Integrated Control for Small Power Wind Generator




Abstract
:1. Introduction
2. Small Scale Wind Energy Conversion System
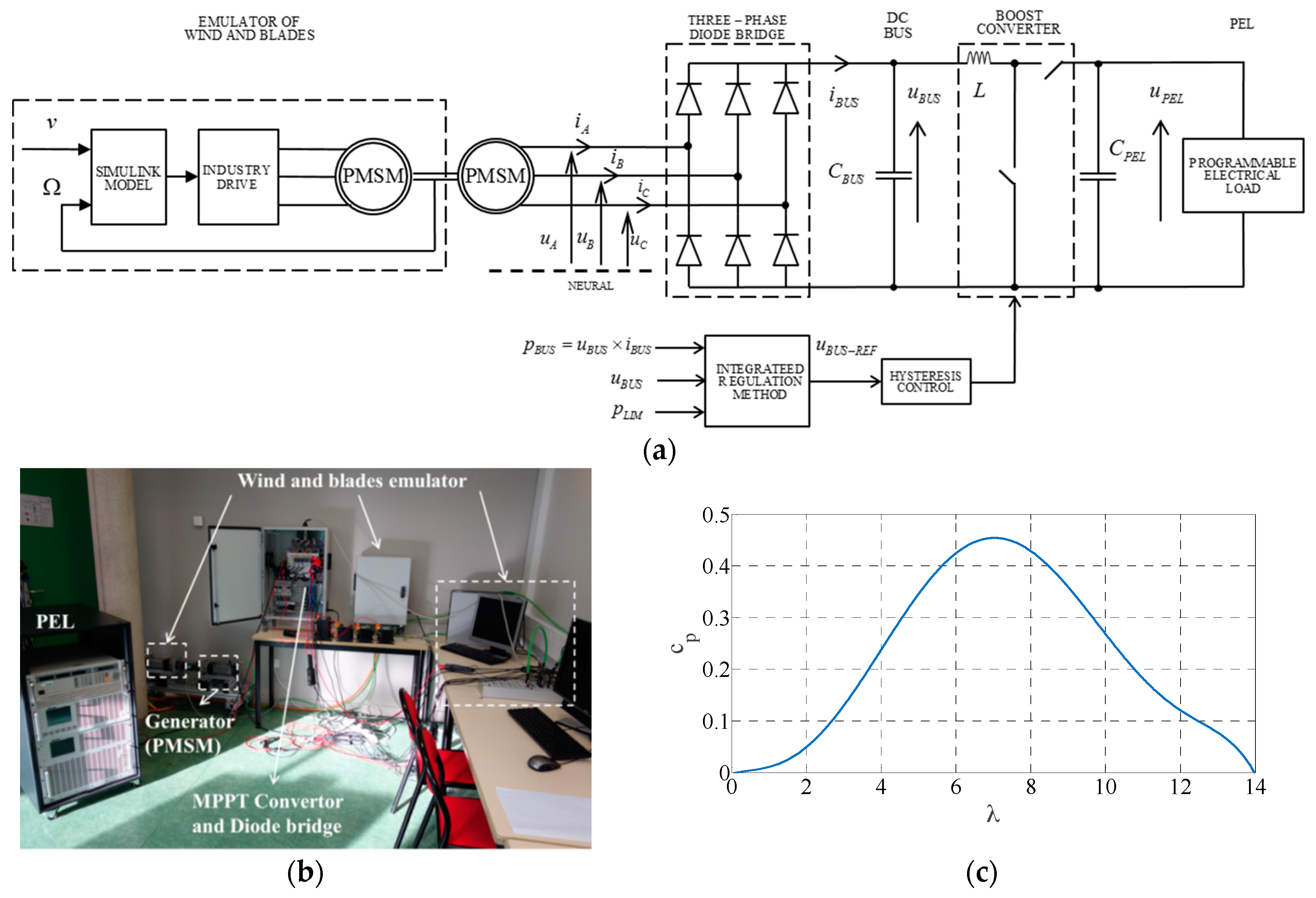
