State-of-Charge Balancing Control of a Modular Multilevel Converter with an Integrated Battery Energy Storage


Abstract
:1. Introduction
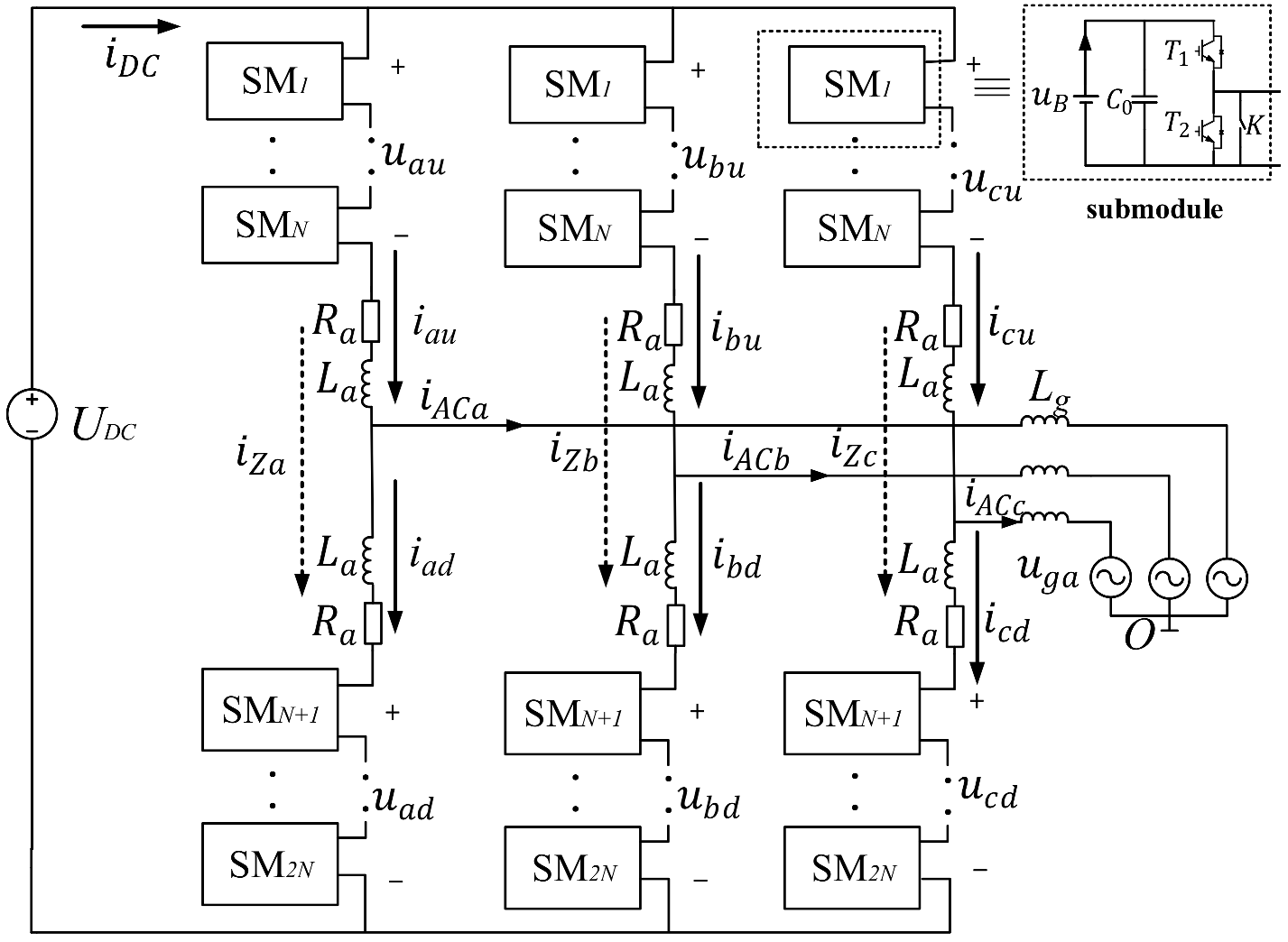
2. Operating Principles
2.1. Topology and Modulation Strategy
2.2. Power Flow Analysis
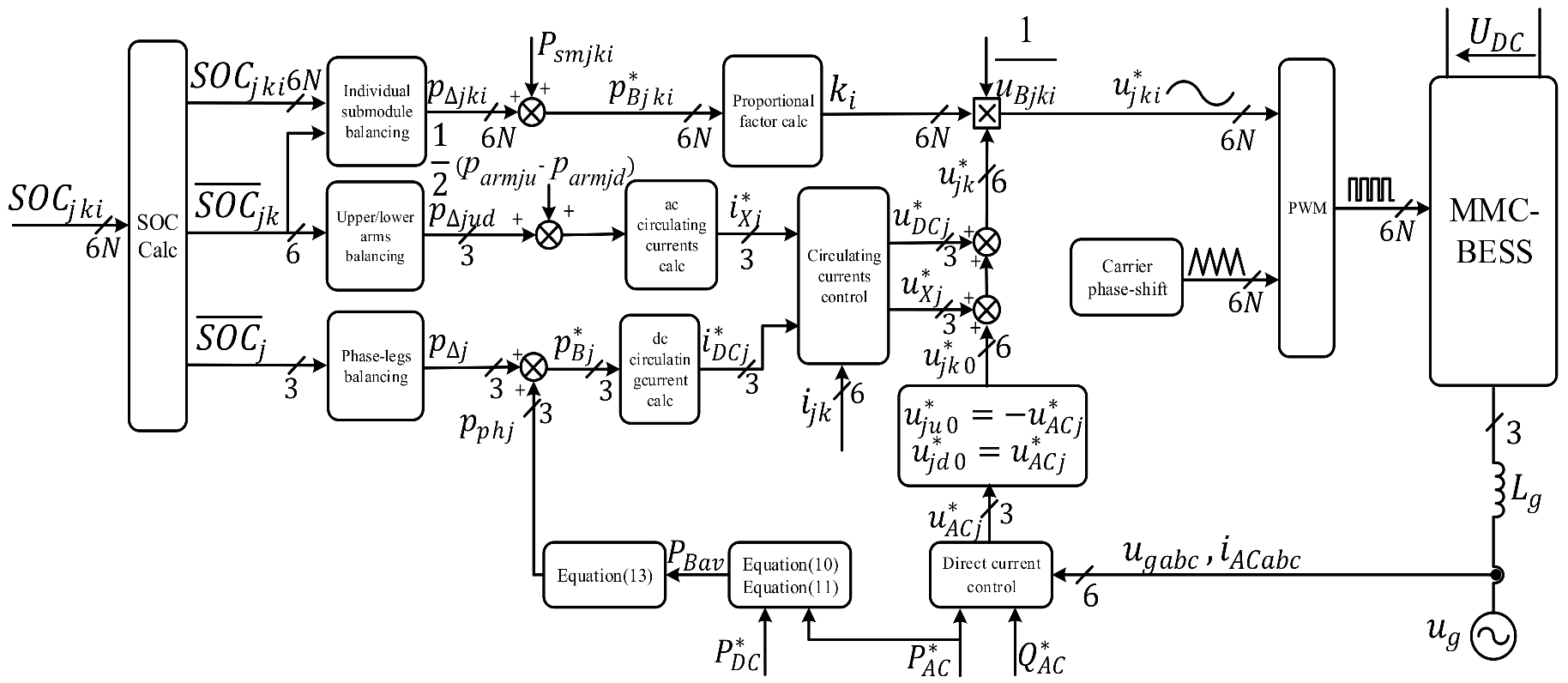
3. SOC Balancing Control Strategy
3.1. Phase-Leg Balancing
3.2. Upper and Lower Arm Balancing
3.3. Submodule Balancing
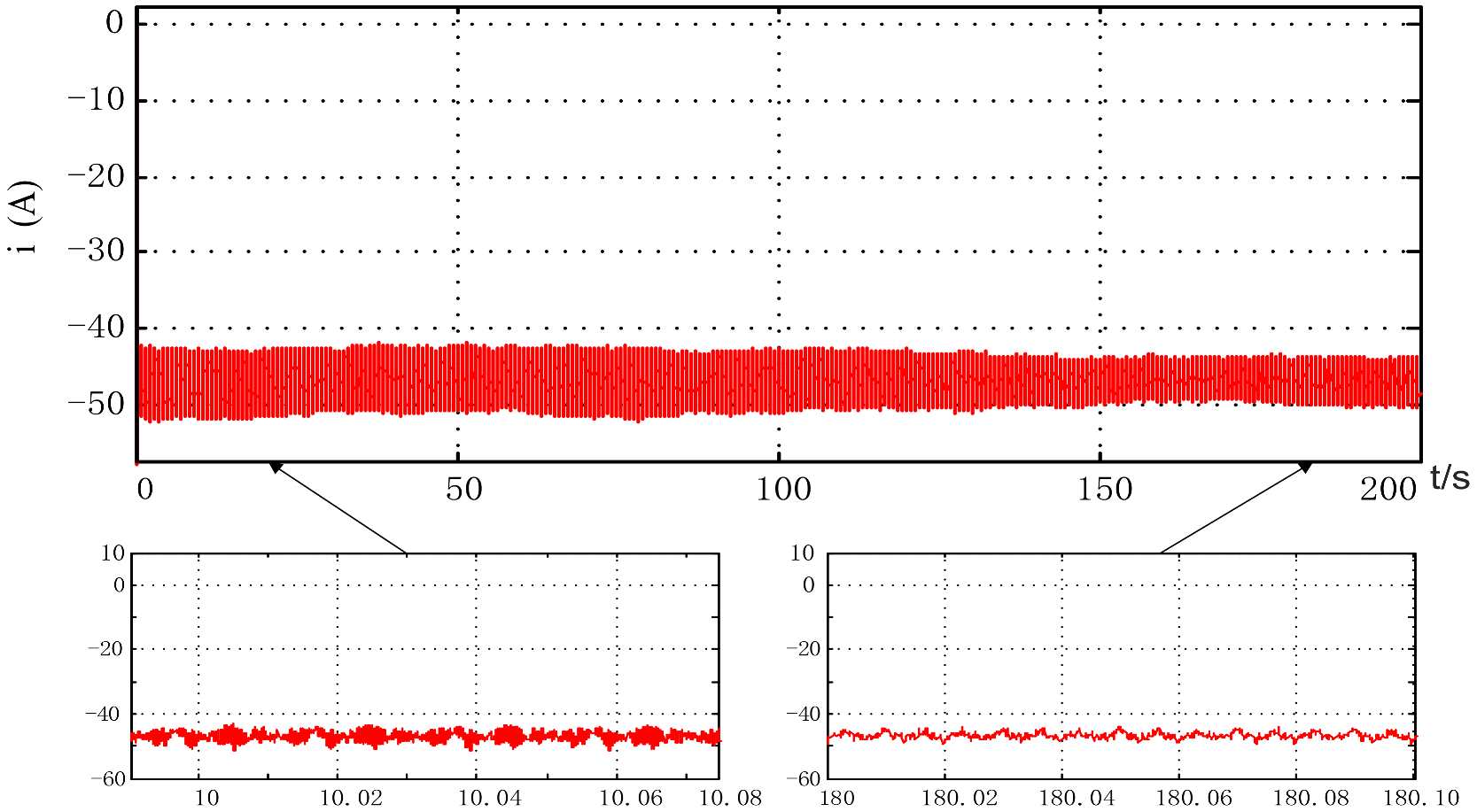
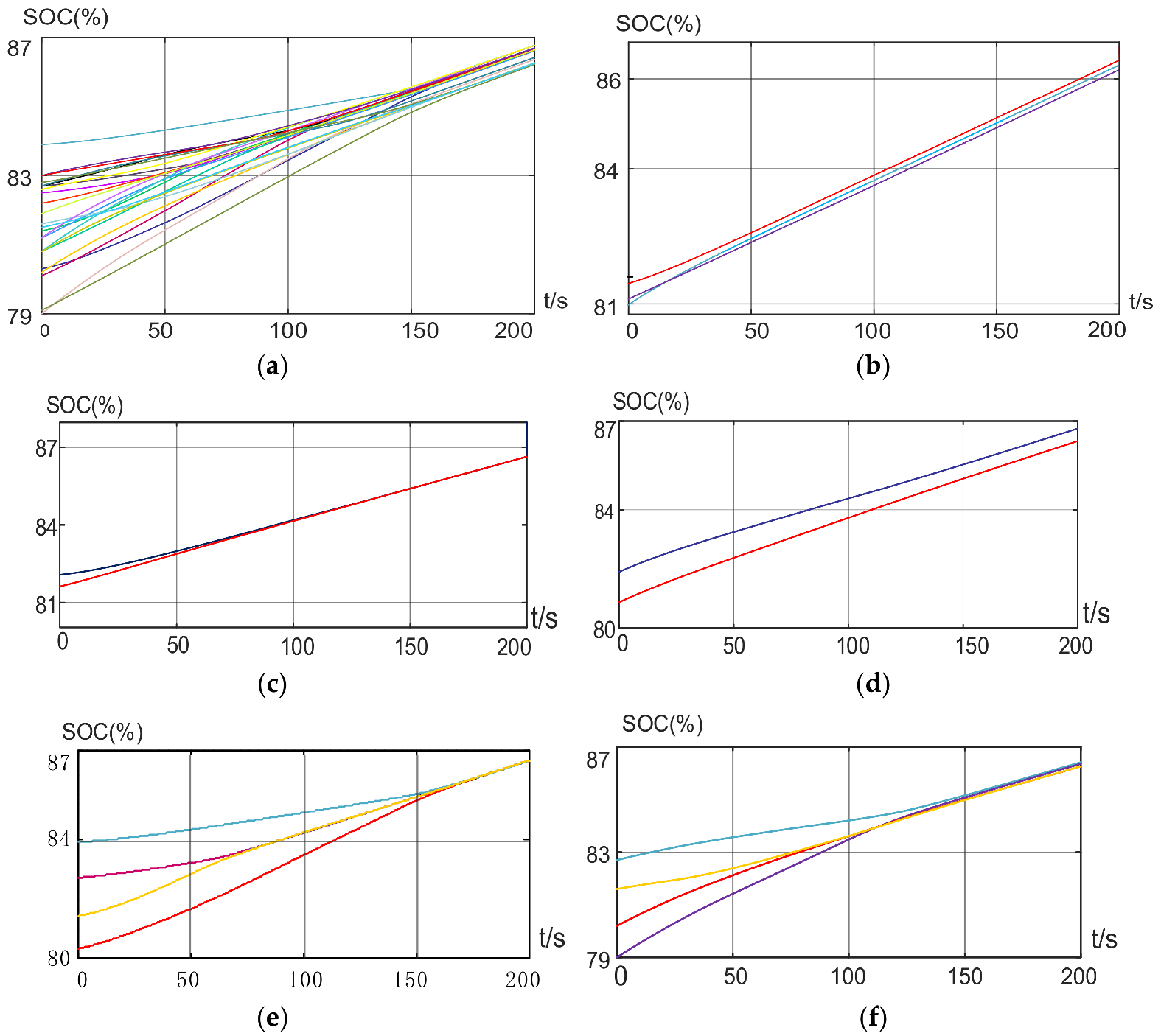
4. Simulation Results
5. Experimental Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| MMC | Modular Multilevel Converter |
| SOC | State of Charge |
| BESS | Battery Energy Storage System |
| HVDC | High-voltage Direct Current |
| PWM | Pulse Width Modulation |
References
- Neubauer, J.; Pesaran, A. The ability of battery second use strategies to impact plug-in electric vehicle prices and serve utility energy storage applications. J. Power Sources 2011, 196, 10351–10358. [Google Scholar] [CrossRef]
- Diao, W.; Jiang, J. Flexible Grouping for Enhanced Energy Utilization Efficiency in Battery Energy Storage Systems. Energies 2016, 9, 498. [Google Scholar] [CrossRef]
- Diao, W.; Xue, N. Active battery cell equalization based on residual available energy maximization. Applied Energy 2018, 15, 690–698. [Google Scholar] [CrossRef]
