1. Introduction
The World Wind Energy Association (WWEA) suggests that the worldwide wind capacity will reach 800 GW by the end of 2021. The Global Wind Energy Council (GWEC) predicted that the wind industry in coming years will continue to grow as the technology is improving. The use of the latest technology helps to reduce the Cost of Energy (COE). The operation and maintenance (O&M) cost represents a substantial part of the total annual costs of a wind turbine and compared to onshore, O&M is even higher in offshore wind turbines. A UK industry report [
1] concluded that the O&M costs make up 20–25% of the total lifetime costs of an offshore wind farm. Also, unexpected failures and machine unavailability increase the O&M costs and subsequently COE which makes offshore turbines a less profitable business. Furthermore, it is expected that the global O&M market will reach 20.6 billion US dollars by 2023 [
2]. Therefore, the use of novel approaches that reduce the O&M is important, and these briefly reviewed below.
Condition monitoring (CM) techniques are used to monitor the performance of wind turbines in order to identify abnormal behavior which is indicative of a developing fault [
3]. With the help of an effective CM approach, failure can be detected earlier, and catastrophic stages can be prevented [
4,
5]. The CM can be corrective or preventive and unscheduled. Corrective CM is also known as unplanned maintenance and is carried out when shortcomings are identified in the internal components of wind turbines. The unexpected failures make unscheduled maintenance the most expensive condition monitoring technique. Wind farm equipped with a SCADA system records valuable information about the turbine operations without any extra cost at different time intervals, and thus SCADA-based condition monitoring is a cost-effective approach [
6,
7]. Systematic analysis of SCADA data can be useful in identifying the difference between normal and abnormal conditions in relationships among various parameters. Several techniques incorporated SCADA data for improving the wind turbine performance and these are described as follows.
There are several machine learning methods used for wind turbine condition monitoring, and these are broadly classified into parametric and nonparametric methods, see for example [
8,
9,
10]. The parametric models are based on mathematical equations and are generally less accurate than nonparametric models. For example, the authors of [
11] carried out a comparative study of several models, and it was found that the parametric model does not correctly replicate the dynamic behavior of actual wind turbines. However, nonparametric models are a data-driven approach and do not impose any pre-specified condition, unlike the parametric approach which is often built by the generation of functions with some parameters. Thus, the nonparametric model reflects the closest relationship between output and input data. For example, the authors of [
11] studied parametric and nonparametric methods used for wind turbine power curve modeling, and comparative studies show that nonparametric models give a better result than parametric models. The commonly used nonparametric techniques used in wind turbine condition monitoring are fuzzy logic, artificial neural networks, kNN, random forest, support vector machine and so on [
12,
13,
14,
15].
Several studies suggest that continuous monitoring of a wind turbine can be useful in improving the performance and minimizing the O&M cost. The wind turbine operations are affected by external (e.g., Turbulence, icing) and internal factors (e.g., temperature, lubrication). The events related to internal factors can be analyzed, while for external factors, this is not possible since they cannot be controlled. These internal factors are helpful in a performance evaluation of a wind turbine. The internal operation of the wind turbines that affect the power production depends on critical variables, in particular, rotor power, blade pitch angle and torque, and continuous monitoring of these parameters improves the overall effectiveness of the model to assess turbine performance [
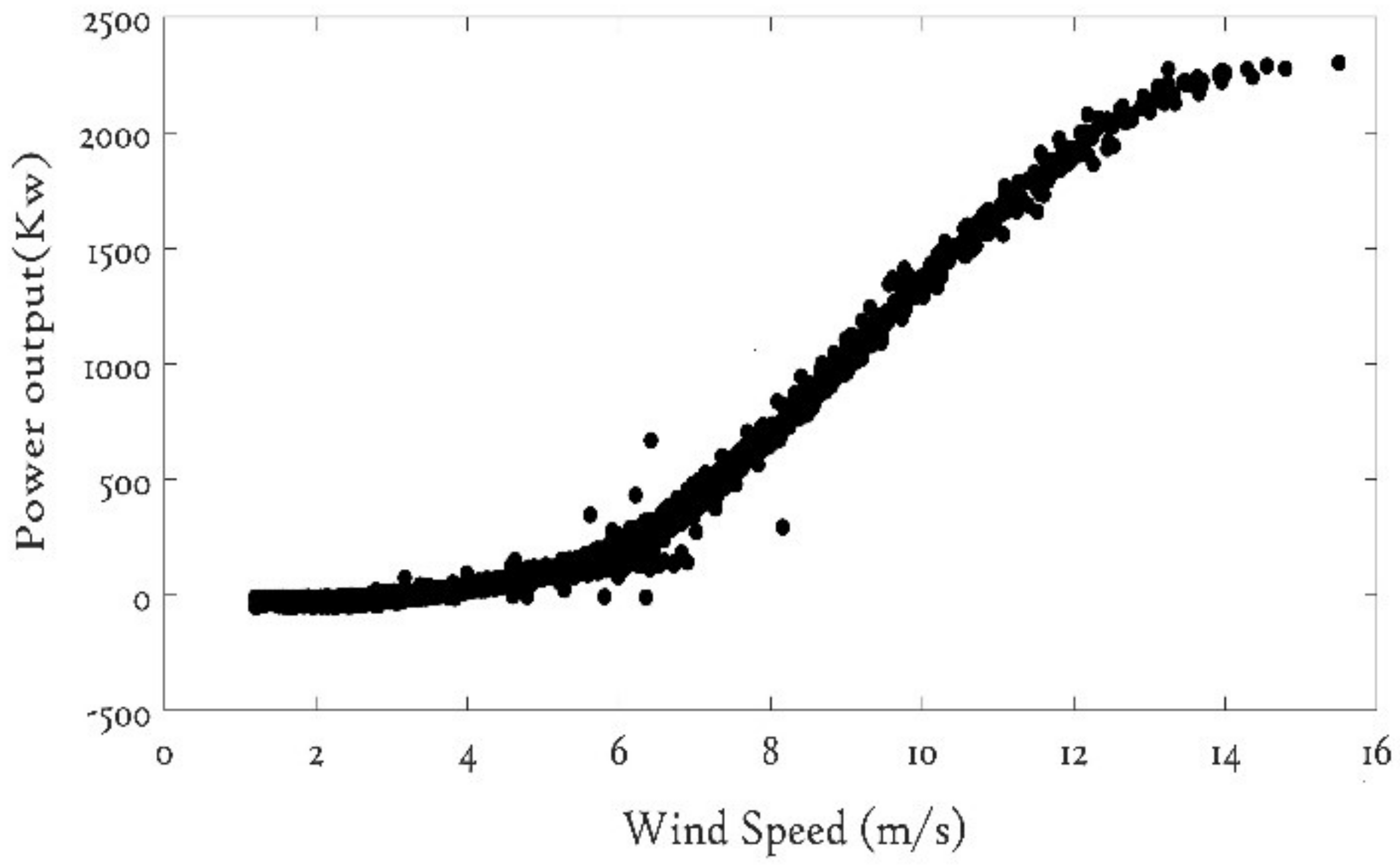
16]. The power curve, blade pitch curve, and rotor curves facilitate the importance of these parameters and are thus helpful in building robust condition monitoring approach for wind turbines.
