Solving the Multi-Objective Optimal Power Flow Problem Using the Multi-Objective Firefly Algorithm with a Constraints-Prior Pareto-Domination Approach


Abstract
1. Introduction
2. Mathematical Modeling of the MOOPF Problem
2.1. Objective Functions
2.2. Equality Constraints
2.3. Inequality Constraints
- Limits of Pg
- Limits of Vg
- Limits of T
- Limits of Qc
- Limits of Pgref
- Limits of Vl
- Limits of Qg
- Limits of S
2.4. Constraints Processing
2.4.1. Penalty Function Approach
2.4.2. Proposed Constraints-Prior Pareto-Domination Approach
3. MOFA Algorithm
3.1. Basic Firefly Algorithm
3.2. MOFA-PFA Algorithm
3.3. MOFA-CPA Algorithm
3.4. Stopping Condition
4. Simulation Results and Analysis
4.1. Algorithm Parameters
4.2. PF Computation of IEEE30
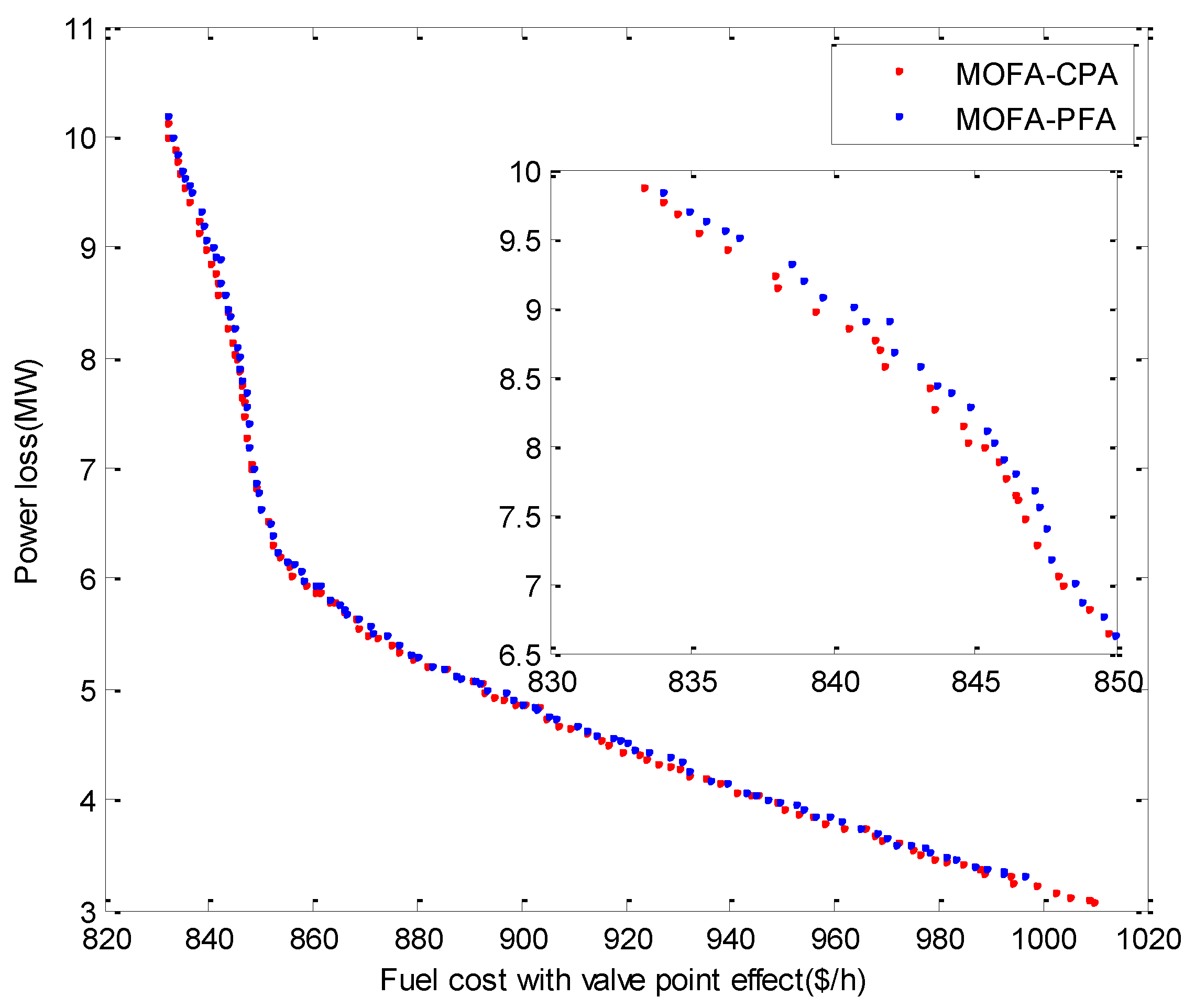
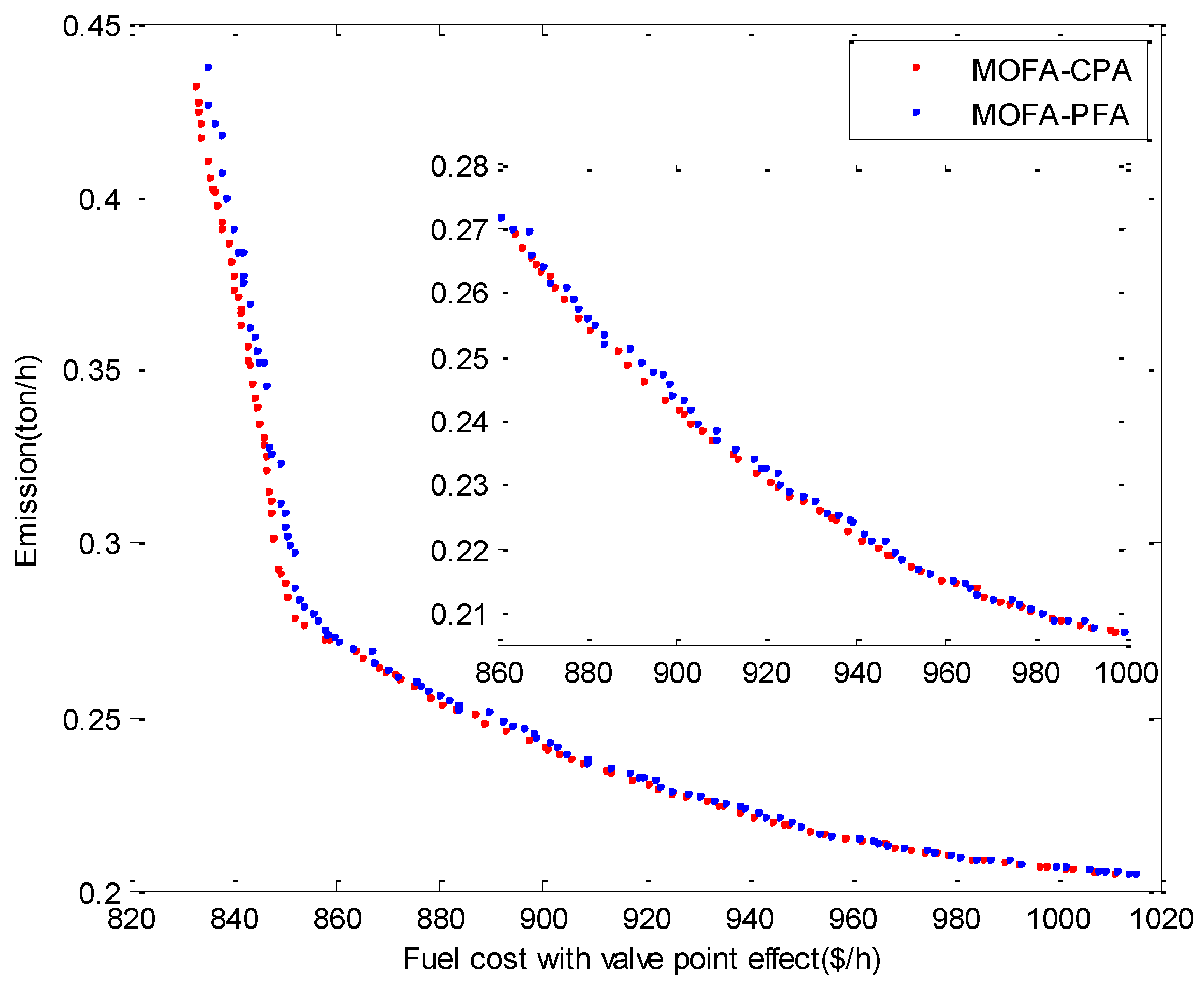
4.3. Analysis of the BCSs for Cases 1–5
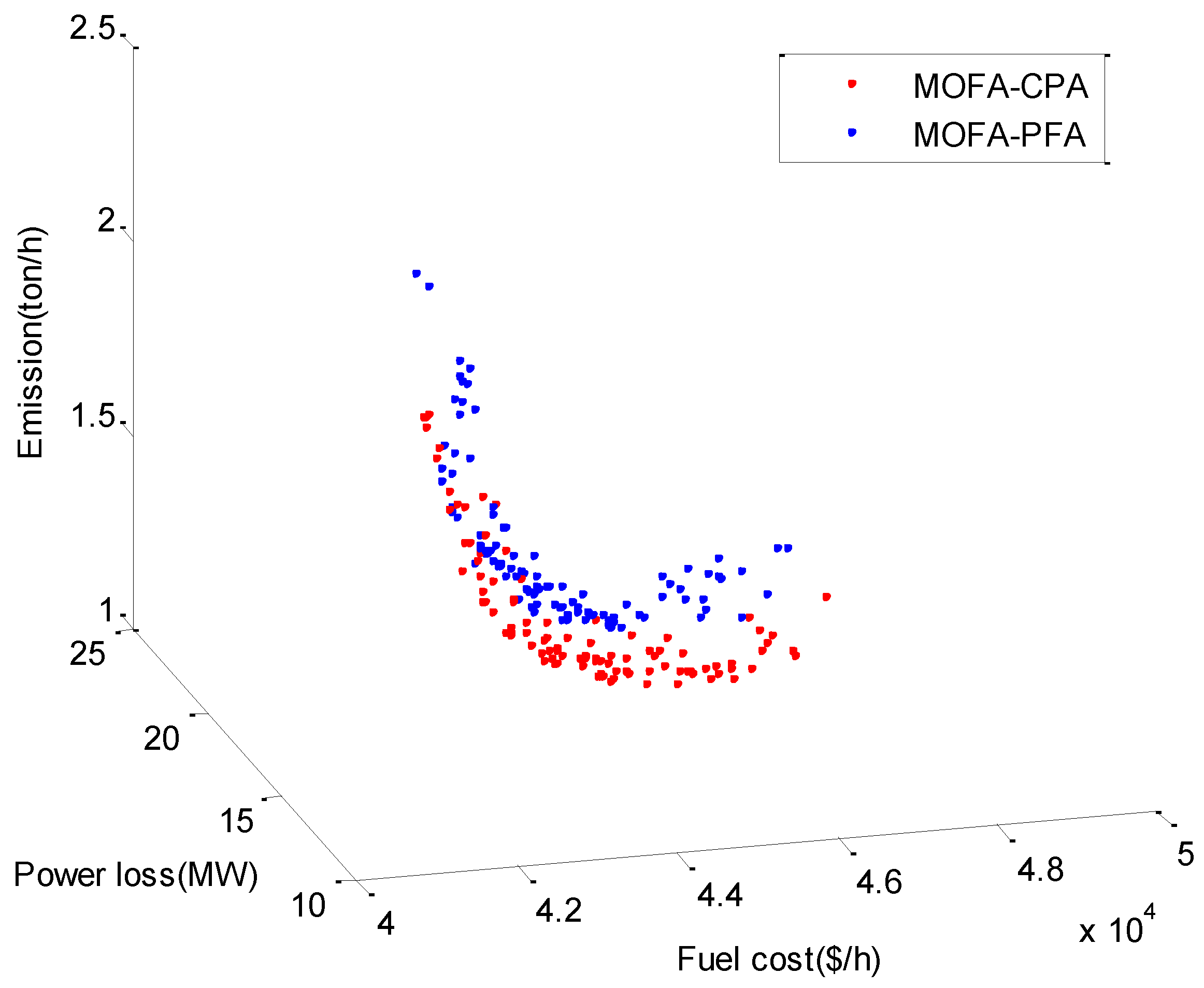
4.4. PF Computation of IEEE57
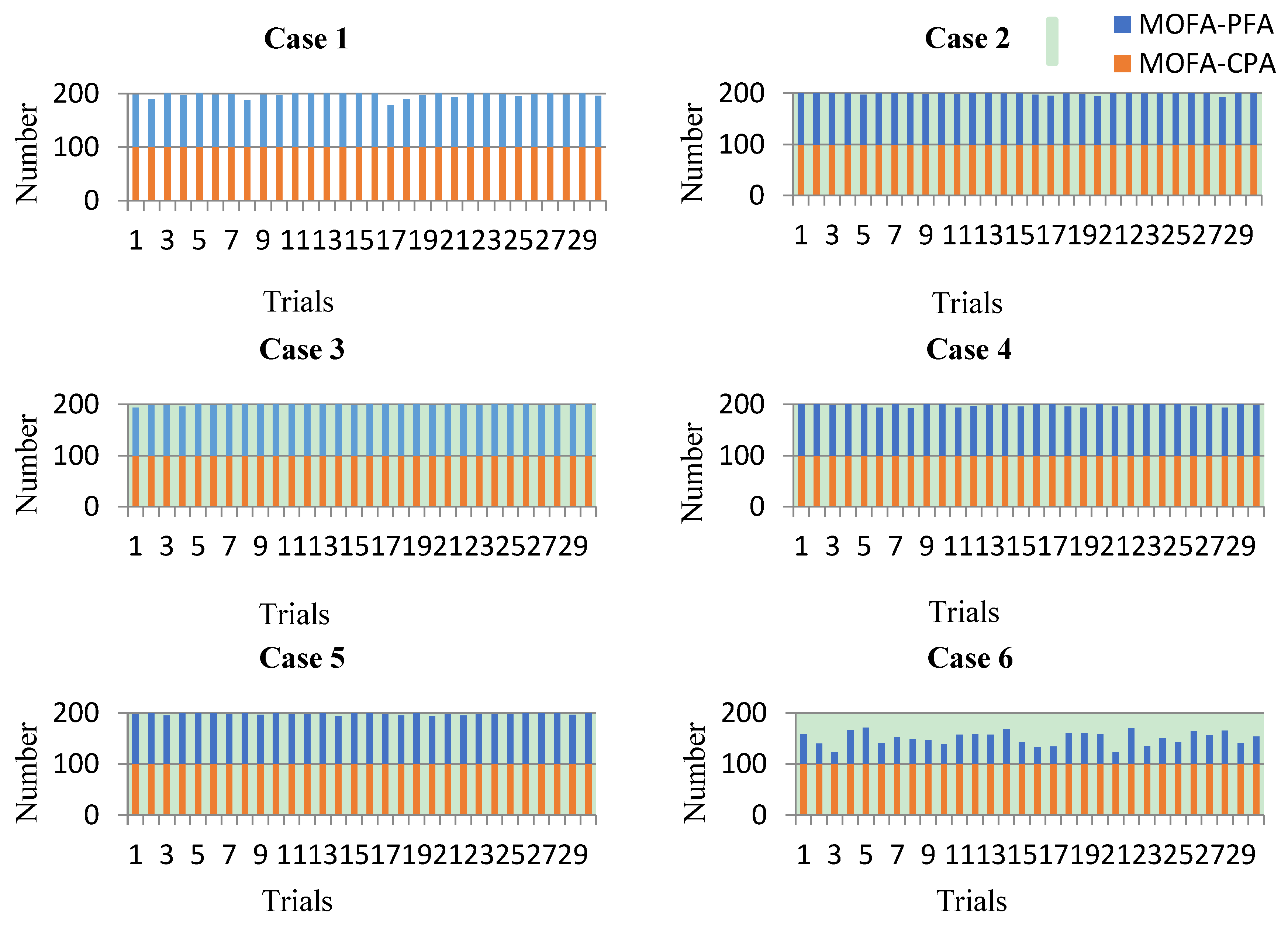
4.5. Analysis of the Constraints Processing
4.6. Performance Evaluation
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Appendix A

References
- Chen, G.; Liu, L.; Song, P.; Du, Y. Chaotic improved PSO-based multi-objective optimization for minimization of power losses and L index in power systems. Energy Convers. Manag. 2014, 86, 548–560. [Google Scholar] [CrossRef]
- Zhou, J.; Xu, Y.; Zheng, Y.; Zhang, Y. Optimization of Guide Vane Closing Schemes of Pumped Storage Hydro Unit Using an Enhanced Multi-Objective Gravitational Search Algorithm. Energies 2017, 10, 911. [Google Scholar] [CrossRef]
- Amrane, Y.; Boudour, M.; Ladjici, A.A.; Elmaouhab, A. Optimal VAR control for real power loss minimization using differential evolution algorithm. Int. J. Electr. Power Energy Syst. 2015, 66, 262–271. [Google Scholar] [CrossRef]
- Biswas, P.P.; Suganthan, P.N.; Mallipeddi, R.; Amaratunga, G.A.J. Optimal power flow solutions using differential evolution algorithm integrated with effective constraint handling techniques. Eng. Appl. Artif. Intell. 2018, 68, 81–100. [Google Scholar] [CrossRef]
- Elsaiah, S.; Cai, N.; Benidris, M.; Mitra, J. Fast economic power dispatch method for power system planning studies. IET Gener. Transm. Distrib. 2015, 9, 417–426. [Google Scholar] [CrossRef]
- Bhowmik, A.R.; Chakraborty, A.K. Solution of optimal power flow using nondominated sorting multi objective gravitational search algorithm. Int. J. Electr. Power Energy Syst. 2014, 62, 323–334. [Google Scholar] [CrossRef]
