Short-Term Solar Irradiance Forecasts Using Sky Images and Radiative Transfer Model


Abstract
:1. Introduction
2. Data
3. Method
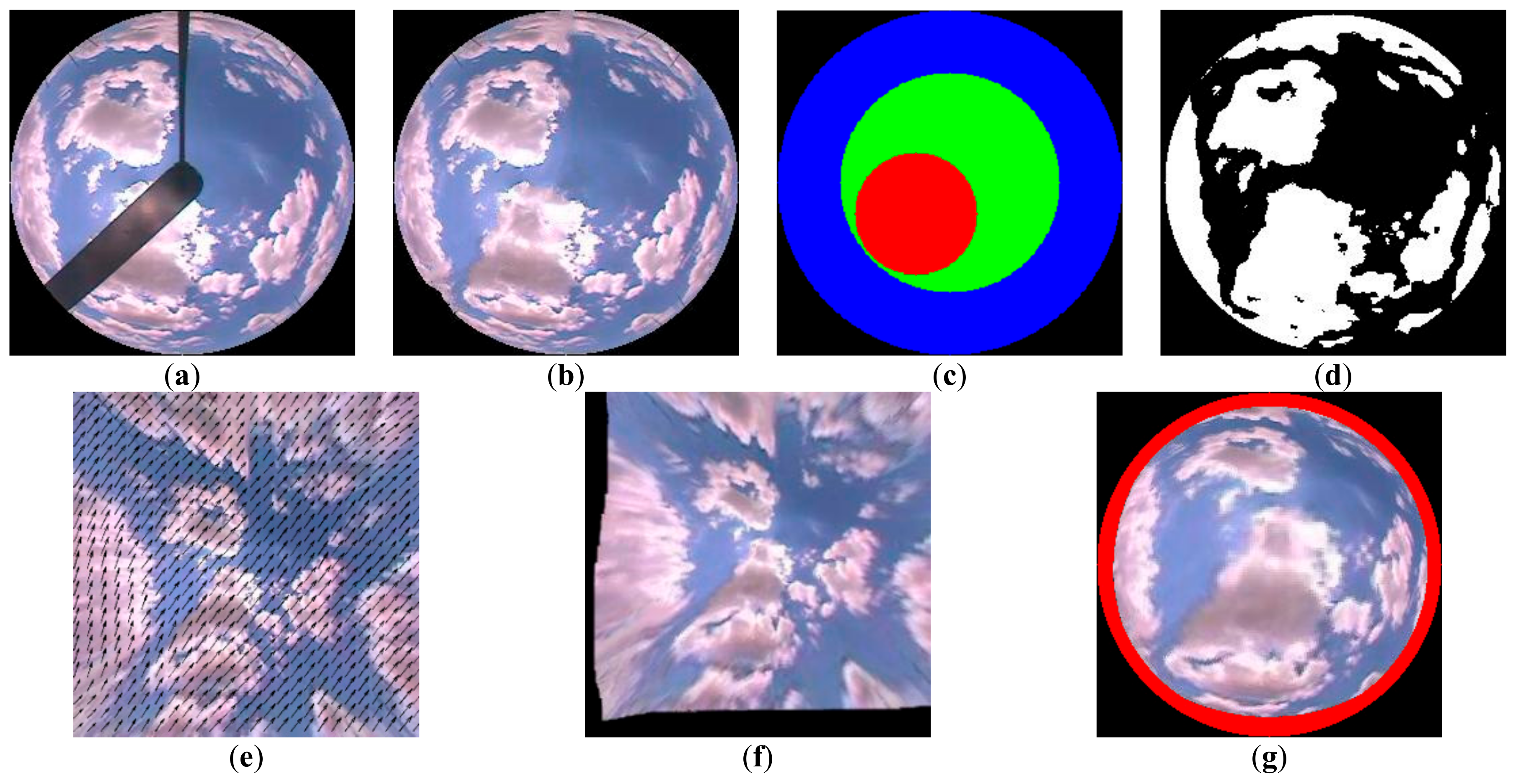
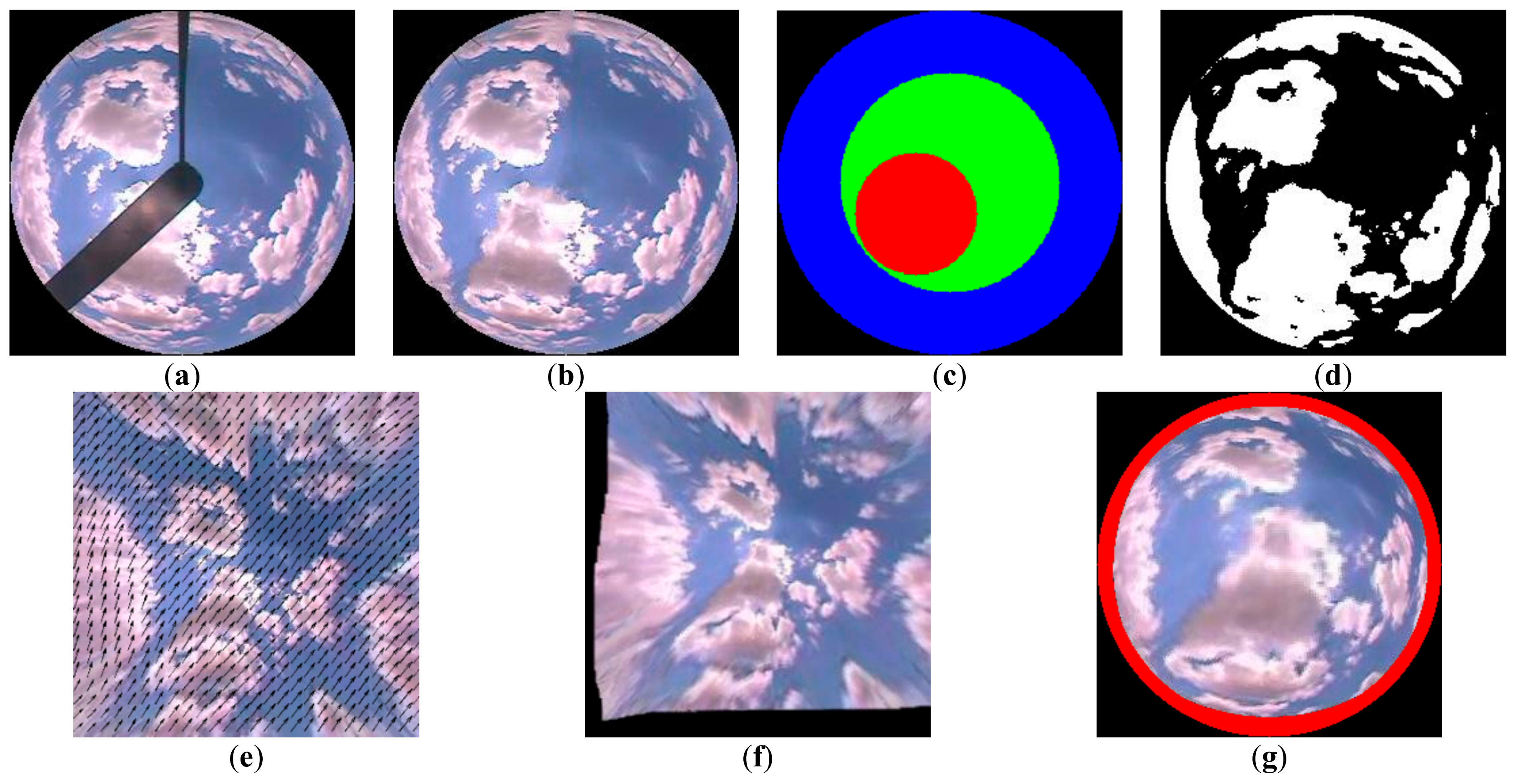
3.1. TSI Image Processing