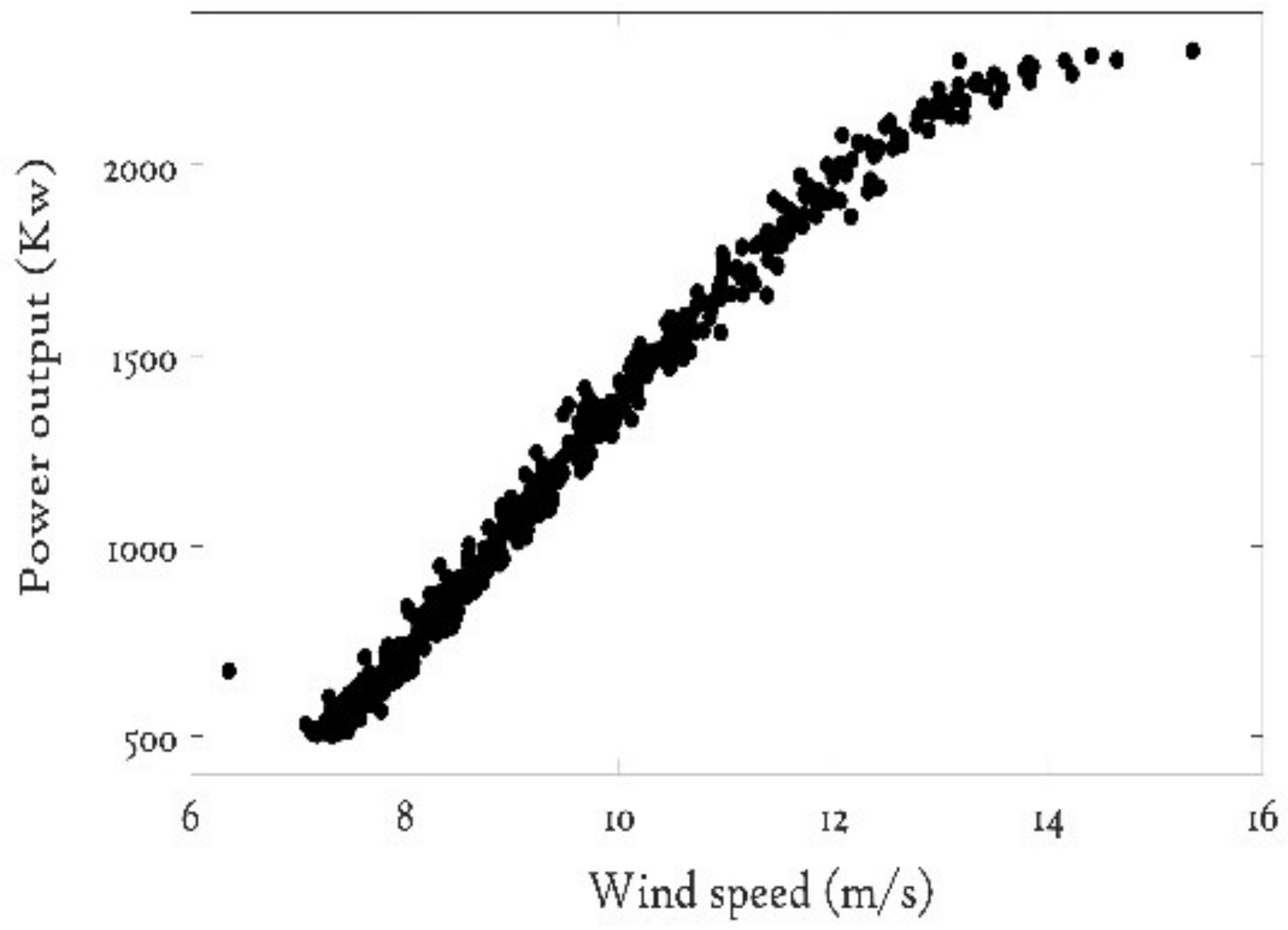
A widely used relationship is that between power output and hub height wind speed and is called a power curve and is widely used for power performance assessment purposes. IEC 61400-12-1 [
17] have guidelines, popularly used in academia and wind industries for accurate measurement of power curves where a data reduction technique called ‘binning’ is used. In ‘binning’, data split up into sets of non-overlapping wind speed regions where wind speed is binned into 0.5 m/s wide wind speed intervals, and then mean and standard deviation values of power and wind speed are calculated for each bin. However, the binning method is not perfect because it is slow to respond, and the standard bin width of 0.5 m/s reduces binned power curve accuracy because within each bin, the measured power will depend strongly and non-linearly on wind speed. Moreover, a large bin would result in a systematic bias, and sufficient data points are needed in each bin to be statistically significant [
17,
18]. Thus, many papers use a nonparametric model as an alternative approach for power curve modeling, see for example [
11,
12,
18]. The copula model is proposed in ref. [
19] to estimate bivariate probability distribution functions representing the power curve of existing turbines. Furthermore, the cubic spline interpolation [
20] has been applied for accurate power curve modeling. A compressive review of power curve modeling based on SCADA data and machine learning approach can be found in [
9,
11].
In wind industries, the power curve is widely used to assess the performance but it is not a perfect indicator because various failures and downtime events may not be detected by the power curve. Hence, it is desirable to explore other curves that are based on critical parameters that affect the power production of a wind turbine. For example, in Ref. [
21], the author demonstrated the relationship between pitch angle and power output where a three-bladed up-wind variable speed wind turbine with a double feed asynchronous generator was used. The power coefficient is a function of the pitch angle, and thus the blade pitch angle affects the power production of the wind turbine. For example, [
22], using Blade Element Momentum Theory (BEMT), a technique constructed to study the parameter that affects the power curve of a blade wind turbine, the result confirmed that the blade pitch angle (or power coefficient) has a direct impact on the power performance of a wind turbine. In another paper [
23], the effect of the blade pitch angle on the power performance of a horizontal axis wind turbine (HAWT) was discussed. Furthermore, in Ref. [
24], with the help of a two-dimensional singularity method, the aerodynamic performances of a wind turbine airfoil in sinusoidal pitching motion were numerically estimated and analyzed. The results suggest that aerodynamic performances of the airfoil and the shedding wake were affected due to the sudden change effect in pitch angle. The author of [
25] developed a pitch angle control algorithm based on fuzzy logic for adjusting the aerodynamic torque when wind speed is above the rated value. This proposed fuzzy logic model was then compared with conventional pitch angle control strategies and suggests that the fuzzy logic controller can achieve better control performances than traditional pitch angle control strategies, namely, lower fatigue loads, lower power peak and lower torque peak. The result of [
26] advocates that in a wide range of tip speed ratios (TSRs), the optimized blade pitches can increase the average power coefficients of 0.177 and 0.317 in two simulated VAWT models with different chord lengths. The nonlinear relationship between pitch angle and wind speed, called the blade pitch curve, is useful for wind turbine condition monitoring. For example, Singh [
27] considered underperformance due to the misaligned wind vane as a case study. Power curve and blade pitch angle were developed to detect the performance change due to the misaligned vane, and the result suggests that the blade pitch curve can detect the performance change while it is unidentified by the power curve. Thus, the use of pitch curve monitoring can be beneficial in identifying abnormal behavior due to failures (e.g., pitch failures). For example, the authors of [
28] used five data-mining methods, namely, bagging, neural network, PART, kNN and genetic programming, to monitor the performance of a blade pitch. The comparative studies of these models conclude that genetic programming algorithm prediction accuracy is best among the other developed models. A compressive analysis of the blade pitch angle and its impact on turbine performance can be found in [
29,
30,
31,
32].