2.1. Overview of Test Bench
2.2. Electrical Power Distribution
3. Problem Formulation
3.1. Control Loop
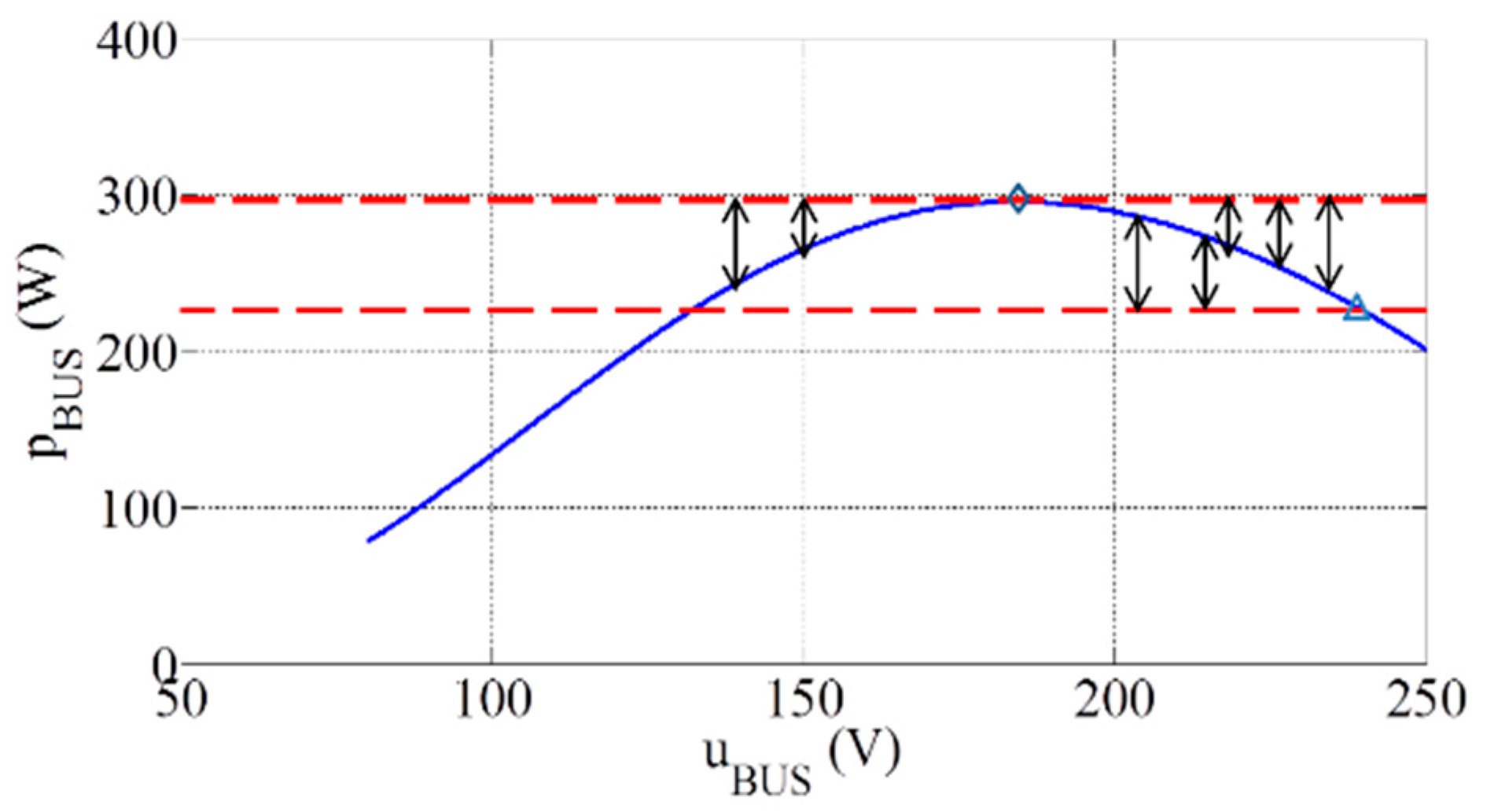
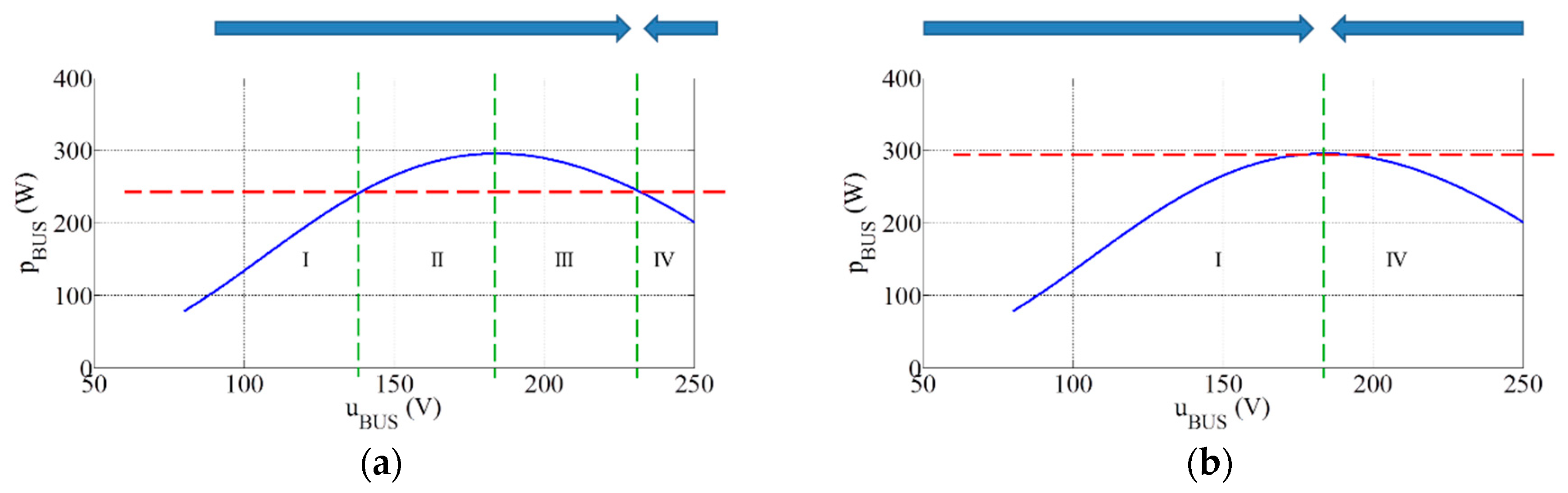
