A Superconducting Induction Motor with a High Temperature Superconducting Armature: Electromagnetic Theory, Design and Analysis


Abstract
1. Introduction
2. Electromagnetic Design of High Temperature Superconducting Induction Motor
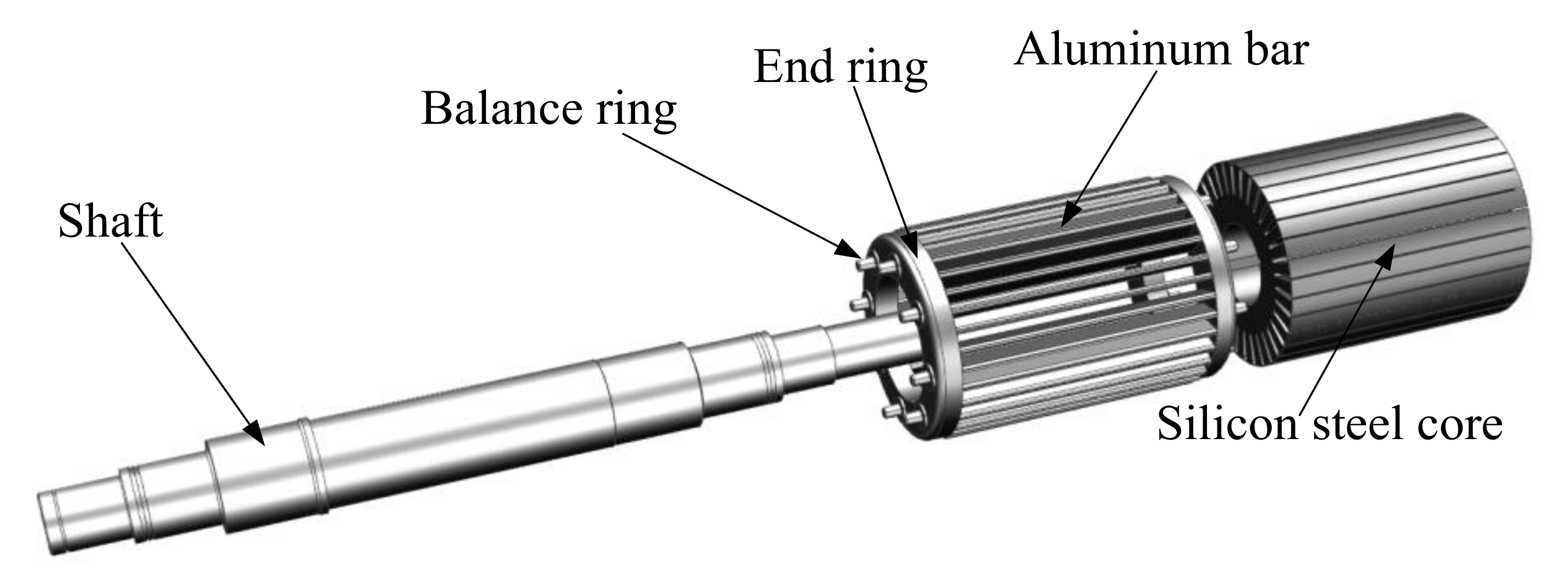
2.1. Rotor Structure Design
2.2. Stator Design
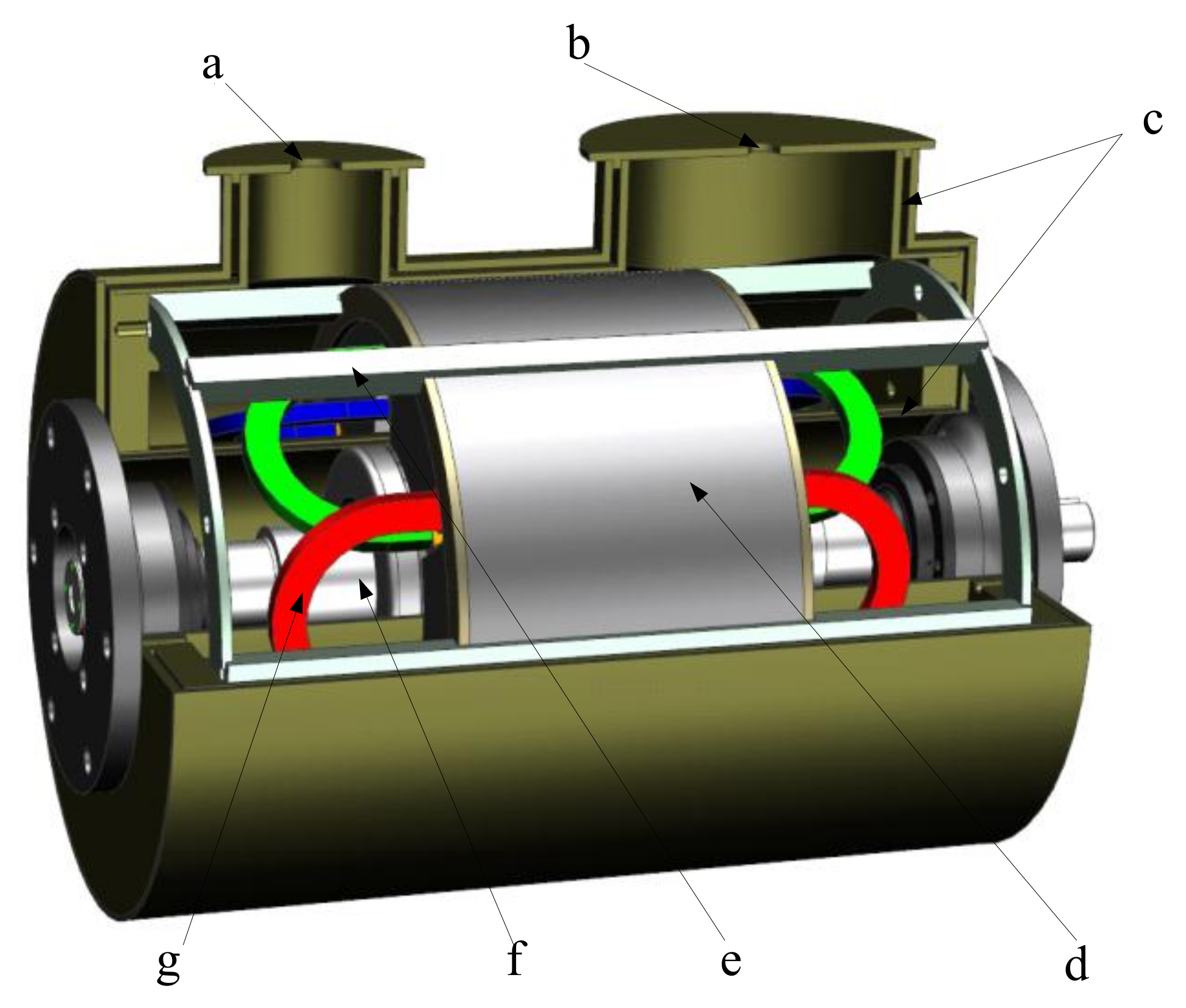
2.3. Cryogenic Cooling System Design
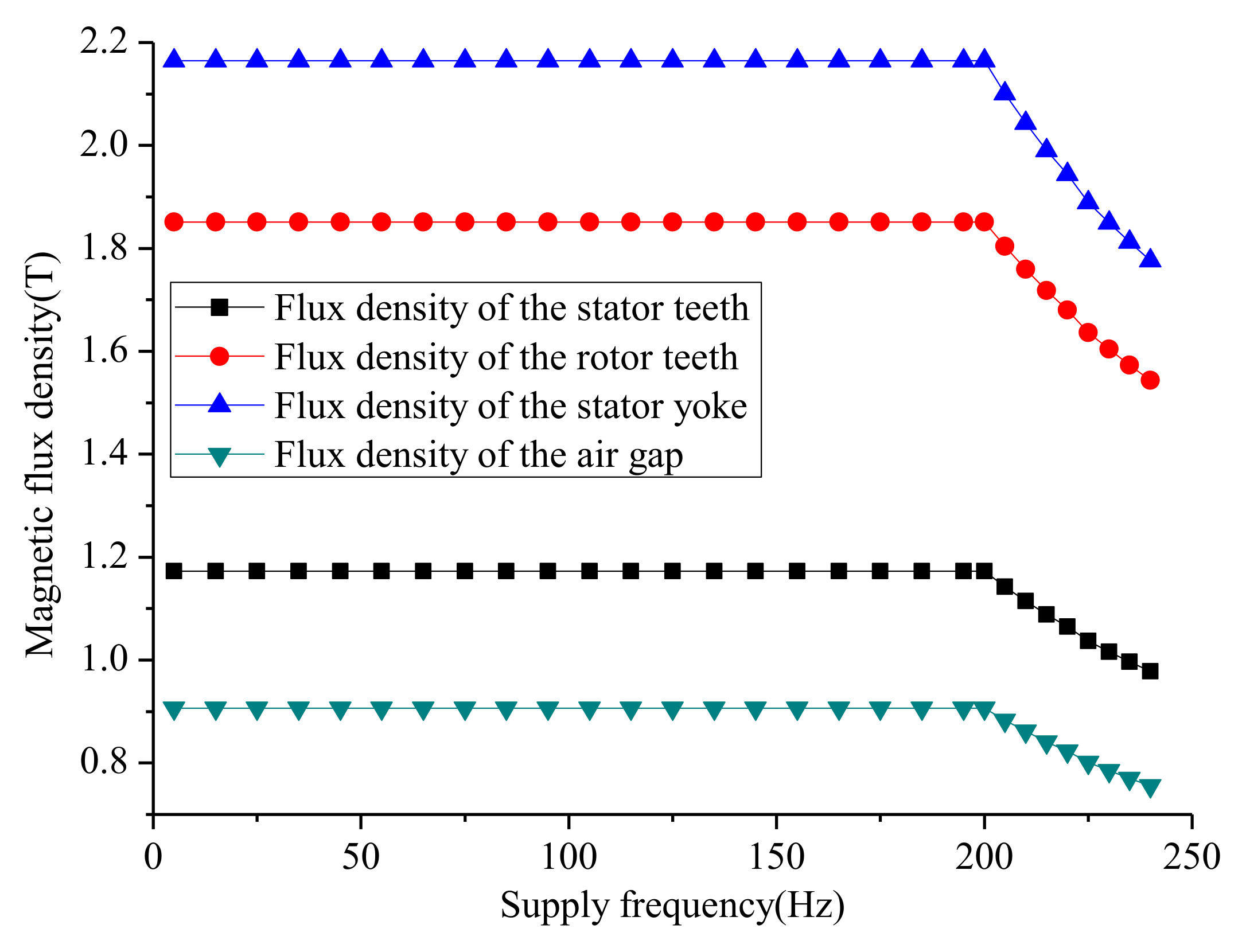
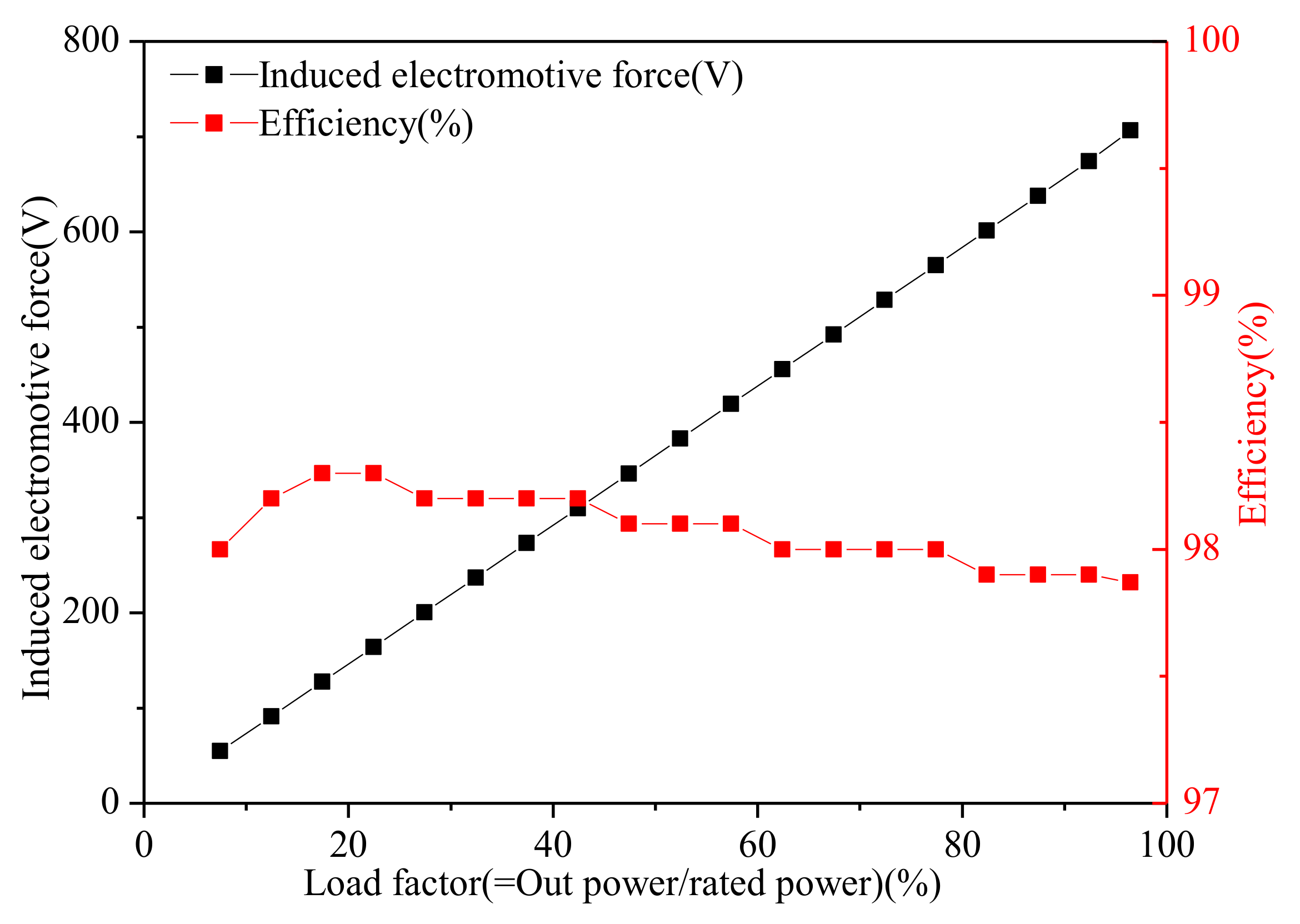
3. Predicted Electrical Performance of High Temperature Superconducting Induction Motor
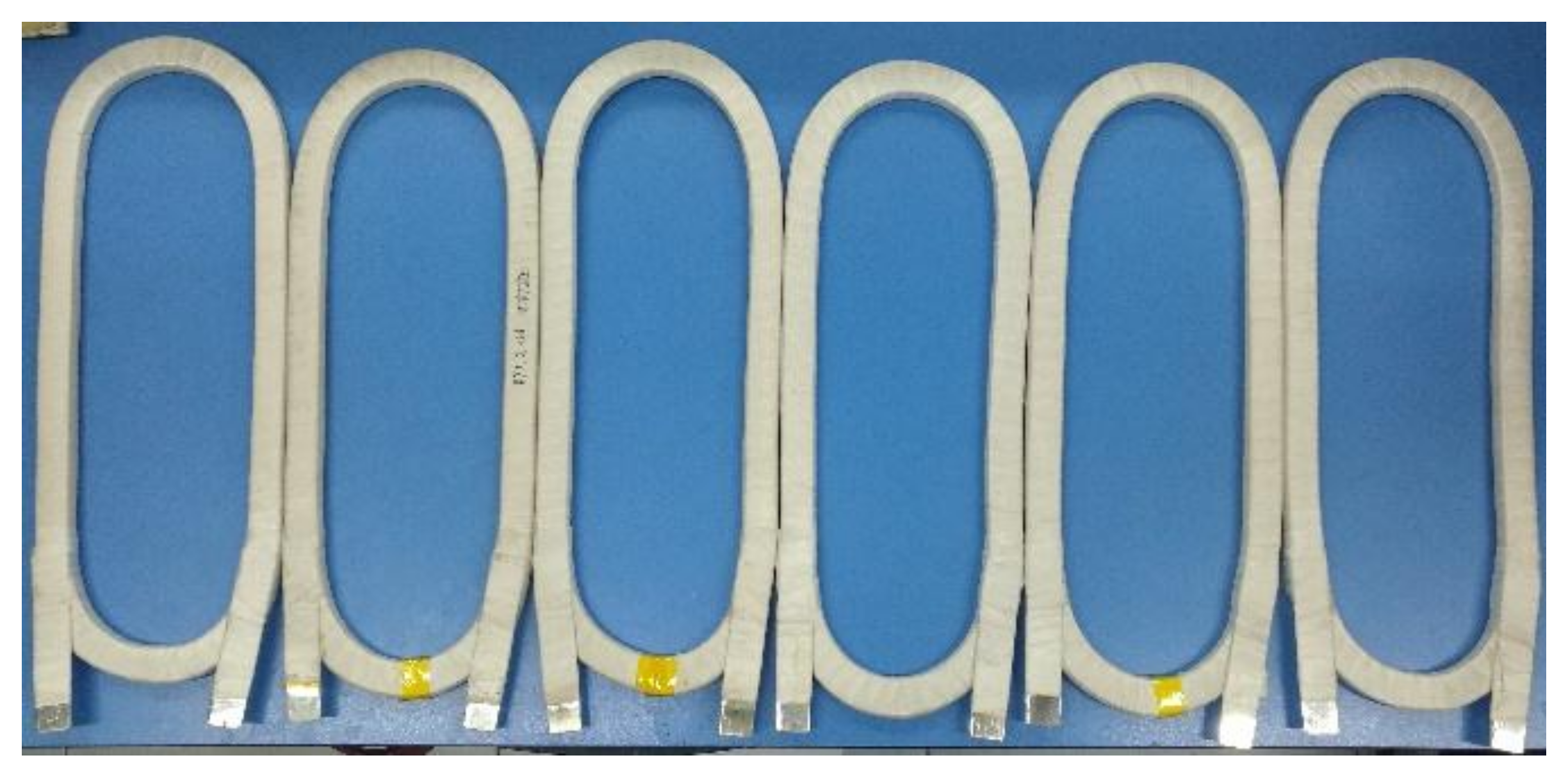
4. Fabrication
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Haran, K.S.; Kalsi, S.; Arndt, T.; Karmaker, H.; Badcock, R.; Buckley, B.; Haugan, T.; Izumi, M.; Loder, D.; Bray, J.W.; et al. High power density superconducting rotating machines—Development status and technology roadmap. Supercond. Sci. Technol. 2017, 30, 123002. [Google Scholar] [CrossRef]