- Chaib, A.E.; Bouchekara, H.R.E.H.; Mehasni, R.; Abido, M.A. Optimal power flow with emission and non-smooth cost functions using backtracking search optimization algorithm. Int. J. Electr. Power Energy Syst. 2016, 81, 64–77. [Google Scholar] [CrossRef]
- Warid, W.; Hizam, H.; Mariun, N.; Abdul-Wahab, N. Optimal Power Flow Using the Jaya Algorithm. Energies 2016, 9, 678. [Google Scholar] [CrossRef]
- He, X.; Wang, W.; Jiang, J.; Xu, L. An Improved Artificial Bee Colony Algorithm and Its Application to Multi-Objective Optimal Power Flow. Energies 2015, 8, 2412–2437. [Google Scholar] [CrossRef]
- Niknam, T.; Narimani, M.R.; Jabbari, M.; Malekpour, A.R. A modified shuffle frog leaping algorithm for multi-objective optimal power flow. Energy 2011, 36, 6420–6432. [Google Scholar] [CrossRef]
- Sahu, S.; Barisal, A.K.; Kaudi, A. Multi-objective optimal power flow with DG placement using TLBO and MIPSO: A comparative study. Energy Procedia 2017, 117, 236–243. [Google Scholar] [CrossRef]
- Kim, H.-Y.; Kim, M.-K.; Kim, S. Multi-Objective Scheduling Optimization Based on a Modified Non-Dominated Sorting Genetic Algorithm-II in Voltage Source Converter−Multi-Terminal High Voltage DC Grid-Connected Offshore Wind Farms with Battery Energy Storage Systems. Energies 2017, 10, 986. [Google Scholar] [CrossRef]
- Zhang, J.; Tang, Q.; Li, P.; Deng, D.; Chen, Y. A modified MOEA/D approach to the solution of multi-objective optimal power flow problem. Appl. Soft Comput. 2016, 47, 494–514. [Google Scholar] [CrossRef]
- Yu, W.-J.; Ji, J.-Y.; Gong, Y.-J.; Yang, Q.; Zhang, J. A tri-objective differential evolution approach for multimodal optimization. Inf. Sci. 2018, 423, 1–23. [Google Scholar] [CrossRef]
- Barocio, E.; Regalado, J.; Cuevas, E.; Uribe, F.; Zúñiga, P.; Torres, P.J.R. Modified bio-inspired optimisation algorithm with a centroid decision making approach for solving a multi-objective optimal power flow problem. IET Gener. Transm. Distrib. 2017, 11, 1012–1022. [Google Scholar] [CrossRef]
- Bhowmik, A.R.; Chakraborty, A.K.; Babu, K.N. Multi objective optimal power flow using NSMOGSA. In Proceedings of the 2014 International Conference on Circuits, Power and Computing Technologies [ICCPCT], Nagercoil, India, 20–21 March 2014; pp. 84–88. [Google Scholar]
- Sedighizadeh, M.; Bakhtiary, R. Optimal multi-objective reconfiguration and capacitor placement of distribution systems with the Hybrid Big Bang–Big Crunch algorithm in the fuzzy framework. Ain Shams Eng. J. 2016, 7, 113–129. [Google Scholar] [CrossRef]
- Mohamed, A.-A.A.; Mohamed, Y.S.; El-Gaafary, A.A.M.; Hemeida, A.M. Optimal power flow using moth swarm algorithm. Electr. Power Syst. Res. 2017, 142, 190–206. [Google Scholar] [CrossRef]