3.2. Computing Velocity Fields by the Optical Flow Method
3.3. Solar Irradiance Simulation with RTM
3.3.1. Computing the Zenith and Azimuth Angle of Each Pixel on the Sky Image
3.3.2. Locating the Sun’s Position on the Image
3.3.3. Solar Irradiance Simulation with RTM
3.4. Solar Irradiance Forecast
4. Result and Discussion
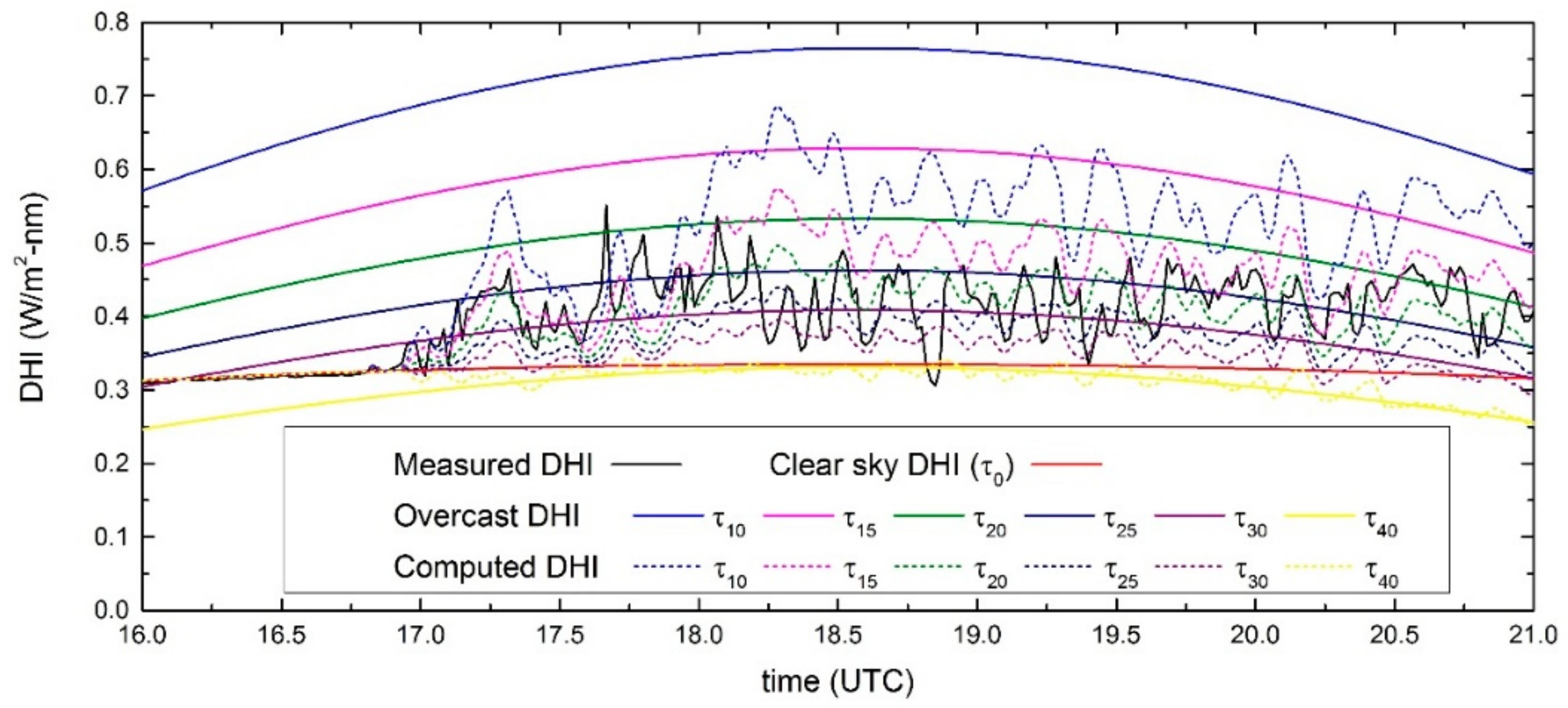
4.1. Selecting Appropriate Cloud Optical Depths
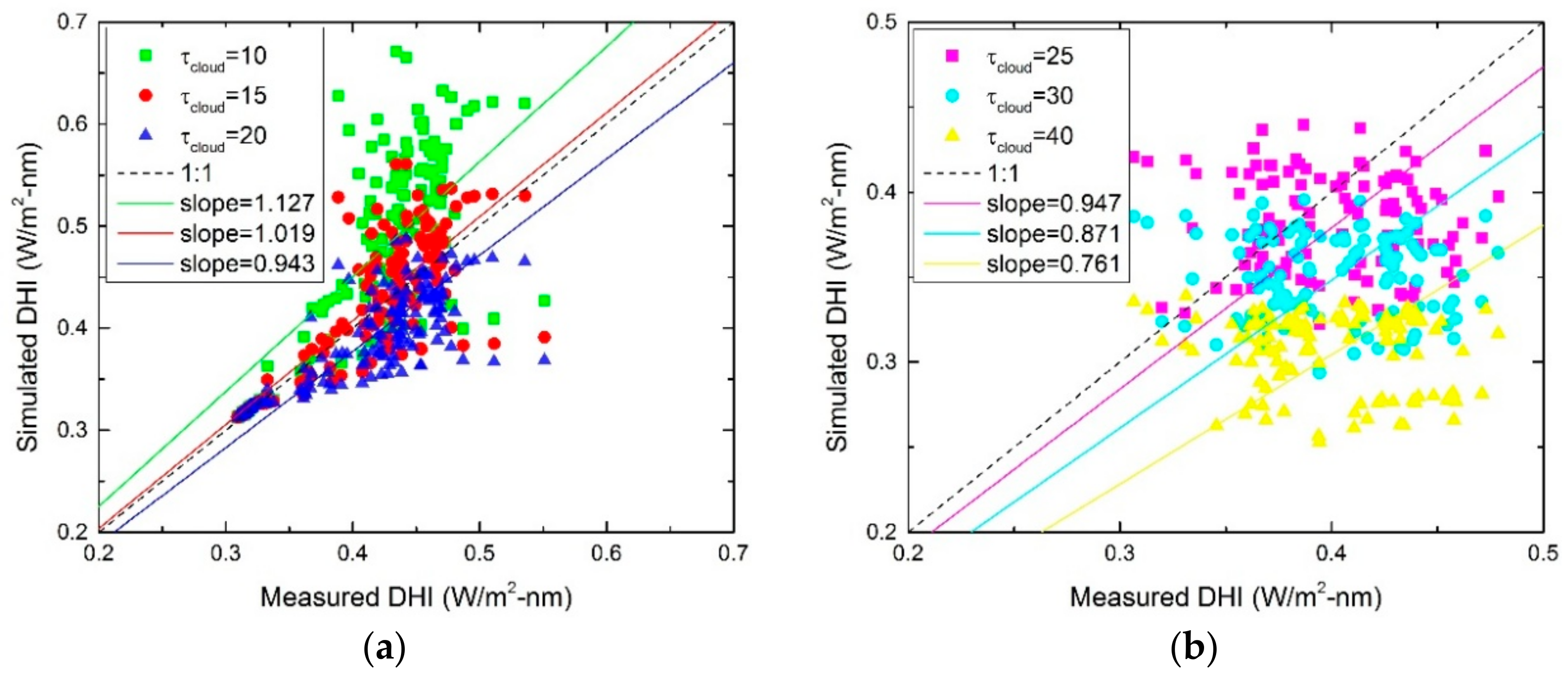
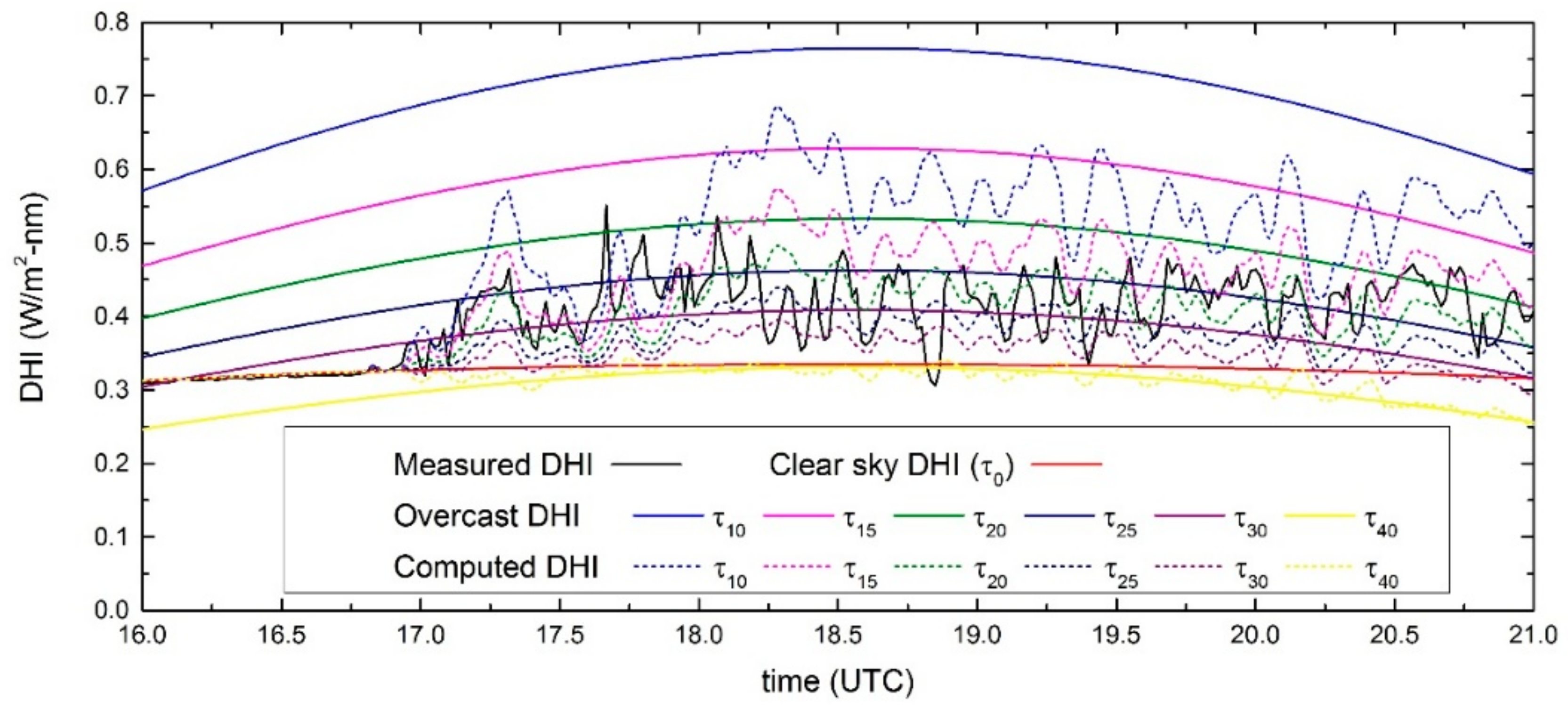
4.2. Evaluating the Error of Solar Irradiance Simulation with RTM