- Kashani, M.; Hosseina, M.; Darabi, A. Design of Synchronous Motor with High-temperature Superconductive Field Windings for Marine Propulsion Applications. Electr. Power Compon. Syst. 2013, 41, 413–426. [Google Scholar] [CrossRef]
- Masson, P.J.; Ratelle, K.; Delobel, P.A.; Lipardi, A.; Lorin, C. Development of a 3D Sizing Model for All-Superconducting Machines for Turbo-Electric Aircraft Propulsion. IEEE Trans. Appl. Supercond. 2013, 23, 3600805. [Google Scholar] [CrossRef]
- Kajikawa, K.; Uchida, Y.; Nakamura, T.; Kobayashi, H.; Wakuda, T.; Tanaka, K. Development of Stator Windings for Fully Superconducting Motor with MgB2 Wires. IEEE Trans. Appl. Supercond. 2013, 23, 5201604. [Google Scholar] [CrossRef]
- Dombrovski, V.; Driscoll, D.; Shoykhet, B.A.; Umans, S.D.; Zevchek, J.K. Design and Testing of a 1000-hp High-Temperature Superconducting Motor. IEEE Trans. Energy Convers. 2005, 20, 638–643. [Google Scholar] [CrossRef]
- Hull, J.R.; Strasik, M. Concepts for using trapped-flux bulk high-temperature superconductor in motors and generators. Supercond. Sci. Technol. 2010, 23, 12400512. [Google Scholar] [CrossRef]
- Lee, S.H.; Hong, J.P.; Kwon, Y.K.; Jo, Y.S.; Baik, S.K. Study on homopolar superconductivity synchronous motors for ship propulsion application. IEEE Trans. Appl. Supercond. 2008, 18, 717–720. [Google Scholar]
- Da Costa Branco, P.J.; Dente, J.A. Design and Experiment of a New Maglev Design Using Zero-Field-Cooled YBCO Superconductors. IEEE Trans. Ind. Electron. 2012, 59, 4120–4127. [Google Scholar] [CrossRef]
- Jin, J.X.; Zheng, L.H.; Guo, Y.G.; Zhu, J.G. Performance Characteristics of an HTS Linear Synchronous Motor with HTS Bulk Magnet Secondary. IEEE Trans. Ind. Appl. 2011, 47, 2469–2477. [Google Scholar] [CrossRef]