- Chaine, S.; Tripathy, M.; Jain, D. Non dominated Cuckoo search algorithm optimized controllers to improve the frequency regulation characteristics of wind thermal power system. Eng. Sci. Technol. Int. J. 2017, 20, 1092–1105. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Rezaei Adaryani, M.; Karami, A. Artificial bee colony algorithm for solving multi-objective optimal power flow problem. Int. J. Electr. Power Energy Syst. 2013, 53, 219–230. [Google Scholar] [CrossRef]
- Kumari, M.S.; Maheswarapu, S. Enhanced Genetic Algorithm based computation technique for multi-objective Optimal Power Flow solution. Int. J. Electr. Power Energy Syst. 2010, 32, 736–742. [Google Scholar] [CrossRef]
- Chen, H.; Bo, M.L.; Zhu, Y. Multi-hive bee foraging algorithm for multi-objective optimal power flow considering the cost, loss, and emission. Int. J. Electr. Power Energy Syst. 2014, 60, 203–220. [Google Scholar] [CrossRef]
- Warid, W.; Hizam, H.; Mariun, N.; Abdul Wahab, N.I. A novel quasi-oppositional modified Jaya algorithm for multi-objective optimal power flow solution. Appl. Soft Comput. 2018, 65, 360–373. [Google Scholar] [CrossRef]
- Chen, G.; Yi, X.; Zhang, Z.; Wang, H. Applications of multi-objective dimension-based firefly algorithm to optimize the power losses, emission, and cost in power systems. Appl. Soft Comput. 2018, 68, 322–342. [Google Scholar] [CrossRef]
- Verma, O.P.; Aggarwal, D.; Patodi, T. Opposition and dimensional based modified firefly algorithm. Expert Syst. Appl. 2016, 44, 168–176. [Google Scholar] [CrossRef]
- Wang, H.; Wang, W.; Zhou, X.; Sun, H.; Zhao, J.; Yu, X.; Cui, Z. Firefly algorithm with neighborhood attraction. Inf. Sci. 2017, 382–383, 374–387. [Google Scholar] [CrossRef]
- Deo, R.C.; Ghorbani, M.A.; Samadianfard, S.; Maraseni, T.; Bilgili, M.; Biazar, M. Multi-layer perceptron hybrid model integrated with the firefly optimizer algorithm for windspeed prediction of target site using a limited set of neighboring reference station data. Renew. Energy 2018, 116, 309–323. [Google Scholar] [CrossRef]
- Roy, P.; Roy, P.; Chakrabarti, A. Modified shuffled frog leaping algorithm with genetic algorithm crossover for solving economic load dispatch problem with valve-point effect. Appl. Soft Comput. 2013, 13, 4244–4252. [Google Scholar] [CrossRef]
- Rao, B.S.; Vaisakh, K. Application of ACSA for solving multi-objective optimal power flow problem with load uncertainty. In Proceedings of the 2013 IEEE International Conference on Emerging Trends in Computing, Communication and Nanotechnology (ICECCN), Tirunelveli, India, 25–26 March 2013; pp. 764–771. [Google Scholar]