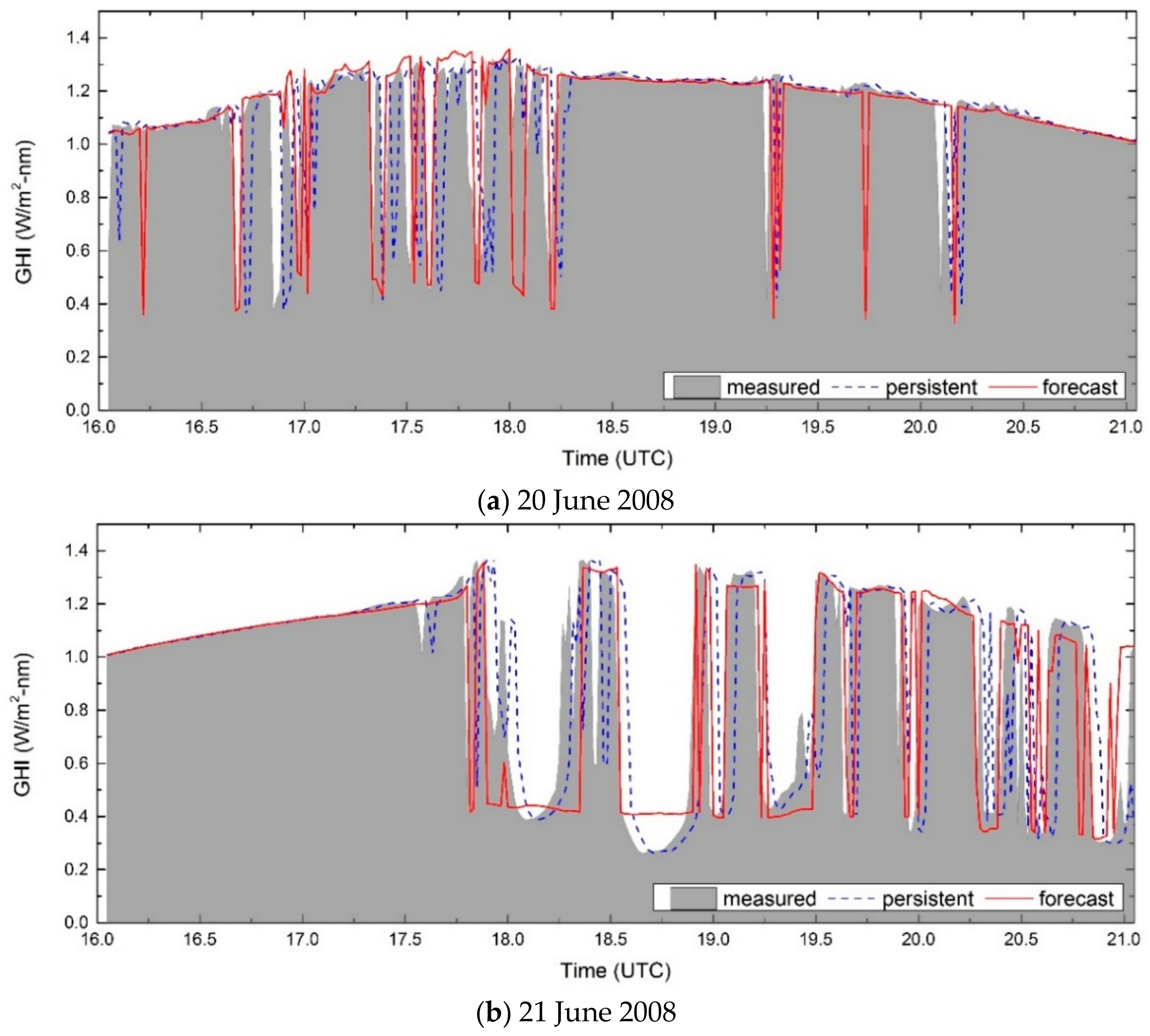
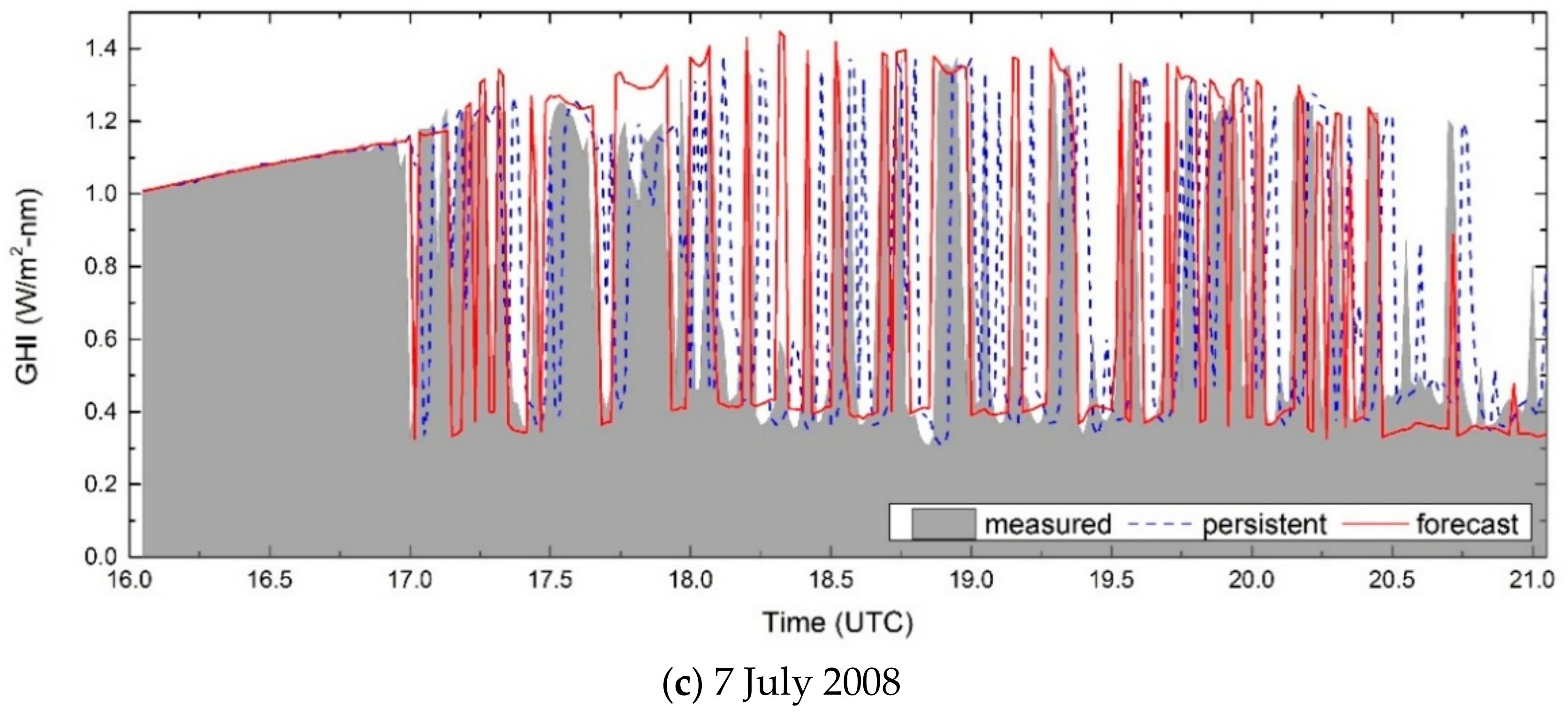
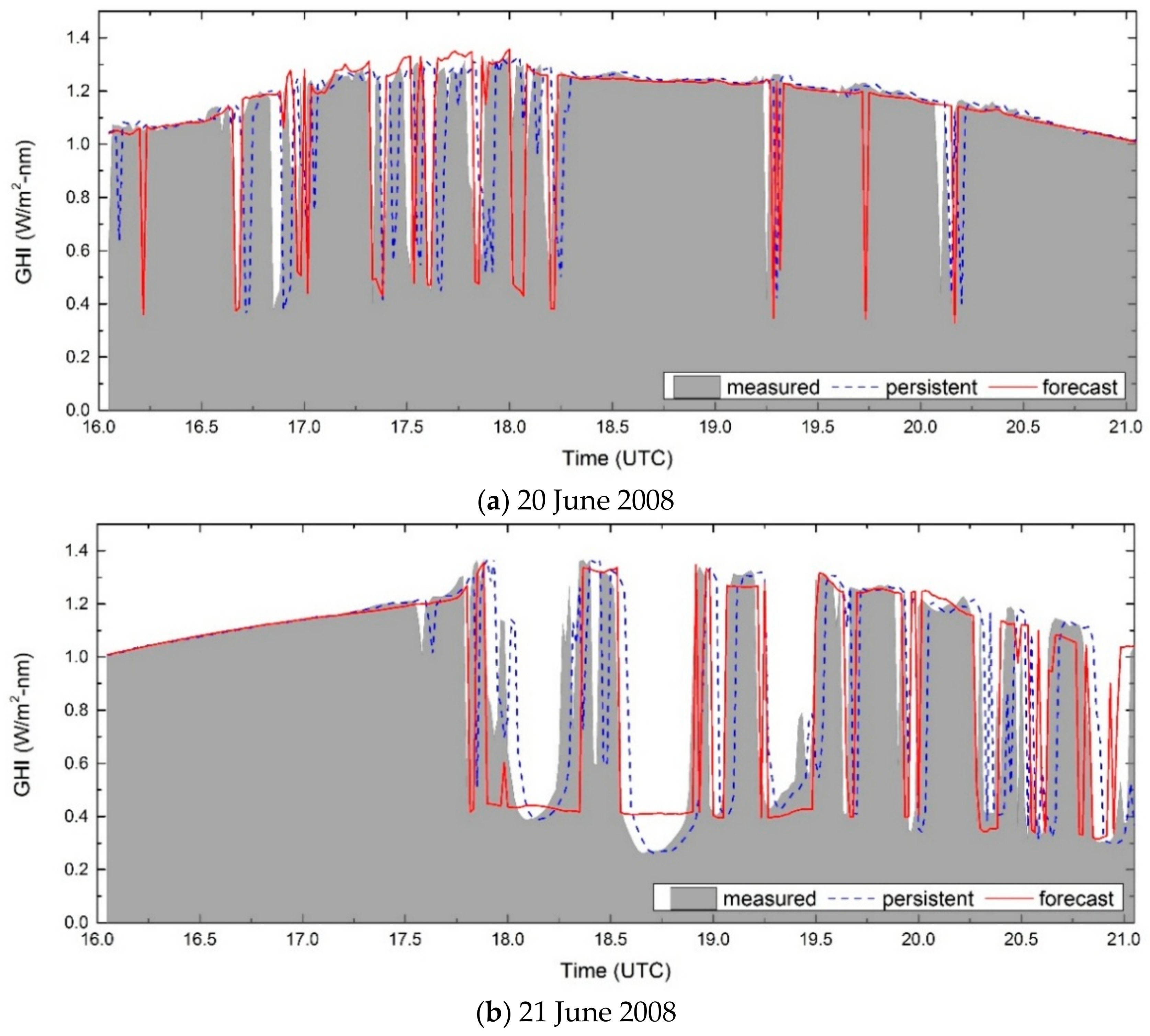
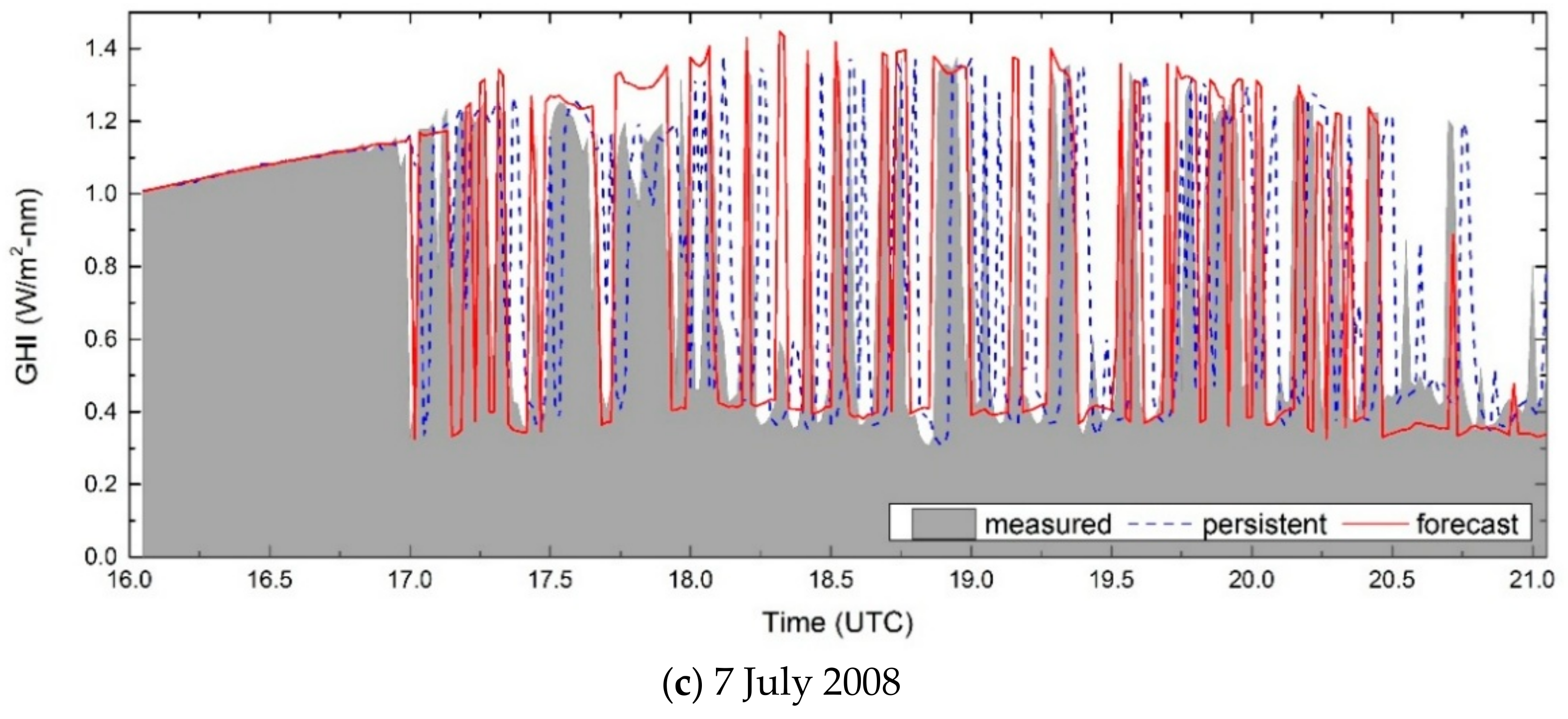
4.3. Solar Irradiance Forecast Performance
5. Conclusions
- (1)
- The prediction images were produced by image processing, which includes cloud detection, spatial transformation of TSI images, and cloud motion field calculation. The non-local optical flow method was able to capture the independent velocity vector of each pixel across successive images.