- Li, Q.; Liang, H. Modular Battery Energy Storage System Based on One Integrated Primary multi-Secondaries Transformer and its Independent Control Strategy. In Proceedings of the IEEE Transportation Electrification Conference and Expo, (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017. [Google Scholar]
- Song, J.; Zhang, W. Fault-Tolerant Control for a Flexible Group Battery Energy Storage System Based on Cascaded Multilevel Converters. Energies 2018, 11, 171. [Google Scholar] [CrossRef]
- Maharjan, L.; Yamagishi, T. Active-Power Control of Individual Converter Cells for a Battery Energy Storage System Based on a Multilevel Cascade PWM Converter. IEEE Trans. Power Electron. 2012, 27, 1099–1107. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Zabihi, S.; Vechiu, I.; Catalão, J.P. A multi-loop control technique for the stable operation of modular multilevel converters in HVDC transmission systems. Int. J. Electr. Power Energy Syst. 2018, 96, 194–207. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Taheri, S.; Vechiu, I.; Catalão, J.P. Novel Control Strategy for Modular Multilevel Converters Based on Differential Flatness Theory. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 99, 1–11. [Google Scholar] [CrossRef]
- Mei, J.; Xiao, B.; Shen, K.; Tolbert, L.M.; Zheng, J.Y. Modular Multilevel Inverter with New Modulation Method and Its Application to Photovoltaic Grid-Connected Generator. IEEE Trans. Power Electron. 2013, 28, 5063–5073. [Google Scholar] [CrossRef]
- Meshram, P.M.; Borghate, V.B. A Simplified Nearest Level Control (NLC) (NLC) Voltage Balancing Method for Modular Multilevel Converter (MMC). IEEE Trans. Power Electron. 2015, 30, 450–462. [Google Scholar] [CrossRef]
- Vasiladiotis, M.; Rufer, A. Analysis and Control of Modular Multilevel Converters With Integrated Battery Energy Storage. IEEE Trans. Power Electron. 2015, 30, 163–175. [Google Scholar] [CrossRef]
- Quraan, M.; Yeo, T. Design and Control of Modular Multilevel Converters for Battery Electric Vehicles. IEEE Trans. Power Electron. 2015, 31, 507–517. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, F. Interlinking modular multilevel converter of hybrid AC-DC distribution system with integrated battery energy storage. In Proceedings of the Energy Conversion Congress and Exposition, Montreal, QC, Canada, 20–24 September 2015; pp. 70–77. [Google Scholar]
- Quraan, M.; Tricoli, P.; D’Arco, S.; Piegari, L. Efficiency Assessment of Modular Multilevel Converters for Battery Electric Vehicles. IEEE Trans. Power Electron. 2016, 32, 2041–2051. [Google Scholar] [CrossRef]