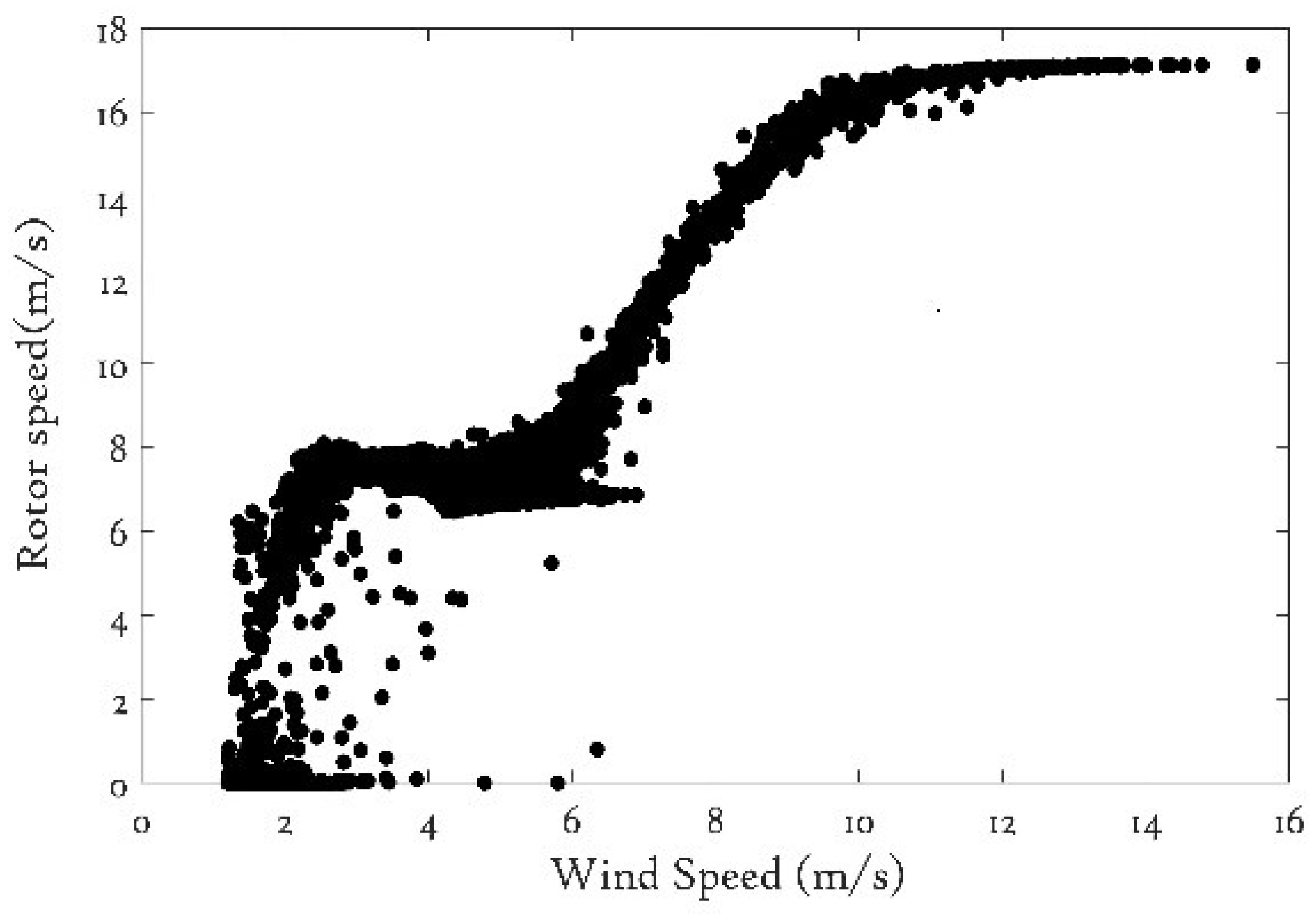
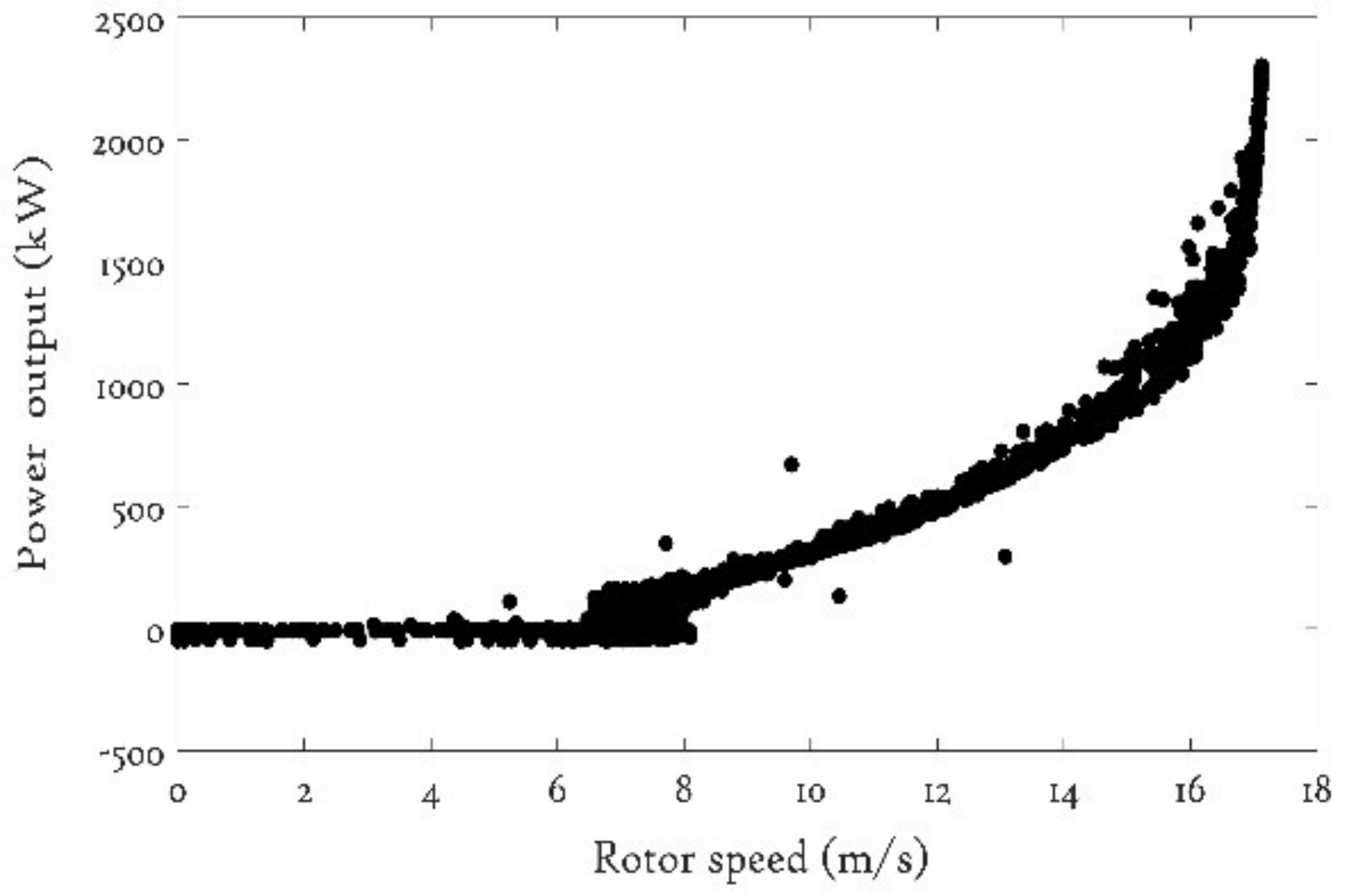
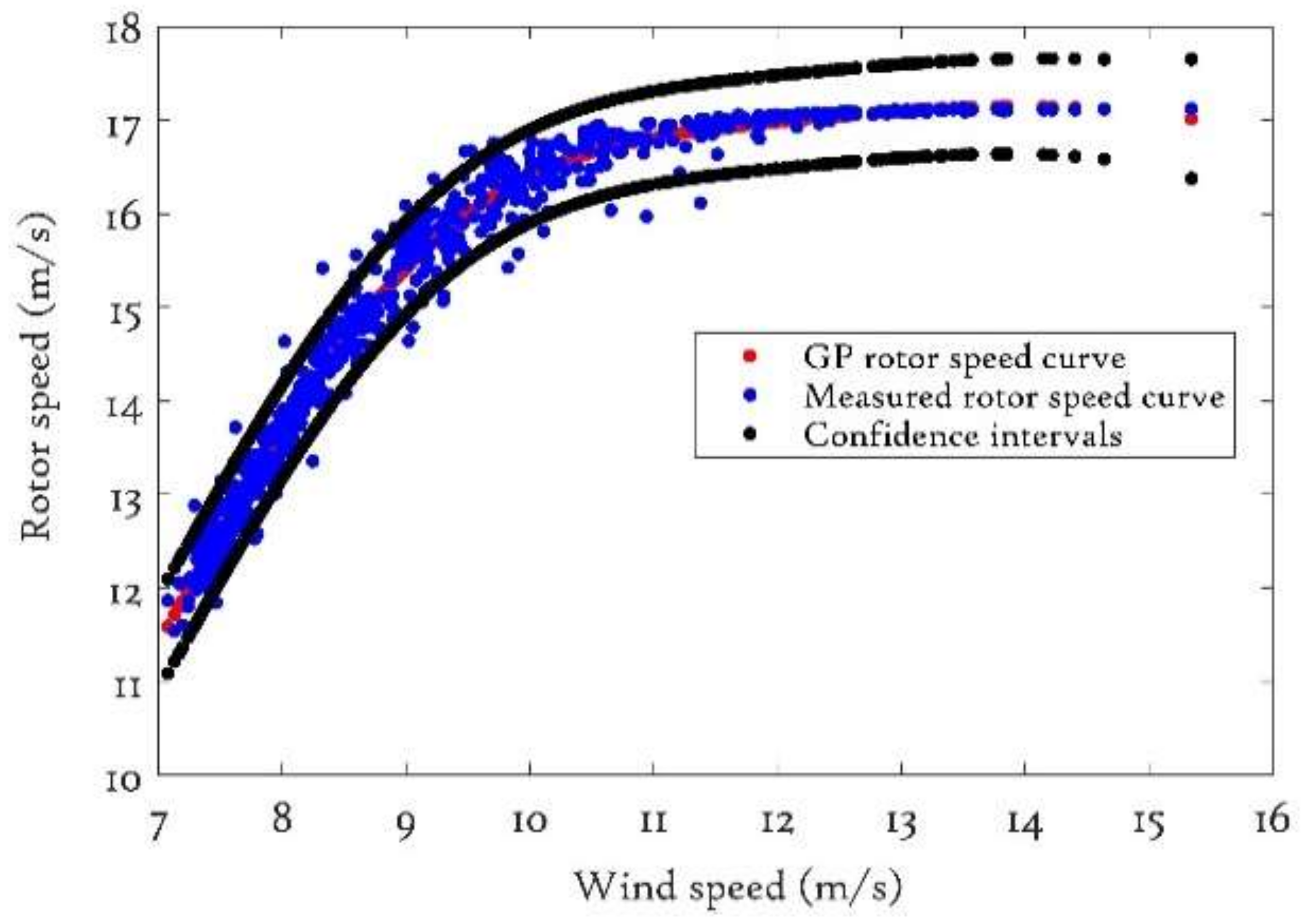
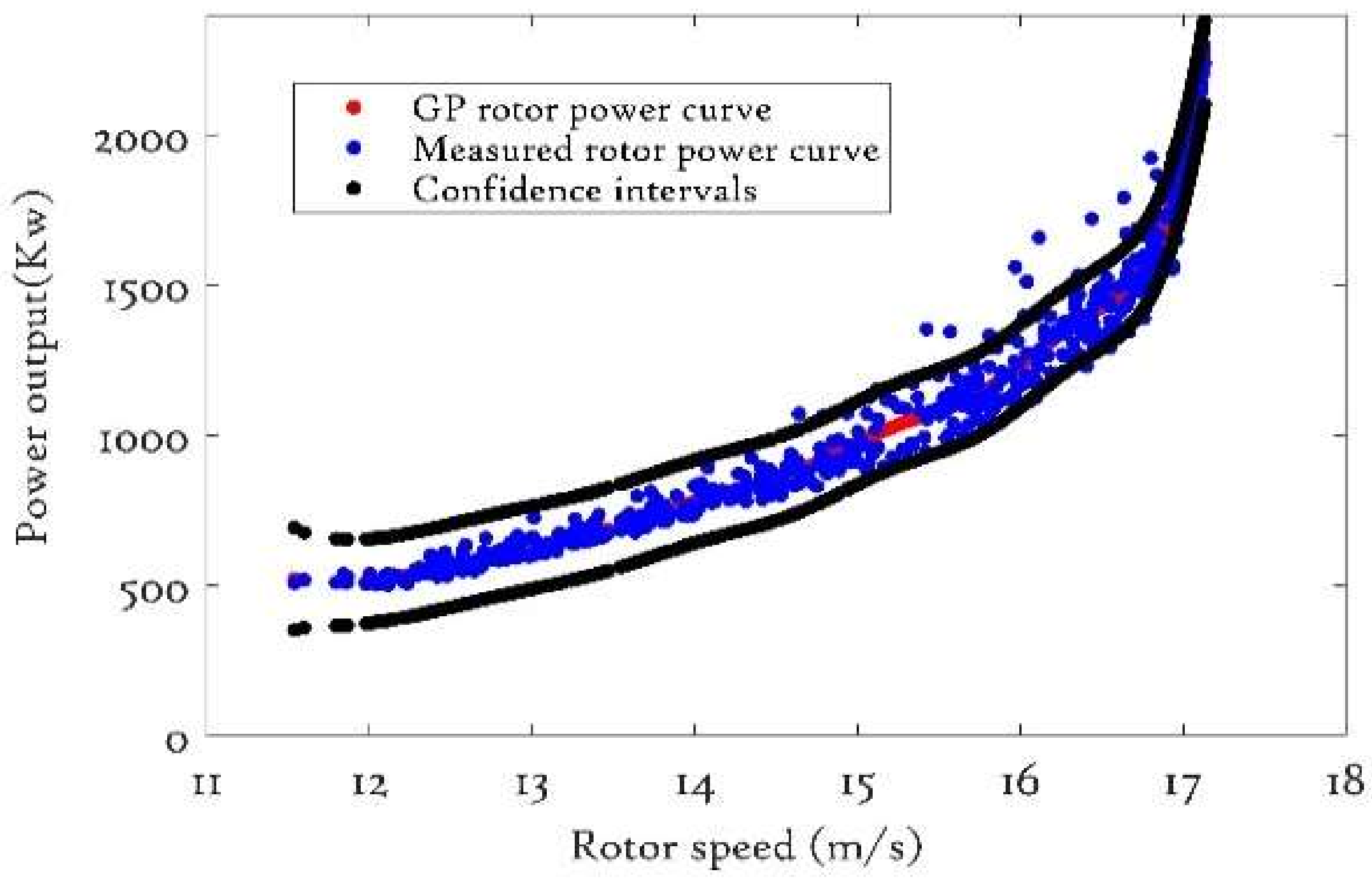
Rotor speed in another key performance indicator that affects the performance of a wind turbine, and rotor curves depicts its importance. The rotor curves are useful for identifying the failures associated with wind turbines and there are two types. The rotor speed curve describes the nonlinear relationship between rotor speed and wind speed and is a monotonically increasing function of the wind speed, and failures of turbines change its shape [
33], while the rotor power curve signifies the nonlinear relationship between rotor speed and power output of a wind turbine and is vital for power performance assessments. It should be noted that at optimal rotor speed, the power production of wind turbines is maximized. The authors of [
33] constructed a reference rotor speed curve on which the multivariate outlier detection approach was based, using k-means clustering and the Mahalanobis distance. Using this curve, the underperformance of a wind turbine was identified using calculated kurtosis and skewness values. Moreover, Singh [
27] outlines the importance of rotor power curve in his thesis. Singh constructed a power curve and rotor power curve to detect abnormal behavior of turbines, and comparative studies found that the rotor power curve detected performance changes due to down events but remained undetected by its corresponding power curve. The authors of [
34] studied lookup tables of power-speed curves used to achieve the maximum power point tracking (MPPT), though to do so requires significant memory space.
The Gaussian Process (GP) is powerful nonparametric, data-driven approach and is a collection of random variables, any finite number of which have a joint Gaussian distribution [
35]. In GP models, covariance function or kernel is used to describe the similarity between two points [
35]. In the past, GP models were applied in wind power forecasting [
36], solar power [
37], electricity pricing [
38] and residential probabilistic load forecasting [
14]. Rasmussen and Williams [
35] provided a brief mathematical explanation of the GP models and their implementation. Gaussian Process models were recently applied to solve wind energy problems. For example, in Ref. [
39], GP and extreme value distributions were used for the performance monitoring of wind turbines in which power curves from an actual wind turbine are assessed as whole functions and not individual data points, and their accuracy was better than a conventional pointwise method. The constructed GP models are superior with regards to identifying failures and significantly lowering the number of false-positives without compromising the effectiveness of the approach. In another Ref. [