3.2. Principle of Power Control Strategy Methods
3.2.1. Fixed Step-Size
3.2.2. Improved Variable Step-Size Designed with Newton–Raphson Technique
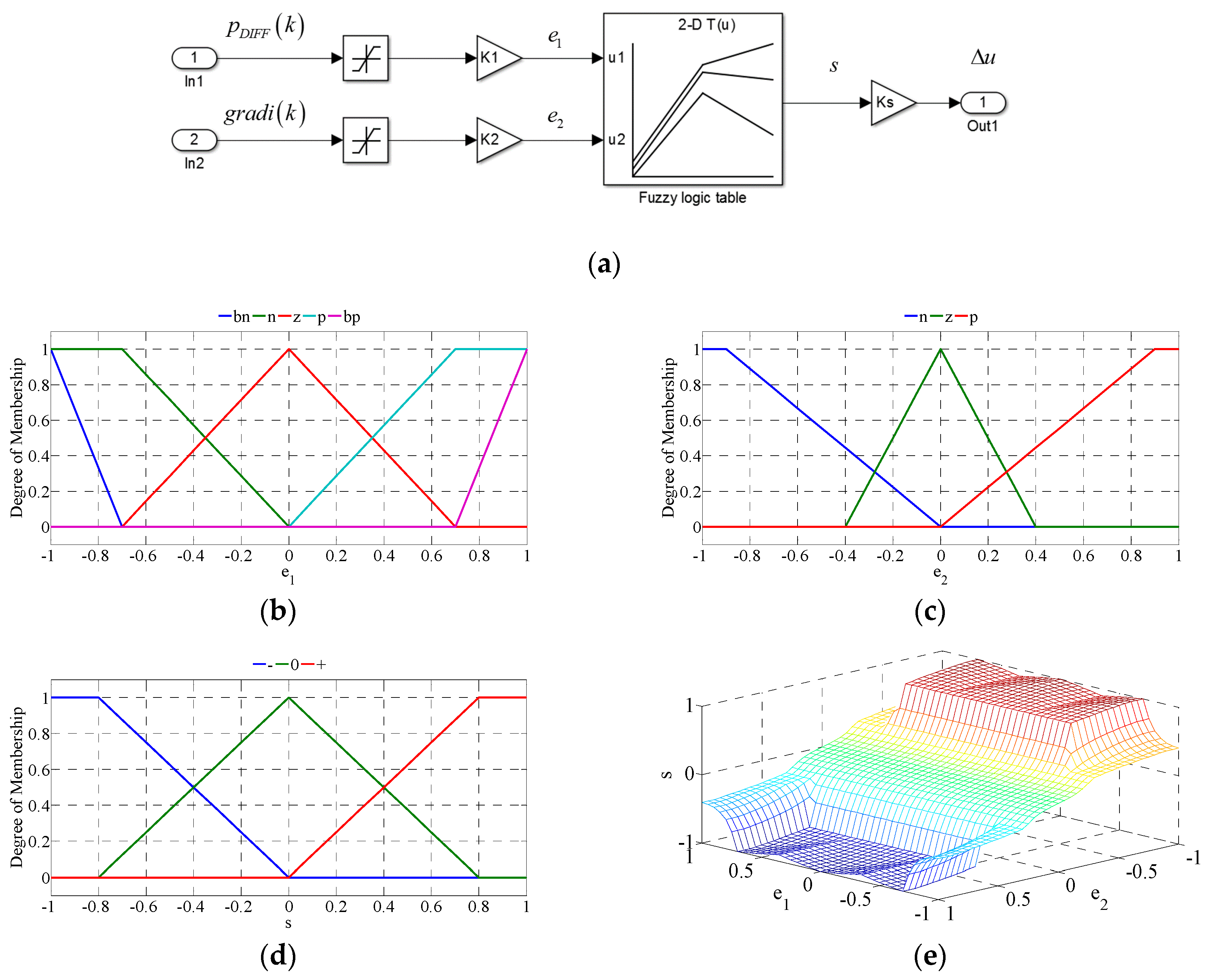