- Diao, W.; Jiang, J.; Zhang, C.; Liang, H. Energy state of health estimation for battery packs based on the degradation and inconsistency. Energy Procedia 2017, 142, 6581–6591. [Google Scholar] [CrossRef]
- Hillers, A.; Biela, J. Fault-tolerant operation of the modular multilevel converter in an energy storage system based on split batteries. In Proceedings of the European Conference on Power Electronics and Applications, Lappeenranta, Finland, 26–28 August 2014; pp. 1–8. [Google Scholar]
- Chen, Q.; Li, R. Analysis and Fault Control of Hybrid Modular Multilevel Converter with Integrated Battery Energy Storage System. IEEE J. Emrg. Sel. Top. Power Electron. 2017, 5, 64–79. [Google Scholar] [CrossRef]
- Ma, Y.J.; Lin, H.; Wang, Z.; Wang, T. Capacitor voltage balancing control of modular multilevel converters with energy storage system by using carrier phase-shifted modulation. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Tampa, FL, USA, 26–30 March 2017; pp. 1821–1828. [Google Scholar]
- Tu, Q.; Xu, Z. Mechanism analysis on the circulating current in modular multilevel converter based HVDC. High Volt. Eng. 2010, 36, 547–552. (In Chinese) [Google Scholar]