- Sivasubramani, S.; Swarup, K.S. Multi-objective harmony search algorithm for optimal power flow problem. Int. J. Electr. Power Energy Syst. 2011, 33, 745–752. [Google Scholar] [CrossRef]
- Medina, M.A.; Das, S.; Coello Coello, C.A.; Ramírez, J.M. Decomposition-based modern metaheuristic algorithms for multi-objective optimal power flow—A comparative study. Eng. Appl. Artif. Intell. 2014, 32, 10–20. [Google Scholar] [CrossRef]
- Man-Im, A.; Ongsakul, W.; Singh, J.G.; Boonchuay, C. Multi-objective optimal power flow using stochastic weight trade-off chaotic NSPSO. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies—Asia (ISGT ASIA), Bangkok, Thailand, 3–6 November 2015; pp. 1–8. [Google Scholar]
- Shaheen, A.M.; El-Sehiemy, R.A.; Farrag, S.M. Solving multi-objective optimal power flow problem via forced initialised differential evolution algorithm. IET Gener. Transm. Distrib. 2016, 10, 1634–1647. [Google Scholar] [CrossRef]
- Ghasemi, M.; Ghavidel, S.; Ghanbarian, M.M.; Gharibzadeh, M.; Azizi Vahed, A. Multi-objective optimal power flow considering the cost, emission, voltage deviation and power losses using multi-objective modified imperialist competitive algorithm. Energy 2014, 78, 276–289. [Google Scholar] [CrossRef]
- Sumetha, A.; Pornrapeepat, B. A multi-objective bees algorithm for multi-objective optimal power flow problem. In Proceedings of the 8th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Khon Kaen, Thailand, 17–19 May 2011; pp. 852–856. [Google Scholar]
- Deb, K.; Jain, H. An Evolutionary Many-Objective Optimization Algorithm Using Reference-Point-Based Nondominated Sorting Approach, Part I: Solving Problems With Box Constraints. IEEE Trans. Evol. Comput. 2014, 18, 577–601. [Google Scholar] [CrossRef]
- Narimani, M.R.; Azizipanah-Abarghooee, R.; Zoghdar-Moghadam-Shahrekohne, B.; Gholami, K. A novel approach to multi-objective optimal power flow by a new hybrid optimization algorithm considering generator constraints and multi-fuel type. Energy 2013, 49, 119–136. [Google Scholar] [CrossRef]
- While, L.; Bradstreet, L.; Barone, L. A Fast Way of Calculating Exact Hypervolumes. IEEE Trans. Evol. Comput. 2012, 16, 86–95. [Google Scholar] [CrossRef]
- While, L.; Hingston, P.; Barone, L.; Huband, S. A faster algorithm for calculating hypervolume. IEEE Trans. Evol. Comput. 2006, 10, 29–38. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 population initialization; |
| 2 while t ≤ maximum iteration Tmax |
| 3 read the algorithm parameters; |
| 4 set penalty factors KV, KQ, KS, KL; |