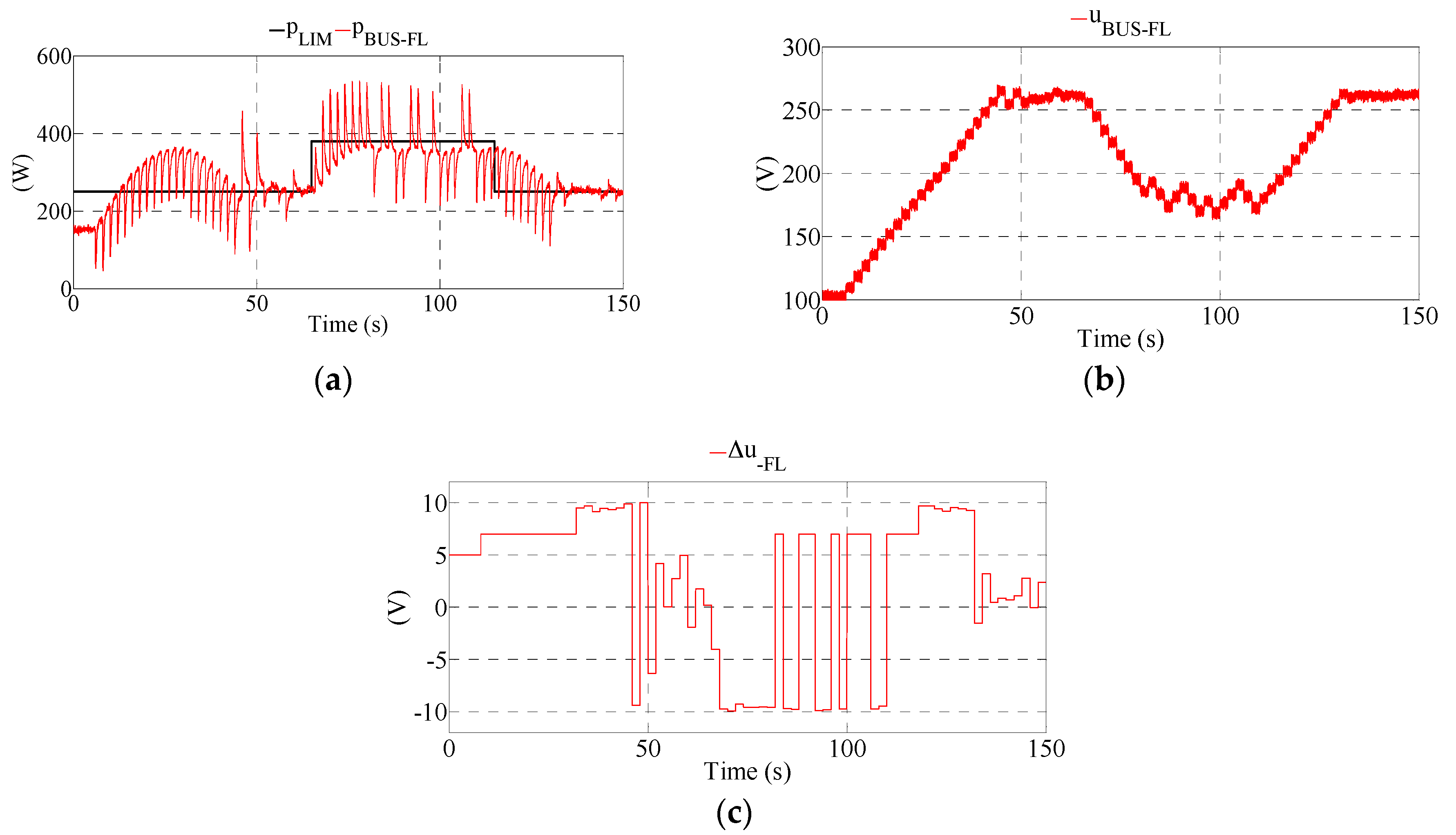
3.2.3. Variable Step-Size with Fuzzy Logic
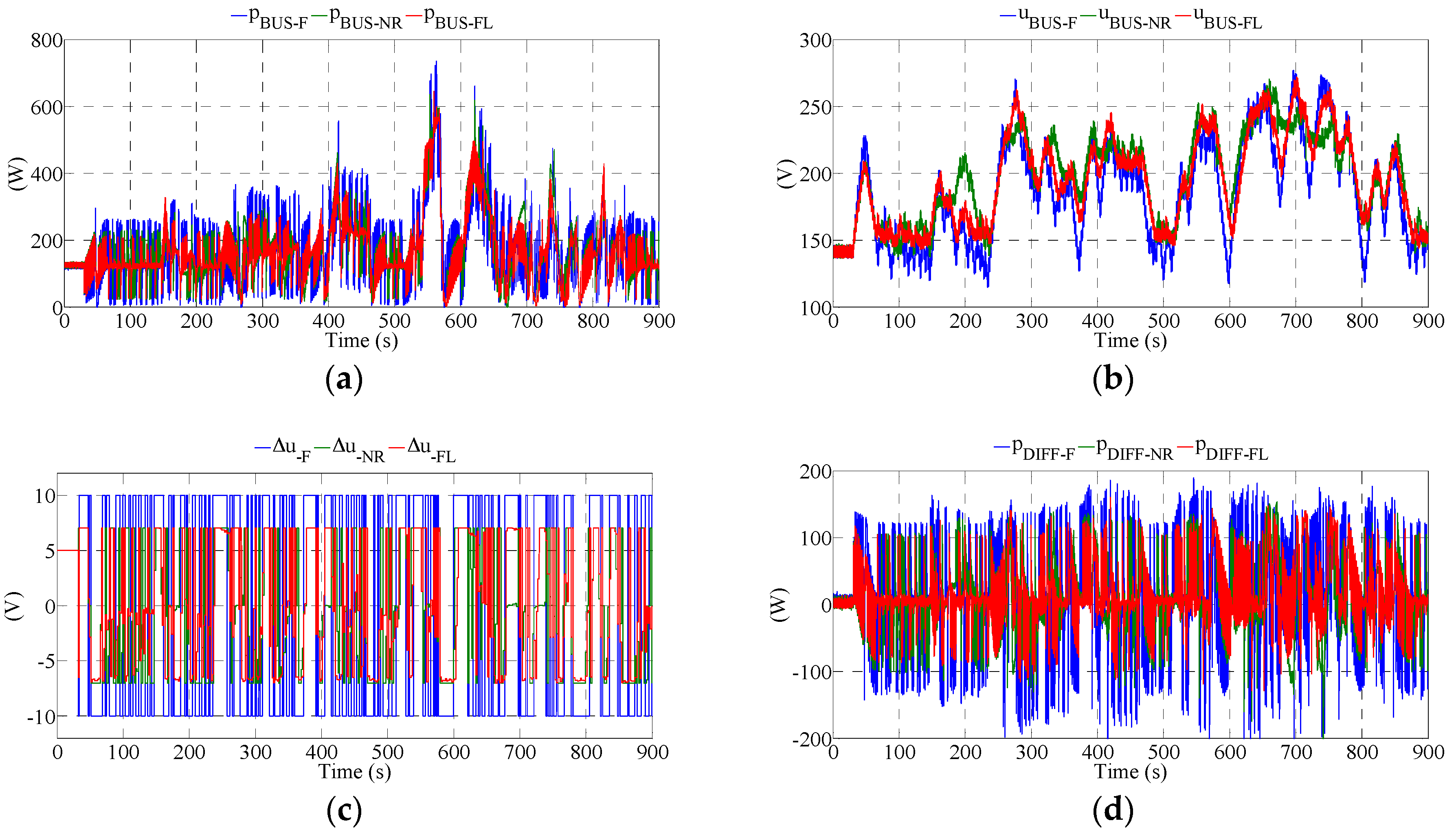
4. Analysis of Comparative Results
- Fixed step-size: step-size equals 10 V, 7 V, 5 V and 2.5 V.
- Improved variable step-size designed with Newton–Raphson technique: maximum value of step-size equals 10 V, 7 V, 5 V and 2.5 V.