40], GP models were used to calculate the optimum coordinated control actions of the wind turbines to maximize wind farm power production. Despite promising results, GP model application for wind turbine condition monitoring is limited.
Unscheduled maintenance resulting from unexpected failures causes underperformance, machine inaccessibility, and high O&M costs. Many nonparametric models have been published, mostly confined to power curve based condition monitoring. However, turbine performance cannot be judged solely on power since various additional parameters also have significant influences. With the help of these variables, nonparametric models can be constructed which may be useful in identifying faults and thus improving wind turbine condition monitoring. This paper aims to explore their potential.
As already described above, many papers have used the wind turbine power curve to identify abnormal turbine states. However, many failures associated with underperformance and downtime remain undetected by power curve analysis, see [
27]. Therefore, there is a need to develop other reference curves based on key performance parameters of the wind turbine, namely, the pitch angle and rotor speed. In this paper, a SCADA-based Gaussian Process model based on these key variables is presented. The blade pitch angle, rotor speed, and rotor power were used to construct the GP reference models which can be used to identify underperformance which may remain undetected using the power curve alone, as suggested by Ref. [
27]. The references based on these parameters are the rotor curve and blade pitch angle curves. The power curve is used alongside the rotor speed curve and blade pitch angle curves; together they are referred to as the operational curves. Using GP operational curves, a qualitative understanding of turbine health can be used to detect faults at an early stage. Furthermore, the operational curves can be a used as performance indicators to measure the impact of internal factors. Moreover, GP operational curves can be used as a reference model to identify the wind turbine major failures. Uncertainty and the distribution function associated with GP operational curves will be discussed in greater detail below.
The outline of this paper is as follows:
Section 1 is the introduction.
Section 2 describes the wind turbine performance curves: power curve, blade pitch curve, and rotor curve.