- Soong, T.; Lehn, P. Internal Power Flow of a Modular Multilevel Converter with Distributed Energy Resources. Emerg. Sel. Top. Power Electron. IEEE J. 2014, 2, 1127–1138. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | |
|---|---|---|
| Output voltage (phase, peak) | 311 V | |
| DC-link voltage | 750 V | |
| Arm inductance | 1 mH | |
| Submodules in one arm | N | 4 |
| Equivalent series resistance | R | 0.1 |
| Grid inductance | Lg | 1.5 mH |
| Submodule capacitance | 2200 | |
| Nominal battery voltage | 250 V | |
| Nominal battery capacity | 10 Ah | |
| Switching Frequency | 5000 Hz | |
| Phase | Arm | Submodules SOC and Capacity(Ah) | Mean SOC/Capacity(Ah) | Mean SOC/Capacity(Ah) | |||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | ||||
| a | u | 80.7%/8 | 80.3%/8 | 82.9%/8 | 81.4%/8 | 81.325%/8 | 80.975%/8 |
| d | 80.1%/8 | 81.2%/8 | 80.7%/8 | 80.5%/8 | 80.625%/8 | ||
| b | u | 82.7%/10 | 80.0%/11 | 80.2%/13 | 81.6%/14 | 81.125%/12 | 81.388%/10 |
| d | 80.8%/8 | 81.2%/8 | 82.6%/8 | 82.0%/8 | 81.65%/8 | ||
| c | u | 81.8%/10 | 83.0%/10 | 82.2%/10 | 81.9%/10 | 82.225%/10 | 81.763%/12 |
| d | 81.8%/14 | 81.1%/14 | 80.8%/14 | 81.5%/14 | 81.3%/14 | ||
| Item | Value | |
|---|---|---|
| Output voltage (phase, peak) | 65 V | |
| DC-link voltage | 180 V | |
| Arm inductance | 1 mH | |
| Grid inductance | Lg | 0.6 mH |