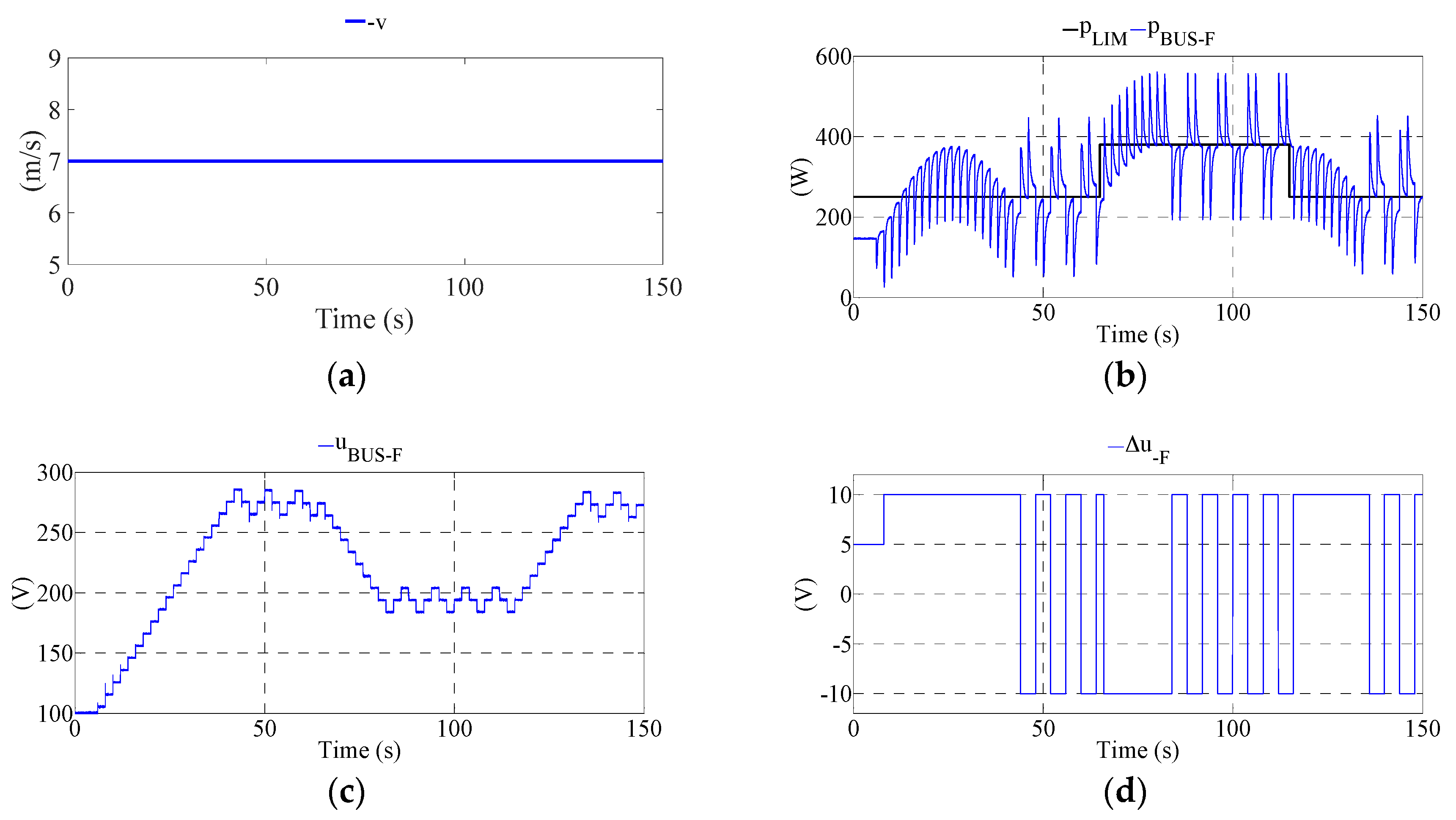
- Variable step-size based on fuzzy logic: the combination of parameters (K1, K2, Ks) respectively equal: (4.5, 17.5, 7), (4.5, 17.5 10), (5, 15, 7), (5, 15, 10), (5, 20, 7), (5, 20, 10), (10, 20, 7), and (10, 20, 10).