Section 3 presents actual operational data sets of a wind farm in Scotland and describes its pre-processing for constructing operational curves of a wind turbine.
Section 4 proposes a Gaussian Process model for building operational curves, including hyper-parameter optimization, and
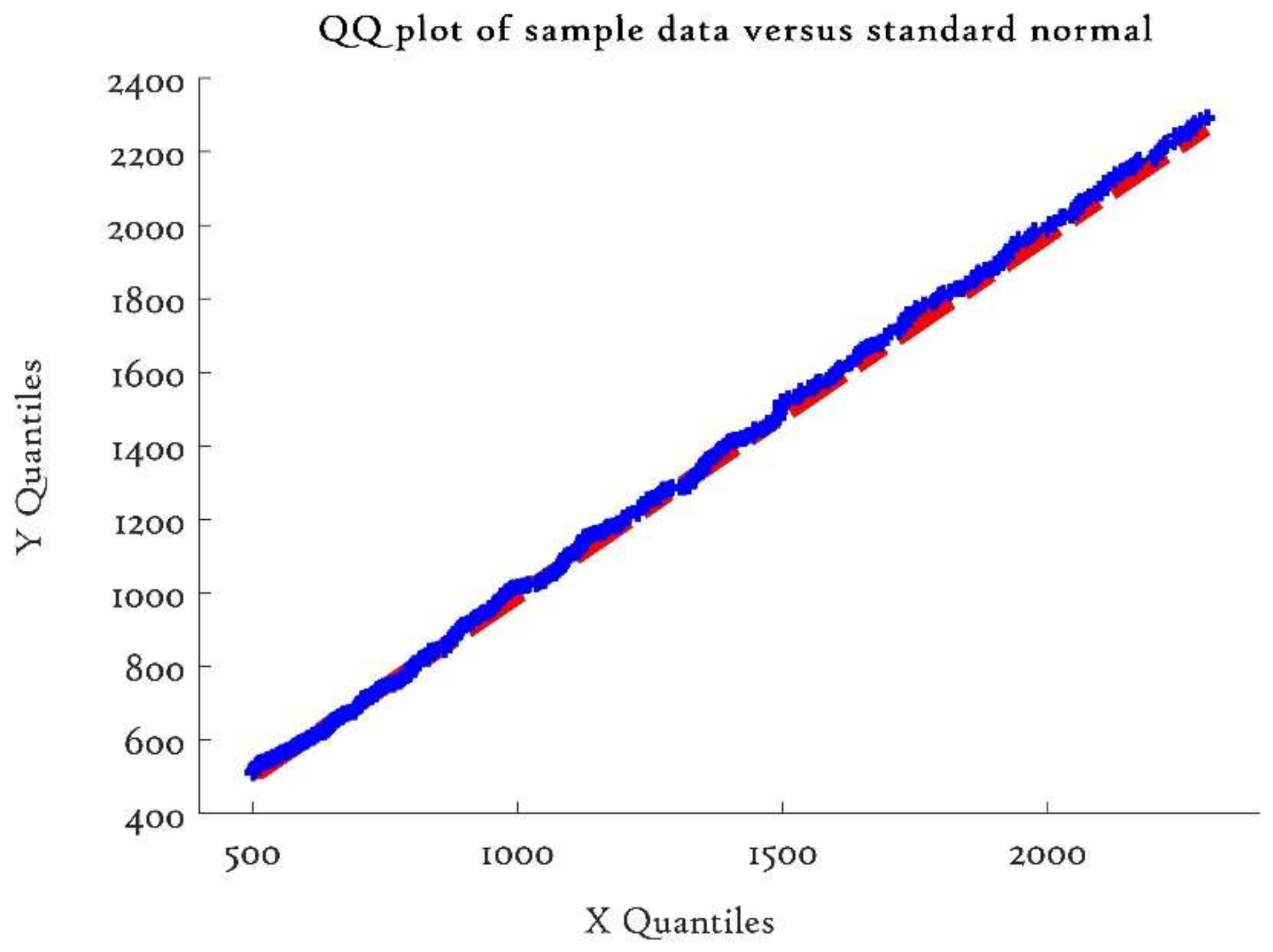
Section 5 presents the comparative analysis where uncertainty, residual distributions using the quantile-quantile (QQ) plot and error metrics analysis are used to evaluate the performance of GP operational curve models.
Section 6 provides concluding remarks and future work.
3. SCADA Data for Wind Turbine Performance Curves
These days, most wind farms are equipped with supervisory control and data acquisition (SCADA) systems that records the parameter which is broadly classified into controllable parameters (e.g., Blade pitch angle and generator torque), non-controllable parameters (e.g., wind speed, wind deviation) and performance parameters (e.g., power, generator speed, and gearbox speed). This recorded information contains continuous time observations such as load history and operation of the individual turbine, which can be utilized for overall turbine performance monitoring as well as play a significant role in identifying component failures without extra cost. The SCADA data used in this study are of 10 min (the industry standard) sampling interval and are taken from a robust wind turbine, located in Scotland, UK. In this study, monthly data from one wind turbine comprise more than 100 different signals, ranging from the timestamp, calculated values, set point, measurements of temperature, current, voltage, wind speed, power output, wind direction, etc., and are used for model training and validation purposes. For better understanding, SCADA data are generally divided into operational data, status data and warning data.