| Submodule capacitance | 2200 | |
| Nominal battery voltage | 45 V | |
| Switching Frequency | 5000 Hz | |
| Battery Pack Capacity | 6 AH | |
| Battery Type | ternary lithium battery | |
| Battery Pack Grouping Method | 12 series 2 parallel | |
| Rated Battery Pack Voltage | 44 V | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Guo, L.; Song, J.; Yang, Y.; Zhang, W.; Qi, H. State-of-Charge Balancing Control of a Modular Multilevel Converter with an Integrated Battery Energy Storage. Energies 2018, 11, 873. https://doi.org/10.3390/en11040873
Liang H, Guo L, Song J, Yang Y, Zhang W, Qi H. State-of-Charge Balancing Control of a Modular Multilevel Converter with an Integrated Battery Energy Storage. Energies. 2018; 11(4):873. https://doi.org/10.3390/en11040873
Chicago/Turabian StyleLiang, Hui, Long Guo, Junhong Song, Yong Yang, Weige Zhang, and Hongfeng Qi. 2018. "State-of-Charge Balancing Control of a Modular Multilevel Converter with an Integrated Battery Energy Storage" Energies 11, no. 4: 873. https://doi.org/10.3390/en11040873
APA StyleLiang, H., Guo, L., Song, J., Yang, Y., Zhang, W., & Qi, H. (2018). State-of-Charge Balancing Control of a Modular Multilevel Converter with an Integrated Battery Energy Storage. Energies, 11(4), 873. https://doi.org/10.3390/en11040873