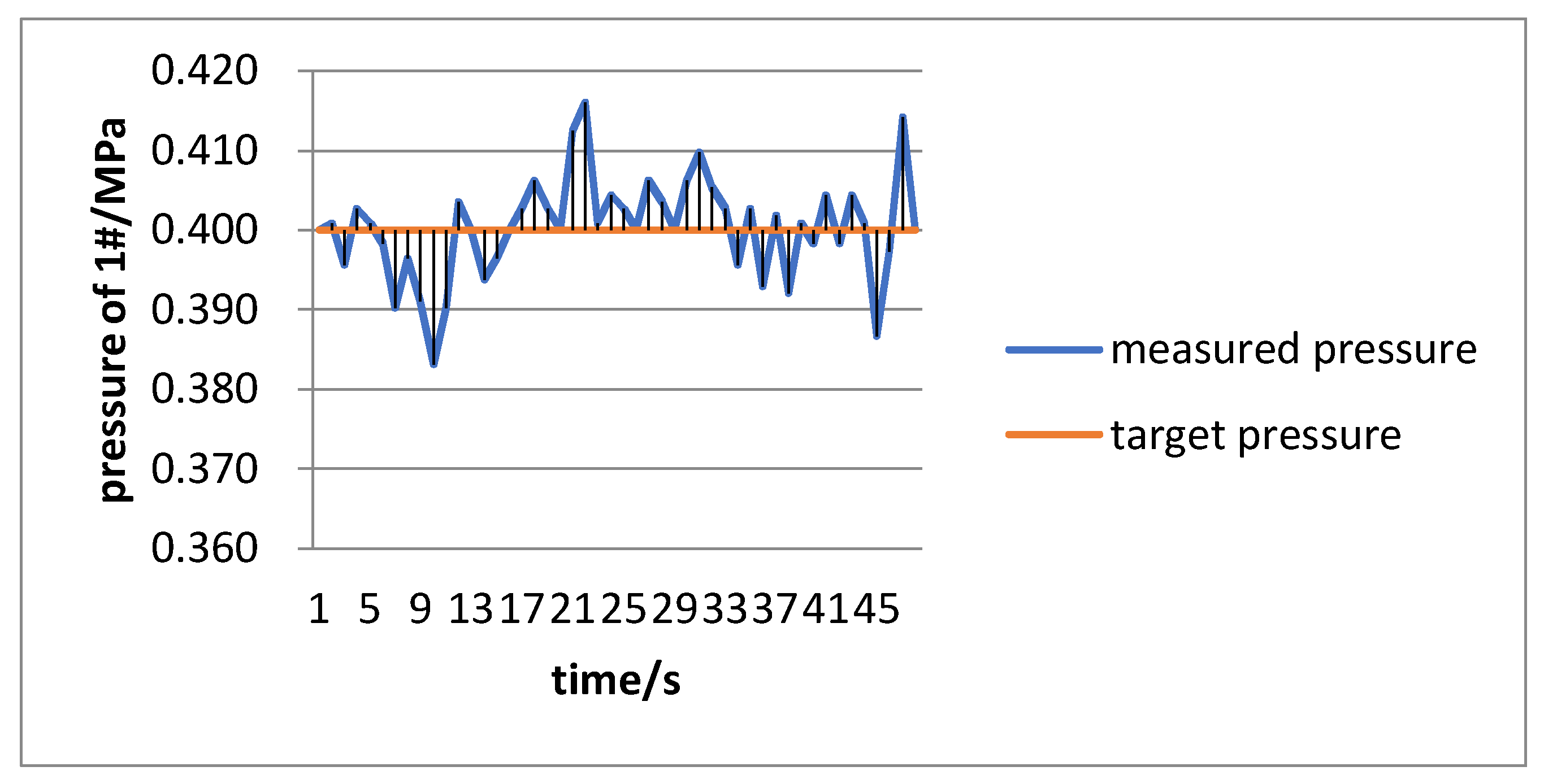
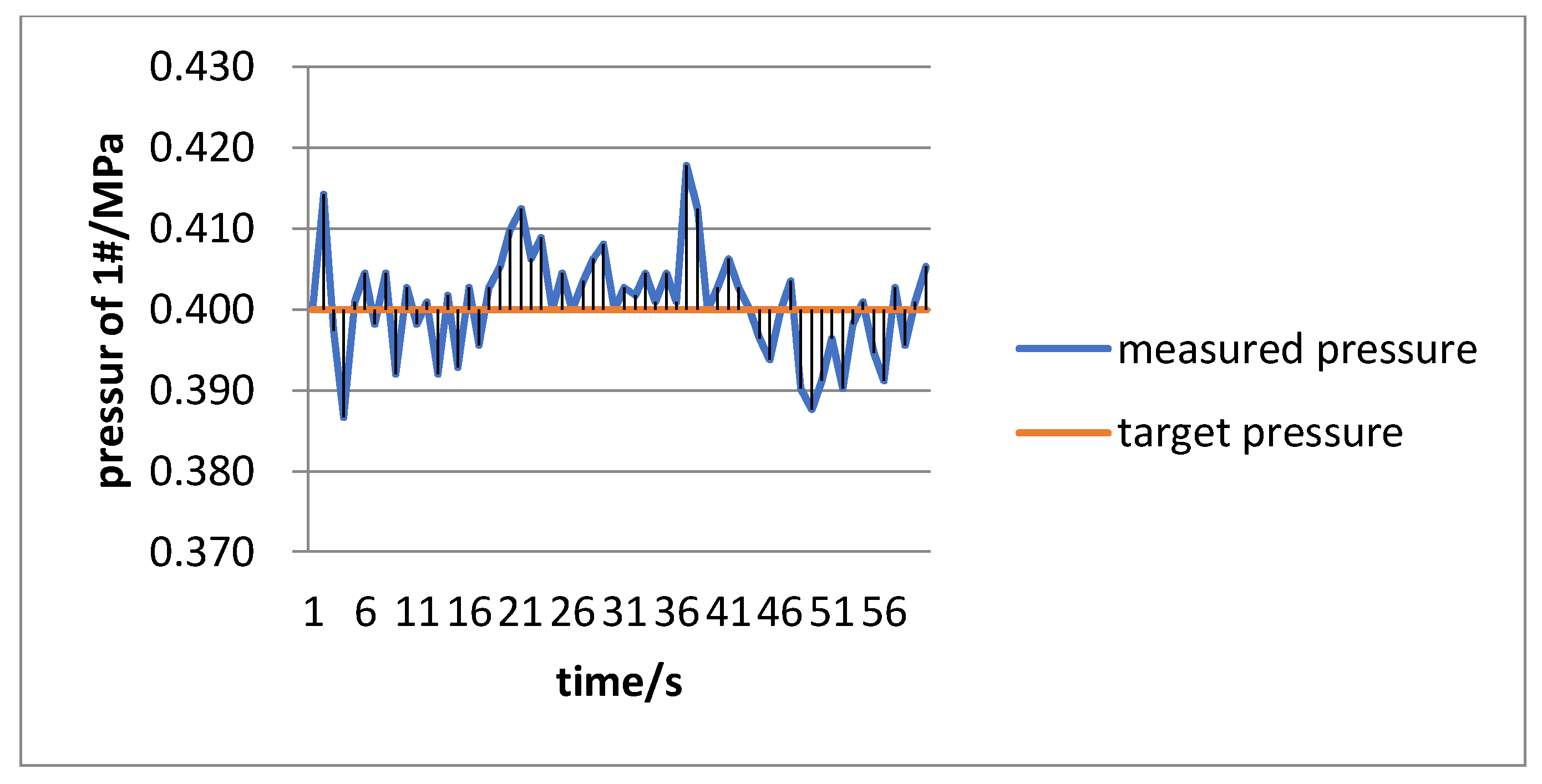
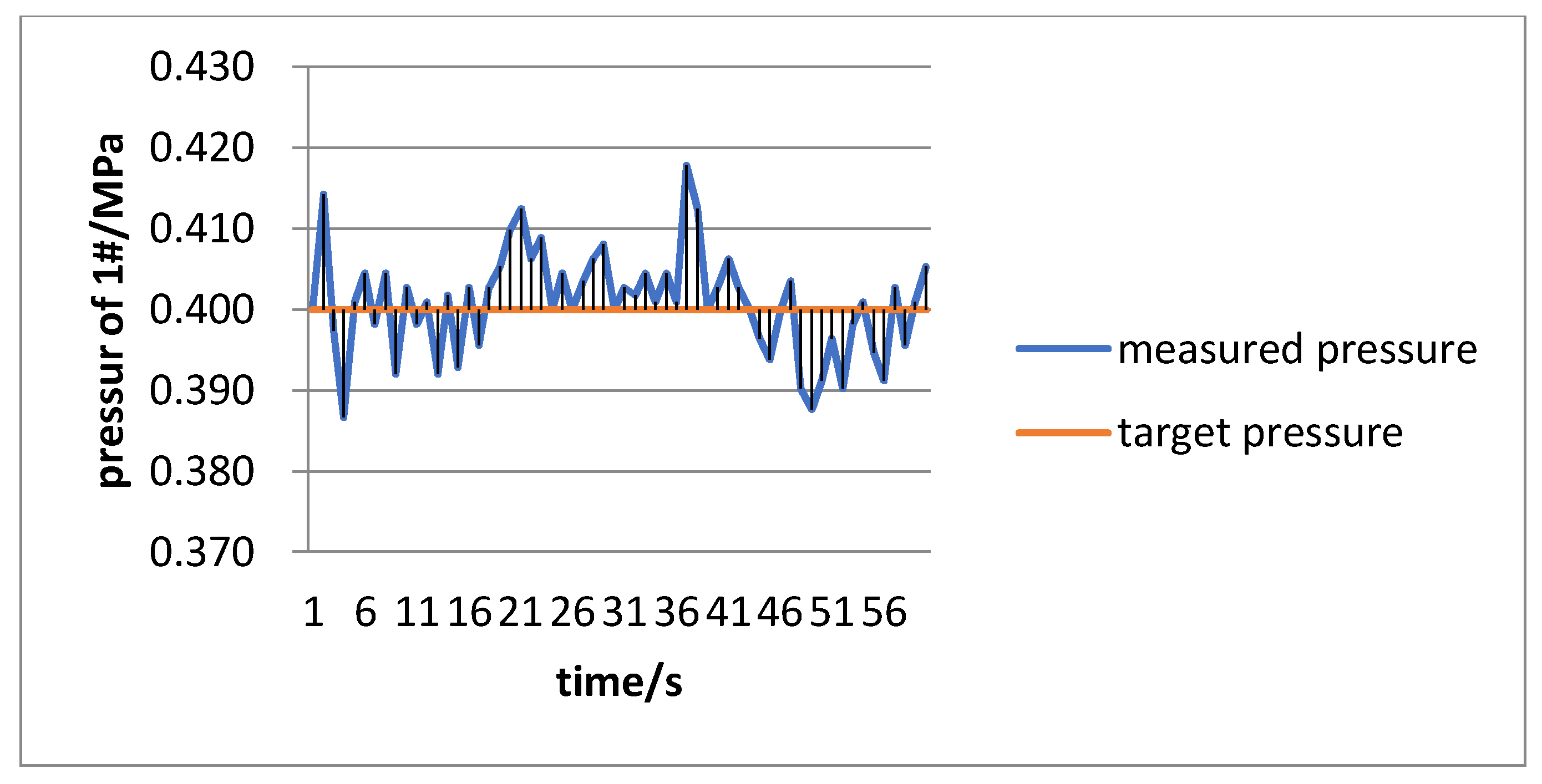
4.3. Results of the Experiment
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Energy Information Administration. International Energy Outlook, 2010; Government Printing Office: Washington, DC, USA, 2010.