Sensor failures and data malfunction cause corrupt SCADA data and errors that make model analysis inaccurate and confusing and hence should not be used in the training stage. To obtain the best results, prior preprocessing of these data points is essential. Moreover, the GP model accuracy depends on the quality of data due to its nonparametric nature; the criteria are outlined in [
41], for example, abnormal wind speed, timestamp mismatches, out of range values, negative power values, and turbine power curtailment is preformed to remove misleading data. Despite these adopted methodologies, SCADA data are not entirely free from error but minimize its impact significantly.
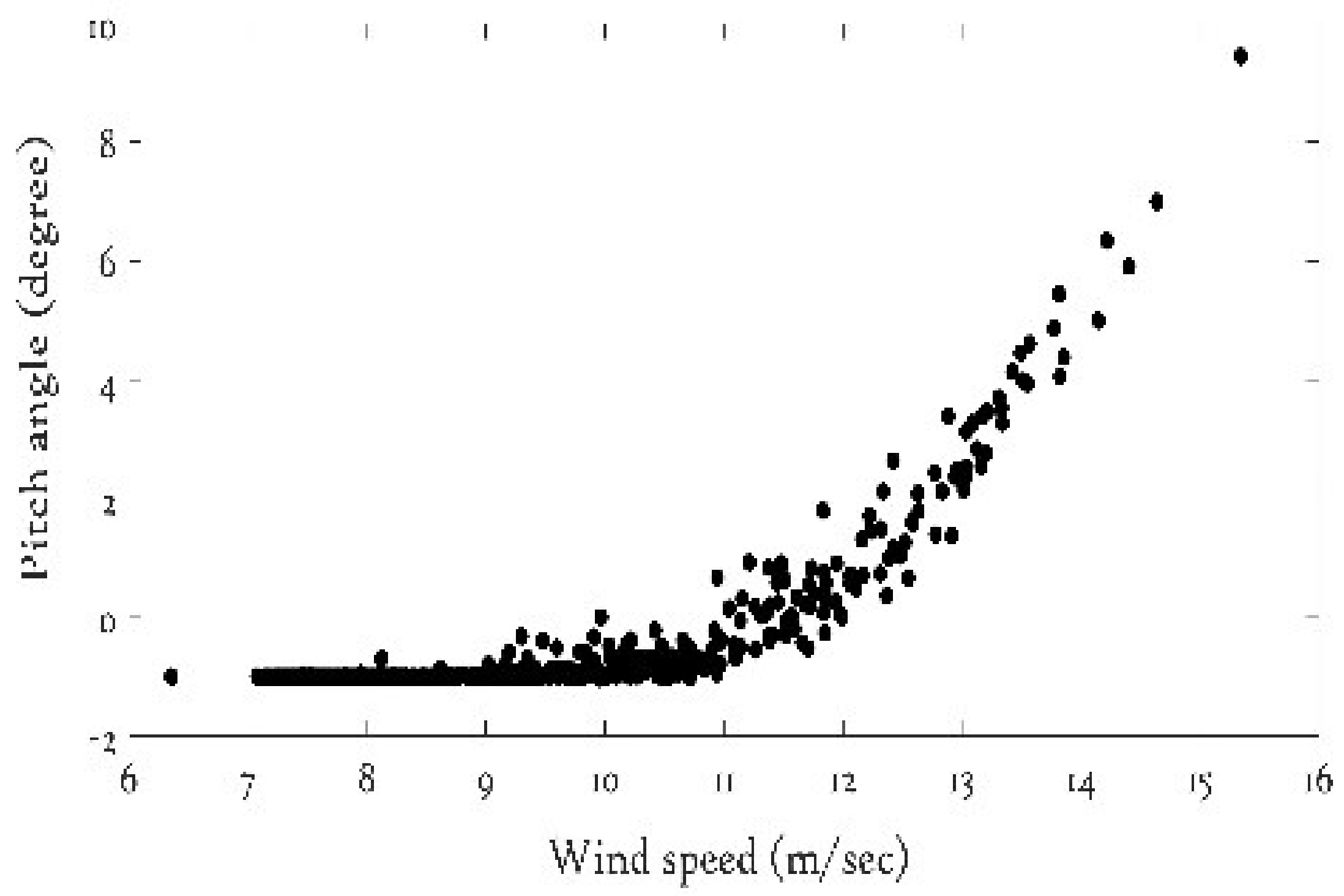
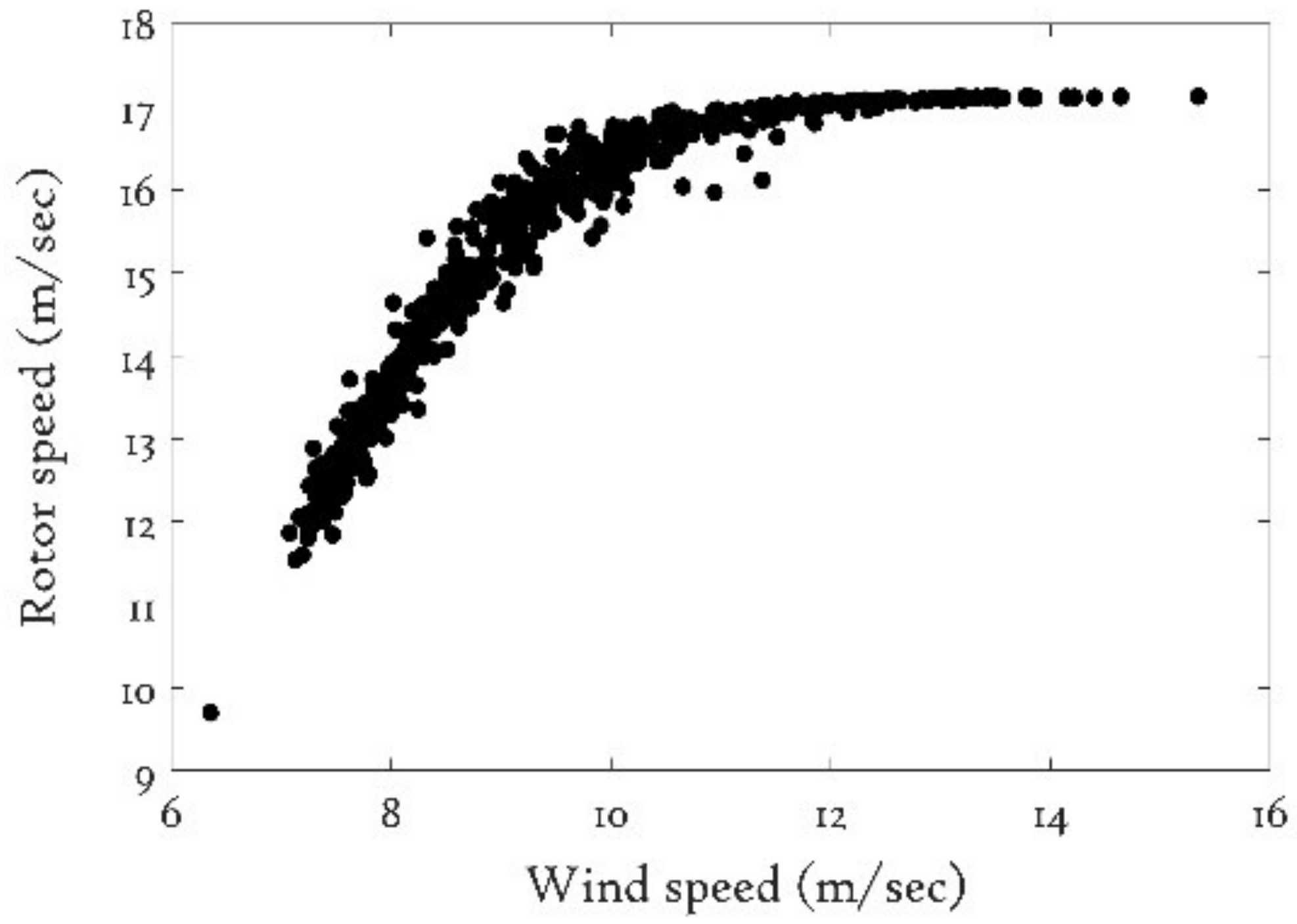
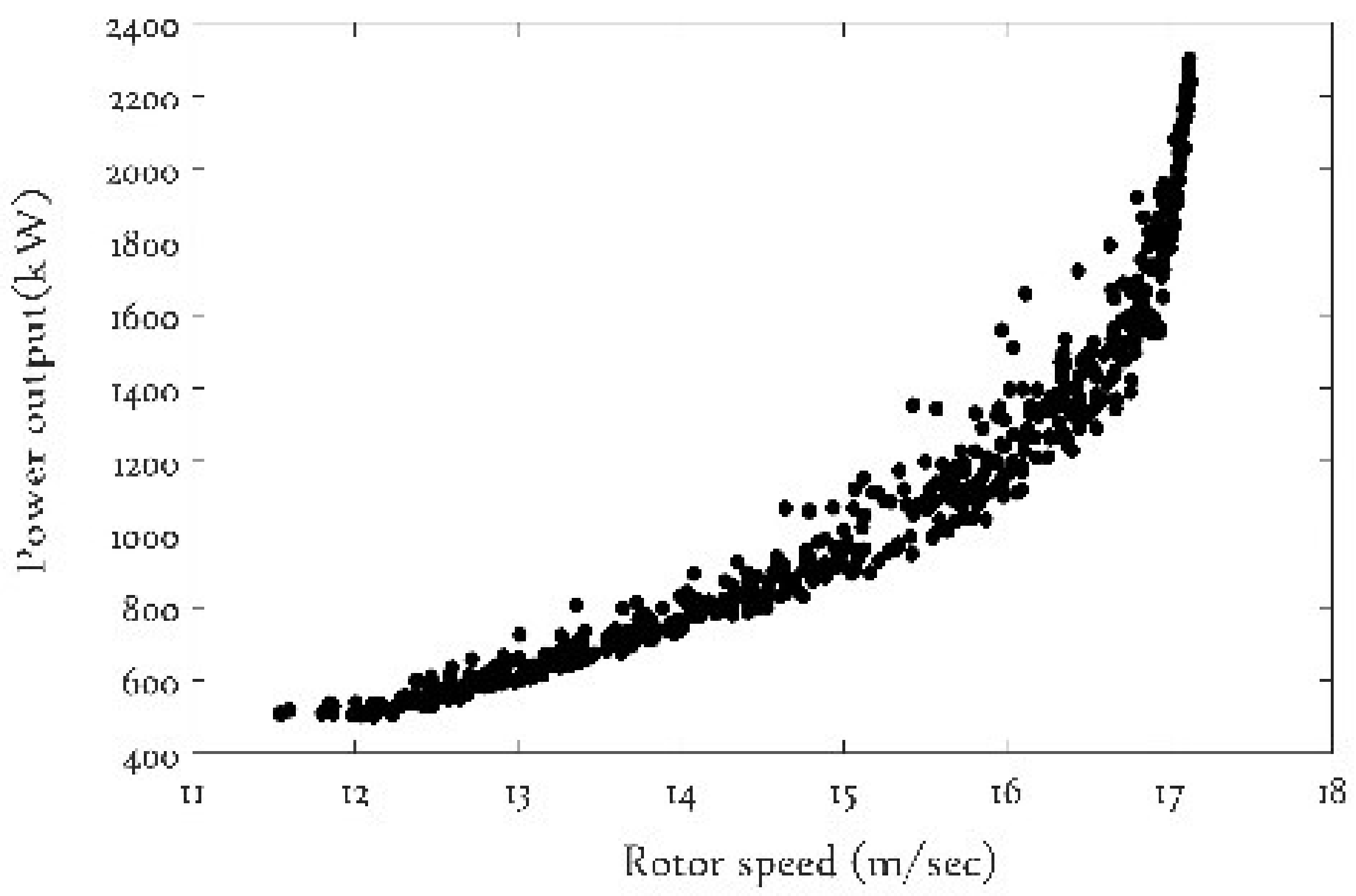
The data used in this study are from 2.3 MW Siemens turbines and contain 4464 data points that begin with the time stamp ‘‘1/7/2012 00:00 a.m.’’ and end at time stamp ‘‘31/7/2012 23:50 p.m.’’ The measured performance/operational curves using these data points are shown in
Figure 1,
Figure 2,
Figure 3 and
Figure 4. These measured data points became 626 data points after pre-processing (
Table 1) and were used to develop operational curves based on Gaussian Process models in upcoming sections. The preprocessed and air density corrected operational curves are shown in
Figure 5,
Figure 6,
Figure 7 and
Figure 8.