| 5 calculate the value of the objective functions as Section 2.1 shown; |
| 6 calculate the penalty according to the Equation (20), and added to the objective functions; |
| 7 for i = 1 to NF do |
| 8 for j = 1 to NF do |
| 9 if cjold Pareto-dominates ciold according to Equation (22) |
| 10 generate new solution cinew as Equation (24) shown; |
| 11 if cinew Pareto-dominates ciold |
| 12 select cinew as the new solution in the FP; |
| 13 end |
| 14 else |
| 15 select ciold as the new solution in the FP; |
| 16 end |
| 17 end |
| 18 end |
| 19 end |
| 20 update and output the Pareto optimal solutions to next iterations; |
| 21 sort and find the current best approximation to the Pareto front; |
| 22 t++; |
| 23 end |
| 1 population initialization; |
| 2 while t ≤ maximum iteration Tmax |
| 3 read the algorithm parameters; |
| 4 calculate the value of the objective functions as Section 2.1 shown; |
| 5 for i = 1 to NF do |
| 6 for j = 1 to NF do |
| 7 if cjold constraints-prior Pareto-dominates ciold using proposed CPA in Section 2.4.2; |
| 8 generate new solution cinew as Equation (24) shown; |
| 9 if cinew constraints-prior Pareto-dominates ciold |
| 10 select cinew as the new solution in the FP; |
| 11 end |
| 12 else |
| 13 select ciold as the new solution in the FP; |
| 14 end |
| 15 end |
| 16 end |
| 17 end |
| 18 update and output the Pareto optimal solutions to next iterations; |
| 19 sort and find the current best approximation to the Pareto front; |
| 20 t++; |
| 21 end |
| Test Cases | Objective Combinations | Test System |
|---|---|---|
| Case 1 | min f1 = fcost&f2 = fPloss | IEEE 30 |
| Case 2 | min f1 = fcost_vp&f2 = fPloss | |
| Case 3 | min f1 = fcost_vp&f2 = femission | |
| Case 4 | min f1 = fcost&f2 = fPloss&f3 = femission | |
| Case 5 | min f1 = fcost_vp&f2 = fPloss&f3 = femission | |
| Case 6 | min f1 = fcost&f2 = fPloss&f3 = femission | IEEE 57 |
| Parameters | Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | Case 6 |
|---|---|---|---|---|---|---|
| FP Size | 100 | 100 | 100 | 100 | 100 | 100 |
| Tmax | 300 | 300 | 300 | 500 | 500 | 500 |
| γ | 1 | 1 | 1 | 1 | 1 | 1 |
| α | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| β0 | 1 | 1 | 1 | 1 | 1 | 1 |
| Trials | 30 | 30 | 30 | 30 | 30 | 30 |
| Variables | Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Alg1 1 | Alg2 2 | Alg1 | Alg2 | Alg1 | Alg2 | Alg1 | Alg2 | Alg1 | Alg2 | |
| Pg2 (MW) | 52.171 | 54.788 | 53.613 | 49.098 | 64.174 | 57.294 | 57.647 | 57.890 | 61.750 | 59.497 |
| Pg5 (MW) | 32.314 | 34.118 | 30.305 | 29.139 | 23.342 | 24.599 | 39.791 | 36.290 | 30.736 | 31.945 |