- Wang, H.; Wang, L.; Wang, X.; Yao, E.A. Novel Pumped Hydro Combined with Compressed Air Energy Storage System. Energies 2013, 6, 1554–1567. [Google Scholar] [CrossRef]
- De Bosio, F.; Verda, V. Thermoeconomic analysis of a Compressed Air Energy Storage (CAES) system integrated with a wind power plant in the framework of the IPEX Market. Appl. Energy 2015, 152, 173–182. [Google Scholar] [CrossRef]
- Daneshi, A.; Sadrmomtazi, N.; Daneshi, H.; Khederzadeh, M. Wind power integrated with compressed air energy storage. In Proceedings of the 2010 IEEE International Conference on Power and Energy (PECon), Kuala Lumpur, Malaysia, 29 November–1 December 2010; pp. 634–639. [Google Scholar]
- Wang, J.; Lu, K.; Ma, L.; Wang, J.; Dooner, M.; Miao, S.; Li, J.; Wang, D. Overview of Compressed Air Energy Storage and Technology Development. Energies 2017, 10, 991. [Google Scholar] [CrossRef]
- Mei, S.; Gong, M.; Qin, G.; Tian, F.; Xue, X.; Li, R. An advanced adiabatic compressed air energy system based on salt cavern air storage and its application prospects. Power Syst. Technol. 2017, 41, 3392–3399. [Google Scholar]
- Cavallo, A.J. Energy storage technologies for utility scale intermittent renewable energy systems. J. Sol. Energy Eng. 2001, 123, 387–389. [Google Scholar] [CrossRef]
- Linden, S.V. Bulk energy storage potential in the USA, current developments and future prospects. Energy 2006, 31, 3446–3457. [Google Scholar] [CrossRef]
- Rogers, A.; Henderson, A.; Wang, X.; Negnevitsky, M. Compressed air energy storage: Thermodynamic and economic review. In Proceedings of the PES General Meeting | Conference & Exposition IEEE, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Chen, H.; Cong, T.N.; Yang, W.; Tan, C.; Li, Y.; Ding, Y. Progress in electrical energy storage system: A critical review. Prog. Nat. Sci. 2009, 19, 291–321. [Google Scholar] [CrossRef]
- Cheng, S.; Li, G.; Sun, H.; Wen, J. Application and prospect of energy storage in electrical engineering. Power Syst. Clean Energy 2009, 25, 1–8. [Google Scholar]
- Zhang, Y.; Yang, K.; Li, X.; Xu, J. A combined cooling, heating and power (CCHP) system based on advanced adiabatic compressed air energy storage (AA-CAES). J. Eng. Thermophys. 2013, 34, 1991–1996. [Google Scholar]
- Yang, K.; Zhang, Y.; Li, X.; Xu, J. Design and calculation of advanced adiabatic compressed air energy storage systems. J. Eng. Thermophys. 2012, 33, 725–728. [Google Scholar]
- Zhang, Y. Study on System Integration and Simulation of Wind Power and Advanced Adiabatic Compressed Air Energy Storage Technology. Ph.D. Thesis, Institute of Engineering Thermophysics, Chinese Academy of Sciences, Beijing, China, 2014. [Google Scholar]
- Guo, H.; Xu, J.; Chen, H.; Tan, C. System efficiency analysis of a constant-pressure AA-CAES. J. Eng. Therm. Energy Power 2013, 28, 540–546. [Google Scholar]
- Li, X.; Yang, K.; Zhang, Y. Operation level optimization of compression and expansion systems in advanced adiabatic compressed air energy storage systems. J. Eng. Thermophys. 2013, 34, 1649–1653. [Google Scholar]
- Xue, X.; Mei, S.; Lin, Q.; Chen, L.; Chen, Y. A preliminary study on energy internet-oriented non-after-burning compressed air energy storage and its application prospects. Power Syst. Technol. 2016, 40, 164–171. [Google Scholar]
- Ho, T.H.; Ahn, K.K. Modeling and simulation of hydrostatic transmission system with energy regeneration using hydraulic accumulator. J. Mech. Sci. Technol. 2010, 24, 1163–1175. [Google Scholar] [CrossRef]