- (2)
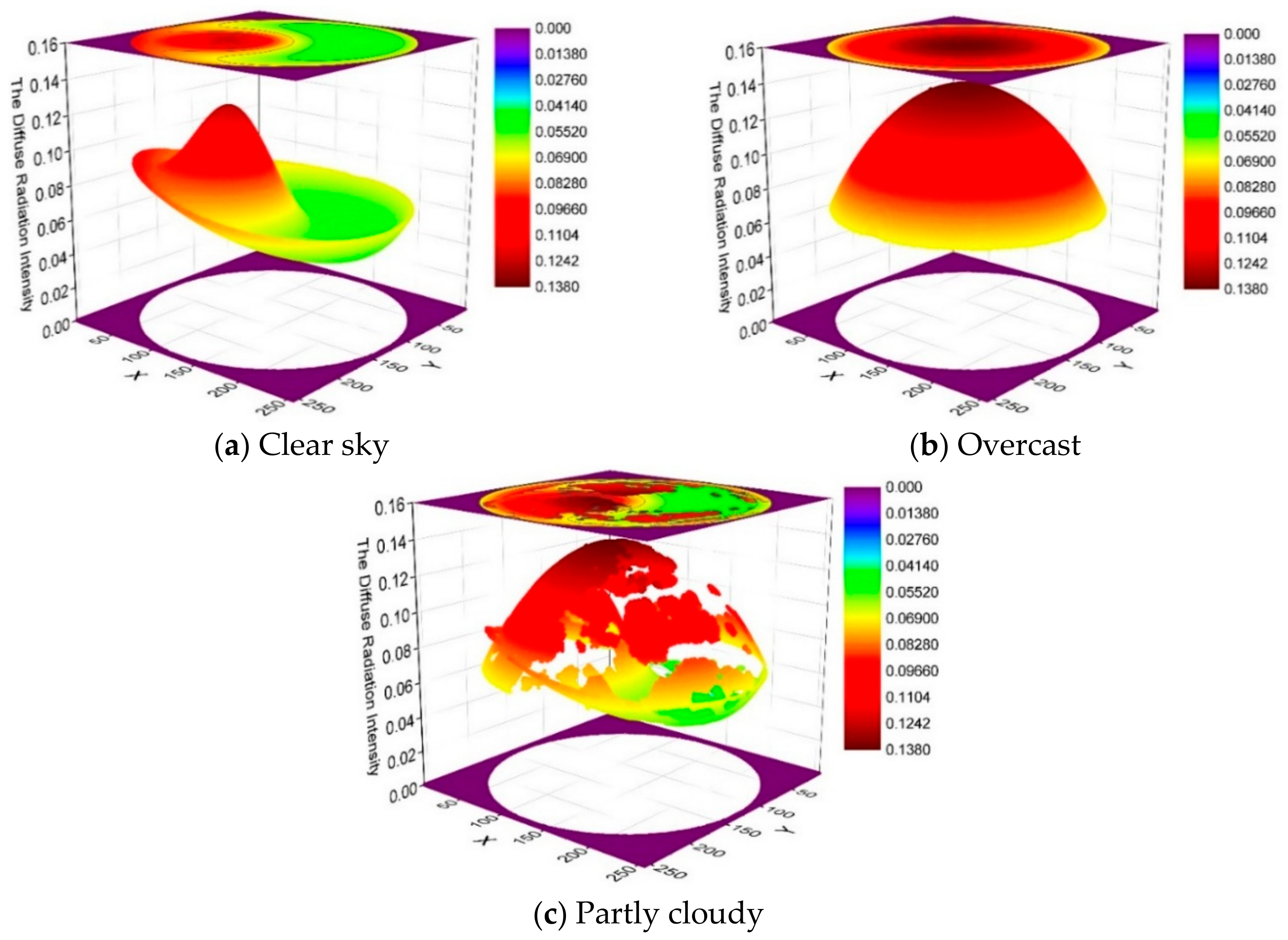
- The direct and diffuse solar irradiances simulated by the RTM were compared with in-situ measurements to determine model parameters—visibility and cloud optical depth. One of the key steps was to produce the image-based diffuse radiation intensity field under broken cloud conditions.
- (3)
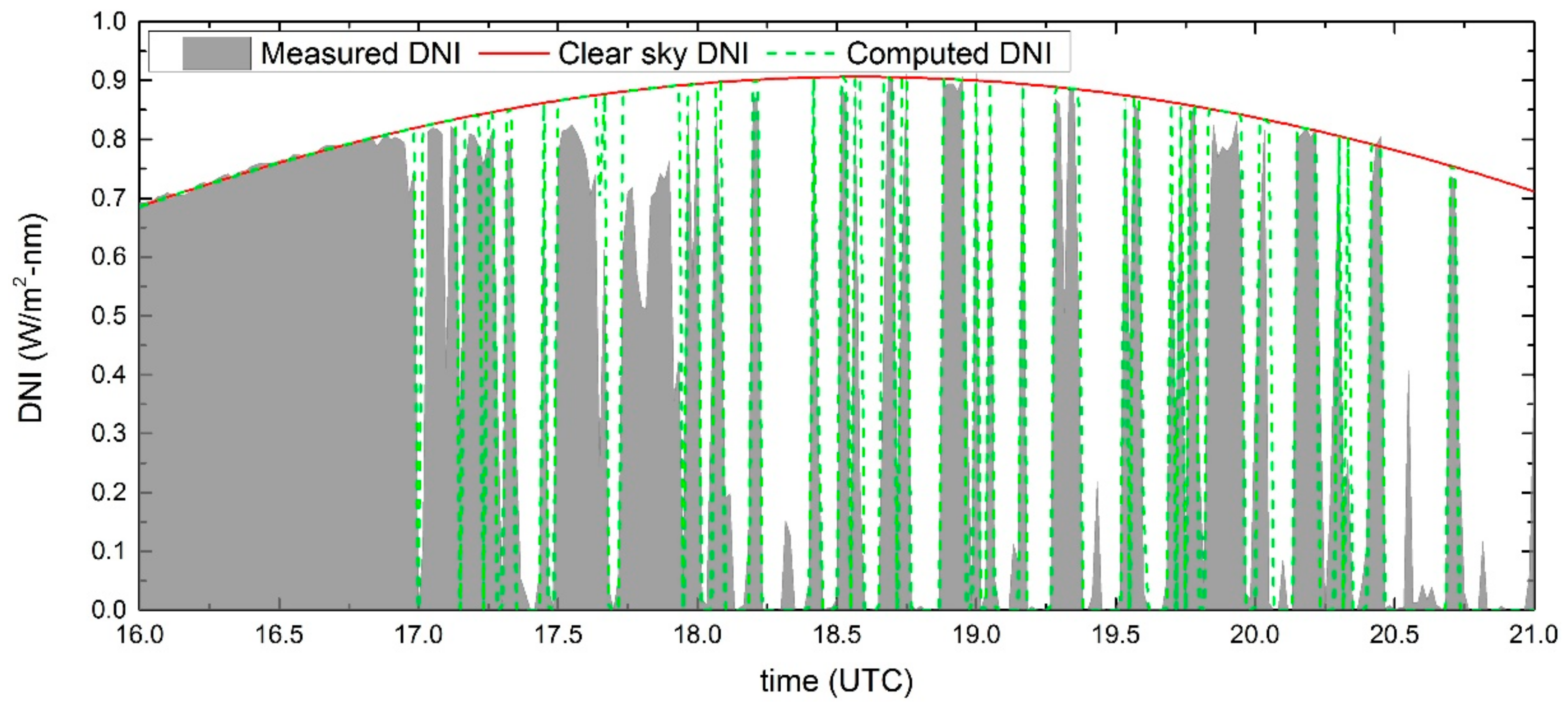
- The direct and diffuse solar irradiances were forecasted from DNI model values and the diffuse radiation intensity field with certain cloud optical depths obtained from the RTM and corresponding cloud prediction images.