5. Conclusions
Author Contributions
Conflicts of Interest
Nomenclature
| Wind velocity | |
| Capacitor at the DC bus | |
| Inductance at the DC bus | |
| Capacitor as the Programmable Electronic Load side | |
| Harvested aerodynamic power | |
| Power coefficient | |
| Blade radius | |
| Air density | |
| Tip speed ration | |
| Equivalent inertia of blades and hub | |
| Viscous damping coefficient | |
| Electrical DC BUS power of experimental platform | |
| Electrical DC BUS voltage of experimental platform | |
| Electrical DC BUS current of experimental platform | |
| Reference of DC BUS voltage of experimental platform | |
| Three-phase voltages | |
| Three-phase currents | |
| Perturbation step-size | |
| Demanded power value for power limited control | |
| Difference between the actual and demanded power | |
| Change of DC bus voltage | |
| Change of DC bus power | |
| Change of the pDIFF | |
| Experimental DC bus power for fixed perturb step-size method in Figure 7 | |
| Experimental DC bus voltage for fixed perturb step-size method in Figure 7 | |
| Experimental evaluation of Δu in Figure 7 | |
| Calculated reference of DC bus voltage for variable step-size method | |
| Experimental DC bus power for variable perturb step-size method in Figure 8 | |
| Experimental DC bus voltage for variable perturb step-size method in Figure 8 | |
| Experimental evaluation of Δu in Figure 8 | |
| gradi(k) | Ratio between the change of electrical power and the change of voltage |
| Gain for normalizing the first input of fuzzy logic method | |
| Gain for normalizing the second input of fuzzy logic method | |
| Gain for antinormalizing the output of fuzzy logic method | |
| Experimental DC bus power for fuzzy logic method in Figure 10 | |
| Experimental DC bus voltage for fuzzy logic method in Figure 10 | |
| Experimental evaluation of Δu in Figure 10 | |
| Evaluation of pDIFF for the fixed step-size perturbation and observation method | |
| Evaluation of pDIFF for the variable step-size perturbation and observation method | |
| Evaluation of pDIFF for the fuzzy logic method | |
| Theoretical maximum value of DC bus power based on the wind velocity curve in Figure 11a | |
| Theoretical minimum value of DC bus power based on the wind velocity curve in Figure 11a |
References
- American Wind Energy Association. Available online: http://www.awea.org (accessed on 14 March 2018).
- Carbon Trust. Small-Scale Wind Energy: Policy Insights and Practical Guidance; Carbon Trust: London, UK, 2008. [Google Scholar]
- Abdullah, M.A.; Yatim, A.H.M.; Tan, C.W.; Saidur, C.W. A review of maximum power point tracking algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2012, 16, 3220–3227. [Google Scholar] [CrossRef]
- Orlando, N.A.; Liserre, M.; Mastromauro, R.A.; Dell’Aquila, A. A Survey of Control Issues in PMSG-Based Small Wind-Generator Systems. Ind. Inf. 2013, 9, 1211–1221. [Google Scholar] [CrossRef]
- Liu, H.L.; Locment, F.; Sechilariu, M. Maximum Power Point Tracking Method for Small Scale Wind Generator Experimental validation. In Proceedings of the SICE 2015 54th Annual Conference, Hangzhou, China, 28–30 July 2015; pp. 864–869. [Google Scholar]
- Rahim, A.H.M.A. Optimum relation based maximum power point tracking of a PMSG wind generator through converter controls. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014; pp. 1–4. [Google Scholar]
- Linus, R.M.; Damodharan, P. Maximum power point tracking method using a modified perturb and observe algorithm for grid connected wind energy conversion systems. IET Renew. Power Gener. 2015, 9, 682–689. [Google Scholar] [CrossRef]
- Daili, Y.; Gaubert, J.P.; Rahmani, L. Implementation of a new maximum power point tracking control strategy for small wind energy conversion systems without mechanical sensors. Energy Convers. Manag. 2015, 97, 298–306. [Google Scholar] [CrossRef]
- Vijayakumar, K.; Kumaresan, N.; Ammasaigounde, N. Speed sensor-less maximum power point tracking and constant output power operation of wind-driven wound rotor induction generators. IET Power Electron. 2015, 8, 33–46. [Google Scholar] [CrossRef]