- Fuger, R.; Guina, A.; Sercombe, D.; Kells, J.; Matsekh, A.; Labes, K.; Lissington, T.; Fabian, C.; Chu, G. Superconducting Motor Developments at Guina Energy Technologies. In Proceedings of the 2015 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Shanghai, China, 20–23 November 2015; pp. 362–363. [Google Scholar]
- Koshiba, Y.; Yuan, S.; Maki, N.; Izumi, M.; Umemoto, K.; Aizawa, K.; Kimura, Y.; Yokoyama, M. Critical Current and Electric Loss under Magnetic Field at 30 K on Bi-2223 Superconducting Coil for Ship Propulsion Motor. IEEE Trans. Appl. Supercond. 2011, 21, 1127–1130. [Google Scholar] [CrossRef]
- Fukui, S.; Ogawa, J.; Sato, T.; Tsukamoto, O.; Kashima, N.; Nagaya, S. Study of 10 MW-Class Wind Turbine Synchronous Generators with HTS Field Windings. IEEE Trans. Appl. Supercond. 2011, 21, 1151–1154. [Google Scholar] [CrossRef]
- Netter, D.; Leveque, J.; Ailam, E.; Douine, B.; Rezzoug, A.; Masson, P.J. Theoretical Study of a New Kind HTS Motor. IEEE Trans. Appl. Supercond. 2005, 15, 2186–2189. [Google Scholar] [CrossRef]