| Pg8 (MW) | 35.000 | 34.515 | 34.428 | 35.000 | 34.687 | 33.050 | 35.000 | 35.000 | 35.000 | 34.633 |
| Pg11 (MW) | 28.381 | 30.000 | 22.187 | 23.853 | 17.439 | 22.333 | 28.504 | 29.271 | 29.457 | 30.000 |
| Pg13 (MW) | 22.252 | 25.079 | 13.928 | 17.249 | 15.483 | 18.837 | 35.413 | 40.000 | 27.389 | 27.781 |
| Vg1 (p.u.) | 1.100 | 1.1000 | 1.1000 | 1.1000 | 1.1000 | 1.0402 | 1.1000 | 1.0985 | 1.0965 | 1.0920 |
| Vg2 (p.u.) | 1.089 | 1.0936 | 1.0902 | 1.0923 | 1.0933 | 1.0262 | 1.0887 | 1.0869 | 1.0904 | 1.0848 |
| Vg5 (p.u.) | 1.063 | 1.0769 | 1.0646 | 1.0631 | 1.0804 | 1.0053 | 1.0690 | 1.0625 | 1.0687 | 1.0642 |
| Vg8 (p.u.) | 1.074 | 1.0822 | 1.0804 | 1.0811 | 1.0688 | 1.0084 | 1.0777 | 1.0767 | 1.0743 | 1.0744 |
| Vg11 (p.u.) | 1.100 | 1.1000 | 1.1000 | 1.0714 | 1.0713 | 1.0663 | 1.0951 | 1.0857 | 1.0892 | 1.0901 |
| Vg13 (p.u.) | 1.100 | 1.0894 | 1.1000 | 1.0422 | 1.1000 | 1.0668 | 1.0941 | 1.0386 | 1.0517 | 1.0413 |
| T11 (p.u.) | 0.9832 | 1.0160 | 1.0210 | 1.0760 | 0.9290 | 0.9780 | 1.0140 | 1.0860 | 1.0760 | 1.0730 |
| T12 (p.u.) | 0.9319 | 0.9650 | 0.9270 | 0.9850 | 1.0390 | 0.9920 | 0.9240 | 0.9930 | 0.9400 | 1.0030 |
| T15 (p.u.) | 1.0068 | 0.9960 | 0.9870 | 1.0440 | 1.0170 | 1.0560 | 0.9930 | 1.0520 | 0.9650 | 1.0400 |
| T36 (p.u.) | 0.9696 | 0.9710 | 0.9650 | 1.0110 | 1.0240 | 0.9690 | 0.9640 | 1.0770 | 0.9890 | 1.0200 |
| Qc10 (p.u.) | 0.0258 | 0.0350 | 0.0230 | 0.0060 | 0.0150 | 0.0240 | 0.0350 | 0.0140 | 0.0460 | 0.0160 |
| Qc12 (p.u.) | 0.0389 | 0.0000 | 0.0250 | 0.0140 | 0.0130 | 0.0240 | 0.0350 | 0.0220 | 0.0020 | 0.0110 |
| Qc15 (p.u.) | 0.0301 | 0.0280 | 0.0320 | 0.0170 | 0.0210 | 0.0250 | 0.0320 | 0.0080 | 0.0470 | 0.0000 |
| Qc17(p.u.) | 0.0032 | 0.0410 | 0.0110 | 0.0310 | 0.0110 | 0.0080 | 0.0120 | 0.0250 | 0.0410 | 0.0210 |
| Qc20 (p.u.) | 0.0407 | 0.0220 | 0.0350 | 0.0400 | 0.0310 | 0.0360 | 0.0420 | 0.0390 | 0.0340 | 0.0040 |
| Qc21 (p.u.) | 0.0319 | 0.0170 | 0.0050 | 0.0100 | 0.0270 | 0.0460 | 0.0080 | 0.0270 | 0.0290 | 0.0310 |
| Qc23 (p.u.) | 0.0225 | 0.0300 | 0.0330 | 0.0450 | 0.0400 | 0.0360 | 0.0250 | 0.0100 | 0.0060 | 0.0130 |
| Qc24 (p.u.) | 0.0396 | 0.0260 | 0.0480 | 0.0250 | 0.0490 | 0.0170 | 0.0460 | 0.0170 | 0.0240 | 0.0360 |
| Qc29 (p.u.) | 0.0243 | 0.0230 | 0.0140 | 0.0090 | 0.0390 | 0.0290 | 0.0230 | 0.0500 | 0.0220 | 0.0420 |
| Fuel cost | 833.94 | 845.01 | 858.50 | 860.37 | 852.02 | 859.47 | 878.13 | 879.91 | 916.59 | 918.57 |
| Power loss | 5.0075 | 4.6727 | 5.9031 | 5.9547 | - | - | 3.9232 | 4.2179 | 4.7780 | 4.7949 |
| Emission | - | - | - | - | 0.2788 | 0.2733 | 0.2161 | 0.2165 | 0.2322 | 0.2323 |