- Payne, G.S.; Kiprakis, A.E.; Ehsan, M.; Rampen, W.H.S.; Chick, J.P.; Wallace, A.R. Efficiency and dynamic performance of Digital Displacement™ hydraulic transmission in tidal current energy converters. Proceedings of the Institution of Mechanical Engineers, Part A. J. Power Energy 2007, 221, 207–218. [Google Scholar] [CrossRef]
- Dickinson, B.W.O., III; Dickinson, R.W.; Hutchison, S.O. Hydraulic Piston-Effect Method and Apparatus for Forming a Bore Hole. U.S. Patent US4527639, 9 July 1985. [Google Scholar]
- Bi, J.; Jiang, T.; Chen, W.; Ma, X. Research on storage capacity of compressed air pumped hydro energy storage equipment. Energy Power Eng. 2013, 5, 26–30. [Google Scholar] [CrossRef]
- Muller, S. General compression moves ahead with unique energy storage technology. Power Daily 2010, 8, 1. [Google Scholar]
- Duan, X.; Li, S.; Wu, Y.; Li, L. Application of advanced adiabatic compressed air energy storage in microgrids. Electr. Power Sci. Eng. 2015, 31, 48–54. [Google Scholar]
- Fu, H.; Zhang, Y.; Cui, Y.; Zhang, L.; Jiang, T. Research development of compressed air energy storage systems. Sci. Technol. Rev. 2016, 34, 81–87. [Google Scholar]
- Ekman, C.K.; Jensen, S.H. Prospects for large scale electricity storage in Denmark. Energy Conv. Manag. 2010, 51, 1140–1147. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equivalent Area | Open Valves | Closed Valves |
|---|---|---|
| S1 | F2, F3, F6,F8 | F1, F4, F5, F7 |
| S2 − S1 | F1, F4, F6, F7 | F2, F3, F5, F8 |
| S2 | F2, F4, F6, F7 | F1, F3, F5, F8 |
| S1 + S2 | F2, F3, F6, F7 | F1, F4, F5, F8 |
| Volume of Air in Liquamatic Piston/m3 | Pressure of Air in Liquamatic Piston/MPa | Water Head of High-Pressure Pool/MPa | Maximum Compensation Pressure/MPa | Friction/N | Constant Power of Water Pump/kW |
|---|---|---|---|---|---|
| 0.3–0.8 | 0.6–1.6 | 0.4 | 5 | 2272.62 | 7.5 |
| Schemes of Equivalent Area | Equivalent Area on Variable Pressure Side | Equivalent Area on Constant Pressure Side | Pressure of Air in Liquamatic Piston/MPa | Volume of Air in Liquamatic Piston/m3 | Velocity of Piston Rod/m/s | Operation Time/s |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 0.60–0.76 | 0.80–0.65 | 0.40 | 12.35 |
| 2 | 1 | 2 | 0.76–1.04 | 0.65–0.49 | 0.62 | 16.06 |
| 3 | 1 | 3 | 1.04–1.45 | 0.49–0.36 | 0.40 | 19.76 |
| Schemes of Equivalent Area | Equivalent Area on Variable Pressure Side | Equivalent Area on Constant Pressure Side | Pressure of Air in Liquamatic Piston/MPa | Volume of Air in Liquamatic Piston/m3 | Velocity of Piston Rod/m/s | Operation Time/s |
|---|---|---|---|---|---|---|
| 1 | 1 | 4 | 1.45–1.22 | 0.36–0.43 | 0.40 | 12.35 |
| 2 | 1 | 3 | 1.22–0.83 | 0.43–0.60 | 0.62 | 16.06 |
| 3 | 1 | 2 | 0.83–0.6 | 0.60–0.80 | 0.40 | 19.76 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, H.; Jiang, T.; Cui, Y.; Li, B. Adaptive Hydraulic Potential Energy Transfer Technology and Its Application to Compressed Air Energy Storage. Energies 2018, 11, 1845. https://doi.org/10.3390/en11071845
Fu H, Jiang T, Cui Y, Li B. Adaptive Hydraulic Potential Energy Transfer Technology and Its Application to Compressed Air Energy Storage. Energies. 2018; 11(7):1845. https://doi.org/10.3390/en11071845
Chicago/Turabian StyleFu, Hao, Tong Jiang, Yan Cui, and Bin Li. 2018. "Adaptive Hydraulic Potential Energy Transfer Technology and Its Application to Compressed Air Energy Storage" Energies 11, no. 7: 1845. https://doi.org/10.3390/en11071845
APA StyleFu, H., Jiang, T., Cui, Y., & Li, B. (2018). Adaptive Hydraulic Potential Energy Transfer Technology and Its Application to Compressed Air Energy Storage. Energies, 11(7), 1845. https://doi.org/10.3390/en11071845