- Snitchler, G.; Gamble, B.; Kalsi, S.S. The Performance of a 5 MW High Temperature Superconductor Ship Propulsion Motor. IEEE Trans. Appl. Supercond. 2005, 15, 2206–2209. [Google Scholar] [CrossRef]
- Kim, J.H.; Park, S.; Le, T.D.; Jo, H.C.; Jo, Y.S.; Choi, Y.H.; Lee, H.; Kim, H.M. Analysis of the Mechanical Characteristics of a 17-MW-Class High-Temperature Superconducting Synchronous Motor. J. Supercond. Novel Magn. 2015, 28, 671–679. [Google Scholar] [CrossRef]
- Schiferl, R.; Flory, A.; Livoti, W.C.; Umans, S.D. High-temperature superconducting synchronous motors: Economic issues for industrial applications. IEEE Trans. Ind. Appl. 2008, 44, 1376–1384. [Google Scholar] [CrossRef]
- Netter, D.; Lévêque, J.; Douine, B.; Masson, P.J.; Rezzoug, A. Design and Testing of a Superconducting Rotating Machine. IEEE Trans. Appl. Supercond. 2007, 17, 27–33. [Google Scholar]
- Ikeda, K.; Nakamura, T.; Karashima, T.; Amemiya, N.; Yoshikawa, M.; Itoh, Y.; Terazawa, T.; Ohashi, Y. Hysteretic Rotating Characteristics of an HTS Induction/Synchronous Motor. IEEE Trans. Appl. Supercond. 2017, 27, 1–5. [Google Scholar] [CrossRef]
- Nakamura, T.; Nishimura, T.; Nagao, K.; Matsumura, K.; Ogama, Y. Theoretical Analysis of High Temperature Superconducting Induction/Synchronous Machine Based on the Nonlinear Electrical Equivalent Circuit. In Proceedings of the 18th International Conference on Electrical Machines IEEE, Vilamoura, Portugal, 6–9 September 2008; pp. 1855–1859. [Google Scholar]
- Nakamura, T.; Ogama, Y.; Miyake, H. Performance of Inverter Fed HTS Induction-Synchronous Motor Operated in Liquid Nitrogen. IEEE Trans. Appl. Supercond. 2007, 17, 1615–1618. [Google Scholar] [CrossRef]
- Nakamura, T.; Miyake, H.; Ogama, Y.; Morita, G.; Muta, I.; Hoshino, T. Fabrication and characteristics of HTS induction motor by the use of Bi-2223/Ag squirrel-cage rotor. IEEE Trans. Appl. Supercond. 2006, 16, 1469–1472. [Google Scholar] [CrossRef]
- Sim, J.; Lee, K.; Cha, G.; Lee, J.K. Development of a HTS Squirrel Cage Induction Motor with HTS Rotor Bars. IEEE Trans. Appl. Supercond. 2004, 14, 916–919. [Google Scholar] [CrossRef]
- Sekiguchi, D.; Nakamura, T.; Misawa, S.; Kitano, H.; Matsuo, T.; Amemiya, N.; Ito, Y.; Yoshikawa, M.; Terazawa, T.; Osamura, K.; et al. Trial Test of Fully HTS Induction/Synchronous Machine for Next Generation Electric Vehicle. IEEE Trans. Appl. Supercond. 2012, 22, 5200904. [Google Scholar] [CrossRef]
- Pyrhonen, J.; Tapani, J.; Valeria, H. Design of Rotating Electrical Machines; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Wimbush, S.; Strickland, N. A High-Temperature Superconducting (HTS) Wire Critical Current Database. Figshare. 2017. Available online: https://doi.org/10.6084/m9.figshare.c.2861821.v6 (accessed on 5 October 2017).