| Algorithms | Population Size | Maximum Iteration | Trials | Approach | Fuel Cost | Power Loss |
|---|---|---|---|---|---|---|
| MOFA-CPA | 100 | 300 | 30 | CPA | 833.94 | 5.0075 |
| MOFA-PFA | 100 | 300 | 30 | PFA | 845.01 | 4.6727 |
| MOEA/D [13] | 100 | 500 | 31 | PFA | 835.36 | 4.9099 |
| NSGA-II [13] | 100 | 500 | 31 | PFA | 833.57 | 5.199 |
| MOACSA [30] | 50 | 500 | - | PFA | 837.7994 | 4.9342 |
| MODE [30] | 100 | 300 | - | PFA | 828.59 | 5.69 |
| MOHS [31] | 20 | 1000 | - | - | 832.6709 | 5.3143 |
| NSGA-II [31] | 20 | 1000 | - | - | 837.416 | 5.2397 |
| MOABC/D [32] | 100 | 1000 | 20 | PFA | 827.636 | 5.2451 |
| MOTLA/D [32] | 100 | 1000 | 20 | PFA | 826.446 | 5.3074 |
| NS_CPSO [33] | 100 | 1000 | 50 | PFA | 837.8715 | 4.8173 |
| SWTC_NSPSO [33] | 100 | 1000 | 50 | PFA | 841.1731 | 4.6846 |
| MO-DEA [34] | 50 | 300 | 30 | PFA | 820.8802 | 5.5949 |
| ICA [35] | 120 | 500 | 50 | PFA | 848.0544 | 4.5603 |
| Algorithms | Population Size | Maximum Iteration | Trials | Approach | Fuel Cost | Power Loss | Emission |
|---|---|---|---|---|---|---|---|
| MOFA-CPA | 100 | 300 | 30 | CPA | 878.13 | 3.9232 | 0.2171 |
| MOFA-PFA | 100 | 300 | 30 | PFA | 879.91 | 4.2179 | 0.2165 |
| MOEA/D [13] | 100 | 500 | 31 | PFA | 902.54 | 3.4594 | 0.2107 |
| MOPSO [13] | 100 | 500 | 31 | PFA | 897.48 | 3.9557 | 0.2144 |
| WA [36] | 80 | 300 | - | - | 897.2797 | 4.6211 | 0.2175 |
| Variables | Alg1 1 | Alg2 2 | Variables | Alg1 | Alg2 | variables | Alg1 | Alg2 |
|---|---|---|---|---|---|---|---|---|
| Pg2 (MW) | 72.0680 | 90.9355 | Vg9 (p.u.) | 1.0696 | 1.0237 | T58 (p.u.) | 0.9820 | 0.9550 |
| Pg3 (MW) | 78.0025 | 87.0173 | Vg12 (p.u.) | 1.0592 | 1.0131 | T59 (p.u.) | 1.0010 | 0.9410 |
| Pg6 (MW) | 100.0000 | 100.0000 | T19 (p.u.) | 1.0310 | 0.9150 | T65 (p.u.) | 0.9930 | 0.9550 |
| Pg8 (MW) | 328.7255 | 334.1000 | T20 (p.u.) | 1.0210 | 0.9380 | T66 (p.u.) | 1.0020 | 0.9040 |
| Pg9 (MW) | 100.0000 | 100.0000 | T31 (p.u.) | 1.0780 | 1.0310 | T71 (p.u.) | 1.0000 | 0.9380 |
| Pg12 (MW) | 395.0391 | 406.3353 | T35 (p.u.) | 0.9670 | 0.9260 | T73 (p.u.) | 1.0410 | 0.9380 |
| Vg1 (p.u.) | 1.0784 | 1.0464 | T36 (p.u.) | 0.9810 | 0.9800 | T76 (p.u.) | 1.0090 | 1.0130 |
| Vg2 (p.u.) | 1.0705 | 1.0384 | T37 (p.u.) | 0.9980 | 1.0550 | T80 (p.u.) | 0.9820 | 1.0240 |
| Vg3 (p.u.) | 1.0686 | 1.0252 | T41 (p.u.) | 0.9810 | 0.9860 | Qc18 (p.u.) | 0.1820 | 0.0690 |
| Vg6 (p.u.) | 1.0717 | 1.0331 | T46 (p.u.) | 1.0010 | 0.9000 | Qc25 (p.u.) | 0.1330 | 0.0560 |
| Vg8 (p.u.) | 1.0750 | 1.0279 | T54 (p.u.) | 0.9020 | 0.9720 | Qc53 (p.u.) | 0.1710 | 0.0640 |
| Fuel cost | 42639.96 | 42665.51 | ||||||