Author Contributions
Acknowledgments
Conflicts of Interest
Nomenclature
| AFGL | Air Force Geophysics Laboratory |
| ANN | Artificial Neural Network |
| ARM | Atmospheric Radiation Measurement |
| BA | Black and Anandan method |
| CCD | Charge Coupled Device |
| DISORT | Discrete Ordinates Radiative Transfer Program |
| DHI | Diffuse Horizontal Irradiance |
| DNI | Direct Normal Irradiance |
| FWHM | Full Width Half Maximum |
| GHI | Global Horizontal Irradiance |
| GNC | Graduated non-convexity |
| HS | Horn and Schunck method |
| kNN | k-Nearest Neighbor |
| MAE | Mean Absolute Error |
| MFRSR | Multifilter Rotating Shadowband Radiometer |
| MODTRAN | Moderate Resolution Atmospheric Transmission |
| NWP | Numerical Weather Prediction |
| PIV | Particle Image Velocimetry |
| RMSE | Root Mean Square Error |
| RTM | Radiative Transfer Model |
| ROF | Rudin–Osher–Fatemi model |
| SGP | Southern Great Plains |
| SVM | Support Vector Machine |
| TSI | Total Sky Imager |
| UTC | Coordinated Universal Time |
| cld | Overcast condition |
| clr | Clear-sky condition |
| CF | Cloud fraction |
| F | Solar irradiance |
| n | Number of instances |
| s | Forecast skill |
| t | Time instance |
| Forecast time horizon | |
| r | Radial distance |
| u | Horizontal components of velocity vector |
| v | Vertical components of velocity vector |
| Zenith angle | |
| Azimuth angle |
References
- Perez, R.; Lorenz, E.; Pelland, S.; Beauharnois, M.; Van Knowe, G.; Hemker, K.; Heinemann, D.; Remund, J.; Muller, S.C.; Traunmuller, W.; et al. Comparison of numerical weather prediction solar irradiance forecasts in the US, Canada and Europe. Sol. Energy 2013, 94, 305–326. [Google Scholar] [CrossRef]
- Lauret, P.; David, M.; Pedro, H.T.C. Probabilistic solar forecasting using quantile regression models. Energies 2017, 10, 1591. [Google Scholar] [CrossRef]
- Kidd, C.; Levizzani, V.; Bauer, P. A review of satellite meteorology and climatology at the start of the twenty-first century. Prog. Phys. Geogr. 2009, 33, 474–489. [Google Scholar] [CrossRef]
- Marquez, R.; Pedro, H.T.C.; Coimbra, C.F.M. Hybrid solar forecasting method uses satellite imaging and ground telemetry as inputs to ANNs. Sol. Energy 2013, 92, 176–188. [Google Scholar] [CrossRef]
- Barbieri, F.; Rajakaruna, S.; Ghosh, A. Very short-term photovoltaic power forecasting with cloud modeling: A review. Renew. Sustain. Energy Rev. 2017, 75, 242–263. [Google Scholar] [CrossRef]
- Matuszko, D. Influence of the extent and genera of cloud cover on solar radiation intensity. Int. J. Climatol. 2012, 32, 2403–2414. [Google Scholar] [CrossRef]
- Inman, R.H.; Pedro, H.T.C.; Coimbra, C.F.M. Solar forecasting methods for renewable energy integration. Prog. Energy Combust. 2013, 39, 535–576. [Google Scholar] [CrossRef]
- Chow, C.W.; Urquhart, B.; Lave, M.; Dominguez, A.; Kleissl, J.; Shields, J.; Washom, B. Intra-hour forecasting with a total sky imager at the UC San Diego solar energy testbed. Sol. Energy 2011, 85, 2881–2893. [Google Scholar] [CrossRef]
- Marquez, R.; Coimbra, C.F.M. Intra-hour DNI forecasting based on cloud tracking image analysis. Sol. Energy 2013, 91, 327–336. [Google Scholar] [CrossRef]
- Bone, V.; Pidgeon, J.; Kearney, M.; Veeraragavan, A. Intra-hour direct normal irradiance forecasting through adaptive clear-sky modelling and cloud tracking. Sol. Energy 2018, 159, 852–867. [Google Scholar] [CrossRef]
- Quesada-Ruiz, S.; Chu, Y.; Tovar-Pescador, J.; Pedro, H.T.C.; Coimbra, C.F.M. Cloud-tracking methodology for intra-hour DNI forecasting. Sol. Energy 2014, 102, 267–275. [Google Scholar] [CrossRef]
- Wang, F.; Mi, Z.Q.; Su, S.; Zhao, H.S. Short-term solar irradiance forecasting model based on artificial neural network using statistical feature parameters. Energies 2012, 5, 1355–1370. [Google Scholar] [CrossRef]
- Chu, Y.H.; Pedro, H.T.C.; Nonnenmacher, L.; Inman, R.H.; Liao, Z.Y.; Coimbra, C.F.M. A smart image-based cloud detection system for intrahour solar irradiance forecasts. J. Atmos. Ocean. Technol. 2014, 31, 1995–2007. [Google Scholar] [CrossRef]
- Long, H.; Zhang, Z.J.; Su, Y. Analysis of daily solar power prediction with data-driven approaches. Appl. Energy 2014, 126, 29–37. [Google Scholar] [CrossRef]
- Cheng, H.Y.; Yu, C.C.; Lin, S.J. Bi-model short-term solar irradiance prediction using support vector regressors. Energy 2014, 70, 121–127. [Google Scholar] [CrossRef]
- Wei, C.C. Predictions of surface solar radiation on tilted solar panels using machine learning models: A case study of Tainan city, Taiwan. Energies 2017, 10, 1660. [Google Scholar] [CrossRef]
- Pedro, H.T.C.; Coimbra, C.F.M. Nearest-neighbor methodology for prediction of intra-hour global horizontal and direct normal irradiances. Renew. Energy 2015, 80, 770–782. [Google Scholar] [CrossRef]
- Min, Q.L.; Joseph, E.; Duan, M.Z. Retrievals of thin cloud optical depth from a multifilter rotating shadowband radiometer. J. Geophys. Res. Atmos. 2004, 109, D02201. [Google Scholar] [CrossRef]
- Data Sources. Available online: https://www.arm.gov/data/data-sources (accessed on 20 April 2018).