- van der Lana, D.C.; Daniel, C.; Ekin, J.W. Dependence of the critical current of YBa2Cu3O7-δ coated conductors on in-plane bending. Supercond. Sci. Technol. 2008, 21, 115002. [Google Scholar] [CrossRef][Green Version]
- Amemiya, N.; Jiang, Z.; Iijima, Y.; Kakimoto, K.; Saitoh, T. Total AC loss of YBCO coated conductor carrying AC transport current in AC transverse magnetic field with various orientations. Supercond. Sci. Technol. 2004, 17, 983. [Google Scholar] [CrossRef]
- Boglietti, A.; Chiampi, M.; Repetto, M.; Bottauscio, O.; Chiarabaglio, D. Loss separation analysis in ferromagnetic sheets under PWM inverter supply. IEEE Trans. Magn. 1998, 34, 1240–1242. [Google Scholar] [CrossRef]
- Aldo, B.; Cavagnino, A. Iron loss prediction with PWM supply: An overview of proposed methods from an engineering application point of view. Electr. Power Syst. Res. 2010, 80, 1121–1127. [Google Scholar]
- Boglietti, A.; Cavagnino, A.; Lazzari, M.; Pastorelli, M. Predicting iron losses in soft magnetic materials with arbitrary voltage supply: An engineering approach. IEEE Trans. Magn. 2003, 39, 981–989. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data and Parameters | Value |
|---|---|
| Outer diameter (mm) | 158 |
| Shaft diameter (mm) | 60 |
| Active core length (mm) | 200 |
| Slot number | 33 |
| Slot type | Peariform slot |
| Rated speed (rpm) | 11,995 |
| Rotor weight (kg) | 36.8 |
| Data and Parameters | Value |
|---|---|
| Width of a YBCO layer (mm) | 4.8 |
| Thickness of a YBCO tape (mm) | 0.18 |
| Ic at 77 K, self-field (A) | 100 |
| Minimum bend radius (mm) | 50 |
| Maximum rated tensile stress (MPa) | 150 |
| Maximum rated tensile strain | 0.25% |
| Data and Parameters | Value |
|---|---|
| Outer diameter (mm) | 345 |
| Inner diameter (mm) | 170 |
| Core length (mm) | 200 |
| Slot number | 6 |
| Slot type | Open slot |
| Number of parallel branches | 2 |
| Physical air-gap length (mm) | 0.6 |
| Coil turns | 100 |
| Coil straight length (L) (mm) | 250 |
| Coil height (H) (with insulation) (mm) | 11.3 |
| Coil width (W) (with insulation) (mm) | 22.5 |
| HTS material | YBCO-coated conductor |
| Cryogenic system material | Reinforced aramid fiber |
| Winding support material | Reinforced aramid fiber |
| Stator weight (kg) | 106 |
| Data and Parameters | Value |
|---|---|
| Rated power [kW] | 500 |
| Rated voltage [V] | 1600 |
| Rated frequency [Hz] | 200 |
| Rated power efficiency | 97.6% |
| Rated torque [N.m] | 38 |
| Insulation class | F or H |
| HTS magnet operating temperature [K] | Below 70 |
| Total motor weight [kg] | 151 |
| Power to weight ratio [Kw/kg] | 3.3 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Badcock, R.; Shu, H.; Fang, J. A Superconducting Induction Motor with a High Temperature Superconducting Armature: Electromagnetic Theory, Design and Analysis. Energies 2018, 11, 792. https://doi.org/10.3390/en11040792
Liu B, Badcock R, Shu H, Fang J. A Superconducting Induction Motor with a High Temperature Superconducting Armature: Electromagnetic Theory, Design and Analysis. Energies. 2018; 11(4):792. https://doi.org/10.3390/en11040792
Chicago/Turabian StyleLiu, Bin, Rod Badcock, Hang Shu, and Jin Fang. 2018. "A Superconducting Induction Motor with a High Temperature Superconducting Armature: Electromagnetic Theory, Design and Analysis" Energies 11, no. 4: 792. https://doi.org/10.3390/en11040792
APA StyleLiu, B., Badcock, R., Shu, H., & Fang, J. (2018). A Superconducting Induction Motor with a High Temperature Superconducting Armature: Electromagnetic Theory, Design and Analysis. Energies, 11(4), 792. https://doi.org/10.3390/en11040792