- Al-Ghossini, H.; Locment, F.; Sechilariu, M. Experimental comparison of small wind turbine vector control with and without position sensor—Extended Kalman filter application. In Proceedings of the 15th European Conference on Power Electronics and Applications, Lille, France, 2–6 September 2013; pp. 1–9. [Google Scholar]
- Al-Ghossini, H.; Liu, H.L.; Locment, F.; Sechilariu, M. Estimation of speed rotation for MPPT used by small scale wind generator integrated in DC microgrid. In Proceedings of the 40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 1–6. [Google Scholar]
- Qi, Z.; Lin, E. Integrated power control for small wind power system. Power Sources 2012, 217, 322–328. [Google Scholar] [CrossRef]
- Dalala, Z.M.; Ullah Zahid, Z.; Lai, J.S. New Overall Control Strategy for Small-Scale WECS in MPPT and Stall Regions with Mode Transfer Control. Energy Convers. 2013, 28, 1082–1092. [Google Scholar] [CrossRef]
- Yin, X.; Lin, Y.; Li, W.; Liu, H.; Gu, Y. Output power control for hydro-viscous transmission based continuously variable speed wind turbine. Renew. Energy 2014, 72, 395–405. [Google Scholar] [CrossRef]
- Cheng, J.; Chen, J.; Gong, C.; Deng, X. Energy management and power control for a stand-alone wind energy conversion system. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 989–994. [Google Scholar]
- Joanne, H.; Alireza, B.; Praveen, J. Power management supervisory control algorithm for standalone wind energy systems. In Proceedings of the 2014 IEEE 36th International Telecommunications Energy Conference (INTELEC), Vancouver, BC, Canada, 28 September–2 October 2014; pp. 1–6. [Google Scholar]
- Mohseni, M.; Islam, S.M.; Masoum, M.A.S. Enhanced Hysteresis-Based Current Regulators in Vector Control of DFIG Wind Generators Power Electronics. Power Electron. 2011, 26, 223–234. [Google Scholar] [CrossRef]
- Liu, H.L.; Locment, F.; Sechilariu, M. Experimental analysis of impact of Maximum Power Point Tracking methods on energy efficiency for small scale wind energy conversion system. IET Renew. Power Gener. 2016, 11, 389–397. [Google Scholar] [CrossRef]
- Houssamo, I.; Locment, F.; Sechilariu, M. Experimental analysis of impact of MPPT methods on energy efficiency for photovoltaic power systems. Int. J. Electr. Power Energy Syst. 2013, 46, 98–107. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment | Type |
|---|---|
| Three-phase driver | Parker C3S063V2F10 |
| PMSM | Parker NX430EAJR7000 |
| Three-phase diode bridge | SEMIKRON SKD 51/14 |
| Capacitor | 1 mF |
| Inductance | 50 mH (267.5 mΩ) |
| IGBT module | SEMIKRON SKM100GB063D |
| PEL | Puissance+ PL-6000-A |
| Capacitor | 1.1 mF |
| Variables | I | II | III | IV | ||||
|---|---|---|---|---|---|---|---|---|
| ↑ | ↓ | ↑ | ↓ | ↑ | ↓ | ↑ | ↓ | |
| ↑ | ↓ | ↑ | ↓ | ↓ | ↑ | ↓ | ↑ | |
| ↓ | ↑ | ↑ | ↓ | ↓ | ↑ | ↑ | ↓ | |
| Variables | I | IV | ||
|---|---|---|---|---|
| ↑ | ↓ | ↑ | ↓ | |
| ↑ | ↓ | ↓ | ↑ | |
| ↓ | ↑ | ↑ | ↓ | |
| s | e2 (pDIFF) | |||
|---|---|---|---|---|
| Negative (n) | Zero (z) | Positive (p) | ||
| e1 (gradi) | Big Negative (bn) | 0 | 0 | 0 |
| Negative (n) | + | 0 | − | |
| Zero (z) | + | 0 | − | |
| Positive (p) | + | 0 | − | |
| Big Positive (bp) | 0 | 0 | 0 | |
| Method | Mean Sampling | Variance Sampling | Mean Overall | Variance Overall |
|---|---|---|---|---|
| Fixed 10 V | 0.1383 | 14.9045 | 0.1347 | 39.5348 |
| Variable 7 V | 0.1296 | 21.4507 | 0.1326 | 26.0033 |
| Fuzzy (10, 20, 7) | 0.1613 | 19.0379 | 0.1662 | 22.0579 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Locment, F.; Sechilariu, M. Integrated Control for Small Power Wind Generator. Energies 2018, 11, 1217. https://doi.org/10.3390/en11051217
Liu H, Locment F, Sechilariu M. Integrated Control for Small Power Wind Generator. Energies. 2018; 11(5):1217. https://doi.org/10.3390/en11051217
Chicago/Turabian StyleLiu, Hongliang, Fabrice Locment, and Manuela Sechilariu. 2018. "Integrated Control for Small Power Wind Generator" Energies 11, no. 5: 1217. https://doi.org/10.3390/en11051217
APA StyleLiu, H., Locment, F., & Sechilariu, M. (2018). Integrated Control for Small Power Wind Generator. Energies, 11(5), 1217. https://doi.org/10.3390/en11051217