- Harrison, L.; Michalsky, J.; Berndt, J. Automated multifilter rotating shadow-band radiometer—An instrument for optical depth and radiation measurements. Appl. Opt. 1994, 33, 5118–5125. [Google Scholar] [CrossRef] [PubMed]
- Min, Q.L.; Wang, T.H.; Long, C.N.; Duan, M.Z. Estimating fractional sky cover from spectral measurements. J. Geophys. Res. Atmos. 2008, 113, D20208. [Google Scholar] [CrossRef]
- Yang, J.; Lu, W.T.; Ma, Y.; Yao, W. An automated cirrus cloud detection method for a ground-based cloud image. J. Atmos. Ocean. Technol. 2012, 29, 527–537. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Yang, J.; Min, Q.; Lu, W.; Yao, W.; Ma, Y.; Du, J.; Lu, T.; Liu, G. An automated cloud detection method based on the green channel of total-sky visible images. Atmos. Meas. Tech. 2015, 8, 4671–4679. [Google Scholar] [CrossRef]
- Montero, R.S.; Bribiesca, E. State of the art of compactness and circularity measures. Int. Math. Forum 2009, 4, 1305–1335. [Google Scholar]
- Horn, B.K.P.; Schunck, B.G. Determining optical-flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef]
- Black, M.J.; Anandan, P. The robust estimation of multiple motions: Parametric and piecewise-smooth flow fields. Comput. Vis. Image Underst. 1996, 63, 75–104. [Google Scholar] [CrossRef]
- Sun, D.Q.; Roth, S.; Black, M.J. A quantitative analysis of current practices in optical flow estimation and the principles behind them. Int. J. Comput. Vis. 2014, 106, 115–137. [Google Scholar] [CrossRef]
- Reda, I.; Andreas, A. Solar position algorithm for solar radiation applications. Sol. Energy 2004, 76, 577–589. [Google Scholar] [CrossRef]
- Min, Q.L.; Harrison, L.C. An adjoint formulation of the radiative transfer method. Geophys. Res. Atmos. 1996, 101, 1635–1640. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DNI | DHI | GHI | |
|---|---|---|---|
| 20 June 2008 | 0.037 | 0.014 | 0.039 |
| 21 June 2008 | 0.043 | 0.033 | 0.064 |
| 7 July 2008 | 0.073 | 0.032 | 0.088 |
| Forecast Horizon | 20 June 2008 | 21 June 2008 | 7 July 2008 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Presented Model | Persistence Model | Presented Model | Persistence Model | Presented Model | Persistence Model | |||||||
| RMSE | MAE | RMSE | MAE | RMSE | MAE | RMSE | MAE | RMSE | MAE | RMSE | MAE | |
| 1 | 0.196 | 0.074 | 0.206 | 0.082 | 0.226 | 0.095 | 0.270 | 0.131 | 0.346 | 0.193 | 0.349 | 0.200 |
| 2 | 0.217 | 0.085 | 0.254 | 0.113 | 0.257 | 0.124 | 0.293 | 0.144 | 0.316 | 0.171 | 0.432 | 0.280 |
| 3 | 0.240 | 0.098 | 0.272 | 0.123 | 0.280 | 0.139 | 0.339 | 0.181 | 0.321 | 0.175 | 0.461 | 0.305 |
| 4 | 0.241 | 0.098 | 0.278 | 0.129 | 0.287 | 0.143 | 0.379 | 0.217 | 0.379 | 0.218 | 0.487 | 0.328 |
| 5 | 0.237 | 0.097 | 0.275 | 0.129 | 0.301 | 0.156 | 0.403 | 0.240 | 0.388 | 0.226 | 0.502 | 0.348 |
| 6 | 0.265 | 0.120 | 0.274 | 0.125 | 0.326 | 0.174 | 0.427 | 0.265 | 0.419 | 0.253 | 0.495 | 0.344 |
| 7 | 0.266 | 0.122 | 0.272 | 0.124 | 0.334 | 0.178 | 0.436 | 0.273 | 0.441 | 0.273 | 0.479 | 0.325 |
| 8 | 0.280 | 0.130 | 0.285 | 0.137 | 0.337 | 0.178 | 0.452 | 0.292 | 0.442 | 0.277 | 0.480 | 0.324 |
| 9 | 0.289 | 0.142 | 0.319 | 0.154 | 0.353 | 0.193 | 0.467 | 0.305 | 0.424 | 0.260 | 0.477 | 0.327 |
| 10 | 0.285 | 0.136 | 0.327 | 0.160 | 0.360 | 0.197 | 0.472 | 0.309 | 0.448 | 0.280 | 0.486 | 0.334 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, J.; Min, Q.; Zhang, P.; Guo, J.; Yang, J.; Yin, B. Short-Term Solar Irradiance Forecasts Using Sky Images and Radiative Transfer Model. Energies 2018, 11, 1107. https://doi.org/10.3390/en11051107
Du J, Min Q, Zhang P, Guo J, Yang J, Yin B. Short-Term Solar Irradiance Forecasts Using Sky Images and Radiative Transfer Model. Energies. 2018; 11(5):1107. https://doi.org/10.3390/en11051107
Chicago/Turabian StyleDu, Juan, Qilong Min, Penglin Zhang, Jinhui Guo, Jun Yang, and Bangsheng Yin. 2018. "Short-Term Solar Irradiance Forecasts Using Sky Images and Radiative Transfer Model" Energies 11, no. 5: 1107. https://doi.org/10.3390/en11051107
APA StyleDu, J., Min, Q., Zhang, P., Guo, J., Yang, J., & Yin, B. (2018). Short-Term Solar Irradiance Forecasts Using Sky Images and Radiative Transfer Model. Energies, 11(5), 1107. https://doi.org/10.3390/en11051107