4. Operational Curve Modeling Using Gaussian Process
A Gaussian Process (GP) is a Bayesian, non-parametric, non-linear machine learning technique mainly used to deal with probabilistic regression and classification problems. In [
35], a brief theory of GP is well presented and used in this study as follows.
Gaussian Processes (GPs) are the generalization of a Gaussian distribution over a finite vector space to a function space of infinite dimension [
35]. A GP defines a prior over functions, which can be converted into a posterior over functions and intuitively, it can be thought of as defining a distribution over functions [
42]. The inference of a GP takes place in the space of functions [
35]. A GP, in essence, is the non-parametric generalization of a normal joint distribution for a given potentially infinite set of variables that gives an alternative way to solve nonlinear regression problems and because of its flexibility and ease of modeling, GP is considered ideal choice to solve complex issues associated with wind turbine condition monitoring. A GP is parameterized by a mean function
and covariance function
and mathematically, for the location
x, the GP
f(
x) expressed as by,
where
is the covariance function that has an associated probability density function:
where
is defined as a determinant of
,
is the dimension of random input vector
, and µ is mean vector of
. The term under the exponent, i.e.,
is an example of a quadratic shape, and the mean function is commonly fixed to zero [
35].
The covariance functions or kernels measure the similarity between two data points to calculate the closeness and is the soul of any GP model. GP model behavior is entirely described by its co-variance functions which makes a selection of a suitable covariance function crucial for accurate GP modeling. A detailed presentation of many possible kernels is presented in [
35,
42], and selection is based on the nature of the data. In this study, squared exponential covariance function is used and for any finite collection of inputs
, it is mathematically described as:
As described already, SCADA data are not immune to measurement error, hence it is desirable to add a noise term to the covariance function to compensate the impact the measurement error and improve the accuracy of the GP model. Hence, Equation (6) can be altered to be:
where
and
are known as the hyper-parameters.
signifies the signal variance and
is a characteristic length scale which describes how quickly the covariance decreases with the distance between points.
is the standard deviation of the noise fluctuation and gives information about model uncertainty.
is the Kronecker delta [
35].
The basic Gaussian Process regression (GPR) theory is inspired from [
35] and is described as follows. The Gaussian Process regression model assumes that for a Gaussian process
f observed at coordinates