| Emission | 11.2686 | 11.7785 | ||||||
| Power loss | 1.4928 | 1.5234 |
| Algorithms | Success Rate | |||||
|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | Case 6 | |
| MOFA-CPA | 30/30 | 30/30 | 30/30 | 30/30 | 30/30 | 30/30 |
| MOFA-PFA | 13/30 | 15/30 | 20/30 | 16/30 | 9/30 | 0/30 |
| Algorithm | Quality Indictor | Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | Case 6 | |
|---|---|---|---|---|---|---|---|---|
| MOFA-CPA | HV | Mean | 759.14 | 1060.53 | 35.32 | 110.96 | 205.93 | 602,013.21 |
| Std | 6.93 | 8.22 | 0.43 | 0.54 | 3.16 | 53,158.19 | ||
| SPREAD | Mean | 0.74 | 0.73 | 0.88 | 0.76 | 0.77 | 0.73 | |
| Std | 0.02 | 0.02 | 0.02 | 0.03 | 0.04 | 0.03 | ||
| MOFA-PFA | HV | Mean | 739.70 | 1050.39 | 35.09 | 88.33 | 204.07 | 598,973.46 |
| Std | 6.93 | 7.62 | 0.39 | 3.69 | 3.66 | 54,066.57 | ||
| p | 1.73 × 10−6 | 5.75 × 10−6 | 0.0495 | 1.73 × 10−6 | 0.0571 | 0.6733 | ||
| h | 1 | 1 | 1 | 1 | 0 | 0 | ||
| SPREAD | Mean | 0.85 | 0.86 | 0.89 | 0.94 | 0.79 | 0.83 | |
| Std | 0.01 | 0.01 | 0.02 | 0.02 | 0.04 | 0.02 | ||
| p | 1.73 × 10−6 | 1.73 × 10−6 | 0.2369 | 1.73 × 10−6 | 0.0687 | 1.73 × 10−6 | ||
| h | 1 | 1 | 0 | 1 | 0 | 1 | ||
| Algorithms | Mean CPU Time (sec)/Tmax | |||||
|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | Case 6 | |
| MOFA-CPA | 145.93/300 | 166.53/300 | 168.71/300 | 315.21/500 | 332.13/500 | 519.25/500 |
| MOFA-PFA | 153.74/300 | 169.68/300 | 170.38/300 | 319.54/500 | 336.14/500 | 525.12/500 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, G.; Yi, X.; Zhang, Z.; Lei, H. Solving the Multi-Objective Optimal Power Flow Problem Using the Multi-Objective Firefly Algorithm with a Constraints-Prior Pareto-Domination Approach. Energies 2018, 11, 3438. https://doi.org/10.3390/en11123438
Chen G, Yi X, Zhang Z, Lei H. Solving the Multi-Objective Optimal Power Flow Problem Using the Multi-Objective Firefly Algorithm with a Constraints-Prior Pareto-Domination Approach. Energies. 2018; 11(12):3438. https://doi.org/10.3390/en11123438
Chicago/Turabian StyleChen, Gonggui, Xingting Yi, Zhizhong Zhang, and Hangtian Lei. 2018. "Solving the Multi-Objective Optimal Power Flow Problem Using the Multi-Objective Firefly Algorithm with a Constraints-Prior Pareto-Domination Approach" Energies 11, no. 12: 3438. https://doi.org/10.3390/en11123438
APA StyleChen, G., Yi, X., Zhang, Z., & Lei, H. (2018). Solving the Multi-Objective Optimal Power Flow Problem Using the Multi-Objective Firefly Algorithm with a Constraints-Prior Pareto-Domination Approach. Energies, 11(12), 3438. https://doi.org/10.3390/en11123438