x, the vector of values
is just one sample from a multivariate Gaussian distribution of dimension equal to a number of measured coordinates
. Therefore, the
under zero-mean distribution function is
where
is the covariance matrix between all possible pairs
for a given set of hyper parameters
. The squared exponents have hyper parameters;
,
and
and need to be optimized for a better result. To do so, maximization of the log marginal likelihood described in [
35] is used and is given below,
The maximization of this marginal likelihood towards
θ provides the complete specification of the GP
and improves the model accuracy. Once hyperparameters have been optimized using Equation (9), the estimation of the distribution of
for a given
is straightforward and taking the samples from the estimated distribution,
where
A is the posterior mean estimate and is defined as,
Moreover, the posterior variance estimate
B is defined as:
where
is the covariance between the new data points of estimation
x* and all other measured coordinates
x for a given hyper parameter vector
θ,
and
are defined already and
is the variance at point
x* as dominated by
θ. It should be noted that that the posterior mean estimate
is a linear combination of the observations
; in a similar manner the variance of
is actually independent of the observations
.
The covariance matrix,
K, gives the variance of each variable along the leading diagonal, and the off-diagonal elements measure the correlations between the different variables mathematically described as follows:
is of size
, where
is the number of input parameters considered, and it must be symmetric and positive semidefinite, i.e.,
.
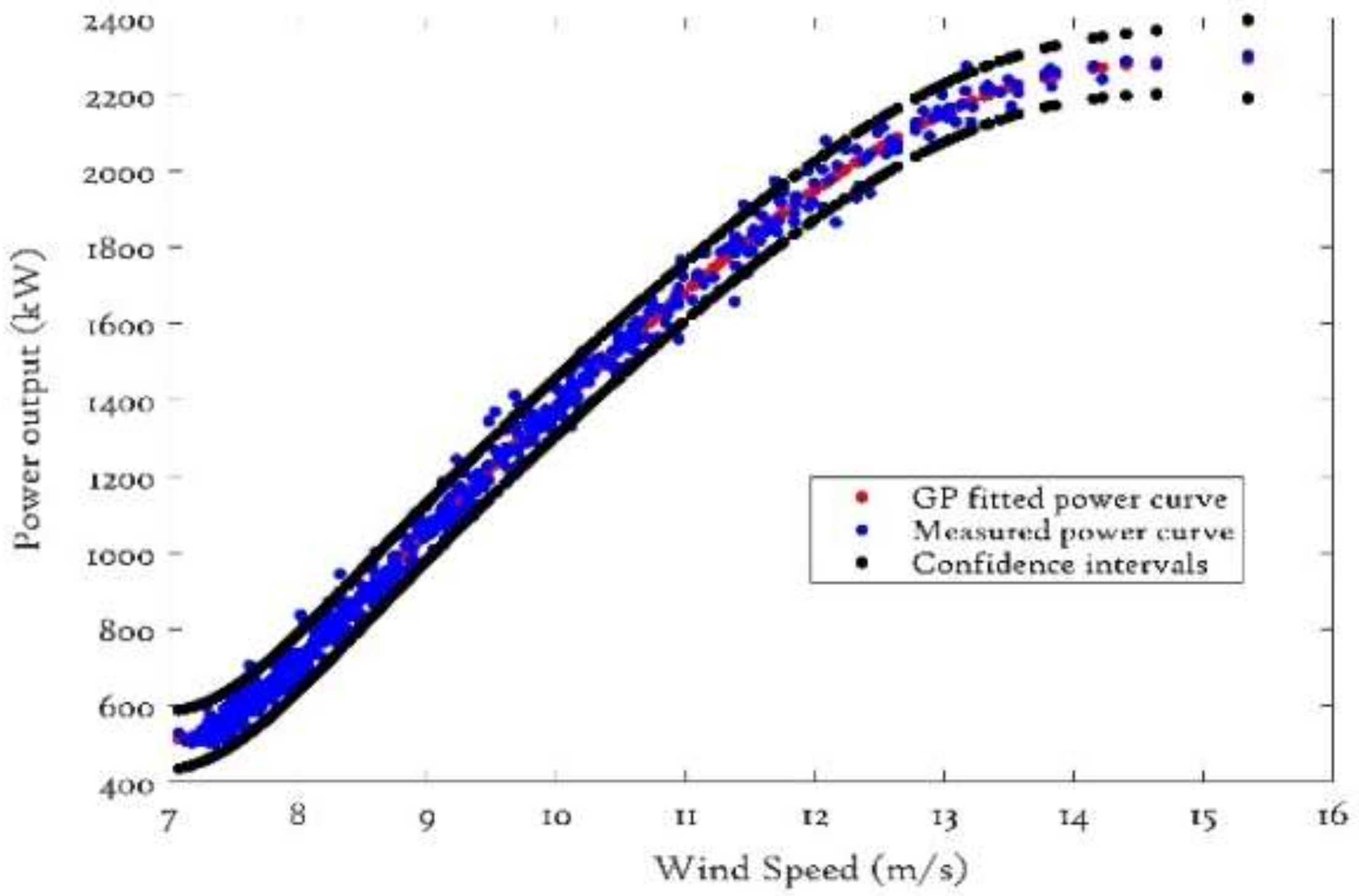
Using the filtered and corrected operational curve SCADA datasets (of
Figure 5,
Figure 6,
Figure 7 and
Figure 8), estimated operational curves were constructed using GP models (realized in MATLAB), and are shown in
Figure 9,
Figure 10,
Figure 11 and
Figure 12; GP closely following the expected variance. However, a large number of data points makes the GP model inaccurate due to its process involved in inverting a matrix of dimension computation of the marginal likelihood and is equal to the number of data points. This asymptotic complexity is called cubic inversion
where
N is the number of data points. If
N contains large data sets, then the computation of
matrix becomes problematic and affects the GP model accuracy. Various techniques are proposed to solve this cubic inversion issues [
43,
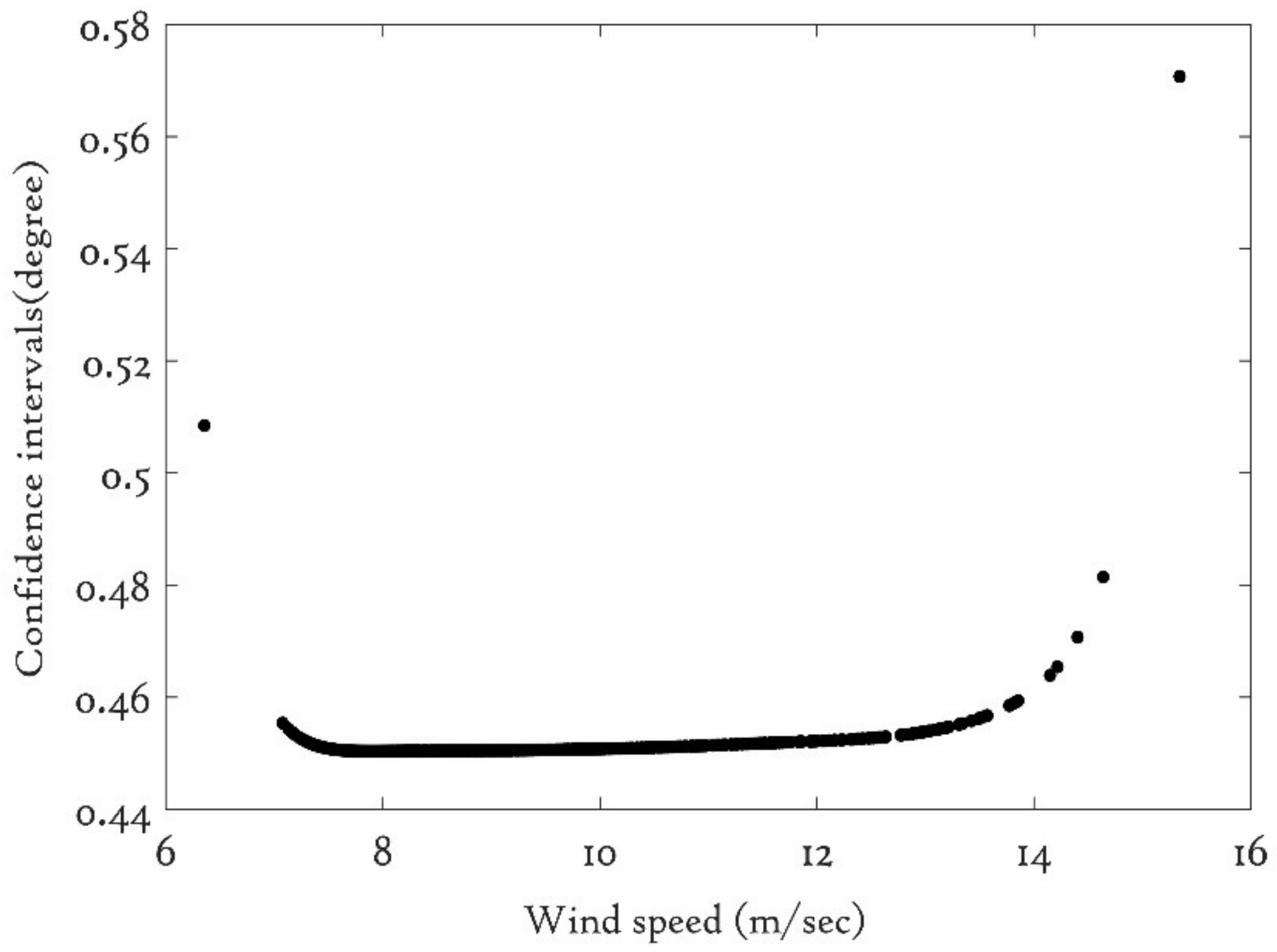
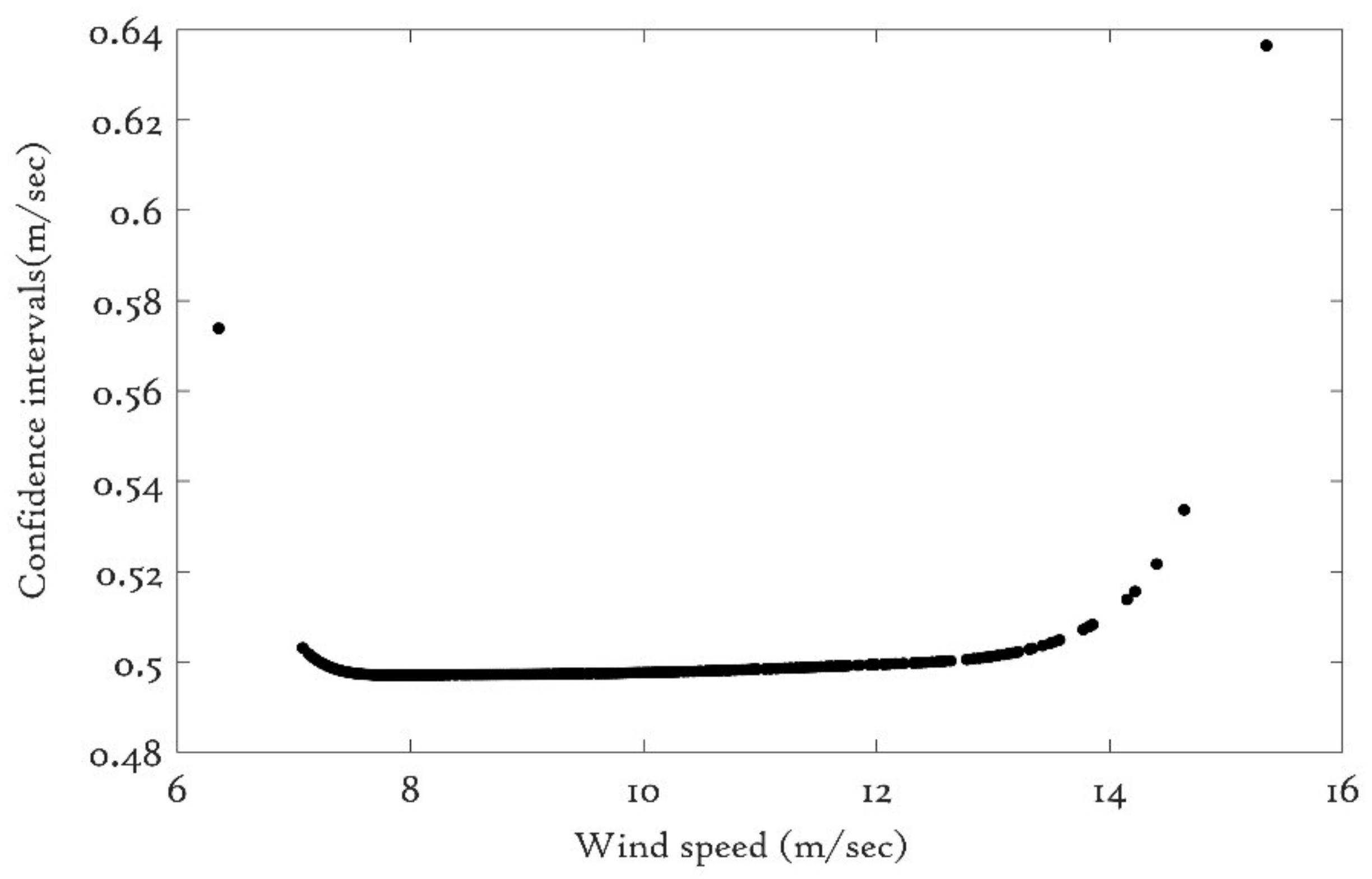
44], yet these methods require high processing power and computational cost; however, GP works well with limited data sets. GP models have confidence intervals (CIs) that are valuable for uncertainty examination and are depicted in the next sections.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}